Область техники, к которой относится изобретение
Изобретение относится к тормозным системам технических средств, преимущественно транспортных средств, а именно к электропневматическим тормозам пассажирских поездов с локомотивной тягой.
Уровень техники
Известна схема устройства двухпроводного электропневматического тормоза /1, с.239-243/, обеспечивающая требуемые режимы работы электровоздухораспределигелей подвижных единиц в составе пассажирского поезда с локомотивной тягой с одновременным осуществлением оценки исправности электрических цепей провода рельсового заземлителя и линейных проводов - контрольного и рабочего.
Недостатками реализуемого в известном устройстве способа действия электропневматического тормоза являются: опасность электротравмирования; прекращение действия электровоздухораспределителей даже при единичном повреждении электрической цепи линейных проводов и невозможность контроля протекания тормозных процессов.
Известна схема устройства дублированного питания двухпроводного электропневматического тормоза /1, с.244, абз. 3-6/, обеспечивающая работоспособность электропневматического тормоза при повреждениях в контрольном проводе или в одном из узлов рабочего провода.
Недостатками реализуемого в известной схеме устройстве дублированного питания способа действия электропневматического тормоза являются: опасность электротравмирования; прекращение действия электровоздухораспределигелей при повреждениях более чем в одном из узлов рабочего провода; возможность применения только в поездах, обращающихся со скоростью до 120 км/ч, и невозможность контроля протекания тормозных процессов.
Известна также схема устройства дублированного питания двухпроводного электропневматического тормоза /1, с.244, абз. 7 и с.245, абз. 1-3/ с использованием специального блока управления и контроля, обеспечивающая возможность применения в поездах, обращающихся со скоростью более 120 км/ч.
Недостатками реализуемого в известной схеме устройства дублированного питания с использованием специального блока управления и контроля способа действия электропневматического тормоза являются: опасность электротравмирования; прекращение действия электровоздухораспределителей при повреждениях более чем в одном из узлов рабочего провода и невозможность контроля протекания тормозных процессов в составе поезда.
Наиболее близким техническим решением является схема модернизированного электропневматического тормоза железнодорожных подвижных единиц /2/, в котором исключена опасность электротравмирования и обеспечивается: сохранение действия электровоздухораспределителей при множественных повреждениях электрической цепи линейных проводов; возможность применения его в поездах, обращающихся со скоростью более 120 км/ч; контроль протекания тормозных процессов в составе поезда в условиях электропневматического управления тормозами.
Недостатком реализуемого в известной схеме модернизированного электропневматического тормоза железнодорожных подвижных единиц способа является невозможность контроля протекания тормозных процессов в составе поезда в условиях пневматического управления тормозами.
Сущность изобретения
Целью предложенного способа является достижение возможности контроля протекания тормозных процессов в составе пассажирского поезда с локомотивной тягой поезда в условиях как электропневматического, так и пневматического управления тормозами.
Поставленная цель достигается следующим. Электропневматический тормоз содержит дополняющие штатные устройства автоматического пневматического тормоза подвижных единиц состава поезда, элементы электрической цепи, электровоздухораспределители и приборы управления. Элементы электрической цепи содержат линейные провода, датчики торможения подвижных единиц и дополнительную головку концевой заделки. Линейные провода включают в себя рабочий и контрольный провода, которые объединяют через специальные контакты, размещаемые в головках соединительных рукавов тормозной магистрали, в единую поездную линию, которую шунтируют замыкающими контактами датчиков торможения на каждой подвижной единице. На хвостовом вагоне эту линию связывают через включенный в проводящем направлении от контрольного к рабочему проводу полупроводниковый диод дополнительной головки концевой заделки. Электровоздухораспределители подключают к электрической силовой линии, состоящей из рабочего провода и используемых в качестве обратного провода ходовых рельсов, связь с которыми осуществляют с помощью провода локомотивного рельсового заземлителя. Приборы управления содержат выключатель блока питания с гальванически независимыми между собой и от аккумуляторной батареи локомотива контрольным и рабочим источниками постоянного тока, от которых осуществляют питание блока управления. Блоком управления, взаимодействующим с контроллером крана машиниста, отслеживают перемещения ручки последнего. Этим обусловливают идентифицируемые по индикации ламп светового сигнализатора нормируемые режимы работы, которые предопределяются надлежащим электропитанием электрической силовой линии. При наличии на вагонах упомянутых датчиков торможения на блоке управления включают должный выключатель. В этих обстоятельствах алгоритмом работы блока управления осуществляют непрерывное чередование посылок в цепь поездной линии импульсов прямой и обратной полярностей от изолированного от ходовых рельсов контрольного источника тока. Прохождение импульса прямой полярности, направление протекания которого совпадает с проводимостью полупроводникового диода дополнительной концевой заделки, идентифицируют как свидетельство целости электрической цепи поездной линии. Такое ее состояние индицируют горением соответствующей лампы светового сигнализатора, а ее миганием индицируют непрохождение импульса прямой полярности и идентифицируют как свидетельство нарушения целости электрической цепи поездной линии. Прохождение импульса обратной полярности, направление протекания которого встречно проводимости полупроводникового диода дополнительной концевой заделки, свидетельствует о замкнутом состоянии замыкающего контакта хотя бы одного упомянутого датчика торможения. Это идентифицируют как свидетельство заторможенного состояния хотя бы одной подвижной единицы в составе поезда, что индицируют миганием надлежащей лампы светового сигнализатора. Осуществляют также подачу на клемму с подключенным проводом локомотивного рельсового заземлителя и заземленную бонку корпуса блока управления напряжения от рабочего источника тока. Такую подачу обеспечивают синхронно с посылкой импульса обратной полярности в цепь поездной линии с полярностью, соответствующей при необходимости реализуемому блоком управления режиму работы. Прохождение тока между указанными клеммой и бонкой от рабочего источника тока идентифицируют как исправность электрической цепи провода локомотивного рельсового заземлителя и индицируют горением упомянутой соответствующей лампы светового сигнализатора. В противном случае идентифицируют неисправность электрической цепи провода локомотивного рельсового заземлителя и индицируют миганием упомянутой соответствующей лампы светового сигнализатора. Предлагаемый способ действия электропневматического тормоза отличается следующим. В число приборов управления вводят специальный выключатель. С его помощью при необходимости перехода на пневматическое управление тормозами обеспечивают прерывание электрической цепи питания контроллера крана машиниста. Одновременно прерывают электрическую цепь питания соответствующей лампы светового сигнализатора, предназначенной для индикации в условиях электропневматического управления тормозами исправного состояния электрических цепей поездной линии и провода локомотивного рельсового заземлителя.
Заявляемое техническое решение соответствует критерию изобретения «Новизна» (N). Так сопоставительный анализ заявляемого решения с прототипом показывает отличия заявляемого решения от известного, заключающиеся в том, что:
1. В число приборов управления электропневматическим тормозом вводят специальный выключатель с двумя замыкающими контактами;
2. Электропитание контроллера крана машиниста осуществляют через один из замыкающих контактов специального выключателя;
3. Цепь питания соответствующей лампы светового сигнализатора, индицирующей исправное состояние электрических цепей поездной линии и локомотивного рельсового заземлителя в условиях электропневматического управления тормозами поезда, обеспечивают через другой замыкающий контакт специального выключателя.
Заявляемое техническое решение соответствует критерию «Изобретательский уровень» (IS). Так сравнение заявляемого решения с известными в технике решениями показывает, что введение в электрические схемы различного рода выключателей широко известны. Однако их внедрение в предлагаемый способ действия электропневматического тормоза проявляет следующие новые свойства.
1) Введением специального выключателя в число приборов управления электропневматическим тормозом обеспечивают возможность контроля протекания тормозных процессов в пассажирском поезде в условиях как электропневматического, так и пневматического управления тормозами.
2) При необходимости перехода на пневматическое управление тормозами, например, в ситуации отказа электропневматических тормозов из-за пробоя полупроводникового диода ВС в электровоздухораспределителях или короткого замыкания в силовой линии осуществляют снятие электропитания только контроллера крана машиниста. Поэтому последующие переводы ручки крана машиниста при осуществлении машинистом процесса торможения поезда на пневматическом управлении не приводят к изменению режима работы блока правления, остающемся в этих условиях в поездном положении. Тем самым обеспечивают сохранение работы блока управления по непрерывному чередованию посылок в цепь поездной линии импульсов прямой и обратной полярностей. В результате достигают возможности сохранения контроля наличия в составе поезда заторможенных подвижных единиц по традиционной в этом случае индикации светового сигнализатора - миганию его надлежащей лампы. В прототипе же возможность контроля протекания тормозных процессов при переходе на пневматическое управление тормозами поезда исключена, так как возникновение такой ситуации вынуждает отключать полностью блоки питания и управления электропневматическим тормозом несмотря на сохраняющуюся их работоспособность.
3) Прерыванием цепи питания лампы светового сигнализатора, индицирующей исправное состояние электрических цепей поездной линии и провода локомотивного рельсового заземлителя на электропневматическом управлении тормозами поезда, обеспечивают дополнительную идентификацию осуществленного перехода на пневматическое управление. Как известно, на пневматическом управлении тормозами поезда для приведения-прекращения их действия требуется заблаговременное осуществление переводов ручки крана машиниста в тормозные-отпускные положения. Отсутствие нормированной индикации ламп светового сигнализатора в условиях мигания только его надлежащей лампы в процессе реализации очередного тормозного процесса является фактором, с помощью которого обеспечивают дополнительное напоминание об осуществлении торможения поезда на пневматическом управлении.
Заявляемое техническое решение соответствует критерию «Промышленная применимость» (IA), так как может быть реализовано в использующихся электрических схемах блоков питания и управления электропневматическим тормозом введением специального выключателя в число приборов управления.
Перечень чертежей
Изобретение поясняется схемами, иллюстрирующими специфику предлагаемого способа действия электропневматического тормоза.
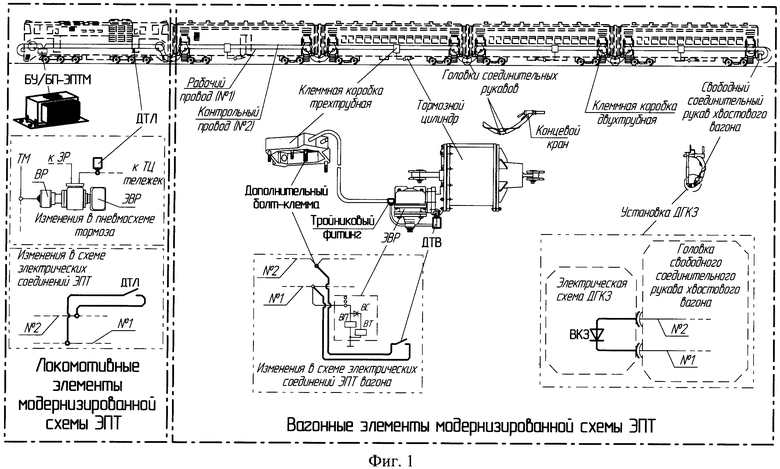
На фиг.1 представлена монтажная схема существующей модернизированной схемы электропневматического тормоза железнодорожных подвижных единиц. Она включает в себя локомотивные и вагонные элементы.
В состав локомотивных элементов входят:
- штатные компоненты автоматического пневматического тормоза локомотива, содержащие, в числе прочего: воздухопровод тормозной магистрали ТМ с концевыми кранами и соединительными рукавами с головками №369А (на фиг.1 не показаны); сообщенный с воздухопроводом тормозной магистрали ТМ воздухораспределитель ВР; воздухопроводы от воздухораспределителя ВР к тормозным цилиндрам ТЦ тележек и к запасному резервуару ЗР;
- связанный с воздухораспределителем ВР электровоздухораспределитель ЭВР;
- датчик торможения локомотива ДТЛ, устанавливаемый в воздухопровод от воздухораспределителя ВР к тормозным цилиндрам ТЦ тележек. Замыкающий контакт датчика торможения локомотива ДТЛ замыкается при наличии избыточного давления сжатого воздуха в указанном воздухопроводе свыше 0,02-0,04 МПа и шунтирует электрическую цепь контрольного (№2) и рабочего (№1) проводов локомотива;
- объединенный с блоком питания блок управления БУ/БП-ЭПТМ, устанавливаемый на штатную амортизационную панель БУ-ЭПТ-П №579-00-20 (на фиг.1 не показана).
В состав вагонных элементов входят:
- штатные компоненты автоматического пневматического тормоза вагона содержащие, в числе прочего, воздухопровод тормозной магистрали (на фиг.1 не показан) с концевыми кранами и соединительными рукавами с головками №369А. Воздухопровод тормозной магистрали сообщен отростками с воздухораспределителями (на фиг.1 не показаны), размещенными непосредственно на привалочных фланцах задних крышек тормозных цилиндров №501Б;
- связанные с воздухораспределителями электровоздухораспределители ЭВР, содержащие надлежащим образом включенные полупроводниковые диоды ВС и катушки электропневматических вентилей перекрыши 577 и торможения ВТ;
- двухтрубные и трехтрубные клеммные коробки, сообщенные между собой трубами, в которых проложены контрольные (№2) и рабочие (№1) провода, подсоединенные на соответствующие клеммы указанных коробок. От клемм, размещаемых по торцам вагонов двухтрубных клеммных коробок, проложены провода к соответствующим контактам головок №369А соединительных рукавов. В размещаемых около задних крышек тормозных цилиндров трехтрубных клеммных коробках имеются штатные клеммы, к которым присоединены отрезки рабочих проводов (№7), идущих в двухтрубные клеммные коробки и к электровоздухораспределителям ЭВР. Кроме того, в трехтрубных клеммных коробках устанавливают дополнительные болты-клеммы, на которые присоединяют концы разрезанных транзитом проходящих контрольных проводов (№2);
- датчики торможения вагонов ДТВ, устанавливаемые вместо пробок-заглушек привалочных фланцев тормозных цилиндров. Замыкающие контакты датчиков торможения вагонов ДТВ замыкаются при наличии избыточного давления сжатого воздуха в тормозных цилиндрах свыше 0,02-0,04 МПа и шунтируют электрические цепи контрольных (№2) и рабочих (№1) проводов вагонов. Провода от замыкающих контактов датчиков торможения вагонов ДТВ прокладывают и присоединяют к штатным клеммам и дополнительным болтам-клеммам трехтрубных клеммных коробок через боковые отростки устанавливаемых взамен муфт тройниковых фитингов и защитные трубы с рабочими проводами (№7) к электровоздухораспределителям ЭВР;
- содержащую полупроводниковый диод концевой заделки ВКЗ дополнительную головку концевой заделки ДГКЗ, устанавливаемую на головку свободного соединительного рукава хвостового вагона при формировании состава поезда. Полупроводниковый диод концевой заделки ВКЗ включается в проводящем направлении от контрольного (№2) к рабочему (№1) проводам.
На фиг.2 представлена упрощенная пневмоэлектрическая схема электропневматического тормоза с изменениями, которые обеспечивают реализацию предлагаемого способа его действия.
Штатные устройства автоматического пневматического тормоза, в числе прочего, содержат устанавливаемый на локомотиве кран машиниста КМ. С его помощью редуцированием избыточного давления питательной магистрали ПМ управляют нормируемыми изменениями давлений в тормозной магистрали ТМ, обеспечивающими соответствующую работу установленных на всех подвижных единицах воздухораспределителей ВР по наполнению-опорожнению тормозных цилиндров ТЦ, предопределяющему протекание тормозных процессов.
На воздухопроводе к тормозным цилиндрам ТЦ тележек (на локомотиве) или непосредственно в тормозном цилиндре ТЦ (на вагонах) установлены, соответственно, датчики торможения локомотива ДТЛ и вагонов ДTB. Их замыкающие контакты шунтируют на каждой подвижной единице электрические цепи контрольного №2 и рабочего №1 проводов, которые создаются при соединении рукавов тормозной магистрали через контакты головок их рукавов КГР. При этом головка свободного переднего соединительного рукава тормозной магистрали локомотива закрепляется на подвеске изолированной ПИ, в результате чего контакт головки рукава КГР контрольного провода №2 изолируется от контакта головки рукава КГР рабочего провода №1. Кроме того, на головке свободном рукаве хвостового вагона устанавливается дополнительная головка концевой заделки ДГКЗ. При этом через контакты головки рукава КГР электрическая цепь контрольного провода №2 сообщается с анодом полупроводникового диода концевой заделки ВКЗ ДГКЗ, а электрическая цепь рабочего провода№1 сообщается с его катодом. В результате электрические цепи контрольного №2 и рабочего №1 проводов связываются в поездную линию.
Стыкуемые на каждой подвижной единице состава поезда с воздухораспределителями ВР электровоздухораспределители ЭВР содержат надлежащим образом включенные и сообщенные с рабочим проводом №1 и использующимися в качестве обратного провода ходовыми рельсами: полупроводниковые диоды ВС и катушки электропневматических вентилей перекрыши ВП и торможения ВТ. Использующиеся в качестве обратного провода ходовые рельсы связаны с проводом локомотивного рельсового заземлителя РЗ и образуют силовую линию в паре с рабочим проводом №1.
Использующийся объединенный с блоком питания блок управления БУ/БП-ЭПТМ модернизированной схемы электропневматического тормоза устанавливается на штатную амортизационную панель с управляющими клеммами «З1», «Л1», «П» и «Т», управляемыми клеммами «+50», «-50», «З», «КЛ», «Л», «ЛП», «ЛС», «ЛТ» и заземляющей бонкой ЗБ.
На клеммы «З1» и «Л1» при включении выключателя В питание от аккумуляторной батареи АБ локомотива поступает к блоку питания, содержащему гальванически независимые между собой и от аккумуляторной батареи АБ контрольный КИТ и рабочий РИТ источники постоянного тока.
На клеммы «П» или «Т» избирательно поступают управляющие сигналы от контроллера крана машиниста ККМ при реализации, соответственно, режимов перекрыши и торможения. При отсутствии управляющих сигналов на клеммах «П» или «Т» реализуется поездной режим (режим зарядки и отпуска).
От клеммы «+50» осуществляется питание электрической цепи контроллера крана машиниста ККМ.
От клемм «ЛС», «ЛП», «ЛТ» и «-50» осуществляется питание электрических цепей ламп О, П и Т светового сигнализатора СС, соответствующая индикация которых позволяет идентифицировать реализуемый режим работы электропневматического тормоза:
- поездной режим индицируют горением лампы О;
- режимы перекрыш индицируют горением ламп О и П;
- режимы торможения индицируют горением ламп О и Т.
От клемм «КЛ» и «Л» в условиях наличия на вагонах элементов модернизированной схемы электропневматического тормоза работой блока управления, определяемой включением переключателя «ЭПТМ на составе» в положение «Да», осуществляется генерирование непрерывного чередования посылок в поездную линию импульсов прямой и обратной полярностей, питаемых контрольным источником тока КИТ.
От клемм «Л» и «З» работой блока управления осуществляется генерирование полярности питания силовой линии в соответствии с реализуемым режимом работы.
В поездном режиме (режиме зарядки-отпуска) - в силовую линию напряжение постоянного тока от рабочего источника тока РИТ не подается.
В режимах перекрыш - от рабочего источника тока РИТ подается традиционное напряжение постоянного тока плюсовой полярности в ходовые рельсы через клемму «З» и провод рельсового заземлителя РЗ, а через рабочий провод №1 к клемме «Л» протекает ток минусовой полярности к рабочему источнику тока РИТ. Одновременно от рабочего источника тока РИГ осуществляется подача на клемму «З» и заземляющую бонку ЗБ разности потенциалов аналогичной полярности.
В режимах торможений - от рабочего источника тока РИТ подается также традиционное напряжение постоянного тока плюсовой полярности в рабочий провод №1 через клемму «Л», а через рельсы провод рельсового заземлителя РЗ к клемме «З» протекает ток минусовой полярности к рабочему источнику тока РИТ. Одновременно от рабочего источника тока РИТ осуществляется подача на заземляющую бонку ЗБ и клемму «З» разности потенциалов такой же полярности.
При включении переключателя «ЭПТМ на составе» в положение «Нет» алгоритмом работы блока управления предусматривается генерирование в поездную линию импульсов только прямой полярности, питаемых контрольным источником тока КИТ. Одновременно в период посылки в поездную линию питаемых контрольным источником КИТ импульсов обратной полярности либо в паузах между ними (при нахождении переключателя «ЭПТМ на составе» в положение «Нет») осуществляется подача на клемму «З» и заземленную бонку ЗБ корпуса блока управления разности потенциалов рабочего источника тока РИТ с соответствующей режиму работы полярностью. В этих обстоятельствах обеспечивают возможность действия электропневматического тормоза в условиях отсутствия на вагонах элементов модернизированной схемы электропневматического тормоза.
Вновь вводимым специальным выключателем СВ с двумя замыкающими контактами обеспечивают создание (в ситуации электропневматического управления тормозами) либо прерывание (в ситуации необходимости перехода на пневматическое управление тормозами) электрических цепей питания контроллера крана машиниста ККМ и лампы О светового сигнализатора СС.
Сведения, подтверждающие возможность осуществления изобретения
Отмеченные изменения в модернизированной схеме электропневматического тормоза обеспечивают следующие особенности его действия.
При включенном выключателе В питание от аккумуляторной батареи АБ локомотива поступает к блоку питания (см. фиг.2).
В ситуации предстоящего электропневматического управления тормозами включением специального выключателя СВ обеспечивается создание электрических цепей питания контроллера крана машиниста ККМ и лампы О светового сигнализатора СС.
Режим зарядки-отпуска (поездное положение) в условиях электропневматического управления тормозами
В I и II положения ручки крана машиниста КМ осуществляется режим зарядки-отпуска автоматических пневматических тормозов подвижных единиц состава поезда, что, как известно, вызывает соответствующее повышение и последующее поддержание нормированного уровня избыточного давления тормозной магистрали ТМ. В результате воздухораспределители ВР осуществляют выпуск избыточного давления сжатого воздуха из тормозных цилиндров ТЦ и зарядку сжатым воздухом до упомянутого уровня запасных резервуаров (на фиг.2 не показаны), обеспечивая тем самым последующий поездной режим.
При этом замкнуты размыкающие контакты обоих микровыключателей «а» и «б» контроллера крана машиниста ККМ, и ни на одну из управляющих клемм амортизационной панели «П» и «Т» питание не поступает, что идентифицируется блоком управления как реализация поездного режима. В этих обстоятельствах (в условиях нахождения переключателя «ЭПТМ на составе» в положении «Да») алгоритмом работы блока управления реализуется:
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ;
- подача на клемму «З» и заземляющую бонку ЗБ разности потенциалов от рабочего источника тока РИТ.
Таким образом, обеспечивают идентификацию исправности: контрольного КИТ и рабочего РИТ источников тока, электрических цепей поездной линии и локомотивного рельсового заземлителя РЗ и отсутствие в составе поезда заторможенных подвижных единиц, что индицируется горением только лампы О светового сигнализатора СС, в противном случае имеют место мигания ламп О и Т.
Режим перекрыши перед торможением в условиях электропневматического управления тормозами
Режим перекрыши осуществляется постановкой ручки крана машиниста КM в положение III или IV (перекрыша без питания или с питанием тормозной магистрали ТМ), что в начальный момент не вызывает никаких изменений в работе автоматических пневматических тормозов подвижных единиц состава поезда.
При этом в контроллере крана машиниста ККМ происходит переключение размыкающего контакта микровыключателя «а» с замыканием его замыкающего контакта, и на управляющую клемму амортизационной панели «П» поступает питание, что идентифицируется блоком управления как реализация режима перекрыши перед торможением. В этих обстоятельствах алгоритмом работы блока управления реализуется:
- подача от рабочего источника тока РИТ в силовую линию традиционного питания ходовых рельсов напряжения постоянного тока плюсовой полярности через клемму «З» и провод локомотивного рельсового заземлителя РЗ;
- одновременно от рабочего источника тока РИТ осуществляется подача разности потенциалов аналогичной полярности на клемму «З» и заземляющую бонку ЗБ;
- продолжение непрерывного чередования посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ.
При такой полярности постоянного тока в рельсах и рабочем проводе №1 имеет место работа электровоздухораспределителей ЭВР в режиме перекрыши. Происходит традиционное возбуждение на локомотиве и каждом вагоне катушек электропневматических вентилей перекрыши ВП без возбуждения катушек электропневматических вентилей торможения ВТ (протеканию через них постоянного тока такой полярности препятствуют встречно включенные полупроводниковые диоды ВС).
Таким образом, обеспечивают идентификацию исправности: контрольного КИТ и рабочего РИТ источников тока, электрических цепей поездной линии и локомотивного рельсового заземлителя РЗ и отсутствие в составе поезда заторможенных подвижных единиц, что индицируется горением ламп О и П светового сигнализатора СС, в противном случае имеют место сопровождаемые горением лампы П мигания ламп О и Т.
Необходимо отметить следующее обстоятельство. Реализацией режима перекрыши перед торможением обеспечивают выявление ситуации пробоя полупроводникового диода ВС в электровоздухораспределителе ЭВР какой-либо подвижной единицы в составе поезда. Как известно, такая ситуация является аварийной, так как из-за возбуждения катушки электропневматического вентиля ВТ в таком электровоздухораспределителе ЭВР происходит неконтролируемое наполнение его тормозного цилиндра ТЦ избыточным давлением сжатого воздуха практически до уровня давления тормозной магистрали ТМ. В результате этого, как правило, имеет место заклинивание колесных пар подвижной единицы с образованием ползунов, что создает угрозу безопасности движения. В модернизированной схеме электропневматического тормоза такая ситуация немедленно идентифицируется возникающим миганием лампы Т, сопровождающим горение ламп О и П светового сигнализатора СС, и предопределяет незамедлительность перехода на пневматическое управление тормозами.
Режим торможения в условиях электропневматического управления тормозами Режим торможения осуществляют переводом ручки крана машиниста КМ в положения VЭ, V или VI, чем обеспечивают работу автоматических пневматических тормозов подвижных единиц состава поезда, соответственно, без разрядки тормозной магистрали ТМ, с разрядкой тормозной магистрали ТМ темпом служебного торможения или с разрядкой ТМ темпом экстренного торможения. В условиях электропневматического управления торможением, как правило, процесс торможения осуществляется постановкой ручки КМ в положение VЭ.
При этом в контроллере крана машиниста ККМ к замкнувшемуся замыкающему контакту микровыключателя «а» добавляется переключение размыкающего контакта микровыключателя «б» с замыканием его замыкающего контакта, и питание переключается с управляющей клеммы «П» на клемму «Т», что идентифицируется блоком управления как осуществление режима торможения. В этих обстоятельствах алгоритмом работы блока управления реализуется:
- подача от рабочего источника тока РИТ в силовую линию традиционного питания рабочего провода №1 напряжением постоянного тока плюсовой полярности через клемму «Л»;
- одновременно от рабочего источника тока РИТ осуществляется подача разности потенциалов аналогичной полярности на заземляющую бонку ЗБ и клемму «З»;
- продолжение непрерывного чередования посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ.
При такой полярности постоянного тока в рабочем проводе №1 и рельсах имеет место работа электровоздухораспределителей ЭВР в режиме торможения. Происходит традиционное возбуждение на локомотиве и каждом вагоне катушек электропневматических вентилей перекрыши ВП и торможения ВТ (протеканию через них постоянного тока такой полярности согласно включенный полупроводниковый диод ВС не препятствует).
Таким образом, в начальный момент имеет место идентификация исправности: контрольного КИТ и рабочего РИТ источников тока, электрических цепей поездной линии и локомотивного рельсового заземлителя РЗ и отсутствие в составе поезда заторможенных подвижных единиц, что индицируется горением ламп О и Т светового сигнализатора СС, в противном случае имеют место сопровождаемые горением лампы Т мигание лампы О.
В дальнейшем в результате работы электровоздухораспределителей ЭВР (от не показанных на фиг.2 запасных резервуаров через переключательные клапаны) осуществляется наполнение тормозных цилиндров ТЦ избыточным давлением сжатого воздуха, что приводит к замыканию замыкающих контактов датчиков торможения локомотива ДТЛ и вагонов ДТВ. Это вызывает шунтирование ими электрической цепи поездной линии на локомотиве и каждом вагоне.
Режим перекрыши в процессе торможения в условиях электропневматического управления тормозами
Достижение требуемой по условиям ведения поезда величины тормозной силы контролируется по показаниям манометра тормозных цилиндров ТЦ локомотива. Для прекращения дальнейшего ее повышения ручка крана машиниста КM возвращается в положение перекрыш (без питания - III или с питанием - IV тормозной магистрали). Этим традиционно обеспечивается сохранение и автоматическое поддержание в тормозных цилиндрах ТЦ (при наличии в них неплотностей) созданного в режиме торможения уровня избыточного давления сжатого воздуха.
При этом в контроллере крана машиниста ККМ остается замкнутым только замыкающий контакт микровыключателя «а», т.к. замыкающий контакт микровыключателя «б» размыкается с одновременным замыканием его размыкающего контакта. Поэтому питание переключается с управляющей клеммы «Т» на клемму «П», что идентифицируется блоком управления как осуществление режима перекрыши в процессе торможения. В этих обстоятельствах алгоритмом работы блока управления реализуется:
- подача от рабочего источника тока РИТ в силовую линию традиционного питания ходовых рельсов напряжением постоянного тока плюсовой полярности через клемму «З» и провод локомотивного рельсового заземлителя РЗ;
- одновременно от рабочего источника тока РИГ осуществляется подача разности потенциалов аналогичной полярности на клемму «З» и заземляющую бонку ЗБ;
- продолжение непрерывного чередования посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ.
При такой полярности постоянного тока в рельсах и рабочем проводе №1 имеет место работа электровоздухораспределителей ЭВР в режиме перекрыши. Остаются традиционно возбужденными на локомотиве и каждом вагоне только катушки электропневматических вентилей перекрыши ВП, а возбуждение катушек вентилей торможения ВТ прекращается (протеканию через них постоянного тока такой полярности, как уже отмечалось, препятствуют встречно включенные полупроводниковые диоды ВС).
Таким образом, имеет место идентификация исправности: контрольного КИТ и рабочего РИТ источников тока, электрической цепи локомотивного рельсового заземлителя РЗ и наличие в составе поезда заторможенных подвижных единиц, что индицируется миганием лампы Т, сопровождаемой горением ламп О и П светового сигнализатора СС.
Режим отпуска после торможения в условиях электропневматического управления тормозами
Возвращение ручки крана машиниста КM в I или II положения вызывает соответствующее повышение и последующее поддержание нормированного уровня избыточного давления тормозной магистрали ТМ. В результате воздухораспределители ВР осуществляют подзарядку сжатым воздухом до упомянутого уровня запасных резервуаров (на фиг.2 не показаны), обеспечивая тем самым последующий поездной режим.
При этом происходит замыкание размыкающих контактов обоих микровыключателей «а» и «б» контроллера крана машиниста ККМ, и ни на одну из управляющих клемм амортизационной панели «П» и «Т» питание не поступает, что идентифицируется блоком управления как осуществление режима отпуска. В этих обстоятельствах алгоритмом работы блока управления реализуется:
- прекращение подачи от рабочего источника тока PИT питания в силовую линию, что вызывает прекращение возбуждения катушек электропневматических вентилей перекрыши ВП в электровоздухораспределителях ЭВР всех подвижных единиц состава поезда;
- сохранение подачи разности потенциалов рабочего источника тока РИТ на клемму «З» и заземляющую бонку ЗБ;
- в свою очередь, прекращение возбуждения катушек электропневматических вентилей перекрыши ВП вызывает выпуск в атмосферу избыточного давления сжатого воздуха из рабочих камер (на фиг.2 не показаны) и, соответственно, из тормозных цилиндров ТЦ подвижных единиц состава поезда;
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ.
Таким образом, имеет место идентификация исправности: контрольного КИТ и рабочего РИТ источников тока, электрической цепи локомотивного рельсового заземлителя РЗ и наличия в составе поезда заторможенных подвижных единиц. Это индицируется сопровождаемым миганием лампы Т горением лампы О светового сигнализатора СС. Мигание лампы Т светового сигнализатора СС прекращается после полного расторможения подвижных единиц - размыкания замыкающих контактов датчиков торможения локомотива ДТЛ и вагонов ДТВ. В итоге имеет место горение только лампы О светового сигнализатора СС.
Достоинства рассмотренной схемы электропневматического тормоза, реализующей предложенный способ ее действия
В ситуации предстоящего пневматического управления тормозами отключением специального выключателя СВ обеспечивается прерывание электрических цепей питания контроллера крана машиниста ККМ и лампы О светового сигнализатора СС.
Прерывание электрической цепи питания лампы О светового сигнализатора СС исключает в дальнейшем ложного восприятия пневматического управления тормозами как электропневматического управления ими. При этом остающимся включенным выключателем В сохраняется поступление питания от аккумуляторной батареи АБ локомотива к блоку питания и, следовательно, сохранение возможности работы блока управления.
Постоянное же отсутствие питания микровыключателей контроллера крана машиниста ККМ исключает и возможность появления питания на какой-либо из управляющих клемм амортизационной панели «П» и «Т», что идентифицируется блоком управления как постоянное осуществление поездного режима.
Режим зарядки-отпуска (поездное положение) в условиях
пневматического управления тормозами
Аналогично рассмотренному в I и II положения ручки крана машиниста КМ осуществляется режим зарядки-отпуска автоматических пневматических тормозов подвижных единиц состава поезда с соответствующими последствиями.
В этих обстоятельствах алгоритмом работы блока управления реализуется:
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярносгей от контрольного источника тока КИТ,
- подача на клемму «З» и заземляющую бонку ЗБ разности потенциалов от рабочего источника тока РИТ;
- идентификация отсутствия в составе поезда заторможенных подвижных единиц, что индицируется не горящими лампами светового сигнализатора СС, в противном случае имеет место мигание лампы Т.
Режим перекрыши перед торможением в условиях пневматического управления тормозами
Также аналогично рассмотренному режим перекрыши осуществляемый постановкой ручки крана машиниста КМ в положение III или IV (перекрыша без питания или с питанием тормозной магистрали), не вызывает никаких изменений в работе автоматических пневматических тормозов подвижных единиц состава поезда.
В этих обстоятельствах алгоритмом работы блока управления реализуется:
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ,
- подача на клемму «З» и заземляющую бонку ЗБ разности потенциалов от рабочего источника тока РИТ,
- идентификация отсутствия в составе поезда заторможенных подвижных единиц, что индицируется не горящими лампами светового сигнализатора СС, в противном случае имеет место мигание лампы Т.
Режим торможения в условиях пневматического управления тормозами
Режим торможение осуществляют переводом ручки крана машиниста КМ в положения V или VI, что обеспечивает работу автоматических пневматических тормозов подвижных единиц состава поезда, соответственно, с разрядкой тормозной магистрали ТМ темпом служебного торможения или с разрядкой ТМ темпом экстренного торможения.
В этих обстоятельствах алгоритмом работы блока управления реализуется:
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ,
- подача на клемму «З» и заземляющую бонку ЗБ разности потенциалов от рабочего источника тока РИТ.
В дальнейшем в результате наполнения тормозных цилиндров ТЦ избыточным давлением сжатого воздуха работой воздухораспределителей ВР (от не показанных на фиг.2 запасных резервуаров через переключательные клапаны) происходит замыкание замыкающих контактов датчиков торможения локомотива ДТЛ и вагонов ДТВ. Это вызывает шунтирование ими электрической цепи поездной линии на локомотиве и каждом вагоне, что идентифицируется как наличие в составе поезда заторможенных подвижных единиц и индицируется миганием лампы Т светового сигнализатора СС.
Режим перекрыши в процессе торможения в условиях пневматического управления тормозами
Достижение требуемой по условиям ведения поезда величины тормозной силы оценивается опытностью машиниста. Для прекращения дальнейшего ее повышения ручка крана машиниста AM возвращается в положение перекрыш (без питания - III или с питанием - IV тормозной магистрали). Этим традиционно обеспечивается сохранение и автоматическое поддержание в тормозных цилиндрах ТЦ (при наличии в них неплотностей) созданного в режиме торможения избыточного давления сжатого воздуха.
В этих обстоятельствах алгоритмом работы блока управления реализуется:
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ,
- подача на клемму «З» и заземляющую бонку ЗБ разности потенциалов от рабочего источника тока РИТ,
- идентификация наличия в составе поезда заторможенных подвижных единиц, что индицируется миганием лампы Т светового сигнализатора СС.
Режим отпуска после торможения в условиях пневматического управления тормозами
Возвращение ручки крана машиниста КM в I или II положения вызывает соответствующее повышение и последующее поддержание нормированного уровня избыточного давления тормозной магистрали ТМ. В результате воздухораспределители ВР осуществляют подзарядку сжатым воздухом до упомянутого уровня запасных резервуаров (на фиг.2 не показаны), обеспечивая тем самым последующий поездной режим.
В этих обстоятельствах алгоритмом работы блока управления реализуется:
- непрерывное чередование посылок в поездную линию импульсов прямой и обратной полярностей от контрольного источника тока КИТ;
- сохранение подачи разности потенциалов рабочего источника тока РИТ на клемму «З» и заземляющую бонку ЗБ;
- идентификация наличия в составе поезда заторможенных подвижных единиц, что индицируется продолжающимся миганием лампы Т светового сигнализатора СС. Мигание лампы Т светового сигнализатора СС прекращается после полного расторможения подвижных единиц - размыкания замыкающих контактов датчиков торможения локомотива ДТЛ и вагонов ДТВ.
Технические результаты, получаемые при использование предлагаемого способа действия электропневматического тормоза
Помимо сохранения всех достоинств прототипа, обеспечивающего в ситуации электропневматического управления тормозами, в числе прочего:
- осуществление непрерывной световой индикации о наличии в составе поезда заторможенных вагонов, что, в свою очередь, позволяет осуществлять контроль момента разрыва тормозной магистрали ТМ, перекрытия ее концевых кранов, отпуска тормозных цилиндров ТЦ после осуществления торможения и выявлять ситуацию пробоя полупроводниковых диодов ВС в электровоздухораспределителях ЭВР;
- автоматическое при торможениях дублированное питание поездной линии, что, в свою очередь, обеспечивает возможность контроля ее исправности и повышенную надежность действия электровоздухораспределителей ЭВР при повреждениях в нескольких ее узлах;
- усиление охраны труда, в принципе исключающее опасность электротравмирования обслуживающего персонала переменным током повышенной частоты;
- этапности внедрения модернизированной схемы электропневматического тормоза;
дополнительно обеспечивает в ситуации пневматического управления тормозами осуществление непрерывной световой индикации о наличии в составе поезда заторможенных вагонов.
Возможности идентификации протекания тормозных процессов по информационной значимости индикации ламп светового сигнализатора СС представлены в таблице.
Идентификация протекания тормозных процессов по информационной значимости индикации ламп светового сигнализатора
ческое управление тормозами (специальный выключатель СВ включен)
Возможность осуществления изобретения
Возможность осуществления предложенного способа действия электропневматического тормоза достигается установкой на пульте управления кабины машиниста специального выключателя СВ с двумя замыкающими электрическими контактами, один из которых врезается в электрическую цепь питания контроллера крана машиниста ККМ, а второй - в электрическую цепь питания лампы О светового сигнализатора СС.
Источники информации
1. Иноземцев В.Г., Казаринов В.М., Ясенцев В.Ф. Автоматические тормоза. Учебник для вузов ж-д, транспорта. - М.: Транспорт, 1981.
2. Электропневматический тормоз железнодорожных подвижных единиц. Патент РФ №2243913, МКИ В60Т 17/22, 7/12. Бюл. №1, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА | 2010 |
|
RU2428334C1 |
| СПОСОБ ДЕЙСТВИЯ БЛОКА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2009 |
|
RU2392139C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ ЕДИНИЦ | 2002 |
|
RU2243913C2 |
| СПОСОБ ДЕЙСТВИЯ ЭЛЕКТРОВОЗДУХОРАСПРЕДЕЛИТЕЛЯ | 2011 |
|
RU2452640C1 |
| Устройство для управления электропневматическим тормозом | 1984 |
|
SU1232533A1 |
| УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ТОРМОЗОВ ПОЕЗДА | 2005 |
|
RU2298496C2 |
| Электропневматический тормоз железнодорожного транспортного средства | 1978 |
|
SU765063A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749620C1 |
| СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2012 |
|
RU2509015C1 |
Изобретение относится к области железнодорожного транспорта и может быть использовано в устройствах электропневматических тормозов пассажирских поездов с локомотивной тягой. В число приборов управления электропневматическим тормозом вводят специальный выключатель. Электропневматический тормоз содержит помимо дополняющих штатные устройства автоматического пневматического тормоза типовых элементов модернизированный блок управления с блоком питания. Контрольный и рабочий источники постоянного тока блока питания гальванически независимы между собой и от аккумуляторной батареи локомотива. Подвижные единицы оборудованы датчиками торможения и дополнительной головкой концевой заделки с встроенным полупроводниковым диодом. Алгоритмом работы блока управления осуществляют нормированные режимы работы электровоздухораспределителей и обеспечивают непрерывное чередование посылок в цепь поездной линии импульсов постоянного тока прямой и обратной полярностей от контрольного источника тока. Этим достигают возможности идентификации как исправности поездной линии, так и наличия в составе поезда заторможенных подвижных единиц. С помощью упомянутого специального выключателя обеспечивают прерывание электрических цепей питания контроллера крана машиниста и соответствующей лампы светового сигнализатора. В результате в условиях пневматического управления тормозами достигают возможности сохранения идентификации наличия в составе поезда заторможенных подвижных единиц. Технический результат заключается в достижении возможности контроля протекания тормозных процессов в составе пассажирского поезда с локомотивной тягой поезда в условиях как электропневматического, так и пневматического управления тормозами. 2 ил. 1 табл.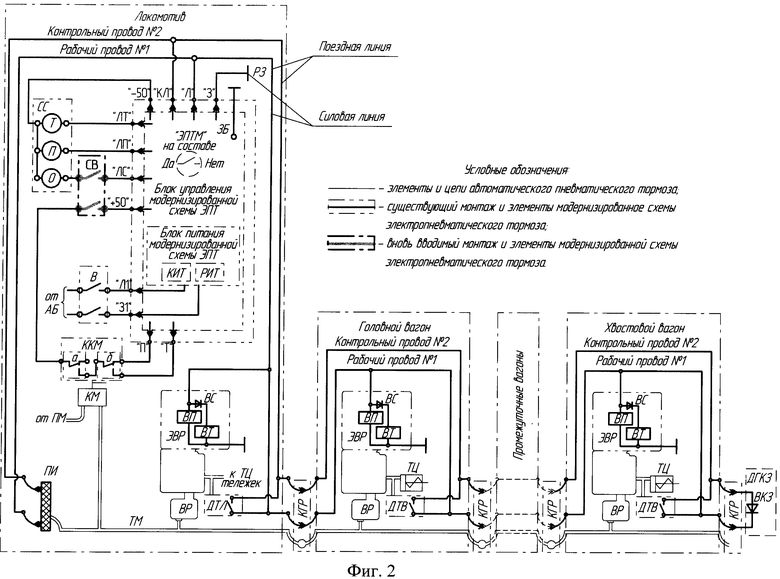
Способ действия электропневматического тормоза, содержащего дополняющие штатные устройства автоматического пневматического тормоза подвижных единиц состава поезда элементы электрической цепи, электровоздухораспределители и приборы управления, причем элементы электрической цепи содержат линейные провода, датчики торможения подвижных единиц и дополнительную головку концевой заделки, при этом линейные провода, включающие в себя рабочий и контрольный провода, объединяют через специальные контакты, размещаемые в головках соединительных рукавов тормозной магистрали, в единую поездную линию, которую шунтируют замыкающими контактами датчиков торможения на каждой подвижной единице, а на хвостовом вагоне связывают через включенный в проводящем направлении полупроводниковый диод дополнительной головки концевой заделки, в свою очередь электровоздухораспределители подключают к электрической силовой линии, состоящей из рабочего провода и используемых в качестве обратного провода ходовых рельсов, связь с которыми осуществляют с помощью провода локомотивного рельсового заземлителя, одновременно приборы управления содержат выключатель блока питания с гальванически независимыми между собой и от аккумуляторной батареи локомотива контрольным и рабочим источниками постоянного тока, от которых осуществляют питание блока управления, взаимодействием которого с контроллером крана машиниста отслеживают перемещения ручки последнего, чем обусловливают идентифицируемые по индикации ламп светового сигнализатора нормируемые режимы работы, предопределяемые надлежащим электропитанием электрической силовой линии, при этом в условиях наличия на вагонах упомянутых датчиков торможения включением должного выключателя алгоритмом работы блока управления обеспечивают осуществление непрерывного чередования посылок в цепь поездной линии импульсов прямой и обратной полярностей от изолированного от ходовых рельсов контрольного источника тока, причем прохождение импульса прямой полярности, направление протекания которого совпадает с проводимостью полупроводникового диода дополнительной концевой заделки, идентифицируют как свидетельство целости электрической цепи поездной линии, что индицируют горением соответствующей лампы светового сигнализатора, а ее миганием индицируют непрохождение импульса прямой полярности и идентифицируют как свидетельство нарушения целости электрической цепи поездной линии, в свою очередь, прохождением импульса обратной полярности, направление протекания которого встречно проводимости полупроводникового диода дополнительной концевой заделки, идентифицируют наличие замкнутого состояния замыкающего контакта хотя бы одного из упомянутых датчиков торможения подвижной единицы и, следовательно, как свидетельство ее заторможенного состояния, что индицируют миганием надлежащей лампы светового сигнализатора, при этом синхронно с посылкой импульса обратной полярности в цепь поездной линии осуществляют также подачу на провод локомотивного рельсового заземлителя и заземленную бонку корпуса блока управления напряжения от рабочего источника тока с полярностью, соответствующей реализуемому блоком управления режиму работы, причем прохождение тока между указанными проводом и заземленной бонкой идентифицируют как исправность электрической цепи провода локомотивного рельсового заземлителя и индицируют горением упомянутой соответствующей лампы светового сигнализатора, а в противном случае идентифицируют неисправность электрической цепи провода локомотивного рельсового заземлителя и индицируют миганием упомянутой соответствующей лампы светового сигнализатора, отличающийся тем, что в число приборов управления вводят специальный выключатель, с помощью которого при необходимости перехода на пневматическое управление тормозами обеспечивают прерывание электрических цепей питания контроллера крана машиниста и соответствующей лампы светового сигнализатора, предназначенной для индикации в условиях электропневматического управления тормозами исправного состояния электрических цепей поездной линии и провода локомотивного рельсового заземлителя.
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ ЕДИНИЦ | 2002 |
|
RU2243913C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ ТОРМОЗОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2089418C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 1995 |
|
RU2089419C1 |
| US 4066299 A, 03.01.1984 | |||
| ИНОЗЕМЦЕВ В.Г | |||
| и др | |||
| Автоматические тормоза | |||
| Учебник для вузов ж.-д | |||
| транспорта | |||
| - М.: Транспорт, 1981, с.228-245. | |||

