Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится к ручному привдному инструменту, который выполняет заданное действие над обрабатываемой деталью, а более конкретно, к улучшенной технологии рукоятки.
Описание предшествующего уровня техники
Нерассмотренная выложенная публикация патента Японии №2002-254341 описывает ручной приводной инструмент, в котором сменная рабочая насадка приводится в действие с помощью электрического двигателя. Известный приводной инструмент содержит корпус, сменную рабочую насадку, смонтированную на конечном участке корпуса, электрический двигатель, размещенный внутри корпуса для того чтобы приводить в действие сменную рабочую насадку, и рукоятку, которая простирается от ее соединительного узла со стороны корпуса до ее дальнего края в направлении, поперечном к аксиальному направлению сменной рабочей насадки.
При работе приводного инструмента для того чтобы выполнять действие над обрабатываемой деталью с помощью сменной рабочей насадки во время удерживания рукоятки, для облегчения захватывания рукоятки, желательно уменьшение утомляемости пользователя, удерживающего рукоятку. В частности, если захват легко проскальзывает, обязательно требуется большая сила захвата, и это увеличивает нагрузку на пользователя.
Сущность изобретения
Соответственно, целью настоящего изобретения является создание технологии для улучшения характеристик захватывания ручного приводного инструмента.
Описанная выше проблема может решаться с помощью показательного варианта осуществления в соответствии с настоящим изобретением. Показательный приводной инструмент, для выполнения заданного действия с помощью приведения в действие сменной рабочей насадки, содержит корпус инструмента и рукоятку, сформированную на корпусе инструмента. Показательный приводной инструмент в соответствии с настоящим изобретением может широко охватывать различные типы приводных инструментов, таких как приводные устройства для забивания гвоздей или скоб, электрический рубанок для обработки поверхности обрабатываемой детали, ударная дрель для сверления или дробления обрабатываемой детали и фасонная фреза для снятия фасок или вырезания обрабатываемой детали.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, рукоятка имеет множество ребер, сформированных параллельно на внешней поверхности захвата, чтобы они выступали из внешней поверхности захвата. Каждое ребро простирается на внешней поверхности захвата в продольном направлении рукоятки. Каждое ребро имеет форму рифления, которое может зацепляться с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальца руки пользователя, удерживающей рукоятку в одном из направлений вдоль окружности рукоятки. С другой стороны, форма рифления не позволяет ребру зацепляться в другом направлении из направлений вдоль окружности рукоятки, с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальцев руки пользователя, удерживающей рукоятку. Одно направление здесь может предпочтительно являться направлением к основаниям от кончиков пальцев третьего-пятого пальцев, при этом другое направление может предпочтительно являться направлением к кончикам пальцев от оснований третьего-пятого пальцев.
Важно, чтобы рукоятка имела характеристики легкости захватывания и сопротивления скольжению при захвате. Относительно способа удерживания рукоятки с помощью пальцев, подушечки пальцев контактируют с внешней поверхностью захвата последовательно от стороны основания до стороны кончика пальца. В связи с этим, в соответствии с настоящим изобретением, каждое из ребер формируется таким образом, чтобы не допускать зацепления или усложнять зацепление с подушечками кончиков пальцев в другом направлении из направлений вдоль окружности рукоятки. При этой конфигурации, пользователь может держать рукоятку без сопротивления на подушечках кончиков пальцев, для облегчения захвата. С другой стороны, по направлению к основаниям от кончиков пальцев, удерживающих захват пальцев, ребро формируется так, чтобы оно зацеплялось с подушечками кончиков пальцев. При этой конфигурации, ребро может служить как препятствие для скольжения таким образом, что сила захвата может быть улучшена. В результате, во время работы, пользователь имеет возможность для удерживания рукоятки без усилий, так что утомляемость пользователя может быть уменьшена.
В другом варианте осуществления приводного инструмента в соответствии с настоящим изобретением, каждое из ребер имеет поперечное сечение треугольной формы, при этом стороны треугольного сечения сформированы с помощью наклонных поверхностей, располагающихся от внешней поверхности захвата до вершины, а одна из наклонных поверхностей выполнена короче, чем другая наклонная поверхность. Наклонные поверхности не обязательно должны быть плоскими, но они могут быть и изогнутыми.
В соответствии с настоящим изобретением, с помощью создания ребер, имеющих указанную форму поперечного сечения, сконструированных как описано выше, каждое ребро может иметь форму рифления, которая может зацепляться в одном направлении, но никогда не зацепляться или с трудом зацепляться в другом направлении с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальцев, из пальцев, удерживающих захват.
В другом варианте осуществления приводного инструмента в соответствии с настоящим изобретением, когда продольное направление корпуса инструмента устанавливается в горизонтальном положении, центр тяжести приводного инструмента располагается выше и впереди рукоятки в направлении, в котором простирается указательный палец при отгибе его из положения удерживания захвата. Приводной инструмент, имеющий подобную конструкцию, может включать в себя приводное устройство для забивания гвоздей или скоб и ударную дрель для сверления или дробления обрабатываемой детали. Кроме того, рукоятка, предпочтительно, располагается в направлении, поперечном к продольному направлению корпуса инструмента так, чтобы она имела конечные участки в продольном направлении, при этом для создания препятствия для скольжения в области задней поверхности конечных участков, рукоятка выполнена с возможностью удерживания в контакте с подушечкой мизинца руки пользователя рукоятки. Для создания препятствия для скольжения и обеспечения контакта рукоятки с подушечкой мизинца руки пользователя рукоятка имеет длину вдоль окружности конечного участка, содержащего область задней поверхности, большую, чем у центрального участка, расположенного внутри конечного участка. Другими словами, препятствие формируется с помощью создания у конечного участка захвата диаметра, большего, чем у его центрального участка, или с помощью формирования выпуклости в области задней поверхности.
В случае приводного инструмента, центр тяжести которого располагается выше и спереди рукоятки, если смотреть со стороны рукоятки сменного рабочего инструмента, когда продольное направление корпуса инструмента находится в горизонтальном положении, на приводной инструмент во время работы может действовать момент в таком направлении, что он поворачивает переднюю часть (сторону сменной рабочей насадки) приводного инструмента сверху вниз вокруг рукоятки. В результате, к подушечке мизинца, из пальцев, удерживающих захват, который удерживается в контакте с областью задней поверхности рукоятки, прилагается сила в таком направлении, что она толкает его назад. В соответствии с настоящим изобретением, с помощью создания препятствия для скольжения в области задней поверхности, который удерживается в контакте с подушечкой мизинца, из пальцев, удерживающих захват, скольжение подушечки мизинца по внешней поверхности захвата затрудняется, так что палец может надежно удерживать приводной инструмент.
В другом варианте осуществления приводного инструмента в соответствии с настоящим изобретением, рукоятка простирается в направлении, поперечном к продольному направлению корпуса инструмента, и имеет конечные участки в продольном направлении, при этом на одном из конечных участков, соответствующем большому пальцу руки пользователя, создана рабочая точка для пальца, предназначенная для размещения подушечки большого пальца, при этом выемки для пальцев формируют с помощью углублений на внешней поверхности захвата. В этой конфигурации, скольжение большого пальца затрудняется, так что характеристики захватывания могут быть улучшены.
Предпочтительно, рабочая точка для большого пальца располагается, по меньшей мере, частично, на выступающих частях ребер.
Предпочтительно, рукоятка имеет вытянутую форму и выполнена с непрерывно выступающими ребрами.
Предпочтительно, рукоятка имеет Т-образную форму, при этом рукоятка снабжена прокладкой Т-образной формы, по обеим сторонам которой расположены ребра.
Другие цели, признаки и преимущества настоящего изобретения будет легко понять после прочтения следующего далее детального описания вместе с прилагаемыми чертежами и формулой изобретения.
Краткое описание чертежей
Фиг.1 представляет собой общий вид, показывающий полную структуру гвоздезабивного пистолета 100 в соответствии с первым вариантом осуществления настоящего изобретения.
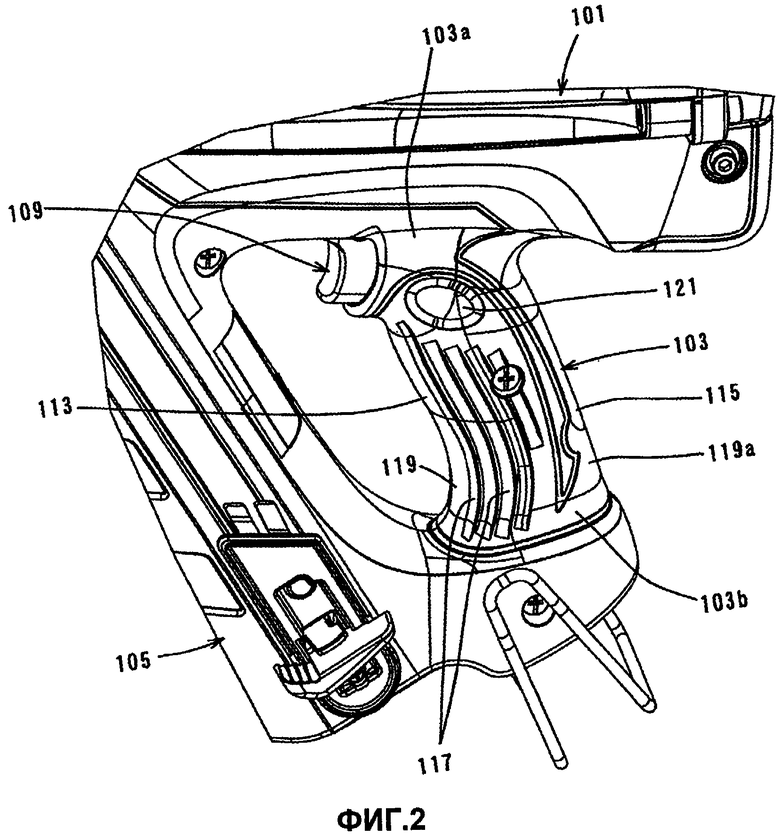
Фиг.2 представляет собой общий внешний вид, показывающий рукоятку 103.
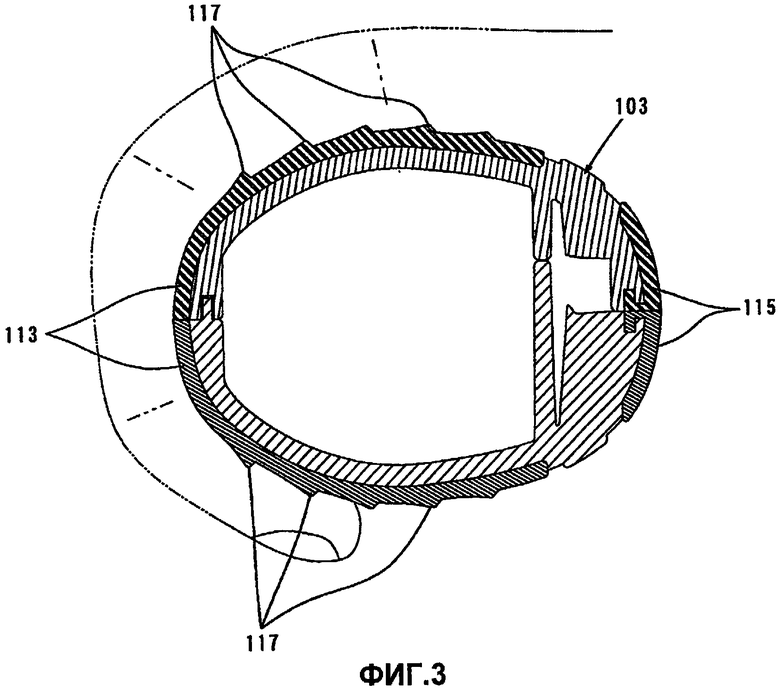
Фиг.3 представляет собой вид в разрезе, показывающий форму поперечного сечения рукоятки 103.
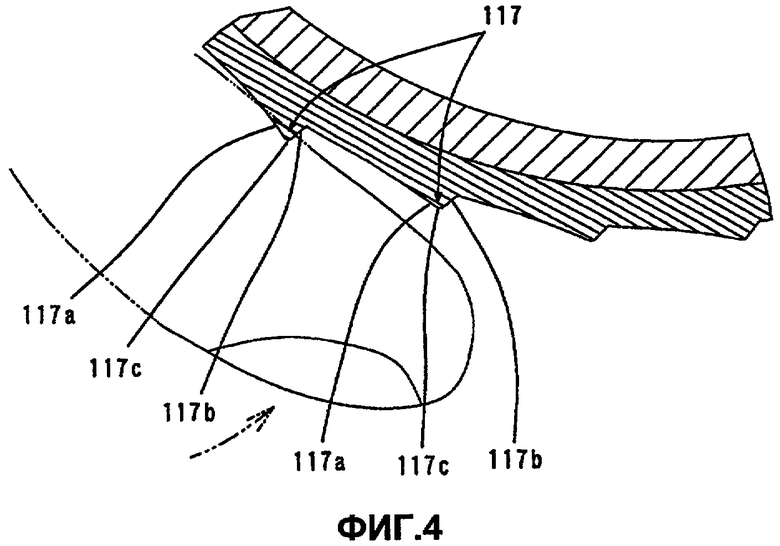
Фиг.4 представляет собой вид в разрезе, показывающий форму поперечного сечения ребер 117, сформированных на рукоятке 103.
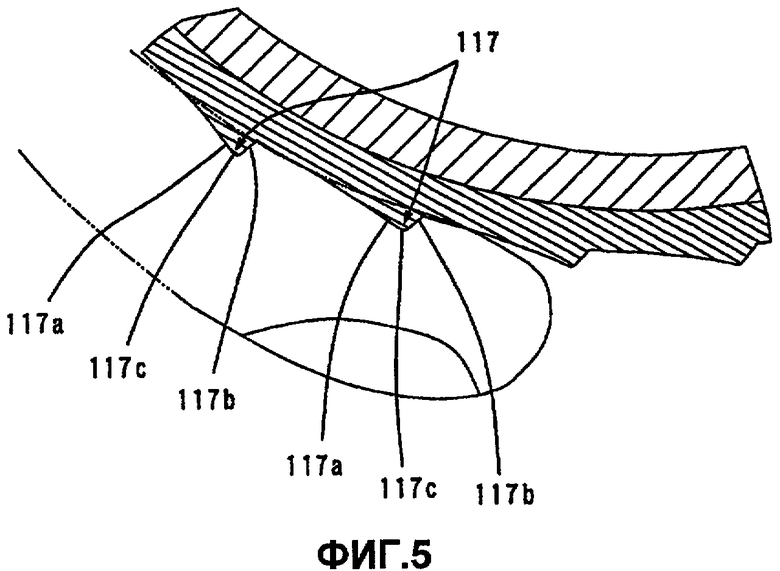
Фиг.5 представляет собой вид в разрезе, показывающий форму поперечного сечения ребер 117, сформированных на рукоятке 103.
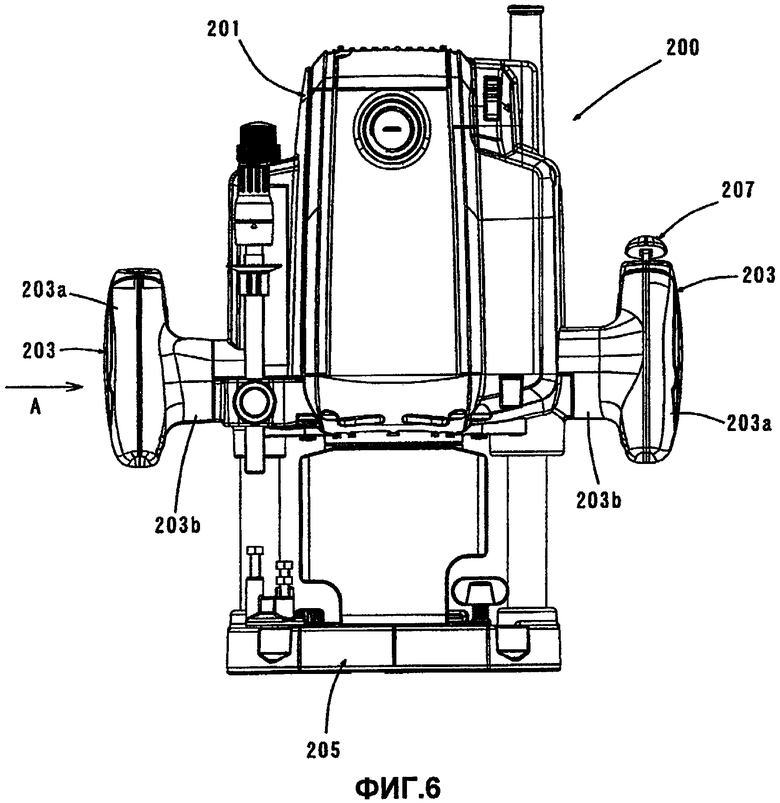
Фиг.6 представляет собой вид спереди, показывающий полную структуру электрической ручной фрезеровальной машины 2 00 в соответствии со вторым вариантом осуществления настоящего изобретения.
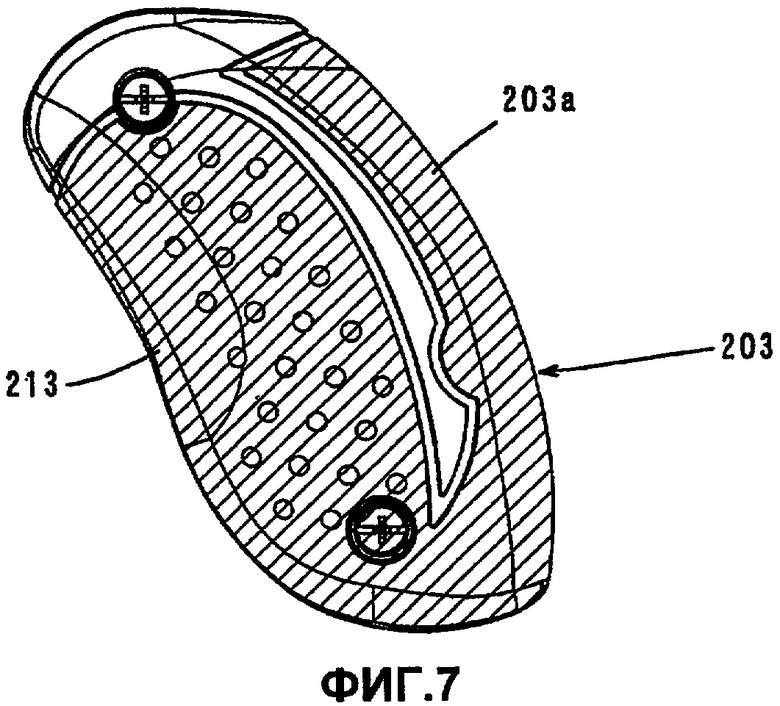
Фиг.7 представляет собой вид спереди рукоятки 203, если смотреть из направления указателя A на фиг.6.
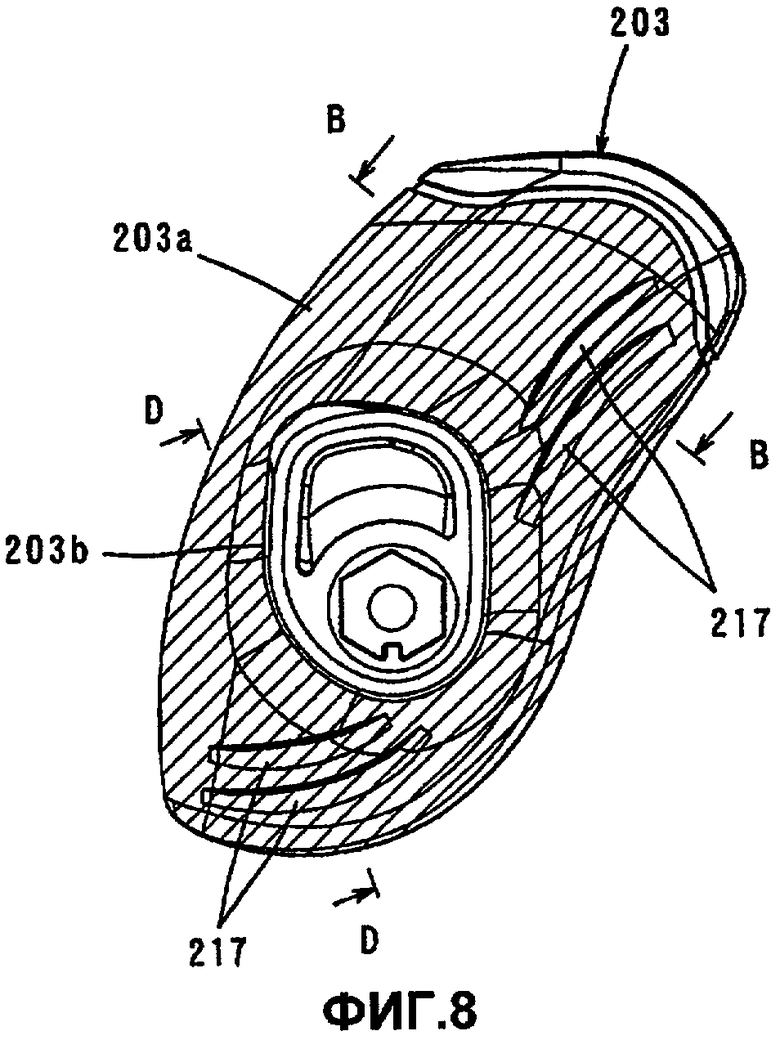
Фиг.8 представляет собой вид сзади рукоятки 203, если смотреть из направления, противоположного направлению указателя А на фиг.6.
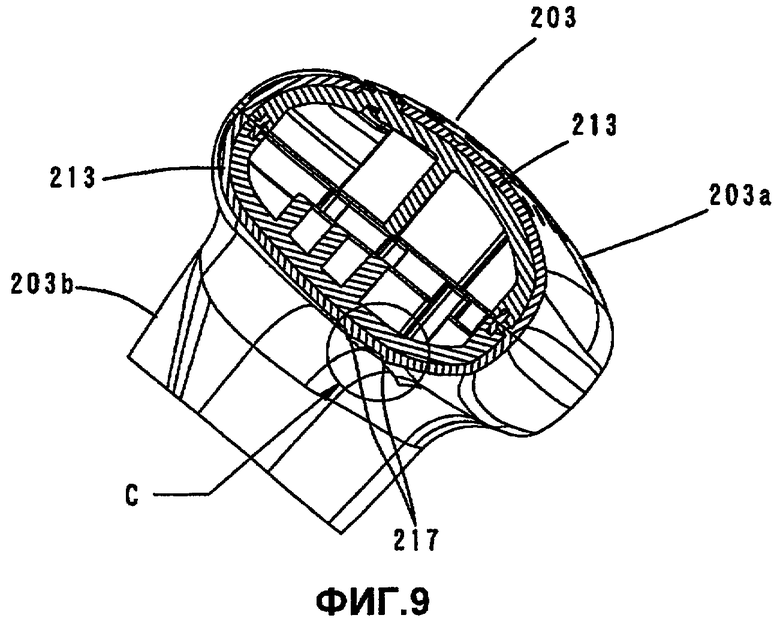
Фиг.9 представляет собой вид в разрезе вдоль линии B-B на Фиг.8.
Фиг.10 представляет собой увеличенный вид части C на фиг.9. Фиг.11 представляет собой вид в разрезе вдоль линии D-D на фиг.8.
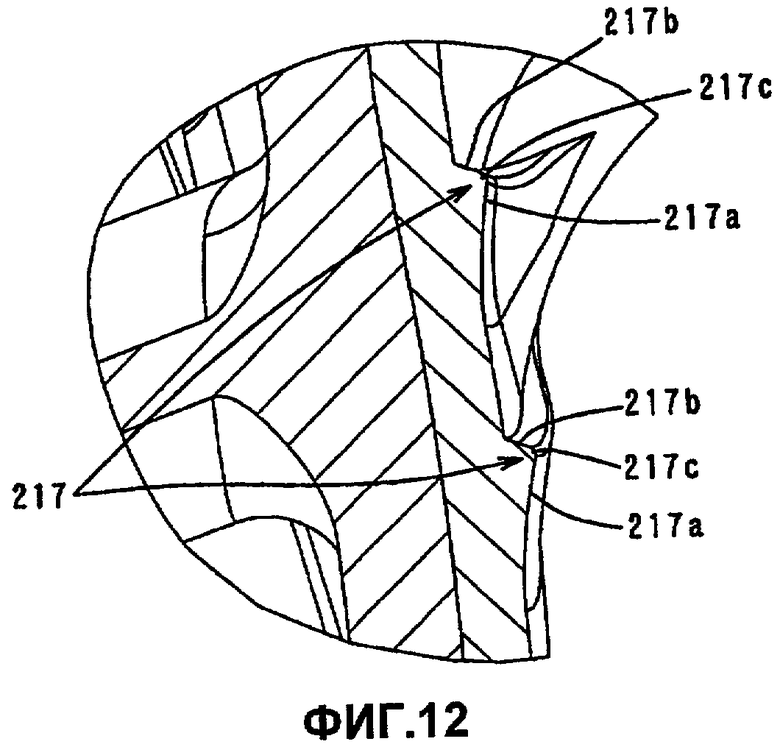
Фиг.12 представляет собой увеличенный вид части E на фиг.11.
Подробное описание изобретения
Каждый из дополнительных признаков и стадий способа, описанных выше и ниже, может использоваться отдельно или совместно с другими признаками и стадиями способа для создания и изготовления усовершенствованных приводных инструментов и способов использования таких приводных инструментов и устройств, которые используются здесь. Показательные примеры настоящего изобретения представляют собой примеры, которые используют многие из этих дополнительных признаков и стадий способа в сочетаниях, будут описаны теперь подробно со ссылками на чертежи. Это подробное описание предназначено только для того чтобы ознакомить специалистов в данной области с дальнейшими подробностями применения предпочтительных аспектов представленных концепций и не предназначено для того, чтобы ограничивать рамки настоящего изобретения. Только пункты формулы изобретения определяют рамки заявленного изобретения. По этой причине, сочетания признаков и стадий, описанных в последующем подробном описании, не обязательно могут соответствовать осуществлению изобретения в самом широком смысле, и вместо этого, они рассматриваются только как конкретно описывающие некоторые показательные принципы изобретения, подробное описание которого будет приводиться со ссылками на прилагаемые чертежи.
(Первый вариант осуществления)
Первый вариант осуществления настоящего изобретения описывается теперь со ссылками на прилагаемые чертежи. Первый вариант осуществления относится к газовому гвоздезабивному пистолету на внутреннем сгорании как показательному примеру приводного инструмента в соответствии с настоящим изобретением. Фиг.1 представляет собой общий вид, показывающий полную конструкцию гвоздезабивного пистолета 100 в соответствии с этим вариантом осуществления. Фиг.2 представляет собой увеличенный общий вид, показывающий рукоятку 103. Кроме того, фиг.3 представляет собой вид в разрезе, показывающий форму поперечного сечения рукоятки 103, и фиг.4 и 5 представляют собой увеличенные виды, показывающие, каждый, форму поперечного сечения ребер 117, сформированных на рукоятке 103.
Как показано на фиг.1, гвоздезабивной пистолет 100 в соответствии с этим вариантом осуществления содержит корпус 101, узел выталкивания гвоздя 110, сформированный на конце корпуса 101 в продольном направлении, рукоятку 103 (рукоять), соединенную с корпусом 101 и расположенную для того чтобы удерживаться пользователем, магазин 105, загруженный гвоздями как материалом для забивания, и рабочую насадку для забивания гвоздей, расположенную в корпусе 101 (в деталях не показана). Корпус 101 и рабочая насадка являются признаками, которые соответственно относятся к "корпусу инструмента" и "сменной рабочей насадке" в соответствии с настоящим изобретением. На фиг.1, кончик корпуса 101 показывается направленным на обрабатываемую деталь. Соответственно, на фиг.1, горизонтальное направление является направлением приведения в действие приводного узла (продольное направление корпуса 101) и направлением забивания гвоздя, в котором рабочая насадка забивает гвоздь. В дальнейшем описании, сторона узла для выталкивания гвоздя 110 (слева, как видно на фиг.1) берется как передняя сторона, а противоположная сторона (справа как видно на фиг.1) как задняя сторона.
Корпус 101 в основном формируется с помощью оболочки, и оболочка заключает в себе камеру сгорания газа, запальное устройство, топливный инжектор, узел привода, и так далее, которые не показаны. Газ подается из топливного бака (газового баллона) в камеру сгорания газа через топливный инжектор, и газ смешивается с воздухом в камере сгорания газа. В дальнейшем, смешанный газ поджигается с помощью зажигания посредством запального устройства. С помощью энергии горения, генерируемой с помощью этого горения, поршню, который является составной деталью приводного узла, придается линейное движение в сторону конца корпуса 101. Рабочая насадка конструируется для того чтобы перемещаться вместе с поршнем как единое целое и вбивать гвоздь в обрабатываемую деталь с помощью линейного перемещения вперед вместе с поршнем. Узел выталкивания гвоздя 110 формируется на конце корпуса 101 (слева как показано на фиг.1) и служит для того, чтобы направлять перемещение рабочей насадки для забивания гвоздя, и формирует узел для выталкивания гвоздя.
Магазин 105 устанавливается так, чтобы он простирался между концом корпуса 101 и краем рукоятки 103, и один край магазина 105 (на стороне загрузки гвоздя) соединяется с узлом выталкивания гвоздя 110. Магазин 105 содержит множество гвоздей, соединенных друг с другом, и заряжает один гвоздь, который будет забит затем узлом выталкивания 110, после каждого перемещения рабочей насадки для забивания гвоздя.
Контактный палец 107 предусматривается на конце узла выталкивания 110. Контактный палец 107 может проскальзывать по отношению к узлу выталкивания 110 в продольном направлении узла выталкивания 110 (продольное направление гвоздезабивного пистолета 100 и направление забивания гвоздя рабочей насадки) и в нормальных условиях смещен вперед в сторону кончика (слева как показано на фиг.1) с помощью средств смещения. Когда конец контактного пальца 107 прижимается к обрабатываемой детали и отводится назад в сторону корпуса 101, контактный палец 107 герметично закрывает камеру сгорания газа по отношению к внешнему пространству и таким образом создает условия, которые делают возможным сгорание газа в камере сгорания газа.
Рукоятка 103 удерживается пользователем для того, чтобы выполнять действие или для того чтобы переносить гвоздезабивную машину. Фиг.2 представляет собой увеличенный общий вид, показывающий рукоятку 103. Рукоятка 103 простирается от ближнего края захвата 103a, который стыкуется с боковыми сторонами корпуса 101, до дальнего края захвата 103b в таком направлении, что она находится поперек продольного направления рабочей насадки (продольное направление корпуса 101). Конкретно, предусмотрено, что корпус 101 гвоздезабивного пистолета 100 ориентируется так, что направление забивания гвоздей представляет собой горизонтальное направление, как показано на фиг.1, рукоятка 103 простирается сверху вниз от ближнего края захвата 103а к дальнему краю захвата 103b и соединяется на выступающем краю или на дальнем краю от захвата 103b с другим краем магазина 105. Таким образом, рукоятка 103 составляет единое целое с корпусом 103 и магазином 105. Рукоятка 103 является элементом, который соответствует "рукоятке" в соответствии с настоящим изобретением.
Кнопка спускового устройства 109, как соответствующая деталь рабочего элемента, располагается вблизи ближнего края захвата 103 в передней поверхности области рукоятки 103. Кнопка спускового устройства 109 может нажиматься пользователем гвоздезабивного пистолета 100. С помощью нажатия кнопки спускового устройства 109 приводятся в действие топливный инжектор и воспламенитель. Конкретно, топливо в баке для топлива подается в камеру сгорания газа через топливный инжектор и через заданный интервал времени после этого воспламеняется с помощью воспламенителя.
В гвоздезабивном пистолете 100, имеющем описанную выше конструкцию, когда пользователь прижимает контактный палец 107 к обрабатываемой детали, а затем нажимает кнопку спускового устройства 109, в то же время, удерживая рукоятку 103 одной рукой, гвоздезабивной пистолет 100 приводится в действие и рабочая насадка выполняет перемещение для забивания гвоздя. Принцип работы гвоздезабивного пистолета 100, работающего на сгорании газа, сам по себе относится к известной области, и по этой причине его конструкция и действие в дальнейшем не будут подробно описываться.
Как показано на фиг.3, на виде в разрезе, рукоятка 103 имеет эллиптическую форму, имеющую большую ось в ее продольном направлении и меньшую ось в направлении (в ее поперечном направлении), поперечном к направлению вдоль продольной оси. Палец пользователя, удерживающий рукоятку, показывается с помощью двухточечной штрихпунктирной линии. Рукоятка 103 имеет корпус, изготовленный из твердого материала (твердого синтетического полимерного материала или другого похожего материала). Прокладка из мягкого материала (мягкого синтетического полимерного материала), который мягче чем жесткий материал, дополнительно создается вокруг корпуса. Прокладка показана с помощью диагональной штриховки на фиг.1 и содержит переднюю контактную часть захвата 113 и заднюю контактную часть захвата 115. Передняя контактная часть захвата 113 формируется на передней и боковых поверхностях рукоятки 103, и задняя контактная часть захвата 115 формируется на задней поверхности рукоятки 103. Посредством создания прокладки, имеющей такую конструкцию, рукоятка 103 может обеспечивать мягкое ощущение захвата для пользователя, который удерживает рукоятку 103 и выполняет действие забивания гвоздя.
Рукоятка 103 имеет некоторую длину в своем продольном направлении (вертикальное направление гвоздезабивного пистолета 100, расположенного в горизонтальном положении), которая достаточно велика для того, чтобы удерживать его с помощью одной руки. Кроме того, рукоятка 103 имеет такую большую толщину, при которой обеспечивается расстояние около 1 см между концом первого (большого) пальца и концом пальца у второго (указательного) пальца руки пользователя, удерживающей захват.
Внешняя поверхность захвата рукоятки 103 или большая часть внешней поверхности рукоятки 103 формируется с помощью прокладки. На внешней поверхности передней контактной части захвата 113 предусматривается множество затрудняющих проскальзывание ребер 117, которые формируют прокладку и располагаются в целом эквидистантно в направлении вдоль окружности. Ребра 117 простираются параллельно вдоль продольного направления рукоятки 103. Ребра 117 представляют собой признаки, которые соответствуют "ребрам" в соответствии с настоящим изобретением. В этом варианте осуществления, ребра 117 формируются в области внешней поверхности захвата (внешняя поверхность) передней контактной части захвата 113, на которой кончики пальцев третьего пальца (средний палец), четвертого пальца (безымянный палец) и пятый палец (мизинец) руки пользователя располагаются, когда удерживают рукоятку. Конкретно, ребра 117 формируются на правой и левой сторонах передней контактной части захвата 113, что делает возможным, как захват правой рукой, так и захват левой рукой.
Важно, чтобы рукоятка 103 имела при захвате характеристики легкого захватывания и сопротивления проскальзыванию. С этой точки зрения, в этом варианте осуществления, интервалы между ребрами 117 в направлении вдоль окружности предусматриваются в таком диапазоне расстояний, что подушечки пальцев пользователя могут удерживаться в контакте с внешней поверхностью захвата (внешняя поверхность) до такой степени, что кончики пальцев могут зацепляться с ребрами 117 безотказно, когда они удерживают рукоятку.
Кроме того, как показано в фиг.4 и 5, каждое из ребер 117 имеет форму рифления, которая зацепляется в одном направлении, но не зацепляется или с трудом зацепляется в другом направлении с подушечками кончиков пальцев, третьего-пятого пальцев пользователя, когда пользователь удерживает рукоятку 103. Конкретно, в этом варианте осуществления, ребро 117 имеет профиль, в целом скошенный в направлении, поперечном к продольному их направлению, и имеет одну сторону, сформированную с помощью пологой наклонной поверхности 117a, и другую сторону, сформированную с помощью крутой наклонной поверхности 117b, в направлении вдоль окружности рукоятки 103. Другими словами, скошенные стороны ребер 117 простираются от самой верхней части 117 с к внешней поверхности захвата и одна из сторон (крутая наклонная поверхность 117b) короче, чем другая сторона (пологая наклонная поверхность 117a) в направлении вдоль окружности рукоятки 103. Форма рифления формируется таким образом, чтобы стороны кончиков пальцев, у третьего-пятого пальцев, из пальцев, удерживающих захват, располагались на крутой наклонной поверхности 117b, и стороны основания третьего-пятого пальцев располагались на пологой наклонной поверхности 117а. По этой причине, как показано на фиг.3, пологая наклонная поверхность 117a и крутая наклонная поверхность 117b каждого из ребер 117 на одной стороне (нижняя сторона как видно на фиг.3) передней контактной части захвата 113 конструируются так, чтобы они располагались в обратную сторону от ребер 117 на другой стороне (верхняя сторона, как видно на фиг.3). Таким образом, создаются одинаковые условия для захвата правой рукой и захвата левой рукой. Крутая наклонная поверхность 117b и пологая наклонная поверхность 117a являются признаками, которые соответствуют "одной наклонной поверхности" и "другой наклонной поверхности", соответственно, в соответствии с настоящим изобретением.
При создании ребер 117, имеющие форму поперечного сечения, сконструированную, как описано выше, когда третий-пятый пальцы скользят вокруг продольного направления рукоятки 103 (в направлении вдоль окружности внешней поверхности захвата), кончики пальцев не имеют возможности зацепляться с ребрами 117 в направлении перемещения вперед, и зацепляются в направлении перемещения назад.
Если рассматривать процесс удерживания (захватывания) рукоятки 103 с помощью пальцев, как показано в фиг.4 и 5, подушечки пальцев вступают в контакт с внешней поверхностью захвата рукоятки 103 последовательно от стороны основания до стороны кончиков пальцев. По этой причине, каждое из ребер 117 формируется так, чтобы они не зацеплялись или зацеплялись с трудом с подушечками кончиков пальцев или имели пологую наклонную поверхность 117a, в направлении вперед к кончикам пальцев от основания пальцев пользователя, удерживающего рукоятку 103. При этой конфигурации, пользователь может удерживать рукоятку без сопротивления на подушечках кончиков пальцев, таким образом, может быть обеспечено облегчение захвата. С другой стороны, в направлении до основания от кончиков пальцев пользователя, удерживающих рукоятку 103, ребро 117 формируется, чтобы оно зацеплялось с подушечками кончиков пальцев или имело крутую наклонную поверхность 117b. В этой конфигурации, ребро 117 может служить как препятствие для скольжения, таким образом, сила захвата может быть улучшена и в результате, это позволяет пользователю легко удерживать рукоятку 103 во время работы.
Конкретно, посредством создания ребра 117 которое имеет поперечное сечение скошенной треугольной формы, имеющего одну сторону, сформированную с помощью пологой наклонной поверхности 117a, и другую сторону, сформированную с помощью крутой наклонной поверхности 117b, рукоятка 103 может быть изготовлена так, чтобы она легко захватывалась и плохо проскальзывала, таким образом, могут быть улучшены характеристики захватывания. Отношение длины одной стороны или пологой наклонной поверхности 117a к длине другой стороны или крутой наклонной поверхности 117b ребра 117 может быть определено, принимая во внимание характеристики при захвате с легким захватыванием и плохим проскальзыванием. Кроме того, предпочтительно, участок, где соединяются пологая наклонная поверхность 117a и крутая наклонная поверхность 117b, или вершина 117c ребра 117 соответствующим образом округляется, чтобы не вызывать боли в пальцах пользователя. Кроме того, пологая наклонная поверхность 117a и крутая наклонная поверхность 117b не обязательно должны быть плоскими, но они могут быть и изогнутыми.
Кроме того, область, удерживаемая в контакте с большей частью ладони пользователя, и внешняя поверхность задней контактной части захвата 115 не снабжаются какими-либо ребрами 117. Такая гладкая изогнутая внешняя поверхность задней контактной части захвата 115 обеспечивает мягкое ощущение для ладони.
Кроме того, как показано на фиг.2, конечная область захвата расположена чуть смещенной внутрь от дальнего края захвата 103b, а более конкретно, конечная область захвата 119, содержащая область контакта подушечки для мизинца (область задней поверхности) 119a, имеет длину вдоль окружности больше (или диаметр захвата больше), чем у области, расположенной внутри конечной области захвата 119. Таким образом, при конфигурации, в которой конечная область захвата 119, содержащая область для подушечки мизинца 119a, имеет большую длину вдоль окружности, момент (торцевая вибрация), действующий на гвоздезабивную машину 100, может эффективно гаситься в состоянии с удерживанием захвата.
В соответствии с показательной гвоздезабивной машиной 100, центр тяжести всего гвоздезабивного пистолета располагается выше и впереди рукоятки 103 в сторону корпуса 101. По этой причине, например, когда пользователь выполняет действие забивания гвоздей во время удерживания рукоятки 103, на гвоздезабивной пистолет 100 в горизонтальном положении действует момент, в том направлении, которое опускает вниз переднюю часть корпуса 101, или он вызывает торцевую вибрацию. В соответствии с показательным вариантом осуществления, посредством создания конечной области захвата 119 с большим диаметром, включая область контакта для подушечки мизинца 119a, проскальзывание подушечки мизинца затрудняется, таким образом, она может эффективно поддерживать описанный выше момент. Создание конечной области захвата 119 с большим диаметром соответствует "положению препятствия для скольжения в области задней поверхности" в соответствии с настоящим изобретением.
Кроме того, при отпускании кнопки спускового устройства 109 в области передней поверхности ближнего края захвата 103a рукоятки 103 с помощью указательного пальца пользователя при операции забивания гвоздей с использованием гвоздезабивного пистолета 100, легкость работы зависит от того, затрудняется ли скольжение большого пальца или нет. В этом варианте осуществления, как показано на фиг.1 и 2, на боковой стороне передней контактной части захвата 113 формируется рабочая точка 121 для большого пальца. Рабочая точка 121 для большого пальца представляет собой углубление, сформированное на внешней поверхности захвата и имеющее эллиптическую форму, относительно вытянутое в продольном направлении. Кроме того, поверхность углубления делается зернистой. Рабочая точка 121 большого пальца располагается на продолжениях ребер 117 в направлениях их протяженности.
Как описано выше, посредством создания рабочей точки 121 для большого пальца, сформированной с помощью углубления на внешней поверхности захвата, проскальзывание большого пальца может затрудняться, таким образом, может быть обеспечена простота работы при отпускании кнопки спускового устройства 109 с помощью указательного пальца.
Кроме того, если область внешней поверхности захвата, с которой удерживается в контакте кожная складка между первым и вторым пальцами, когда удерживают рукоятку, имеет маленький диаметр захвата, пользователь может испытывать боль в кожной складке при продолжительной работе. По этой причине, эта область также конфигурируется так, чтобы она имела больший диаметр захвата, чем любая другая область внешней поверхности захвата, для того чтобы предотвратить возникновение ощущения боли в кожной складке пользователя.
(Второй вариант осуществления)
Второй вариант осуществления настоящего изобретения описывается теперь со ссылками на фиг.6 до 12. В этом варианте осуществления, электрическая ручная фрезеровальная машина 2 00 для выполнения зенкования, вырезания или других похожих действий над обрабатываемой деталью имеет пару ушкообразных рукояток 203, каждая из них имеет ребра 217. Фиг.6 представляет собой вид спереди, показывающий электрическую ручную фрезеровальную машину 200 в целом.
Как показано на фиг.6, электрическая ручная фрезеровальная машина 200 содержит стол 205, который может помещаться на обрабатываемой детали, и корпус электрической ручной фрезеровальной машины 201, установленный в вертикальном положении на столе 205. Внутри корпуса электрической ручной фрезеровальной машины 201, ориентирован вертикально электрический двигатель, с приводным валом, направленным сверху вниз, который не показан. Держатель режущего инструмента для удерживания сменной рабочей насадки в форме фасонной фрезы устанавливается на приводном валу двигателя. Корпус электрической ручной фрезеровальной машины 201 и фасонной фрезы представляют собой элементы, которые соответствуют "корпусу инструмента" и "сменной рабочей насадке", соответственно, в соответствии с настоящим изобретением. Пара рукояток 203 формируются на правой и левой стороне корпуса электрической ручной фрезеровальной машины 201. Подробная конструкция электрической ручной фрезеровальной машины 200 непосредственно не относится к изобретению, и не будет описываться далее.
Для того чтобы выполнять работу с помощью фасонной фрезы электрическая ручная фрезеровальная машина 200 конструируется как описано выше, рукоятки 203 удерживаются и стол 205 располагается на обрабатываемой детали и скользит в продольном и поперечном направлениях.
Правая и левые рукоятки 203 в соответствии с настоящим вариантом осуществления имеют в основном T-образную форму в горизонтальной ориентации, если смотреть спереди или сзади. Кроме того, на одной (правой как видно на фиг.6) из рукояток, на рукоятке 203, создается исполнительный узел 207, и он работает, включая и выключая электрический переключатель для приведения в действие электрического двигателя.
Конструкция рукоятки 2 03 теперь объясняется со ссылками на фиг.7-12. фиг.7 представляет собой вид спереди рукоятки 203, если смотреть в направлении указателя A на фиг.6, и фиг.8 представляет собой ее вид сзади. Фиг.9 представляет собой вид в разрезе, взятый вдоль линии В-В на фиг.8, и фиг.10 представляет собой увеличенный вид части С на фиг.9. Фиг.11 представляет собой вид в разрезе, взятый вдоль линии D-D на фиг.8, и фиг.12 представляет собой увеличенный вид части E на фиг.11.
Рукоятка 2 03, имеющая Т-образную форму, имеет область захвата в форме детали 203а, соответствующей головке Т-образной формы, и установочную деталь в форме детали 203b, соответствующей ножке T-образной формы (смотри фиг.6). Имеющая T-образную форму рукоятка 203 удерживается таким образом, чтобы область захвата или деталь 203, соответствующая головке T-образной формы, охватывалась ладонью пользователя. По этой причине, как и в описанном выше первом варианте осуществления, внешняя поверхность захвата рукоятки 203 имеет корпус, изготовленный из твердого материала (твердого синтетического полимерного материала или другого сходного материала), и прокладку в форме контактной части захвата 213, изготовленную из мягкого материала (мягкого синтетического полимерного материала или каучукового материала), который мягче чем твердый материал, и она создается вокруг корпуса (смотри фиг.7 - фиг.9 и фиг.11). Прокладка показывается с помощью диагональной штриховки на фиг.7 и 8. Посредством создания такой прокладки, рукоятка 203 может создавать при захвате мягкое ощущение для пользователя, который удерживает рукоятку 203 и выполняет работу с помощью электрической ручной фрезеровальной машины 200.
В случае рукоятки 203 того типа, который удерживается таким образом, что область захвата соответствует головке Т-образной формы, охватываемой ладонью, кончики пальцев, второго-пятого пальцев, достигают обратной стороны контактной части захвата 213, когда удерживается рукоятка. По этой причине, формируется множество параллельных ребер 217 в задней части контактной части захвата 213, которая удерживается в контакте с кончиками пальцев, из пальцев, удерживающих захват, (смотри фиг.8, 9 и 11). Когда направление протяженности пальцев, удерживающих захват, определяется как направление вдоль окружности рукоятки 203, ребра 217 простираются вдоль контура внешней поверхности захвата в продольном направлении рукоятки 203. Ребра 217 формируются в области захвата на обеих сторонах детали 203b, соответствующей ноге рукоятки или простираются с перерывами в направлении ее протяженности.
Каждое из ребер 217 имеет такую же форму поперечного сечения, как и ребра из описанного выше первого варианта осуществления, в направлении, поперечном к направлению протяженности. Конкретно, как показано в фиг.10 до 12, ребро 217 имеет форму рифления или имеет сечение скошенной треугольной формы в направлении, поперечном к направлению протяженности, имеющее одну сторону, сформированную с помощью пологой наклонной поверхности 217a, и другую сторону, сформированную с помощью крутой наклонной поверхности 217b, в направлении вдоль окружности рукоятки 203. Другими словами, скошенные стороны ребра 117 простираются от вершины 217c до внешней поверхности захвата, и одна из сторон (крутая наклонная поверхность 217b) короче, чем другая сторона (пологая наклонная поверхность 217a) в направлении вдоль окружности рукоятки 203. Форма рифления формируется таким образом, чтобы стороны кончиков пальцев, второго-пятого пальцев, из пальцев, удерживающих захват, располагались на крутой наклонной поверхности 217b и стороны оснований второго-пятого пальцев располагались на пологой наклонной поверхности 217a. Крутая наклонная поверхность 217b и пологая наклонная поверхность 217a являются элементами, которые соответствуют "одной наклонной поверхности" и "другой наклонной поверхности", в указанном порядке, в соответствии с настоящим изобретением.
По этой причине, в соответствии с настоящим изобретением, посредством создания ребра 217, которое имеет поперечное сечение скошенной треугольной формы, имеющее одну сторону, сформированную с помощью пологой наклонной поверхности 217a, и другую сторону, сформированную с помощью крутой наклонной поверхности 217b, ребро 217 имеет форму рифления, которое зацепляется в одном направлении, но никогда не зацепляется или плохо зацепляется в другом направлении с подушечками кончиков пальцев, когда пользователь удерживает рукоятку 203. При этой конфигурации, рукоятка 2 03 может получить улучшенные характеристики при захвате, так как облегчается захват и усложняется проскальзывание.
Хотя, в описанном выше варианте осуществления, ребра 117, 217, каждое, описываются как сформированные на соответствующих прокладках рукоятки 103, 203, которые изготавливаются из мягкого материала, эти прокладки могут отсутствовать, и ребра могут быть сформированы на соответствующих корпусах рукояток 103, 203, которые изготавливаются из твердого материала.
Кроме того, хотя в описанных выше вариантах осуществления, изобретение описывается в применении к рукоятке 103 гвоздезабивного пистолета 100 и к рукоятке 203 электрической ручной фрезеровальной машины 200, его применения не ограничиваются этим.
Описание ссылочных номеров
100 гвоздезабивной пистолет (приводной инструмент)
101 корпус (корпус инструмента)
103 рукоятка
103a ближний край захвата
103b дальний край захвата
105 магазин
107 контактный палец
109 кнопка спускового устройства
110 узел выталкивания гвоздя
113 передняя контактная часть захвата
115 задняя контактная часть захвата
117 ребро
117a пологая наклонная поверхность (другая наклонная поверхность)
117b крутая наклонная поверхность (одна наклонная поверхность)
117c вершина
119 конечная область захвата
119a область для контакта подушечки мизинца (область задней поверхности)
121 рабочая точка для большого пальца
200 электрическая ручная фрезеровальная машина (приводной инструмент)
201 корпус электрической ручной фрезеровальной машины (корпус инструмента)
203 рукоятка
203a часть, соответствующая головке T-образной формы
203b часть, соответствующая ноге T-образной формы
205 стол
213 контактная часть захвата
217 ребро
217a пологая наклонная поверхность (другая наклонная поверхность)
217b крутая наклонная поверхность (одна наклонная поверхность)
217c вершина


Изобретение относится к ручным приводным инструментам. Приводной инструмент 101 для выполнения заданной операции с помощью приведения в действие сменной рабочей насадки содержит рукоятку 103, сформированную на корпусе инструмента, внешнюю поверхность захвата, предусмотренную на расположенной вдоль окружности поверхности рукоятки, и множество ребер 117, сформированных параллельно друг другу на внешней поверхности захвата так, чтобы они выступали над внешней поверхностью захвата. Каждое ребро располагается на внешней поверхности захвата в продольном направлении рукоятки и имеет форму рифления, допускающую зацепление ребра с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальцев руки пользователя, удерживающих рукоятку, в одном из направлений вдоль окружности рукоятки и одновременно не допускающую зацепления ребра с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальцев руки пользователя, удерживающих рукоятку, в другом направлении из направлений вдоль окружности. Технический результат заключается в повышении характеристик захватывания рукоятки приводного инструмента пользователем. 7 з.п. ф-лы, 12 ил.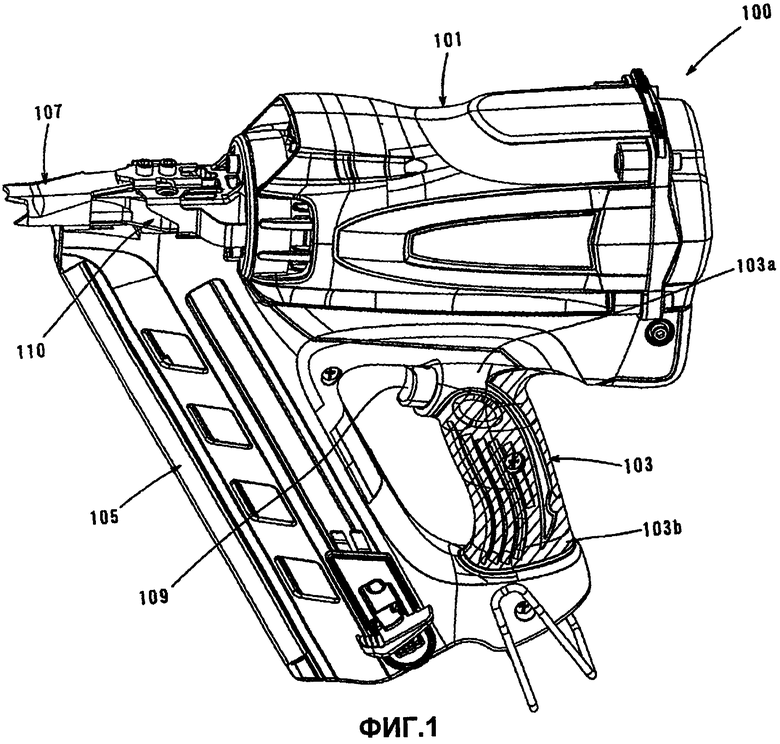
1. Приводной инструмент, выполняющий заданную операцию путем приведения в действие сменной рабочей насадки, содержащий корпус инструмента, рукоятку, сформированную на корпусе инструмента, внешнюю поверхность захвата, предусмотренную на расположенной вдоль окружности поверхности рукоятки, и множество ребер, сформированных параллельно друг другу на внешней поверхности захвата так, чтобы они выступали над внешней поверхностью захвата, при этом каждое ребро располагается на внешней поверхности захвата в продольном направлении рукоятки и имеет форму рифления, допускающую зацепление ребра с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальцев руки пользователя, удерживающих рукоятку, в одном из направлений вдоль окружности рукоятки, и в одновременно не допускающую зацепления ребра с подушечками кончиков пальцев, по меньшей мере, третьего-пятого пальцев руки пользователя, удерживающих рукоятку, в другом направлении из направлений вдоль окружности.
2. Приводной инструмент по п.1, в котором каждое ребро имеет поперечное сечение треугольной формы, при этом стороны треугольного сечения сформированы с помощью наклонных поверхностей, располагающихся от внешней поверхности захвата до вершины, а одна из наклонных поверхностей выполнена короче, чем другая наклонная поверхность.
3. Приводной инструмент по п.1, в котором для установки корпуса инструмента в продольном направлении в горизонтальное положение центр тяжести приводного инструмента располагается выше и впереди рукоятки в направлении, в котором располагается указательный палец при отгибе его из положения удерживания захвата, при этом рукоятка располагается в направлении, поперечном к продольному направлению корпуса инструмента так, чтобы она имела конечные участки в продольном направлении, при этом для создания препятствия для скольжения в области задней поверхности конечных участков рукоятка выполнена с возможностью удерживания в контакте с подушечкой мизинца руки пользователя рукоятки.
4. Приводной инструмент по п.3, в котором для создания препятствия для скольжения и обеспечения контакта рукоятки с подушечкой мизинца руки пользователя рукоятка имеет длину вдоль окружности конечного участка, содержащего область задней поверхности, большую, чем у центрального участка, расположенного внутри конечного участка.
5. Приводной инструмент по п.1, в котором рукоятка выполнена расположенной в направлении, поперечном к продольному направлению корпуса инструмента, и имеет конечные участки в продольном направлении, при этом на одном из конечных участков, соответствующем большому пальцу руки пользователя, создана рабочая точка для пальца, предназначенная для размещения подушечки большого пальца, при этом выемки для пальцев формируют с помощью углублений на внешней поверхности захвата.
6. Приводной инструмент по п.5, в котором рабочая точка для большого пальца располагается, по меньшей мере, частично на выступающих частях ребер.
7. Приводной инструмент по п.1, в котором рукоятка имеет вытянутую форму и выполнена с непрерывно выступающими ребрами.
8. Приводной инструмент по п.1, в котором рукоятка имеет Т-образную форму, при этом рукоятка снабжена прокладкой Т-образной формы, по обеим сторонам которой расположены ребра.
| JP 2002254341 A, 10.09.2002 | |||
| US 2005055835 A1, 17.03.2005 | |||
| US 2005166741 A1, 08.04.2005 | |||
| JP 2001198856 A, 24.07.2001 | |||
| СОСТАВНАЯ РУКОЯТКА БРИТВЫ | 1993 |
|
RU2099178C1 |

