Изобретение относится к области машиностроения и предназначается для использования в транспортных, грузоподъемных механизмах, автомобилестроении и станкостроении в качестве встраиваемого управляемого зубчатого механизма или отдельного устройства для бесступенчатого изменения передаточного отношения и преобразования или поглощения крутящего момента.
Две или более зубчатые передачи образуют зубчатый механизм. Эти механизмы описаны, например, в Артоболевский И.И. «Механизмы в современной технике», т.4 «Зубчатые механизмы». Зубчатые передачи и механизмы - это самый распространенный вид механизмов. Зубчатые передачи и механизмы обладают большой передаваемой мощностью на единицу массы, компактностью, долговечностью, высоким к.п.д. Они предназначены для передачи вращательного движения и преобразования его параметров и при этом выполнены или с постоянным передаточным отношением, или с возможностью ступенчатого изменения выходных параметров.
Недостатком известных зубчатых передач и механизмов является невозможность непрерывного и управляемого регулирования величины передаваемого приложенного крутящего момента или его поглощения при постоянной или бесступенчато изменяющейся скорости вращения выходного звена относительно входного в зависимости от частного случая применения.
Известны адаптивные зубчатые механизмы, передаточное отношение которых зависит от нагрузки на выходном валу. Примером такого механизма является «вариатор Хамукова», содержащий два дифференциальных механизма, кинематически связанных между собой зубчатыми передачами, и обгонную муфту на валу одного из центральных колес (RU, №2146022, F16H 3/44, опубл. 27.02.2000 г.). Недостатками данного механизма являются зависимость от нагрузки на выходном звене и отсутствие звена, осуществляющего управление передаточным отношением. При этом конкретное значение передаточного числа данного вариатора определяется отношением момента на выходном звене вариатора, создаваемом нагрузкой рабочего органа, к моменту на входном звене вариатора, т.е. к моменту, создаваемому двигателем.
Известны случаи заклинивания зубчатых передач и механизмов, в частности передач с коническими колесами, требующих тщательной сборки, так как при продольном смещении колес в ту или другую сторону от заданного положения изменяется зазор между зубьями, что может приводить к защемлению зубьев, нарушению работоспособности колес и заклиниванию. Это явление при определенных условиях и конструкции зубчатого механизма может быть полезным. Идея получения состояния, безопасного для зубчатого зацепления управляемого заклинивания и расклинивания зубчатых колес в зубчатой передаче, может быть использована при создании зубчатого механизма преобразования или поглощения крутящего момента с возможностью управляемого заклинивания и создания на его основе преобразователя крутящего момента и передаточного отношения.
Известны устройства, выполняющие преобразование крутящего момента и передаточного отношения. Из предшествующего уровня техники близкими по достигаемому результату известны несколько типов устройств. Одними из таких являются, например, гидродинамические преобразователи крутящего момента (гидротрансформаторы), входящие в состав автоматических трансмиссий. В них кинетическая энергия рабочей жидкости используется для передачи крутящего момента от коленчатого вала двигателя на входное звено коробки передач. Гидротрансформатор состоит из насосного колеса, турбинного колеса и реактора. Двигатель приводит во вращение насосное колесо. Масло, находящееся между лопатками насосного колеса, под действием центробежной силы устремляется к его периферийной части и попадает на турбинное колесо. На турбинном колесе масло отдает часть своей энергии, способствуя тем самым его вращению. На выходе из турбинного колеса масло попадает в реактор, где с помощью лопаток специального профиля изменяет направление движения и попадает в насосное колесо. Для блокировки в гидротрансформаторах применяется фрикционная муфта, связывающая турбинное и насосное колесо.
Недостатками данных гидродинамических преобразователей крутящего момента являются большие габариты, низкая технологичность, большое количество деталей, что усложняет процесс сборки. При этом существующие гидродинамические преобразователи крутящего момента бесполезно рассеивают часть энергии, имеют систему охлаждения и не дают возможность с точностью регулировать частоту вращения или замедления при изменении величины действующей нагрузки и скорости вращения, а также имеют низкий коэффициент полезного действия.
Известен преобразователь передаточного отношения (RU №2385433, F16H 37/08, F16H 48/22, F16 Н35/02, В60К 17/16, опубл. 27.03.2010 г.), содержащий планетарный дифференциал, при этом одно из центральных колес через выходной вал, а другое через редуктор связаны между собой посредством фрикционной муфты. Недостатками этого решения являются неоптимальный режим работы, использование фрикционной муфты, испытывающей большие нагрузки и не дающие возможность длительной работы в режиме преобразования передаточного отношения при передаче большого по величине крутящего момента при меняющемся передаточном отношении.
Известен регулятор скорости (RU №2380733, G05D 13/00, опубл. 27.01.2010 г.), содержащий планетарный редуктор и два приводных электродвигателя, один из которых связан с внешним колесом, а другой - с шестерней редуктора. Данное устройство позволяет плавно регулировать скорость рабочего механизма, но основную нагрузку при этом воспринимают два электродвигателя, а редуктор только распределяет крутящий момент.
Задача, на решение которой направлено заявленное изобретение, заключается в реализации идеи создания встраиваемого зубчатого механизма с возможностью управляемого безопасного заклинивания и расклинивания входящих в его состав и находящихся в зацеплении зубчатых колес. А также, на его основе, с использованием устройства или механизма управления создания преобразователя крутящего момента и передаточного отношения с возможностью использования его в качестве вариатора, при этом обладающего высоким коэффициентом полезного действия, не требующего систем охлаждения, способного надежно работать как на низких, так и на высоких скоростях, в котором основная силовая нагрузка приходится на зубчатый механизм. И отвечать современным требованиям эксплуатации.
1. Поставленная задача по дифференциальному встраиваемому зубчатому механизму преобразования крутящего момента решается за счет того, что он содержит центральный вал, входное звено, являющееся входным звеном первой планетарной передачи, два выходных звена которой соединены или объединены попарно с двумя входными звеньями второй планетарной передачи, выходное и одно входное звено которой соединены или объединены попарно с двумя входными звеньями третьей планетарной передачи, с выходным звеном, являющимся выходным звеном зубчатого механизма. Причем на водила двух подобных планетарных передач установлены двухвенцовые сателлиты с зубчатыми венцами разного диаметра, находящиеся одновременно в зацеплении с, по меньшей мере, общими для них двумя центральными зубчатыми колесами разного диаметра. При этом, по меньшей мере, одно звено зубчатого механизма, не являющееся входным или выходным, может служить звеном управления.
Звеном управления зубчатого механизма, предпочтительно, является центральный вал.
Предпочтительно содержит корпус с подшипниковыми опорами.
Между выходным звеном и корпусом может быть установлена муфта сцепления любой известной конструкции.
Выходное звено зубчатого механизма может быть выполнено в виде корпусной детали.
2. Поставленная задача по преобразователю крутящего момента и передаточного отношения решается за счет того, что он содержит дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента с входным, выходным звеном и звеном управления и механизм управления с выходным звеном, кинематически связанным со звеном управления зубчатого механизма, выполненный с возможностью регулирования и изменения скорости вращения своего выходного звена, в виде известного устройства, предпочтительно либо электродвигателя, либо тормоза-замедлителя, либо механической передачи, кинематически связанной своим входным звеном с входным или выходным звеном зубчатого механизма.
Предпочтительно дополнительно содержит механизм реверса.
Достигаемый технический результат заключается в создании зубчатых механизмов с возможностью управляемого безопасного заклинивания, а также устройств, способных выполнять преобразование скорости вращения и передаваемого крутящего момента или его поглощение, величина которого зависит только от прочностных характеристик зубчатых колес.
Достигается путем использования технических решений в конструкции, позволяющих получать состояние управляемого заклинивания и расклинивания между входным и выходным звеном зубчатого механизма, а также оптимальном уменьшении размеров, веса, стоимости относительно существующих близких по достигаемому результату устройств.
Изобретение поясняется чертежами, которые не охватывают и, тем более, не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения.
На фиг.1 приведена кинематическая схема дифференциального встраиваемого зубчатого механизма преобразования крутящего момента.
На фиг.2 - разрез А-А на фиг.1.
На фиг.3 - кинематическая схема дифференциального встраиваемого зубчатого механизма преобразования крутящего момента, частный случай выполнения.
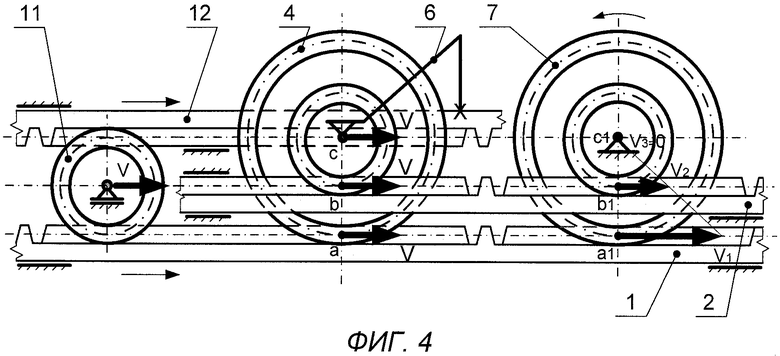
На фиг.4 - линейная схема возможных перемещений и скоростей зубчатых колес дифференциального встраиваемого зубчатого механизма преобразования крутящего момента на фиг.1.
На фиг.5 - линейная схема возможных сил и моментов при приложенной нагрузке к входному звену дифференциального встраиваемого зубчатого механизма преобразования крутящего момента на фиг.1.
На фиг.6 - схема дифференциального встраиваемого зубчатого механизма преобразования крутящего момента с примером приложенных крутящих моментов, в частных случаях использования.
На фиг.7 - кинематическая схема преобразователя крутящего момента и передаточного отношения, вариант 1.
На фиг.8 - кинематическая схема преобразователя крутящего момента и передаточного отношения, вариант 2.
На фиг.9 - кинематическая схема преобразователя крутящего момента и передаточного отношения, вариант 3.
Рассмотрим кинематическую схему дифференциального встраиваемого зубчатого механизма преобразования крутящего момента на фиг.1 и 2. Дифференциальный зубчатый механизм преобразования крутящего момента содержит центральный вал 3, входное звено - водило 9, которое может являться и выходным звеном, при этом является звеном первой дифференциальной планетарной передачи с одновенцовыми зубчатыми сателлитами 11. Сателлиты находятся в зацеплении с двумя центральными зубчатыми колесами, первое 10 из которых установлено и закреплено на центральном валу, а второе 12 установлено с возможностью вращения относительно центрального вала. Два звена первой дифференциальной планетарной передачи соединены попарно с двумя звеньями второй планетарной передачи. Вторая планетарная передача содержит водило 6 с двухвенцовым зубчатым сателлитом 4 в виде блока из двух зубчатых колес разного диаметра на оси 5, находящимися в зацеплении с двумя центральными зубчатыми колесами 1 и 2. Первое центральное зубчатое колесо 1 установлено и закреплено на центральном валу, а второе 2 установлено с возможностью вращения относительно центрального вала. Центральные зубчатые колеса 1 и 2 являются общими для второй и третьей планетарных передач и находятся в зацеплении с двухвенцовым зубчатым сателлитом 7, выполненным в виде блока из двух зубчатых колес разного диаметра на оси 8, установленным на водиле 13 третьей планетарной передачи. Выходное звено - водило 13 - является выходным звеном зубчатого механизма, но в зависимости от частных случаев использования всего механизма может являться и входным звеном. При этом звеном управления служит центральный вал 3 или, в зависимости от частного случая использования, водило 6 второй планетарной передачи.
Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента, представленный на фиг.1 и 2, работает следующим образом. Для этого рассмотрим частный случай на фиг.3, когда механизм встроен в корпус 15, а водило третьей планетарной передачи 13 заторможено и зафиксировано относительно корпуса при помощи блокировочной муфты 14 или включено в корпус механизма.
Крутящий момент и вращение подаются на входное звено - водило 9 первой дифференциальной планетарной передачи. Через сателлиты 11 движение передается на малое центральное зубчатое колесо 10, закрепленное на центральном валу 3 и на большое центральное зубчатое колесо 12, соединенное с водилом 6 второй планетарной передачи. Сателлиты передают равные усилия одновременно на оба центральных зубчатых колеса, так как являются рычагами с равными плечами относительно собственной оси вращения, через которую сателлит и получает тяговое усилие. Таким образом, при помощи первой дифференциальной планетарной передачи происходит деление потока мощности на две равные части.
Передача этих потоков происходит по двум направлениям. По первому направлению от малого центрального зубчатого колеса 10 первой дифференциальной планетарной передачи вращение и усилие передаются через центральный вал 3 на первое центральное зубчатое колесо 1. Далее на установленное второе центральное зубчатое колесо 2, имеющее возможность вращения относительно центрального вала и получающее свою скорость вращения через блок из двух зубчатых колес в виде сателлита 7, установленного на оси 8, заторможенного водила 13 третьей планетарной передачи. По второму направлению поток мощности передается от большого центрального зубчатого колеса первой дифференциальной планетарной передачи 12 на связанное с ним водило 6 второй планетарной передачи. На оси 5 водила 6 установлен сателлит 4, аналогичный сателлиту 7, представляющий собой блок из двух зубчатых колес разного диаметра. Причем этот сателлит находится в постоянном зацеплении с первым и вторым центральными зубчатыми колесами 1 и 2. При заторможенном водиле 13 третьей планетарной передачи, как в нашем случае, водило 6 второй планетарной передачи имеет возможность поворачиваться вместе со вторым центральным зубчатым колесом 12 первой дифференциальной планетарной передачи на оси, совпадающей с осью центрального вала, на величину Δ°, которая зависит только от зазоров в зубчатых передачах зубчатого механизма. Таким образом, оба потока сходятся на двух зубчатых венцах и оси сателлита 4 второй планетарной передачи в замкнутой системе зубчатых передач.
А так как, при условии, что оба потока мощности равны между собой и действуют на сателлит 4 разнонаправлено, то если не учитывать возникающие внутренние силы трения, происходит заклинивание зубчатого механизма, а приложенный к входному звену крутящий момент передается на водило 13 третьей планетарной передачи и далее на корпус механизма.
Для вывода системы из равновесия и расклинивания зубчатых передач достаточно приложить небольшой по величине, для преодоления сил трения в подшипниковых опорах и возникающих на зубчатых венцах зубчатых колес при их взаимодействии, управляющий крутящий момент, например к центральному валу 3 зубчатого механизма. И в этом случае мы получаем управляемое замедление вращения входного звена зубчатого механизма. А весь механизм, как частный случай или как один из вариантов использования, будет являться управляемым поглотителем крутящего момента или, говоря иначе, управляемым замедлителем - ретардером. При случае, когда водило 13 не связано с корпусом, приложенный к входному звену крутящий момент и вращение передаются далее к любому исполнительному звену, связанному с водилом 13, а управление скоростью вращения выходного звена осуществляется аналогичным описанному выше способом.
В идеальном случае, для достижения состояния заклинивания, размеры всех зубчатых колес принимаются с таким расчетом, чтобы соблюдалось условие равновесия. В данной схеме, как частном случае, диаметры зубчатых колес 1, 10 равны между собой и в два раза меньше диаметра зубчатого колеса 2, и в три раза меньше диаметра второго центрального зубчатого колеса 12 первой дифференциальной планетарной передачи. В результате на один оборот зубчатого колеса 2, при заторможенном водиле 13, зубчатые колеса 1 и 10 сделают четыре оборота
i=1+Z12/Z1=4,
где i - передаточное отношение;
Z12 - число зубьев центрального зубчатого колеса 12;
Z1 - число зубьев центрального зубчатого колеса 1.
Возможны также другие варианты в выборе комбинации размеров зубчатых колес и сателлитов, входящих в зубчатый механизм.
Рассмотрим более простую и наглядную схему механизма, изображенную на фиг.4, 5, объясняющую принцип действия зубчатого механизма на фиг.3. На этих схемах для наглядности «развернем» зубчатые венцы большого центрального зубчатого колеса 12 первой дифференциальной планетарной передачи и центральных зубчатых колес 1 и 2 второй и третьей планетарных передач в линию, представим их в виде зубчатых реек, имеющих возможность вместе с водилом 6 совершать прямолинейное движение. К сателлиту 11 приложено усилие, и он имеет возможность вращения и прямолинейного перемещения.
На фиг.4 изображены линейные скорости и совпадающие с ними перемещения, которые могут возникать в начальный момент движения сателлита 11 первой дифференциальной планетарной передачи зубчатого механизма на фиг.8, до полного устранения зазоров в зубчатых передачах. Скорость перемещения V в точках а, b, с блока зубчатых колес 4 примем одинаковой. При перемещении зубчатых реек и соответственно вращении блока зубчатых колес 7 скорость V2 в точке b1 будет меньше скорости V1 в точке а1. Поэтому водило 6 на фиг.4 и 5 перемещается или на фиг.3 способно повернуться настолько, пока позволяют зазоры в зубчатых передачах, и дальнейшего перемещения или вращения не будет. Происходит заклинивание механизма после того, как будут выбраны все зазоры между зубьями зубчатого механизма, и возникают разнонаправленные силы, препятствующие вращению блока зубчатых колес 7.
На фиг.5 изображены силы, возникающие в зубчатых передачах зубчатого механизма при условии, что к входному звену приложено усилие в виде силы F. Здесь F2 - сила противодействия действию сил F1 и F3, a F1 и F3 - силы, возникающие при делении потока мощности на две части, причем F1=F3, а F2=F1+F3.
Итак, система находится в равновесии при любой приложенной нагрузке. Сумма крутящих моментов (одна степень свободы - вращение), действующих на блок зубчатых колес 7 относительно оси вращения на фиг.5:
Σ M=0; F2×R-F1×2R=0,
где F2 - сила противодействия действию сил F1 и F3;
R - радиус делительных окружностей зубчатых колес меньшего диаметра;
F1 - сила, возникающая при действии силы F, приложенной к входному звену;
2R - радиус делительных окружностей зубчатых колес большего диаметра.
Сумма сил Σ F и крутящих моментов Σ М, действующих на подвижный (плавающий) блок колес 4 относительно оси вращения (две степени свободы - вращение и линейное перемещение):
Σ М=0; F1×2R-F2×R=0;
Σ F=0; F1-F2+F3=0,
где F1 - сила, возникающая при действии силы F, приложенной к входному звену;
2R - радиус делительных окружностей зубчатых колес большего диаметра;
F2 - сила противодействия действию сил F1 и F3;
R - радиус делительных окружностей зубчатых колес меньшего диаметра;
F3 - вторая сила, возникающая при действии силы F, приложенной к входному звену.
В результате колеса блокируются, блокируется и весь зубчатый механизм, а крутящий момент от входного звена полностью передается на ось - вал блока зубчатых колес 7 и далее через подшипниковые опоры - на корпус механизма, который неподвижно закреплен.
Для блокирования или разблокирования колес зубчатого механизма, для создания состояния управляемого заклинивания, необходимо приложить незначительный крутящий момент к управляющему звену Мупр.1, в этом случае - к центральному валу 3 с необходимой нам скоростью ωупр.1, на фиг.6. Также, для нарушения равновесия, можно приложить управляющий крутящий момент Мупр.2 к оси - валу 5 или Мупр.3 к оси - валу 8, вращая его в противоположном направлении вращению входного звена, или приложить сдвигающую силу к водилу 6. Этот управляющий крутящий момент или управляющая сила может изменяться по величине и быть направленным на торможение или, наоборот, на раскручивание входного звена. Это зависит от конструктивного исполнения. Так, например, при увеличении диаметра второго центрального колеса 12 первой дифференциальной планетарной передачи и соответственно сателлитов 11 увеличивается рычаг, действующий на водило 6 второй планетарной передачи, на фиг.1 и 6. И для того, чтобы разблокировать механизм, необходимо приложить дополнительный управляющий крутящий момент, например, к центральному валу Мупр.1 в том же направлении, куда действует приложенный к входному звену крутящий момент.
Так как конструкция предусматривает как полное поглощение нагружающего крутящего момента, так и частичное, имеется возможность уменьшить его до любого необходимого значения, и это зависит от конструктивного исполнения.
Так, при уменьшении диаметра второго центрального колеса 12 первой дифференциальной планетарной передачи и соответственно сателлитов 11 уменьшается рычаг, действующий на водило 6. И для того, чтобы получить управляемое замедление вращения входного звена, необходимо будет, например, к центральному валу, приложить сдерживающий управляющий крутящий момент Мупр.1, по величине зависящий от того, насколько меньшим будет диаметр второго центрального колеса.
Когда водило 13 третьей планетарной передачи не заторможено относительно корпуса механизма 15 и может вращаться, то в этом случае принцип работы зубчатого механизма аналогичен случаю, приведенному выше. Только момент от входного звена водила 9 через зубчатый механизм имеет возможность полностью передаваться на ось - вал 8 и далее на водило 13 третьей планетарной передачи. Через зубчатые передачи крутящий момент и вращательное движение от водила 6 второй планетарной передачи передаются, при соблюдении условия заклинивания, через центральные зубчатые колеса 1 и 2, на которые нагрузка действует разнонаправлено, на водило третьего планетарного ряда 13, которое имеет возможность вращения. Или наоборот, когда вращение и крутящий момент поступают от водила третьей планетарной передачи, так как принцип действия сохраняется как в прямом, так и в обратном направлении. Управление вращением выходного звена, например водила 13 третьего планетарного ряда, осуществляется через звено управления, на которое подается управляющий крутящий момент или сдерживающий управляющий крутящий момент в зависимости от исполнения зубчатого механизма. Управляющим звеном может служить центральный вал 3 или водило 6 второго планетарного ряда.
Реализация изобретения может осуществляться по нескольким направлениям. Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента, установленный в корпус с заблокированным водилом 13 третьей планетарной передачи, может быть использован в качестве грузоподъемного механизма. В этом случае при подъеме груза он работает как редуктор, а при неподвижном нагруженном состоянии, когда груз подвешен или при опускании его, автоматически переводится в состояние поглотителя действующего крутящего момента. А для приведения вала во вращение в ту же сторону, куда действует крутящий момент, достаточно лишь незначительного управляющего крутящего момента, направленного в ту же сторону, например равное усилию для преодоления сил трения в подшипниках качения.
А так как конструкция предусматривает как полное поглощение нагружающего крутящего момента, так и частичное, имеется возможность уменьшить его до любого необходимого значения, и зависит от конструктивного исполнения.
В варианте, где необходим сдерживающий управляющий крутящий момент, он может быть получен, например, при помощи небольшого гидравлического замедлителя или другим известным способом. По сути, этот механизм будет являться усилителем замедления, так как для противодействия большому крутящему моменту на входном звене необходимо будет приложить незначительный, в несколько раз меньший по величине, управляющий крутящий момент.
При использовании механизма в автомобиле в качестве замедлителя - ретардера он поглощает или уменьшает до необходимой величины крутящий момент, действующий на него с одной стороны, например со стороны ведущих колес автомобиля при торможении. А в другую сторону передает крутящий момент от двигателя на привод колес, причем направление вращения не имеет значения. При торможении будет осуществляться совместная работа с моторным тормозом автомобиля. А преобразователь будет выполнять функцию поглотителя крутящего момента, усиливая тормозной момент, возникающий при торможении двигателем в определенное, необходимое нам количество раз. В итоге получается идеальная тормозная система для большегрузных магистральных автомобилей, выполняющих дальние перевозки без системы охлаждения и с высоким коэффициентом полезного действия.
Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента, установленный в корпус с имеющим возможность вращения водилом 13 третьей планетарной передачи, может являться основной составной частью зубчатого вариатора или преобразователя крутящего момента для любого транспортного средства, привода насоса или грузоподъемного механизма. Может использоваться для передачи очень больших крутящих моментов на больших или малых скоростях и применяться в любых грузовых автомобилях и тяжелой технике. При этом для регулирования скорости вращения, в качестве управляющего механизма, действующего на звено управления, может быть использован любой существующий вариатор или коробка передач легкового автомобиля, имеющие кинематическую связь с входным или выходным звеном дифференциального зубчатого механизма преобразования крутящего момента.
Рассмотрим кинематические схемы преобразователя крутящего момента и передаточного отношения (на фиг.7-9). Преобразователь крутящего момента и передаточного отношения содержит дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента с входным/выходным 9, выходным/входным звеном 13 и звеном управления. В зависимости от варианта звено управления выполнено в виде водила 6 (на фиг.7, 9), или центрального зубчатого колеса 12 (на фиг.8). Выходное звено механизма управления 16 кинематически связано зубчатыми колесами 18 со звеном управления дифференциального зубчатого механизма. Механизм управления может быть выполнен в виде электродвигателя или тормоза-замедлителя (на фиг.9), либо в виде механической передачи, кинематически связанной своим входным звеном зубчатыми колесами 17 с входным звеном (на фиг.7) или выходным звеном дифференциального встраиваемого зубчатого механизма (на фиг.8).
Преобразователь крутящего момента и передаточного отношения работает следующим образом. Основную силовую нагрузку получает дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента. На фиг.7 и 9 крутящий момент и вращательное движение получает водило первой дифференциальной планетарной передачи 9. При этом получение управляемого заклинивания в дифференциальном зубчатом механизме и регулирование скорости вращения выходного звена относительно входного осуществляются управляющим механизмом 16, кинематически связанным своим выходным звеном со звеном управления дифференциального зубчатого механизма - водилом 6. На фиг.8 показан пример, когда входным звеном является водило 13 третьей планетарной передачи. Выходным звеном является водило 9 первой дифференциальной планетарной передачи. А звеном управления является второе центральное зубчатое колесо 12 первой дифференциальной планетарной передачи.
В качестве управляющего механизма может быть использован электродвигатель (фиг.9). В качестве управляющего механизма может быть использован также любой существующий вариатор или коробка передач легкового автомобиля, соединенные и имеющие кинематическую связь с входным (фиг.7) или выходным (фиг.8) звеном дифференциального зубчатого механизма преобразования крутящего момента. Коробки передач или вариаторы легковых автомобилей в данном случае будут служить только как механизм управления для создания состояния управляемого заклинивания в дифференциальном зубчатом механизме и регулирования скорости вращения выходного звена преобразователя крутящего момента и передаточного отношения. Механизм управления, получая вращение от звена дифференциального зубчатого механизма преобразователя крутящего момента, изменяя скорость и передавая его на управляющее звено, регулирует скорость вращения выходного звена дифференциального зубчатого механизма. Причем входным, выходным и/или управляющим принимают то или иное звено зубчатого механизма в зависимости от частных случаев применения. При этом, в зависимости от случаев применения преобразователя крутящего момента и передаточного отношения, его входное или выходное звено может быть последовательно соединено с механизмом реверса для обеспечения изменения направления вращения выходного вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБЧАТАЯ ПЕРЕДАЧА ПРЕОБРАЗОВАНИЯ КРУТЯЩЕГО МОМЕНТА С ВОЗМОЖНОСТЬЮ УПРАВЛЯЕМОГО ЗАКЛИНИВАНИЯ | 2012 |
|
RU2523853C2 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| ВАРИАТОР МОМЕНТА НЕФРИКЦИОННОГО ТИПА | 2008 |
|
RU2391584C2 |
| УНИВЕРСАЛЬНАЯ ГОЛОНОМНАЯ ПЕРЕДАЧА С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ КРУТЯЩЕГО МОМЕНТА (ВАРИАНТЫ) | 2001 |
|
RU2192572C1 |
| УНИВЕРСАЛЬНАЯ МЕХАНИЧЕСКАЯ ГОЛОНОМНАЯ ЧАСТЬ ПЕРЕДАЧИ С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ КРУТЯЩЕГО МОМЕНТА (И ЕЕ ВАРИАНТЫ) | 2000 |
|
RU2174076C1 |
| ВАРИАТОР МОМЕНТА | 2010 |
|
RU2445531C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО И НЕПРЕРЫВНОГО ИЗМЕНЕНИЯ КРУТЯЩЕГО МОМЕНТА И СКОРОСТИ ВРАЩЕНИЯ ВЫХОДНОГО ВАЛА В ЗАВИСИМОСТИ ОТ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2398989C2 |
| МОДУЛЬНАЯ АВТОМАТИЧЕСКАЯ СТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2012 |
|
RU2514381C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2006 |
|
RU2298125C1 |
| АВТОМАТИЧЕСКАЯ СТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2384773C1 |







Изобретение относится к области машиностроения и предназначается для использования в транспортных, грузоподъемных механизмах, и станкостроении в качестве встраиваемого управляемого зубчатого механизма. Дифференциальный встраиваемый зубчатый механизм содержит соосные центральный вал (3), входную первую дифференциальную планетарную передачу, два выходных звена которой соединены попарно с двумя входными звеньями второй планетарной передачи, выходное и одно входное звено которой соединены попарно с двумя входными звеньями третьей планетарной передачи с таким же передаточным отношением. На водила (6, 13) второй и третьей планетарных передач установлены двухвенцовые сателлиты (4, 7) с зубчатыми венцами разного диаметра. Сателлиты (4, 7) находятся в зацеплении с общими для них двумя центральными зубчатыми колесами (1, 2) разного диаметра. Преобразователь крутящего момента содержит дифференциальный встраиваемый зубчатый механизм, звено управления и механизм управления с выходным звеном. Изобретение позволяет создавать зубчатые механизмы с возможностью управляемого безопасного заклинивания. 2 н. и 5 з.п. ф-лы, 9 ил.
1. Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента, характеризующийся тем, что содержит центральный вал, входное звено, являющееся входным звеном первой планетарной передачи, два выходных звена которой соединены или объединены попарно с двумя входными звеньями второй планетарной передачи, выходное и одно входное звено которой соединены или объединены попарно с двумя входными звеньями третьей планетарной передачи, с выходным звеном, являющимся выходным звеном зубчатого механизма, причем на водила двух подобных планетарных передач установлены двухвенцовые сателлиты с зубчатыми венцами разного диаметра, находящиеся одновременно в зацеплении с, по меньшей мере, общими для них двумя центральными зубчатыми колесами разного диаметра, при этом, по меньшей мере, одно звено зубчатого механизма, не являющееся входным или выходным, может служить звеном управления.
2. Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента по п.1, отличающийся тем, что звеном управления зубчатого механизма является центральный вал.
3. Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента по п.1, отличающийся тем, что содержит корпус с подшипниковыми опорами.
4. Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента по п.3, отличающийся тем, что между выходным звеном и корпусом установлена муфта сцепления любой известной конструкции.
5. Дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента по п.3, отличающийся тем, что выходное звено выполнено в виде корпусной детали.
6. Преобразователь крутящего момента и передаточного отношения, характеризующийся тем, что содержит дифференциальный встраиваемый зубчатый механизм преобразования крутящего момента с входным, выходным звеном и звеном управления и механизм управления с выходным звеном, кинематически связанным со звеном управления зубчатого механизма, выполненный с возможностью регулирования и изменения скорости вращения своего выходного звена, в виде известного устройства, предпочтительно либо электродвигателя, либо тормоза-замедлителя, либо механической передачи, кинематически связанной своим входным звеном с входным или выходным звеном зубчатого механизма.
7. Преобразователь крутящего момента по п.6, отличающийся тем, что дополнительно содержит механизм реверса.
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ФАЗ ВАЛА | 1996 |
|
RU2176755C2 |
| СПОСОБ РЕМОНТА АНТИКОРРОЗИОННОЙ ИЗОЛЯЦИИ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2183783C1 |
| Способ испытания крупногабаритных объектов, содержащих протяженные кабельные линии, на соответствие требованиям по стойкости к воздействию электромагнитного импульса | 2021 |
|
RU2759494C1 |

