Данное изобретение относится к защитному противоракетному оборудованию воздушных судов. Областью применения настоящего изобретения является обеспечение защиты воздушных судов (пассажирских и транспортных самолетов, самолетов деловой авиации и вертолетов) от управляемых ракет с инфракрасными головками самонаведения переносных ракетных зенитных комплексов.
Известны способы и системы защиты воздушных судов от управляемых переносных ракетных зенитных комплексов, такие как исключение места пуска ракеты, использование специальных самолетов сопровождения, которые могут быть задействованы на эскортировании обычных самолетов на взлете и посадке, обеспечивая им требуемую защиту, использование специализированных беспилотных летательных аппаратов с лазерными комплексами защиты. Но эти способы дороги в реализации и не нашли какого-либо практического применения.
Известны также такие способы и системы защиты, как способ защиты летательных аппаратов от ракет, оснащенных головками самонаведения, путем создания в пространстве между летательным аппаратом и наиболее вероятным направлением возможной ракетной атаки противника ложной цели /1/, техническое решение для защиты воздушных судов от ракет с инфракрасными головками самонаведения, базирующееся на устройстве для пространственного смещения теплового образа объекта, которое содержит расположенные на объекте источник ИК-излучения, формирователи теплового образа объекта, выполненные в виде объемных структур с боковыми отражающими гранями, фокусирующий распределитель в виде вогнутого зеркала, концентраторы лучистого потока в виде плоского зеркала и средство инфракрасной маскировки в виде купола с окнами /2/, способ противоракетной защиты воздушных судов, заключающийся в подрыве боевой части атакующей ракеты на безопасном расстоянии, а именно на расстоянии 3-25 м от корпуса защищаемого воздушного судна индукционным воздействием на электрические цепи неконтактного взрывателя боевой части атакующей ракеты посредством импульсного электромагнитного поля, генерируемого непрерывно или в виде пачек импульсов с периодом повторения 0,5-1,5 мс и несущей частотой 5-100 кГц при потребляемой резонансным контуром излучателя электрической мощности от бортовой сети летательного аппарата 5-25 кВт /3/, также комплекс самозащиты воздушных судов от зенитных управляемых ракет, содержащий блок многозарядных огневых модулей, установленных на раздельных вращающихся платформах на борту летательного аппарата со стороны вероятных атак. Каждый огневой модуль выполнен в виде одноствольного автоматического и/или многоствольного гранатомета с возможностью стрельбы надкалиберными и подкалиберными гранатами. Оптико-электронные средства обнаружения атакующих ракет установлены непосредственно на гранатометах и соединены через бортовой вычислитель с рабочим местом летчика и пиропатронами гранат, установленных в стволах гранатометов. Каждая граната выполнена с возможностью определения относительных угловых координат ракеты при вращении гранаты /4/.
Недостатками указанных устройств и способов их применения, кроме трудностей применения для защиты широкого круга воздушных судов, например пассажирских самолетов, являются отсутствие при их построении точных данных о координатах и направлении движения атакующих ракет и, как следствие, невозможность определения наиболее опасного средства, которому необходимо создать противодействие, и оптимального времени их создания.
Наиболее близкими по технической сущности к заявляемому способу и системе по его реализации, выбранными в качестве прототипов, является способ и система автоматического управления /5/, решающие задачу защиты гражданского самолета от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях оптических помех, и система защиты гражданских воздушных судов /6/.
Сущность способа по прототипу /5/ заключается в том, что определяют факт пуска ракеты, определяют координаты ракеты в каждый момент времени, генерируют импульсное периодическое лазерное излучение, причем диапазон длин волн лазерного излучения лежит в диапазоне чувствительности инфракрасных головок самонаведения, мощность лазерного излучения превышает мощность излучения двигателя самолета в спектральном диапазоне чувствительности инфракрасных головок самонаведения, а частота следования импульсов близка к характерным частотам работы инфракрасных головок самонаведения, и посылают лазерное излучение в точку нахождения ракеты в данный момент времени. Дополнительно принимают отраженное от инфракрасной головки самонаведения лазерное излучение, по уровню мощности этого отраженного лазерного излучения определяют тот факт, что самолет атакует ракета именно с инфракрасной головкой самонаведения, по снижению уровня мощности отраженного лазерного излучения определяют факт срыва наведения на самолет инфракрасной головки самонаведения, после чего прекращают генерации лазерного излучения и передают информации о факте срыва наведения ракеты в наземную систему обеспечения безопасности полетов и в систему объективного контроля самолета. Также вычисляют координаты места пуска ракеты, передают информацию о факте пуска ракеты и о координатах места пуска ракеты в наземную систему обеспечения безопасности полетов и в систему объективного контроля самолета.
Недостатком указанного способа по прототипу /5/ является необходимость генерации лазерного излучения, мощность которого превышает мощность излучения двигателя самолета в спектральном диапазоне чувствительности инфракрасных головок самонаведения.
Без указания необходимости генерации лазерного излучения с плотностью мощности, превышающей плотность мощности теплового излучения двигателя самолета в спектральном диапазоне чувствительности инфракрасных головок самонаведения (т.е. без указания необходимости генерации лазерного излучения в узком телесном угле), и с учетом того, что спектральный диапазон чувствительности инфракрасных головок самонаведения перекрывает значительную часть теплового излучения двигателя самолета, а коэффициент полезного действия инфракрасных лазеров не превышает нескольких процентов, это требование фактически приводит к необходимости иметь на борту дополнительный источник энергии для питания лазера, по мощности сравнимый с мощностью двигателей самолета, что делает реализацию указанного способа практически невозможной.
Кроме того, использование лазерного излучения, модулированного только с частотой следования импульсов, близкой к характерным частотам работы инфракрасных головок самонаведения, неэффективно против инфракрасных головок самонаведения современного и перспективных поколений.
К недостаткам указанного способа следует отнести также отсутствие возможности отражения нескольких ракетных атак, что значительно снижает эффективность системы в случае многократных угроз; отсутствие указаний по обеспечению защиты гражданского самолета от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях оптических помех.
Сущность системы защиты по прототипам /5, 6/ заключается в том, что она содержит размещенные на защищаемом гражданском самолете датчики факта пуска и координат пуска ракеты, приемопередатчик с приводом поворота и оптическим каналом, с выходом которого соединен датчик координат ракеты на траектории ее полета, бортовой вычислитель и генератор лазерного излучения с его пусковым устройством, причем генератор лазерного излучения выполнен фторо-водородно-дейтериевым, бортовой вычислитель выполнен с возможностью обработки сигналов с датчиков факта пуска и координат пуска ракеты для вычисления координат места пуска ракеты и выдачи управляющего сигнала на привод поворота приемопередатчика для ориентирования входа оптического канала приемопередатчика на запущенную ракету, а также с возможностью обработки сигнала с датчика координат ракеты на траектории ее полета для вычисления координат ракеты в данный момент времени и для выдачи пускового сигнала на пусковое устройство генератора лазерного излучения. Бортовой вычислитель выполнен также с возможностью передачи информации о факте пуска ракеты и о координатах места пуска в наземную систему обеспечения безопасности полетов и в систему объективного контроля летательного аппарата. Система дополнительно содержит приемник отраженного лазерного излучения, соединенный с дополнительным выходом оптического канала приемопередатчика и предназначенный для выдачи сигналов на бортовой вычислитель, который выполнен с дополнительной возможностью определения по уровню мощности отраженного от головки самонаведения запущенной ракеты лазерного излучения того факта, что самолет атакует ракета именно с инфракрасной головкой самонаведения, а по снижению уровня мощности отраженного лазерного излучения - факта срыва наведения на самолет инфракрасной головки самонаведения, выдачи на пусковое устройство генератора лазерного излучения сигнала для прекращения генерации лазерного излучения и передачи информации о факте срыва наведения в наземную систему обеспечения безопасности полетов и в систему объективного контроля летательного аппарата. Оптический канал приемопередатчика дополнительно предназначен для передачи излучения из генератора лазерного излучения в направлении запущенной ракеты, датчики факта пуска и координат пуска ракеты являются датчиками ультрафиолетового диапазона, а датчик координат ракеты на траектории ее полета, является узконаправленным датчиком инфракрасного диапазона.
К недостаткам указанного устройства по прототипам /5, 6/ следует отнести:
- излишнее требование необходимости обработки сигнала с датчика координат ракеты на траектории ее полета для вычисления координат ракеты в данный момент времени;
- излишнее требование наличия дополнительного приемника отраженного лазерного излучения, соединенного с дополнительным выходом оптического канала приемопередатчика и предназначенного для выдачи сигналов на бортовой вычислитель;
- ограничения, связанные с выбором генератора лазерного излучения только фторо-водородно-дейтериевым;
- ограничения, связанные с выбором датчиков факта пуска и координат пуска ракеты только датчиками ультрафиолетового диапазона;
- ограничения, связанные с выбором датчика координат ракеты на траектории ее полета только узконаправленным датчиком инфракрасного диапазона;
- технические трудности использования одного оптического канала приемопередатчика для получения инфракрасного излучения от ракеты и для передачи излучения из генератора лазерного излучения в направлении этой ракеты;
- отсутствие связи устройства с пилотажно-навигационным комплексом воздушного судна, что делает труднореализуемой задачу получения реальных угловых координат пуска ракеты для выдачи управляющего сигнала на привод поворота приемопередатчика для ориентирования входа оптического канала приемопередатчика на запущенную ракету, а также делает нереализуемой задачу вычисления реальных координат места пуска для последующей передачи в наземную систему обеспечения безопасности полетов в условиях эволюции летательного аппарата в полете и существующей задержки времени передачи сигнала от датчики факта пуска и координат пуска ракеты в вычислитель;
- отсутствие возможности отражения нескольких ракетных атак, что значительно снижает эффективность устройства в случае многократных угроз;
- отсутствие возможности по обеспечению защиты воздушного судна от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях оптических помех;
- отсутствие в устройстве источника электропитания для его подключения к бортовой сети летательного аппарата и распределения электроэнергии от бортовой сети составным частям устройства, и прежде всего для лазера, что вообще делает проблематичным общее функционирование устройства на борту летательного аппарата;
- отсутствие системы встроенного контроля и системы объективного контроля состояния составных частей устройства, что резко снижает эксплуатационную надежность предложенного устройства;
Каждый из перечисленных недостатков прототипа системы /5, 6/ приводит к снижению работоспособности и надежности работы устройства или делает проблематичным общее функционирование устройства на борту воздушных судов, а также к снижению эффективности обеспечения защиты воздушных судов от управляемых ракет с инфракрасными головками самонаведения переносных ракетных зенитных комплексов в условиях оптических помех.
Задачей настоящего изобретения является обеспечение реализуемости и повышение эффективности способа, и обеспечение работоспособности и повышение надежности и эффективности работы системы защиты воздушных судов (пассажирских и транспортных самолетов и самолетов деловой авиации и вертолетов) от управляемых ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях оптических помех.
Данная задача решается в способе защиты воздушных судов от управляемых ракет с инфракрасными головками самонаведения по настоящему изобретению, заключающемся в том, что определяют факт пуска ракеты, генерируют импульсное периодическое лазерное излучение, причем диапазон длин волн лазерного излучения лежит в диапазоне чувствительности инфракрасных головок самонаведения и посылают лазерное излучение в точку нахождения ракеты в данный момент времени, а также вычисляют координаты места пуска ракеты, передают информацию о факте пуска ракеты и о координатах места пуска ракеты в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна; также принимают отраженное от инфракрасной головки самонаведения лазерное излучение, по уровню мощности этого отраженного лазерного излучения определяют тот факт, что воздушное судно атакует ракета именно с инфракрасной головкой самонаведения, по снижению уровня мощности отраженного лазерного излучения определяют факт срыва наведения на воздушное судно инфракрасной головки самонаведения, после чего прекращают генерации лазерного излучения и передают информации о факте срыва наведения ракеты в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна; отличающемся тем, что генерируют модулированное импульсное периодическое лазерное излучение, причем плотность мощности лазерного излучения превышает плотность мощности теплового излучения двигателя воздушного судна в спектральном диапазоне чувствительности инфракрасных головок самонаведения, а импульсное периодическое лазерное излучение модулируют по частоте повторения пачек импульсов, частоте повторения импульсов в пачке и числе импульсов в пачке, и посылают в точку нахождения ракеты в данный момент времени лазерное излучение, которое при поступлении во входной оптический тракт головки самонаведения и при его дальнейшей обработке в системе наведения ракеты становится источником ложной информации о местонахождении цели и обеспечивает пролет ракеты на безопасном расстоянии от воздушного судна.
Дополнительное отличие способа по настоящему изобретению состоит в том, что определяют факт и координаты пуска нескольких ракет и по выбранным критериям, например в зависимости от времени их появления, посылают лазерное излучение в точку нахождения первой ракеты, после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения первой ракеты посылают лазерное излучение в точку нахождения второй ракеты, а после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения второй ракеты посылают лазерное излучение в точку нахождения третьей и так далее для последующих ракет; обеспечивают селекцию обнаруженных инфракрасных объектов в градации «ракета - не ракета», что обеспечивает защиту воздушного судна от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях оптических помех.
Описанный способ реализуется с помощью системы, которая включает в себя размещенные на воздушном судне датчики факта пуска и координат пуска ракеты, приемопередатчик, бортовой вычислитель и генератор лазерного излучения с его пусковым устройством; бортовой вычислитель выполнен также с возможностью передачи информации о факте пуска ракеты и о координатах места пуска в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна и с дополнительной возможностью определения по уровню мощности отраженного от головки самонаведения запущенной ракеты лазерного излучения того факта, что воздушное судно атакует ракета именно с инфракрасной головкой самонаведения, а по снижению уровня мощности отраженного лазерного излучения - факта срыва наведения на воздушное судно инфракрасной головки самонаведения, выдачи на пусковое устройство генератора лазерного излучения сигнала запуска или прекращения генерации лазерного излучения и передачи информации о факте срыва наведения в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна, отличающейся тем, что датчиками определения факта и координат пуска ракет являются датчики ультрафиолетового или инфракрасного диапазона; датчик слежения за ракетой на траектории ее полета является следящим датчиком инфракрасного диапазона с переменным углом зрения (широко- и узконаправленным) и выполнен с возможностью как для приема инфракрасного излучения от атакующей ракеты, так и для приема отраженного лазерного излучения от головки самонаведения этой ракеты; генератор лазерного излучения выполнен любым лазером, например газовым фторо-водородно-дейтериевым или твердотельным, способным генерировать модулированное импульсное периодическое лазерное излучение с плотностью мощности, превышающей плотность мощности теплового излучения двигателя летательного аппарата в спектральном диапазоне чувствительности инфракрасных головок самонаведения, а диапазон длин волн излучения которого лежит в диапазоне чувствительности инфракрасных головок самонаведения.
Дополнительное отличие системы по настоящему изобретению состоит в том, что генератор лазерного излучения выполнен для обеспечения работы в двух режимах, обеспечивающих как генерацию зондирующих импульсов лазерного излучения с целью определения по уровню мощности отраженного зондирующего импульса лазерного излучения того факта, что воздушное судно атакует ракета именно с инфракрасной головкой самонаведения, а по снижению уровня мощности отраженного зондирующего импульса лазерного излучения определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения, а также генерацию импульсного периодического лазерного излучения для обеспечения срыва наведения головки самонаведения, модулируемого по частоте повторения пачек импульсов, частоте повторения импульсов в пачке и числе импульсов в пачке; приемопередатчик системы содержит микропроцессор и два оптических канала, один из которых является приемным оптическим каналом для приема инфракрасного излучения от атакующей ракеты, соединенным с выходом датчика слежения за ракетой на траектории ее полета и с головным зеркалом с приводом поворота, а другой оптический канал является лазерным каналом, соединенным с выходом генератора лазерного излучения с его пусковым устройством, а также с головным зеркалом приемопередатчика с приводом поворота, являющимся общим для приемного и лазерного оптических каналов и обеспечивающим наведение лазерного излучения на головку самонаведения ракеты; микропроцессор приемопередатчика выполнен с возможностью по предварительному целеуказанию от бортового вычислителя выдачу управляющего сигнала на привод поворота для ориентирования входа головного зеркала оптического канала приемопередатчика на запущенную ракету и обеспечения работы следящего датчика в режиме захвата с широким углом зрения, согласованного с точностью предварительного целеуказания, с последующим переводом работы следящего датчика в режиме сопровождения с узконаправленным углом зрения, что обеспечивает точное сопровождение ракеты на траектории; микропроцессор приемопередатчика выполнен также с возможностью обработки сигнала со следящего датчика и при переходе следящего датчика с режима захвата с широким углом зрения на режим сопровождения с узконаправленным углом зрения обеспечить выдачу сигнала в бортовой вычислитель для подачи команды на пусковое устройство генератора лазерного излучения на генерацию либо зондирующего импульса лазерного излучения, либо импульсного периодического лазерного излучения; бортовой вычислитель выполнен с возможностью обработки сигналов с микропроцессора приемопередатчика для выдачи пускового сигнала на пусковое устройство генератора лазерного излучения при переходе следящего датчика с режима захвата с широким углом зрения на режим сопровождения с узконаправленным углом зрения; микропроцессор приемопередатчика выполнен с возможностью анализа принимаемого инфракрасного излучения для селекции обнаруженных инфракрасных объектов в градации «ракета - не ракета», что обеспечивают защиту воздушного судна от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях ложных оптических помех; бортовой вычислитель выполнен с возможностью обработки сигналов с датчиков факта пуска и координат пуска ракеты и информации от пилотажно-навигационного комплекса воздушного судна для вычисления истинных угловых координат местонахождения ракеты в данный момент времени и выдачи в микропроцессор приемопередатчика предварительного целеуказания об угловых координатах местонахождения ракеты с необходимой точностью для последующего захвата ракеты следящим датчиком, а также вычисления координат пуска ракет на местности для передачи в наземную систему обеспечения безопасности полетов с учетом эволюции воздушного судна за время от начального обнаружения датчиком факта пуска и координат пуска ракеты до выдачи этим датчиком информации в бортовой вычислитель; система содержит блок питания, который обеспечивает подключение системы к бортовой сети электропитания летательного аппарата, распределение электроэнергии от бортовой сети составным частям системы в соответствии с требованиями и их защиту от перегрузок; система содержит систему встроенного контроля, обеспечивающую проверку работоспособности всех составных частей при наземном техническом обслуживании, а также текущего встроенного полетного и принудительного полетного контроля функционирования с выдачей информации о норме функционирования в систему объективного контроля воздушного судна и экипажу, например на пульт-индикатор; вычислитель выполнен с возможностью фиксировать несколько целей по информации от датчиков факта пуска и координат пуска ракеты, по выбранным критериям, например в зависимости от времени появления целей, посылать лазерное излучение в точку нахождения первой ракеты, после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения первой ракеты посылать лазерное излучение в точку нахождения второй ракеты, а после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения второй ракеты посылать лазерное излучение в точку нахождения третьей и так далее для последующих ракет.
Заявленное изобретение поясняется далее со ссылками на прилагаемый чертеж, на котором приведена функциональная схема системы защиты воздушного судна от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов, а также функциональные связи с системами обороняемого воздушного судна.
Система защиты 1 от ракет 2 переносных зенитных ракетных комплексов с инфракрасными головками самонаведения 3 содержит размещенные на защищаемом воздушном судне 4: бортовой блок питания 5 с системой встроенного контроля 6, датчики факта пуска и координат пуска ракет 7, соединенные с системой встроенного контроля 8, приемопередатчик 9 с микровычислителем 10, соединенным с системой встроенного контроля 11, оптическим каналом 12 приема инфракрасного излучения от атакующей ракеты 2 и отраженного лазерного излучения от инфракрасной головки самонаведения 3, с выходом 13 которого соединен датчик 14 слежения за атакующей ракетой 2 на траектории ее полета и приема отраженного лазерного излучения от инфракрасной головки самонаведения 3, соединенный с микровычислителем 10 и с головным зеркалом 15 с приводом поворота 16, оптическим каналом 17 наведения лазерного излучения на выбранный объект с головным зеркалом 15, являющимся общим для приемного 12 и лазерного 17 каналов, генератор лазерного излучения 18 с его пусковым устройством 19 и с системой встроенного контроля 20, соединенный с оптическим каналом 17 наведения лазерного излучения, и бортовой вычислитель 21 с системой встроенного контроля 22. Первая группа входов 23 бортового вычислителя 21 соединена с выходами датчиков факта пуска и координат пуска 7 и с выходами системы встроенного контроля 8 датчиков факта пуска и координат пуска 7, вторая группа входов 24 бортового вычислителя 21 соединена с микровычислителем 10, соединенным с выходами системы встроенного контроля 11 приемопередатчика 9, третья группа входов 25 бортового вычислителя 21 соединена с выходами системы встроенного контроля 20 генератора лазерного излучения 18, четвертая группа входов 26 бортового вычислителя 21 соединена с выходами бортового блока питания 5 и системой встроенного контроля 6 бортового блока питания 5, пятая группа входов 27 бортового вычислителя 21 соединена с выходами пилотажно-навигационного комплекса 41 воздушного судна. Первый выход 28 бортового вычислителя 21 соединен с микровычислителем 10, второй выход 29 бортового вычислителя 21 соединен с пусковым устройством 19 генератора лазерного излучения 18, третий выход 30 бортового вычислителя 21 соединен с системой объективного контроля 43 воздушного судна 4, четвертый выход 31 бортового вычислителя 21 соединен с системой связи самолета с наземными службами 44 воздушного судна 4, пятый выход 32 бортового вычислителя 21 соединен с пультом-индикатором 42 воздушного судна 4. Первый вход 33 бортового блока питания 5 соединен с бортовой системой электроснабжения воздушного судна 40. Первый выход 34 бортового блока питания 5 соединен с датчиками факта пуска и координат пуска ракет 7, второй выход 35 бортового блока питания 5 соединен с приемопередатчиком 9, третий выход бортового 36 блока питания 5 соединен с генератором лазерного излучения 18, четвертый выход 37 бортового блока питания 5 соединен с входом 26 бортового вычислителя 21. Выход 38 генератора лазерного излучения 18 соединен с входом 39 лазерного канала 17.
Способ защиты воздушных судов от управляемых ракет с инфракрасными головками самонаведения переносных ракетных зенитных комплексов по настоящему изобретению реализуется в представленной системе следующим образом.
При подготовке воздушного судна к вылету на бортовой блок питания 5 подается электропитание от бортовой системы электроснабжения 40 и от бортового блока питания 5 подается электропитание на датчики факта пуска и координат пуска ракет 7, приемопередатчик 9, генератор лазерного излучения 18 и бортовой вычислитель 21, после чего по команде бортового вычислителя 21 происходит тестирование работоспособности системы защиты 1 с помощью систем встроенного контроля 6, 8, 11, 20 и 22 с выдачей информации о работоспособности системы или об отказах в оперативную память бортового вычислителя 21, систему объективного контроля 43 и экипажу, например на пульт-индикатор 42, воздушного судна 4. При запуске по летящему воздушному судну 4 ракеты 2 с инфракрасной головкой самонаведения 3 размещенные на воздушном судне 4 датчики факта пуска и координат пуска ракет 7 фиксируют излучение двигателя (инфракрасное или ультрафиолетовое) стартующей ракеты 2. Сигналы с этих датчиков подаются на первую группу входов 23 вычислителя 21 для вычисления координат пуска ракеты с учетом информации от пилотажно-навигационного комплекса воздушного судна 41, получаемой через группу входов 27 вычислителя 21, вычисляют реальные угловые координаты пуска ракеты и координаты пуска ракеты на местности с учетом эволюции воздушного судна 4 за время от начального обнаружения датчиками факта пуска и координат пуска ракеты 7 до выдачи этими датчиками информации в вычислитель 21 и передают через выходы 30, 31 и 32 бортового вычислителя 21 информацию о факте и координатах пуска на местности экипажу (например на пульт-индикатор 42), в систему объективного контроля 43 и систему связи 44 воздушного судна 4 с наземными службами. Информация о факте пуска и об угловых координатах места пуска передается также из вычислителя 21 через выход 28 в микропроцессор 10 приемопередатчика 9 для формирования предварительного целеуказания с необходимой точностью об угловых координатах пуска ракеты 2 для последующего захвата ракеты 2 следящим датчиком 14. Микропроцессор 10 приемопередатчика 9 выдает сигнал на привод поворота 16 приемопередатчика 9 управляющего сигнала для ориентирования головного зеркала 15 приемного оптического канала 12 приемопередатчика 9 на запущенную ракету 2, приема инфракрасного излучения от ракеты 2 и обеспечения работы следящего датчика 14 в режиме захвата с широким углом зрения, согласованного с точностью предварительного целеуказания. После получения подтверждения о захвате атакующей ракеты от следящего датчика 14 микропроцессор 10 приемопередатчика 9 выдает команду для обеспечения работы следящего датчика 14 в режиме сопровождения с узконаправленным углом зрения и по информации от следящего датчика 14 выдает команды на привод поворота 16 для постоянного ориентирования головного зеркала 15 на атакующую ракету 2 без вычисления координат ракеты в каждый момент времени. Для обеспечения работы системы 1 в условиях ложных оптических помех микропроцессор 10 приемопередатчика 9 проводит анализ принимаемого следящим датчиком 14 инфракрасного излучения для селекции обнаруженных инфракрасных объектов в градации «ракета - не ракета» и обеспечивает выдачу сигнала в бортовой вычислитель 21 о начале режима сопровождения и о результатах селекции обнаруженных инфракрасных объектов. Бортовой вычислитель 21 после получения сигналов с микропроцессора 10 приемопередатчика 9 о ложной оптической помехе выдает команду о прекращении режима сопровождения. Бортовой вычислитель 21 после получения сигналов с микропроцессора 10 приемопередатчика 9 о начале режима сопровождения и подтверждения факта атаки ракетой выдает пусковой сигнал на пусковое устройство 19 генератора лазерного излучения 18, который обеспечивает по определенному алгоритму генерацию зондирующих одиночных импульсов и импульсного периодического лазерного излучения, модулируемого по частоте повторения пачек импульсов, частоте повторения импульсов в пачке и числе импульсов в пачке. Лазерное излучение по выходу 38 генератора лазерного излучения 18 подается через вход 39 в оптический канал 17 наведения лазерного излучения и через головное зеркало 15 посылается в точку нахождения ракеты в данный момент времени. Микропроцессор 10 приемопередатчика 9 при получении от следящего датчика 14 через головное зеркало 15 отраженного сигнала от первой группы зондирующих импульсов по уровню этого отраженного сигнала выдает информацию в вычислитель 21 о том, что атакует ракета с инфракрасной головкой самонаведения или ракета не с инфракрасной головкой самонаведения. Бортовой вычислитель 21 после получения сигналов с микропроцессора 10 приемопередатчика 9 об атаке ракеты с инфракрасной головкой самонаведения выдает пусковой сигнал на пусковое устройство 19 генератора лазерного излучения 18 о генерации импульсного периодического лазерного излучения, модулируемого по частоте повторения пачек импульсов, частоте повторения импульсов в пачке и числе импульсов в пачке с чередованием зондирующих одиночных импульсов, которое при поступлении во входной оптический тракт головки самонаведения 3 и при его дальнейшей обработке в системе наведения ракеты 2 становится источником ложной информации о местонахождении цели и обеспечивает пролет ракеты на безопасном расстоянии от воздушного судна. Микропроцессор 10 приемопередатчика 9 при получении от следящего датчика 14 через головное зеркало 15 отраженного сигнала от последующих групп зондирующих импульсов по снижению уровня мощности отраженного зондирующего импульса лазерного излучения определяет факт срыва наведения на воздушное судно инфракрасной головки самонаведения и выдает информацию о срыве наведения в бортовой вычислитель 21. Бортовой вычислитель 21 после получения сигналов с микропроцессора 10 приемопередатчика 9 о срыве наведения ракеты подает через выход 29 на пусковое устройство 19 генератора лазерного излучения 18 команду о прекращении генерации лазерного излучения, через выход 24 подает в микропроцессор 10 приемопередатчика 9 команду для формирования предварительного целеуказания о координатах пуска следующей атакующей ракеты с необходимой точностью для последующего захвата ракеты следящим датчиком, а через выходы 30, 31 и 32 бортового вычислителя 21 информацию о срыве атаки ракеты с инфракрасной головкой самонаведения экипажу (например, на пульт-индикатор 42), в систему объективного контроля 43 и систему связи 44 воздушного судна 4 с наземными службами.
На предприятии совместно с предприятиями-соисполнителями разработаны опытные образцы лазерной системы защиты воздушных судов от управляемых ракет с инфракрасными головками самонаведения переносных ракетных зенитных комплексов и проведены их наземные испытания, в том числе с применением методов математического и полунатурного моделирования, и летные испытания, подтвердившие высокую эффективность лазерной системы защиты, обоснованность состава и алгоритмов ее работы.
Литература
1. МПК F41J 2/02, F41H 11/02; №2141094; опубликовано 10.11.99. Патентообладатель - Государственный высокогорный научно-исследовательский испытательный центр авиационной техники и вооружения. Способ защиты летательных аппаратов от ракет, оснащенных головками самонаведения.
2. МПК B64D 7/00; F41H 11/02; F41J 2/02; №2347720; опубликовано 27.02.09. Патентообладатель - Общество с ограниченной ответственностью "СПЕЦТЕХ" (RU). Система защиты летательных аппаратов от управляемого оружия с инфракрасными головками самонаведения.
3. МПК F41H 11/02; №2298760; опубликовано 10.05.07. Патентообладатель - Институт теплофизики экстремальных состояний Объединенного института высоких температур Российской академии наук (ИТЭС ОИВТ РАН) (RU). Способ противоракетной защиты летательного аппарата.
4. МПК F41H 11/02; №2336486; опубликовано 20.10.08. Патентообладатель - Тикменков В.Н., Колесник В.Н. Комплекс самозащиты летательных аппаратов от зенитных управляемых ракет.
5. G06F 165:00 F41H 11/02. №2238510; опубликовано 20.10.04. Способ и система автоматического управления. Патентообладатель - ЗАО "СТИВТ".
6. МПК F41H 11/02 (2006.01); №2321817; опубликовано 10.04.08. Патентообладатель - "РФЯЦ-ВНИИЭФ". Система защиты гражданских воздушных судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ГРАЖДАНСКИХ ВОЗДУШНЫХ СУДОВ | 2006 |
|
RU2321817C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2003 |
|
RU2238510C1 |
| УСТРОЙСТВО ИНДИВИДУАЛЬНОЙ ЗАЩИТЫ ЛЕТАТЕЛЬНОГО АППАРАТА ОТ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИЧЕСКИМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2008 |
|
RU2378603C1 |
| Способ лазерной защиты воздушного судна | 2023 |
|
RU2805094C1 |
| Способ защиты воздушных судов от ракет с ИК головками самонаведения (варианты) | 2016 |
|
RU2658513C2 |
| СПОСОБ ЗАЩИТЫ ВОЗДУШНОГО СУДНА ОТ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИЧЕСКИМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2819940C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ВОЗДУШНОГО СУДНА ОТ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИЧЕСКИМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2019 |
|
RU2726351C1 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2713546C2 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2002 |
|
RU2241193C2 |
| Способ защиты летательных аппаратов от ракет, оснащенных головками самонаведения с матричным фотоприемным устройством | 2016 |
|
RU2629464C1 |
Для защиты воздушного судна от управляемых ракет с инфракрасными головками самонаведения определяют факт пуска одной или нескольких ракет, генерируют лазерное излучение с плотностью, превышающей плотность мощности теплового излучения двигателя воздушного судна, и посылают в точку нахождения ракеты, благодаря чему ракета получает ложную информацию о местонахождении цели. Повторяют вышеуказанное для каждой последующей ракеты. Повышается эффективность защиты воздушного судна. 2 н.п. ф-лы, 1 ил.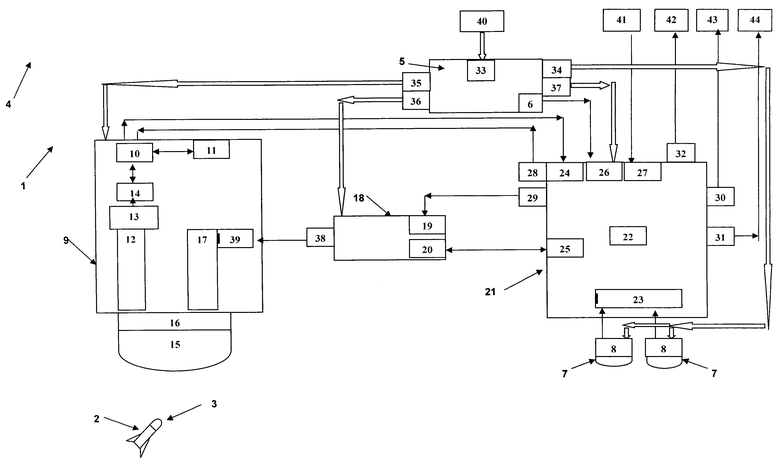
1. Способ защиты воздушных судов от управляемых ракет с инфракрасными головками самонаведения переносных ракетных зенитных комплексов, заключающийся в том, что определяют факт пуска ракеты, генерируют импульсное периодическое лазерное излучение, причем диапазон длин волн лазерного излучения лежит в диапазоне чувствительности инфракрасных головок самонаведения, и посылают лазерное излучение в точку нахождения ракеты в данный момент времени, а также вычисляют координаты места пуска ракеты, передают информацию о факте пуска ракеты и о координатах места пуска ракеты в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна; также принимают отраженное от инфракрасной головки самонаведения лазерное излучение, по уровню мощности этого отраженного лазерного излучения определяют тот факт, что воздушное судно атакует ракета именно с инфракрасной головкой самонаведения, по снижению уровня мощности отраженного лазерного излучения определяют факт срыва наведения на воздушное судно инфракрасной головки самонаведения, после чего прекращают генерации лазерного излучения и передают информации о факте срыва наведения ракеты в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна, отличающийся тем, что генерируют модулированное импульсное периодическое лазерное излучение, причем плотность мощности лазерного излучения превышает плотность мощности теплового излучения двигателя воздушного судна в спектральном диапазоне чувствительности инфракрасных головок самонаведения, а импульсное периодическое лазерное излучение модулируют по частоте повторения пачек импульсов, частоте повторения импульсов в пачке и числе импульсов в пачке, и посылают в точку нахождения ракеты в данный момент времени лазерное излучение, которое при поступлении во входной оптический тракт головки самонаведения и при его дальнейшей обработке в системе наведения ракеты становится источником ложной информации о местонахождении цели и обеспечивает пролет ракеты на безопасном расстоянии от воздушного судна; определяют факт и координаты пуска нескольких ракет и по выбранным критериям, например в зависимости от времени их появления, посылают лазерное излучение в точку нахождения первой ракеты, после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения первой ракеты посылают лазерное излучение в точку нахождения второй ракеты, а после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения второй ракеты посылают лазерное излучение в точку нахождения третьей и так далее для последующих ракет; проводят селекцию обнаруженных инфракрасных объектов в градации «ракета - не ракета», что обеспечивает защиту воздушного судна от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях оптических помех.
2. Система защиты воздушных судов от управляемых ракет с инфракрасными головками самонаведения переносных ракетных зенитных комплексов, содержащая размещенные на воздушном судне датчики факта пуска и координат пуска ракеты, приемопередатчик, бортовой вычислитель и генератор лазерного излучения с его пусковым устройством; бортовой вычислитель выполнен также с возможностью передачи информации о факте пуска ракеты и о координатах места пуска в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна и с дополнительной возможностью определения по уровню мощности отраженного от головки самонаведения запущенной ракеты лазерного излучения того факта, что воздушное судно атакует ракета именно с инфракрасной головкой самонаведения, а по снижению уровня мощности отраженного лазерного излучения - факта срыва наведения на воздушное судно инфракрасной головки самонаведения, выдачи на пусковое устройство генератора лазерного излучения сигнала запуска или прекращения генерации лазерного излучения и передачи информации о факте срыва наведения в наземную систему обеспечения безопасности полетов и в систему объективного контроля воздушного судна, отличающаяся тем, что датчиками определения факта и координат пуска ракет являются датчики ультрафиолетового или инфракрасного диапазона; датчик слежения за ракетой на траектории ее полета является следящим датчиком инфракрасного диапазона с переменным углом зрения (широко- и узконаправленным) и выполнен с возможностью как для приема инфракрасного излучения от атакующей ракеты, так и для приема отраженного лазерного излучения от головки самонаведения этой ракеты; генератор лазерного излучения выполнен любым лазером, например газовым фторо-водородно-дейтериевым или твердотельным, способным генерировать модулированное импульсное периодическое лазерное излучение с плотностью мощности, превышающей плотность мощности теплового излучения двигателя летательного аппарата в спектральном диапазоне чувствительности инфракрасных головок самонаведения, а диапазон длин волн излучения которого лежит в диапазоне чувствительности инфракрасных головок самонаведения; генератор лазерного излучения выполнен для обеспечения работы в двух режимах, обеспечивающих как генерацию зондирующих импульсов лазерного излучения с целью определения по уровню мощности отраженного зондирующего импульса лазерного излучения того факта, что воздушное судно атакует ракета именно с инфракрасной головкой самонаведения, а по снижению уровня мощности отраженного зондирующего импульса лазерного излучения определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения, а также генерацию импульсного периодического лазерного излучения для обеспечения срыва наведения головки самонаведения, модулируемого по частоте повторения пачек импульсов, частоте повторения импульсов в пачке и числе импульсов в пачке; приемопередатчик системы содержит микропроцессор и два оптических канала, один из которых является приемным оптическим каналом для приема инфракрасного излучения от атакующей ракеты, соединенным с выходом датчика слежения за ракетой на траектории ее полета и с головным зеркалом с приводом поворота, а другой оптический канал является лазерным каналом, соединенным с выходом генератора лазерного излучения с его пусковым устройством, а также с головным зеркалом приемопередатчика с приводом поворота, являющимся общим для приемного и лазерного оптических каналов и обеспечивающим наведение лазерного излучения на головку самонаведения ракеты; микропроцессор приемопередатчика выполнен с возможностью по предварительному целеуказанию от бортового вычислителя выдачу управляющего сигнала на привод поворота для ориентирования входа головного зеркала оптического канала приемопередатчика на запущенную ракету и обеспечения работы следящего датчика в режиме захвата с широким углом зрения, согласованного с точностью предварительного целеуказания, с последующим переводом работы следящего датчика в режиме сопровождения с узконаправленным углом зрения, что обеспечивает точное сопровождение ракеты на траектории; микропроцессор приемопередатчика выполнен также с возможностью обработки сигнала со следящего датчика и при переходе следящего датчика с режима захвата с широким углом зрения на режим сопровождения с узконаправленным углом зрения обеспечить выдачу сигнала в бортовой вычислитель для подачи команды на пусковое устройство генератора лазерного излучения на генерацию либо зондирующего импульса лазерного излучения, либо импульсного периодического лазерного излучения; бортовой вычислитель выполнен с возможностью обработки сигналов с микропроцессора приемопередатчика для выдачи пускового сигнала на пусковое устройство генератора лазерного излучения при переходе следящего датчика с режима захвата с широким углом зрения на режим сопровождения с узконаправленным углом зрения; микропроцессор приемопередатчика выполнен с возможностью анализа принимаемого инфракрасного излучения для селекции обнаруженных инфракрасных объектов в градации «ракета - не ракета», что обеспечивают защиту воздушного судна от ракет с инфракрасными головками самонаведения переносных зенитных ракетных комплексов в условиях ложных оптических помех; бортовой вычислитель выполнен с возможностью обработки сигналов с датчиков факта пуска и координат пуска ракеты и информации от пилотажно-навигационного комплекса воздушного судна для вычисления истинных угловых координат местонахождения ракеты в данный момент времени и выдачи в микропроцессор приемопередатчика предварительного целеуказания об угловых координатах местонахождения ракеты с необходимой точностью для последующего захвата ракеты следящим датчиком, а также вычисления координат пуска ракет на местности для передачи в наземную систему обеспечения безопасности полетов с учетом эволюции воздушного судна за время от начального обнаружения датчиком факта пуска и координат пуска ракеты до выдачи этим датчиком информации в бортовой вычислитель; система содержит блок питания, который обеспечивает подключение системы к бортовой сети электропитания летательного аппарата, распределение электроэнергии от бортовой сети составным частям системы в соответствии с требованиями и их защиту от перегрузок; система содержит систему встроенного контроля, обеспечивающую проверку работоспособности всех составных частей при наземном техническом обслуживании, а также текущего встроенного полетного и принудительного полетного контроля функционирования с выдачей информации о норме функционирования в систему объективного контроля воздушного судна и экипажу, например на пульт-индикатор; вычислитель выполнен с возможностью фиксировать несколько целей по информации от датчиков факта пуска и координат пуска ракеты, по выбранным критериям, например в зависимости от времени появления целей, посылать лазерное излучение в точку нахождения первой ракеты, после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения первой ракеты посылать лазерное излучение в точку нахождения второй ракеты, а после определения факта срыва наведения на воздушное судно инфракрасной головки самонаведения второй ракеты посылать лазерное излучение в точку нахождения третьей и так далее для последующих ракет.
| СПОСОБ ЗАЩИТЫ ГРУППОВОГО ОБЪЕКТА ОТ ВЫСОКОТОЧНОГО ОРУЖИЯ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2401411C2 |
| СПОСОБ ПРОСТРАНСТВЕННОГО СМЕЩЕНИЯ ТЕПЛОВОГО ОБРАЗА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291374C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2003 |
|
RU2238510C1 |
| СПОСОБ ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ РАКЕТ, ОСНАЩЕННЫХ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1998 |
|
RU2141094C1 |
| US 20020097390 A1, 25.07.2002 | |||
| US 5600434 A, 04.02.1997 | |||
| JP 2008070059 A, 27.03.2008 | |||

