Изобретение относится к области противодействия высокоточному оружию (ВТО) и может быть использовано для защиты групповых объектов.
Одним из известных способов противодействия высокоточному оружию с лазерной системой наведения является дезориентация системы наведения ВТО путем подсветки ложной цели (ЛЦ) лазерным лучом, аналогичным лучу подсвета цели [1] с.22. При этом способе противодействия, в случае обнаружения подсветки защищаемого объекта лазерным лучом противника, ложную цель, удаленную от защищаемого объекта на определенное расстояние, подсвечивают аналогичным по параметрам генерации и интенсивности излучения лазерным лучом. При этом ВТО наводится примерно в среднюю точку между защищаемым объектом и ложной целью. Основным недостатком этого способа является то, что расстояние между защищаемым объектом и ложной целью не может быть большим. Это связано с тем, что почти до конца полета ВТО оба объекта должны находиться в поле зрения головки самонаведения. В противном случае выбирается один из этих объектов по случайному закону и на него наводится оружие. То есть при большем разносе защищаемого объекта и ложной цели вероятность поражения защищаемого объекта будет составлять 50%. Для защиты групповых объектов данный способ оказывается практически неприменим, так как при уведении ВТО от защищаемого объекта на расстояние больше радиуса поражения данный объект будет защищен, но при этом могут быть уничтожены другие объекты, входящие в состав группового объекта.
Наиболее близким предлагаемому является способ, заключающийся в подсветке ложной цели для перенацеливания на нее ВТО [1] с.19. При этом способе, в случае обнаружения подсветки защищаемого объекта лазерным лучом противника, ложную цель, удаленную на безопасное расстояние, но находящуюся в зоне обзора головки самонаведения, подсвечивают аналогичным по параметрам генерации, но гораздо большей интенсивности (по сравнению с интенсивностью излучения, отраженного от пятна подсвета цели) лазерным лучом. При интенсивности луча подсвета ложной цели, большей в пять и более раз, ВТО гарантированно перенацеливается на ложную цель. Отклонение ВТО от защищаемого объекта при этом может быть в 2 раза больше, чем при первом способе, однако и в этом случае расстояние между защищаемым объектом и ложной целью не может быть настолько большим, чтобы увести ВТО за пределы группового объекта. Это объясняется тем, что, как и в первом способе, оба объекта должны находиться в довольно узком поле зрения головки самонаведения. Данный способ может быть применен только для защиты объектов, расположенных по периметру группового объекта или вблизи таких мест, где взрыв уводимого боеприпаса не приведет к поражению других защищаемых объектов.
Задачей настоящего изобретения является обеспечение гарантированной защиты всех защищаемых объектов в составе группового объекта от ВТО с лазерной системой наведения.
Поставленная задача достигается тем, что, ложную цель располагают в безопасном месте за пределами или внутри группового объекта вне зоны обзора головки самонаведения таким образом, чтобы при взрыве уводимого боеприпаса не был поврежден ни один из защищаемых объектов и, в случае обнаружения подсветки защищаемого объекта лазерным лучом противника, на самом подсвеченном защищаемом объекте или в непосредственной близости от него формируют ложное пятно подсвета с излучением, аналогичным по параметрам генерации лазерному лучу подсвета противника, но гораздо большей интенсивности, затем перемещают сформированное пятно подсвета от защищаемого объекта на ложную цель.
В первом варианте способа технический результат достигается тем, что обнаруживают подсветку одного из защищаемых объектов в составе группового объекта лазерным лучом противника и подсвечивают расположенную в безопасном месте ложную цель лазерным лучом с параметрами генерации, аналогичным параметрам генерации лазерного луча подсвета противника, но большей интенсивности излучения. После обнаружения подсветки одного из защищаемых объектов в составе группового объекта лазерным лучом противника, аналогичным по параметрам генерации, но гораздо большей интенсивности лазерным лучом, подсвечивают сначала защищаемый объект, а затем перемещают пятно подсвета с защищаемого объекта на ложную цель. При этом головка самонаведения ВТО и система подсвета цели противника будут отслеживать движение более яркого пятна подсвета и перемещаться в направлении ложной цели. Лазер подсвета защищаемого объекта располагают на высоко поднятом основании, например на высокой мачте, чтобы можно было подсветить как защищаемый объект, так и ложную цель.
При условии, что расстояния от имитационного лазера до защищаемого объекта и до ложной цели одинаковы, дальность уведения  можно вычислить по формуле
можно вычислить по формуле
где h - высота подвеса имитационного лазера;
α - угол отклонения луча имитационного лазера от вертикали при подсветке защищаемого объекта или ложной цели.
Во втором варианте способа технический результат достигается тем, что обнаруживают подсветку одного из защищаемых объектов в составе группового объекта лазерным лучом противника и подсвечивают расположенную в безопасном месте ложную цель лазерным лучом с параметрами генерации, аналогичным параметрам генерации лазерного луча подсвета противника, но большей интенсивности излучения. Между защищаемыми объектами в составе группового объекта и ложной целью размещают цепочки имитационных лазеров с излучением, идентичным лазерному лучу подсвета цели и направленным вертикально вверх. После обнаружения подсветки одного из защищаемых объектов в составе группового объекта лазерным лучом противника включают n ближайших к защищаемому объекту имитационных лазеров, где n≥2, для формирования пятна подсвета, после чего поочередно включают следующий имитационный лазер в направлении ложной цели и выключают имитационный лазер со стороны защищаемого объекта для перемещения пятна подсвета на ложную цель.
Расстояние между имитационными лазерами Lё выбирают таким, чтобы в поле зрения головки самонаведения ударной ракеты полностью попадало ложное пятно подсвета, создаваемое группой из n+2 имитационных лазеров.
Это расстояние определяется по формуле
где  - минимальная дальность пуска ударной ракеты;
- минимальная дальность пуска ударной ракеты;
t - текущее время полета ударной ракеты;
 - скорость ударной ракеты;
- скорость ударной ракеты;
β - угол поля зрения головки самонаведения.
Для определения Lё изменяем t от 0 до  где
где  - время противодействия, то есть время перемещения пятна подсвета от защищаемого объекта на ложную цель. Для эффективной защиты время противодействия td' должно быть меньше времени полета ударной ракеты tp до цели, где
- время противодействия, то есть время перемещения пятна подсвета от защищаемого объекта на ложную цель. Для эффективной защиты время противодействия td' должно быть меньше времени полета ударной ракеты tp до цели, где
Поскольку зона обзора головки самонаведения непрерывно уменьшается при приближении ракеты к цели, что видно из выражения для малой оси эллипса обзора
то расстояние между имитационными лазерами должно быть или минимальным (вычисленным при t=td') и одинаковым по всей длине цепочки, или уменьшающимся по мере приближения по цепочке к ложной цели.
Количество первоначально включаемых имитационных лазеров n выбирают исходя из требований к допустимым колебаниям мощности в формируемом ложном пятне подсвета при включении-выключении лазеров. Минимально необходимым является n=2, при этом колебание мощности составляет 33,3% относительно мощности излучения n+1 лазеров. При увеличении количества лазеров в группе колебание мощности уменьшается, но при этом увеличивается общее количество имитационных лазеров в цепочке, что приводит к значительному усложнению системы управления.
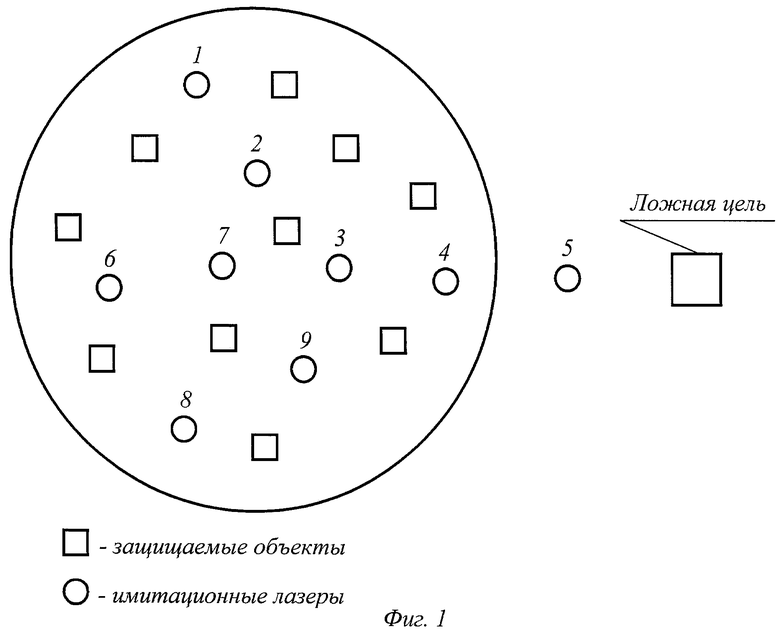
Внутри группового объекта, в зависимости от места расположения подсвеченного защищаемого объекта, могут быть организованы следующие цепочки (фиг.1): имитационные лазеры 1, 2, 3, 4, 5, ЛЦ; имитационные лазеры 6, 7, 3, 4, 5, ЛЦ; имитационные лазеры 8, 9, 3, 4, 5, ЛЦ. При этом в цепочках поочередно включают только те имитационные лазеры, которые расположены между подсвеченным защищаемым объектом и ложной целью. Для защиты групповых объектов, занимающих большую площадь, могут быть организованы самостоятельные цепочки имитационных лазеров с выводом ВТО на несколько ложных целей. Подсветку ложной цели лазерным лучом целесообразно осуществлять с высоко поднятого основания, например с какой-нибудь мачты.
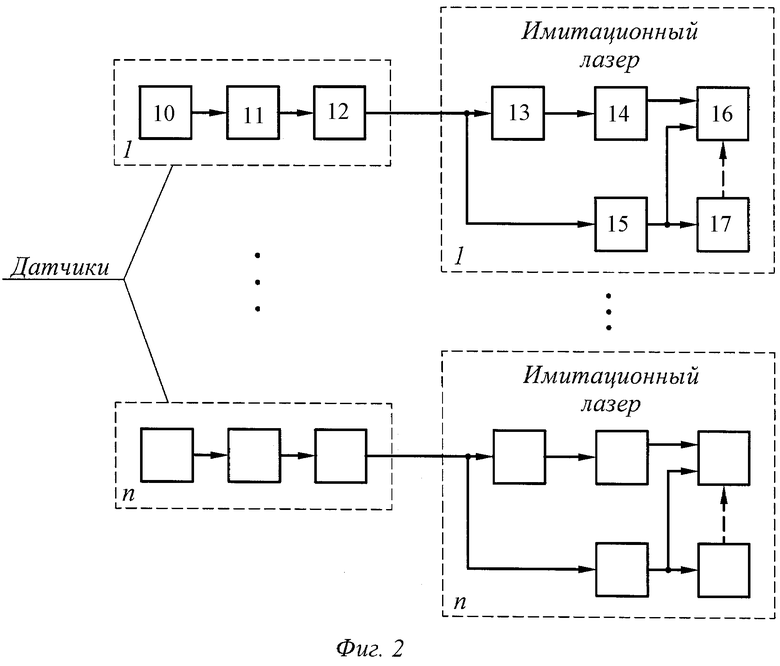
Чертежи изображают: фиг.1 - схема защиты объекта для второго варианта способа; фиг.2 - устройство для реализации первого варианта способа; фиг.3 - устройство для реализации второго варианта способа.
Устройство для реализации первого варианта способа для случая, когда количество имитационных лазеров равно количеству защищаемых объектов, приведено на фиг.2, где обозначено:
10 - фотоприемник лазерного излучения;
11 - демодулятор;
12 - усилитель;
13 - запоминающее устройство;
14 - модулятор;
15 - детектор;
16 - лазер;
17 - устройство поворота лазера.
Датчики лазерного излучения, количество которых соответствует количеству защищаемых объектов в составе группового объекта, включают в себя фотоприемник 10, демодулятор 11 и усилитель 12. Подсветка защищаемого объекта лазерным лучом противника фиксируется таким датчиком, сигнал с которого в виде низкочастотного сигнала модуляции лазерного излучения, полученного после демодулятора 11 и усиленного усилителем 12, поступает на вход соответствующего имитационного лазера, состоящего из запоминающего устройства 13, модулятора 14, детектора 15, лазера 16 и устройства поворота лазера 17. Сигнал поступает в запоминающее устройство 13, где запоминается низкочастотный сигнал модуляции лазерного излучения подсвеченного защищаемого объекта, и на детектор 15, на выходе которого формируется сигнал для включения лазера 16 и устройства поворота лазера 17. С выхода запоминающего устройства 13 низкочастотный сигнал модуляции лазерного излучения подается на модулятор 14, который в соответствии с этим сигналом управляет излучением лазера 16.
Благодаря использованию запоминающего устройства 13, излучение имитационных лазеров будет идентичным с излучением, отраженным от подсвеченного объекта на протяжении всего времени перемещения пятна подсвета с защищаемого объекта на ложную цель, несмотря на то, что после смещения пятна подсвета с защищаемого объекта сигнал с демодулятора 11 больше поступать не будет.
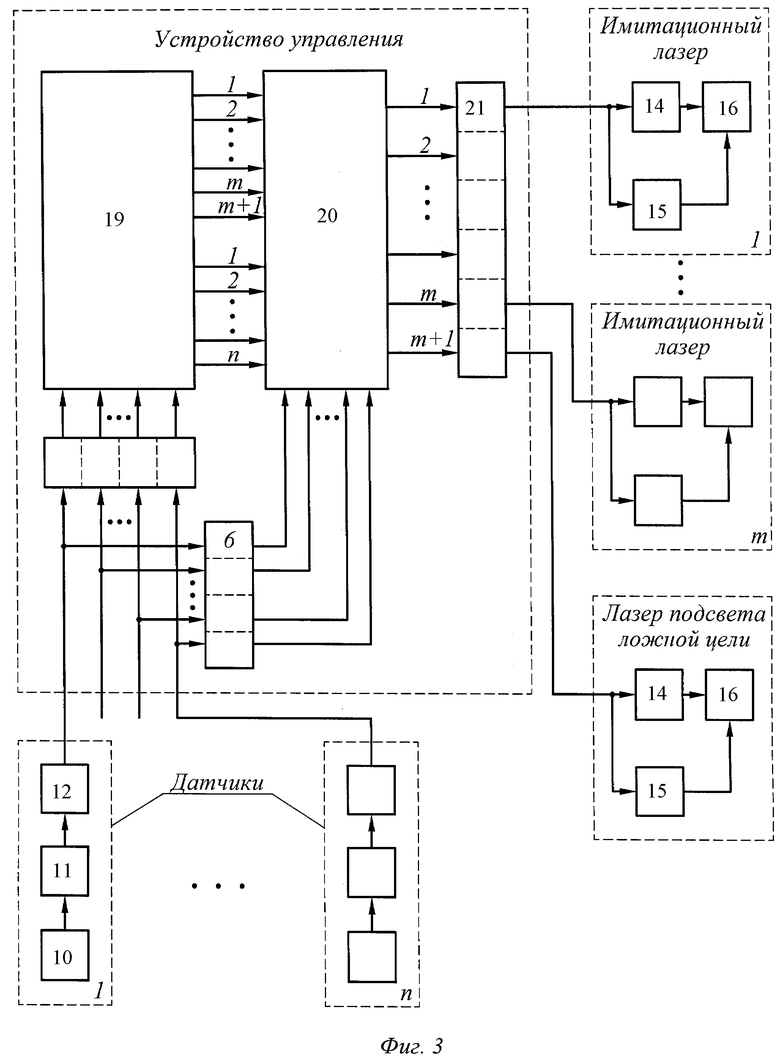
Устройство для реализации второго варианта способа приведено на фиг.3, где обозначено:
10 - фотоприемник лазерного излучения;
11 - демодулятор;
12 - усилитель;
13 - запоминающие устройства по числу датчиков лазерного излучения;
14 - модулятор;
15 - детектор;
16 - лазер;
18 - детекторы по числу датчиков лазерного излучения;
19 - схема управления очередностью засветки имитационных лазеров;
20 - коммутатор;
21 - усилители.
Датчики лазерного излучения, количество которых соответствует количеству защищаемых объектов в составе группового объекта, включают в себя фотоприемник 10, демодулятор 11 и усилитель 12. Подсветка защищаемого объекта лазерным лучом противника фиксируется таким датчиком, сигнал с которого в виде низкочастотного сигнала модуляции лазерного излучения, полученного после демодулятора 11 и усиленного усилителем 12, поступает в устройство управления, где детектируется соответствующим детектором 18, и запоминается в запоминающем устройстве 13, аналогичном запоминающему устройству по п.1. С выхода детектора сигнал в виде потенциала подается на схему управления очередностью засветки имитационных лазеров 19, которая вырабатывает сигналы для управления коммутатором 20. Из соответствующего запоминающего устройства 13 низкочастотный сигнал модуляции лазерного излучения поступает на соответствующий информационный вход коммутатора 20. В зависимости от сигналов управления, вырабатываемых схемой 19, этот низкочастотный сигнал появляется на нужных выходах коммутатора 20 и после усиления в соответствующем усилителе 21 поступает на соответствующие имитационные лазеры и на лазер подсвета ложной цели, состоящие из собственно лазера 16, модулятора 14 и детектора 15. Сигнал поступает на модулятор 14, который в соответствии с этим сигналом управляет излучением лазера 16, и на детектор 15, на выходе которого формируется сигнал, включающий лазер на излучение.
Поскольку защищаемые объекты могут быть самыми различными, и, следовательно, организуемые цепочки имитационных лазеров будут различными, то схема 19 должна быть построена на основе микропроцессора, а программа обработки должна разрабатываться для каждого конкретного группового объекта.
Учитывая, что противник применяет на самолетах лазеры с длиной волны 1,06 мкм, для защиты объектов необходимо использовать аналогичные лазеры.
Таким образом, предлагаемый способ обеспечивает гарантированную защиту всех защищаемых объектов в составе группового объекта от ВТО с лазерной системой наведения. При таком способе защиты перемещение ложного пятна подсвета будет отслеживаться не только головкой самонаведения ВТО, но и системой подсвета цели противника до тех пор, пока точка прицеливания не сместится на ложную цель, с которой уже смещаться не будет. Поэтому взрыв произойдет в заранее подготовленном безопасном месте, и при повторных пусках ВТО по данному защищаемому объекту поражения объектов, входящих в состав группового, не будет, так как луч подсвета цели противника также переместится на ложную цель.
Литература
1. А.Н.Волжин, Ю.Г.Сизов. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1974 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ лазерной защиты воздушного судна | 2023 |
|
RU2805094C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТОВ ОТ ОРУЖИЯ С ЛАЗЕРНЫМ ПОЛУАКТИВНЫМ САМОНАВЕДЕНИЕМ (ВАРИАНТЫ) | 2003 |
|
RU2249172C1 |
| СПОСОБ ЗАЩИТЫ ГРУППОВОГО ОБЪЕКТА ОТ ВОЗДЕЙСТВИЯ СРЕДСТВ ПОРАЖЕНИЯ ЗАГРАДИТЕЛЬНЫМ ДИСПЕРСНЫМ ОБРАЗОВАНИЕМ | 2016 |
|
RU2656776C2 |
| СПОСОБ ЗАЩИТЫ МАЛОРАЗМЕРНОГО ПОДВИЖНОГО ОБЪЕКТА ОТ ВЫСОКОТОЧНОГО ОРУЖИЯ С ЛАЗЕРНЫМ НАВЕДЕНИЕМ | 2014 |
|
RU2563472C1 |
| Способ защиты объектов от оптико-электронных систем наведения | 2015 |
|
RU2619373C1 |
| Комплекс маскировки объекта | 2023 |
|
RU2829573C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ УПРАВЛЯЕМЫХ РАКЕТ | 2006 |
|
RU2320949C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2019 |
|
RU2707426C1 |
| Способ противодействия оптикоэлектронным системам с лазерным наведением | 2017 |
|
RU2680556C1 |
| СИСТЕМА ЗАЩИТЫ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ ОТ САМОНАВОДЯЩИХСЯ И САМОПРИЦЕЛИВАЮЩИХСЯ ВЫСОКОТОЧНЫХ БОЕПРИПАСОВ НА МАРШЕ | 2021 |
|
RU2751260C1 |
Группа изобретений относится к области высокоточного оружия, в частности к системам защиты групповых объектов от высокоточного оружия с лазерной системой наведения. Способ защиты группового объекта заключается в том, что в безопасном месте за пределами или внутри группового объекта располагают ложную цель. По первому варианту после обнаружения подсветки защищаемого объекта лазерным лучом противника защищаемый объект подсвечивают лазерным лучом с параметрами генерации, аналогичными параметрам генерации лазерного луча подсветки противника, но большим по интенсивности излучения, а затем перемещают пятно подсвета с защищаемого объекта на ложную цель. Согласно второму варианту между защищаемыми объектами и ложной целью размещают цепочки направленных вертикально вверх имитационных лазеров, имеющих параметры генерации, аналогичные параметрам генерации лазерного луча подсветки противника, а после обнаружения подсветки одного из защищаемых объектов лазерным лучом противника включают первые два ближайших к защищаемому объекту имитационных лазера для формирования пятна подсветки. После этого поочередно включают последующие в направлении ложной цели имитационные лазеры и выключают имитационные лазеры со стороны защищаемого объекта для перемещения пятна подсветки на ложную цель. Изобретение обеспечивает гарантированную защиту объектов от высокоточного оружия с лазерной системой наведения. 2 н.п. ф-лы, 3 ил.
1. Способ защиты группового объекта от высокоточного авиационного оружия с лазерной системой наведения, включающий обнаружение подсветки одного из защищаемых объектов в составе группового объекта лазерным лучом противника и подсветку расположенной в безопасном месте ложной цели лазерным лучом с параметрами генерации, аналогичными параметрам генерации лазерного луча подсветки противника, но большим по интенсивности излучения, отличающийся тем, что после обнаружения подсветки одного из защищаемых объектов в составе группового объекта лазерным лучом противника лазерным лучом с параметрами генерации, аналогичными параметрам генерации лазерного луча подсветки противника, но большим по интенсивности излучения подсвечивают сначала защищаемый объект, а затем перемещают пятно подсвета с защищаемого объекта на ложную цель.
2. Способ защиты группового объекта от высокоточного авиационного оружия с лазерной системой наведения, включающий обнаружение подсветки одного из защищаемых объектов в составе группового объекта лазерным лучом противника и подсветку расположенной в безопасном месте ложной цели лазерным лучом с параметрами генерации, аналогичными параметрам генерации лазерного луча подсветки противника, но большими по интенсивности излучения, отличающийся тем, что между защищаемыми объектами в составе группового объекта и ложной целью размещают цепочки имитационных лазеров, направленных вертикально вверх, с параметрами генерации, аналогичными параметрам генерации лазерного луча подсветки противника, а после обнаружения подсветки одного из защищаемых объектов в составе группового объекта лазерным лучом противника включают первые два ближайших к защищаемому объекту имитационных лазера для формирования пятна подсветки, после чего поочередно включают последующие в направлении ложной цели имитационные лазеры и выключают имитационные лазеры со стороны защищаемого объекта для перемещения пятна подсветки на ложную цель.
| ВОЛЖИН А.Н., СИЗОВ Ю.Г | |||
| Борьба с самонаводящимися ракетами | |||
| - М.: Воениздат, 1974, с.19 | |||
| SU 1619833, 27.01.2000 | |||
| RU 99118102 А, 27.05.2001 | |||
| ПИРОТЕХНИЧЕСКИЙ ПАТРОН ИНФРАКРАСНОГО ИЗЛУЧЕНИЯ | 2002 |
|
RU2231742C2 |

