Изобретение относится к области машиностроения, а точнее может быть применено во всех транспортных средствах, кораблях, подводных лодках, самолетах, ракетах, машиностроении, а также в энергопроизводстве (тепловых и атомных электростанций), т.е. везде, где применяются гидро- и пневмоустройства.
Известны гидро- и пневмосистемы для передачи исполнительного усилия с точным позиционированием исполнительных механизмов SU 1437253 А1, а также наличием гибкой предохранительной мембраны для предохранения контакта внутренней рабочей среды с внешней SU 859731 А. Гидроцилиндр с мембраной, жестко зафиксированной на корпусе пружиной, СН 455418 А.
Данные системы гидро- и пневмоустройств для передачи исполнительного усилия на поршень имеют свои недостатки: изобретение SU 859731 А, защищая от воздействия рабочей среды поршень, не защищает шток, SU 1437253 А1 представляет систему амортизации для снижения динамических нагрузок с довольно сложной инфраструктурой и без учета температурных колебаний в исполнительном механизме, в патенте СН 455418 А представлена мембрана, жестко зафиксированная на корпусе пружиной, но не защищающая от протечек шток гидроцилиндра. Все вышеперечисленные изобретения имеют герметичность до износа поршневых колец либо сальников штоков. Также их все объединяет негерметичность системы в целом, что во-первых не дает гарантии попадания в гидро (воздуха, воды) либо пневмо (воды) систему посторонних частиц, в итоге приводящих к износу сальников, и не дает высокой точности позиционирования исполнительного поршня относительно механизма управления.
Задачей изобретения является создание замкнутой герметичной системы гидро- и пневмоустройств точного позиционирования исполнительного механизма с мембранной защитой от утечки рабочей среды или попадания в нее нежелательных веществ (воздуха, воды и других компонентов, не относящихся к устройству) для долговечной работы и более продолжительного сохранения качества рабочей среды.
Данная задача достигается тем, что: система точного позиционирования гидро- и пневмоустройств, состоящая из цилиндра с поршнем давления, входящим без поворотов в герметично замкнутую от окружающего пространства рабочую среду, являющуюся передающим усилие звеном в системе через трубопроводы, для передачи давления к исполнительному поршню с датчиком контакта и температурными датчиками рабочей среды по всему каналу, а также устройства компенсации позиционирования исполнительного поршня, гибкой растягивающейся предохранительной мембраны, жестко зафиксированной на неподвижных корпусах и всех подвижных частях механизмов без возможности их вращения, а силовым приводом системы является поршень давления, входящий без поворотов непосредственно в герметичную рабочую среду.
Пример системы позиционирования гидро- и пневмоустройств состоит из поршня давления 2 Фиг.1, входящего в рабочую среду 5, с давлением P1, которая является передающим силовым звеном в системе, корпуса 1 с трубопроводом 7 для передачи давления P2 от поршня 2 через герметичную рабочую среду 5 по всей системе к исполнительным устройствам, датчика температуры 18, штуцера 3 для заполнения системы рабочей средой 5, гибкой растягивающейся предохранительной мембраны 6 для герметизации внутренней среды от внешней, жестко зафиксированной на корпусе пружиной 4, исполнительного устройства 8 со строго позиционированным поршнем 9 для передачи расчетного давления на механизм и датчиком контакта 20, трубопроводом 10 и клапаном 11 для стравливания внешней среды в процессе достижения однородности внутренней среды, ограничителем хода поршня 12, а также гибкой растягивающейся предохранительной мембраной 6 с пружинами 4 для ее жесткой фиксации, датчиком контроля температурного режима 18 по всей системе с устройством компенсации температурного режима эксплуатации системы 17 с поршнем 16 для точного позиционирования исполнительных устройств.
В одиночной замкнутой системе герметично собранного устройства с гибкой растягивающейся предохранительной мембраной, 6 жестко зафиксированной пружинами 4, между верхом поршня 13 с центрирующей осью 19, и корпусом 14.
На Фиг.1 изображен цилиндрический корпус 1 со штуцером 3 для нагнетания рабочей среды 5 в систему гидро- и пневмоустройств, поршень 2 с давлением P1 для передачи давления P2 в систему через трубопровод 7, а также температурный датчик 18, гибкая растягивающаяся предохранительная мембрана 6, жестко зафиксированная пружиной 4 на корпусе 1.
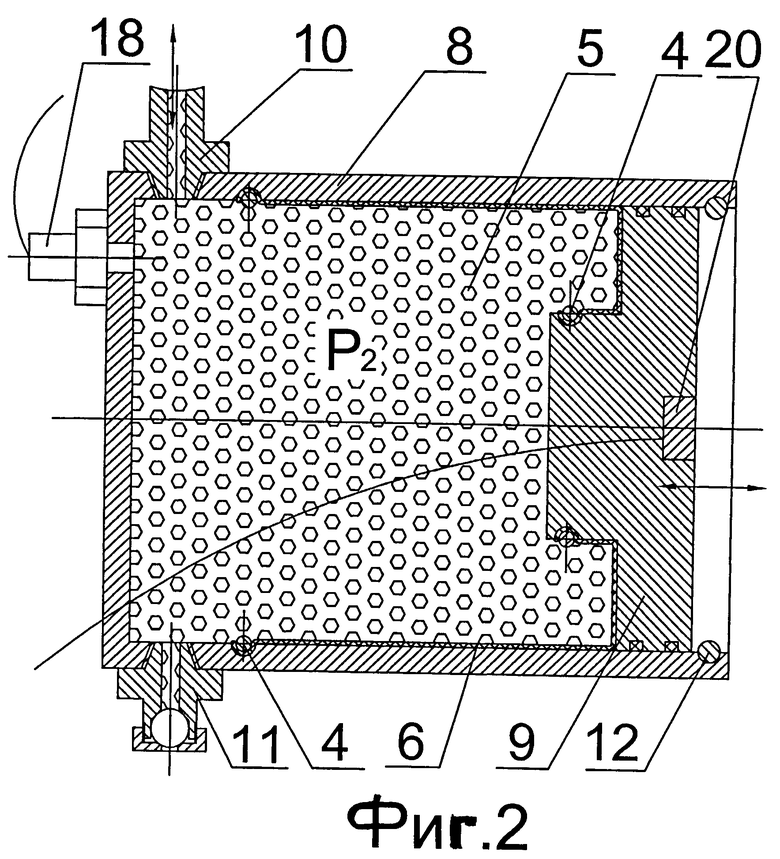
На Фиг.2 изображен внешний цилиндрический корпус 8 с соосным цилиндрическим поршнем 9 и датчиком контакта 20, ограничитель хода 12, а также температурный датчик 18, трубопровод 10 для передачи давления Р2 через рабочую среду 5, штуцер 11 для стравливания неоднородной среды, с гибкой растягивающейся предохранительной мембраной 6, жестко зафиксированной пружинами 4.
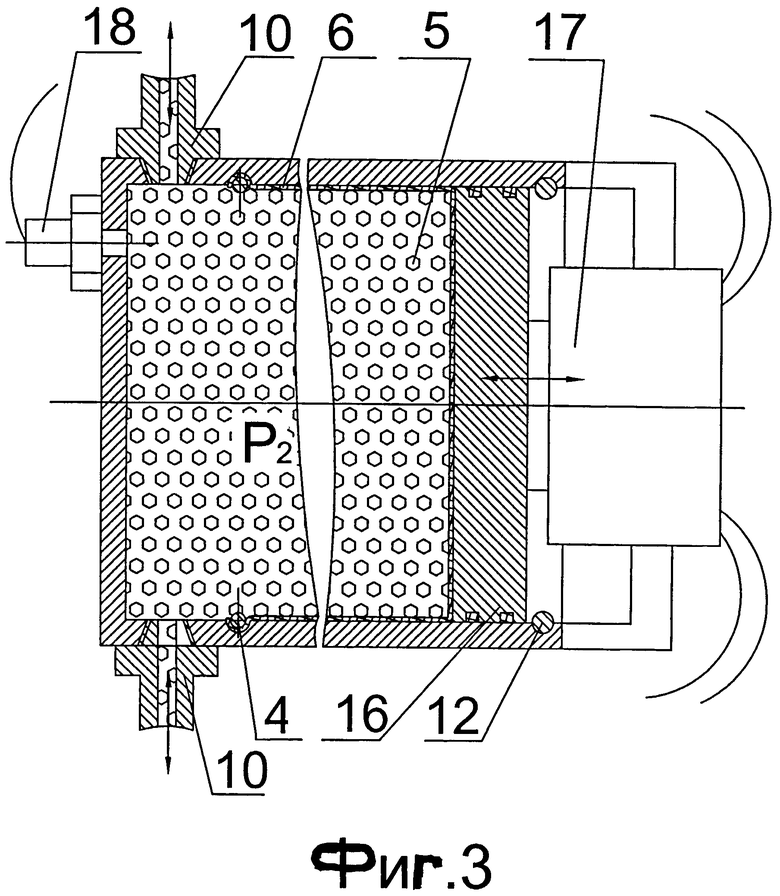
На Фиг.3. изображено устройство 17 для компенсации температурного режима эксплуатации системы с компенсационным поршнем 16 для точного позиционирования поршней исполнительных устройств и ограничителем хода 12, а также температурным датчиком 18, проходные штуцеры 10, рабочая среда 5 и пружина 4 для жесткой фиксации гибкой растягивающейся предохранительной мембраны 6.
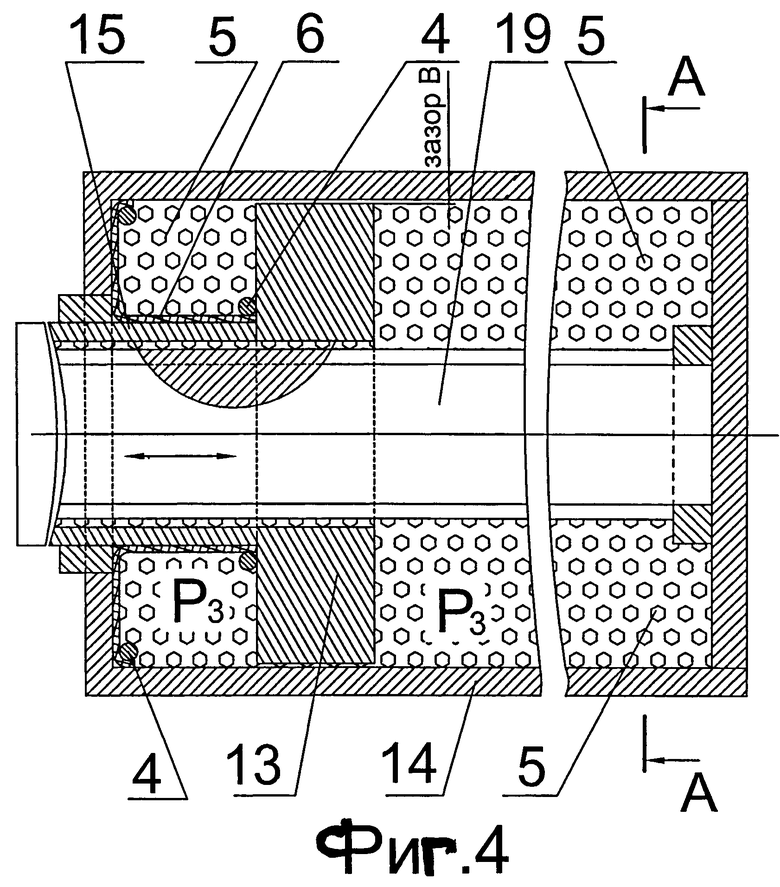
На Фиг.4 изображена одиночная замкнутая система герметично собранного устройства (например, амортизатора) с гибкой растягивающейся предохранительной мембраной 6, жестко зафиксированной пружинами 4, между верхом поршня 13, с расчетным зазором В, между корпусом 14 и поршнем 13, рабочая среда 5 с избыточным расчетным давлением Р3, шток 15 с направляющей центрирующей осью 19, не дающей поршню 13 вращаться вокруг своей оси для нормальной работы мембраны 6.
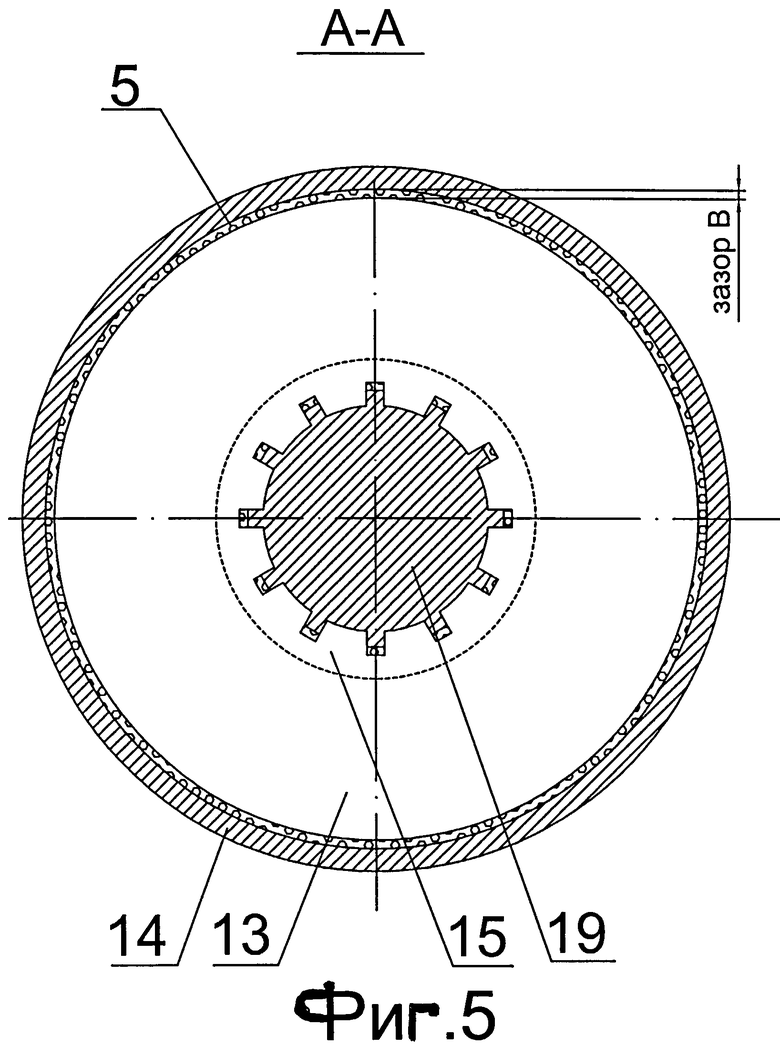
На Фиг.5 изображен поперечный разрез одиночной замкнутой системы (например, амортизатор) с поршнем 13 и направляющей центрирующей осью 19 для позиционирования поршня 13 с расчетным зазором В относительно корпуса 14 и предотвращения поворота штока 15 с поршнем 13 вокруг оси, а также рабочей среды 5.
Система позиционирования гидро- и пневмоустройств работает следующим образом: из цилиндра нагнетания в систему, Фиг.1, под действием поршня 2, входящего в рабочую среду 5, с давлением P1, которая является передающим усилие звеном, через трубопровод 7 давление Р2 от поршня давления 2 передается по всей системе к исполнительным устройствам, Фиг.2, со строго позиционированным поршнем 9 с датчиком контакта 20. Устройство компенсации температурного режима и контакта 17, Фиг.3, принимая данные с температурных датчиков 18 и контакта 20, позиционирует компенсационный поршень 16, который в зависимости от температуры системы передвигает поршень 16 для точного позиционирования поршня 9 исполнительного устройства. Герметичность системы обеспечивается гибкими растягивающимися предохранительными мембранами 6, жестко зафиксированными пружинами на корпусах и поршнях, для герметизации внутренней рабочей среды 5 по отношению к внешней.
В одиночной замкнутой системе, Фиг.4, (например, амортизатор) герметично собранного устройства с гибкой растягивающейся предохранительной мембраной 6, также жестко зафиксированной пружинами 4 на корпусе 14 и поршне 13 с направляющей центрирующей осью 19 для позиционирования поршня 13 с расчетным зазором В относительно корпуса 14 и предотвращения поворота штока 15 с поршнем 13 вокруг оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА С НАДДУВОМ | 2009 |
|
RU2486357C2 |
| ДВУХРОТОРНАЯ МАШИНА С НАДДУВОМ | 2010 |
|
RU2485336C2 |
| МАШИНА С МАЯТНИКОВЫМ РЫЧАГОМ (ВАРИАНТЫ) | 2009 |
|
RU2486343C2 |
| МАШИНА ОБЪЕМНОГО РАСШИРЕНИЯ С КАЧАЮЩИМСЯ РАБОЧИМ ОРГАНОМ | 2009 |
|
RU2418173C2 |
| МАШИНА ОБЪЕМНОГО РАСШИРЕНИЯ С МАЯТНИКОВЫМ РЫЧАГОМ | 2010 |
|
RU2495253C2 |
| МАШИНА ОБЪЕМНОГО РАСШИРЕНИЯ С ВНЕШНИМ ПОРШНЕМ | 2009 |
|
RU2438024C2 |
| МАШИНА ОБЪЕМНОГО РАСШИРЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2474704C2 |
| Пневматический усилитель гидропривода управления сцеплением транспортного средства | 1990 |
|
SU1785924A1 |
| РЕГУЛИРУЕМЫЙ ДИСКОВЫЙ МЕХАНИЗМ ДЛЯ ГАЗОВОГО РЕГУЛЯТОРА | 2008 |
|
RU2461045C2 |
| ПАТРОН ДЛЯ ПОВЫШЕНИЯ РАСХОДА РЕГУЛЯТОРА ГАЗА | 2008 |
|
RU2461043C2 |
Система предназначена для точного позиционирования гидро- и пневмоустройств с исполнительными механизмами. Система состоит из цилиндра с поршнем давления, входящим без поворотов в герметично замкнутую от окружающего пространства рабочую среду, являющуюся звеном, передающим усилие в системе через трубопроводы, для передачи давления к исполнительному поршню с датчиком контакта и температурными датчиками рабочей среды по всему каналу, а также устройства компенсации позиционирования исполнительного поршня, гибкой растягивающейся предохранительной мембраны, жестко зафиксированной на неподвижных корпусах и всех подвижных частях механизмов без возможности их вращения, а силовым приводом системы является поршень давления, входящий без поворотов непосредственно в герметичную рабочую среду. Технический результат - повышение точности позиционирования исполнительного механизма. 5 ил.
Система точного позиционирования гидро- и пневмоустройств, состоящая из цилиндра с поршнем давления, входящим без поворотов в герметично замкнутую от окружающего пространства рабочую среду, являющуюся передающим усилие звеном в системе через трубопроводы, для передачи давления к исполнительному поршню с датчиком контакта и температурными датчиками рабочей среды по всему каналу, а также устройства компенсации позиционирования исполнительного поршня, гибкой растягивающейся предохранительной мембраны, жестко зафиксированной на неподвижных корпусах и всех подвижных частях механизмов без возможности их вращения, а силовым приводом системы является поршень давления, входящий без поворотов непосредственно в герметичную рабочую среду.
| Механизм фиксации поворотного вала | 1989 |
|
SU1672005A1 |
| ПНЕВМАТИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ДЕМПФИРУЮЩИЙ МЕХАНИЗМ | 2002 |
|
RU2219396C1 |
| Герметичный гидропреобразователь | 1972 |
|
SU830014A1 |
| CN 101725587 A, 09.06.2010 | |||
| JP 56086209 A, 13.07.1981 | |||

