ОБЛАСТЬ ТЕХНИКИ
Изобретение, в основном, относится к области комбинированных привязных аэростатов, более конкретно к аэростатным грузоподъемным устройствам.
УРОВЕНЬ ТЕХНИКИ
В настоящее время растет интерес к использованию привязных аэростатов для несения нагрузки и выполнения разнообразных задач по обследованию (надзору) и по коммуникационным задачам. В отличие от летательных аппаратов с крылом неизменяемой геометрии или вертолетов, в этих аэростатах используется гелий или водород для того, чтобы они находились в воздухе. Они являются беспилотными, недорогими и закреплены на земле с помощью привязной системы, которая также обеспечивает питание энергией и связь.
В словаре Webster дано определение термину «service load», что означает: «нагрузка, которую, предположительно, выдержит конструкция при обычной эксплуатации»(1).
Привязной аэростат предназначен для поднятия, несения и удерживания эксплуатационной нагрузки на заранее определенной высоте в месте ее размещения или развертывания в атмосфере Земли. Его подъемная сила должна быть достаточной для выдерживания своего собственного веса, веса привязного троса и веса эксплуатационной нагрузки. Поскольку вес привязного троса увеличивается с высотой, рабочая высота аэростата и его максимальная эксплуатационная нагрузка имеют верхний предел, определяемый конструкцией.
Также привязной аэростат подвержен перемещению под действием ветра; ветер будет отбрасывать аэростат от идеального вертикального положения его размещения. Чтобы сохранить ту же самую высоту, привязной трос аэростата должен быть длиннее, и, поскольку происходит его смещение от вертикального положения, привязной трос будет также провисать. Чем сильнее ветер, тем больше смещение (аэростата) от вертикального положения его размещения; тем больше провисание привязного троса, тем больше вес привязного троса. Этот дополнительный вес будет тянуть аэростат вниз с его первоначальной высоты.
Настоящее изобретение относится к нейтральному относительно величины эксплуатационной нагрузки, самоуравновешивающемуся аэростатному грузоподъемному устройству, способному одновременно нести большое количество эксплуатационных нагрузок на различных высотах в атмосфере Земли.
Для пояснения особенности изобретения, заключающегося в его не зависимости от эксплуатационной нагрузки, проведем по порядку сравнение с обычным грузоподъемником.
В большинстве базовых исполнений аэростатное грузоподъемное устройство состоит из:
- аэростатного средства для позиционирования устройства в атмосфере Земли,
- аэростатного средства для одновременного развертывания большого количества эксплуатационных нагрузок на различных высотах, вдоль упомянутых средств позиционирования, и
- средств для контроля и управления работой устройства.
Для сравнения, неаэростатный грузоподъемник имеет следующее:
- средства для позиционирования грузоподъемника рядом или внутри строительной конструкции, представляющей из себя вертикальную шахту подъемника, построенную вблизи строительной конструкции и снабженную направляющими (рельсами), прикрепленными к шахте,
- средства для развертывания эксплуатационной нагрузки, представленные кабиной грузоподъемника и средством ее перемещения вверх и вниз по направляющим шахты грузоподъемника, и
- средства для контроля и управления положением кабины грузоподъемника, представленные несколькими пультами управления, размещенными внутри кабины грузоподъемника, и на этажах, обслуживаемых грузоподъемником.
Основное новшество настоящего изобретения, помимо того, что средства позиционирования и развертывания эксплуатационной нагрузки являются аэростатными, заключается в свойстве его независимости от эксплуатационной нагрузки. Эта особенность (в качестве эквивалента имеющимся нескольким кабинам, совместно использующим одни и те же направляющие обычного подъемника) позволяет не прилагать какую-либо нагрузку к шахте грузоподъемника и, соответственно, к строительному сооружению.
Поиск среди известного уровня техники не выявил никаких патентов, в которых бы шла речь о данном изобретении, при этом ни одно из решений, известных из уровня техники, относящихся к привязным аэростатам, не может претендовать на независимость от нагрузки или на одновременное развертывание большого числа эксплуатационных нагрузок на различных высотах в атмосфере Земли. Однако следующие патенты США имеют отношение к данной теме:
Редфорд сообщает о длинном, полом, цилиндрическом устройстве, подвешенном в атмосфере с помощью тороидальных баллонов, расположенных по его высоте. Устройство способствует обеспечению конвекционного перемещения воздуха внутри него, как способа сбора, транспортировки и распределения воды, конденсированной из водяного пара, присутствующего в перемещающемся внутри воздухе. Рабочая высота устройства в атмосфере управляется кабелем, навитым на катушку с приводом, закрепленную на земле. На оболочке баллона подвешен конденсатор водяного пара. На поверхностях конденсатора происходит конденсация водяного пара, поднимающегося внутри устройства и передача собранной воды в нижнюю часть устройства с помощью системы труб спиральной формы, расположенной внутри цилиндрической стойки устройства. Вода, перемещающаяся вниз по системе труб спиральной формы, будет также вращать устройство вокруг его вертикальной оси, чтобы увеличить его устойчивость к ветру в атмосфере. При достижении водой дна устройства, она распыляется по земле через кольцо распределения воды.
Мияке сообщает о привязном сферическом аэростате с оболочкой, наполненной более легким, чем воздух, газом, с гондолой, прикрепленной к днищу оболочки аэростата, вертикальным стабилизатором, прикрепленным к той же самой оболочке, и узлом соединения для закрепления аэростата через привязной трос к барабану с приводом, находящемуся на земле. Узел соединения расположен напротив вертикального стабилизатора аэростата, при этом гондола расположена между ними в вертикальной плоскости, в которой находится центр сферического аэростата и его центр тяжести. Эта особенность придает привязному сферическому аэростату повышенную устойчивость в отношении ветра. Вертикальный стабилизатор также придает гондоле аэростата устойчивость в безветренных условиях. При размещении на меньших высотах в атмосфере Земли, ниже 150 метров, гондола привязного сферического аэростата остается вертикальной и относительно неподвижной даже при скорости ветра свыше 7 метров в секунду. Эта особенность обеспечивает возможность производить с помощью камер, установленных в гондоле аэростата, фотоснимки с высоты птичьего полета и видеосъемку, что не представляется возможным при использовании обычного привязного аэростата.
Редфорд сообщает о высоком, большого диаметра, полом воздушном транспортном «челноке», с привязными тросами от земли, имеющем колонну цилиндрической формы в своей верхней части, на которой размещен цилиндрический баллон и клапаны выхода воздуха из устройства, и коническую колонну переменной длины в своей нижней части, где размещен большой клапан забора воздуха. Система подвески устройства содержит оболочку вспомогательного баллона и баллон в виде круглого кольца большого диаметра, размещенный вокруг колонны цилиндрической формы, оба они наполнены более легкими, чем воздух, газами. Вспомогательный баллон обладает достаточной подъемной силой, чтобы выдерживать свой собственный вес и вес цилиндрической колонны. Баллон в виде круглого кольца большого диаметра предназначен для поддержания своего собственного веса, веса остальной части устройства, включая привязные тросы, и обеспечения дополнительной подъемной силы для поднятия устройства на большие высоты для решения эксплуатационных задач. Снижение воздушного транспортного «челнока» на меньшие высоты управляется привязным тросом, навитым на катушку с приводом, закрепленную на земле. Цилиндрический баллон, расположенный внутри цилиндрической колонны устройства, используется для того, чтобы компенсировать изменение плотности наружного воздуха во время циклов подъема и опускания воздушного транспортного «челнока». Оболочка вспомогательного баллона и баллон в виде круглого кольца большого диаметра снабжены гироскопическими парусами, обеспечивающими вращение устройства во время фаз подъема и опускания, чтобы гироскопически стабилизировать устройство при работе в условиях ветра. В качестве дестабилизатора инверсионного слоя, устройство нагружает свой воздушный транспортный «челнок» большим объемом влажного воздуха, находящегося ниже атмосферного инверсионного слоя. Перенося этот объем воздуха на большую высоту в атмосфере, устройство осушает и, следовательно, нагревает воздух внутри своего воздушного транспортного «челнока». Этот горячий и сухой воздух, находящийся внутри воздушного транспортного «челнока», выпускается на высоте ниже атмосферного инверсионного слоя, чтобы запустить процесс тепловой дестабилизации инверсионного слоя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Устройство по настоящему изобретению и его функционирование направлены на устранение ограничений, присущих известным на настоящий момент аэростатам. Аэростатное грузоподъемное устройство предназначено для отделения носителя веса привязного троса от носителя эксплуатационной нагрузки. Эта особенность общей конструкции позволяет устройству одновременно развертывать большое количество эксплуатационных нагрузок на различных высотах в атмосфере Земли, без увеличения веса привязного троса устройства.
Функцию носителя веса привязного троса устройства выполняет один или более аэростатных блоков, выполненных в форме кругового купола (далее - круговой купольный блок), заполненных более легким, чем воздух, газом. Аэростатный круговой купольный блок предназначен для поддержания своего собственного веса, а также - веса своих прикрепленных аэростатных (бортовых) кабелей, которые заменяют привязной трос используемых в настоящее время аэростатов. Эти бортовые кабели соединяют круговой купольный блок с вращающейся круговой платформой, расположенной на блоке основной платформы. Несколько крепежных подузлов, находящихся на периферии блока основной платформы, предназначены для закрепления устройства на наземном или на водном, базирующемся на воде, участке обслуживания.
Функцию носителя эксплуатационной нагрузки устройства выполняют несколько аэростатных подъемных (бустерных) блоков с собственным автономным приводом, заполненных более легким, чем воздух, газом. Спроектированный с целью скольжения по комплекту бортовых кабелей устройства, бустерный блок будет нести свой собственный вес и вес эксплуатационной нагрузки для ее развертывания на желаемой высоте, вдоль упомянутых бортовых кабелей.
Модульная конструкция устройства позволит соединить несколько аэростатных бустерных блоков, чтобы они могли нести большую эксплуатационную нагрузку, подобно тому, как это выполняется несколькими локомотивами, соединенными для того, чтобы тянуть более протяженный и тяжелый железнодорожный состав.
Аэростатный круговой купольный блок обладает характеристиками усовершенствованного кругового дискового крыла. Круговое дисковое крыло, в значительной степени, ускользнуло от внимания научных исследователей. Литература, в которой подробно раскрыта аэродинамика кругового дискового крыла, встречается довольно редко, и при этом происходит из взаимосвязанных областей, таких как механика текучих сред, авиационное и спортивное машиностроение.
В 1972 г. ВМС США начали проект по усовершенствованию самоподвешенной в воздухе световой сигнальной ракеты, являющейся, по существу, стабилизируемым за счет вращения осесимметричным летательным диском. Stilley & Carstens исследовали аэродинамику сигнальной ракеты и других подобных летательных дисков. Результаты испытаний в аэродинамической трубе были опубликованы как типовые графики коэффициентов осевого, нормального моментов и момента тангажа. Биомеханический и аэродинамический анализ, математические модели, компьютерное имитационное моделирование и визуализация потока обеспечили возможность объяснения физики кругового дискового крыла.
Круговой купольный блок устройства и его подузел стабилизатора купола напоминают «двухъярусное летающее блюдце», новую тандемную гироскопическую инерциальную структуру (Tandem Giroscopic Inertial Structure), сочетающую эффекты Коанда с гидродинамикой Бернулли и законом сохранения момента. В дополнение к этому, подузел стабилизатора купола усиливает устойчивость купола за счет опускания его центра тяжести ниже центра приложения подъемной силы. Это свойство высокой устойчивости кругового купольного блока, выраженное по отношению к каждому рысканию вертикальной оси, крену и тангажу, позволяет вернуться к состоянию равновесия, при котором чистая сумма усилий равна нулю, после любого ветрового возмущения.
Для повышения устойчивости в атмосфере, устройство сконструировано с обеспечением возможности вращения вокруг своей вертикальной оси, действуя как высокий вертикальный гироскоп в атмосфере. Эта особенность была подсказана «поведением» тропического урагана, который является единственной метеорологической системой, перемещающейся на сотни миль с востока на запад в атмосфере Земли. Развитая ураганная система, которая напоминает огромный цилиндрический гироскоп, является устойчивой из-за своей огромной гироскопической инерции, вследствие чего земля и ее атмосфера движутся над ней и «вокруг» нее. Наблюдатель, находящийся на поверхности земли, получает иллюзию того, что ураган перемещается с востока на запад, тогда как на самом деле структура урагана является устойчивой, а Земля и ее атмосфера перемещаются с запада на восток.
Система управления устройством распределена между главным контроллером (главным блоком управления), расположенным в блоке основной платформы, и несколькими бортовыми контроллерами, расположенными в каждом аэростатном бустерном блоке. Такой подход упростил управление устройством за счет возможности использования только одного типа бортового контроллера, ограничиваясь при этом его размещением только в аэростатных бустерных блоках устройства.
В состав основного контроллера входят четыре постоянно действующих контроллера: контроллер проводной связи, контроллер распределения мощности, контроллер высоты и контроллер устойчивости.
Контроллеры проводной связи и распределения мощности выполнены с соблюдением современных промышленных стандартов и не требуют дополнительного анализа. Их приспособление к индивидуальным требованиям с целью удовлетворения специфических потребностей устройства считается ординарной инженерной задачей.
Бортовые контроллеры устройства осуществляют мониторинг управляемых с помощью гироскопа воздушных винтов, установленных в каждом аэростатном купольном блоке и поворачиваемых на шарнире (вертлюжных) воздушных винтов и устройств для перемещения по электрическим кабелям, установленных в каждом бустерном блоке.
В каждом аэростатном бустерном блоке предусмотрено четыре устройства перемещения по электрическим кабелям, четыре поворачиваемых на шарнире воздушных винта и, по меньшей мере, четыре управляемых с помощью гироскопа винта - в каждом круговом купольном блоке.
Электрическая энергия, необходимая для работы устройства, распределяется двумя из четырех бортовых кабелей, выполненными в виде шины подачи энергии. Проводная связь обеспечивается остальными двумя бортовыми кабелями, выполненными в виде шины связи.
Для реализации вращательной устойчивости электрические гироуправляемые воздушные винты используются, чтобы обеспечить вращение и синхронизацию скорости вращения всех аэростатных купольных блоков и бортовых кабелей со скоростью вращения поворотной круговой платформы, которая установлена на блоке основной платформы устройства.
Для обеспечения вертикального выравнивания всех аэростатных блоков устройства, контроллер устойчивости использует два независимых управляющих модуля: GPS Sync и Rotational Sync. Поскольку управляющие модули GPS Sync и Rotational Sync работают одновременно, воздушные винты, расположенные на каждом аэростатном блоке устройства, присоединены либо к управляющим модулям GPS Sync, либо к управляющим модулям Rotational Sync.
Протоколы управления для управляющих модулей GPS Sync и Rotational Sync приспособлены к тому, чтобы отражать соответствующий эксплуатационный режим устройства - Modus Operandi (M.O.). На основе данных об условиях окружающей обстановки в месте размещения, устройство может эксплуатироваться в трех М.О.:
1. М.О. 1: «Стационарный негироскопический», при котором невращающаяся основная платформа устройства закреплена на стационарном наземном или надводном участке обслуживания, при этом его круговая платформа и все его находящиеся в воздухе блоки не вращаются,
2. М.О. 2: «Стационарный гироскопический», при котором невращающаяся основная платформа устройства закреплена на стационарном наземном или надводном участке обслуживания, при этом его круговая платформа и все его находящиеся в воздухе блоки синхронно вращаются, и
3. М.О. 3: «Мобильный гироскопический», при котором невращающаяся основная платформа устройства находится в воздухе или закреплена на передвижном участке обслуживания, находящемся на земле или на воде, при этом его круговая платформа и все его находящиеся в воздухе блоки синхронно вращаются.
Пилот устройства определит, на основании условий эксплуатации, наилучший М.О. и соответствующим образом настроит рабочие параметры контроллера устойчивости.
Для управляющего модуля GPS Sync необходимо на блоке вращающейся основной платформы устройства и на всех аэростатных бустерных блоках установить приемные блоки глобального позиционирования (блоки приема сигналов gp). Сигнал запроса GPS Sync, создаваемый контроллером устойчивости, будет передаваться на вращающуюся платформу устройства и на все аэростатные бустерные блоки; это приведет к инициированию считывания и хранения координат gp всех приемных блоков GPS. Каждый бортовой контроллер будет сравнивать свои собственные координаты gp с координатами, полученными от контроллера устойчивости. На основании этого сравнения бортовой контроллер примет решение в отношении ориентирования и скорости всех шарнирно закрепленных воздушных винтов под управлением GPS Sync, для корректирования вертикального выравнивания аэростатного блока.
Контроллер высоты использует два независимых модуля управления высотой: один выделен для самого верхнего купола устройства, а второй - для всех аэростатных бустерных блоков.
Высота самого верхнего купольного блока устройства регулируется четырьмя лебедками, расположенными на блоке вращающейся круговой платформы устройства. Эти лебедки используются для управления длиной бортовых кабелей, прикрепленных к самому верхнему куполу.
Высотой аэростатного бустерного блока управляет узел его перемещения по кабелю и фиксирования на кабеле; для этого выделены шарнирно закрепленные воздушные винты, используемые для перемещения аэростатного бустерного блока вверх и вниз по бортовым кабелям. Таким способом каждый аэростатный бустерный блок может автономно подниматься и опускаться на любую желаемую высоту ниже уровня самого верхнего купола устройства. Как только достигнута желаемая высота, узлы фиксирования на кабеле аэростатного бустерного блока фиксируются на бортовых кабелях.
Когда устройство передислоцируют в другую зону обслуживания, его блок основной платформы будет работать, находясь в воздухе. Четыре воздушных винта, закрепленные шарнирными соединениями, рассчитанными на большие тяговые усилия, расположенные на периферии блока основной платформы устройства, служащие для поднятия и транспортировки устройства в другую зону обслуживания, будут управляться дистанционно, от находящегося в воздухе командного летательного аппарата, такого как транспортный вертолет.
Таким образом, основной целью настоящего изобретения является устранение ограничений использования известных привязных аэростатов и отделение носителя веса привязных тросов от носителя эксплуатационной нагрузки.
Дополнительной целью настоящего изобретения является обеспечение выполнения функции носителя веса привязных тросов одним или более аэростатными купольными блоками, заполненными более легким, чем воздух, газом. Находящийся в воздухе купольный блок спроектирован для обеспечения поддержания своего собственного веса, а также - веса прикрепленных бортовых кабелей, заменяющих привязной трос обычного аэростата.
Дополнительной целью настоящего изобретения является одновременное размещение на различных высотах в атмосфере Земли большого количества эксплуатационных нагрузок, с использованием для этого нескольких аэростатных самодвижущихся бустерных блоков, заполненных газом, более легким, чем воздух. Разработанные с обеспечением возможности скольжения по бортовым кабелям устройства, аэростатные бустерные блоки будут нести по бортовым кабелям свой собственный вес и вес эксплуатационных нагрузок для их развертывания на желаемой высоте.
Кроме того, целью настоящего изобретения является создание аэростатного купольного блока устройства, имеющего такую же форму, как у кругового дискового крыла, с жестко закрепленным под ним подузлом стабилизатора купола. Такая конфигурация конструкции опускает центр тяжести аэростатного купольного блока ниже центра приложения подъемной силы и преобразует купольный блок в тандемную гироскопическую инерциальную структуру.
Дополнительной целью настоящего изобретения является обеспечение вращательной устойчивости устройства посредством использования воздушных винтов, установленных на каждом аэростатном блоке устройства. Воздушные винты вращаются и синхронизируют скорость вращения аэростатных блоков устройства со скоростью вращения наземного блока вращающейся круговой платформы.
Еще одной целью настоящего изобретения является обеспечение вертикальности устройства за счет использования Глобальной системы позиционирования (GPS). Электрические шарнирно закрепленные воздушные винты, установленные на всех аэростатных блоках устройства, используются для компенсации любого их перемещения при ветровой миграции. Эти воздушные винты постоянно выравнивают глобальное положение каждого аэростатного блока устройства относительно глобального позиционирования наземного блока круговой платформы.
Дополнительной целью настоящего изобретения является управление высотой самого верхнего купола устройства, путем использования лебедок высокой мощности, размещенных на наземной вращающейся круговой платформе устройства и служащих для изменения длины бортовых кабелей, прикрепленных к самому верхнему куполу.
Еще одной целью настоящего изобретения является обеспечение возможности каждого аэростатного бустерного блока автономно подниматься и опускаться на любую желаемую высоту ниже высоты, на которой находится самый верхний купол устройства, благодаря использованию предназначенных для этого шарнирно закрепленных воздушных винтов, обеспечивающих перемещение вверх и вниз по бортовым кабелям устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На ФИГ.1 представлена вертикальная проекция предпочтительного варианта осуществления настоящего изобретения, в котором аэростатные средства для позиционирования устройства в атмосфере Земли выполнены в виде аэростатного купольного блока.
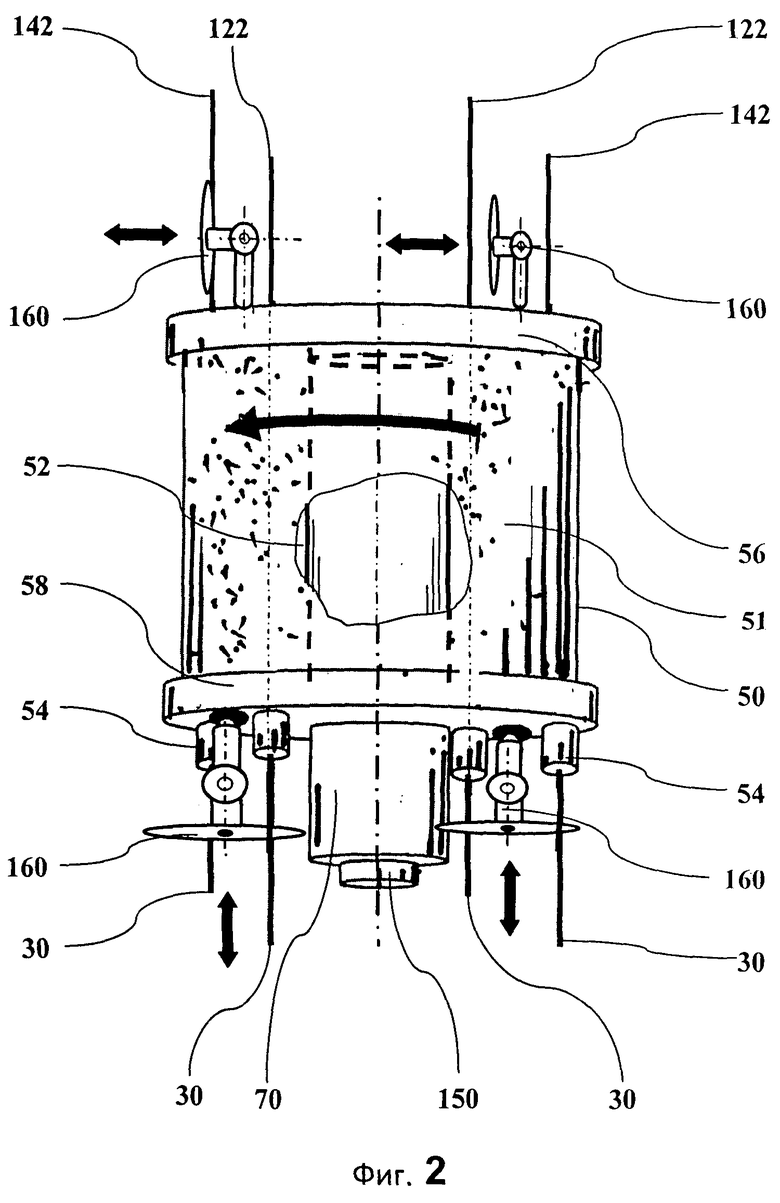
На ФИГ.2 представлена увеличенная вертикальная проекция аэростатных средств для развертывания эксплуатационных нагрузок, выполненных в виде аэростатного бустерного блока.
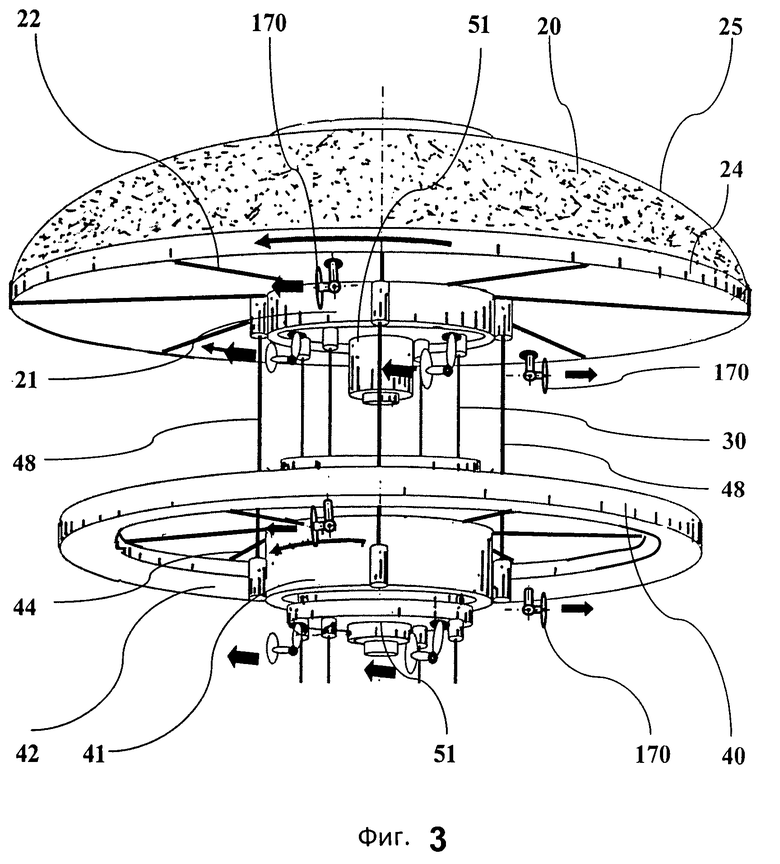
На ФИГ.3 - увеличенная вертикальная проекция аэростатного купольного блока.
На ФИГ.4 - увеличенная вертикальная проекция средств для управления устройством в процессе эксплуатации, изображенных вместе с аэростатным бустерным блоком.
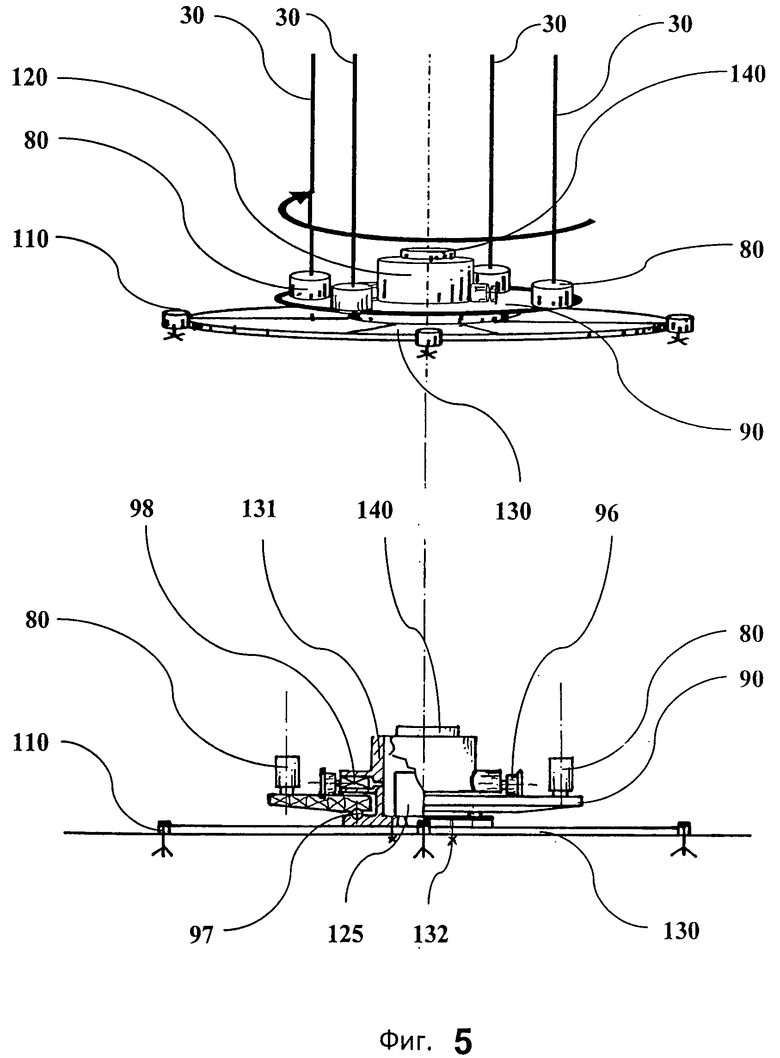
На ФИГ.5 - увеличенная вертикальная проекция средств для управления устройством в процессе эксплуатации, изображенных вместе с их частичным поперечным разрезом.
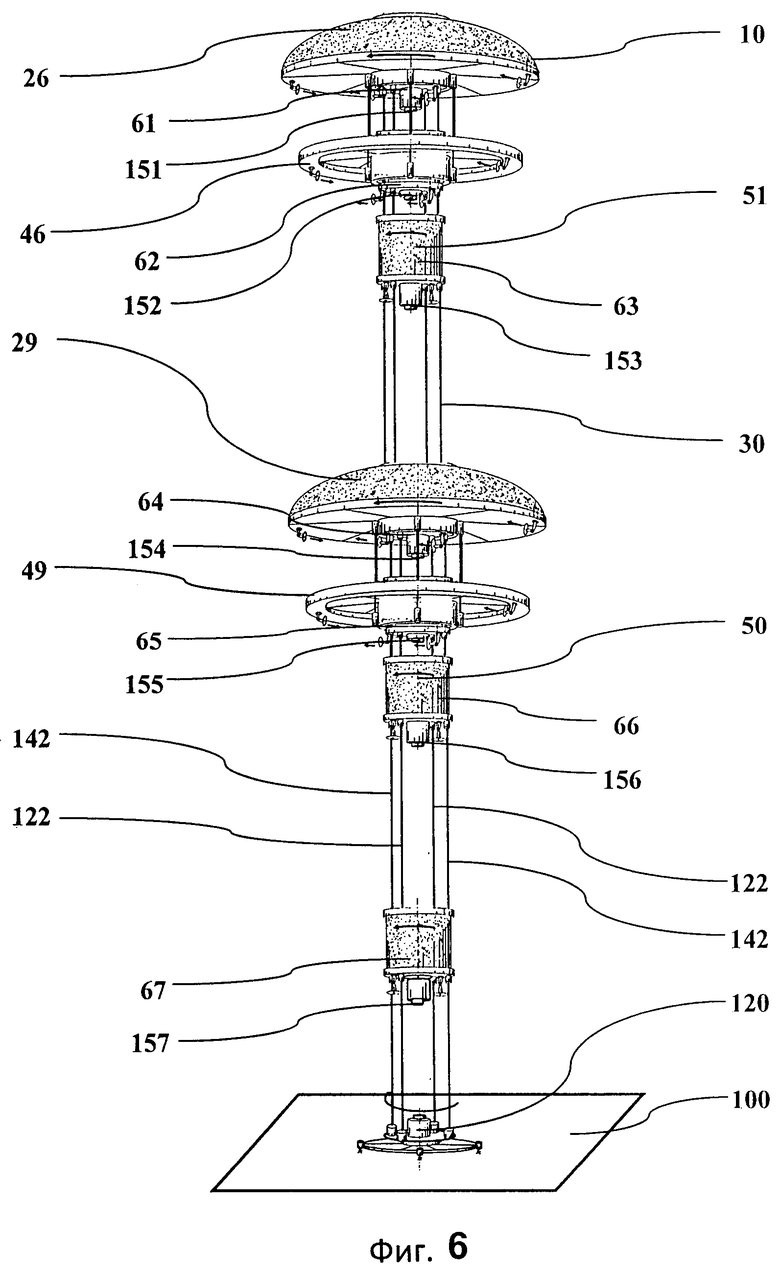
На ФИГ.6 - вертикальная проекция второго варианта осуществления настоящего изобретения, в котором аэростатные средства для позиционирования устройства в атмосфере Земли скомпонованы в виде двух аэростатных круговых купольных блоков, заполненных более легким, чем воздух, газом, и расположенных в атмосфере на различных высотах.
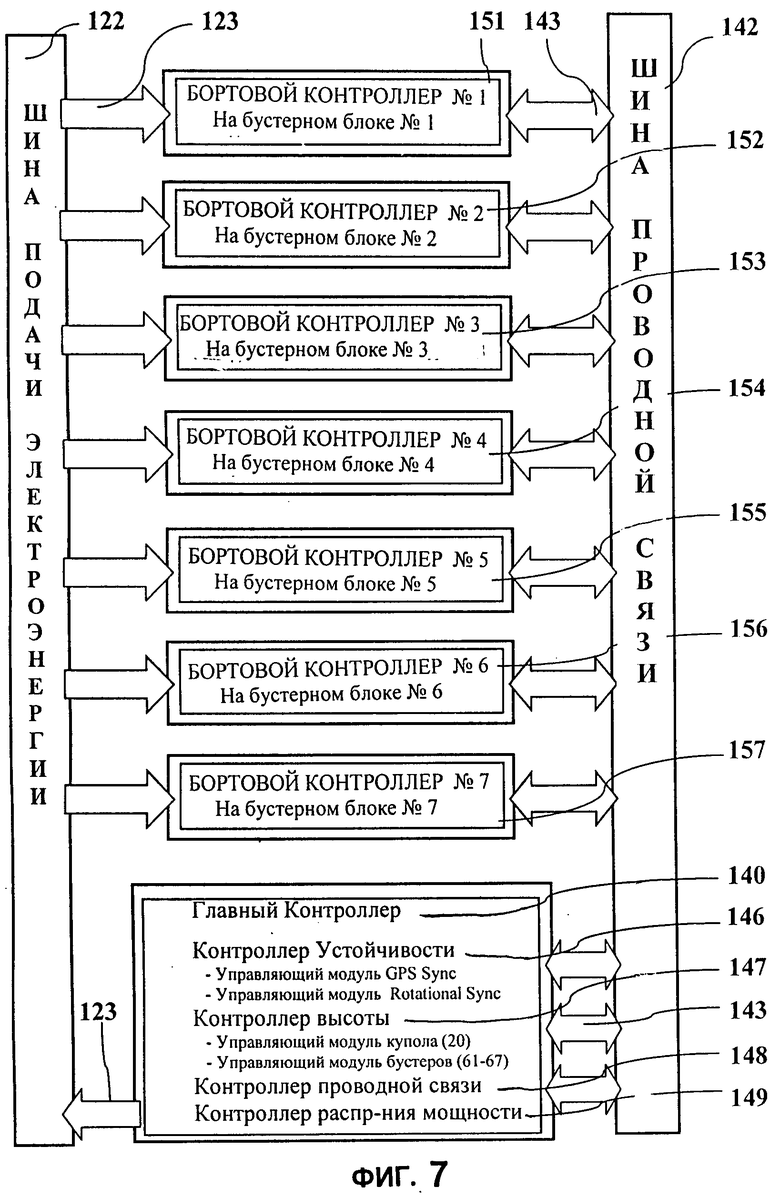
На ФИГ.7 - диаграмма управления устройством, приспособленная ко второму варианту осуществления настоящего изобретения.
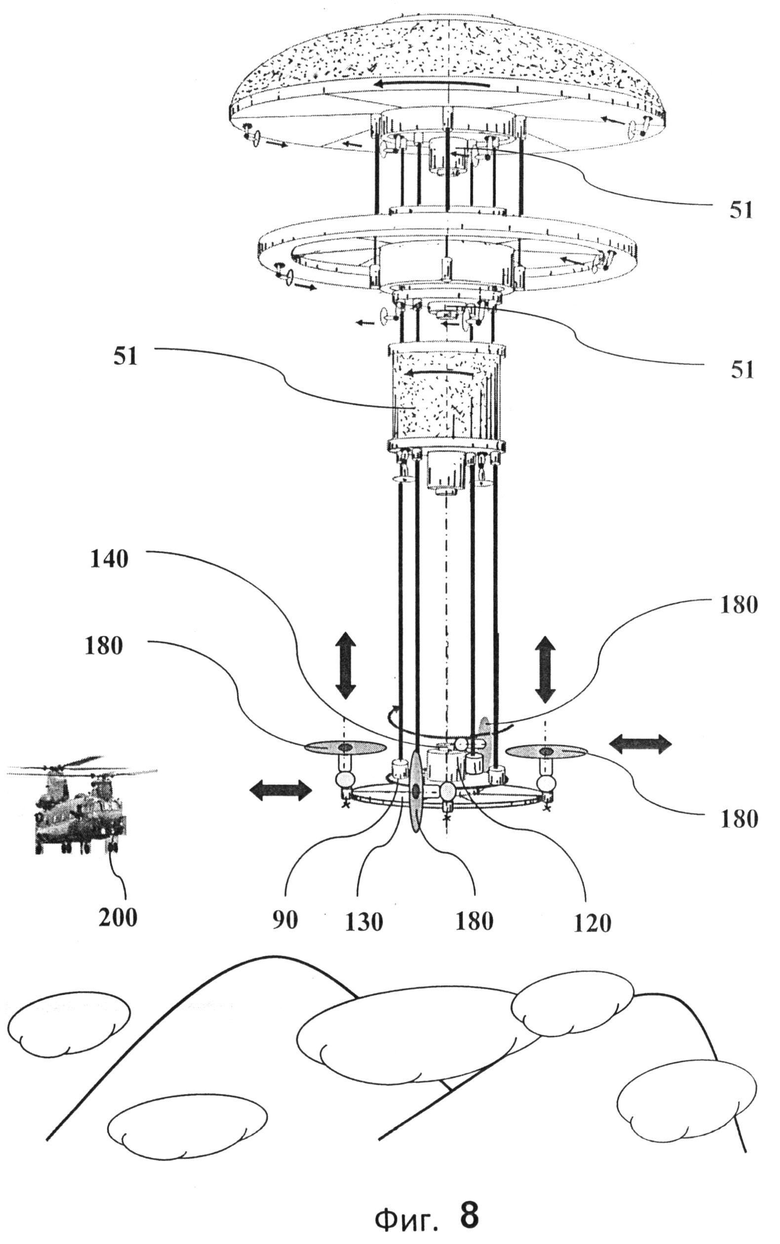
На ФИГ.8 - вертикальная проекция третьего варианта осуществления настоящего изобретения, в котором устройство является вращающимся, при этом блок его основной платформы выполнен находящимся в воздухе.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Новизна и преимущества настоящего изобретения будут более понятны с учетом следующего описания наилучшего способа осуществления изобретения, иллюстрируемые сопроводительными чертежами.
Предпочтительный вариант осуществления настоящего изобретения показан на ФИГ.1 - ФИГ.5.
На ФИГ. 1 представлен предпочтительный вариант осуществления настоящего изобретения, содержащий аэростатные средства 10 для позиционирования устройства в атмосфере Земли, аэростатные средства 50 для одновременного развертывания множества эксплуатационных нагрузок на различных высотах в атмосфере Земли вдоль средств для позиционирования устройства, и средства 120 для управления устройством в процессе его эксплуатации.
На ФИГ.1 также изображено устройство, закрепленное на участке обслуживания 100, обозначенном как участок наземного обслуживания 102.
На ФИГ.1 далее показаны аэростатные средства 10 для позиционирования устройства в атмосфере Земли, содержащие при этом аэростатный купольный блок 20, заполненный более легким, чем воздух, газом, и бортовые кабели 30.
На ФИГ.2 изображено аэростатное средство 50 для размещения эксплуатационной нагрузки, оно далее представлено в виде бустерного блока 51.
На ФИГ.2 также изображен бустерный блок 51, содержащий цилиндрический корпус кольцевой формы 52, заполненный более легким, чем воздух, газом, нижний подузел 58 круглой платформы, верхний подузел 56 круглой платформы и подузел 70 секции эксплуатационной нагрузки.
На ФИГ.2 показан также подузел секции эксплуатационной нагрузки 70, содержащий при этом бортовой контроллер 150.
На ФИГ.2 далее показан подузел 58 нижней круглой платформы, содержащий четыре подузла 54 узлов перемещения и фиксирования на кабелях и два шарнирно закрепленных воздушных винта 160, выполненных как двигательная установка, создающая толкающее воздействие в направлении вверх/вниз.
На ФИГ.2 также показан подузел 56 верхней круглой платформы, содержащий два шарнирно закрепленных воздушных винта 160, выполненных как двигательная установка, создающая тяговое усилие влево/вправо.
На ФИГ.2 показаны также бортовые кабели 30, из которых два кабеля 122 выполнены в виде последовательной шины подачи электроэнергии, а два кабеля 142 - выполнены в виде шины проводной связи.
На ФИГ.3 показан аэростатный купольный блок 20, содержащий при этом под-узел в виде оболочки 25 купола, обод 24 купола, ступицу 21 купола и множество спиц 22 купола, соединяющих ступицу 21 купола с ободом 24 купола.
На ФИГ.3 также показан аэростатный купольный блок 20, содержащий при этом подузел стабилизатора 40 купола этого блока.
На ФИГ.3 также изображен подузел стабилизатора 40 купола, содержащий обод 42 стабилизатора, ступицу 41 стабилизатора и множество спиц 44 стабилизатора, соединяющих ступицу 41 стабилизатора с ободом 42 стабилизатора.
На ФИГ.3 также изображен аэростатный купольный блок 20, содержащий множество вертикальных стержней 48, используемых для соединения ступицы 41 стабилизатора со ступицей 21 купола.
На ФИГ.3 показан также аэростатный купольный блок 20, содержащий четыре воздушных винта 170 с управлением с помощью гироскопа, два из которых расположены диаметрально противоположно на ободе 24 купола, а два других диаметрально противоположно на ободе 42 стабилизатора, при этом, они используются для управления скоростью вращения аэростатного купольного блока 20.
На ФИГ.3 также представлен аэростатный купольный блок 20, содержащий также два бустерных блока 51, размещенных внутри ступицы 21 купола и внутри ступицы 41 стабилизатора.
На ФИГ.4 показан бустерный блок 51 с двумя шарнирно закрепленными воздушными винтами 160, размещенными на его подузле верхней круглой платформы 56, выполненными в виде вращающейся двигательной системы.
На ФИГ.4 изображены также компоненты средств 120 управления устройством, а именно, блок основной платформы 130, блок щита управления 131 и блок круговой платформы 90, предназначенный для вращения вокруг упомянутого блока щита управления 131.
На ФИГ.4 показан также блок круговой платформы 90, дополнительно содержащий четыре лебедки 80, используемые для регулирования длины бортовых кабелей 30.
На ФИГ.5 изображен блок основной платформы 130, дополнительно содержащий четыре крепежных подузла 110, предназначенных для закрепления упомянутого блока 130 основной платформы на участке обслуживания 100.
На ФИГ. 5 показан также блок щита управления 131, прикрепленный к блоку основной платформы 130 множеством крепежных приспособлений 132.
На ФИГ.5 показан также блок щита управления 131, содержащий электрические двигатели 98, соединенные с подузлами 96 через ведущую шестерню для взаимодействия с блоком 90 круговой платформы и его вращения.
На ФИГ.5 показан блок щита управления 131, содержащий также под-узел 97 осевого подшипника, который обеспечивает возможность вращения блока 90 круговой платформы относительно блока щита управления 131.
На ФИГ.5 показан также блок щита управления 131, содержащий подузел 125 генератора мощности и главный контроллер 140.
Второй вариант осуществления настоящего изобретения показан на ФИГ.6 и ФИГ.7.
На ФИГ.6 показан второй вариант осуществления настоящего изобретения, в котором аэростатные средства 10 для позиционирования устройства в атмосфере Земли содержат самый верхний аэростатный купольный блок 26 и второй аэростатный купольный блок 29, заполненные более легким, чем воздух, газом, и размещенные на различных высотах в атмосфере, чтобы разделить нагрузку, созданную более длинными и, соответственно, более тяжелыми бортовыми кабелями 30.
На ФИГ. 6, кроме того, показаны:
- первый бустерный блок 61 с первым бортовым контроллером 151, размещенным внутри самого верхнего аэростатного купольного блока 26 на бортовых кабелях 30 устройства,
- второй бустерный блок 62 со вторым бортовым контроллером 152, размещенным внутри подузла стабилизатора 46 купола самого верхнего аэростатного блока на бортовых кабелях 30 устройства,
- третий бустерный блок 63 с третьим бортовым контроллером 153, размещенным под стабилизатором 46 купола на бортовых кабелях 30 устройства,
- четвертый бустерный блок 64 с четвертым бортовым контроллером 154, размещенным внутри второго аэростатного купольного блока 29 на бортовых кабелях 30 устройства,
- пятый бустерный блок 65 с пятым бортовым контроллером 155, размещенным внутри второго аэростатного подузла стабилизатора 49 купола на бортовых кабелях 30 устройства,
- шестой бустерный блок 66 с шестым бортовым контроллером 156, размещенным под стабилизатором 49 купола на бортовых кабелях 30 устройства, и
- седьмой бустерный блок 67 с седьмым бортовым контроллером 157, размещенным под шестым бустерным блоком 66 на бортовых кабелях 30 устройства.
На ФИГ.7 показано, что система управления устройством по второму варианту осуществления распределена между главным контроллером 140 и семью бортовыми контроллерами с 151 по 157, размещенными на семи бустерных блоках с 61 по 67.
На ФИГ.7 показан также главный контроллер 140, в который входят контроллер устойчивости 146, контроллер высоты 147, контроллер проводной связи 148 и контроллер распределения мощности 149.
На ФИГ.7 изображен также главный контроллер 140, использующий шину подачи электроэнергии 122 и шину проводной связи 142 для взаимодействия с семью бортовыми контроллерами с 151 по 157.
На ФИГ.7 изображен также контроллер 149 распределения электрической энергии устройства, использующий шину подачи электроэнергии 122 и заданное количество однонаправленных электронных схем-вентилей 123 для распределения энергии на семь бустерных блоков с 61 по 67.
На ФИГ.7 далее показано, каким образом связываются контроллер устойчивости 146 и контроллер высоты 147 с семью бортовыми контроллерами с 151 по 157 через шину проводной связи 142, с использованием двунаправленных электронных схем-вентилей 143.
Контроллер устойчивости 146 используется для синхронизации скорости вращения блока круговой платформы 90 со скоростью вращения всех аэростатных блоков устройства.
Кроме того, контроллер устойчивости 146 устройства также управляет выравниванием вертикальных осей всех аэростатных блоков устройства с вертикальной осью блока круговой платформы 90.
На ФИГ.7 также представлен первый бустерный блок 61 и второй бустерный блок 62, управляющие устойчивостью самого верхнего аэростатного купольного блока 26 и аэростатного подузла стабилизатора 46 самого верхнего купола, посредством использования их бортовых контроллеров 151 и 152.
На ФИГ.7 показан также четвертый бустерный блок 64 и пятый бустерный блок 65, управляющие устойчивостью второго аэростатного купольного блока 29 и второго аэростатного подузла стабилизатора 49 купола, посредством использования их бортовых контроллеров 154 и 155.
На ФИГ.7, кроме того, показаны третий бустерный блок 63, шестой бустерный блок 66 и седьмой бустерный блок 67 как независимые бустерные блоки, использующие свои бортовые контроллеры 153, 156 и 157 для управления своей собственной высотой и устойчивостью.
Третий вариант осуществления настоящего изобретения представлен на ФИГ. 8.
На ФИГ.8 показана основная платформа 130 устройства, содержащая четыре рассчитанных на большое тяговое усилие воздушных винта 180, закрепленных на шарнирах, достаточно мощных для подъема и транспортировки основной платформы 130, чтобы передислоцировать устройство в другую зону обслуживания, при нахождении устройства в работающем состоянии.
На ФИГ.8 показаны также два воздушных винта 180, обеспечивающих большое тяговое усилие, выполненных в виде винтов для поднятия/опускания, и два воздушных винта, выполненные в виде винтов для горизонтального перемещения.
На ФИГ.8 изображено также воздушное командное летательное средство 200, дистанционно управляющее работой устройства во время его передислокации.
Тогда как приведенное выше письменное описание изобретения обеспечивает возможность специалисту среднего уровня в данной области техники выполнить и использовать изобретение таким образом, который в настоящее время считается наилучшим, им будут понятны и оценены ими по достоинству содержащиеся в нем вариации, комбинации и эквиваленты конкретного варианта осуществления, способа и примеров. Соответствующим образом данное изобретение не должно быть ограничено вышеописанным вариантом осуществления, способом и примерами, а характеризуется всеми вариантами осуществления и способами в рамках объема и сущности данного изобретения, в соответствии с его формулой.
Примечание к терминам
1. Имеется также перевод термина на русский язык - http://vyww.multitran.ru/: «сервисная нагрузка, полезный груз, полезная нагрузка, эксплуатационная нагрузка». Автор имел в виду, что, в данном конкретном случае, подразумевается максимальная масса полезного сервисного груза, которая допустима при эксплуатации устройства во время доставки и на высоте. Далее по тексту термин «эксплуатационная нагрузка» будет включать в себя также и понятие «сервисная нагрузка, полезный груз, полезная нагрузка».
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ПРОИЗВОДСТВА МИКРОВОДОРОСЛЕЙ, РАЗМЕЩЁННЫЙ В ВОДНОМ ПРОСТРАНСТВЕ | 2012 |
|
RU2610672C2 |
| АЭРОСТАТ ВЕТРОЭНЕРГЕТИЧЕСКИЙ | 2017 |
|
RU2662101C1 |
| АЭРОСТАТНОЕ УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОБЗОРА МЕСТНОСТИ | 2000 |
|
RU2182544C2 |
| АЭРОЭНЕРГОСТАТ | 2019 |
|
RU2703863C1 |
| ВИНДРОТОРНЫЙ АЭРОСТАТНО-ПЛАВАТЕЛЬНЫЙ ДВИГАТЕЛЬ | 2016 |
|
RU2637589C1 |
| СПОСОБ ЭЛЕКТРОСНАБЖЕНИЯ ПРИВЯЗНОГО АЭРОСТАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2449927C2 |
| Привязной аэростат с проектором | 2016 |
|
RU2657516C2 |
| Высотная ветровая энергетическая установка | 2015 |
|
RU2656175C2 |
| АЭРОВЕТРОЭНЕРГОСТАТ ПРОТИВООБЛЕДЕНИТЕЛЬНЫЙ | 2018 |
|
RU2679060C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |

Аэростатное грузоподъемное устройство содержит блок основной платформы, аэростатный купольный блок (20), заполненный более легким, чем воздух, газом, который имеет достаточную подъемную силу для удержания собственного веса и веса присоединенных бортовых кабелей (30). Функцию несения и удержания веса эксплуатационной нагрузки выполняют несколько аэростатных бустерных блоков (51), заполненных более легким, чем воздух, газом, разработанных с возможностью скользить по бортовым кабелям (30) и имеющих достаточную подъемную силу для удержания и несения собственного веса и веса эксплуатационной нагрузки до высоты ниже высоты купола, находящегося в наивысшей точке. Устройство сконструировано с возможностью вращения вокруг вертикальной оси. Изобретение направлено на обеспечение устойчивости. 14 з.п. ф-лы, 8 ил.
1. Аэростатное грузоподъемное устройство, содержащее:
a) блок основной платформы, закрепленный на наземном или надводном участке обслуживания, по меньшей мере, одним крепежным подузлом, при этом упомянутый блок основной платформы также содержит закрепленный в ее центре блок щита управления и блок круговой платформы, установленный сверху на упомянутом блоке основной платформы и способный вращаться вокруг упомянутого блока щита управления;
b) аэростатный купольный блок с, по меньшей мере, двумя бортовыми кабелями, при этом у каждого кабеля имеется первый конец и второй конец, причем первый конец прикреплен к упомянутому аэростатному купольному блоку, а второй конец прикреплен к упомянутому блоку круговой платформы, при этом упомянутый аэростатный купольный блок содержит также обод купола, ступицу купола, множество спиц купола и подузел оболочки купола, заполненной более легким, чем воздух, газом, причем, упомянутый подузел оболочки купола обладает достаточной подъемной силой, чтобы поддерживать вес упомянутого аэростатного купольного блока и вес упомянутых бортовых кабелей, при этом упомянутый аэростатный купольный блок содержит также подузел стабилизатора купола, установленный для снижения центра тяжести упомянутого купольного блока ниже его центра приложения подъемной силы; и
c) по меньшей мере, два аэростатных бустерных блока для одновременного переноса и размещения эксплуатационных нагрузок на различных высотах путем скольжения по упомянутым бортовым кабелям, причем упомянутые, по меньшей мере, два бустерных блока каждый содержат также цилиндрический корпус кольцевой формы, заполненный более легким, чем воздух, газом, для создания достаточной подъемной силы для поддержания своего собственного веса и веса эксплуатационной нагрузки, при этом упомянутые, по меньшей мере, два аэростатных бустерных блока каждый содержат также подузлы верхнего кольца и нижнего кольца и подузел секции эксплуатационной нагрузки, причем, упомянутый подузел секции эксплуатационной нагрузки размещен внутри упомянутого цилиндрического корпуса кольцевой формы и прикреплен к упомянутым подузлам верхнего и нижнего колец.
2. Устройство по п. 1, в котором упомянутый блок круговой платформы содержит также, по меньшей мере, две лебедки для регулирования длины упомянутых бортовых кабелей и высоты размещения упомянутого аэростатного купольного блока.
3. Устройство по п. 1, в котором упомянутый подузел стабилизатора купола содержит также обод стабилизатора, ступицу стабилизатора и множество спиц стабилизатора, при этом упомянутая ступица купола и упомянутая ступица стабилизатора соединены множеством жестких стержней.
4. Устройство по п. 1, в котором каждый из упомянутых бустерных блоков содержит также, по меньшей мере, два подузла устройств перемещения по кабелям, которые используются для автономного поднятия, опускания или фиксирования соответствующего бустерного блока на упомянутых бортовых кабелях.
5. Устройство по п. 1, в котором упомянутый блок щита управления содержит, по меньшей мере, один электрический двигатель, приводящий в действие подузел ведущей шестерни, способный вращать упомянутый блок круговой платформы вокруг упомянутого блока щита управления.
6. Устройство по п. 1, в котором упомянутые бортовые кабели представляют собой легкие многофункциональные кабели, способные переносить и распределять электрическую энергию по всем бортовым узлам устройства.
7. Устройство по п. 1, в котором каждый подузел нижнего кольца содержит также, по меньшей мере, два шарнирно закрепленных воздушных винта, выполненных в виде толкателей упомянутого бустерного блока в направлении вверх или вниз по упомянутым бортовым кабелям.
8. Устройство по п. 1, в котором упомянутый блок щита управления содержит также подузел генератора мощности.
9. Устройство по п. 1, в котором упомянутый обод купола содержит также, по меньшей мере, два воздушных винта с управлением с помощью гироскопа, установленных для вращения упомянутого купольного блока вместе с его прикрепленными бортовыми кабелями вокруг вертикальной оси устройства.
10. Устройство по п. 3, в котором упомянутый обод стабилизатора содержит также, по меньшей мере, два воздушных винта с управлением с помощью гироскопа, установленных для вращения упомянутого кольцевого блока стабилизатора вокруг вертикальной оси устройства.
11. Устройство по п. 1, в котором упомянутый аэростатный купольный блок содержит также бортовой контроллер.
12. Устройство по п. 1, в котором каждый подузел верхнего кольца содержит также, по меньшей мере, два шарнирно закрепленных воздушных винта, предназначенных для вращения упомянутого бустерного блока вокруг вертикальной оси устройства.
13. Устройство по п. 1, в котором упомянутый блок щита управления содержит также главный контроллер.
14. Устройство по п. 13, в котором в упомянутый главный контроллер входит также контроллер высоты для регулирования высоты аэростатных блоков устройства и контроллер устойчивости, используемый для синхронизации скорости вращения упомянутого блока круговой платформы со скоростью вращения всех аэростатных блоков устройства.
15. Устройство по п. 1, в котором упомянутый блок основной платформы содержит также четыре шарнирно закрепленных, рассчитанных на большие тяговые усилия воздушных винта, используемых для передислокации устройства, при этом управление упомянутыми шарнирно закрепленными, рассчитанными на большие тяговые усилия воздушными винтами осуществляется дистанционно с воздушного командного центра, когда блок основной платформы устройства находится в воздухе.
| US 5295625 A1, 22.03.1994; | |||
| Привязное подъемное устройство | 1990 |
|
SU1808766A1 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 1989 |
|
RU2028249C1 |
| Приспособление для направления движения текстильных тканей | 1930 |
|
SU19604A1 |

