Изобретение относится к информатике и может найти применение в системах сбора, преобразования, переработки информации в различных сферах человеческой деятельности: криминалистике, космонавтике.
Дистанционное зондирование Земли из космоса в интересах разведки полезных ископаемых, лесного хозяйства, экологии, мониторинга почвенных покровов осуществляют путем получения цифровых изображений подстилающей поверхности. Селективными признаками объектов на изображениях являются: цвет, тон, текстура, топология. Существуют многофункциональные программы редактирования, ретуширование изображений, работа со слоями в палитре RGB, CMYK, Lab и др. в интерактивном режиме [см., например, Минько П.А. Обработка графики в Photoshop CS2. М.: Изд. «Эксмо», 2007 г., стр.71-89, стр.145-151].
Пока не существуют универсальные методы автоматической идентификации объектов на изображениях. Наибольший объем информации для обнаружения объектов на изображениях и их идентификации содержится в их форме. Психологически, восприятие образов человеком-оператором происходит на уровне абриса, т.е. контура формы объекта. Контур - это край, где наиболее быстро изменяется градиент функции сигнала.
Известен способ выделения контура рисунка объекта [см., например, Дуда P.O., Харт П.Е. Распознавание образов и анализ сцен. Перев. с англ., М.: Мир, 1976 г., §7-3, «Пространственное дифференцирование», стр.287-288, рис.7.3] - аналог. Контурный рисунок получают путем вычисления градиента скалярной функции яркости I(х, у) видеоизображения в каждой точке как:
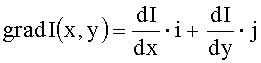
Для получения контурного рисунка выбирают регулярный оператор с апертурой окна |2×2| элемента:
Элементы окна связаны по диагоналям (двум взаимно ортогональным направлениям) операцией вычитания. Вычисляют оператор Робертса в каждой точке:
R(i, j)=|I(i, j)-I(i+1, j+1)|-|I(i+1, j)-I(i,j+1)|,
выводят на экран точки, для которых R(i, j)≥порог.
Недостатками аналога следует считать:
- не все признаки сигнала изображения используются для идентификации объекта, в частности в аналоге используют один параметр сигнала - амплитуду;
- недостаточная достоверность при визуальном анализе объекта оператором.
Ближайшим аналогом к заявляемому техническому решению является «Способ обнаружения аномалий подстилающей поверхности». Патент РФ №2160912, кл. G01V 8/00, 2000 г. Способ ближайшего аналога включает получение изображения подстилающей поверхности в виде цифровой матрицы функции яркости I(х, y) от пространственных координат, разбиение изображения на сравнительно однородные по тону участки на основе априорных данных, вычисление фрактальной размерности каждого участка, составление матрицы эталонов из коэффициентов фрактальной размерности каждого участка, разницы между текущим и эталонным значениями фрактальной размерности за пороговый уровень для анализируемого участка.
Недостатками ближайшего аналога являются:
- неопределенность разбиения изображения на мозаику участков, приводящая к погрешности вычисления фрактальной размерности;
- не все независимые признаки изображения используются при идентификации;
- малый интервал изменения функции фрактальной размерности изображения, в пределах 2,1…2,7, что снижает достоверность идентификации.
Задача, решаемая заявляемым способом, состоит в автоматической, достоверной идентификации объектов на изображениях путем выделения контурного рисунка объекта и количественного сравнения площади рельефа поверхности объекта внутри контура с эталоном.
Технический результат достигается тем, что способ автоматической идентификации объектов на изображениях включает сканирование исходного фотоизображения с высоким линейным и амплитудным разрешением, приведение матрицы полученных отсчетов I(х, y) к масштабу эталонной матрицы путем нормирования пикселов масштабным коэффициентом 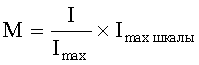
где: Imax шкалы - максимальная величина шкалы параметра используемого сканера;
Imax - максимальная амплитуда пиксела сигнала в матрице;
I - текущее значение пиксела сигнала в матрице.
Изобретение поясняется чертежами, где:
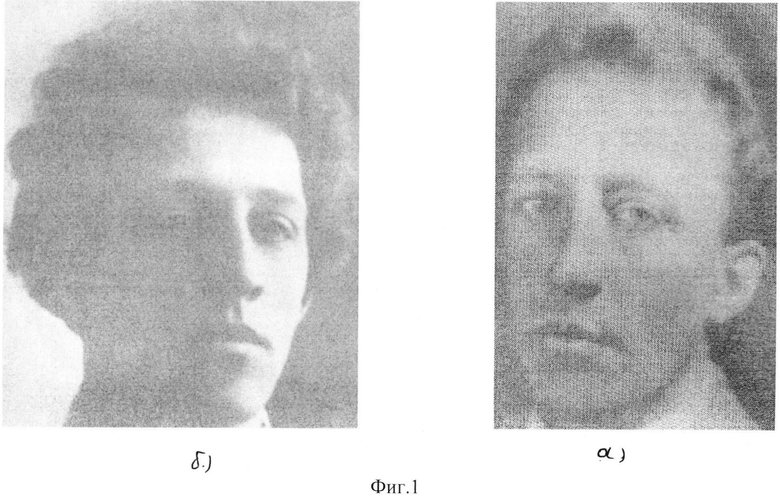
фиг.1 - исходное изображение;
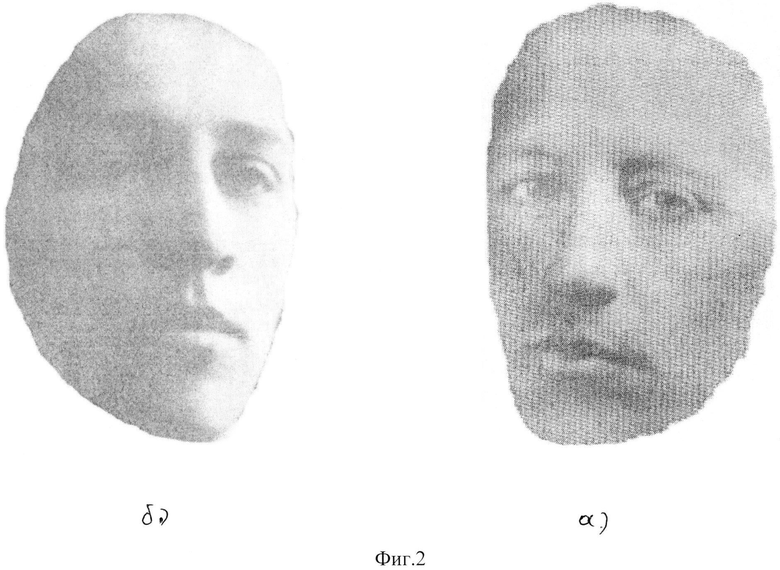
фиг.2 - контурный рисунок объекта в одном из слоев RGB;
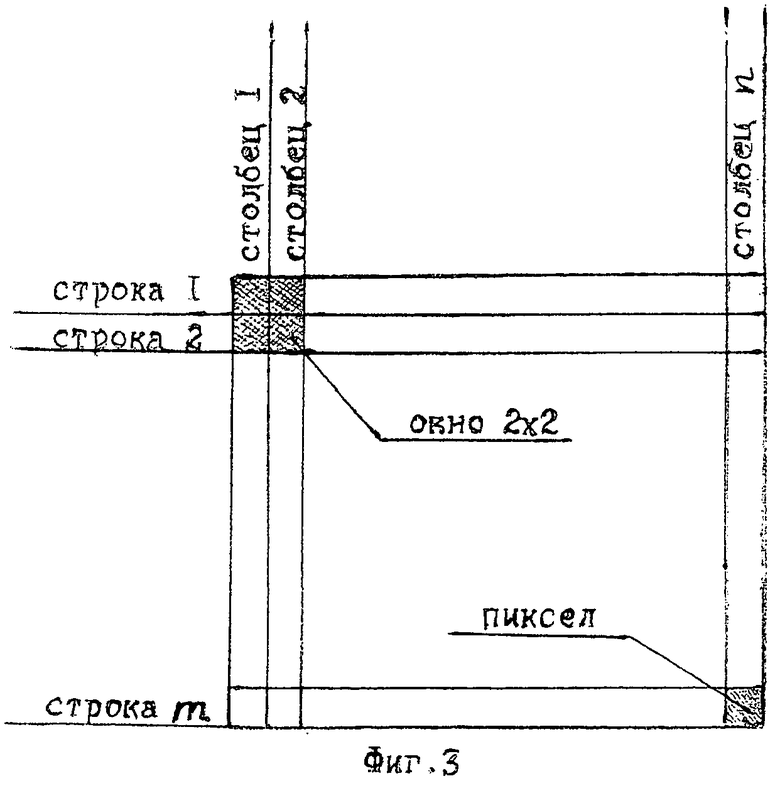
фиг.3 - последовательность разбиения матрицы изображения на окна;
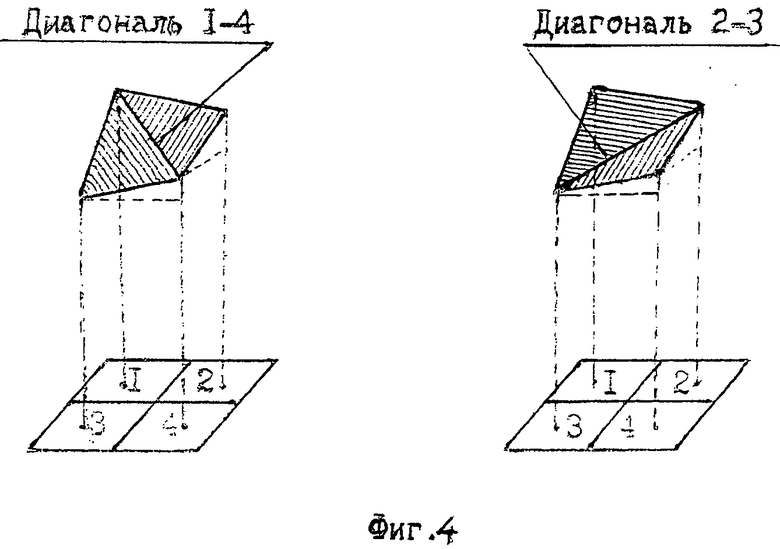
фиг.4 - разбиение окна на две пары смежных треугольников;
фиг.5 - функциональная схема устройства, реализующая способ.
Техническая сущность изобретения состоит в следующем. Многие научные задачи при дистанционных исследованиях из космоса решаются путем получения изображения подстилающей поверхности: обнаружение очагов землетрясений, выделение областей экологических аномалий, пожарищ, разведка объектов военной инфраструктуры, позиционных районов расположения войск и т.д.
До настоящего времени задача распознавания объектов на изображениях подстилающей поверхности решается, как правило, оператором по набору дешифровочных признаков. Как отмечалось выше, наибольший объем информации содержит форма объекта, а на изображении - его контурный рисунок. Самым высоким разрешением обладают фотоснимки с разрешением порядка 200 точек на 1 мм. Для цифровой обработки необходимо преобразовать изображение в цифровую матрицу, а всякое преобразование информации ведет к потерям. Для уменьшения потерь используют сканер высокого разрешения. Средняя яркость изображений зависит от условий съемки: времени суток, высоты Солнца, состояния среды (атмосферы), параметров аппаратуры.
Для исключения влияния перечисленных факторов на достоверность идентификации необходимо сравниваемые изображения привести к единому масштабу, т.е. пронормировать пикселы яркости исходной матрицы, умножив их амплитуду на масштабный коэффициент, упомянутый выше. После масштабирования исходного изображения осуществляют разложение матрицы на три ортогональных, в стандартной палитре цветов RGB. Методами пространственного дифференцирования функции сигнала матриц способа-аналога выделяют контурные рисунки объекта во всех трех каналах. Выделенный контурный рисунок в одном из каналов иллюстрируется фиг.2. Программа выделения контуров приведена ниже, в примере реализации. Идентификацию объектов по форме осуществляют путем расчета площади рельефа их поверхности в границах выделенных контуров в каналах R, G, В и сравнения их с эталонными значениями.
На фиг.3 представлена иллюстрация последовательности разбиения матрицы на окна из 4-х смежных пикселей. Каждый пиксель характеризуется разрешением по координатам Δx, Δy, амплитудой, глубиной ΔН, которые считаются известными из технических характеристик средств. Размер контура определяется числом строк и столбцов матрицы. Алгоритм вычисления элементарной площади окна четырехточечного шаблона основан на триангуляции, т.е. разбиении его диагоналями 1-4 и 3-2 на две пары смежных треугольников. Процедура разбиения иллюстрируется фиг.4. Площадь каждого треугольника вычисляют по формуле Герона. Предварительно, по теореме Пифагора, рассчитывают длины сторон треугольников. В соответствии с фиг.4 длины сторон треугольника, например, с вершинами 1-3-4 равны:


диагональ 
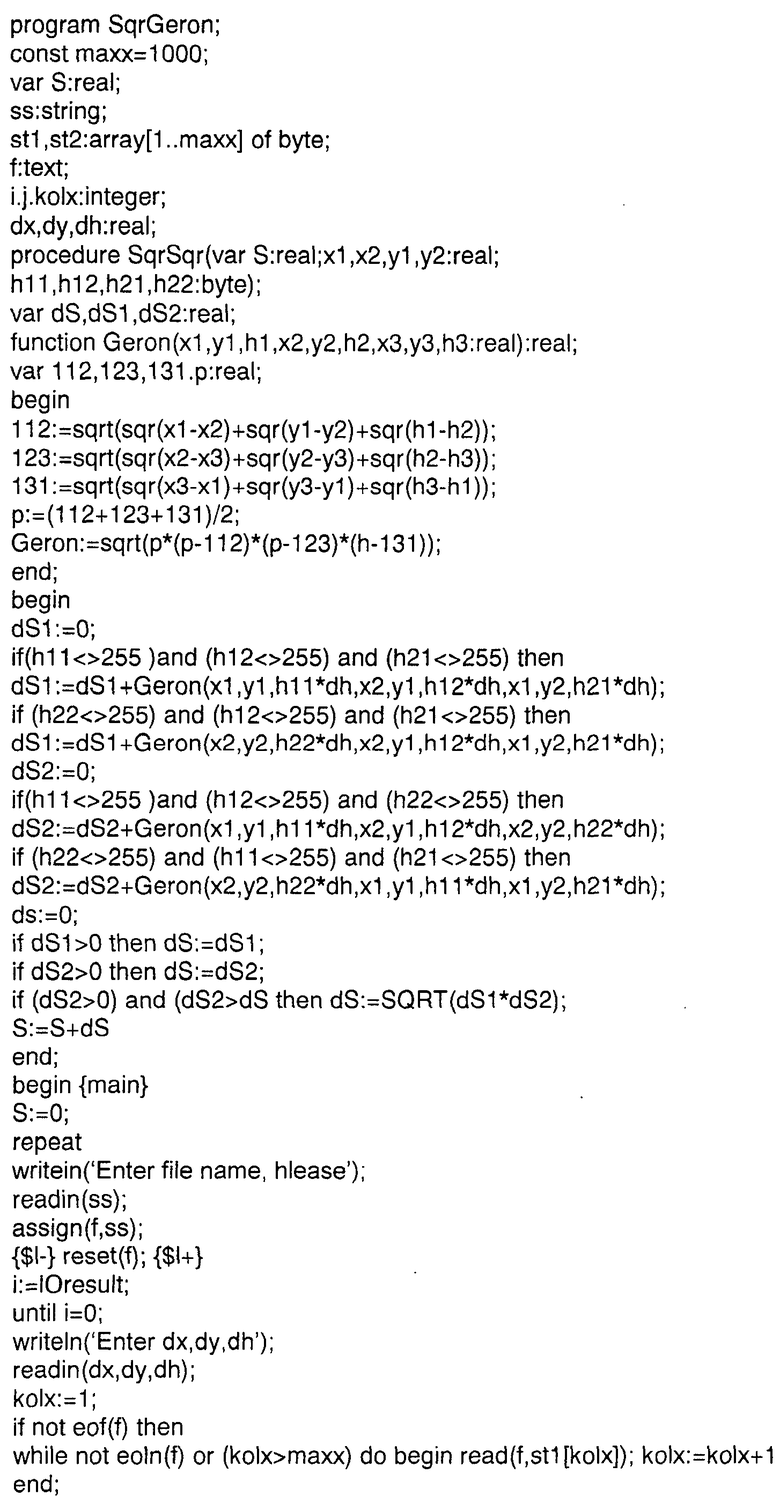
Существуют два способа триангуляции - по главной диагонали (слева-сверху - направо-вниз) и по вспомогательной диагонали (справа-сверху - налево-вниз). Площадь вычисляется обоими способами, а в качестве результата выбирается среднегеометрическое. Если хотя бы одна вершина треугольника находится за границей участка - площадь треугольника считается равной нулю. Если все вершины принадлежат участку, площадь треугольника вычисляется по формуле Герона.
Пример реализации способа.
Заявленный способ может быть реализован по схеме фиг.5. Функциональная схема устройства фиг.5 содержит аппаратно-программный вход-выход 1 сети Интернет, флеш-карту 2 клиентских изображений в одном из общеупотребимых форматов, цифровой сканер 3, преобразующий клиентские снимки в стандартной палитре цветов RGB в специальный формат, ПЭВМ 4 пограммной обработки изображений в стандартной конфигурации элементов: процессор 5, оперативное запоминающее устройство 6, винчестер 7, дисплей 8, принтер 9, клавиатура 10, реализованные на микропроцессорной базе видеокарты 11 эталонных объектов, цифровой дискриминатор сравнения объектов 12.
Процедура автоматической идентификации образов объектов состоит в следующем. Текущие изображения объектов, подлежащие идентификации, перекачиваются из «Интернета» или флеш-карты в ПЭВМ. Оператор осуществляет предварительную сортировку отображаемых на дисплее снимков визуально.
На фиг.1а представлено исходное изображение поэт А.А.Блок в 1920 г. В качестве эталонного использовано изображение А.А.Блока - студента Петербургского университета 1902 г., фиг.1б. Специализированной программой обработки изображений выделяют контурный рисунок объекта (контурный рисунок лица А.А.Блока)
Результат программной обработки иллюстрируется фиг.2. Затем вычисляют площадь поверхности рельефа внутри выделенного контура, для чего записывают на винчестер специализированную программу, текст которой приведен выше.
Обрабатываемый участок может иметь произвольную конфигурацию. Для его обработки следует выполнить выделение границы участка «залив» окрестности белым цветом (максимум яркости в шкале квантования принтера).
Для вычисления площади поверхности участка просматривается весь контур последовательно, шаблоном, из четырех соседних точек, образующих квадрат. Шаблон сканирует контур слева-направо, сверху-вниз, а для каждого элемента изображения вычисляется элементарная площадь, затем все элементарные площади суммируются. Для повышения точности расчета площади поверхности рельефа вычисления осуществляют двумя методами триангуляции, а суммарную площадь рельефа находят как среднегеометрическое 
Расчетные результаты параметров сигнала изображения составили:
RGB - изображение
Площадь рельефа Sr = 434346.935
Площадь проекции Sp = 59700.000
Максимальная интенсивность Imax = 255
Минимальная интенсивность Imin = 40
Средняя интенсивность Isr = 158.54935
Обработано точек count = 60200
Blue - изображение
Площадь рельефа Sr = 459476.328
Площадь проекции Sp = 59700.000
Максимальная интенсивность Imax = 255
Минимальная интенсивность Imin = 25
Средняя интенсивность Isr = 140.05271
Обработано точек count = 60200
Green - изображение
Площадь рельефа Sr = 415642.552
Площадь проекции Sp = 59700.000
Максимальная интенсивность Imax = 255
Минимальная интенсивность Imin = 48
Средняя интенсивность Isr = 161.33251
Обработано точек count = 60200
Red - изображение
Площадь рельефа Sr = 440343.389
Площадь проекции Sp = 59700.000
Максимальная интенсивность Imax = 255
Минимальная интенсивность Imin = 34
Средняя интенсивность Isr = 148.34257
Обработано точек count = 60200
Аналогичные вычисления параметров сигнала изображения эталона RGB изображения: Sp = 418218.659.
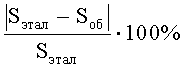
С возрастом (из-за морщин) площадь рельефа поверхности лица увеличивается, поэтому площадь эталона меньше площади анализируемого объекта. Критерий расхождения образа объекта с эталоном в суммарном канале RGB составил:

Поскольку в ортогональных каналах сигналы считаются статистически независимыми, результирующая достоверность идентификации образа объекта по трем ортогональным каналам (по вероятности) составит:
PΣ≈(1-0,961)3≈0,99996, т.е. расхождение в пятом знаке.
Эффективность способа определяется такими показателями, как оперативность, достоверность, документальность, воспроизводимость, точность.
Способ реализован на существующей технической базе. ПЭВМ типа «Intel», сканер типа «Panasonic» разрешением 1024 точки на дюйм, видеокарты типа «NVidia», имеющих в своем составе графический чип GTX 250 с 512 арифметико-логическими устройствами, а также оперативную память 2 Гбайт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ МЕТОДОМ НЕЧЕТКОЙ ТРИАНГУЛЯЦИИ ДЕЛОНЕ | 2018 |
|
RU2729557C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЗАГРЯЗНЕНИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2632176C1 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2675072C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2254599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТИПОВ РАСТИТЕЛЬНОСТИ | 2003 |
|
RU2242716C2 |
| СПОСОБ ВЫЧИСЛЕНИЯ ЗАПАСА ЛЕСНЫХ МАССИВОВ | 2003 |
|
RU2242867C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ РЕЛЬЕФА | 2004 |
|
RU2253089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2702423C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 1997 |
|
RU2109304C1 |
Изобретение относится к информатике и может быть использовано для автоматической идентификации объектов на изображениях. Согласно способу производят сканирование исходного фотоизображения с высоким разрешением. Матрицу полученных отсчетов приводят к масштабу эталонной матрицы путем нормирования пикселей яркости масштабным коэффициентом. Производят разложение полученного изображения на три двумерные матрицы в палитре стандартных цветов RGB. Методами пространственного дифференцирования функции сигнала матриц выделяют контурные рисунки объектов. Поверхности рельефов объектов внутри выделенных контуров аппроксимируют мозаикой треугольников. Площадь мозаик в каждом из каналов рассчитывают по формуле Герона и производят сравнение полученных площадей рельефов поверхности объектов с их значениями для эталонов по критерию достоверности:
Технический результат - автоматизация распознавания с высокой достоверностью. 7 ил.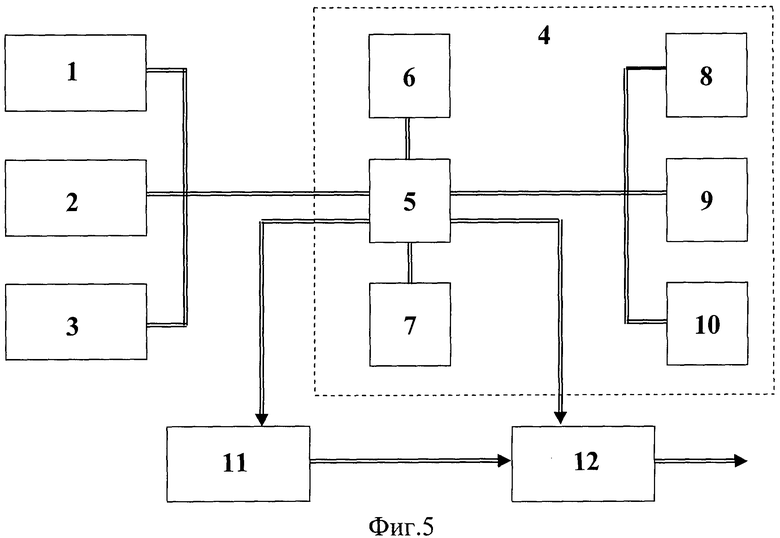
Способ автоматической идентификации объектов на изображениях включает сканирование исходного фотоизображения с высоким линейным и амплитудным разрешением, приведение матрицы полученных отсчетов I(х, y) к масштабу эталонной матрицы путем нормирования пикселов масштабным коэффициентом , разложение полученного изображения на три двумерные матрицы в стандартной палитре цветов RGB, выделение методами пространственного дифференцирования контурных рисунков объекта в каждом из каналов RGB, аппроксимацию поверхности рельефов объекта внутри выделенных контуров мозаикой треугольников в окнах |2×2| элементов, расчет по формуле Герона площадей мозаики треугольников в каждом из каналов, сравнение полученных площадей с их значениями для эталонных объектов в каждом из каналов и их суммой, идентификацию образа объекта по совпадению площадей поверхности рельефов объекта (Sоб) и эталона (Sэтал) с установленной достоверностью:
,
где: Imax шкалы - максимальная величина шкалы параметра используемого сканера;
Imax - максимальная амплитуда пиксела сигнала в матрице;
I - текущее значение пиксела сигнала в матрице.
| СПОСОБ ИДЕНТИФИКАЦИИ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ | 1999 |
|
RU2163394C2 |
| US 6181806 B2, 30.01.2001 | |||
| CN 102310771 A, 11.01.2012 | |||
| CN 101398886 A, 01.04.2009 | |||

