Изобретение относится к контролю технического состояния авиационных газотурбинных двигателей (ГТД) и может быть использовано для диагностики ГТД в процессе их эксплуатации в реальном времени.
В настоящее время довольно широко распространена вибрационная диагностика узлов и агрегатов ГТД, основанная на использовании в качестве функционального параметра вибраций деталей, узлов и агрегатов двигателя и расчетном определении по их значениям состояния ГТД. Данные методы основаны на том, что в процессе работы ГТД динамические процессы вызывают колебания корпуса, подшипников валов роторов, самих роторов, лопаток, установленных на роторах и пр. Для диагностирования узла ГТД измеряют вибрационный сигнал и по его анализу делают вывод о состоянии ГТД.
Известен способ диагностики технического состояния деталей, узлов и приводных агрегатов ГТД, включающий измерение и цифровую обработку вибросигналов с корпусных конструкций ГТД и приводных агрегатов с получением информации о техническом состоянии диагностируемых деталей, узлов и приводных агрегатов ГТД, причем измерение вибросигналов осуществляют дистанционно и бесконтактно посредством лазерного вибропреобразователя в приближенных к диагностируемым элементам информативных точках на поверхности корпусных конструкций ГТД и приводных агрегатов в пределах зон измерений, определяемых радиусом, преимущественно равным четверти длины изгибной волны в корпусных конструкциях, а цифровую обработку вибросигналов осуществляют с расчетом глубин модуляции на дискретных составляющих спектра огибающей вибрации в высокочастотном диапазоне колебаний корпусных конструкций ГТД и приводных агрегатов с получением информации о техническом состоянии диагностируемых деталей, узлов и приводных агрегатов ГТД, при этом перед измерениями вибросигналов лазерный вибропреобразователь размещают на оптимальном расстоянии перед зоной измерений и настраивают оптическую систему лазерного вибропреобразователя с фокусировкой луча лазерного излучения на одной из информативных точек на поверхности корпусных конструкций ГТД и приводных агрегатов вблизи диагностируемых деталей, узлов и приводных агрегатов ГТД в пределах зоны измерений, а перед измерением и цифровой обработкой вибросигналов предварительно проводят измерение и цифровую обработку вибросигналов при прокрутке двигателя для определения технического состояния подшипников в диагностируемых узлах ГТД и приводных агрегатах, а затем осуществляют измерение вибросигналов при запуске двигателя на режиме малого газа для определения технического состояния остальных деталей диагностируемых узлов ГТД и приводных агрегатов, включая ступени компрессоров низкого и высокого давления и соответствующих турбин, зубчатые приводы, редукторы, насосы, генераторы и регуляторы (см. патент РФ №2379645, кл. G01M 15/14, 2010 г.).
В результате анализа известного способа необходимо отметить, что он характеризуется весьма ограниченной областью использования. Данный способ невозможно использовать в полете, так как он требует специальных мест контроля на корпусе двигателя и проведения исследований в лабораторных условиях при снятии двигателя с крыла. В этом случае отсутствует оперативность и требуется большое время для установления текущего состояния двигателя. Кроме того, необходимость выбора «информативных точек», которая весьма субъективно, снижает точность диагностирования.
Известен способ вибродиагностики ГТД путем измерения и регистрации значений вибросигнала и частоты вращения ротора двигателя на переходных режимах, сравнения измеренного и заданного значений вибросигнала для характерных частот вращения и определения технического состояния двигателя по отклонению измеренного значения вибросигнала от эталонного, причем дополнительно измеряют и регистрируют значения вибросигнала и частоты вращения при регулировке топливной аппаратуры на минимальные и максимальные избытки топлива (см. а.с. СССР №1816986, кл. G01M 15/00, 1093 г.).
В результате анализа известного решения необходимо отметить, что ему присуща нестабильность, так как вибрация зависит в том числе от степени прогрева двигателя и времени переходных процессов, причем для некоторых моделей двигателей в конце переходных режимов приемистости отмечается увеличение вибраций в течение 2…5 секунд. Изложенное выше снижает точность и надежность вибродиагностики, особенно в полете. Кроме того, для обеспечения диагностирования двухвальных ГТД данный способ требует доработки.
Известен способ диагностики технического состояния межроторного подшипника двухвального ГТД, включающий измерение штатным датчиком и регистрацию вибросигналов с корпусных конструкций ГТД с последующим преобразованием их в амплитудно-частотный спектр, выделение в этом спектре сепараторной частоты межроторного подшипника и частот вращения ротора низкого давления (РНД) и ротора высокого давления (РВД) с последующим определением наличия дефекта межроторного подшипника, причем измерение сигналов вибрации производят на установившихся режимах вращения РВД не менее 90% его максимальной частоты вращения, развитие дефекта определяют по достижении величины амплитудного уровня сепараторной частоты не менее 2 мм/с и не более половины амплитудного уровня наибольшей по амплитуде частоты вращения РНД или РВД, а наличие развитого дефекта определяют по достижении величины амплитудного уровня сепараторной частоты не менее 2 мм/с и более, чем половина амплитудного уровня наибольшей по амплитуде частоты вращения РНД или РВД, при одновременном появлении отчетливо выделяющихся из уровня шума разностных частот (n2-fc) и/или (fc-n1), и/или (2*fc-n1), и/или (2*fc-n2), и/или (2*n1-fc), где n1 - частота вращения РНД (Гц), n2 - частота вращения РВД (Гц), fc - частота вращения сепаратора (Гц), при этом значение сепараторной частоты межроторного подшипника рассчитывают по формуле

где drol - диаметр тел качения;
dc - диаметр сепаратора (делительной окружности, проходящей через центры тел качения) (см., опубликованная заявка №2011130882, кл. G01M 13/04, 2013 г.) - наиболее близкий аналог.
В результате анализа известного способа необходимо отметить, что для него характерен ограниченный диапазон диагностики подшипника по режимам работы двигателя (более 90% максимальной частоты вращения РВД), а также весьма узкая область применения, так как приведенная формула вычисления сепараторной частоты ориентирована на конкретный тип подшипника.
Техническим результатом настоящего изобретения является повышение точности и надежности диагностики ГТД за счет определения неисправности трансмиссии каждого ротора отдельно, а также состояния межвального подшипника двигателя в широком диапазоне режимов работы двигателя независимо от конструкции межвального подшипника.
Указанный технический результат обеспечивается тем, что в способе вибродиагностики двухвального газотурбинного двигателя, включающем измерение значений вибрации роторов, сравнение их с заданным допустимым значением вибрации и по результатам сравнения определение состояния газотурбинного двигателя, новым является то, что одновременно с измерением вибрации измеряют частоту вращения каждого ротора и выделяют значение вибрации каждого ротора в зависимости от частоты его вращения, причем дополнительно по значениям частот вращения каждого ротора определяют расчетное значение частоты вращения и снимают значение вибрации на данной частоте, которое сравнивают с выделенными значениями вибрации каждого ротора, а также с заданным допустимым значением уровня вибрации двигателя на данной частоте и по результатам каждого сравнения определяют состояние газотурбинного двигателя.
Сущность изобретения поясняется чертежом, на котором представлена схема устройства для осуществления заявленного способа вибродиагностики двухвального ГТД.
Устройство, реализующее способ вибродиагностики двухвального ГТД 1, содержит датчик 2 вибрации (В) роторов ГТД. Выход датчика 2 связан с входом блока 3 формирования значения вибрации в зависимости от частоты вращения роторов. Данный блок может быть выполнен в виде стандартных узкополосных фильтров - первого 4, второго 5 и третьего 6, первые два из которых настроены на текущую частоту вращения валов роторов, а третий фильтр настроен на частоту, определяемую по формуле: f3=(K1*n1+K2*n2)/2, где n1 - частота вращения первого ротора, а n3 - частота вращения второго ротора, k1 и К2 заданные коэффициенты, или, например, по формуле: f3=(К1*n1/К2*n2).
Выход датчика 2 связан с первыми входами фильтров 4, 5, 6. Выходы фильтров 4 и 5 через усилители с заданными коэффициентами усиления, соответственно, 7 и 8, связаны с первыми входами первого 9 и второго 10 блоков сравнения. Выход фильтра 6 связан со вторыми входами блоков сравнения 9 и 10 и с первым входом третьего блока сравнения 11, со вторым входом которого связан задатчик 12 заданного допустимого значения уровня вибрации. Выходы блоков сравнения 9, 10, 11 связаны с информационным блоком 13. Устройство также содержит датчики 14 и 15 частоты вращения роторов ГТД. Датчики 14 и 15 связаны соответственно со вторыми входами фильтров 4 и 5, а также через усилители 16 и 17 с заданными коэффициентами усиления - с входами вычислителя 18 частоты, на которую настроен третий фильтр 6. Выход вычислителя связан со вторым входом третьего фильтра 6.
Устройство скомпоновано из известных блоков и элементов.
В качестве блока 13 сигнализации может быть использован известный блок звуковой, речевой сигнализации или световое табло, размещенное в кабине пилота.
Датчики 2, 14, 15 являются стандартными.
В качестве блоков сравнения 9, 10, 11 могут быть использованы широко известные логические блоки «И/ИЛИ».
В качестве усилителей 7, 8, 16, 17 могут быть использованы стандартные усилители.
В качестве вычислителя 18 может быть использован стандартный процессор, реализующий функцию f3=(K1*n1+K2*n2)/2 или функцию f3=(К1*n1/К2/*n2).
Заявленный способ, посредством описанного выше устройства, реализуют следующим образом.
В процессе работы ГТД посредством датчика 2 снимают значение вибрации роторов, а посредством датчиков 14 и 15 - частоту вращения роторов двигателя, соответственно f(n1) и f(n2).
Сигнал, характеризующий значение вибрации, с датчика 2 поступает на первые входы первого 4, второго 5 и третьего 6 узкополосных фильтров с плавающей частотой в зависимости от частот вращения роторов. На второй вход фильтра 4 поступают значения частоты вращения одного ротора, а на второй вход фильтра 5 - другого. В фильтрах 4 и 5 из общего спектра частот вибрации, измеряемой датчиком 2, выделяются значения амплитуд вибрации B1(fn1) и B2(fn2) на частотах, на которые настроен в конкретный момент времени каждый фильтр 4 и 5. Данные фильтры в каждый момент времени настраиваются на частоту, соответствующую частотам вращения роторов двигателя.
Параллельно сигналы с датчиков 14 и 15 через усилители 16 и 17 поступают на входы вычислителя 18, где определяется частота f3, на которую настраивается третий фильтр 6 по зависимости, приведенной выше. С выхода блока 18 сигнал (f3), поступает на второй вход третьего фильтра 6, в котором выделяется амплитуда вибрации В3(f3) на частоте f3 по одной из приведенных выше зависимостей.
С выходов фильтров 4 и 5 выработанные сигналы через усилители 7 и 8 поступают на первые входы первого 9 и второго 10 блоков сравнения, на вторые входы которых поступает сигнал с третьего фильтра 6. В блоках 9 и 10 происходит сравнение значения В3(f3) со значением B1(fn1) или B2(fn2), усиленными в усилителях 7 и 8, в случае если амплитуда В3(f3) превышает сигналы с усилителей 7 и 8, вырабатываются сигналы, характеризующие неисправность подшипника, которые передаются на информационный блок 13.
Параллельно выходной сигнал с фильтра 6 поступает на первый вход третьего блока сравнения 11, на второй вход которого подается сигнал с задатчика 12 заданного допустимого значения уровня вибрации. В блоке 11 при превышения величины амплитуды В3(f3) заданного допустимого значения уровня вибрации вырабатывается сигнал, характеризующий неисправность подшипника, который передается на информационный блок 13.
Достоинством данного устройства является повышение точности и надежности диагностирования ГТД за счет постоянного диагностирования состояния трансмиссии каждого ротора и межвального подшипника, что позволяет своевременно определить неисправность в трансмиссии ГТД.
Изобретение относится к контролю технического состояния авиационных газотурбинных двигателей (ГТД) и может быть использовано для диагностики ГТД в процессе их эксплуатации в реальном времени. Способ вибродиагностики двухвального газотурбинного двигателя включает измерение частоты вращения каждого ротора и выделение значений вибрации каждого ротора в зависимости от частоты его вращения, причем дополнительно по значениям частот вращения каждого ротора определяют расчетное значение частоты вращения и снимают значение вибрации на данной частоте, которое сравнивают с выделенными значениями вибрации каждого ротора, а также с заданным допустимым значением уровня вибрации двигателя на данной частоте и по результатам каждого сравнения определяют состояние газотурбинного двигателя. Технический результат изобретения - точность и надежность диагностики ГТД за счет определения неисправности трансмиссии каждого ротора отдельно, а также состояния межвального подшипника двигателя в широком диапазоне режимов работы двигателя независимо от конструкции межвального подшипника. 1 ил.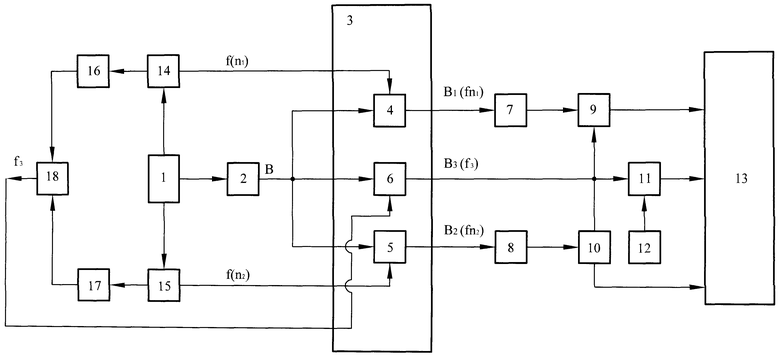
Способ вибродиагностики двухвального газотурбинного двигателя, включающий измерение значений вибрации роторов, сравнение их с заданным допустимым значением вибрации и по результатам сравнения определение состояния газотурбинного двигателя, отличающийся тем, что одновременно с измерением вибрации измеряют частоту вращения каждого ротора и выделяют значение вибрации каждого ротора в зависимости от частоты его вращения, причем дополнительно по значениям частот вращения каждого ротора определяют расчетное значение частоты вращения и снимают значение вибрации на данной частоте, которое сравнивают с выделенными значениями вибрации каждого ротора, а также с заданным допустимым значением уровня вибрации двигателя на данной частоте и по результатам каждого сравнения определяют состояние газотурбинного двигателя.
| RU2011130882A,27.01.2013 | |||
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДЕТАЛЕЙ, УЗЛОВ И ПРИВОДНЫХ АГРЕГАТОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2379645C2 |
| Способ вибродиагностирования газотурбинных двигателей | 1990 |
|
SU1816986A1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ДЕФЕКТА СМАЗКИ ПОДШИПНИКА КАЧЕНИЯ | 2011 |
|
RU2460053C1 |
| Замок для соединения смежных щитов разборно-переставной мелкощитовой опалубки | 1986 |
|
SU1444491A1 |
| US6687596B2,03.02.2004 | |||

