Предлагаемый способ и устройство относятся к области поисково-спасательных работ и могут быть использованы для поиска засыпанных биообъектов или их останков в районах землетрясений, а также в альпинизме при поиске биообъектов, засыпанных, например, снежными лавинами или горными обвалами.
Известны способы и устройства обнаружения местонахождения засыпанных биообъектов или их останков (патенты РФ №№2.085.997, 2.105.432, 2.116.099, 2.206.902, 2.248.235, 2.288.486, 2.370.792; патенты США №№4.129.868, 4.331.957, 6.031.482; патенты EP №№0.075.199, 1.746.433; Винокуров В.К. и др. Безопасность в альпинизме. - М., 183, С.136-137; Дикарев В.И. Безопасность, защита и спасение человека. - СПб, 2007, С.460-467, и другие).
Из известных способов и устройств наиболее близкими к предлагаемым является «Способ обнаружения местонахождения засыпанных биообъектов или их останков и устройство для его осуществления» (патент РФ №2.370.792, G01V 3/12, 2007), которые и выбраны в качестве базовых объектов.
Известные способ и устройство обеспечивают расширение функциональных возможностей путем определения расстояния до источника радиоизлучений (ИРИ) (засыпанного биообъекта или его останков). При этом используется корреляционная обработка и корреляционная функция R(τ) (фиг.8, а).
Однако в области максимума корреляционная функция R(τ) имеет малую крутизну и изменяется незначительно при изменениях τ, что снижает точность определения расстояния до ИРИ. Гораздо более благоприятной для поиска максимума является форма производной от корреляционной функции dR(τ)/dτ (фиг.8, б). В точке τ=0 производная имеет значительную крутизну и, кроме того, меняет знак в зависимости от положения относительно точки τ=0.
Таким образом, отыскание максимума корреляционной функции (максимальный принцип - экстремальная задача) заменяется минимальным принципом - стабилизацией нулевого значения регулируемой величины.
Кроме того, для определения направления на источник радиоизлучений (биообъект или его останки) используется антенна с широкой диаграммой направленности, у которой отсутствует ярко выраженная точка экстремума, что также снижает точность определения азимута (пеленга) на ИРИ. Для формирования узкой диаграммы направленности необходима сложная антенная система больших габаритов, что не всегда можно технически реализовать на практике. Целесообразно использовать вибраторную и рамочную антенны, которые формируют круговую и кардиоидную диаграммы направленности, т.е. используется метод минимума.
Следовательно, низкая точность определения дальности и азимута источника радиоизлучений приводят к низкой точности определения местонахождения засыпанных биообъектов или их останков.
Технической задачей изобретения является повышение точности определения местонахождения засыпанных биообъектов или их останков путем использования производной корреляционной функции, вибраторной и рамочной антенн.
Поставленная задача решается тем, что способ обнаружения местонахождения засыпанных биообъектов или их останков, основанный в соответствии с ближайшим аналогом на том, что предварительно размещают на биообъекте, относящемуся к группе риска, маломощный приемопередатчик, в качестве которого используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, формируют высокочастотное колебание с несущей частотой ωc, преобразуют его по частоте с использованием частоты ωг гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частоты ωпр1=ωг+ωс, усиливают его по мощности, облучают с помощью сканирующего блока засыпанный участок, под поверхностью которого может находиться биообъект или его останки, направленным электромагнитным сигналом, принимают его на засыпанном биообъекте или его останках, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, сформированный сигнал с фазовой манипуляцией переизлучают микрополосковой антенной в эфир, принимают его антенной сканирующего блока, усиливают по амплитуде, принятый сигнал с фазовой манипуляцией на первой промежуточной частоте ωпр1, повторно преобразуют по частоте с использованием несущей частоты ωc, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωс=ωг, регистрируют выделенный модулирующий код, соответствующий структуре встречно-штыревого преобразователя, анализируют его и определяют принадлежность засыпанного биообъекта или его останков, задерживают напряжение гетеродина на время τ, отличается от ближайшего аналога тем, что антенную систему сканирующего блока выполняют в виде вибраторной и рамочной антенн, которые закрепляют на платформе с возможностью ее вращения в горизонтальной плоскости, суммируют сложные сигналы с фазовой манипуляцией, принимаемые вибраторной и рамочной антеннами, формируя кардиоидную диаграмму направленности, суммарный сигнал усиливают по амплитуде, детектируют его и осуществляют деление продетектированного сигнала, принимаемого вибраторной антенной, на продетектированный суммарный сигнал, сравнивают полученное напряжение с пороговым напряжением и в случае его превышения, что соответствует совпадению нулевого провала кардиоидной диаграммы направленности с направлением на источник радиоизлучений, разрешают дальнейшую обработку принимаемых сигналов, в процессе которой осуществляют синхронное детектирование принимаемого сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2=ωГ, напряжение второй промежуточной частоты дифференцируют по времени и перемножают с напряжением гетеродина, задержанным на время τ, выделяют низкочастотное напряжение, пропорциональное производной корреляционной функции dR(τ)/dτ, усиливают его, изменяют время задержки τ до наступления равенства τ=0, поддерживают указанное равенство, что соответствует нулевому значению производной корреляционной функции dR(τ)/dτ, определяют расстояние R до засыпанного биообъекта или его останков, сравнивают по фазе сигнал, принимаемый вибраторной антенной с суммарным сигналом, формируют управляющее напряжение, амплитуда и полярность которого соответствуют степени и стороне отклонения нулевого провала кардиоидной диаграммы направленности от направления на источник радиоизлучений, воздействуют им на исполнительные органы платформы, устраняя возникшее рассогласование.
Поставленная задача решается тем, что устройство для обнаружения местонахождения засыпанных биообъектов или их останков, содержащее в соответствии с ближайшим аналогом приемопередатчик, размещенный на биообъекте, относящемся к группе риска, и выполненный в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, и сканирующий блок, состоящий из последовательно включенных задающего генератора, первого смесителя, второй вход которого соединен первым выходом гетеродина, усилителя первой промежуточной частоты, усилителя мощности, циркулятора, вход-выход которого связан с приемопередающей антенной, первого усилителя высокой частоты, второго смесителя, второй вход которого соединен с выходом задающего генератора, и усилителя второй промежуточной частоты, последовательно подключенных к второму выходу гетеродина блока регулируемой задержки, перемножителя и фильтра нижних частот, последовательно подключенных к второму выходу блока регулируемой задержки первого фазового детектора и компьютера, второй вход которого соединен с выходом блока регулируемой задержки, к второму выходу блока регулируемой задержки подключен индикатор дальности, отличается от ближайшего аналога тем, что сканирующий блок снабжен платформой, указателем угла, редуктором, сумматором, вторым усилителем высокой частоты, двумя амплитудными детекторами, блоком деления, пороговым блоком, усилителем, двумя ключами, вторым фазовым детектором, мотором и блоком формирования управляющего напряжения, причем приемопередающая антенна выполнена в виде антенной системы, состоящей из вибраторной и рамочной антенн, размещенных на платформе и подключенных через сумматор к последовательно соединенным второму усилителю высокой частоты, второму амплитудному детектору, блоку деления, второй вход которого через первый амплитудный детектор соединен с выходом первого усилителя высокой частоты, пороговый блок, первый ключ, второй вход которого соединен с выходом усилителя промежуточной частоты, и дифференциатор, выход которого соединен с вторым входом перемножителя, выход фильтра нижних частот через усилитель соединен с вторым входом блока регулируемой задержки, вход первого фазового детектора соединен с выходом первого ключа, к выходу первого усилителя высокой частоты последовательно подключен второй фазовый детектор, второй вход которого соединен с выходом второго усилителя высокой частоты, блок формирования управляющего напряжения и мотор, связанный через редуктор с платформой, редуктор снабжен указателем угла.
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1 и 3. Частотная диаграмма, иллюстрирующая процесс преобразования сигналов по частоте, изображена на фиг.2. Временные диаграммы, поясняющие работу устройства, представлены на фиг.4. Диаграмма направленности, пеленгационные характеристики и вид приемных антенн изображены на фиг.5, 6 и 7. Корреляционная функция R(τ) и ее производная dR(τ)/dτ показаны на фиг.8.
Устройство, реализующее предлагаемый способ, содержит сканирующий блок и приемопередатчик.
Сканирующий блок содержит последовательно включенные задающий генератор 1, первый смеситель 9, второй вход которого соединен с первым выходом гетеродина 8, усилитель 10 первой промежуточной частоты, усилитель 2 мощности, циркулятор 3, вход-выход которого связан с приемопередающей антенной 4, усилитель 5 высокой частоты, второй смеситель 11, второй вход которого соединен с выходом задающего генератора 1, усилитель 12 второй промежуточной частоты, первый ключ 34, фазовый детектор 6, второй вход которого через блок 23 регулируемой задержки соединен со вторым выходом гетеродина 8, перемножитель 20, второй вход которого через дифференциатор соединен с выходом первого ключа 34, фильтр 21 нижних частот, усилитель 22, блок 23 регулируемой задержки и индикатор 24 дальности. Перемножитель 20, фильтр 21 нижних частот, усилитель 22 и блок 23 регулируемой задержки образуют коррелятор 19.
Приемопередающая антенна 4 выполнена в виде антенной системы, состоящей из вибраторной 4.1 и рамочной 4.2 антенн, размещенных на платформе 26 и подключенных через сумматор 28 к последовательно соединенным второму усилителю 29 высокой частоты, второму амплитудному детектору 31, блоку 32 деления, второй вход которого через первый амплитудный детектор 30 соединен с выходом первого усилителя высокой частоты, пороговый блок 33, второй ключ 35, второй вход которого соединен с выходом первого усилителя 5 высокой частоты, второй фазовый детектор 37, второй вход которого соединен с выходом второго усилителя 29 высокой частоты, блок 39 формирования управляющего напряжения и мотор 40, связанный через редуктор 25 с платформой 26. Редуктор 25 снабжен указателем 27 угла. Второй вход первого ключа 34 соединен с выходом порогового блока 33. Блок 39 формирования управляющего напряжения и мотор 40 образуют блок 38 управления диаграммой направленности антенной системы.
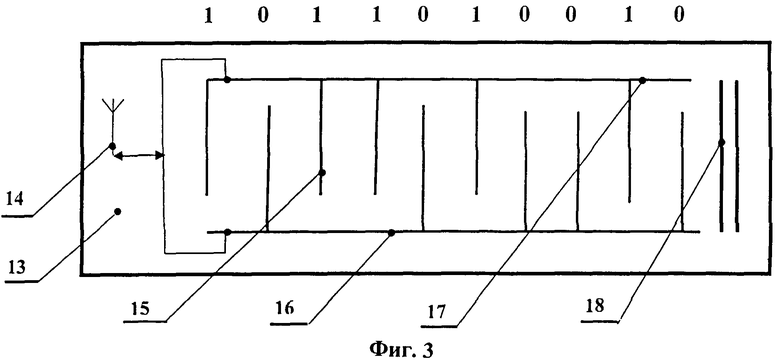
Приемопередающий блок выполнен в виде пьезокристалла 13 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной 14, и набором отражателей 18.
Встречно-штыревой преобразователь поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 15, шины 16 и 17, которые соединят электроды каждой из гребенок между собой. Шины 16 и 17, в свою очередь, связаны с микрополосковой антенной 14.
Предлагаемый способ реализуется следующим образом. Задающим генератором 1 формируется высокочастотное колебание (фиг.4, а)
uc(t)=Uccos(ωct+φc), 0≤t≤Tc,
где Uc, ωc, φс, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое поступает на первый вход первого смесителя 9, на второй вход которого подается напряжение гетеродина 8 (фиг.4, б)
uГ(t)=UГcos(ωГt+φГ).
На выходе смесителя 9 образуются напряжения комбинационных частот. Усилителем 10 выделяется напряжение первой промежуточной (суммарной) частоты (фиг.4, в)
uпр1(t)=Uпр1cos(ωпр1t+φпр1), 0≤t≤Tc
где 
K1 - коэффициент передачи смесителя;
ωпр1=ωс+ωГ - первая промежуточная (суммарная) частота;
φпр1=φс+φГ,
которое после усиления в усилителе 2 мощности через циркулятор 3 поступает в рупорную приемопередающую антенну 4 и излучается в эфир. С помощью рупорной антенны 4 последовательно облучается засыпанный участок, где предположительно находится биообъект или его останки.
Электромагнитный сигнал uпр1(t) принимается микрополосковой антенной 14 приемопередатчика, размещенного на биообъекте или его останках. Последний представляет собой пьезокристалл 13 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем ПАВ, который состоит из двух гребенчатых систем электродов 15, нанесенных на поверхность пьезокристалла 13. Электроды каждой из гребенок соединены друг с другом шинами 16 и 17. Шины, в свою очередь, связаны с микроволновой антенной 14.
Принцип работы встречно-штыревого преобразователя ПАВ основан на том, что переменные в пространстве и времени электрические поля, создаваемые в пьезоэлектрическом кристалле системой электродов, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде ПАВ. Поверхностные акустические волны - это волны, распространяющиеся вдоль поверхности твердых тел в относительно тонком поверхностном слое. Скорость распространения ПАВ в кристаллах примерно на пять порядков меньше скорости распространения электромагнитных колебаний. Это значит, что на сантиметре кристалла можно разместить информацию, которая заполнит кабель длиной в километр.
Высокая информационная емкость приборов на поверхностных акустических волнах впервые была использована в линиях задержки, которые позволяют хранить, преобразовывать, канализировать, отводить и отражать распространяющиеся в них сигналы.
В основе работы приборов на ПАВ лежат три физических процесса:
- преобразование входного электрического сигнала в акустическую волну;
- распространение акустической волны вдоль поверхности звукопровода;
- обратное преобразование ПАВ в электрический сигнал. Для прямого и обратного преобразования ПАВ используются преобразователи поверхностных акустических волн. Наиболее распространенные среди которых получили встречно-штыревые преобразователи.
Принимаемое гармоническое колебание uпр1(t) преобразуется встречно-штыревым преобразователем в акустическую волну, которая распространяется по поверхности пьезокристалла 13, отражается от набора 18 отражателей и опять преобразуется в электромагнитный сигнал с фазовой манипуляцией (ФМн) (фиг.4, д)
u2(t)=U2cos[ωпр1t+φk(t)+φпр1], 0≤t≤Ес,
где φк={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (фиг.4, ), причем φк(t)=const при kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, …, N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Тс=NτЭ).
При этом внутренняя структура сформированного ФМн-сигнала определяется топологией встречно-штыревого преобразователя, имеет индивидуальный характер и содержит всю необходимую уникальную информацию о владельце, например фамилия, имя, отчество, год рождения и т.п.
Сформированный ФМ-сигнал u2(t) излучается микрополосковой антенной 14 в эфир, принимается вибраторной 4.1 и рамочной 4.2 антеннами антенной системы 4 сканирующего блока и через циркулятор 3, сумматор 28, усилители 5, 29 и амплитудные детекторы 30, 31 поступает на два входа блока 32 деления.
Амплитуда сигнала на выходе амплитудного детектора 30 не зависит от направления прихода входного сигнала из-за круговой диаграммы направленности вибраторной антенны 4.1 (фиг.5).
Рамочная антенна 4.2 вместе с вибраторной антенной 4.1 образуют кардиоидную диаграмму направленности. Рамочная антенна 4.2 вместе с вибраторной антенной 4.1 образуют кардиоидную диаграмму направленности, которая вращается до совмещения нулевого провала с направлением прихода сигнала (фиг.5). Амплитуда сигнала с этого направления на выходе амплитудного детектора 31 близка к нулю, поэтому на выходе блока 32 деления в этот момент будет максимальным напряжение, которое с выхода блока 32 деления сравнивается с пороговым напряжением Uпор в пороговом блоке 33. Величина порогового уровня Uпор выставляется так, чтобы пороговый блок 33 срабатывал только от сигналов, приходящих с нулевого направления. При превышении порогового уровня пороговый блок 33 срабатывает и формирует постоянное напряжение, которое поступает на управляющие входы ключей 34 и 35, открывая их. В исходном состоянии ключи 34 и 35 всегда закрыты.
Сформированный ФМн-сигнал u2(t), излучаемый микрополосковой антенной 14, принимается вибраторной антенной 4.1 и через циркулятор 3 и усилитель 5 высокой частоты поступает на первый вход смесителя 11, на второй вход которого подается высокочастотное колебание uc(t) (фиг.4, а) с выхода задающего генератора 1 в качестве напряжения второго гетеродина. На выходе смесителя 11 образуются напряжения комбинационных частот. Усилителем 12 выделяется напряжение второй промежуточной (разностной) частоты (фиг.4, е)
uпр2(t-τ)=Uпр2cos[ωпр2(t-τ3)+φк(t-τ3)+φпр2], 0≤t≤Tc,
где 
ωпр2=ωпр1-ωC=ωГ - вторая промежуточная (разностная) частота;
φпр2=φпр1-φс=φГ;

R - расстояние до засыпанного биообъекта или его останков;
c - скорость распространения радиоволн,
которое через открытый ключ 34 поступает на вход дифференциатора 36 и на первый (информационный) вход первого фазового детектора 6. На второй (опорный) вход первого фазового детектора 6 подается напряжение UГ(t) со второго выхода гетеродина 8 через блок 23 регулируемой задержки. На выходе последнего образуется следующее напряжение
uГ1(t)=UГ(t-τ)=UГ1cos[ωГ(t-τ)+φГ],
где τ - время задержки блока 23 регулируемой задержки.
Напряжение uпр2(t-τ3) с выхода усилителя 12 второй промежуточной частоты через открытый ключ 34 дифференциатора 36 поступает на первый вход перемножителя 20, на второй вход которого подается напряжение uГ1(t) с выхода блока 23 регулируемой задержки. Полученное на выходе перемножителя 20 напряжение пропускается через фильтр 21 нижних частот, на выходе которого формируется производная корреляционной функции dR(τ)/dτ. Усилитель 22 предназначен для поддержания нулевого значения производной корреляционной функции и подключен к выходу фильтра 21 нижних частот, воздействует на управляющий вход блока 23 регулируемой задержки и поддерживает вводимую им задержку τ равной нулю (τ=0), что соответствует минимальному (нулевому) значению производной корреляционной функции dR(τ)/dτ. Индикатор 24 дальности, связанный со шкалой блока 23 регулируемой задержки, позволяет непосредственно считывать измеренное значение дальности R до засыпанного биообъекта или его останков

При этом на второй вход первого фазового детектора 6 подается следующее напряжение
uГ1(t)=uГ(t-τз)=UГcos[ωГ(t-τз)+φГ],
которое используется в качестве опорного напряжения для синхронного детектирования принимаемого сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2uпр2(t-τз).
На выходе первого фазового детектора 6 образуется низкочастотное напряжение (фиг.4, ж)
uн(t)=Uнcosφk(t), 0≤t≤Tc,
где 
К2 - коэффициент передачи фазового детектора, пропорциональный модулирующему коду M(t) (фиг.4, г). Это напряжение вместе с измеренным значением дальности L регистрируются и анализируются в компьютере 7.
Если сканирующий блок размещен на подвижном объекте, то при его перемещении на выходе второго фазового детектора 37 и блока 39 формирования управляющего напряжения появляется управляющее напряжение, амплитуда которого определяется степенью отклонения нулевого провала антенной системы 4 от направления прихода сигналов, а полярность - стороной отклонения. Это напряжение воздействует на мотор 40, связанный через редуктор 25 с платформой 26, так что возникшее рассогласование устраняется.
Следящая система, состоящая из второго фазового детектора 37, блока 39 формирования управляющего напряжения, мотора 40, редуктора 25 и платформы 26, на которой установлена антенная система 4, состоящая из вибраторной 4.1 и рамочной 4.2 антенны, отрегулирована таким образом, что нулевой провал антенной системы 4 (кардиоиды) всегда совпадает с направлением прихода сигналов. При этом угловое перемещение сканирующего блока в процессе работы все время компенсируется соответствующим поворотом платформы 26.
К основным характеристикам устройства для обнаружения местонахождения биообъектов или их останков можно отнести следующие:
- мощность передатчика сканирующего блока, средняя - не более 100 мВт;
- частотный диапазон - 900…920 МГц;
- дальность обнаружения - не менее 2000 м;
- количество кодовых комбинаций - 232…2128;
- тип излучаемого сигнала - гармоническое колебание;
- тип отраженного (переизлученного) сигнала - широкополосный сигнал с фазовой манипуляцией (база сигнала B=Δfc Tc=200…1000, Δfc - ширина спектра);
- габариты приемопередатчика, размещаемого на биообъекте или его останках - 8×15×5 мм;
- срок службы приемопередатчика - не менее 20 лет;
- потребляемая приемопередатчиком мощность - 0 Вт.
Каждый предполагаемый участник мероприятий, которые могут сделать этого участника потенциально пострадавшим, относится к группе риска и должен быть снабжен дополнительно простым, надежным и миниатюрным устройством (типа брелка, кольца или небольшого медальона), которое не должно затруднять обычную жизнедеятельность владельца, но должно нести на себе необходимую уникальную информацию об этом владельце.
Второе важное требование к этому устройству - предоставляемая возможность дистанционного считывания несущей им информации неограниченное число раз, без какого бы то ни было участия владельца, и через продолжительное время, например после землетрясения. Этим требованиям удовлетворяют предлагаемые способ и устройство.
С точки зрения обнаружения сложные ФМн-сигналы обладают энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМн-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого широкополосный ФМн-сигнал в точке приема может оказаться замаскирован шумами и помехами. Причем энергия широкополосного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность широкополосных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку широкополосных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Широкополосные ФМн-сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять эти сигналы среди других сигналов и помех, действующих в той же полосе частот и в те же промежутки времени.
Таким образом, предлагаемый способ и устройство по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают повышение точности определения местонахождения засыпанных биообъектов или их останков. Это достигается за счет повышения точности измерения дальности и пеленга засыпанных биообъектов или их останков путем использования производной корреляционной функции dR(τ)/dτ, вибраторной и рамочной антенн, которые формируют кардиоидную диаграмму направленности.
Метод минимума производной корреляционной функции и метод минимума кардиоидной диаграммы направленности (прохождение через нуль), наряду с высокой точностью и чувствительностью, обладают еще одним весьма существенным преимуществом нулевых методов, а именно амплитуды входных сигналов и их флюктуации не оказывают влияния на результаты измерений
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2288486C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2306159C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2401438C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327498C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2248235C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2012 |
|
RU2514130C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370792C2 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |







Изобретение относится к области геофизики и может быть использовано для поиска засыпанных биообъектов или их останков. Заявлен способ обнаружения местонахождения засыпанных биообъектов или их останков и устройство для его осуществления. Устройство содержит сканирующий блок и приемопередатчик. Сканирующий блок содержит задающий генератор 1, усилитель 2 мощности, циркулятор 3, приемопередающую антенну 4, вибраторную антенну 4.1, рамочную антенну 4.2, усилители 5 и 29 высокой частоты, фазовые детекторы 6 и 37, компьютер 7, гетеродин 8, смесители 9 и 11, усилитель 10 первой промежуточной частоты, усилитель 12 второй промежуточной частоты, коррелятор 19, перемножитель 20, фильтр 21 нижних частот, усилитель 22, блок 23 регулируемой задержки, индикатор 24 дальности, редуктор 25, платформу 26, указатель 27 угла, сумматор 28, амплитудные детекторы 30 и 31, блок 32 деления, пороговый блок 33, ключи 34 и 35, дифференциатор 36, блок 38 управления диаграммой направленности, блок 39 формирования управляющего напряжения, мотор 40. Приемопередающий блок содержит пьезокристалл 13, микрополосковую антенну 14, электроды 15, шины 16 и 17, набор отражателей 18. Технический результат - повышение точности определения местонахождения засыпанных биообъектов или их останков. 2 н.п.ф-лы, 10 ил.
1. Способ обнаружения местонахождения засыпанных биообъектов или их останков, основанный на том, что предварительно размещают на биообъекте, относящемся к группе риска, маломощный приемопередатчик, в качестве которого используют пьезокристалл с нанесенным на его поверхность алюминиевым встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, формируют высокочастотное колебание с несущей частотой ωс, преобразуют его по частоте с использованием частоты ωг гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот, усиливают его по мощности, облучают с помощью сканирующего блока засыпанного участка, под поверхностью которого может находиться биообъект или его останки, направленным электромагнитным сигналом, принимают его на засыпанном биообъекте или его останках, преобразуют в акустическую волну, обеспечивают ее распространения по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну опять в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, сформированный сигнал с фазовой манипуляцией переизлучают микрополосковой антенной в эфир, принимают его антенной сканирующего блока, усиливают по амплитуде, принятый сигнал с фазовой манипуляцией на первой промежуточной частоте ωпр1 повторно преобразуют по частоте с использованием несущей частоты ωс, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωс=ωг, регистрируют выделенный модулирующий код, соответствующий структуре встречно-штыревого преобразователя, анализируют его и определяют принадлежность засыпанного биообъекта или его останков, отличающийся тем, что антенную систему сканирующего блока выполняют в виде вибраторной и рамочной антенны, которые закрепляют на платформе с возможностью ее вращения в горизонтальной плоскости, суммируют сложные сигналы с фазовой манипуляцией, принимаемые вибраторной и рамочной антеннами, формируя кардиоидную диаграмму направленности, суммарный сигнал усиливают по амплитуде, детектируют его и осуществляют деление продетектированного сигнала, принимаемого вибраторной антенной, на продетектированный суммарный сигнал, сравнивают полученное напряжение с пороговым напряжением и в случае его превышения, что соответствует совпадению нулевого провала кардиоидной диаграммы направленности с направлением на источник радиоизлучений, разрешают дальнейшую обработку принимаемых сигналов, в процессе которой осуществляют синхронное детектирование принимаемого сигнала с фазовой манипуляцией на второй промежуточной частоте ωпр2=ωг, напряжение второй промежуточной частоты дифференцируют по времени и перемножают с напряжением гетеродина, задержанным на время τ, выделяют низкочастотное напряжение, пропорциональное производной корреляционной функции dR(τ)/dτ, усиливают его, изменяют время задержки τ до наступления равенства τ=0, поддерживают указанное равенство, что соответствует нулевому значению производной корреляционной функции dR(τ)/dτ, определяют расстояние L до засыпанного биообъекта или его останков, сравнивают по фазе сигнал, принимаемый вибраторной антенной, с суммарным сигналом, формируют управляющее напряжение, амплитуда и полярность которого соответствуют степени и стороне отклонения нулевого провала кардиоидной диаграммы направленности от направления на источник радиоизлучений, воздействуют им на исполнительные органы платформы, устраняя возникшее рассогласование.
2. Устройство для обнаружения местонахождения засыпанных биообъектов или их останков, содержащее приемопередатчик, размещенный на биообъекте, относящемся к группе риска, и выполненный в виде пьезокристалла, с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной, и сканирующий блок, состоящий из последовательно включенных задающего генератора, первого смесителя, второй вход которого соединен с первым выходом гетеродина, усилителя первой промежуточной частоты, усилителя мощности, циркулятора, вход-выход которого связан с приемопередающей антенной, первого усилителя высокой частоты, второго смесителя, второй вход которого соединен с выходом задающего генератора и усилителя второй промежуточной частоты, последовательно подключенных к второму выходу гетеродина блока регулируемой задержки, перемножителя и фильтра нижних частот, последовательно подключенных к второму выходу блока регулируемой задержки первого фазового детектора и компьютера, второй вход которого соединен с выходом блока регулируемой задержки, к второму выходу блока регулируемой задержки подключен индикатор дальности, отличающееся тем, что сканирующий блок снабжен платформой, указателем угла, редуктором, сумматором, вторым усилителем высокой частоты, двумя амплитудными детекторами, блоком деления, пороговым блоком, усилителем, двумя ключами, вторым фазовым детектором, мотором и блоком формирования управляющего напряжения, причем приемопередающая антенна выполнена в виде антенной системы, состоящей из вибраторной и рамочной антенн, размещенных на платформе и подключенных через сумматор к последовательно соединенным второму усилителю высокой частоты, второму амплитудному детектору, блоку деления, второй вход которого через первый амплитудный детектор соединен с выходом первого усилителя высокой частоты, пороговому блоку, первому ключу, второй вход которого соединен с выходом усилителя промежуточной частоты, и дифференциатору, выход которого соединен с вторым входом перемножителя, выход фильтра нижних частот через усилитель соединен с вторым входом блока регулируемой задержки, второй вход первого фазового детектора соединен с выходом первого ключа, к выходу первого усилителя высокой частоты последовательно подключены второй фазовый детектор, второй вход которого соединен с выходом второго усилителя высокой частоты, блок формирования управляющего напряжения и мотор, связанный через редуктор с платформой, редуктор снабжен указателем угла.
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370792C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434253C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431870C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2306159C1 |
| СОСТАВ ДЛЯ УДАЛЕНИЯ АСФАЛЬТЕНОСМОЛОПАРАФИНОВЫХ ОТЛОЖЕНИЙ, ОБЛАДАЮЩИЙ ЭФФЕКТОМ ИНГИБИРОВАНИЯ КОРРОЗИИ НЕФТЕПРОМЫСЛОВОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2244101C1 |
| US 6031482 A , 29.02.2000 | |||

