Система контроля устойчивости функционирования узла связи
Изобретение относится к системам управления, а именно к системам управления территориально разнесенными объектами, и может быть использовано для контроля устойчивости функционирования подвижных объектов узла связи.
Узел связи (УС) по своему функциональному назначению относится к элементам системы связи, предназначенной для обеспечения обмена информацией должностным лицам органов управления с помощью имеющихся на их рабочих местах средств передачи (приема) информации. От устойчивой работы средств связи УС на информационных направлениях, организованных от узла связи, во многом зависит устойчивость управления подвижными объектами.
В ряде работ в основу контроля и оценки эффективности систем связи, в том числе узлов связи, положен принцип, заключающийся в представлении оценок эффективности в виде целевых функций, характеризующих количественно степень достижения системами поставленных целей в зависимости от результатов решения функциональных задач, например, обеспечение определенной совокупности информационных показателей [1]. При этом обобщенная оценка эффективности системы может быть построена путем композиции целевых функций отдельных функциональных задач с учетом их вклада в общую эффективность системы.
Однако при таком подходе к оценке эффективности необходимо учитывать большое количество параметров системы, что приводит к сложным и громоздким расчетам, а также не позволяет получить достоверные результаты контроля и оценки.
Возможно использование других методов контроля, в том числе основанных на учете эффективности функционирования узла связи.
Одной из таких мер по улучшению работоспособности УС является внедрение системы контроля устойчивости функционирования узла связи.
Целью изобретения является повышение устойчивости функционирования узла связи при работе его в полевых условиях и при наличии внешнего воздействия на средства передачи информации.
Поставленная цель достигается тем, что система контроля устойчивости функционирования узла связи состоит из диспетчерского пункта контроля, содержащего автоматизированное рабочее место (АРМ) диспетчера, блок программного анализа защищенности сети, устройство контроля уровня устойчивости функционирования узла связи (УФУС), IP-телефон, АРМ должностного лица (ДЛ), коммутатор локальной вычислительной сети (ЛВС) и кабельный ввод; подвижного объекта предоставления услуг связи (ОПУС), содержащего кабельный ввод, маршрутизатор, АРМ управления услугами связи, IP-телефон, сервер связи, межсетевой экран, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; первого подвижного объекта пользователей связи (ПОПС), содержащего кабельный ввод, коммутатор ЛВС, первое АРМ ДЛ, IP-телефон, второе АРМ ДЛ, третье АРМ ДЛ, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; второго ПОПС, содержащего кабельный ввод, коммутатор ЛВС, первое АРМ ДЛ, IP-телефон, второе АРМ ДЛ, третье АРМ ДЛ, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; подвижного объекта спутниковой связи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления станцией спутниковой связи (ССС), IP-телефон и станцию спутниковой связи; подвижного объекта радиорелейной связи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления радиорелейной станцией (РРС), IP-телефон и радиорелейную станцию (РРС); подвижного объекта радиосвязи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления радиостанциями, IP-телефон, первый блок сопряжения, коротковолновую (KB) радиостанцию, антенну KB радиостанции, второй блок сопряжения, ультракоротковолновую (УКВ) радиостанцию и антенну УКВ радиостанции; при этом первый вход-выход АРМ диспетчера диспетчерского пункта контроля соединен с первым входом-выходом блока программного анализа защищенности сети, второй вход-выход которого соединен с входом-выходом устройства контроля уровня УФУС, второй вход-выход которого соединен со вторым входом-выходом АРМ диспетчера, третий и четвертый входы-выходы которого подключены соответственно к входу-выходу IP-телефона и к первому входу-выходу коммутатора ЛВС, второй и третий входы-выходы которого подключены соответственно к входу-выходу АРМ ДЛ и к станционному входу-выходу кабельного ввода; линейный вход-выход кабельного ввода диспетчерского пункта контроля по стыку Ethernet соединен с первым линейным входом-выходом кабельного ввода подвижного объекта предоставления услуг связи (ОПУС), первый станционный вход-выход которого соединен с первым входом-выходом маршрутизатора, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления услугами связи, к входу-выходу сервера связи, к первому входу-выходу межсетевого экрана и к канальному входу-выходу ШРД радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны ШРД радиостанции, второй вход-выход АРМ управления услугами связи соединен с входом-выходом IP-телефона, вторые входы-выходы межсетевого экрана соединены со вторыми станционными входами-выходами кабельного ввода, вторые, третьи, четвертые, пятые и шестые линейные входы-выходы которого по стыку Ethernet подключены к кабельным вводам соответственно первого и второго ПОПС, подвижного объекта спутниковой связи, подвижного объекта радиорелейной связи и подвижного объекта радиосвязи; станционный вход-выход кабельного ввода первого ПОПС соединен с первым входом-выходом коммутатора ЛВС, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу первого АРМ ДЛ, к входам-выходам второго и третьего АРМ ДЛ и к канальному входу-выходу ШРД радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны ШРД радиостанции, второй вход-выход первого АРМ ДЛ соединен с входом-выходом IP-телефона, антенна ШРД радиостанции по эфиру соединена с антенной ШРД радиостанции подвижного объекта предоставления услуг связи (ОПУС); станционный вход-выход кабельного ввода второго ПОПС соединен с первым входом-выходом коммутатора ЛВС, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу первого АРМ ДЛ, к входам-выходам второго и третьего АРМ ДЛ и к канальному входу-выходу ШРД радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны ШРД радиостанции, второй вход-выход первого АРМ ДЛ соединен с входом-выходом IP-телефона, антенна ШРД радиостанции по эфиру соединена с антенной ШРД радиостанции подвижного объекта предоставления услуг связи (ОПУС); станционный вход-выход кабельного ввода подвижного объекта спутниковой связи соединен с первым входом-выходом коммутатора ЛВС, второй и третий входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления станцией спутниковой связи и к канальному входу-выходу станции спутниковой связи, второй вход-выход АРМ управления станцией спутниковой связи соединен с входом-выходом IP-телефона; станционный вход-выход кабельного ввода подвижного объекта радиорелейной связи соединен с первым входом-выходом коммутатора ЛВС, второй и третий входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления радиорелейной станцией и к канальному входу-выходу радиорелейной станции, второй вход-выход АРМ управления радиорелейной станцией соединен с входом-выходом IP-телефона; станционный вход-выход кабельного ввода подвижного объекта радиосвязи соединен с первым входом-выходом коммутатора ЛВС, второй, третий и четвертый входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления радиостанциями, к первым входам-выходам первого и второго блоков сопряжения, второй вход-выход первого блока сопряжения соединен с канальным входом-выходом коротковолновой радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны KB радиостанции, второй вход-выход второго блока сопряжения соединен с канальным входом-выходом ультракоротковолновой радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны УКВ радиостанции.
Повышение устойчивости функционирования УС достигается также и тем, что в предлагаемом изобретении использована система контроля уровня устойчивости, основанная на расчетах частных и обобщенного показателей устойчивости с помощью введенного в систему устройства контроля уровня устойчивости функционирования узла связи, содержащего блок ввода данных, блок расчета частных показателей устойчивости, блоки расчета устойчивости функционирования тракта прохождения информации, блок расчета коэффициента устойчивости функционирования узла связи, блок анализа результатов контроля и блок выдачи команд управления.
Сопоставимый анализ с известными решениями в данной области техники показывает, что заявляемая система контроля устойчивости функционирования узла связи отличается новой совокупностью признаков и методами решения поставленной задачи на основе «системы нечеткого вывода» [2]. При этом следует отметить, что на момент подачи данной заявки на изобретение такая совокупность признаков системы и методов решения таких задач не были выявлены.
Таким образом, заявляемая система контроля устойчивости функционирования узла связи соответствует критерию «новизна». Сравнение заявляемого решения с другими известными техническими решениями показывает, что выполнение элементов системы осуществляется достаточно просто и при этом не требуется дополнительного технического творчества.
Выполнение операций в предлагаемой системе контроля с использованием выбранного математического аппарата теории нечетких множеств приводит к повышению точности и достоверности результатов расчетов показателей системы контроля и соответственно к повышению устойчивости функционирования узла связи. Это позволяет сделать вывод о соответствии предлагаемой системы контроля устойчивости функционирования узла связи критерию «существенные отличия».
Заявляемое решение явным образом не следует из уровня техники и имеет изобретательский уровень.
Реализация предлагаемой системы контроля осуществлена с использованием существующих средств связи, средств вычислительной техники и программно-аппаратного комплекса, что подтверждает возможность ее промышленной реализации.
На фиг.1 приведена структурная схема системы контроля устойчивости функционирования узла связи, на фиг.2 представлена структурная электрическая схема устройства контроля уровня устойчивости функционирования узла связи (УФУС), а на фиг.3 показан алгоритм работы системы контроля устойчивости функционирования узла связи.
Система контроля устойчивости функционирования узла связи (фиг.1) состоит из:
1 - диспетчерского пункта контроля, содержащего:
2 - автоматизированное рабочее место (АРМ) диспетчера,
3 - блок программного анализа защищенности сети,
4 - устройство контроля уровня устойчивости функционирования узла связи (УФУС),
5 - IP-телефон,
6 - АРМ должностного лица (ДЛ),
7 - коммутатор локальной вычислительной сети (ЛВС),
8 - кабельный ввод;
9 - подвижного объекта предоставления услуг связи (ОПУС), содержащего:
10 - кабельный ввод,
11 - маршрутизатор,
12 - АРМ управления услугами связи,
13 - IP-телефон,
14 - сервер связи,
15 - межсетевой экран,
16 - широкодиапазонную радиостанцию (ШРД),
17 - антенну ШРД радиостанции;
18 - первого подвижного объекта пользователей связи (ПОПС), содержащего:
19 - кабельный ввод,
20 - коммутатор ЛВС,
21 - первое АРМ должностного лица (ДЛ),
22 - IP-телефон,
23 - второе АРМ ДЛ,
24 - третье АРМ ДЛ,
25 - широкодиапазонную радиостанцию (ШРД),
26 - антенну ШРД радиостанции;
27 - второго ПОПС, содержащего:
28 - кабельный ввод,
29 - коммутатор ЛВС,
30 - первое АРМ должностного лица (ДЛ),
31 - IP-телефон,
32 - второе АРМ ДЛ, 3 3-третье АРМ ДЛ,
34 - широкодиапазонную (ШРД) радиостанцию,
35 - антенну ШРД радиостанции;
36 - подвижного объекта спутниковой связи, содержащего:
37 - кабельный ввод,
38 - коммутатор ЛВС,
39 - АРМ управления станцией спутниковой связи (ССС),
40 - IP-телефон,
41 - станцию спутниковой связи;
42 - подвижного объекта радиорелейной связи, содержащего:
43 - кабельный ввод,
44 - коммутатор ЛВС,
45 - АРМ управления радиорелейной станцией (РРС),
46 - IP-телефон,
47 - радиорелейную станцию (РРС);
48 - подвижного объекта радиосвязи, содержащего:
49 - кабельный ввод,
50 - коммутатор ЛВС,
51 - АРМ управления радиостанциями,
52 - IP-телефон,
53 - первый блок сопряжения,
54 - коротковолновую (KB) радиостанцию,
55 - антенну KB радиостанции,
56 - второй блок сопряжения,
57 - ультракоротковолновую (УКВ) радиостанцию,
58 - антенну УКВ радиостанции.
Первый вход-выход АРМ диспетчера 2 диспетчерского пункта 1 контроля соединен с первым входом-выходом блока 3 программного анализа защищенности сети, второй вход-выход которого соединен с входом-выходом устройства 4 контроля уровня УФУС, второй вход-выход которого соединен со вторым входом-выходом АРМ диспетчера 2, третий и четвертый входы-выходы которого подключены соответственно к входу-выходу IP-телефона 5 и к первому входу-выходу коммутатора ЛВС 7, второй и третий входы-выходы которого подключены соответственно к входу-выходу АРМ ДЛ 6 и к станционному входу-выходу кабельного ввода 8.
Линейный вход-выход кабельного ввода 8 диспетчерского пункта 1 контроля по стыку Ethernet соединен с первым линейным входом-выходом кабельного ввода 10 подвижного объекта 9 предоставления услуг связи (ОПУС), первый станционный вход-выход которого соединен с первым входом-выходом маршрутизатора 11, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления 12 услугами связи, к входу-выходу сервера 14 связи, к первому входу-выходу межсетевого экрана 15 и к канальному входу-выходу ШРД радиостанции 16, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 17 ШРД радиостанции 16. Второй вход-выход АРМ управления 12 услугами связи соединен с входом-выходом IP-телефона 13, вторые входы-выходы межсетевого экрана 15 соединены со вторыми станционными входами-выходами кабельного ввода 10, вторые, третьи, четвертые, пятые и шестые линейные входы-выходы которого по стыку Ethernet подключены к кабельным вводам соответственно первого 18 и второго 27 ПОПС, подвижного объекта 36 спутниковой связи, подвижного объекта 42 радиорелейной связи и подвижного объекта 48 радиосвязи.
Станционный вход-выход кабельного ввода 19 первого 18 ПОПС соединен с первым входом-выходом коммутатора 20 ЛВС, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу АРМ ДЛ 21, к входам-выходам второго 23 и третьего 24 АРМ ДЛ и к канальному входу-выходу ШРД радиостанции 25, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 26 ШРД радиостанции 25. Второй вход-выход первого 21 АРМ ДЛ соединен с входом-выходом IP-телефона 22, антенна 26 ШРД радиостанции 25 по эфиру соединена с антенной 17 ШРД радиостанции 16 подвижного объекта 9 предоставления услуг связи (ОПУС).
Станционный вход-выход кабельного ввода 28 второго 27 ПОПС соединен с первым входом-выходом коммутатора 29 ЛВС, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу первого 30 АРМ ДЛ, к входам-выходам второго 32 и третьего 33 АРМ ДЛ и к канальному входу-выходу ШРД радиостанции 34, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 35 ШРД радиостанции 34, второй вход-выход первого 30 АРМ ДЛ соединен с входом-выходом IP-телефона 31, антенна 35 ШРД радиостанции 34 по эфиру соединена с антенной 17 ШРД радиостанции 16 подвижного объекта 9 предоставления услуг связи (ОПУС).
Станционный вход-выход кабельного ввода 37 подвижного объекта 36 спутниковой связи соединен с первым входом-выходом коммутатора 38 ЛВС, второй и третий входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления 39 станцией спутниковой связи и к канальному входу-выходу станции 41 спутниковой связи, второй вход-выход АРМ управления 39 станцией спутниковой связи соединен с входом-выходом IP-телефона 40.
Станционный вход-выход кабельного ввода 43 подвижного объекта 42 радиорелейной связи соединен с первым входом-выходом коммутатора 44 ЛВС, второй и третий входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления 45 радиорелейной станцией и к канальному входу-выходу радиорелейной станции 47, второй вход-выход АРМ управления 45 радиорелейной станцией соединен с входом-выходом IP-телефона 46.
Станционный вход-выход кабельного ввода 49 подвижного объекта 48 радиосвязи соединен с первым входом-выходом коммутатора 50 ЛВС, второй, третий и четвертый входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления 51 радиостанциями, к первым входам-выходам первого 53 и второго 56 блоков сопряжения, второй вход-выход первого блока 53 сопряжения соединен с канальным входом-выходом коротковолновой радиостанции 54, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 55 KB радиостанции 54, второй вход-выход второго 56 блока сопряжения соединен с канальным входом-выходом ультракоротковолновой радиостанции 57, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 58 УКВ радиостанции 57.
Устройство 4 контроля уровня устойчивости функционирования узла связи (фиг.2) содержит:
59 - блок ввода данных;
60 - блок расчета частных показателей устойчивости функционирования узла связи;
61 (611-61n) - блоки расчета устойчивости функционирования трактов прохождения информации (ТЛИ);
62 - блок расчета коэффициента устойчивости функционирования узла связи;
63 - блок анализа результатов контроля;
64 - блок выдачи команд управления.
Информационный выход блока 59 ввода данных соединен со входом блока 60 расчета частных показателей устойчивости функционирования узла связи, первый и n-й выходы которого подключены соответственно к первому и n-ому входам блоков 61 (611-61n) расчета устойчивости функционирования трактов прохождения информации (ТПИ), первый и n-й информационные выходы которых подключены соответственно к первому и n-ому входам блока 62 расчета коэффициента устойчивости функционирования узла связи, информационный выход которого соединен с информационным входом блока 63 анализа результатов контроля, первый и второй управляющие входы которого подключены к управляющим выходам соответственно блока 59 ввода данных и блока 60 расчета частных показателей устойчивости функционирования узла связи, информационный выход блока 63 анализа результатов контроля соединен с информационным входом блока 64 выдачи команд управления, при этом первый, второй и третий информационные входы блока 59 ввода данных являются первым, вторым и третьим информационными входами устройства 4 контроля уровня устойчивости функционирования узла связи, которые соединены с выходами соответственно устройства 3 анализа защищенности сети, АРМ управления 12 услугами связи и АРМ управления (39, 45, 51) средствами связи, первыми, вторыми и третьими информационными выходами устройства контроля уровня устойчивости функционирования узла связи являются первый, второй и третий информационные выходы блока 64 выдачи команд управления, которые соединены со входами соответственно АРМ управления 12 услугами связи, АРМ должностных лиц подвижных объектов (18, 27) связи и АРМ управления (39, 45, 51) средствами связи.
АРМ диспетчера 2 диспетчерского пункта 1 контроля предназначен для осуществления непрерывного сбора информации о состоянии средств связи узла, включая средства спутниковой и радиорелейной связи, радиосвязи (KB и УКВ радиосредств). При этом информация о состоянии средств связи включает данные о времени выхода из строя линии связи по причине отказа средства связи и времени ее восстановления, о времени выхода из строя линии связи из-за воздействия помех и времени ее восстановления.
АРМ диспетчера 2 обеспечивает:
1) ввод, хранение и отображение информации;
2) обмен информацией с взаимодействующими АРМ по сети Ethernet;
3) сбор, обобщение и отображение информации о состоянии связей, каналов и аппаратуры связи;
4) дистанционное управление аппаратурой из состава подвижного объекта в объеме возможностей, предусмотренных в аппаратуре;
5) решение информационных и расчетных задач по организации направлений обмена информацией и каналов связи.
Для выполнения указанных функций в составе портативного компьютера АРМ диспетчера 2 имеется функционально-прикладное программное обеспечение.
Автоматизированное рабочее место диспетчера 2 диспетчерского пункта 1 контроля выполнено с использованием персональной вычислительной машины (ПЭВМ) типа ЕС-1866, которая представляет собой многофункциональный терминал, дополненный аппаратными и программными средствами навигации, связи и передачи данных. Конструктивно ПЭВМ типа ЕС-1866 представляет собой переносной защищенный компьютер типа «Notebook», установленный на амортизационную раму с целью исключения его перемещения при нахождении подвижного объекта в движении.
Упомянутый компьютер содержит системный блок, видеомонитор, стандартную клавиатуру и графический манипулятор типа «мышь».
Блок 3 программного анализа защищенности сети диспетчерского пункта 1 контроля представляет собой анализатор, который с установленной периодичностью осуществляет сканирование средств автоматизации узла связи, включая сервер связи, АРМ диспетчера, АРМ управления услугами связи, АРМ ДЛ и АРМ управления средствами связи. При этом по имеющемуся в ней перечню IP-адресов определяется уязвимость упомянутых средств автоматизации к компьютерным атакам путем анализа следующих данных:
общее количество открытых «логических» портов средства автоматизации;
количество открытых «логических» портов средства автоматизации, на которых обнаружена уязвимость.
Блок 60 расчета частных показателей устойчивости функционирования устройства 4 контроля уровня предназначен для расчета частных показателей, включая расчет коэффициента исправного действия линий связи Кид (ЛС), коэффициента Ктг (ППИ) технической готовности внутриузлового пути прохождения информации (ППИ) и коэффициента Куяз (ППИ) уязвимости к компьютерным атакам средств автоматизации внутриузлового пути прохождения информации (ППИ).
При этом упомянутые коэффициенты рассчитываются по формулам, приведенным ниже:
1) коэффициента исправного действия линий связи (ЛС)
где:
Ти(ЛС)i - время исправной работы i-й линии связи (ЛС);
Т(ЛС)i - общее время работы i-й линии связи с учетом потери связи по вине корреспондирующего узла связи и помеховой обстановки;
2) коэффициента технической готовности j-го внутриузлового пути прохождения информации (ППИ) от средства первичной связи до оконечного устройства

где:
Ти(ППИ)j - время исправной работы технических средств, образующих j-й внутриузловой путь прохождения информации;
Тв(ППИ)j - время восстановления технических средств, образующих j-й внутриузловой путь прохождения информации;
3) коэффициента уязвимости к компьютерным атакам средств автоматизации j-го внутриузлового пути прохождения информации
где:
Муяз(ППИ)j - количество открытых «логических» портов средств автоматизации, входящих в j-й внутриузловой путь прохождения информации, на которых обнаружены уязвимости;
М(ППИ)j - общее количество открытых «логических» портов средств автоматизации, входящих в j-й внутриузловой путь прохождения информации.
Блоки 61 (611-61n) расчета устойчивости функционирования трактов прохождения информации предназначены для расчета коэффициентов путем объединения частных показателей устойчивости, полученных в соответствующем блоке, в коэффициент Куст(ТПИ) устойчивости функционирования тракта прохождения информации (ТПИ):
Kуст(TПИ)k=Кид(ЛС)i Ктг(ППИ)j Куяз(ППИ)j, k=1, n.
Объединение реализуется посредством мультипликативной свертки. Количество таких блоков 61 определяется исходя из количества (n) трактов прохождения информации, организуемых на узле связи.
Блок 62 расчета коэффициента устойчивости функционирования узла связи предназначен для объединения коэффициентов Куст(ТПИ) устойчивости функционирования трактов прохождения информации, организуемых от узла связи, в обобщенный коэффициент Куст(УС) устойчивости функционирования УС.
Объединение реализуется с помощью «системы нечеткого вывода» [3]. При этом «система» имеет n входов, на каждый из которых из блоков 61 поступает соответствующее значение коэффициента Куст(ТПИ) устойчивости функционирования тракта прохождения информации (ТПИ), и один выход, по которому на вход блока 63 поступает значение коэффициента Куст(УС) устойчивости функционирования узла связи. Для получения расчетного значения коэффициента Куст(УС) устойчивости функционирования узла связи используется алгоритм нечеткого вывода [3]. Отсюда следует, что на каждый из n входов блока 62 поступает соответствующее значение Куст(ТПИ), например, на первый вход поступает значение коэффициента Куст(ТПИ) первого тракта прохождения информации, а на n-й вход блока 62 поступает значение коэффициента Куст(ТПИ) n-го тракта прохождения информации. На выходе блока 62 получается обобщенный коэффициент Куст(УС) устойчивости функционирования узла связи, который передается на вход блока 63 анализа результатов контроля.
Блок 63 анализа результатов контроля производит сравнительный анализ рассчитанного коэффициента Куст(УС) устойчивости функционирования узла связи с требуемым значением. При получении значения коэффициента Куст(УС) устойчивости функционирования меньше требуемого производится анализ значений частных показателей, полученных из блока 60 расчета частных показателей устойчивости, и выявление технических средств узла связи, снижающих уровень устойчивости функционирования УС.
После выявления средств связи, работа которых снижает уровень устойчивости, с помощью блока 64 выдачи команд управления формируются следующие команды управления, которые передаются:
1) в АРМ управления средствами связи команды:
а) на изменение режимов работы средств связи;
б) на ремонт или замену средств связи;
в) на изменение системных настроек АРМ управления средствами связи, в том числе на закрытие портов, на которых обнаружены уязвимости;
2) в АРМ управления услугами связи команды:
а) на изменение настроек программного обеспечения (ПО) сервера связи, реализующего услуги связи;
б) на ремонт (замену) или перенастройку средств связи, образующих внутриузловые пути прохождения информации;
в) на изменение системных настроек АРМ управления услугами связи и сервера связи, в том числе на закрытие портов, на которых обнаружены уязвимости.
Результаты работы блока 63 анализа результатов контроля и блока 64 выдачи команд управления отображаются на АРМ диспетчера 2 диспетчерского пункта 1 контроля.
IP-телефоны 5, 13, 22, 31, 40, 46 и 52 предназначены для организации системы телефонной связи между должностными лицами по сети Ethernet через компьютеры автоматизированных рабочих мест, в которых программно реализована псевдоАТС (Un-PBX - Private Branch Exchange - Офисная телефонная станция, мини-АТС), возможности которой приведены в [4].
В качестве таких телефонных аппаратов могут быть использованы IP-телефоны типа «Круиз» или фирмы «Ericsson».
Автоматизированное рабочее место 6 должностного лица диспетчерского пункта 1 контроля предназначено для обмена информацией с другими АРМ по локальной вычислительной сети.
АРМ ДЛ 6 выполнено с использованием персональной вычислительной машины (ПЭВМ) типа ЕС-1866. Конструктивно ПЭВМ типа ЕС-1866 представляет собой переносной защищенный компьютер типа «Notebook», установленный на амортизационную раму с целью исключения его перемещения при нахождении подвижного объекта в движении.
Коммутаторы ЛВС 7, 20, 29, 38, 44 и 50 предназначены для организации доступа автоматизированных рабочих мест (АРМ) диспетчерского пункта 1 контроля, подвижного объекта 9 предоставления услуг связи и управления, первого 18 и второго 27 подвижных объектов пользователей связи, подвижного объекта 36 спутниковой связи, подвижного объекта 42 радиорелейной связи и подвижного объекта 48 радиосвязи к проводной сети Ethernet и обеспечения передачи по ней данных по стыку Ethernet 10/100 BASE TX между рабочими местами должностных лиц и по каналам связи.
В качестве упомянутых коммутаторов ЛВС могут быть использованы серийно выпускаемые промышленностью сетевые коммутаторы мобильные типа СКМ-8, разработанные ОАО «СИСТЕМПРОМ» (105066, г. Москва, ул. Н. Красносельская, дом 13, стр.1). Указанный коммутатор соответствует стандарту IEEE 802.3u Fast Ethernet 10/100 Base T/TX Switch, имеет сетевой интерфейс 10/100 Base T/TX (восемь портов с разъемами типа PC 10TB) и порт конфигурации для работы с VLAN (виртуальная ЛВС). Он обеспечивает дуплексный и полудуплексный режимы работы, поддерживает автоматическое определение скорости передачи 10/100 Мбит/с half/full duplex.
Кабельные вводы 8, 10, 19, 28, 37, 43 и 49 содержат присоединительные и коммутационные элементы, к которым с помощью кабельных разъемов подключаются внутриузловые линии связи (линии связи сети Ethernet). Они предназначены для распределения и коммутации информационных и управляющих цепей.
Конструктивно упомянутые кабельные вводы выполнены по однотипной схеме в соответствии с отраслевым стандартом, но отличаются количеством установленных на панелях кабельных вводов присоединительных разъемов и распайке пар подключенных кабелей.
Маршрутизатор 11 подвижного объекта 9 предоставления услуг связи предназначен для обеспечения маршрутизации и передачи графика по стыку Ethernet между подвижными объектами узла связи, а также для приема (передачи) графика из внешней сети связи общего пользования.
В качестве указанного маршрутизатора 11 может быть использован маршрутизатор фирмы «NETRIX» типа IP Network Exchange 2210 [4].
АРМ управления 12 услугами связи подвижного объекта 9 предоставления услуг связи осуществляют непрерывный сбор информации о состоянии сервера связи и средств связи, образующих внутриузловые пути прохождения информации, в том числе коммутаторов ЛВС, маршрутизатора, широкодиапазонных (ШРД) радиостанций, АРМ ДЛ и подключенных к ним IP-телефонов. При этом на АРМ управления 12 поступают следующие данные:
время выхода из строя средства связи, образующего тракт передачи данных, и время его восстановления;
время выхода из строя сервера связи и время его восстановления.
Сервер 14 связи представляет собой персональную электронную вычислительную машину (ЭВМ), выполняющую функции распределения услуг связи по рабочим местам должностных лиц в части обмена документальной информацией. Он предназначен для регистрации и определения соответствия между адресами различных устройств локальной вычислительной сети (ЛВС), управления механизмом разрешения адресов, обработки и передачи группового трафика, создаваемого клиентами в локальной вычислительной сети и формируемого запросами протокола.
Межсетевой экран 15 представляет собой средство защиты информации от воздействия внешних средств и предназначен для фильтрации графика, поступающего на подвижный объект 9 предоставления услуг связи от взаимодействующих подвижных объектов по сети Ethernet в соответствии с выбранными ограничениями по доступу к информации, в том числе к адресам абонентов, протоколам информационного обмена, времени приема (передачи), объему и содержимому пакетов информации.
Широкодиапазонные (ШРД) радиостанции 16 с антенной 17, 25 с антенной 26 и 34 с антенной 35 подвижного объекта 9 предоставления услуг связи, первого 18 и второго 27 подвижных объектов пользователей связи предназначены для образования радиоканалов в широком диапазоне частот, включая диапазоны коротких волн (KB), метровых волн (MB) и дециметровых волн (ДМВ), по которым обеспечивается обмен различной информацией между должностными лицами.
Указанные радиостанции являются многофункциональными приемопередающими станциями, выполненными в носимом варианте, состоящими из приемопередатчика, имеющего два антенных разъема для подключения антенн разного диапазона, разъемы для выдачи каналов, модуля сопряжения и антенных устройств.
Широкодиапазонные радиостанции 16, 25 и 34 построены с использованием компонентов современных программно-аппаратных средств с цифровой обработкой сигналов и обеспечивают построение радиосетей на основе иерархии ячеистых сетей, распределенно-опорной сети и сетей радиодоступа.
Антенны 17, 26 и 35 широкодиапазонных радиостанций являются приемопередающими антеннами, обеспечивающими возможность ведения радиосвязи в широком диапазоне волн.
Автоматизированные рабочие места должностных лиц 21, 23 и 24 первого подвижного объекта 18 пользователей связи (ПОПС) и АРМ ДЛ 30, 32 и 33 второго подвижного объекта 27 пользователей (ПОПС) выполнены с использованием персональной вычислительной машины (ПЭВМ) типа ЕС-1866, которая представляет собой многофункциональный терминал, дополненный аппаратными и программными средствами навигации, связи и передачи данных. Конструктивно ПЭВМ типа ЕС-1866 представляет собой переносной защищенный компьютер типа «Notebook», установленный на амортизационную раму с целью исключения его перемещения при нахождении подвижного объекта в движении.
Упомянутый компьютер содержит системный блок, видеомонитор, стандартную клавиатуру и графический манипулятор типа «мышь».
АРМ ДЛ 21, 23, 24, 30, 32 и 33 предназначены для выхода в локальную вычислительную сеть (ЛВС) и на каналы связи, образованные средствами узла связи, обеспечения передачи (приема) управленческой информации по каналам связи с взаимодействующими узлами связи, обмена электронной корреспонденцией и данными как между собой, так и с АРМ ДЛ подвижных объектов других узлов связи.
Автоматизированные рабочие места 39, 45 и 51 управления средствами связи выполнены с использованием персональной вычислительной машины (ПЭВМ) типа ЕС-1866, которая представляет собой многофункциональный терминал, дополненный аппаратными и программными средствами навигации, связи и передачи данных. Конструктивно ПЭВМ типа ЕС-1866 представляет собой переносной защищенный компьютер типа «Notebook», установленный на амортизационную раму с целью исключения его перемещения при нахождении подвижного объекта в движении.
Упомянутый компьютер содержит системный блок, видеомонитор, стандартную клавиатуру и графический манипулятор типа «мышь».
АРМ управления 39, 45 и 51 средствами связи предназначены для управления станцией спутниковой связи, радиорелейной станцией, KB и УКВ радиостанциями. Они осуществляют ввод, хранение и отображение управляющей информации о состоянии соответствующих станций, обмен обобщенной информацией с взаимодействующими АРМ (АРМ 12 подвижного объекта 9 предоставления услуг связи по сети Ethernet), решение информационных и расчетных задач по организации информационных направлений и трактов прохождения информации с взаимодействующими (корреспондирующими) узлами связи.
Станция 41 спутниковой связи предназначена для обеспечения дуплексной телефонной связи и передачи данных, а также для телефонной связи или межмашинного обмена в режиме удаленного абонента АТС при работе в сетях радиально-узловой связи по закрепленным каналам или каналам, работающим по принципам радио-АТС при непрерывной передаче информации.
Станция 41 спутниковой связи обеспечивает образование помехозащищенной линии спутниковой связи на скоростях от 1,2 до 9,6 кбит/с, в режимах без помехозащиты станция обеспечивает связь по цифровому спутниковому каналу со скоростью от 1,2 до 256 кбит/с в движении и с коротких остановок, а также обеспечивает спутниковую связь со скоростью до 2048 кбит/с на коротких остановках на автоматически развертываемую антенну.
В станции 41 спутниковой связи обеспечивается обобщенный контроль приемопередающего тракта, индикация режима работы станции и канала связи, аварии канала и отказа аппаратуры станции. Данные о состоянии станции поступают в компьютер АРМ управления 39 станцией и через него по сети ЛВС данные поступают в АРМ диспетчера 2 диспетчерского пункта 1 контроля.
Радиорелейная станция 47 предназначена для построения многопролетных цифровых радиорелейных линий связи. Она основана на использовании технологии DS-CDMA (Digital Signal-Code Division Multiple Access - Многостанционный доступ с кодовым разделением сигналов) и предназначена для обеспечения работы в полевых условиях на стоянке автономно или во взаимодействии с другими аналогичными станциями, имеющимися в составе узла связи. При этом может быть организовано до четырех радиорелейных направлений связи, одно направление широкополосного беспроводного доступа (ШБД) и обеспечена работа в сети по технологии STM-1. По каждому из радиорелейных направлений может быть обеспечена передача нескольких цифровых потоков Е1 и Е3, а также передача информации в сети Ethernet со скоростью обмена до 100 Мбит/с.
Радиорелейная станция 47 может работать в оконечном режиме, режиме ретрансляции и в режиме организации широкополосного беспроводного доступа (ШБД).
В радиорелейной станции 47 обеспечивается обобщенный контроль приемопередающего тракта, индикация режима работы станции, тракта и каналов связи, аварии тракта, канала и отказа аппаратуры станции. Данные о состоянии станции поступают в компьютер АРМ управления 45 радиорелейной станцией и через него по сети ЛВС данные поступают в АРМ диспетчера 2 диспетчерского пункта 1 контроля.
Подвижный объект 48 радиосвязи в составе кабельного ввода 49, коммутатора ЛВС 50, АРМ управления 51 радиостанциями, IP-телефона 52, первого 53 и второго 56 блоков сопряжения, KB радиостанции 54 с антенной 55 и УКВ радиостанции 57 с антенной 58 предназначен для построения KB и УКВ радиосетей на узле связи и обеспечения для должностных лиц подвижных объектов пользователей связи передачи (приема) по радиоканалам различного вида информации.
KB радиостанция 54 с антенной 55 предназначена для образования радиоканалов и выхода по ним в сети радиосвязи узла для связи с взаимодействующими узлами. Для сопряжения аналогового радиоканала станции с оконечным устройством передачи (приема) цифровой информации предназначен первый блок 53 сопряжения.
УКВ радиостанция 57 с антенной 58 предназначена для образования радиоканалов и выхода по ним в УКВ сети радиосвязи узла для связи с взаимодействующими узлами. Для сопряжения аналогового радиоканала станции с оконечным устройством передачи (приема) цифровой информации предназначен второй блок 56 сопряжения.
В указанных KB радиостанции 54 и УКВ радиостанции 57 обеспечивается обобщенный контроль приемопередающего тракта, индикация режима работы станции, каналов связи, аварии тракта, каналов и отказа аппаратуры станции. Данные о состоянии радиостанций поступают в компьютер АРМ управления 51 радиостанциями и через него по сети ЛВС данные поступают в АРМ диспетчера 2 диспетчерского пункта 1 контроля.
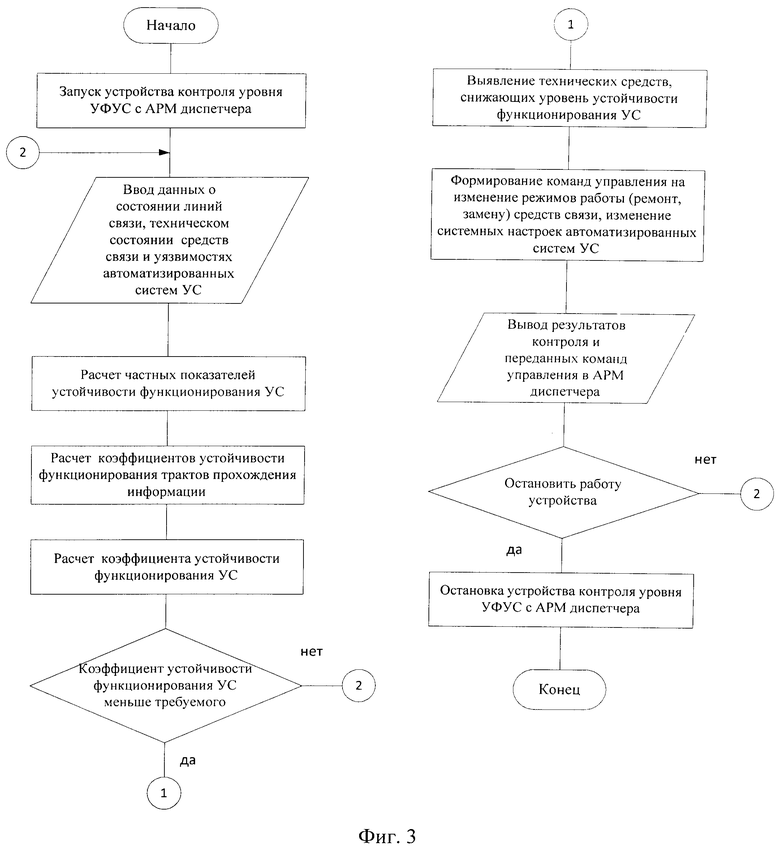
Работа системы контроля устойчивости функционирования узла связи производится в соответствии с алгоритмом, приведенным на фиг.3.
При этом работа системы контроля устойчивости функционирования УС начинается с запуска устройства 4 контроля уровня УФУС с помощью АРМ диспетчера 2 диспетчерского пункта 1, на которое поступают данные о состоянии линий связи, проложенных между взаимодействующими подвижными объектами связи и управления, данные о состоянии технических средств связи и уязвимости средств автоматизации управления.
На основе полученных данных с блока 59 ввода данных блок 60 расчета частных показателей устройства 4 осуществляет расчет частных показателей устойчивости функционирования узла связи, включая расчет коэффициента исправного действия линий связи (ЛС) Кид, коэффициента технической готовности Ктг(ППИ) каждого пути прохождения информации от средств связи первичной сети до оконечного устройства передачи информации на рабочих местах ДЛ и коэффициента Куяз(ППИ) уязвимости к компьютерным атакам средств автоматизации внутриузлового пути прохождения информации. Затем с помощью блоков 61 расчета производится расчет коэффициента Куст(ТПИ) устойчивости функционирования тракта прохождения информации.
Далее на основе данных, полученных на выходе блоков 61, в блоке 62 осуществляется расчет коэффициента устойчивости функционирования узла связи путем объединения коэффициентов устойчивости Куст(ТПИ) функционирования трактов прохождения информации в обобщенный коэффициент устойчивости Куст(УС) узла связи. Данные с выхода блока 62 анализируются блоком 63 анализа результатов контроля. При этом если полученное значение коэффициента устойчивости функционирования меньше требуемого, то производится выявление технических средств связи, работа которых снижает уровень устойчивости функционирования УС и формирование с помощью блока 64 команд управления для изменения режимов работы средств связи и изменения системных настроек средств автоматизации управления.
При соответствии полученного значения коэффициента Куст(УС) устойчивости функционирования узла связи требуемому производится возврат к началу работы, то есть к запуску в работу устройства 4 контроля уровня УФУС.
Результаты контроля и переданные команды управления отображаются в АРМ диспетчера 2 диспетчерского пункта 1 контроля.
Передача данных о состоянии средств связи в АРМ диспетчера 2 диспетчерского пункта 1 контроля осуществляется по линиям связи сети Ethernet и по радиоканалам, образованным с помощью широкодиапазонных (ШРД) радиостанций, установленных в подвижном объекте 9 предоставления услуг связи и в подвижных объектах (18 и 27) пользователей связи.
Таким образом происходят циклы контроля устойчивости функционирования УС при работе предлагаемой системы.
Работа системы контроля устойчивости функционирования узла связи заканчивается путем остановки устройства 4 с АРМ диспетчера 2 диспетчерского пункта 1 контроля.
Техническая эффективность предлагаемой системы контроля устойчивости функционирования узла связи заключается в повышении устойчивости функционирования узла связи при работе его в полевых условиях и при наличии внешнего воздействия на средства передачи информации, достигаемой за счет организации расширенного контроля состояния средств связи, трактов и каналов передачи информации, автоматического сбора данных о состоянии средств связи и средств передачи данных, своевременного доведения команд управления и их исполнения должностными лицами подвижных объектов связи, а также за счет внедрения устройства контроля уровня устойчивости функционирования узла связи, с помощью которого осуществляется расчет показателей устойчивости и проведение сравнительного анализа полученных результатов расчета коэффициента устойчивости функционирования с требуемыми значениями. При этом полученные результаты расчета коэффициента устойчивости функционирования узла связи позволяют должностным лицам по связи своевременно принимать решения по ремонту вышедших из строя средств связи или вводу новых средств связи, что в конечном итоге способствует улучшению качества предоставляемых пользователям услуг связи.
Источники информации1. Окунев Ю.Б., Плотников В.Г. Принципы системного подхода к проектированию в технике связи. - М.: Связь, 1976, с.91-97.
2. Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzy-ТЕСН. - СПб.: БХВ-Петербург, 2005. Глава 7. Системы нечеткого вывода, с.179-187.
3. ГОСТ 27.002-83 «Надежность в технике». Термины и определения.
4. Иванова Т.И. Абонентские терминалы и компьютерная телефония. - М.: Эко-Трендз, 1999, с.158-174, 213-227.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ СРЕДСТВ ПЕРЕДАЧИ ИНФОРМАЦИИ УЗЛА СВЯЗИ ОТ КОМПЬЮТЕРНЫХ АТАК | 2013 |
|
RU2540810C2 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2016 |
|
RU2629426C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ ПРЕДОСТАВЛЕНИЯ УСЛУГ СВЯЗИ | 2018 |
|
RU2701114C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ И РАДИОДОСТУПА | 2013 |
|
RU2506723C1 |
| ПОДВИЖНЫЙ МУЛЬТИСЕРВИСНЫЙ ТЕЛЕКОММУНИКАЦИОННЫЙ КОМПЛЕКС | 2022 |
|
RU2800724C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ СВЯЗИ, КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2017 |
|
RU2645285C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ ОПЕРАТИВНОЙ ТЕЛЕФОННОЙ И ДОКУМЕНТАЛЬНОЙ СВЯЗИ | 2018 |
|
RU2676081C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ УПРАВЛЕНИЯ И СВЯЗИ | 2015 |
|
RU2578805C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2014 |
|
RU2550734C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ УПРАВЛЕНИЯ СВЯЗЬЮ | 2017 |
|
RU2671808C1 |

Изобретение относится к системам управления, а именно к системам управления территориально разнесенными объектами,и может быть использовано для контроля устойчивости функционирования подвижных объектов узла связи. Технический результат изобретения заключается в повышении устойчивости функционирования узла связи при работе его в полевых условиях и при наличии внешнего воздействия на средства передачи информации. Система состоит из диспетчерского пункта контроля, содержащего автоматизированное рабочее место (АРМ) диспетчера, блок программного анализа защищенности сети, устройство контроля уровня устойчивости функционирования узла связи (УФУС), IP-телефон, АРМ должностного лица (ДЛ), коммутатор локальной вычислительной сети (ЛВС) и кабельный ввод; подвижного объекта предоставления услуг связи (ОПУС), содержащего кабельный ввод, маршрутизатор, АРМ управления услугами связи, IP-телефон, сервер связи, межсетевой экран, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; первого подвижного объекта пользователей связи (ПОПС), содержащего кабельный ввод, коммутатор ЛВС, первое АРМ ДЛ, IP-телефон, второе АРМ ДЛ, третье АРМ ДЛ, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; второго ПОПС, содержащего кабельный ввод, коммутатор ЛВС, первое АРМ ДЛ, IP-телефон, второе АРМ ДЛ, третье АРМ ДЛ, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; подвижного объекта спутниковой связи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления станцией спутниковой связи (ССС), IP-телефон и станцию спутниковой связи; подвижного объекта радиорелейной связи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления радиорелейной станцией (РРС), IP-телефон и радиорелейную станцию (РРС); подвижного объекта радиосвязи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления радиостанциями, IP-телефон, первый блок сопряжения, коротковолновую (KB) радиостанцию, антенну KB радиостанции, второй блок сопряжения, ультракоротковолновую (УКВ) радиостанцию и антенну УКВ радиостанции. 1 з.п. ф-лы, 3 ил.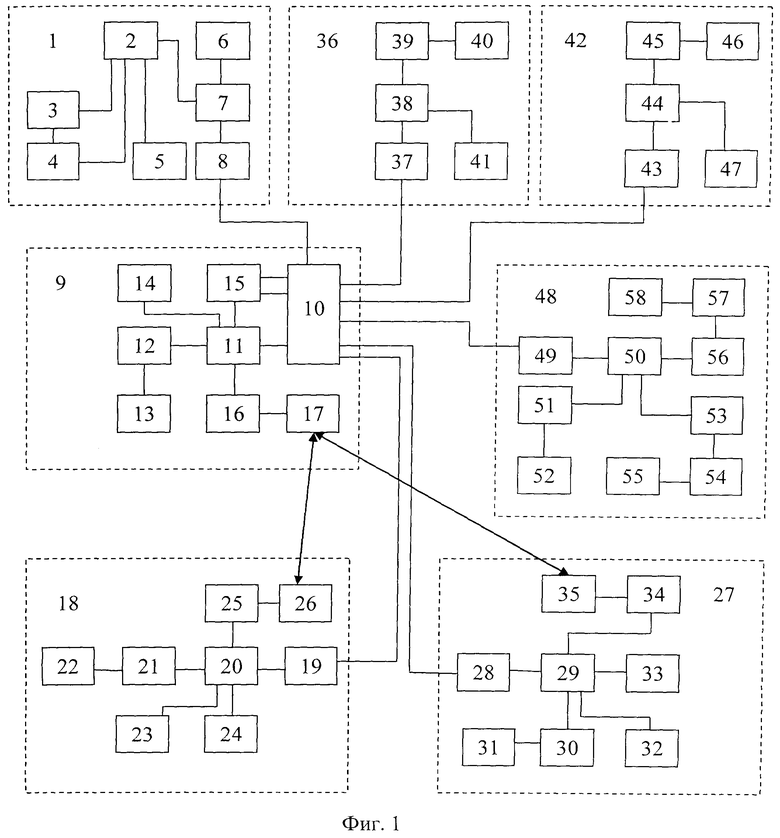
Система контроля устойчивости функционирования узла связи, состоящая из диспетчерского пункта контроля, содержащего автоматизированное рабочее место (АРМ) диспетчера, блок программного анализа защищенности сети, устройство контроля уровня устойчивости функционирования узла связи (УФУС), IP-телефон, АРМ должностного лица (ДЛ), коммутатор локальной вычислительной сети (ЛВС) и кабельный ввод; подвижного объекта предоставления услуг связи (ОПУС), содержащего кабельный ввод, маршрутизатор, АРМ управления услугами связи, IP-телефон, сервер связи, межсетевой экран, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; первого подвижного объекта связи (ПОПС), содержащего кабельный ввод, коммутатор ЛВС, первое АРМ ДЛ, IP-телефон, второе АРМ ДЛ, третье АРМ ДЛ, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; второго ПОПС, содержащего кабельный ввод, коммутатор ЛВС, первое АРМ ДЛ, IP-телефон, второе АРМ ДЛ, третье АРМ ДЛ, широкодиапазонную (ШРД) радиостанцию и антенну ШРД радиостанции; подвижного объекта спутниковой связи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления станцией спутниковой связи (ССС), IP-телефон и станцию спутниковой связи; подвижного объекта радиорелейной связи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления радиорелейной станцией (РРС), IP-телефон и радиорелейную станцию (РРС); подвижного объекта радиосвязи, содержащего кабельный ввод, коммутатор ЛВС, АРМ управления радиостанциями, IP-телефон, первый блок сопряжения, коротковолновую (KB) радиостанцию, антенну KB радиостанции, второй блок сопряжения, ультракоротковолновую (УКВ) радиостанцию и антенну УКВ радиостанции; при этом первый вход-выход АРМ диспетчера диспетчерского пункта контроля соединен с первым входом-выходом блока программного анализа защищенности сети, второй вход-выход которого соединен с первым входом-выходом устройства контроля УФУС, второй вход-выход которого соединен со вторым входом-выходом АРМ диспетчера, третий и четвертый входы-выходы которого подключены соответственно к входу-выходу IP-телефона и к первому входу-выходу коммутатора ЛВС, второй и третий входы-выходы которого подключены соответственно к входу-выходу АРМ ДЛ и к станционному входу-выходу кабельного ввода; линейный вход-выход кабельного ввода диспетчерского пункта контроля по стыку Ethernet соединен с первым линейным входом-выходом кабельного ввода подвижного объекта предоставления услуг связи (ОПУС), первый станционный вход-выход которого соединен с первым входом-выходом маршрутизатора, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления услугами связи, к входу-выходу сервера связи, к первому входу-выходу межсетевого экрана и к канальному входу-выходу ШРД радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны ШРД радиостанции, второй вход-выход АРМ управления услугами связи соединен с входом-выходом IP-телефона, вторые входы-выходы межсетевого экрана соединены со вторыми станционными входами-выходами кабельного ввода, вторые, третьи, четвертые, пятые и шестые линейные входы-выходы которого по стыку Ethernet подключены к кабельным вводам соответственно первого и второго ПОПС, подвижного объекта спутниковой связи, подвижного объекта радиорелейной связи и подвижного объекта радиосвязи; станционный вход-выход кабельного ввода первого ПОПС соединен с первым входом-выходом коммутатора ЛВС, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу первого АРМ ДЛ, к входам-выходам второго и третьего АРМ ДЛ и к канальному входу-выходу ШРД радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны ШРД радиостанции, второй вход-выход первого АРМ ДЛ соединен с входом-выходом IP-телефона, антенна ШРД радиостанции по эфиру соединена с антенной ШРД радиостанции подвижного объекта предоставления услуг связи (ОПУС); станционный вход-выход кабельного ввода второго ПОС соединен с первым входом-выходом коммутатора ЛВС, второй, третий, четвертый и пятый входы-выходы которого подключены соответственно к первому входу-выходу первого АРМ ДЛ, к входам-выходам второго и третьего АРМ ДЛ и к канальному входу-выходу ШРД радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны ШРД радиостанции, второй вход-выход первого АРМ ДЛ соединен с входом-выходом IP-телефона, антенна ШРД радиостанции по эфиру соединена с антенной ШРД радиостанции подвижного объекта предоставления услуг связи (ОПУС); станционный вход-выход кабельного ввода подвижного объекта спутниковой связи соединен с первым входом-выходом коммутатора ЛВС, второй и третий входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления станцией спутниковой связи и к канальному входу-выходу станции спутниковой связи, второй вход-выход АРМ управления станцией спутниковой связи соединен с входом-выходом IP-телефона; станционный вход-выход кабельного ввода подвижного объекта радиорелейной связи соединен с первым входом-выходом коммутатора ЛВС, второй и третий входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления радиорелейной станцией и к канальному входу-выходу радиорелейной станции, второй вход-выход АРМ управления радиорелейной станцией соединен с входом-выходом IP-телефона; станционный вход-выход кабельного ввода подвижного объекта радиосвязи соединен с первым входом-выходом коммутатора ЛВС, второй, третий и четвертый входы-выходы которого подключены соответственно к первому входу-выходу АРМ управления радиостанциями, к первым входам-выходам первого и второго блоков сопряжения, второй вход-выход первого блока сопряжения соединен с канальным входом-выходом коротковолновой радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны KB радиостанции, второй вход-выход второго блока сопряжения соединен с канальным входом-выходом ультракоротковолновой радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны УКВ радиостанции.
2. Система контроля по п.1, отличающаяся тем, что устройство контроля уровня устойчивости функционирования узла связи содержит блок ввода данных, блок расчета частных показателей устойчивости функционирования узла связи, n блоков расчета коэффициентов устойчивости функционирования трактов прохождения информации (ТПИ), блок расчета коэффициента устойчивости функционирования узла связи, блок анализа результатов контроля и блок выдачи команд управления, при этом информационный выход блока ввода данных соединен со входом блока расчета частных показателей устойчивости, первый и n-й выходы которого подключены соответственно к первому и n-ому входам блоков расчета коэффициентов устойчивости функционирования трактов прохождения информации (ТПИ), первый и n-й информационные выходы которых подключены соответственно к первому и n-ому входам блока расчета коэффициента устойчивости функционирования узла связи, информационный выход которого соединен с информационным входом блока анализа результатов контроля, первый и второй управляющие входы которого подключены к управляющим выходам соответственно блока ввода данных и блока расчета частных показателей устойчивости функционирования узла связи, информационный выход блока анализа результатов контроля соединен с информационным входом блока выдачи команд управления, при этом первый, второй и третий информационные входы блока ввода данных являются первым, вторым и третьим информационными входами устройства контроля уровня устойчивости функционирования узла связи, которые соединены с выходами соответственно устройства анализа защищенности сети, АРМ управления услугами связи и АРМ управления средствами связи, первыми, вторыми и третьими информационными выходами устройства контроля уровня устойчивости функционирования узла связи являются первый, второй и третий информационные выходы блока выдачи команд управления, которые соединены со входами соответственно АРМ управления услугами связи, АРМ должностных лиц подвижных объектов пользователей связи и АРМ управления средствами связи.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ ВОЕННЫХ ОБЪЕКТОВ | 2007 |
|
RU2342793C1 |
| НОВЫЕ КОМБИНАЦИИ НЕРАМЕКСАНА ДЛЯ ЛЕЧЕНИЯ НЕЙРОДЕГЕНЕРАТИВНЫХ РАССТРОЙСТВ | 2008 |
|
RU2432161C1 |
| EP 426911 A, 15.05.1991 | |||
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ СЕТЕЙ СВЯЗИ В УСЛОВИЯХ ВНЕШНИХ ДЕСТРУКТИВНЫХ ВОЗДЕЙСТВИЙ | 2008 |
|
RU2379753C1 |

