Изобретение относится к области прессового оборудования, а именно к управляющим устройствам для гидравлических прессов, и может быть использовано при создании новых и модернизации существующих гидравлических приводов подвижной траверсы, например, ковочных и штамповочных прессов.
Известен гидравлический привод подвижной траверсы пресса, содержащий рабочий и возвратные гидроцилиндры, гидрораспределители управления этими гидроцилиндрами, бак наполнения, напорную гидролинию, соединенную с насосно-аккумуляторной станцией, сливную гидролинию, соединенную с баком, находящимся под атмосферным давлением, и устройство декомпрессии рабочей жидкости в рабочем гидроцилиндре, состоящее из приемной объемной гидромашины и выходной объемной пневмомашины с установленным между их подвижными звеньями разделительным элементом, при этом входной канал приемной гидромашины гидравлически соединен с рабочей полостью рабочего гидроцилиндра [1].
В данном гидравлическом приводе приемная гидромашины выполнена в виде гидроцилиндра, рабочая полость которого гидравлически соединена посредством управляемых клапанов с рабочей полостью рабочего гидроцилиндра и с баком наполнения, выходная пневмомашина выполнена в виде пневмоцилиндра с герметично запираемой газовой полостью, а разделительный элемент устройства декомпрессии выполнен в виде механической передачи с переменным передаточным отношением (например, в виде копира, установленного на подвижном звене приемного гидроцилиндра с возможностью регулирования положения вдоль его оси и имеющего криволинейную рабочую поверхность для взаимодействия с подвижным звеном выходного пневмоцилиндра). При этом меньшее значение передаточного отношения механической передачи, представляющее собой отношение скоростей перемещения подвижных звеньев выходного пневмоцилиндра и приемного гидроцилиндра, соответствует большему значению координаты подвижного звена приемного гидроцилиндра, отсчитываемой от положения этого звена, при котором объем рабочей полости приемного гидроцилиндра минимален. Переменное передаточное отношение выбирается таким образом, чтобы при любом положении подвижного звена приемного гидроцилиндра в процессе декомпрессии (при расчетном начальном значении ррасч.н давления в рабочем гидроцилиндре пресса по окончании рабочего хода) получить полезное усилие, создаваемое жидкостью на этом звене, превышающее с небольшим запасом усилие, необходимое для перемещения при этом подвижного звена пневмоцилиндра в направлении уменьшения объема рабочей полости последнего. В итоге в процессе разгрузки рабочего гидроцилиндра от давления с использованием устройства декомпрессии в выходном пневмоцилиндре этого устройства посредством газа происходит аккумулирование энергии в результате преобразования части потенциальной энергии рабочей жидкости и металлоконструкций (в частности, колонн) пресса, запасенной в них к концу рабочего хода пресса вследствие упругих деформаций. Энергия сжатого газа, заключенного в рабочей полости выходного пневмоцилиндра устройства декомпрессии, используется далее для совершения полезной работы при выполнении последующих технологических операций изменения положения подвижной траверсы пресса.
Однако, если рабочий ход пресса заканчивается при давлении в рабочем гидроцилиндре, не достаточном при текущем значении передаточного отношения механической передачи устройства декомпрессии для перемещения подвижного звена приемного гидроцилиндра в направлении, соответствующем увеличению объема рабочей полости этого гидроцилиндра, то в указанной ситуации устройство декомпрессии не работает. В этом случае потенциальная энергия, накопленная вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, преобразуется в тепловую энергию (и в конечном итоге теряется, рассеиваясь в окружающую среду) в процессе выпуска жидкости из рабочего гидроцилиндра через наполнительно-сливной клапан. К тому же такая разгрузка рабочего гидроцилиндра от давления может сопровождаться нежелательными переходными процессами (гидравлическим ударом) в наполнительно-сливной гидролинии пресса.
При заниженном значении ррасч.н, принятом при проектировании механической передачи, и фактических значениях рфакт.н, давления в рабочем гидроцилиндре по окончании рабочего хода, превышающих величину ррасч.н, потенциальная энергия, накопленная во время рабочего хода (вследствие упругих деформаций жидкости и металлоконструкций пресса), теряется тем в большей степени, чем больше разность (рфакт.н - ррасч.н).
Кроме того, с помощью механической передачи устройства декомпрессии преобразование энергии при работе рассматриваемого гидропривода происходит дважды (сначала преобразование потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, в энергию сжатого газа, а затем преобразование энергии сжатого газа в механическую энергию жидкости), что сопровождается дополнительными потерями энергии, снижая энергетическую эффективность гидропривода пресса в целом.
Через механическую передачу устройства декомпрессии в процессе его работы передается значительное усилие, что (для обеспечения требуемых надежности и долговечности указанной передачи с переменным передаточным отношением) предопределяет высокие требования к ее конструкции и исполнению, повышая стоимость устройства декомпрессии.
В рассматриваемом гидроприводе выходной пневмоцилиндр устройства декомпрессии фактически является пневматическим аккумулятором и представляет собой устройство повышенной опасности для обслуживающего персонала. Необходимость в применении в составе устройства декомпрессии такого пневматического аккумулятора не является безусловной, если учесть, что питание гидропривода пресса рабочей жидкостью высокого давления производится от насосно-аккумуляторной станции, в состав которой входит пневмогидравлический аккумулятор.
Таким образом, конструкция известного гидравлического привода подвижной траверсы пресса обладает рядом недостатков, основным из которых является то, что в ряде ситуаций она не обеспечивает аккумулирование потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, для последующего совершения за счет упомянутой энергии полезной работы или позволяет это делать недостаточно эффективно.
Наиболее близким к заявляемому техническому решению является принятый в качестве прототипа гидравлический привод подвижной траверсы пресса, содержащий рабочий и возвратные гидроцилиндры, гидрораспределители управления этими гидроцилиндрами, бак наполнения, напорную гидролинию, соединенную с насосно-аккумуляторной станцией, сливную гидролинию, соединенную с баком, находящимся под атмосферным давлением, и устройство декомпрессии рабочей жидкости в рабочем гидроцилиндре, состоящее из приемной и выходной объемных гидромашин с установленным между их подвижными звеньями разделительным элементом, при этом входной канал приемной гидромашины гидравлически соединен с рабочей полостью рабочего гидроцилиндра, а выходной канал выходной гидромашины устройства декомпрессии посредством обратного клапана соединен с напорной гидролинией [2].
В указанном гидравлическом приводе приемная и выходная гидромашины выполнены в виде гидроцилиндров, при этом рабочая полость приемного гидроцилиндра гидравлически соединена посредством управляемых клапанов с рабочей полостью рабочего гидроцилиндра и со сливной гидролинией, а рабочая полость выходного гидроцилиндра посредством обратного клапана соединена с напорной гидролинией и посредством другого обратного клапана с баком наполнения. Разделительный элемент устройства декомпрессии выполнен в виде клиношарнирного механизма с переменным передаточным отношением, выбираемым таким образом, чтобы в ходе разгрузки рабочего гидроцилиндра от давления (в процессе декомпрессии) полезное усилие, создаваемое жидкостью на подвижном звене приемного гидроцилиндра, превышало с небольшим запасом усилие, необходимое для перемещения при этом подвижного звена выходного гидроцилиндра в направлении уменьшения объема рабочей полости последнего и вытеснения рабочей жидкости из выходного гидроцилиндра через соответствующий обратный клапан в напорную гидролинию пресса (и далее в аккумулятор насосно-аккумуляторной станции).
Однако такой выбор передаточного отношения возможен лишь для случая определенного расчетного начального значения ррасч.н давления рабочей жидкости в рабочем гидроцилиндре пресса по окончании рабочего хода подвижной траверсы. Если фактическое значение рфакт.н указанного давления будет больше расчетного, то потенциальная энергия, накопленная во время рабочего хода (вследствие упругих деформаций жидкости и металлоконструкций пресса), теряется тем в большей степени, чем больше разность (рфакт.н - ррасч.н). Если же, наоборот, в процессе работы пресса рфакт.н оказывается меньше ррасч.н, то устройство декомпрессии не работает из-за недостаточности силы давления жидкости для перемещения подвижного звена приемного гидроцилиндра. В последнем случае потенциальная энергия, накопленная вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, преобразуется в тепловую энергию (и в конечном итоге теряется, рассеиваясь в окружающую среду) в процессе выпуска жидкости из рабочего гидроцилиндра через наполнительно-сливной клапан. К тому же такой выпуск сжатой жидкости из рабочего гидроцилиндра может сопровождаться нежелательными переходными процессами (гидравлическим ударом) в наполнительно-сливной гидролинии пресса.
Полная потеря в ряде ситуаций потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, или недостаточно полное аккумулирование (сохранение) указанной энергии для последующего совершения за счет ее полезной работы являются основными недостатками известного гидропривода.
Еще одним недостатком рассматриваемого гидропривода является наличие механической передачи (в виде клиношарнирного механизма) с переменным передаточным отношением в конструкции устройства декомпрессии рабочего гидроцилиндра. Во-первых, через эту передачу в процессе разгрузки рабочего гидроцилиндра от высокого давления передается значительное усилие, что делает ее элементом ненадежности, а во-вторых, преобразование потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, с использованием устройства декомпрессии сопровождается дополнительными потерями энергии в механической передаче, что снижает энергетическую эффективность гидропривода пресса в целом.
Технической задачей, решаемой изобретением, является повышение энергетической эффективности (коэффициента полезного действия) гидропривода пресса путем сохранения для последующего использования потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, при ее минимальных потерях и вне зависимости от значения давления в рабочем гидроцилиндре по окончании рабочего хода подвижной траверсы.
Для решения поставленной задачи в известном гидравлическом приводе подвижной траверсы пресса, содержащем рабочий и возвратные гидроцилиндры, гидрораспределители управления этими гидроцилиндрами, бак наполнения, напорную гидролинию, соединенную с насосно-аккумуляторной станцией, сливную гидролинию, соединенную с баком, находящимся под атмосферным давлением, и устройство декомпрессии рабочей жидкости в рабочем гидроцилиндре, состоящее из приемной и выходной объемных гидромашин с установленным между их подвижными звеньями разделительным элементом, при этом входной канал приемной гидромашины гидравлически соединен с рабочей полостью рабочего гидроцилиндра, а выходной канал выходной гидромашины устройства декомпрессии посредством обратного клапана соединен с напорной гидролинией, согласно изобретению в качестве приемной гидромашины использован гидромотор, выходной канал которого гидравлически соединен со сливной гидролинией, в качестве выходной гидромашины применен насос, входной канал которого гидравлически соединен с баком наполнения, а разделительный элемент выполнен в виде соединительной муфты между валами гидромотора и насоса, при этом одна из указанных гидромашин выполнена регулируемой с электрическим пропорциональным управлением и ее электрический узел управления соединен с выходом входящего в состав системы управления пресса контроллера, соответствующие входы которого соединены с выходами датчика давления в рабочей полости рабочего гидроцилиндра, датчика положения регулирующего органа регулируемой гидромашины и датчика угловой скорости вращения валов гидромашин.
Совокупность признаков предлагаемого гидравлического привода, состоящая в том, что в качестве приемной гидромашины использован гидромотор, выходной канал которого гидравлически соединен со сливной гидролинией, в качестве выходной гидромашины применен насос, входной канал которого гидравлически соединен с баком наполнения, а разделительный элемент выполнен в виде соединительной муфты между валами гидромотора и насоса, при этом одна из указанных гидромашин выполнена регулируемой с электрическим пропорциональным управлением и ее электрический узел управления соединен с выходом входящего в состав системы управления пресса контроллера, соответствующие входы которого соединены с выходами датчика давления в рабочей полости рабочего гидроцилиндра, датчика положения регулирующего органа регулируемой гидромашины и датчика угловой скорости вращения валов гидромашин, позволяет обеспечить сохранение для последующего использования потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, при ее минимальных потерях и вне зависимости от значения давления в рабочем гидроцилиндре по окончании рабочего хода подвижной траверсы.
Для осуществления декомпрессии с сохранением энергии при любом текущем значении давления рр.ц в рабочей полости рабочего гидроцилиндра пресса после завершения рабочего хода необходимо, чтобы текущее значение Мгм вращающего момента на валу гидромотора было не меньше значения Мн вращающего момента, который требуется создать на валу насоса в тот же момент времени t с тем, чтобы обеспечить вращение валов обеих указанных гидромашин с определенной угловой скоростью со, то есть должно выполняться условие:

где 

qгм, ηгм - текущие значения соответственно рабочего объема и гидромеханического коэффициента полезного действия (КПД) гидромотора;
qн, ηн - текущие значения соответственно рабочего объема и гидромеханического КПД насоса;
рпит - давление в напорной гидролинии;
рб.н - давление в баке наполнения;
рсл - давление в сливной гидролинии (рсл<рб.н).
Согласно выражениям (1), (2) и (3) в процессе декомпрессии и преобразования энергии должно поддерживаться следующее соотношение между значениями рабочих объемов гидромотора и насоса путем изменения рабочего объема той из этих гидромашин, которая является регулируемой:

Поскольку текущее значение рр.ц давления в рабочем гидроцилиндре пресса контролируется с помощью датчика давления, сигнал с выхода которого поступает на соответствующий вход контроллера, то в контроллере на основании соотношения (4) производится вычисление необходимого в данный момент времени для осуществления декомпрессии предельного значения рабочего объема регулируемой гидромашины (при котором упомянутое соотношение имеет вид равенства) и на основании зависимости рабочего объема этой гидромашины от положения (координаты) z ее регулирующего органа определяется требуемое значение координаты zт.
Для того, чтобы регулирующий орган регулируемой машины занял положение с координатой zт, на ее электрический узел управления необходимо подать электрический сигнал U вида

где Uт - электрический сигнал, необходимый для установки регулирующего органа регулируемой гидромашины в положение с координатой zт в соответствии с экспериментальными данными в некоторой тестовой ситуации;
zф - текущее фактическое значение координаты регулирующего органа регулируемой гидромашины, контролируемое с помощью соответствующего датчика положения, сигнал с выхода которого поступает на соответствующий вход контроллера;
kос.м, kинт.м - коэффициенты усиления;
t - время.
Однако установка регулирующего органа регулируемой гидромашины в положение с координатой zт не гарантирует желаемый ход протекания процесса декомпрессии, поскольку вычисление значения zт производится с использованием соотношения (4) при некоторых среднестатистических значениях КПД ηгм, ηн, которые в процессе работы гидромашин изменяются в достаточно широких пределах.
В связи с этим управляющий электрический сигнал Uупр, подаваемый с выхода контроллера на электрический узел управления регулируемой гидромашины, в процессе декомпрессии формируется с учетом заданного ωз и фактического ωф текущих значений угловой скорости ω вращения валов гидромотора и насоса (с использованием отрицательной обратной связи по угловой скорости):

где kос, kинт - коэффициенты усиления.
При этом величина ωз задается с помощью контроллера, а величина ωф контролируется с помощью датчика угловой скорости, сигнал с выхода которого поступает на соответствующий вход контроллера.
В результате процесс декомпрессии с сохранением энергии происходит вне зависимости от значения давления в рабочем гидроцилиндре по окончании рабочего хода подвижной траверсы. Более того, благодаря использованию отрицательной обратной связи по угловой скорости вращения валов гидромотора и насоса этот процесс протекает при заданной угловой скорости вращения валов гидромашин, что позволяет регулировать интенсивность и продолжительность декомпрессии. Потери энергии в данном случае являются минимальными и определяются, главным образом, лишь совершенством используемых стандартных гидромашин (гидромотора и насоса).
Сущность изобретения поясняется чертежом, на котором изображена принципиальная гидравлическая схема гидравлического привода подвижной траверсы пресса.
Гидравлический привод подвижной траверсы пресса содержит рабочий гидроцилиндр 1, возвратные гидроцилиндры 2, 3, гидрораспределители 4, 5 управления соответственно рабочим 1 и возвратными 2, 3 гидроцилиндрами, бак наполнения 6, напорную гидролинию 7, соединенную с насосно-аккумуляторной станцией 8, сливную гидролинию 9, соединенную с баком 10, находящимся под атмосферным давлением, и устройство декомпрессии 11.
Плунжеры гидроцилиндров 1, 2, 3 соединены с подвижной траверсой 12 пресса.
В состав гидрораспределителя 4 входят напорный 13 и наполнительно-сливной 14 клапаны. Рабочая полость гидроцилиндра 1 соединена посредством напорного клапана 13 с напорной гидролинией 7 пресса, а посредством наполнительно-сливного клапана 14 с наполнительно-сливной гидролинией 15 пресса, которая в свою очередь соединена с баком наполнения 6.
В состав гидрораспределителя 5 входят напорный 16 и сливной 17 клапаны. Рабочие полости возвратных гидроцилиндров 2, 3 соединены между собой и посредством напорного клапана 16 с напорной гидролинией 7 пресса, а посредством сливного клапана 17 с наполнительно-сливной гидролинией 15.
Все вышеперечисленные клапаны имеют индивидуальное электрогидравлическое управление. На чертеже все клапаны показаны в состоянии, когда их проходное сечение закрыто.
Устройство декомпрессии 11 состоит из объемных гидромотора 18 и насоса 19, валы которых соедиены между собой посредством муфты 20.
На чертеже в качестве примера показан случай, когда гидромотор 18 выполнен нерегулируемым, а насос 19 - регулируемым с пропорциональным электрическим управлением. Возможен вариант исполнения устройства декомпрессии, когда насос является нерегулируемым, а гидромотор - регулируемым с пропорциональным электрическим управлением.
Входной канал гидромотора 18 гидравлически соединен посредством управляемого клапана 21 с рабочей полостью рабочего гидроцилиндра 1, а его выходной канал соединен со сливной гидролинией 9.
Входной канал насоса 19 соединен с наполнительно-сливной гидролинией 15 пресса, которая в свою очередь соединена с баком наполнения 6, а выходной канал насоса посредством обратного клапана 22 соединен с напорной гидролинией 7.
Электрический узел управления насоса 19 соединен с выходом входящего в состав системы управления пресса контроллера 23, входы которого соединены с выходами датчика давления 24 в рабочей полости рабочего гидроцилиндра 1, датчика положения 25 регулирующего органа насоса 19 (наклонного блока или наклонного диска в случае использования аксиально-поршневого насоса; подвижного статора в случае использования радиально-поршневого или пластинчатого насоса) и датчика 26 угловой скорости вращения валов гидромашин.
Гидравлический привод подвижной траверсы пресса работает следующим образом.
В исходном остановленном положении подвижной траверсы 12 пресса проходное сечение наполнительно-сливного клапана 14 открыто, а проходные сечения напорных клапанов 13, 16 и сливного клапана 17 гидрораспределителей 4, 5 закрыты. При этом давление в рабочей полости рабочего гидроцилиндра 1 определяется давлением жидкости в баке наполнения 6.
Клапан 21 в основном предназначен для отключения устройства декомпрессии 11 от рабочего гидроцилиндра 1 при проведении ремонтных работ и в процессе работы пресса может использоваться двояко, а именно: 1) его проходное сечение может быть постоянно открыто; 2) проходное сечение клапана открывается только для осуществления декомпрессии, а все остальное время является закрытым.
Если проходное сечение клапана 21 постоянно открыто, то во все периоды времени, кроме того, когда производится декомпрессия, регулирующий орган насоса 19 по сигналу, поступающему от контроллера 23, устанавливается в положение, при котором рабочий объем насоса является максимальным. В данном случае максимальный рабочий объем насоса должен исключать выполнение соотношения (4) при рр.ц=рпит для того, чтобы не происходило вращение валов гидромотора 18 и насоса 19 во время рабочего хода подвижной траверсы.
Если проходное сечение клапана 21 после окончания декомпрессии закрывается, то вплоть до начала очередного рабочего хода подвижной траверсы 12 положение регулирующего органа насоса 19 не изменяется, то есть остается таким же, как в момент окончания декомпрессии.
Для перемещения подвижной траверсы 12 в направлении заготовки, подлежащей деформации (на чертеже заготовка не показана), производится открытие проходного сечения сливного клапана 17 возвратных гидроцилиндров 2, 3. До начала деформации заготовки движение траверсы 12 (холостой ход) происходит под действием силы давления, действующей на траверсу со стороны рабочего гидроцилиндра 1, в случае горизонтальных прессов и дополнительно силы тяжести подвижной траверсы 12 и движущихся вместе с ней частей в случае вертикальных прессов. При этом рабочая жидкость в рабочую полость рабочего гидроцилиндра 1 поступает через клапан 14 по наполнительно-сливной гидролинии 15 из бака наполнения 6, а из рабочих полостей возвратных гидроцилиндров 2, 3 вытесняется через сливной клапан 17 в наполнительно-сливную гидролинию 15.
Для остановки подвижной траверсы 12 при выполнении ею холостого хода достаточно закрыть проходное сечение сливного клапана 17 гидрораспределителя 5 возвратных гидроцилиндров 2, 3.
После вступления инструмента, закрепленного на подвижной траверсе 12 пресса (на чертеже инструмент не показан), в контакт с заготовкой и начала деформации последней осуществляется переход к рабочему ходу пресса.
Для осуществления рабочего хода производится закрытие проходного сечения наполнительно-сливного клапана 14 рабочего гидроцилиндра 1 и затем открытие проходного сечения его напорного клапана 13 на величину, необходимую для осуществления деформации заготовки с заданной скоростью движения траверсы 12. Во время рабочего хода в рабочую полость рабочего гидроцилиндра 1 жидкость поступает через клапан 13 из напорной гидролинии 7.
Если проходное сечение клапана 21 закрыто, то в процессе рабочего хода по мере увеличения давления в рабочей полости рабочего гидроцилиндра 1 производится изменение положения регулирующего органа насоса 19 благодаря подаче на его электрический узел управления от контроллера 23 управляющего электрического сигнала, изменяющегося в соответствии с зависимостью (5). В результате к моменту окончания рабочего хода регулирующий орган насоса 19 занимает положение, близкое к оптимальному для начала декомпрессии.
По окончании рабочего хода жидкость в рабочей полости рабочего гидроцилиндра 1 обладает большой потенциальной энергией за счет упругой деформации собственно жидкости и металлических частей пресса.
После окончания рабочего хода проходное сечение напорного клапана 13 закрывается, а также закрывается проходное сечение сливного клапана 17. Если проходное сечение клапана 21 было закрыто, то оно открывается. На электрический узел управления регулируемого насоса 19 с выхода контроллера 23 на основании сигналов с датчиков 24, 25, 26 подается управляющий электрический сигнал, изменяющийся в соответствии с зависимостью (6).
При этом жидкость из полости рабочего гидроцилиндра 1, вследствие своего расширения и уменьшения напряжений в металлических частях пресса, поступает во входной канал гидромотора 18 и создает на его валу вращающий момент, под действием которого вал гидромотора вместе с соединенным с ним посредством муфты 20 валом насоса 19 приходит во вращение с заданной угловой скоростью, которое сопровождается подачей насосом 19 рабочей жидкости из бака наполнения 6 через обратный клала 22 в напорную гидролинию 7 пресса (и далее в аккумулятор насосно-аккумуляторной станции 8).
По мере перетекания жидкости из рабочего гидроцилиндра 1 через гидромотор 18 в бак 10 давление жидкости в рабочем гидроцилиндре 1 снижается, что сопровождается уменьшением рабочего объема насоса 19 (и соответственно момента сопротивления на его валу), благодаря чему, несмотря на понижение давления в рабочем гидроцилиндре 1, процесс декомпрессии продолжается при обеспечении заданной скорости вращения валов гидромотора 18 и насоса 19.
Энергия жидкости высокого давления, поданной насосом 19 устройства декомпрессии 11 в напорную гидролинию 7 пресса, используется далее для совершения полезной работы при выполнении последующих технологических операций изменения положения подвижной траверсы 12 пресса.
После снижения давления в рабочем гидроцилиндре 1 до установленного минимального значения (это давление близко к давлению в баке наполнения 6) на основании сигнала датчика давления 24 открывается проходное сечение наполнительно-сливного клапана 14. В результате рабочая полость рабочего гидроцилиндра 1 соединяется с баком наполнения 6.
Если алгоритмом управления предусматривается закрытие проходного сечения клапана 21, то оно закрывается. Если проходное сечение клапана 21 постоянно открыто, то, как отмечалось выше, регулирующий орган насоса 19 по сигналу, поступающему от контроллера 23, устанавливается в положение, при котором рабочий объем насоса является максимальным.
Для осуществления обратного хода подвижной траверсы пресса производится открытие проходного сечения напорного клапана 16 возвратных гидроцилиндров 2, 3. Во время обратного хода жидкость в рабочие полости возвратных гидроцилиндров 2, 3 поступает через открытое проходное сечение клапана 16 из напорной гидролинии 7. При этом из рабочей полости рабочего гидроцилиндра 1 жидкость вытесняется в бак наполнения 6 через открытое проходное сечение наполнительно-сливного клапана 14 и наполнительно-сливную гидролинию 15.
Для остановки подвижной траверсы 12 при выполнении ею обратного хода достаточно закрыть проходное сечение напорного клапана 16 возвратных гидроцилиндров.
Как следует из вышеприведенного описания устройства и работы, предлагаемый гидравлический привод подвижной траверсы пресса обеспечивает сохранение для последующего использования потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода, при ее минимальных потерях и вне зависимости от значения давления в рабочем гидроцилиндре по окончании рабочего хода подвижной траверсы, что повышает энергетическую эффективность (коэффициент полезного действия) гидропривода пресса в целом.
Кроме того, конструкция предлагаемого гидропривода позволяет регулировать интенсивность и продолжительность процесса преобразования вышеуказанной потенциальной энергии.
Литературные источники
1. Гидравлический привод пресса: Патент на изобретение RU №2078640, МПК В21J 9/12, В30В 15/16. Заявлено 08.08.1995. Опубликовано 10.05.1997.
2. Гидропресс с возвратом упругой энергии в систему питания: Патент на полезную модель UA №10297, МПК В30В 15/16, В30В 1/00. Заявлено 11.04.2005. Опубликовано 15.11.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2528282C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2598410C1 |
| ГИДРОПРИВОД ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2530917C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНОЙ ТРАВЕРСОЙ ГИДРАВЛИЧЕСКОГО ПРЕССА | 2021 |
|
RU2764536C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2011 |
|
RU2468919C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2602934C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ВЕРТИКАЛЬНОГО ПРЕССА | 2018 |
|
RU2687122C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 1995 |
|
RU2078640C1 |
| ГИДРОПРИВОД ПЕРЕДНЕЙ ГОЛОВКИ ПРАВИЛЬНО-РАСТЯЖНОЙ МАШИНЫ | 2013 |
|
RU2536734C1 |
| ПУЛЬСАТОРНЫЙ ГИДРОПРИВОД РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241565C1 |
Изобретение относится к прессовому оборудованию и может быть использовано в управляющих устройствах ковочных и штамповочных прессов. Гидравлический привод подвижной траверсы пресса содержит рабочий и возвратные гидроцилиндры, гидрораспределители, бак наполнения, напорную гидролинию, соединенную с насосно-аккумуляторной станцией, сливную гидролинию, соединенную с баком, и устройство декомпрессии жидкости в рабочем гидроцилиндре. Устройство декомпрессии состоит из гидромотора и регулируемого насоса с пропорциональным электрическим управлением, валы которых соединены посредством муфты. Входной канал гидромотора через управляемый клапан соединен с рабочей полостью рабочего гидроцилиндра. Выходной канал соединен с баком. Входной канал насоса соединен с баком наполнения. Его выходной канал через обратный клапан соединен с напорной гидролинией. Электрический узел управления насоса соединен с выходом входящего в состав системы управления пресса контроллера. Входы контроллера соединены с выходами датчика давления в рабочей полости рабочего гидроцилиндра, датчика положения регулирующего органа насоса и датчика угловой скорости вращения валов гидромашин. В результате обеспечивается повышение коэффициента полезного действия гидравлического привода за счет сохранения для последующего использования потенциальной энергии, накопленной вследствие упругих деформаций жидкости и металлоконструкций пресса во время рабочего хода. 1 ил.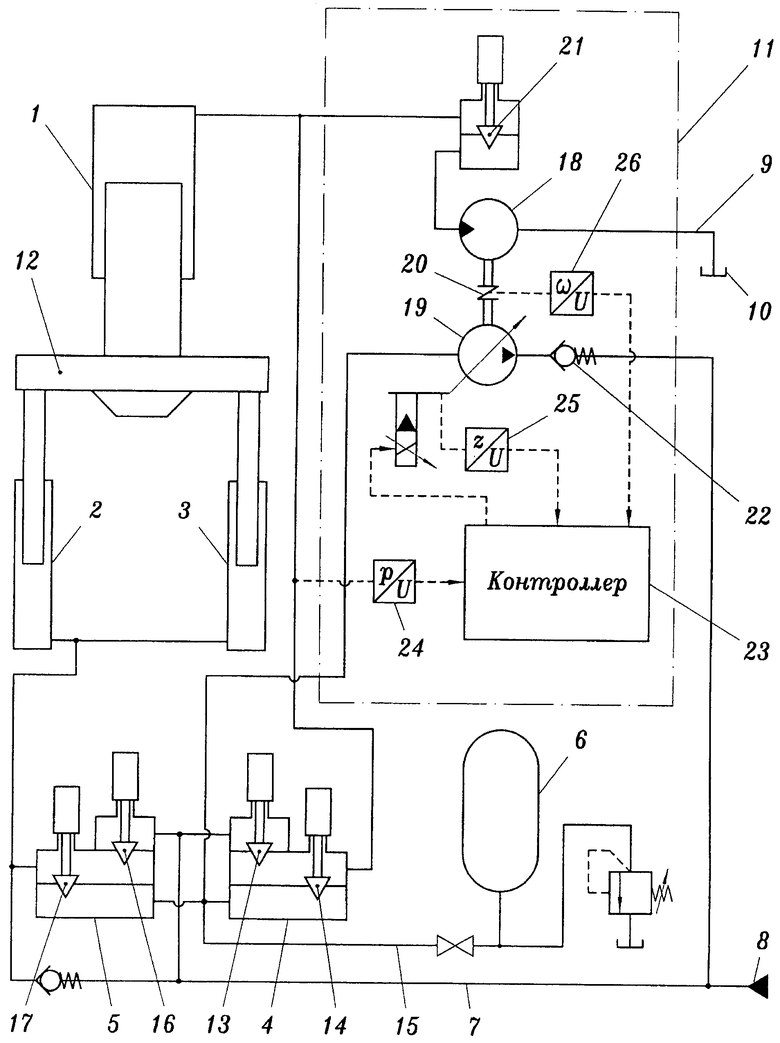
Гидравлический привод подвижной траверсы пресса, выполненного с системой управления, содержащий рабочий и возвратные гидроцилиндры, гидрораспределители управления этими гидроцилиндрами, бак наполнения, напорную гидролинию, соединенную с насосно-аккумуляторной станцией, сливную гидролинию, соединенную с баком, находящимся под атмосферным давлением, и устройство декомпрессии рабочей жидкости в рабочем гидроцилиндре, состоящее из приемной и выходной объемных гидромашин с установленным между их подвижными звеньями разделительным элементом, при этом входной канал приемной объемной гидромашины гидравлически соединен с рабочей полостью рабочего гидроцилиндра, а выходной канал выходной объемной гидромашины посредством обратного клапана соединен с напорной гидролинией, отличающийся тем, что в качестве приемной гидромашины использован гидромотор, выходной канал которого гидравлически соединен со сливной гидролинией, в качестве выходной гидромашины использован насос, входной канал которого гидравлически соединен с баком наполнения, а разделительный элемент выполнен в виде муфты, соединяющей валы гидромотора и насоса, при этом одна из указанных гидромашин выполнена регулируемой с электрическим пропорциональным управлением и имеет электрический узел управления, который соединен с выходом входящего в состав системы управления пресса контроллера, соответствующие входы которого соединены с выходами датчика давления в рабочей полости рабочего гидроцилиндра, датчика положения регулирующего органа регулируемой гидромашины и датчика угловой скорости вращения валов гидромашин.
| Лупа для отсчета по шкале | 1928 |
|
SU10297A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2011 |
|
RU2468919C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 1995 |
|
RU2078640C1 |
| Способ приготовления пластин для тонкослойной хроматографии сахаров и компонентов нуклеиновых кислот | 1985 |
|
SU1318906A1 |

