Изобретение относится к области кузнечно-прессового оборудования, а именно к способам управления подвижной траверсой гидравлических прессов, и может быть использовано при модернизации существующих и создании новых систем управления указанными агрегатами.
Известен способ управления подвижной траверсой гидравлического пресса, в соответствии с которым после завершения рабочего хода траверсы прекращают подачу рабочей жидкости в рабочие полости рабочих гидроцилиндров траверсы, рабочие полости возвратных гидроцилиндров траверсы разобщают с гидробаком, рабочие полости рабочих гидроцилиндров траверсы разгружают от высокого давления путем соединения их с гидробаком и осуществляют обратный ход траверсы [1].
При использовании данного способа управления подвижной траверсой потенциальная энергия, накопленная во время рабочего хода траверсы вследствие упругих деформаций рабочей жидкости и металлоконструкций (в частности, колонн) пресса, в процессе разгрузки рабочих гидроцилиндров траверсы от высокого давления после соединения их с гидробаком преобразуется в тепловую энергию (и в конечном итоге теряется, рассеиваясь в окружающую среду), что является недостатком способа.
Наиболее близким к заявляемому техническому решению является приняты в качестве прототипа способ управления подвижной траверсой гидравлического пресса, в соответствия с которым после завершения рабочего хода траверсы прекращают подачу рабочей жидкости в рабочие полости рабочих гидроцилиндров траверсы, рабочие полости возвратных гидроцилиндров траверсы разобщают с гидробаком, рабочие полости рабочих гидроцилиндров траверсы в два этапа разгружают от высокого давления путем соединения их на первом этапе с устройством приема рабочей жидкости, а на втором этапе путем соединения с гидробаком после отсоединения от устройства приема рабочей жидкости, и осуществляют обратный ход траверсы [2]. Согласно указанному способу в качестве устройства приема рабочей жидкости используют пневмогидравлический аккумулятор. В процессе разгрузки рабочих гидроцилиндров от давления происходит аккумулирование некоторой часта потенциальной энергия, накопленной во время рабочего хода траверсу вследствие упругих деформаций рабочей жидкости и металлоконструкций (в частности» колонн) пресса» посредством газа (в результате его сжатия) в пневмогидравлическом аккумуляторе. Энергия сжатого газа, заключенного в пневмогидравлическом аккумуляторе, используется далее для совершения полезной работы при выполнении последующих технологических операций по изменению положения подвижной траверсы пресса.
Преобразование потенциальной энергии, накопленной во время рабочего хода траверсы вследствие упругих деформаций жидкости и металлоконструкций пресса, сначала в энергию сжатого газа, а затем преобразование энергии сжатого газа в механическую энергию жидкости сопровождается при каждом преобразовании дополнительными потерями накопленной энергии, что снижает потенциально возможную долю ее использования при выполнении последующих технологических операций по изменению положения подвижной траверсы пресса.
Кроме того, указанные этапы преобразования энергии осуществляются в течение разных отрезков времени, вследствие чего продолжительность рабочего цикла перемещения подвижной траверсы пресса оказывается больше своего потенциально возможного минимального при прочих равных условиях значения, что снижает быстроходность пресса (число ходов подвижной траверсы в единицу времени) и является недостатком известного способа управления.
Технической задачей, решаемой изобретением, является создание способа управления подвижной траверсой гидравлического пресса, обеспечивающего повышение быстроходности пресса (числа ходов подвижной траверсы пресса в единицу времени) за счет совмещения во времени первого этапа разгрузки рабочих полостей рабочих гидроцилиндров траверсы от высокого давления после окончания рабочего хода траверсы и этапа использования части потенциальной энергии, накопленной во время рабочего хода траверсы вследствие упругих деформаций жидкости и металлоконструкций пресса, для выполнения обратного хода траверсы.
Для решения поставленной задачи в известном способе управления подвижной траверсой гидравлического пресса, в соответствии с которым после завершения рабочего хода траверсы прекращают подачу рабочей жидкости в рабочие полости рабочих гидроцилиндров траверсы, рабочие полости возвратных гидроцилиндров траверсы разобщают с гидробаком, рабочие полости рабочих гидроцилиндров траверсы в два этапа разгружают от высокого давления путем соединения их на первом этапе с устройством приема рабочей жидкости, а на втором этапе путем соединения с гидробаком после отсоединения от устройства приема рабочей жидкости, и осуществляют обратный ход траверсы, согласно изобретению на первом этапе разгрузки рабочих полостей рабочих гидроцилиндров подвижной траверсы от высокого давления в качестве устройства приема рабочей жидкости используют рабочие полости возвратных гидроцилиндров, при этом рабочие полости рабочих и возвратных гидроцилиндров разобщают после выравнивания с заданной погрешностью значений давления в указанных полостях.
Использование рабочих полостей возвратных гидроцилиндров на первом этапе разгрузки рабочих полостей рабочих гидроцилиндров подвижной траверсы от высокого давления в качестве устройства приема рабочей жидкости и разобщение рабочих полостей рабочих и возвратных гидроцилиндров после выравнивания с заданной погрешностью значений давления в указанных полостях обеспечивает при прочих равных условиях снижение продолжительности рабочего цикла перемещения подвижной траверсы пресса и, соответственно, повышение быстроходности пресса (числа ходов подвижной траверсы в единицу времени), благодаря совмещению во времени первого этапа разгрузки рабочих полостей рабочих гидроцилиндров траверсы от высокого давления после окончания рабочего хода траверсы и этапа использования части потенциальной энергии, накопленной во время рабочего хода траверсы вследствие упругих деформаций жидкости и металлоконструкций пресса, для выполнения обратного хода траверсы.
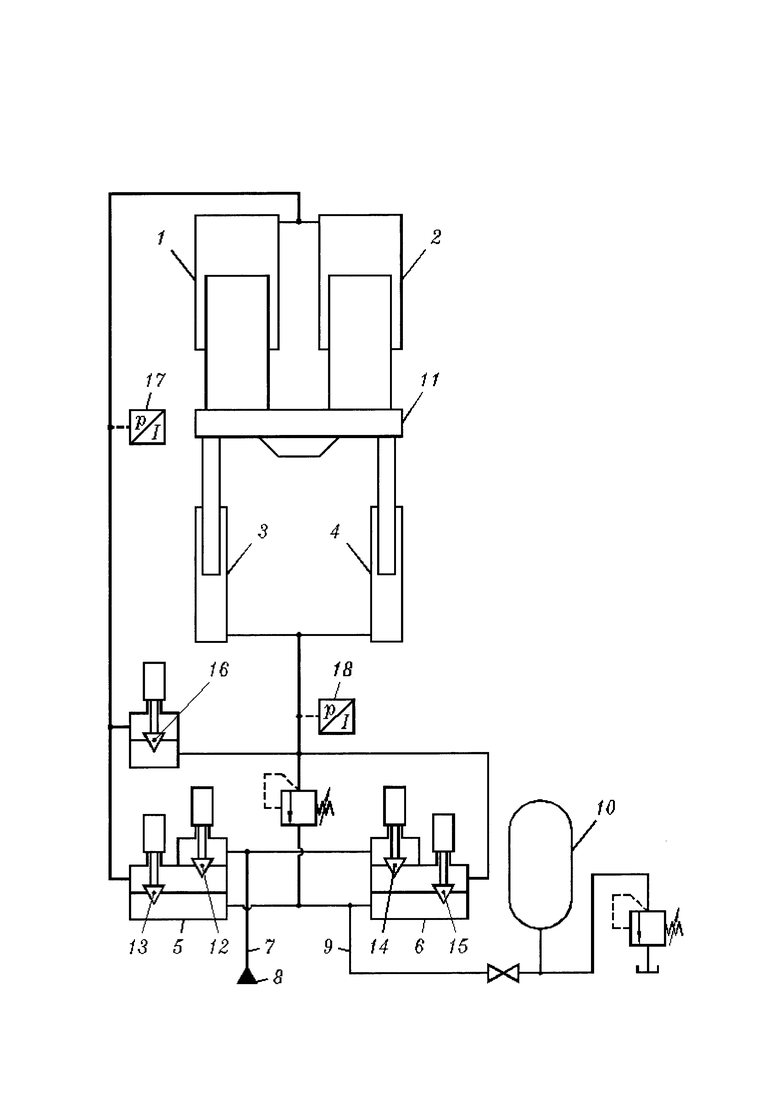
Сущность изобретения поясняется чертежом, на котором приведен один из возможных вариантов исполнения принципиальной схемы электрогидравлического привода подвижной траверсы гидравлического пресса для осуществления предлагаемого способа управления.
Электрогидравлический привод подвижной траверсы гидравлического пресса включает в свой состав плунжерные рабочие гидроцилиндры 1, 2, плунжерные возвратные гидроцилиндры 3, 4, гидрораспределители 5, 6 управления соответственно рабочими 1, 2 и возвратными 3, 4 гидроцилиндрами, напорную гидролинию 7, соединенную с напорным каналом источника подачи рабочей жидкости 8 и наполнительно-сливную сливную гидролинию 9, соединенную с гидробаком наполнения 10.
Плунжеры гидроцилиндров 1, 2, 3, 4 соединены с подвижной траверсой 11 пресса.
Электрогидравлический привод подвижной траверсы по виду источника подачи рабочей жидкости 8 может быть насосным или насосно-аккумуляторным.
В случае насосного привода источник подачи рабочей жидкости 8 представляет собой насосную установку, в состав которой входят несколько объемных насосов (как регулируемых, так и нерегулируемых), каждый из которых укомплектован индивидуальным предохранительным клапаном с электрическим управлением (с возможностью перевода насоса с режима разгрузки от давления на режим работы под нагрузкой и обратно) и подключен своим напорным каналом через индивидуальный обратный клапан к напорному каналу источника подачи 8 (на чертеже структура источника подачи рабочей жидкости 8 не показана). При этом суммарная номинальная подача насосов, входящих в состав насосной установки, соответствует расходу рабочей жидкости, необходимому для осуществления перемещения подвижной траверсы 11 с максимальной скоростью, установленной для рабочего хода.
В случае насосно-аккумуляторного привода источник подачи рабочей жидкости 8 представляет собой совокупность насосной установки, в состав которой входят несколько объемных насосов (как правило, нерегулируемых), каждый из которых укомплектован индивидуальным предохранительным клапаном с электрическим управлением (с возможностью перевода насоса с режима разгрузки от давления на режим работы под нагрузкой и обратно) и подключен своим напорным каналом через индивидуальный обратный клапан к напорному каналу насосной установки, и пневмогидравлического аккумулятора, жидкостная полость которого подключена к напорному каналу насосной установки посредством автоматически управляемого двухлинейного двухпозиционного клапана типа одностороннего гидрозамка, через который при отсутствии управляющего сигнала движение рабочей жидкости возможно только в направлении аккумулятора. При этом суммарная номинальная подача насосов, входящих в состав насосной установки, соответствует среднему расходу рабочей жидкости за рабочий цикл перемещения подвижной траверсы пресса, подсчитанному на основания суммы объемов жидкости, необходимых для подачи в рабочие гидроцилиндры во время рабочего хода траверсы и в возвратные гидроцилиндры во время обратного хода траверсы (при максимальных значениях рабочего и обратного ходов траверсы в процессе рабочего цикла). Напорный канал насосной установки соединен с напорным каналом источника подачи рабочей жидкости 8 посредством двухлинейного двухпозиционного запорного клапана с электрогидравлическим управлением и нормально закрытым проходным сечением (на чертеже структура насосного источника подачи рабочей жидкости 8 не показана).
В состав гидрораспределителя 5 входят напорный 12 и наполнительно-сливной 13 клапаны. Рабочие полости гидроцилиндров 1, 2 соединены между собой и посредством напорного клапана 12 с напорной гидролинией 7, а посредством наполнительно-сливного клапана 13 - с наполнительно-сливной гидролинией 9.
В состав гидрораспределителя 6 входят напорный 14 и сливной 15 клапаны. Рабочие полости возвратных гидроцилиндров 3, 4 соединены между собой и посредством напорного клапана 14 с напорной гидролинией 7, а посредством сливного клапана 15 - с наполнительно-сливной гидролинией 9.
Рабочие полости возвратных гидроцилиндров 3, 4 посредством дополнительного двухлинейного двухпозиционного клапана 16 с нормально закрытым проходным сечением соединены с рабочими полостями рабочих гидроцилиндров 1,2.
Вышеперечисленные клапаны: 12, 16 - имеют индивидуальное электрогидравлическое управление. На чертеже эти клапаны показаны в состоянии, когда их проходное сечение закрыто.
Для дистанционного контроля величины давления в рабочих полостях рабочих гидроцилиндров 1, 2 к ним присоединен датчик давления 17.
Для дистанционного контроля величины давления в рабочих полостях возвратных гидроцилиндров 3, 4 к ним присоединен датчик давления 18.
Управление прессом осуществляется посредством электронной системы управления (на чертеже система управления пресса не показана), с которой соединены все электроуправляемые гидроаппараты и датчики, входящие в состав рассматриваемого электрогидравлического привода.
Предлагаемый способ управления подвижной траверсой гидравлического пресса реализуется следующим образом.
В исходном состоянии гидропривода проходные сечения клапанов 12, 14, 15 и клапана 16, если он имеется в составе гидропривода, закрыты, а проходное сечение наполнительно-сливного клапана 13 открыто. При этом рабочие полости возвратных гидроцилиндров 3, 4 заперты, рабочие полости рабочих гидроцилиндров 1, 2 отделены от напорной гидролинии 7 пресса, и подвижная траверса 11 находится в фиксированном положении, а давление в рабочих полостях рабочих гидроцилиндров 1, 2 определяется давлением в гидробаке наполнения 10 и взаимным расположением гидробака 10 и гидроцилиндров 1, 2.
Рабочий цикл перемещения подвижной траверсы 11 начинается с осуществления хода приближения, то есть холостого хода траверсы в направлении заготовки, подлежащей деформации (на чертеже заготовка не показана). Для осуществления хода приближения подвижной траверсы 11 открывают проходное сечение сливного клапана 15 возвратных гидроцилиндров 3, 4.
Для осуществления рабочего хода после вступления инструмента (на чертеже инструмент не показан), закрепленного на подвижной траверсе 11, в контакт с заготовкой закрывают проходное сечение наполнительно-сливного клапана 13 и открывают проходное сечение напорного клапана 12 рабочих гидроцилиндров 1, 2. При этом в случае насосного гидропривода все или часть насосов, входящих в состав источника подачи рабочей жидкости 8, в зависимости от необходимой скорости движения траверсы 11 в период выполнения рабочего хода переводят с режима разгрузки от давления на режим работы под нагрузкой. Следует отметить, что в случае насосного гидропривода все насосы, входящие в состав источника подачи рабочей жидкости 8, при остановленной траверсе 11, а также в период выполнения хода приближения и разгрузки рабочих гидроцилиндров 1, 2 от давления работают в режиме разгрузки от давления. В случае насосно-аккумуляторного гидропривода перевод насосов с режима разгрузки от давления на режим работы под нагрузкой и обратно производится автоматически в зависимости от давления и/или уровня рабочей жидкости в жидкостной полости пневмогидравлического аккумулятора, входящего в состав источника подачи рабочей жидкости 8.
После завершения рабочего хода траверсы 11 закрывают проходное сечение напорного клапана 12 рабочих гидроцилиндров 1, 2, прекращая тем самым подачу рабочей жидкости в рабочие полости указанных гидроцилиндров, и закрывают проходное сечение сливного клапана 15 возвратных гидроцилиндров 3, 4, разобщая тем самым рабочие полости последних с гидробаком 10, после чего рабочие полости рабочих гидроцилиндров 1, 2 траверсы в два этапа разгружают от высокого давления путем соединения их на первом этапе с рабочими полостями возвратных гидроцилиндров 3, 4, для чего открывают проходное сечение клапана 16. В результате этого происходит перетекание рабочей жидкости из рабочих полостей рабочих гидроцилиндров 1, 2 в рабочие полости возвратных гидроцилиндров 3, 4 с одновременным понижением давления в рабочих гидроцилиндрах 1, 2 и повышением давления в возвратных гидроцилиндрах 3, 4. Таким образом, на первом этапе разгрузки рабочих гидроцилиндров 1, 2 от давления сразу происходит преобразование некоторой части потенциальной энергии, накопленной во время рабочего хода траверсы вследствие упругих деформаций рабочей жидкости и металлоконструкций (в частности, колонн) пресса, в энергию жидкости, используемую в дальнейшем для обратного хода траверсы.
После выравнивания с заданной погрешностью значений давления в рабочих полостях рабочих 1, 2 и возвратных 3, 4 гидроцилиндров (контроль этих значений давления осуществляют на основании сигналов датчиков давления соответственно 17 и 18) указанные полости разобщают путем закрытия проходного сечения клапана 16 и для осуществления второго этапа разгрузки рабочих полостях рабочих гидроцилиндров 1, 2 от высокого давления последние соединяют с гидробаком 10 путем открытия проходного сечения наполнительно-сливного клапана 13.
При снижении давления в рабочих полостях рабочих гидроцилиндров 1, 2 до определенного уровня в связи с тем, что давление в рабочих полостях возвратных гидроцилиндров 3, 4 является повышенным (в результате использования их в качестве приемника рабочей жидкости на первом этапе разгрузки рабочих полостей рабочих гидроцилиндров 1, 2 от высокого давления) автоматически начинается обратный ход подвижной траверсы 11. Одновременно с этим открывают проходное сечение напорного клапана 14 возвратных гидроцилиндров 3, 4.
Для прекращения обратного хода подвижной траверсы и ее остановки закрывают проходное сечение напорного клапана 14 возвратных гидроцилиндров 3, 4.
Следует отметить, что предлагаемый способ управления подвижной траверсой гидравлического пресса может быть реализован без использования в составе гидропривода пресса дополнительного клапана 16. В этом случае для соединения рабочих полостей рабочих 1, 2 и возвратных 3, 4 гидроцилиндров после окончания рабочего хода закрывают проходное сечение сливного клапана 15 возвратных гидроцилиндров 3, 4 и, не закрывая проходное сечение напорного клапана 12 рабочих гидроцилиндров 1, 2, открывают проходное сечение напорного клапана 14 возвратных гидроцилиндров 1, 2. В случае использования насосного гидропривода насосы, входящие в состав источника подачи рабочей жидкости 8, при этом, как уже отмечено выше, переводятся с режима работы под нагрузкой на режим разгрузки от давления и их напорные каналы отделяются от напорной гидролинии 7 пресса обратными клапанами, входящими в состав источника подачи рабочей жидкости 8. В случае же использования насосно-аккумуляторного гидропривода подачу рабочей жидкости в напорную гидролинию 7 пресса от источника подачи рабочей жидкости 8 на этот период прекращают путем закрытия проходного сечения двухлинейного двухпозиционного запорного клапана с электрогидравлическим управлением, установленного в напорном канале источника подачи рабочей жидкости 8 (все остальное время при работе пресса проходное сечение этого клапана открыто).
Для завершения первого этапа разгрузки рабочих полостей рабочих гидроцилиндров траверсы от высокого давления в рассматриваемом случае закрывают проходные сечения напорных клапанов 12 и 14.
В соответствии с вышеизложенным при реализации предлагаемого
способа управления подвижной траверсой гидравлического пресса продолжительность рабочего цикла перемещения траверсы сокращается на время, необходимое для набора давления в рабочих полостях возвратных гидроцилиндров и присоединенных к ним трубопроводам перед выполнением обратного хода траверсы, благодаря чему повышается быстроходность пресса (число ходов подвижной траверсы в единицу времени). Указанный набор давления в рабочих полостях возвратных гидроцилиндров происходит одновременно с первым этапом разгрузки рабочих полостей рабочих гидроцилиндров подвижной траверсы пресса от высокого давления после окончания рабочего хода за счет части потенциальной энергии, накопленной во время рабочего хода траверсы вследствие упругих деформаций жидкости и металлоконструкций пресса.
Литературные источники
1. Корчак Е.С. Динамические особенности возвратного хода и процесса разгрузки рабочих цилиндров от давления ковочных гидравлических прессов // Вестник машиностроения. 2008. №10. С. 67-70 (с. 68, рис. 2).
2. Гойдо М.Е., Бодров В.В., Багаутдинов P.M., Алексеев М.А. Снижение колебаний давления в наполнительно-сливном трубопроводе гидросистемы ковочного пресса // Кузнечно-штамповочное производство. Обработка материалов давлением. 2005. №4. С. 30-36 (с. 31, рис. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2602934C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2598410C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2011 |
|
RU2468919C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ВЕРТИКАЛЬНОГО ПРЕССА | 2018 |
|
RU2687122C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2515779C1 |
| ГИДРОПРИВОД ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2530917C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2528282C1 |
| ГИДРОПРИВОД ПЕРЕДНЕЙ ГОЛОВКИ ПРАВИЛЬНО-РАСТЯЖНОЙ МАШИНЫ | 2013 |
|
RU2536734C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 2003 |
|
RU2250828C1 |
Изобретение относится к кузнечно-прессовому оборудованию и может быть использовано в системах управления гидравлическими прессами. После завершения рабочего хода траверсы 11 гидравлического пресса прекращают подачу рабочей жидкости в рабочие полости рабочих гидроцилиндров 1, 2 траверсы. Рабочие полости возвратных гидроцилиндров 3, 4 разобщают с гидробаком 10. Затем рабочие полости рабочих гидроцилиндров в два этапа разгружают от высокого давления путем соединения их на первом этапе с рабочими полостями возвратных гидроцилиндров 3, 4 до выравнивания с заданной погрешностью значений давления в указанных полостях. На втором этапе рабочие полости рабочих гидроцилиндров после отсоединения от рабочих полостей возвратных гидроцилиндров 3, 4 соединяют с гидробаком 10. Осуществляют обратный ход траверсы. В результате обеспечивается повышение числа ходов траверсы пресса в единицу времени за счет совмещения во времени первого этапа разгрузки рабочих полостей рабочих гидроцилиндров после окончания рабочего хода и этапа использования части потенциальной энергии, накопленной во время рабочего хода траверсы. 1 ил.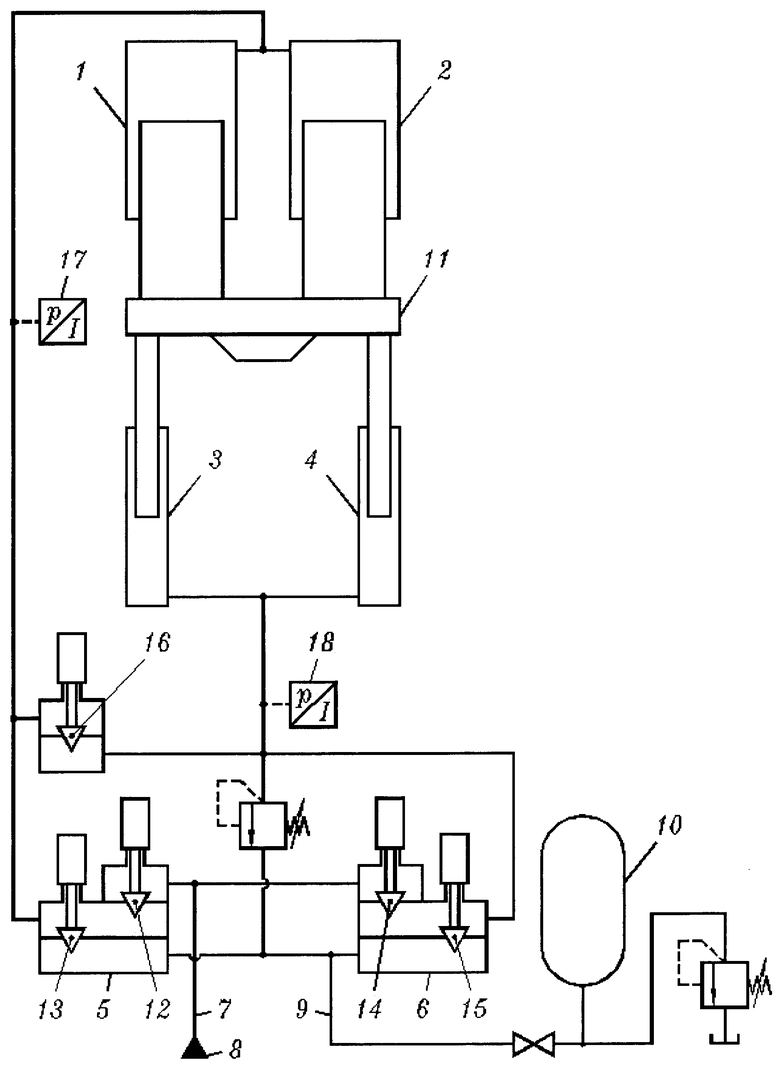
Способ управления подвижной траверсой гидравлического пресса, в соответствии с которым после завершения рабочего хода траверсы прекращают подачу рабочей жидкости в рабочие полости рабочих гидроцилиндров траверсы, рабочие полости возвратных гидроцилиндров траверсы разобщают с гидробаком, рабочие полости рабочих гидроцилиндров траверсы в два этапа разгружают от высокого давления путем соединения их на первом этапе с устройством приема рабочей жидкости, а на втором этапе путем соединения с гидробаком после отсоединения от устройства приема рабочей жидкости, и осуществляют обратный ход траверсы, отличающийся тем, что на первом этапе разгрузки рабочих полостей рабочих гидроцилиндров подвижной траверсы от высокого давления в качестве устройства приема рабочей жидкости используют рабочие полости возвратных гидроцилиндров, при этом рабочие полости рабочих и возвратных гидроцилиндров разобщают после выравнивания с заданной погрешностью значений давления в указанных полостях.
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2015 |
|
RU2602934C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ПРЕССА | 2013 |
|
RU2515779C1 |
| ГИДРОПРИВОД ПОДВИЖНОЙ ТРАВЕРСЫ ВЕРТИКАЛЬНОГО ПРЕССА | 2018 |
|
RU2687122C1 |
| Способ приготовления пластин для тонкослойной хроматографии сахаров и компонентов нуклеиновых кислот | 1985 |
|
SU1318906A1 |
| WO 2013167630 A1, 14.11.2013 | |||
| ГОЙДО М.Е | |||
| и др., Снижение колебаний давления в наполнительно-сливном трубопроводе гидросистемы ковочного пресса | |||
| Кузнечно-штамповочное производство | |||
| Обработка материалов давлением | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

