Изобретение относится к оборудованию для нефтяной и газовой промышленности, а именно к устройствам для спуско-подъемных операций с трубами при бурении, ремонте и освоении скважин.
Известен спайдер (ПМ РФ №70680, МПК Е21В 19/10, опубликовано 10.02.2008 г), содержащий:
- корпус с конусным отверстием и зевом, закрываемым поворотной створкой с фиксаторным пальцем,
- клиньевую подвеску, содержащую три клина,
- центральный из которых шарнирно связан с подвеской, а два боковых шарнирно соединены с центральным клином и снабжены пружинами,
- причем в клиньях выполнены пазы, в которых установлены сменные плашки, закрепленные подпружиненными стопорными винтами,
- а клиньевая подвеска шарнирно связана с рычажной системой управления, управляемой, например, ногой оператора.
Недостатком известного спайдера является повышенная трудоемкость и сложность управления, обусловленные его конструкцией, которая при захвате трубы предполагает необходимость предварительного вывода клиньев вверх из конусного отверстия корпуса путем нажатия ногой на педаль рычажной системы управления. Учитывая, что клинья с плашками обладают значительной массой и центры тяжести каждого из них в рабочем положении, т.е. при размещении в конусном отверстии корпуса, смещены к центру клина от оси шарнира, подъем клиньевой подвески будет сопровождаться поворотом клиньев под действием силы их тяжести до положения, при котором ось шарнира и центр тяжести клина с плашкой совпадут в вертикальной плоскости. При этом в процессе подъема клиньевой подвески верхние части плашек, поворачиваясь, будут одновременно сближаться к центру конусного отверстия, а нижние части клиньев, поворачиваясь, при этом будут одновременно удаляться от центра конусного отверстия, в результате чего после вывода клиньев из конусного отверстия корпуса диаметр описанной окружности вокруг нижней части клиньев в верхней точке будет превышать диаметр конусного отверстия в корпусе. Поэтому для обратной посадки клиньев в конусное отверстие корпуса с целью захвата спускаемой трубы, оператор должен ногой через педаль рычажной системы управления удерживать клиньевую подвеску в верхнем положении над конусным отверстием и одновременно вручную поворачивать клинья, чтобы завести нижние части клиньев в конусное отверстие. Учитывая, что в рабочей зоне в этот момент будет находиться труба, подвешенная на крюкоблоке, выполнение этой операции одним оператором неудобно и небезопасно, поскольку ему необходимо одновременно контролировать ногой положение клиньевой подвески над корпусом, а руками осуществлять сведение нижней части всех клиньев к вертикальной оси, проходящей через центр конусного отверстия, и, удерживая их в этом положении, ногой через педаль рычажной системы управления опустить клинья с плашками в конусное отверстие корпуса. Поэтому, исходя из требований промышленной безопасности, для управления известным спайдером необходимо участие, как минимум, еще одного оператора.
Кроме того, известное устройство не обладает достаточной надежностью работы. Это обусловлено тем, что зачастую продольная ось верхней трубы бурильной колонны, установленной в клиньях ротора или на элеваторе может не совпадать с вертикальной осью вышки буровой установки и, следовательно, с осью центра конусного отверстия корпуса известного спайдера, подвешенного на крюкоблоке, что может быть вызвано смещением вышки от вертикали вследствие неравномерной осадки опор вышечного блока, например, от одностороннего расположения свечей на одном из подсвечников. Поэтому при несоосности и непараллельности осей конусного отверстия корпуса и трубы последняя при захвате и удержании известным спайдером будет взаимодействовать не с радиальной выемкой плашек клиньевой подвески, а с их кромками по образующей. При этом будет возникать крутящий момент, от воздействия которого плашки могут поворачиваться в пазах клиньев. При значительной величине этого момента возможен срез подпружиненного стопорного винта, расфиксация плашки, ее выход из паза клина и падение в ствол скважины, что может создать аварийную ситуацию.
Недостатком известного спайдера является также невозможность его применения при спуско-подъемных операциях на скважинах, разрабатываемых с использованием двойной колонны лифтовых труб при одновременной эксплуатации двух пластов, что обусловлено конструкцией известного устройства, позволяющей подвешивание и удержание только одной колонны труб и только соосно оси скважины.
Известен двухколонный спайдер (патент США №4381584, опубликовано 03.05.1983 г.), содержащий:
- корпус с двумя сквозными конусными отверстиями, состоящий из двух поворотных в горизонтальной плоскости половин, зеркально симметричных относительно линии разъема, жестко соединенных болтом с гайкой с передней стороны и шарнирно соединенных вертикальной осью с задней стороны,
- причем центры конусных отверстий расположены на линии, перпендикулярной линии разъема,
- два захватных механизма, включающие клинья и плашки, взаимодействующие с трубами и установленные с возможностью вертикального перемещения в сквозных конусных отверстиях корпуса, и рычажные механизмы, шарнирно взаимодействующие с клиньями;
- при этом клинья состоят из трех одинаковых взаимодействующих между собой частей,
- привод для каждого захватного механизма в виде гидро- или пневмоцилиндра,
- и два центрирующих стержня, пересекающиеся под прямым углом в точке пересечения линии разъема и линии, соединяющей центры конусных отверстий, и расположенные в горизонтальной плоскости ниже захватных механизмов в отверстиях, выполненных в половинах корпуса под углом 45° к линии разъема,
- причем центр корпуса располагается на линии разъема посредине между конусными отверстиями.
Недостатком известного устройства являются повышенные материальные и временные затраты при вводе его в эксплуатацию ввиду необходимости монтажа коммуникаций и линий управления для приведения в действие механизированных приводов захватных механизмов, а также на их обслуживание в процессе эксплуатации. Кроме того, как гидро-, так и пневмопривод обладают пониженной надежностью работы при низких температурах, что ограничивает эксплуатационные возможности известного двухколонного спайдера. Эксплуатационные возможности известного устройства ограничиваются также и наличием в его конструкции центрирующих стержней, которые вплотную расположены к поверхности спускаемых труб. Поэтому известный спайдер можно применять только при спуске безмуфтовых труб, поскольку муфты или замки, соединяющие трубы, имеют диаметр больший, нежели трубы, и центрирующие стержни будут препятствовать их проходу через конусное отверстие корпуса.
Это же обстоятельство повышает трудоемкость эксплуатации известного спайдера, поскольку центрирующие стержни требуется демонтировать перед раскрытием половин корпуса спайдера, что необходимо, например, для увеличения проходного пространства и спуска в скважину оборудования большего диаметра по сравнению со спускаемыми трубами, например, пакера или центратора.
Кроме того, центрирующие стержни снижают безопасность проведения работ на скважине, например, при возникновении нефтегазоводопроявления, когда необходимо оперативно демонтировать спайдер с устья скважины. Однако наличие в компоновке колонны труб оборудования большего диаметра по сравнению с трубами требует предварительного удаления центрирующих стержней, на что необходимо определенное время, за которое аварийная ситуация может усугубиться и перейти в открытый фонтан.
К аналогичным последствиям может привести отказ приводов захватных механизмов, например, из-за порыва трубопровода к гидро- или пневмоцилиндрам или ввиду выхода из строя гидростанции или компрессора, например, при отключении электроэнергии. В этом случае оперативному демонтажу спайдера с устья будут препятствовать захватные механизмы, удерживающие трубы, поскольку при подъеме спайдера вверх по неподвижным трубам насечки плашек благодаря клиньям, взаимодействующим с конусными отверстиями, будут врезаться в трубы, и захватные механизмы будут удерживаться в конусных отверстиях. При этом извлечение захватных механизмов из конусного отверстия путем подъема труб тоже невозможно ввиду того, что насечка плашек работает только на удержание трубы при ее движении вниз, а при движении вверх труба будет беспрепятственно скользить по насечке плашек клиньев, не поднимая их. Кроме того, удалению захватных механизмов будут дополнительно препятствовать рычажные механизмы приводов, поэтому предварительно необходима их разборка, а для раскрытия корпуса с целью демонтажа спайдера с устья скважины с расположенными в конусных отверстиях захватными механизмами необходимо вначале удалить центрирующие стержни и болт с гайкой, соединяющий половины корпуса, что также требует значительных затрат времени.
К недостаткам известного устройства также следует отнести возможную травмоопасность эксплуатации в начале спуска первых труб и ее повышенную трудоемкость, обусловленную необходимостью ручного ориентирования клиньев, которые, будучи шарнирно подвешенными, под действием собственного веса будут поворачиваться и наклоняться к центру конусных отверстий, препятствуя заходу торцопервых труб внутрь захватных механизмов. Безопасное выполнение этой операции требует одновременного участия четырех операторов, из которых двум операторам необходимо одновременно удерживать клинья в вертикальном положении и заводить в проем, образовавшийся между клиньями, концы труб, а еще двум операторам одновременно управлять спуском двух труб и приводами захватных механизмов, что при несогласованности манипуляций и отсутствии должной сноровки операторов может привести к травмам.
Совокупность перечисленных недостатков снижает надежность, безопасность и удобство эксплуатации известного двухколонного спайдера и ограничивает его эксплуатационные возможности.
Задачей изобретения является создание технического решения спайдера, лишенного перечисленных недостатков.
Техническим результатом решения этой задачи является повышение надежности, безопасности и удобства эксплуатации известного спайдера и расширение его эксплуатационных возможностей.
Для обеспечения этого результата известный двухколонный спайдер, содержащий
- корпус с двумя вертикальными сквозными конусными отверстиями, состоящий из двух поворотных в горизонтальной плоскости половин, зеркально симметричных относительно линии разъема, жестко соединяемых в сомкнутом положении с передней стороны и шарнирно соединенных вертикальной осью с задней стороны,
- два захватных механизма, включающие клиновые плашки, взаимодействующие с трубами и установленные с возможностью перемещения в сквозных конусных отверстиях корпуса, и рычажные механизмы, шарнирно взаимодействующие с клиновыми плашками,
- при этом клиновые плашки состоят из нескольких одинаковых взаимодействующих между собой частей,
- и привод для каждого захватного механизма, взаимодействующий с рычажным механизмом,
- причем центр корпуса располагается на линии разъема посредине между конусными отверстиями, которые выполнены в виде усеченных конусов меньшим основанием вниз,
СОГЛАСНО ИЗОБРЕТЕНИЮ
- дополнительно снабжен расположенным под корпусом основанием в виде плиты с центральным отверстием, на верхней плоскости которой с задней стороны жестко закреплена вертикальная ось, шарнирно соединяющая половины корпуса, а с передней стороны до центрального отверстия в плите выполнен сквозной паз,
- и расположенной над корпусом крышкой в виде плиты с центральным отверстием, состоящей из двух поворотных половин, зеркально симметричных относительно линии разъема и шарнирно соединенных с задней стороны вертикальной осью половин корпуса,
- причем каждая половина крышки жестко соединена стойками с нижерасположенной половиной корпуса,
- а диаметры отверстий основания и крышки больше суммы межцентрового расстояния L между сквозными конусными отверстиями корпуса и диаметра d их меньшего основания,
- а также фиксаторами положений половин корпуса «Открыто» или «Закрыто», выполненными в виде пальцев, установленных с возможностью вертикального перемещения в отверстиях, выполненных в каждой из половин корпуса с задней стороны, и взаимодействующих с отверстиями, выполненными в основании, оси которых соосны пальцам в положениях половин корпуса «Открыто» или «Закрыто»,
- при этом жесткое соединение половин корпуса в сомкнутом положении осуществляется стопором, выполненным в виде стержня, взаимодействующим с вертикальными отверстиями, выполненными в каждой из половин корпуса с передней стороны и соосных в их сомкнутом положении,
- центр корпуса совпадает с центрами отверстий основания и крышки, а центры конусных отверстий расположены на линии разъема корпуса, которой конусные отверстия делятся на полуотверстия, при этом переднее конусное отверстие смещено от центра корпуса к его передней стороне, а заднее конусное отверстие смещено от центра корпуса к его задней стороне,
- приводы захватных механизмов объединены с рычажными механизмами и содержат коаксиальные наружные и внутренние валы с жестко закрепленными на них рукоятками ручного управления, рычагами и консолями с коромыслами, расположенные противоположно друг другу на боковых поверхностях половин корпуса и установленные с возможностью вращения в кронштейнах, соединенных с боковыми поверхностями половин корпуса,
- шарнирно соединенные с коромыслами разъемные тяги, состоящие из двух звеньев, соединяемых взаимодействующими между собой зубчатыми рейками, выполненными на каждом звене, при этом фиксация звеньев в соединенном положении осуществляется замком в виде подпружиненной втулки, причем тяга переднего захватного механизма соединена с коромыслами наружных валов, а тяга заднего захватного механизма соединена с коромыслами внутренних валов,
- и фиксаторы открытого положения клиновых плашек, при котором они выдвинуты вверх из конусных отверстий, выполненные в виде пластин с рукоятками и пазами, шарнирно установленными на корпусе и взаимодействующими с выступами на валах,
- каждая клиновая плашка состоит из четырех частей, которые расположены зеркально симметрично относительно линии разъема корпуса и попарно взаимодействуют с одним из полуотверстий сквозных конусных отверстий корпуса, при этом обе пары частей передней клиновой плашки переднего захватного механизма взаимодействуют с полуотверстиями переднего конусного отверстия корпуса, а обе пары частей задней клиновой плашки заднего захватного механизма взаимодействует с полуотверстиями заднего конусного отверстия корпуса, причем обе пары частей передней клиновой плашки попарно соединены с рычагами внутренних валов, а обе пары частей задней клиновой плашки попарно соединены с рычагами наружных валов.
Изобретение поясняется чертежами, где:
- на фиг.1 - показан вид сверху на спайдер перед началом проведения спуско-подъемных операций;
- на фиг.2 - вид А на фиг.1;
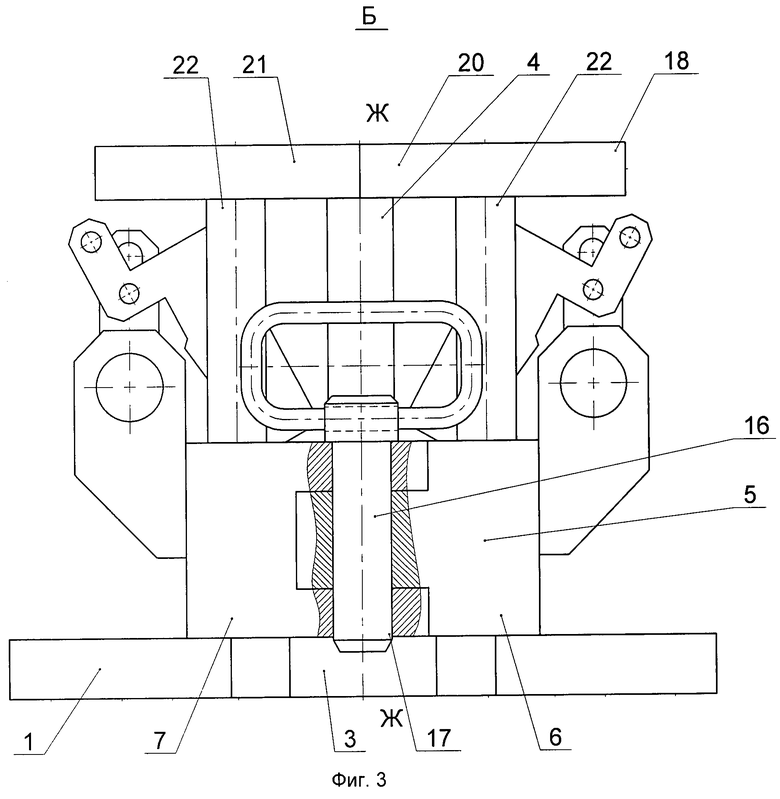
- на фиг.3 - вид Б на фиг.2;
- на фиг.4 - сечение В-В на фиг 2, половины корпуса в положении «Открыто»;
- на фиг.5 - сечение Г-Г на фиг.2 в положении - клиновые плашки подняты из конусных отверстий для проведения спуска или подъема колонн труб;
- на фиг.6 - сечение Д-Д на фиг.2 в положении - клиновые плашки опущены в конусные отверстия для захвата и удержания колонны труб;
- на фиг.7 - вид Е на фиг.1 в положении - тяги соединены;
- на фиг.8 - вид Е на фиг.1 в положении - тяги рассоединены.
Заявляемый спайдер двойной (фиг.1, 2, 3 и 4) содержит основание 1 в виде плиты с центральным отверстием 2, к которому с передней стороны выполнен сквозной паз 3. С задней стороны по продольной оси основания 1, совпадающей с продольной осью паза 3 и центром отверстия 2, на плите жестко закреплена вертикальная ось 4. Сверху на основании 1 размещен корпус 5, состоящий из левой 6 и правой 7 половин, зеркально симметричных относительно линии разъема Ж-Ж и шарнирно закрепленных на вертикальной оси 4 с возможностью поворота в горизонтальной плоскости и переводом корпуса 5 из положения «Открыто» в положение «Закрыто» и наоборот. В положении корпуса 5 «Открыто» осуществляется монтаж или демонтаж заявляемого спайдера с устья скважины при наличии в последней спущенных колонн труб - передней 8 и задней 9 (фиг.4), а в положении «Закрыто» заявляемым спайдером осуществляют спуско-подъемные операции с колоннами труб 8 и 9 (фиг.5 и 6).
Для фиксации корпуса 5 в положениях «Открыто» или «Закрыто» (фиг.1, 2 и 4) половины 6 и 7 снабжены пальцами 10 с рукоятками 11, установленными с возможностью вертикального перемещения в отверстиях 12 и пазах 13, выполненных в каждой из половин 6 и 7 с задней стороны. Фиксация осуществляется взаимодействием пальцев 10 с выполненными в плите, симметрично расположенными относительно продольной оси основания 1 отверстиями 14, соосными пальцам 10 в положении «Открыто», или отверстиями 15, соосными пальцам 10 в положении «Закрыто». Жесткое соединение половин 6 и 7 корпуса 5 в сомкнутом положении (фиг.1 и 3) осуществляется стопором 16, выполненным в виде стержня, взаимодействующим с вертикальными отверстиями 17, выполненными в каждой из половин 6 и 7 корпуса 5 с передней стороны и соосных в положении корпуса 5 «Закрыто».
Над корпусом 5 размещена крышка 18 (фиг.1, 2 и 3) в виде плиты с центральным отверстием 19, состоящей из двух поворотных половин - левой 20 и правой 21, зеркально симметричных относительно линии разъема Ж-Ж и шарнирно соединенных с задней стороны вертикальной осью 4, общей с вертикальной осью 4 половин 6 и 7 корпуса 5, причем каждая половина крышки 18 жестко соединена стойками 22 с нижерасположенной половиной корпуса 5, т.е. половина 20 крышки 18 соединена с половиной 6 корпуса 5, а половина 21 крышки 18 соединена с половиной 7 корпуса 5.
В корпусе 5 (фиг.1, 5 и 6) выполнены сквозные конусные отверстия - переднее 23, смещенное к передней стороне корпуса 5, и заднее 24, смещенное к задней стороне корпуса 5, которые выполнены в виде усеченных конусов меньшим основанием вниз. Центры отверстий 23 и 24 располагаются на линии разъема Ж-Ж зеркально симметрично относительно центра корпуса 5, совпадающего с центрами отверстия 2 основания 1 и отверстия 19 крышки 18, причем каждое конусное отверстие 23 и 24 разделено линией разъема Ж-Ж корпуса 5 на два полуотверстия 25, каждое из которых расположено в одной из половин 6 или 7, и образуют в положении корпуса 5 «Закрыто» конусные отверстия 23 и 24. При этом диаметры отверстия 2 основания 1 и отверстия 19 крышки 18 больше суммы межцентрового расстояния L между отверстиями 23 и 24 и диаметра d их меньшего основания (фиг.1).
Оба захватных механизма - передний 26 и задний 27 содержат клиновые плашки, передняя 28 из которых взаимодействует с трубами 8 и установлена с возможностью перемещения и взаимодействия в переднем отверстии 23 корпуса 5, а задняя 29 взаимодействует с трубами 9 и установлена с возможностью перемещения и взаимодействия в заднем отверстии 24 корпуса 5, причем каждая клиновая плашка 28 и 29 состоит из четырех одинаковых взаимодействующих между собой частей 30, расположенных зеркально симметрично относительно линии разъема Ж-Ж и попарно взаимодействующих с одним из полуотверстий 25.
Приводы захватных механизмов 26 и 27 (фиг.1, 2, 7 и 8) объединены с рычажными механизмами и содержат коаксиальные наружные 31 и внутренние 32 валы, установленные с возможностью вращения в кронштейнах 33, расположенных противоположно друг другу на боковых поверхностях половин 6 и 7 корпуса 5. На наружном валу 31, расположенном на левой половине 6, жестко закреплены рукоятка ручного управления 34, рычаг 35 и консоль 36 с коромыслом 37, а на наружном валу 31, расположенном справа, жестко закреплены рычаг 35 и консоль 36 с коромыслом 37. На внутреннем валу 32, расположенном на левой половине 6, жестко закреплены аналогичная рукоятка ручного управления 38, рычаг 39 и консоль 40 с коромыслом 41, а на внутреннем валу 32, расположенном справа, жестко закреплены рычаг 39 и консоль 40 с коромыслом 41. При этом обе пары частей 30 передней клиновой плашки 28 попарно шарнирно соединены с рычагами 39 внутренних валов 32, а обе пары частей 30 задней клиновой плашки 29 попарно шарнирно соединены с рычагами 35 наружных валов 31.
С коромыслами 37 (фиг.1, 7 и 8) наружных валов 31 заднего захватного механизма 27 шарнирно соединена разъемная тяга 42, а с коромыслами 41 внутренних валов 32 переднего захватного механизма 26 шарнирно соединена разъемная тяга 43. Обе тяги 42 и 43 состоят из двух звеньев 44 и 45, соединяемых взаимодействующими между собой зубчатыми рейками 46, выполненными на каждом звене, при этом фиксация звеньев 44 и 45 в соединенном положении осуществляется замком в виде втулки 47, поджимаемой пружиной 48.
Удерживание клиновых плашек 28 и 29 в открытом положении (фиг.5 и 6), при котором они выдвинуты вверх из конусных отверстий 23 и 24 и не взаимодействуют с трубами 8 и 9, осуществляется фиксаторами 49, шарнирно закрепленными на кронштейнах 33 и выполненными в виде поворотных пластин с рукоятками ручного управления и фигурными пазами 50, взаимодействующими с выступами 51, жестко соединенными с рычагами 35 и 39.
Заявляемый спайдер двухколонный работает следующим образом.
Для осуществления спуско-подъемных операций с двумя колоннами труб спайдер необходимо подготовить к работе и установить на устье скважины. При этом в зависимости от ситуации на устье скважины возможны два варианта подготовки спайдера к работе.
Первый вариант осуществляют в случае, когда в скважине отсутствуют спущенные колонны труб (фиг.1) и необходимо произвести спуск двух колонн труб 8 и 9 (на фиг.4), компоновки которых оснащены скважинным оборудованием, максимальный наружный диаметр которого не превышает диаметр меньшего основания сквозных конусных отверстий 23 и 24. В этом случае заявляемый спайдер, собранный в положении, показанном на фиг.1, 2, 3, 5 и 7, устанавливают основанием 1 на верхний фланец устьевого оборудования (не показан), ориентировочно совмещая центры отверстий основания 1 и верхнего фланца устьевого оборудования.
При этом в конструкции спайдера:
- половины 6 и 7 корпуса 5 зафиксированы в положении «Закрыто» пальцами 10, для чего их вручную перемещают по отверстиям 12 вниз в отверстия 15 основания 1 рукоятками 11, установленными с возможностью вертикального перемещения в пазах 13 (фиг.2);
- жесткое соединение половин 6 и 7 корпуса 5 в сомкнутом положении (фиг.1 и 3) осуществляется стопором 16, взаимодействующим с отверстиями 17, выполненными в каждой из половин 6 и 7 корпуса с передней стороны и соосных в положении корпуса 5 «Закрыто»;
- клиновые плашки 28 и 29 находятся в открытом положении (фиг.1, 2 и 5), при котором они выдвинуты вверх и в стороны от конусных отверстий 23 и 24 и не могут взаимодействовать с трубами 8 и 9. Для перевода плашек 28 и 29 в это положение оператор воздействует на рукоятки ручного управления 34 и 38, жестко соединенные с валами 31 и 32, поворачивая в вертикальное положение соединенные с валами 31 и 32 рычаги 35 и 39, которые, будучи каждый соединенным с двумя частями 30 клиновых плашек 28 и 29, поднимают последние из конусных отверстий 23 и 24 и отводят их в стороны, обеспечивая беспрепятственный проход труб 8 и 9 с оборудованием в скважину. Синхронность поворота валов 31 и 32, а следовательно, и поворота рычагов 35 и 39 и подъема частей 30 клиновых плашек 28 и 29, осуществляется благодаря тому, что валы 31 связаны тягой 42, а валы 32 связаны тягой 43. Каждая из тяг 42 или 43, будучи шарнирно соединенной с коромыслами 37 или 41, расположенными на консолях 36 и 40 валов 31 и 32, образуют кинематически связанный двухкоромысловый шарнирный четырехзвенник и тем самым обеспечивают одновременный поворот на одинаковый угол коромысел 37 или 41, а следовательно, и валов 31 и 32, и связанных с ними рычагов 35 и 39;
- клиновые плашки 28 и 29 удерживаются в открытом положении фиксаторами 49, шарнирно закрепленными на кронштейнах 33 и выполненными в виде поворотных пластин с рукоятками ручного управления и фигурными пазами 50, взаимодействующими с выступами 51. Для этого после поворота рычагов 35 и 39 в вертикальное положение оператор поворачивает фиксаторы 49 (фиг.6) в рабочее положение (фиг.5), заводя фигурные пазы 50 на выступы 51, что удерживает рычаги 35 и 39 в вертикальном положении и предотвращает их обратный поворот в горизонтальное положение, а следовательно, и опускание частей 30 клиновых плашек 28 и 29 в конусные отверстия 23 и 24.
Второй вариант подготовки заявляемого спайдера к работе осуществляют в случае, когда в скважине отсутствуют спущенные колонны труб (фиг.1) и необходимо произвести спуск двух колонн труб 8 и 9 (на фиг.4), компоновки которых оснащены скважинным оборудованием, наружный диаметр которого превышает диаметр меньшего основания сквозных конусных отверстий 23 и 24 и, следовательно, это скважинное оборудование не сможет пройти через отверстия 23 и 24, если корпус 5 будет находиться в сомкнутом положении, показанном на фиг.1. Кроме того, этот вариант подготовки спайдера к работе осуществляют также в случае, когда в стволе скважины находятся спущенные колонны труб 8 и 9 и необходимо произвести их дальнейший спуск с наращиванием трубами 8 и 9.
Поэтому при подготовке заявляемого спайдера к работе перед установкой его на устье, сначала необходимо развести половины 6 и 7 корпуса 5 вместе с половинами 20 и 21 крышки 18 в положение «Открыто», показанное на фиг.4. Для этого осуществляют следующие операции:
- клиновые плашки 28 и 29 переводят в открытое положение (фиг.1, 2 и 5), при котором они выдвинуты вверх и в стороны от конусных отверстий 23 и 24 и не могут взаимодействовать с трубами 8 и 9, и фиксируют их в этом положении (фиг.5). Порядок выполнения этих операций изложен выше при описании первого варианта подготовки спайдера к работе;
- рассоединяют половины 6 и 7 корпуса 5, извлекая стопор 16 из отверстий 17;
- размыкают разъемные тяги 42 и 43 (фиг.7), для чего вручную, преодолевая сопротивление пружины 48, смещают втулки 47 по звеньям 44, расфиксируя соединение зубчатых реек 46 звеньев 44 и 45, после чего звенья 44 и 45, шарнирно связанные с коромыслами 37 и 41, под действием собственного веса поворачиваются в вертикальное положение (фиг.8) и тяги 42 и 43 будут рассоединены;
- разводят переднюю сторону половин 6 и 7 корпуса 5 вместе с половинами 20 и 21 крышки 18 в положение «Открыто», показанное на фиг.4, разворачивая их на поверхности плиты основания 1 благодаря шарнирному соединению осью 4, совмещая оси отверстий 12, выполненных с задней стороны половин 6 и 7 корпуса 5, с осями отверстий 14, выполненных в плите основания 1;
- фиксируют половины 6 и 7 корпуса 5 в положении «Открыто» пальцами 10, для чего вручную перемещают их по отверстиям 12 вниз в отверстия 14 основания 1 рукоятками 11, установленными с возможностью вертикального перемещения в пазах 13.
Перевод корпуса 5 с крышкой 18 в положение «Открыто» обеспечивает:
а) в случае, когда в стволе скважины находятся спущенные колонны труб 8 и 9 - установку спайдера основанием 1 на край верхнего фланца устьевого оборудования (не показан) и возможность последующего перемещения в горизонтальной плоскости на спущенные трубы 8 и 9. Благодаря пазу 3 основание 1 с разведенным в стороны корпусом 5 и крышкой 18 беспрепятственно переместится на спущенные в ствол скважины трубы 8 и 9, которые после ориентировочного совмещения центров отверстия 2 основания 1 и отверстия верхнего фланца устьевого оборудования (не показан) займут необходимое для последующей работы спайдера положение в отверстии 2 основания 1 (фиг.4);
б) в случае, когда производят спуск двух колонн труб 8 и 9, компоновки которых оснащены скважинным оборудованием, наружный диаметр которого превышает диаметр меньшего основания сквозных конусных отверстий 23 и 24 - установку спайдера основанием 1 на верхний фланец устьевого оборудования (не показан) с ориентировочным совмещением центров отверстия 2 основания 1 и отверстия верхнего фланца устьевого оборудования и последующий беспрепятственный спуск через отверстие 2 основания 1 скважинного оборудования, максимальный наружный диаметр которого превышает диаметры d меньшего основания конусных отверстий 23 и 24.
Заключительный процесс работ по второму варианту подготовки заявляемого спайдера к работе включает следующие операции:
- переводят корпус 5 с крышкой 18 в положение «Закрыто» (фиг.1) для чего вначале производят расфиксацию половин 6 и 7 из положения «Открыто» (фиг.4) путем ручного извлечения пальцев 10 рукоятками 11 из отверстий 14 основания 1. Затем поворотом половин 6 и 7 корпуса 5 переводят их в сомкнутое положение и стопором 16, вставленным в соосные отверстия 17, осуществляют жесткое соединение половин 6 и 7 корпуса 5 (фиг.3);
- соединяют разъемные тяги 42 и 43 (фиг.7 и 8), для чего вручную, преодолевая сопротивление пружины 48, смещают втулки 47 по звеньям 44, открывая на них зубчатые рейки 46 для взаимодействия с аналогичными зубчатыми рейками 46 звеньев 45, после чего поворачивают шарнирно связанные с коромыслами 37 и 41 звенья 44 и 45, соединяют зубчатые рейки 46 и отпускают втулку 47, которая от воздействия пружины 48 сместится, замыкая соединение реек 46.
Таким образом, в результате выполнения подготовительных работ заявляемый спайдер будет находиться на верхнем фланце устьевого оборудования (не показан) в положении, показанном на фиг.1 с трубами 8 и 9, проходящими через сквозные конусные отверстия 23 и 24, и муфтами этих труб, расположенными над крышкой 18 и подвешенными на элеваторе для спуска-подъема двух колонн труб (не показан). При этом клиновые плашки 28 и 29 находятся в открытом положении (фиг.1, 2 и 5), при котором они выдвинуты вверх и в стороны от конусных отверстий 23 и 24, не могут взаимодействовать с трубами 8 и 9 и удерживаются в этом положении фиксаторами 49.
Дальнейший порядок работы со спайдером после выполнения подготовительных работ будет зависеть от того, какие операции предполагают осуществлять с колоннами труб 8 и 9 (на фиг.4) - спуск или подъем.
В случае, когда необходимо произвести спуск колонн труб 8 и 9 с наращиванием их трубами 8 и 9 осуществляют следующие операции:
1. Трубы 8 и 9 опускают в скважину перемещением вниз элеватора для спуска-подъема двух колонн труб до положения, при котором муфта трубы 8 расположится над крышкой 18 спайдера в зоне, высотная отметка которой удобна оператору для осуществления свинчивания с этой муфтой следующей наращиваемой трубы 8.
2. Стопор 51 внутреннего вала 32 освобождается от фиксаторов 49 и поворотом рукоятки 38 клиновая плашка 28 переводится в рабочее положение (фиг.6), при котором она вставлена в конусное отверстие 23 и взаимодействует с трубой 8.
3. При дальнейшем спуске труба 8 будет неподвижна, т.к. клиновая плашка 28 осуществит ее немедленный захват и удерживание, а трубу 9 опускают далее, до положения ее муфты ниже муфты трубы 8 на некоторое расстояние, после чего спуск приостанавливается.
4. Стопор 51 наружного вала 31 освобождается от фиксаторов 49 и поворотом рукоятки 34 клиновая плашка 29 переводится в рабочее положение (фиг.6), при котором она вставлена в конусное отверстие 24 и взаимодействует с трубой 9.
5. При дальнейшем спуске труба 9 будет неподвижна, т.к. клиновая плашка 29 осуществит ее немедленный захват и удерживание.
6. После захвата и удерживания труб 8 и 9 спайдером элеватор рассоединяется с ними для подъема следующей партии из двух труб 8 и 9, необходимых для наращивания (удлинения) спускаемых колонн.
7. Вновь поднятые элеватором для спуска-подъема двух колонн трубы 8 и 9 свинчиваются с муфтами удерживаемых заявляемым спайдером труб 8 и 9, при этом положение муфт, разнесенных по высоте, обеспечивает удобство работы оператора.
8. После наращивания трубы 8 и 9 приподнимают элеватором для их рассоединения с клиновыми плашками 28 и 29, при этом вначале будет приподнята, будучи нижестоящей, труба 9, а затем труба 8, после чего клиновые плашки 28 и 29 переводят в открытое положение (фиг.5) и фиксируют. Порядок выполнения этой операции изложен выше при описании первого варианта подготовки спайдера к работе.
9. Далее цикл повторяется - вновь производится спуск труб 8 и 9 в скважину на величину длины навинченной трубы, после чего осуществляется дальнейшее их наращивание до достижения необходимой глубины спуска.
В случае, когда необходимо произвести подъем колонн труб 8 и 9 из ствола скважины осуществляют операции в последовательности, обратной операциям спуска, для чего:
1. Трубы 8 и 9 поднимают из скважины элеватором для спуска-подъема двух колонн труб до подъема над крышкой 18 муфт нижерасположенных труб 8 и 9. При этом муфту нижерасположенной трубы 8 располагают над крышкой 18 спайдера в зоне, высотная отметка которой удобна оператору для действий по отвинчиванию вышерасположенной трубы 8 от этой муфты.
2. Стопор 51 внутреннего вала 32 освобождается от фиксаторов 49 и поворотом рукоятки 38 клиновая плашка 28 переводится в рабочее положение (фиг.6), при котором она вставлена в конусное отверстие 23 и взаимодействует с трубой 8.
3. Трубы 8 и 9 приспускают, при этом нижерасположенная труба 8 будет неподвижна, т.к. клиновая плашка 28 осуществит ее немедленный захват и удерживание, а трубу 9 опускают далее до положения муфты нижерасположенной трубы 9 ниже муфты нижерасположенной трубы 8 на некоторое расстояние, после чего спуск приостанавливается.
5. Стопор 51 наружного вала 31 освобождается от фиксаторов 49 и поворотом рукоятки 34 клиновая плашка 29 переводится в рабочее положение (фиг.6), при котором она вставлена в конусное отверстие 24 и взаимодействует с трубой 9.
6. При дальнейшем спуске нижерасположенная труба 9 будет неподвижна, т.к. клиновая плашка 29 осуществит ее немедленный захват и удерживание.
7. После отворота труб 8 и 9, подвешенных на элеваторе, их отводят в сторону и опускают на мостки.
8. На удерживаемые заявляемым спайдером трубы 8 и 9 устанавливают элеватор для спуска-подъема двух колонн труб и приподнимают для их рассоединения с клиновыми плашками 28 и 29, при этом вначале будет приподнята труба 9, будучи нижестоящей, а затем труба 8, после чего клиновые плашки 28 и 29 переводят в открытое положение (фиг.5) и фиксируют. Порядок выполнения этой операции изложен выше при описании первого варианта подготовки спайдера к работе.
9. Далее цикл повторяется - вновь производится подъем труб 8 и 9 из скважины на величину длины навинченных труб, после чего осуществляется их отсоединение от колонн труб 8 и 9.
Таким образом, благодаря конструктивным особенностям заявляемого спайдера обеспечивается:
- минимизация временных и материальных затрат при монтаже и вводе его в эксплуатацию по сравнению с прототипом. Это обусловлено тем, что в заявляемом спайдере используется ручной привод управления захватными механизмами, у которого отсутствует необходимость монтажа коммуникаций и линий управления для приведения в действие имеющихся у прототипа гидро- или пневмомеханизированных приводов захватных механизмов, а также на их обслуживание в процессе эксплуатации;
- повышение надежности его работы ввиду наличия ручного привода по сравнению с прототипом, у которого, например, из-за порыва трубопровода к гидро- или пневмоцилиндрам или ввиду выхода из строя гидростанции или компрессора, например, при отключении электроэнергии произойдет отказ приводов захватных механизмов, что приведет к перерывам в работе на время ремонта и восстановления работоспособности;
- расширение его эксплуатационных возможностей ввиду наличия ручного привода по сравнению с прототипом, гидро- или пневмомеханизированные приводы захватных механизмов которого обладают пониженной надежностью работы при низких температурах;
- повышение безопасности работ на скважине с использованием заявляемого спайдера благодаря оперативности его монтажа и демонтажа с устья скважины по сравнению с прототипом ввиду того, что конусные отверстия 23 и 24 располагаются на линии разъема корпуса 5, а клиновые плашки 28 и 29 состоят из четырех частей, поэтому для рассоединения заявляемого спайдера с трубами 8 и 9 достаточно извлечь стопор 16, соединяющий половины 6 и 7 корпуса 5. Эта же операция у прототипа требует гораздо большего времени для предварительного удаления центрирующих стержней и болта с гайкой, соединяющих половины корпуса;
- защита рычажных механизмов и клиновых плашек благодаря крышке, закрывающей их от возможных повреждений, вызываемых ударами грузоподъемного оборудования при погрузочно-разгрузочных работах, транспортировке и эксплуатации, что повышает надежность его работы по сравнению с прототипом.
Совокупность перечисленных обстоятельств обеспечивает удобство эксплуатации и обслуживания, повышение надежности и безопасности работы, а также расширение эксплуатационных возможностей заявляемого спайдера по сравнению с аналогом и прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176305C1 |
| ПРОТИВОСИФОННОЕ ГЕРМЕТИЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2558050C1 |
| СПОСОБ ГЕРМЕТИЗАЦИИ ПОЛОСТИ ТРУБ И ЗАТРУБНОГО ПРОСТАНСТВА СКВАЖИНЫ, ПРОТИВОСИФОННОЕ ГЕРМЕТИЗИРУЮЩЕЕ УСТРОЙСТВО "ПГУ-2", ПРОМЫВОЧНАЯ КАТУШКА "ПК-1" | 2013 |
|
RU2563845C2 |
| КОМПОНОВКА ИНСТРУМЕНТОВ ДЛЯ ПРОРЕЗКИ БОКОВОГО "ОКНА" В ОБСАДНОЙ КОЛОННЕ СКВАЖИНЫ И СПОСОБ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И КРЕПЛЕНИЯ КЛИНА-ОТКЛОНИТЕЛЯ | 2009 |
|
RU2410525C1 |
| СПАЙДЕР | 1990 |
|
RU2030542C1 |
| Ротор для бурения скважин | 1959 |
|
SU139628A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ | 1989 |
|
RU2068070C1 |
| КОМПОНОВКА ИНСТРУМЕНТОВ ДЛЯ ПРОРЕЗКИ БОКОВОГО "ОКНА" В ОБСАДНОЙ КОЛОННЕ СКВАЖИНЫ | 2008 |
|
RU2370626C1 |
| УСТРОЙСТВО ДЛЯ ГЕРМЕТИЗАЦИИ УСТЬЯ СКВАЖИНЫ, УЗЕЛ УПЛОТНИТЕЛЕЙ И УЗЕЛ СТОПОРНЫХ ПЛАШЕК | 1995 |
|
RU2088745C1 |
| Зажимное устройство | 1974 |
|
SU927956A1 |







Изобретение относится к оборудованию для нефтяной и газовой промышленности, а именно к устройствам для спуско-подъемных операций с трубами при бурении, ремонте и освоении скважин. Спайдер содержит корпус с двумя вертикальными сквозными конусными отверстиями, состоящий из двух поворотных в горизонтальной плоскости половин, зеркально симметричных относительно линии разъема, жестко соединяемых в сомкнутом положении с передней стороны стопором, выполненным в виде стержня. А также содержит два захватных механизма, включающих клиновые плашки, установленные с возможностью перемещения в сквозных конусных отверстиях корпуса и состоящие из четырех частей, и рычажные механизмы, шарнирно взаимодействующие с клиновыми плашками. Снабжен приводом для каждого захватного механизма, взаимодействующим с рычажным механизмом. Под корпусом расположено основание в виде плиты с центральным отверстием, с передней стороны до центрального отверстия в плите выполнен сквозной паз. Над корпусом расположена крышка в виде плиты с центральным отверстием, состоящая из двух поворотных половин, жестко соединенных стойками с нижерасположенной половиной корпуса. Устройство снабжено вертикальной осью, жестко закрепленной на верхней плоскости основания с задней стороны и шарнирно соединяющей с задней стороны половины корпуса, половины крышки. При этом спайдер оснащен фиксаторами положений половин корпуса «Открыто» или «Закрыто» и фиксаторами открытого положения клиновых плашек. Центры конусных отверстий расположены на линии разъема корпуса, которой конусные отверстия делятся на полуотверстия. Приводы захватных механизмов объединены с рычажными механизмами и содержат коаксиальные наружные и внутренние валы с жестко закрепленными на них рукоятками ручного управления, рычагами и консолями с коромыслами, расположенные противоположно друг другу на боковых поверхностях половин корпуса и установленные с возможностью вращения в кронштейнах, соединенных с боковыми поверхностями половин корпуса. Приводы захватных механизмов также содержат шарнирно соединенные с коромыслами разъемные тяги, состоящие из двух звеньев, соединяемых взаимодействующими между собой зубчатыми рейками, выполненными на каждом звене, при этом фиксация звеньев в соединенном положении осуществляется замком в виде подпружиненной втулки. Причем тяга переднего захватного механизма соединена с коромыслами наружных валов, а тяга заднего захватного механизма соединена с коромыслами внутренних валов. Части каждой клиновой плашки расположены зеркально симметрично относительно линии разъема корпуса и попарно взаимодействуют с одним из полуотверстий сквозных конусных отверстий корпуса. При этом обе пары частей передней клиновой плашки попарно соединены с рычагами внутренних валов, а обе пары частей задней клиновой плашки попарно соединены с рычагами наружных валов. Обеспечивает удобство эксплуатации и обслуживания, повышение надежности и безопасности работы, а также расширение эксплуатационных возможностей. 8 ил.
Спайдер двухколонный, содержащий корпус с двумя вертикальными сквозными конусными отверстиями, состоящий из двух поворотных в горизонтальной плоскости половин, зеркально симметричных относительно линии разъема, жестко соединяемых в сомкнутом положении с передней стороны и шарнирно соединенных вертикальной осью с задней стороны, два захватных механизма, включающие клиновые плашки, взаимодействующие с трубами и установленные с возможностью перемещения в сквозных конусных отверстиях корпуса, и рычажные механизмы, шарнирно взаимодействующие с клиновыми плашками, при этом клиновые плашки состоят из нескольких одинаковых взаимодействующих между собой частей, и привод для каждого захватного механизма, взаимодействующий с рычажным механизмом, причем центр корпуса располагается на линии разъема посредине между конусными отверстиями, которые выполнены в виде усеченных конусов меньшим основанием вниз, согласно изобретению дополнительно снабжен расположенным под корпусом основанием в виде плиты с центральным отверстием, на верхней плоскости которой с задней стороны жестко закреплена вертикальная ось, шарнирно соединяющая половины корпуса, а с передней стороны до центрального отверстия в плите выполнен сквозной паз, и расположенной над корпусом крышкой в виде плиты с центральным отверстием, состоящей из двух поворотных половин, зеркально симметричных относительно линии разъема и шарнирно соединенных с задней стороны вертикальной осью половин корпуса, причем каждая половина крышки жестко соединена стойками с нижерасположенной половиной корпуса, а диаметры отверстий основания и крышки больше суммы межцентрового расстояния L между сквозными конусными отверстиями корпуса и диаметра d их меньшего основания, а также фиксаторами положений половин корпуса «Открыто» или «Закрыто», выполненными в виде пальцев, установленных с возможностью вертикального перемещения в отверстиях, выполненных в каждой из половин корпуса с задней стороны, и взаимодействующих с отверстиями, выполненными в основании, оси которых соосны пальцам в положениях половин корпуса «Открыто» или «Закрыто», при этом жесткое соединение половин корпуса в сомкнутом положении осуществляется стопором, выполненным в виде стержня, взаимодействующим с вертикальными отверстиями, выполненными в каждой из половин корпуса с передней стороны и соосных в их сомкнутом положении, центр корпуса совпадает с центрами отверстий основания и крышки, а центры конусных отверстий расположены на линии разъема корпуса, которой конусные отверстия делятся на полуотверстия, при этом переднее конусное отверстие смещено от центра корпуса к его передней стороне, а заднее конусное отверстие смещено от центра корпуса к его задней стороне, приводы захватных механизмов объединены с рычажными механизмами и содержат коаксиальные наружные и внутренние валы с жестко закрепленными на них рукоятками ручного управления, рычагами и консолями с коромыслами, расположенные противоположно друг другу на боковых поверхностях половин корпуса и установленные с возможностью вращения в кронштейнах, соединенных с боковыми поверхностями половин корпуса, шарнирно соединенные с коромыслами разъемные тяги, состоящие из двух звеньев, соединяемых взаимодействующими между собой зубчатыми рейками, выполненными на каждом звене, при этом фиксация звеньев в соединенном положении осуществляется замком в виде подпружиненной втулки, причем тяга переднего захватного механизма соединена с коромыслами наружных валов, а тяга заднего захватного механизма соединена с коромыслами внутренних валов, и фиксаторы открытого положения клиновых плашек, при котором они выдвинуты вверх из конусных отверстий, выполненные в виде пластин с рукоятками и пазами, шарнирно установленными на корпусе и взаимодействующими с выступами на валах, каждая клиновая плашка состоит из четырех частей, которые расположены зеркально симметрично относительно линии разъема корпуса и попарно взаимодействуют с одним из полуотверстий сквозных конусных отверстий корпуса, при этом обе пары частей передней клиновой плашки переднего захватного механизма взаимодействуют с полуотверстиями переднего конусного отверстия корпуса, а обе пары частей задней клиновой плашки заднего захватного механизма взаимодействует с полуотверстиями заднего конусного отверстия корпуса, причем обе пары частей передней клиновой плашки попарно соединены с рычагами внутренних валов, а обе пары частей задней клиновой плашки попарно соединены с рычагами наружных валов.
| US 4381584 A, 03.05.1983 | |||
| Элеватор-спайдер | 1961 |
|
SU143754A1 |
| Элеватор-спайдер | 1980 |
|
SU891887A1 |
| Элеватор-спайдер | 1981 |
|
SU994679A2 |
| Устройство для захвата труб | 1988 |
|
SU1553647A1 |
| СПАЙДЕР | 1990 |
|
RU2030542C1 |
| ТРЕХЗНАЧНЫЙ СВЕТОВОЙ СИГНАЛ ДЛЯ РЕГУЛИРОВАНИЯ УЛИЧНОГО ДВИЖЕНИЯ | 1934 |
|
SU38019A1 |
| Прибор для измерения кривизны буровых скважин и получения ориентированного керна | 1947 |
|
SU70680A1 |
| 0 |
|
SU201283A1 | |

