(54) ЭЛЕВАТОР-СПАЙДЕР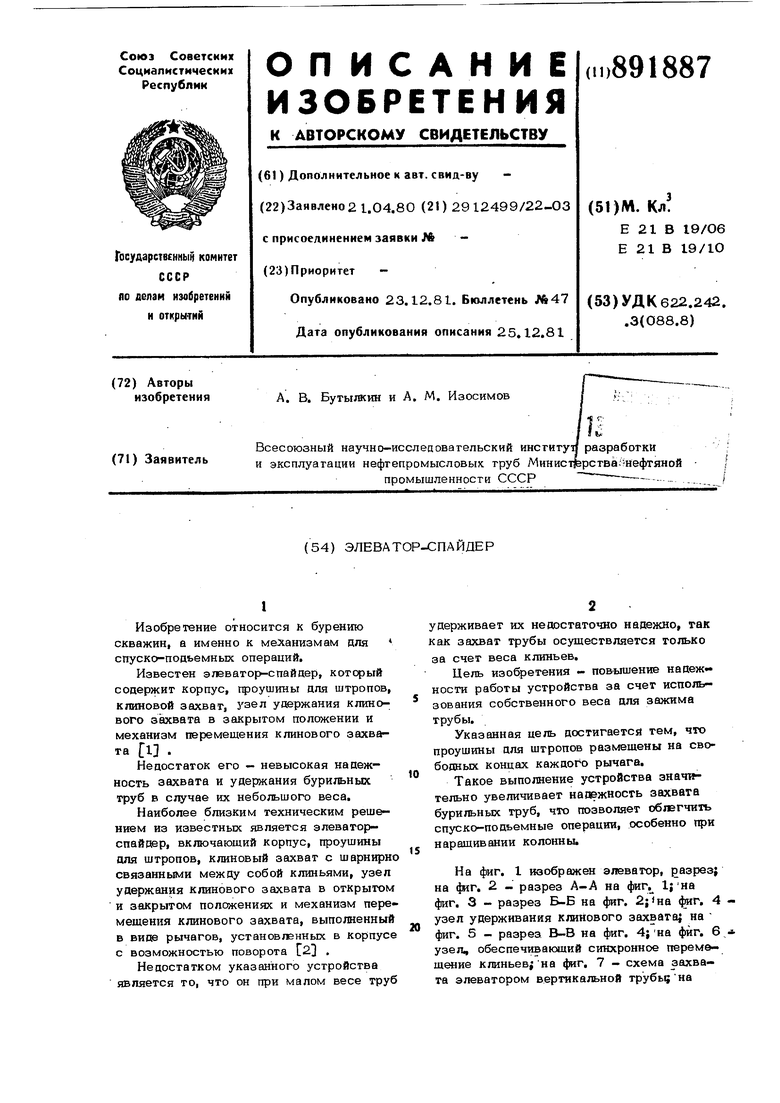
| название | год | авторы | номер документа |
|---|---|---|---|
| Элеватор-спайдер | 1981 |
|
SU994679A2 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176016C1 |
| СПАЙДЕР ДВУХКОЛОННЫЙ | 2013 |
|
RU2517107C1 |
| Спайдер-элеватор | 1976 |
|
SU643619A1 |
| Элеватор-спайдер | 1980 |
|
SU874960A1 |
| ЭЛЕВАТОР ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 1997 |
|
RU2128767C1 |
| Устройство для спуска и подъема колонны труб в скважину | 1980 |
|
SU1110890A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176305C1 |
| Устройство для захвата труб при спуско-подъемных операциях | 1980 |
|
SU1008405A1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ СКВАЖИН | 1992 |
|
RU2018617C1 |
1
Изобретение относится к бурению скважин, а именно к механизмам для спуско-подьемных операций.
Известен элевато{)-спайдер, который содержит корпус, проушины для штропов, клиновой захват, узел удержания клинового захвата в закрытом положении и механизм перемещения клинового захвата 1 .
Недостаток его - невысокая надежность захвата и удержания бурильных труб в случае их небольшого веса.
Наиболее близким техническим решением из известных является элеватор- спайиер, включающий корпус, проушины для штропов, клиновый захват с шарнирно связанными между собой клиньями, узел удержания клинового захвата в открытом и закрытом положениях и механизм пере мещения клинового захвата, выполненный в виде рычагов, установ/юнных в корпусе с возможностью поворота 2 .
Недостатком указанного устройства является то, что он при малом весе труб
удерживает их недостаточно надежно, так как захват трубы осуществляется только за счет веса клиньев.
Цель изобретения - повышение надежности работы устройства за счет использования собственного веса для зажима трубы.
Указанная цель достигается тем, что проушины для штропов размешены на свободных концах каждого рычага.
to
Такое выполнение устройства значительно увеличивает наоежность захвата бурильных труб, что позволяет обшгчить спуско-подьемные операции, особенно при наращивании колонны.
IS
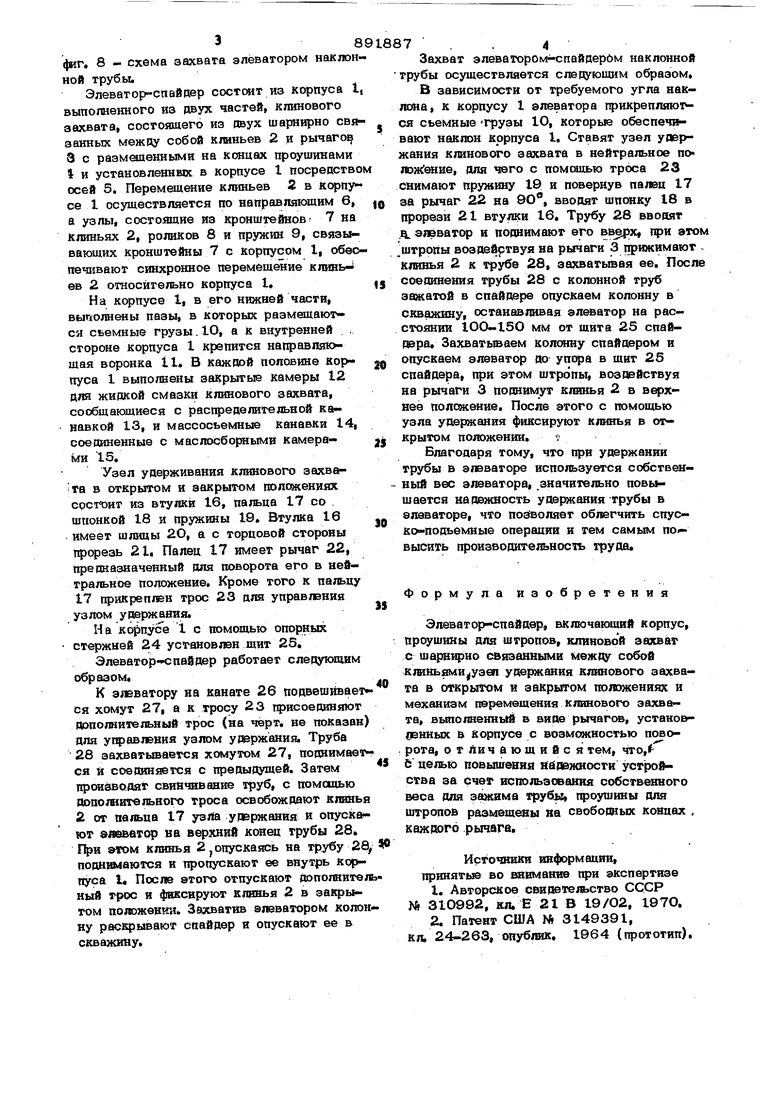
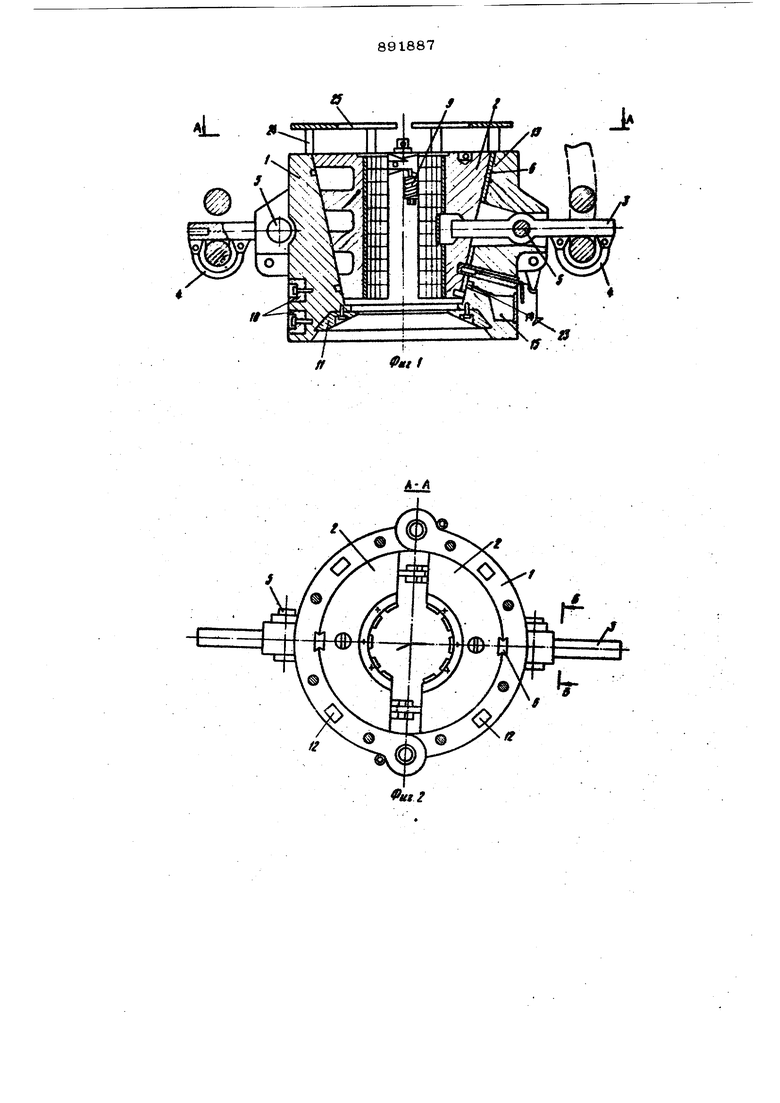
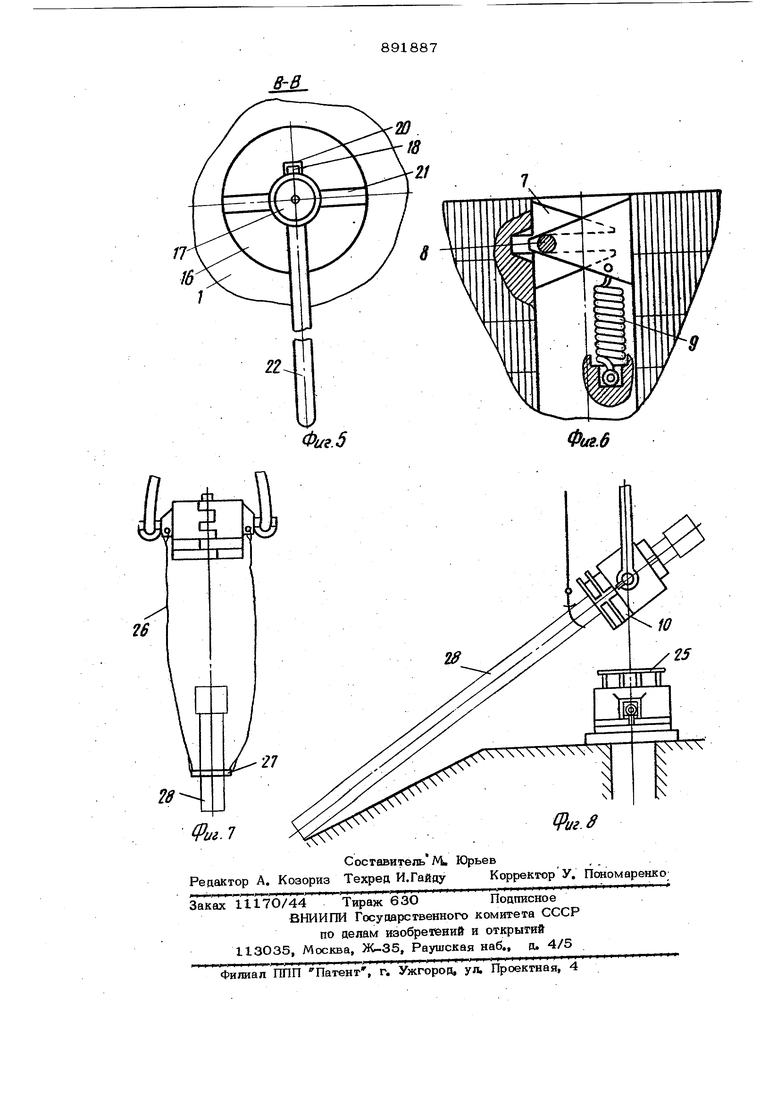
На фиг. 1 изображен элеватор, разрез} на фиг. 2 - разрез А-А на фиг. IjHa фиг. 3 - разрез Б-Б на фиг. фиг. 4 узел удерживания клинового захвата; на
20 фиг. 5 - разрез В-В на фиг. 4;на фиг. 6 узел, обеспечивающий синхронное перемещение клиньев; на фиг. 7 - схема захвата элеватором вертикальной трубьчна |иг, 8 - схема захвата элеватором наклонной грубы. Элеватор-СПаи дер состоит из корпуса 1 выполненного из двух частей, клинового захвата, состоящего из двух шарнирно связанных между собой клиньев 2 и рычаго 3 с размш1енными на концах проушинами 1и установленн1ях в корпусе I посредство осей 5. Перемещение клиньев 2 в корпу се 1 осуществляется по направпякшим в, а узлы, состо5пцие из кронштейнов- 7 на клиньях 2, роликов 8 и пружин 9, связывающих кронштейны 7 с корпусом 1, обеспечивают синхронное перемещение клинь« ев 2 относительно корпуса 1, Н а корпусе I, в его нижней части, выг1олнш1ы пазы, в которых размещаются сьемные грузы. 10, а к внутренней стороне корпуса I крепится направпшощая воронка 11. В каждой половине корпуса 1 выполнены закрытые камеры 12 дгш жидкой смазки клинового захвата, сообщающиеся с распределительной канавкой 13, и массосьемные канавки 14, соединенные с маслосборнымн камерами 15, Узел удерживания клинового захвата в открытом и закрытом положениях срсчгоит из втулки 16, пальца 17 со шпонкой 18 и пружины 19. Втулка 1в имеет шлицы 2О, а с торцовой стороны тфорезь 21, Папец 17 имеет рычаг 22, предназначенный для поворота его в нейтральное положение. Кроме того к пальцу 17 прикрептн трос 23 дпя управшния узлом удержания. На корпусе 1 с помощью опорных стержней 24 установлен щит 25. Элеватор-спай дер работает следующим образом. К элгватору на канате 26 подвешивает ся хомут 27, а к тросу 23 присоединяют дополнительный трос (на черт, не показан для управшния узлом удержаниа Труба 28 захватывается хомутом 27, поднимает ся 1/1 соешшяется с предыдущей. Затем произво т свинчивание труб, с помощью Дополнительного троса освобождают клинья 2от пальца 17 узл1а упгржания и опускают элеватор на верхний конец трубы 28. &fOM клинья 2 J опускаясь на трубу 28 подН1Мвются и пропускают ее внутрь корпуса 1« Поспе зтого отпускают Дополнител ный трос и фиксируют клинья 2 в закрььтом пояоженни. Захватив алеватором колон ну рас1фывают саайдер и опускают ее в скважину. Захват элеватор01ъф пайдер6м наклонной трубы осуществляется следующим образом. В зависимости от требуемого угла наклона, к корпусу I элеватора прикрепляются сьемные -грузы Ю, которые обеспечивают наклон корпуса I. Ставят узел удержания клинового захвата в нейтральное по , для чего с помощью троса 23 снимают пружину 19 и псвернув палец 17 за рычаг 22 на 90°, вводят шпонку 18 в прорези 21 втулки 16. Трубу 28 вводят .Щ;. элеватор и поднимают его , при этом штропы воздействуя на рычаги 3 прижимают клинья 2 к трубе 28, захватывая ее. После соединения трубы 28 с ко;юнной труб зажатой в спайдере опускаем колонну в скважину, останавливая элеватор на расстоянии 1ОО-15О мм от щита 25 спайдера. Захватываем колонну СП аи дером и опускаем элеватор «ю упора в щит 25 спай дера, при этом штропы, воздействуя на рычаги 3 поднимут клинья 2 в верхнее полож 1ие. После этого с помощью узла удержания фиксируют клинья в открытом положении. 9 Благодаря тому, что при удержании трубы в ашваторе используется собственный вес элеватора, значительно повышается надежность удержания трубы в элеваторе, что погйзоляет облегчить спуско-подьемные операции и тем самым по высить производительность труда. Формула изобретения Элеватор-спайдер, включакяций корпус, проушины для штропов, клиновой захват с шарнирно связанными между собой клиньями узеп удержания клинового захвата в откры1Ч м и закрытом положениях и механизм перемещения клшювого захвата, выполненный в вигю рычагов, установ1ВННЫХ в корпусе с возможностью поворота, от Аи чающийся тем, что, 5 целью повыш ия вадежности устройства за счет использования собственного веса для зажима трубы, 1фоушины для штропов размещены на свободных концах , каждого рычага. Источники ш{формации, принятые во внимание при экспертизе 1.Авторское свидетеда.ство СССР h6 310992, ЕЛ. Е 21 В 19/О2, 197О. 2.Патент США N 3149391, к а 24-263, опубток. 1964 (пр от отип).
AL
и
Фшг I
Фиг.Ъ
