Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для приема сигналов, способу для приема сигналов и программе для приема сигналов. Более конкретно, настоящее изобретение относится к устройству для приема сигналов, которое компенсирует искажения принятого сигнала, вызванные нелинейностями, для того, чтобы иметь возможность демодуляции или декодирования принятого сигнала более простым способом и на более высокой скорости при передаче цифровых данных с модуляцией на основе амплитудно-фазовой манипуляции (АФМн). Настоящее изобретение также относится к способу для приема сигналов, выполненному для устройства для приема сигналов и программы для приема сигналов, реализующей способ для приема сигналов.
Уровень техники
В последнее время, так как информация, которая передается при радиопередаче цифровых данных, становится разнообразной, и количество передаваемой информации увеличивается, введена модуляция АФМн, имеющая лучшую эффективность использования частот по сравнению с существующей модуляцией на основе фазовой манипуляции (ФМн). Типичными примерами радиопередачи цифровых данных являются цифровое широковещание, которое может быть спутниковым широковещанием или широковещанием с использованием приземных волн, связь с сотовыми телефонами и связь через радиолокальную вычислительную сеть (ЛВС). Однако в случае модуляции АФМн, динамический диапазон амплитудных изменений увеличивается по сравнению с модуляцией ФМн. Таким образом, становятся более сильными эффекты искажений в линии передачи, которые вырабатываются из-за нелинейностей усилителя передаваемого сигнала и усилителя принимаемого сигнала.
В качестве одной из технологий, которую выполняют на стороне устройства для приема сигналов и которая служит в качестве технологии для компенсации искажений принятого сигнала, вызванных нелинейностями, известен способ обнаружения фазовой ошибки при синхронизации несущей и способ вычисления вероятности при декодировании с исправлением ошибок, приняв в качестве опорной точки среднюю сигнальную точку, найденную после компенсации искажений сигнала, вызванных нелинейностями, как раскрыто в интерпретации А стандарта ARIB STD-B44. Для получения большей информации о такой технологии следует обратиться к документам, таким как http://www.arib.or.jp/tyosakenkyu/kikaku_hoso/hoso_std-b044.html.
STD-B44 является стандартом передачи усовершенствованного широкополосного спутникового (ШС) цифрового широковещания. В настоящее время STD-B44 является преемником ARIB STD-B20, который представляет собой ШС цифровое широковещание, которое уже введено в действие на внутреннем рынке. В усовершенствованном ШС цифровом широковещании, сигнал 16 АФМн циклического типа или сигнал 32 АФМн циклического типа недавно принят для реализации передачи с мощностью, большей, чем у передачи, согласно настоящему стандарту. Кроме того, код с низкой плотностью проверок на четность (НППЧ) используется в качестве кода с исправлением ошибок для улучшения эффективности передачи.
В формате передачи усовершенствованного ШС цифрового широковещания, с целью компенсации искажений принятого сигнала, вызванных нелинейностями сигнала АФМн, как у упомянутых выше сигналов, известную последовательность, которая называется сигналом положения переданной сигнальной точки, передают с использованием способа мультиплексирования.
Если передаются сигнальные точки 32 АФМн переданного сигнала, например, по сравнению с первоначально ожидаемой переданной сигнальной точкой, то сигнальные точки принятого сигнала, подверженные искажениям, вызванным нелинейностями, распределяются с помощью точки со сдвигом по амплитуде и/или сдвигом по фазе, которая служит в качестве центра распределения. Таким образом, если выполняется жесткое определение и/или вычисление вероятности при условии, что положение первоначально ожидаемой переданной сигнальной точки выбрано в качестве идеального положения сигнальной точки, то значительно ухудшаются рабочие характеристики синхронизации несущей и/или декодирования с исправлением ошибок.
Сигнал положения переданной сигнальной точки, упомянутый выше, передается с помощью последовательной передачи всех сигнальных точек для одного и того же способа модуляции как переданный основной сигнал соответствующего слота модуляции в известном порядке. Таким образом, для каждой сигнальной точки, устройство для приема сигналов позволяет принять среднее значение сигналов, принятых во время соответствующего периода, для того, чтобы получить положение центральной точки распределения сигнальной точки, подверженной искажениям, вызванным нелинейностями. В результате, выполнив синхронизацию несущей и/или декодирование с исправлением ошибок, приняв это положение (которое было получено таким образом как положение центральной точки распределения сигнальной точки) в качестве идеальной сигнальной точки, можно компенсировать искажения принятого сигнала, вызванные нелинейностями.
Существующая схема демодуляции, которая применяется в устройстве для приема сигналов для усовершенствованного ШС цифрового широковещания, выполнена следующим образом.
Существующая схема демодуляции выполнена с возможностью использования основных секций, включающих в себя схему синхронизации несущих, схему усреднения сигнальных точек, таблицу положений сигнальных точек, жесткий определитель, детектор ошибки фазы, секцию вычисления вероятности и декодер с исправлением ошибок.
Схема синхронизации несущих выполнена как обычная цифровая схема фазовой автоматической подстройки частоты (ФАПЧ). Схема синхронизации несущих выполняет обработку с целью синхронизации принятого сигнала с частотой несущих и фазой волн для того, чтобы минимизировать дисперсию фазовой ошибки, обнаруженной детектором ошибки фазы.
Для синхронизированного детектированного сигнала, который выводится с помощью схемы синхронизации несущих, схема усреднения сигнальных точек вычисляет среднее значение каждой из I и Q составляющих сигнала положения переданной сигнальной точки для каждой сигнальной точки для того, чтобы выработать информацию о положениях сигнальных точек для всех сигнальных точек.
Информация о положениях сигнальных точек, которая вырабатывается с помощью схемы усреднения сигнальных точек, добавляется в таблицу положений сигнальных точек, которая служит в качестве таблицы, которая используется для хранения соотношений между положениями координат сигнальных точек на плоскости IQ, которая используется для отображения одинаковой двоичной картины и многозначной двоичной картины.
Жесткий определитель вычисляет граничную линию на плоскости IQ, когда жесткое определение должно быть сделано на сигнальной точке на основании таблицы положений сигнальных точек, и выполняет обработку на основе жесткого определения, основанную на граничной линии.
Детектор ошибки фазы отыскивает ошибку фазы между значением жесткого определения, которое выводится с помощью жесткого определителя, и синхронизированным детектированным сигналом для того, чтобы обнаружить ошибку фазы.
Секция вычисления вероятности принимает положение сигнальной точки извлеченное из таблицы положений сигнальных точек, в качестве идеальной сигнальной точки для вычисления логарифмического отношения правдоподобия (ЛОП) каждого из бит, составляющих двоичную картину, которая отображается в сигнальных точках.
Декодер с исправлением ошибок декодирует коды с низкой плотностью проверок на четность (НППЧ) на основании ЛОП и выводит данные результата декодирования.
Такая схема демодуляции позволяет выполнить синхронизацию несущей и декодирование с исправлением ошибок для того, чтобы получить в результате только наименьшие ухудшения даже для принятого сигнала с сильно сдвинутыми распределениями амплитуды сигнальной точки и фазы сигнальной точки из-за искажений, вызванных нелинейностями.
Сущность изобретения
Однако в существующей схеме демодуляции необходимо вычислить среднее значение принятых сигналов для каждой сигнальной точки. Таким образом, число многочисленных значений АФМн увеличивается, и чем больше число сигнальных точек, тем больше число вышеупомянутых схем усреднения сигнальных точек, которые требуются. То есть, число вышеупомянутых схем усреднения сигнальных точек, которые требуются, пропорционально числу сигнальных точек. Таким образом, существует недостаток, который заключается в том, что увеличивается масштаб схемы демодуляции.
Помимо этого, чем больше число сигнальных точек, тем меньше частота, на которой передаются сигнальные точки. То есть, частота, на которой передаются сигнальные точки, обратно пропорциональна числу вышеупомянутых сигнальных точек. Таким образом, проблема заключается в том, что время сходимости является большим. Время сходимости определяется как время, которое необходимо для получения достаточных результатов компенсации искажений принятого сигнала, вызванных нелинейностями, путем вычисления среднего значения сигнальных точек.
Таким образом, вариант осуществления настоящего изобретения, обращающий внимание на недостатки, описанные выше, позволяет демодулировать или декодировать принятый сигнал более простым способом и на более высокой скорости при цифровой передаче, основанной на модуляции АФМн, с компенсацией искажений принятого сигнала, вызванных нелинейностями.
Согласно варианту осуществления настоящего изобретения, выполнено устройство для приема сигналов, содержащее;
блок идентификации радиуса, выполненный с возможностью идентификации радиуса, представляющего собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированному с использованием способа модуляции АФМн; и
блок вывода параметров, выполненный с возможностью вывода параметра управления, который относится к процессу демодуляции или декодирования принятого сигнала на основании идентифицированного радиуса.
Можно выполнить конфигурацию, в которой блок идентификации радиуса идентифицирует радиус путем вывода информации, представляющий собой радиус сигнальной точки зоны, включающей в себя модулированный известный символ в кадре, составляющем принятый сигнал.
Можно выполнить конфигурацию, в которой принятый сигнал является широковещательным сигналом усовершенствованного широкополосного спутникового цифрового широковещания, и зона, включающая в себя модулированный известный символ, является зоной, включающей в себя модулированный сигнал положения переданной сигнальной точки.
Можно выполнить конфигурацию, в которой блок идентификации радиуса предварительно сохраняет радиус и фазу на плоскости IQ для каждого из символов модулированного сигнала положения переданной сигнальной точки и выводит информацию, которая используется для идентификации радиуса символа, а также фазы символа в порядке положений символов модулированного сигнала положения переданной сигнальной точки синхронно с принятым сигналом.
Можно выполнить конфигурацию, в которой устройство для приема сигналов дополнительно выполнено с блоком сдвига фазовой составляющей, выполненным с возможностью сдвиговой обработки на фазовой составляющей каждой сигнальной точки принятого сигнала, и блоком усреднения, выполненным с возможностью вычисления среднего значения каждой из составляющих I и Q, включенных в множество сигнальных точек, которые принимают идентифицированный радиус в качестве общего радиуса и имеют фазовые составляющие, уже подверженные сдвиговой обработке для каждого радиуса. Для составляющих I и Q, включенных в сигнальную точку в качестве составляющих, каждая из которых усредняется с помощью блока усреднения, блок вывода параметров вырабатывает информацию о положениях опорных сигнальных точек, которая будет использоваться в качестве опорного сигнала при определении символа принятого сигнала и вычисления вероятности на основании составляющих I и Q сигнальной точки, полученной путем восстановления фазовой составляющей, уже подверженной сдвиговой обработке, до своего первоначального значения, и выводит информацию о положениях опорных сигнальных точек в качестве параметра управления.
В соответствии с другим вариантом осуществления настоящего изобретения, выполнен способ для приема сигналов, включающий в себя:
этап идентификации радиуса, на котором выполняют идентификацию радиуса, представляющего собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции АФМн; и
этап вывода параметров, на котором выполняют вывод параметра управления, который относится к процессу демодуляции или декодирования принятого сигнала на основании идентифицированного радиуса.
В соответствии с другим вариантом осуществления настоящего изобретения, выполнена программа для приема сигналов, которая будет выполняться на компьютере для выполнения функций устройства для приема сигналов, содержащего:
этап идентификации радиуса, на котором выполняют идентификацию радиуса, представляющего собой расстояние от начала координат на плоскости сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции АФМн; и
этап вывода параметров, на котором выполняют вывод параметра управления, который относится к процессу демодуляции или декодирования принятого сигнала на основании идентифицированного радиуса.
В соответствии с вариантами осуществления настоящего изобретения:
на этапе идентификации радиуса идентифицируют радиус, представляющий собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции АФМн; и
на этапе вывода параметров выводят параметр управления, который относится к процессу демодуляции или декодирования принятого сигнала на основании идентифицированного радиуса.
В соответствии с настоящим изобретением, можно демодулировать или декодировать принятый сигнал более простым способом и на более высокой скорости при цифровой передаче, основанной на модуляции АФМн путем компенсации искажений принятого сигнала, вызванных нелинейностями.
Краткое описание чертежей
Фиг.1 - пояснительная схема, показывающая конфигурацию кадра, усовершенствованного ШС цифрового широковещания.
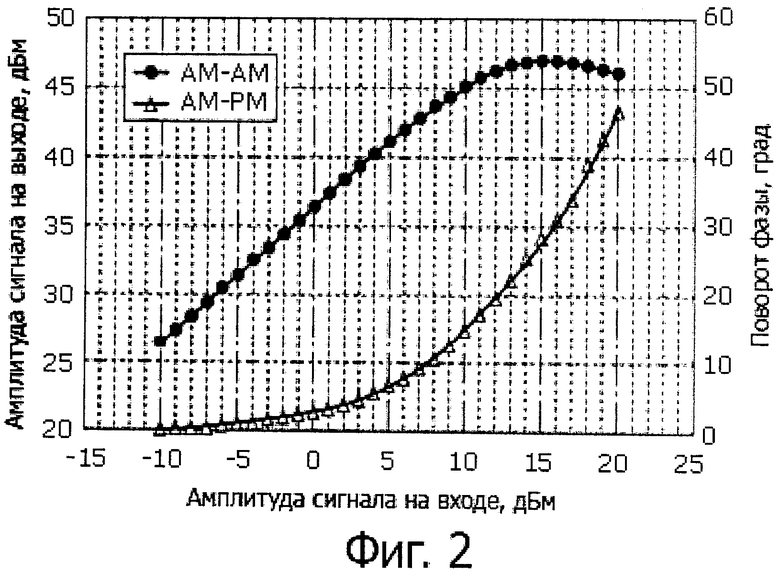
Фиг.2 - пояснительная схема, показывающая нелинейные характеристики усилителя.
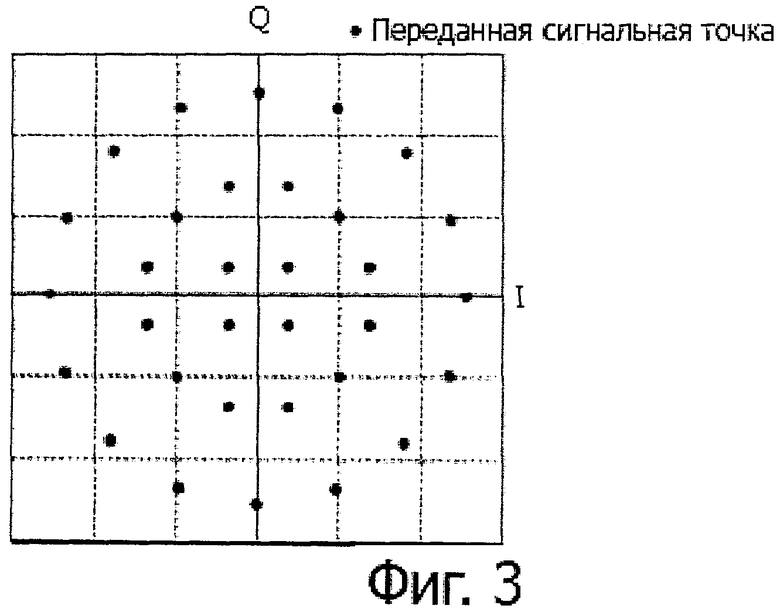
Фиг.3 - пояснительная схема, показывающая сигнальные точки, каждая из которых находится в положении, выраженном координатами I и Q на плоскости IQ, и которые служат в качестве сигнальных точек переданного сигнала, завершающего модуляцию, принимающую способ модуляции 32 АФМн.
Фиг.4 - пояснительная схема, показывающая сигнальные точки, каждая из которых находится в положении, выраженном координатами I и Q на плоскости IQ, и которые служат в качестве сигнальных точек принятого сигнала, завершающего модуляцию, принимающую способ модуляции 32 АФМн.
Фиг.5 - пояснительная схема, которая будет в дальнейшем относиться к описанию типичного процесса вычисления среднего значения положений координат сигнальных точек в сигналах положений переданных сигнальных точек.
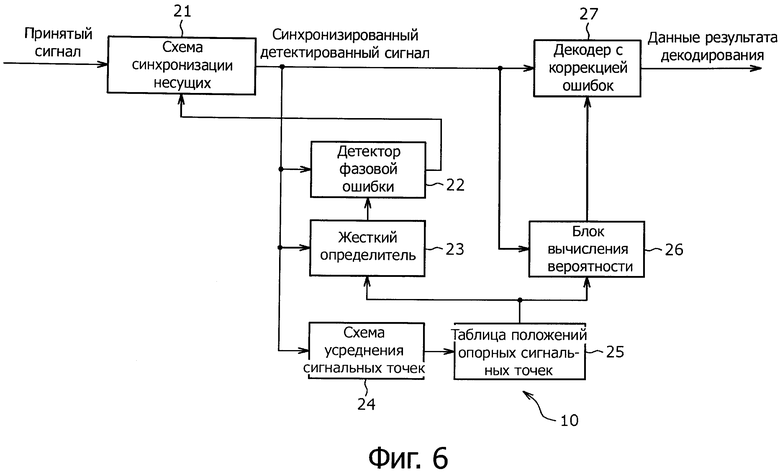
Фиг.6 - блок-схема, показывающая типичную конфигурацию схемы демодуляции.
Фиг.7 - блок-схема, показывающая подробную типичную конфигурацию существующей схемы усреднения сигнальных точек, которая используется в схеме демодуляции, показанной на фиг.6.
Фиг.8 - блок-схема, показывающая подробную типичную конфигурацию схемы усреднения сигнальных точек, которая используется в схеме демодуляции, согласно варианту осуществления настоящего изобретения.
Фиг.9 - пояснительная схема, которая будет в дальнейшем относиться к описанию чисел радиуса и фазы сигнальной точки.
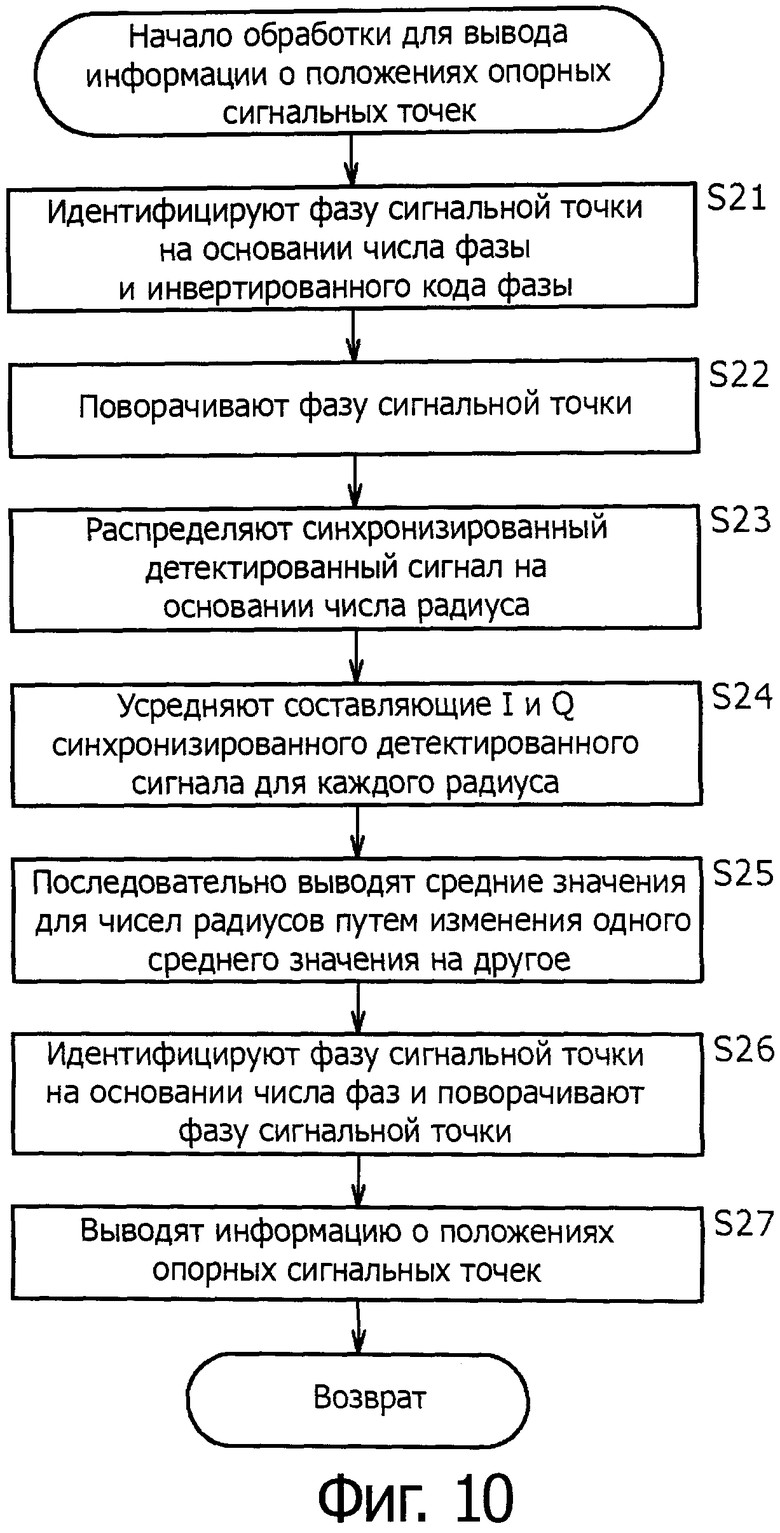
Фиг.10 показывает алгоритм, представляющий собой обработку, предназначенную для вывода информации о положениях опорных сигнальных точек.
Фиг.11 - блок-схема, показывающая типичную конфигурацию устройства декодирования принятого сигнала, согласно другому варианту осуществления настоящего изобретения.
Фиг.12 - блок-схема, показывающая типичную конфигурацию персонального компьютера.
Подробное описание изобретения
Ниже приводится описание варианта осуществления настоящего изобретения со ссылкой на чертежи.
Прежде всего, объяснена конфигурация кадра, усовершенствованного ШС (широкополосного спутникового) цифрового широковещания, которое служит в Японии в качестве широкополосного спутникового цифрового широковещания следующего поколения.
Фиг.1 изображает пояснительную схему, показывающую конфигурацию кадра усовершенствованного ШС цифрового широковещания. Как показано на фигуре, один кадр выполнен так, что он включает в себя 120 слотов модуляции. В этой типичной конфигурации, 120 слотов модуляции называют, соответственно, слотом №1 модуляции - слотом №120 модуляции.
Каждый слот модуляции имеет группу из 24 символов для синхронизации. На фигуре, группа из 24 символов условно обозначена как FSync, SSync и !FSync.
Помимо этого, каждый слот модуляции имеет группу из 32 символов, предназначенную, наряду с другими задачами, для определения положения сигнальной точки. Эта группа из 32 символов называется сигналом положения переданной сигнальной точки и условно обозначается Р.
Каждый из символов является уже известным символом. Группу из 24 символов, которая используется для синхронизации, и группу из 32 символов, которая используется, наряду с другими задачами, для определения положения сигнальной точки, определяют в соответствии со спецификациями.
Группа из 24 символов, которая используется для синхронизации, как описано выше, называется также сигналом синхронизации. В соответствии со спецификациями, слоты модуляции, образующие кадр, представляют собой группу символов FSync, тогда как второй слот модуляции представляет собой группу символов SSync. К тому же, в соответствии со спецификациями, символы !FSync и символы SSync затем назначают поочередно от слота к слоту последующему слоту модуляции, то есть, третьему и пятому слотам модуляции и т.д. Каждый символ !FSync представляет собой инвертированный символ символа FSync.
Так как SSync назначают регулярно каждому другому слоту модуляции, обычно предполагается, что SSync можно использовать для обнаружения заголовка слота модуляции. Помимо этого, FSync назначают первому слоту модуляции. Однако в последующих слотах модуляции используется инвертированный символ. Таким образом, обычно предполагается, что при взгляде на код корреляционного значения, группу !FSync символов можно использовать для обнаружения заголовка каждого из последующих слотов модуляции.
Помимо этого, каждый слот модуляции включает в себя 66 частей переданных данных. Каждые переданные данные состоят из группы из 36 символов. Например, переданные данные, которые включены в слот №1 модуляции, представляют собой данные №1 - данные №66, тогда как переданные данные, включенные в слот №2 модуляции, представляют собой данные №67 - данные №132. Следует отметить, что 66 частей переданных данных, каждая из которых состоит из группы из 136 символов, также называют переданным основным сигналом.
Кроме того, каждый слот модуляции включает в себя ТМСС (символы, сигнализирующие о схеме мультиплексирования и модуляции), каждый из которых предусмотрен между двумя соседними частями переданных данных. ТМСС, состоящая из четырех символов, представляет собой управляющую информацию о передаче и мультиплексировании. На фигуре ТМСС обозначена буквой Т.
Кадр, который выполнен с конфигурацией, описанной выше, и служит в качестве кадра усовершенствованного ШС цифрового широковещания, таким образом, включает в себя всего 1115520 символов.
Помимо этого, в усовершенствованном ШС цифровом широковещании, можно сочетать множество различных способов модуляции внутри каждого кадра. Например, в кадре можно определить вплоть до восьми режимов передачи, и для каждого из режимов передачи можно выбрать один из различных способов модуляции. В усовершенствованном ШС цифровом широковещании можно выбрать пять различных типов способа модуляции, то есть, способов модуляции ДФМн (BPSK), КФМн (QPSK), 8 ФМн (8PSK), 16 ФМн (16 PSK) и 32 ФМн (32 PSK).
В усовершенствованном ШС цифровом широковещании можно определить режим передачи для каждого отдельного слота модуляции и модулировать переданный основной сигнал в соответствии с одним из пяти различных типов способа модуляции. В этом случае, сигналу положения переданной сигнальной точки предписано быть модулированным посредством выбора того же самого способа модуляции, как и у переданного основного сигнала.
Способ модуляции, выбранный для любого слота модуляции специфического кадра, можно идентифицировать путем анализа кадра ТМСС, находящегося впереди специфического кадра на два кадра. Таким образом, устройство для приема сигналов получает и сохраняет все ТМСС, вставленные в каждый из слотов модуляции, которые образуют принятый кадр, находящийся впереди специфического кадра на два кадра для использования в более позднем процессе идентификации способа модуляции, выбранного для любого слота модуляции специфического кадра.
Следует отметить, что, не принимая во внимание режим передачи, выбранный для каждого слота модуляции, сигнал синхронизации, который представляет собой группу из 24 символов, используемых для синхронизации, всегда модулируют с использованием способа модуляции π/2 ДФМн. Помимо этого, не принимая во внимание режим передачи, выбранный для каждого слота модуляции, ТМСС всегда модулируют также с использованием способа модуляции π/2 ДФМн.
Между прочим, если выбран способ модуляции ДФМн, то на принятый сигнал легко оказывать воздействие с помощью нелинейных характеристик усилителя, по сравнению с передачами, выбирающими способ модуляции ФМн. То есть, в случае модуляции АФМн, динамический диапазон изменений амплитуды увеличивается по сравнению с передачами, выбирающими способ модуляции ФМн. Таким образом, эффекты искажений, выработанных на линии передачи из-за нелинейностей усилителя передаваемого сигнала и усилителя принимаемого сигнала, становятся более сильными.
Ниже приведено описание нелинейных характеристик усилителя.
Фиг.2 изображает пояснительную схему, показывающую обычные нелинейные характеристики усилителя. Горизонтальная ось фигуры представляет собой значение амплитуды входного сигнала, тогда как горизонтальная ось фигуры представляет собой значение амплитуды выходного сигнала или поворот фазы выходного сигнала. Помимо этого, на той же самой фигуре, кривая, соединяющая круглые точки, нанесенные на график, представляет собой амплитудную характеристику (АХ), тогда как кривая, соединяющая треугольные точки, нанесенные на график, представляет собой амплитудно-фазовую характеристику (АФХ).
Как видно из амплитудной характеристики, показанной на той же самой фигуре, если амплитуда входного сигнала увеличивается, то амплитуда выходного сигнала также увеличивается. Так как амплитуда входного сигнала превышает значение приблизительно 10 дБм, то амплитуда выходного сигнала больше не увеличивается независимо от изменения амплитуды входного сигнала.
Помимо этого, как видно из амплитудной характеристики, показанной на той же самой фигуре, если амплитуда входного сигнала увеличивается, то поворот фазы выходного сигнала также постепенно увеличивается. Так как входной сигнал превышает значение приблизительно 5 дБм, то поворот фазы выходного сигнала резко увеличивается с увеличением амплитуды входного сигнала.
Например, устройство для приема сигналов, предназначенное для приема сигнала, модулированного на основании принятого способа модуляции АФМн, нуждается в принятии технологии для компенсации искажений при передаче, вызванных с помощью нелинейностей, которые проявляются в усилителе, как показано на фиг.2.
Фиг.3 изображает пояснительную схему, показывающую сигнальные точки, каждая из которых находится на плоскости IQ и служит в качестве сигнальных точек переданного сигнала, завершающего модуляцию, принимающую способ модуляции 32 АФМн. На той же самой фигуре, горизонтальная ось используется в качестве оси I, тогда как вертикальная ось используется в качестве оси Q. Расстояние от центральной точки на фигуре до сигнальной точки, нанесенной на график в положении, имеющем координаты IQ, соответствуют амплитуде. Центральная точка совпадает с положением, имеющим координаты IQ (0, 0). Как показано на той же самой фигуре, каждая точка, нанесенная на график, в положении, имеющем координаты IQ, используется в качестве сигнальной точки, соответствующей символу переданного сигнала. В переданном сигнале, завершающем модуляцию, принимающую способ модуляции 32 АФМн, можно передавать 32 символа различного типа.
То есть, четыре сигнальные точки находятся на кратчайшем расстоянии от центральной точки, тогда как 16 сигнальных точек находятся на самом дальнем расстоянии от центральной точки. Оставшиеся сигнальные точки представляют собой 12 сигнальных точек, находящихся на промежуточном расстоянии, которое равно расстоянию между кратчайшим расстоянием и самым длинным расстоянием от центральной точки.
В устройстве для приема сигналов сигнальная точка, соответствующая символу принятого сигнала, используется для идентификации одного из 32 различных положений координат, показанных на фиг.3, для того, чтобы можно было выполнить демодуляцию и другую обработку переданного сигнала. Однако, как описано ранее со ссылкой на фиг.2, искажения при передаче вырабатываются из-за нелинейностей усилителя. Таким образом, в действительности, сигнальные точки фактически принятого сигнала становятся сигнальными точками, наподобие тех, которые показаны на фиг.4.
Фиг.4 изображает пояснительную схему, показывающую сигнальные точки, каждая из которых находится в положении координат на плоскости IQ и которые служат в качестве сигнальных точек принятого сигнала, завершающего модуляцию, принимающую способ модуляции 32 АФМн тем же самым способом, как на фиг.3. Как показано на фиг.4, каждая сигнальная точка фактически принятого сигнала размещается в положении координат, несовпадающим точно с положением координат соответствующей сигнальной переданного сигнала, показанного на фиг.3. То есть, положение координат каждой сигнальной точки, показанной на фиг.4, рассредоточено.
Помимо этого, как показано на фиг.4, чем больше расстояние между центральной точкой и сигнальной точкой (то есть, чем больше амплитуда), тем выше степень дисперсии положения координат, в котором размещена сигнальная точка.
Для того, чтобы можно было определить, какой из 32 различных типов символов соответствует сигнальной точке такого принятого сигнала, кадр усовершенствованного ШС цифрового широковещания выполнен с сигналом положения переданной сигнальной точки, выраженным с помощью Р, в каждом слоте модуляции, как показано на фиг.1.
Поскольку сигнал положения переданной сигнальной точки представляет собой уже известный сигнал, как описано выше, устройство для приема сигналов позволяет идентифицировать положение координат каждого из символов, имеющих 32 различных типа даже в случае, если существуют искажения при передаче, вызванные нелинейными характеристиками усилителя. То есть, так как устройство для приема сигналов знает, какой из 32 различных типов символов соответствует сигнальной точке сигнала, принятого в качестве сигнала положения переданной сигнальной точки, то можно определить, насколько было сдвинуто положение координат каждой сигнальной точки, соответствующей символу.
Устройство для приема сигналов для усовершенствованного ШС цифрового широковещания обычно идентифицирует положение координат сигнальной точки принятого сигнала. Сигнальная точка соответствует одному из символов сигнала положения переданной сигнальной точки, предусмотренного в каждом из множества слот модуляции, переданных в том же самом режиме передачи. Если 20 слотов были приняты в режиме передачи, принимающем способ модуляции 32 АФМн, например, можно принять 20 сигналов положений переданных сигнальных точек. Таким образом, можно идентифицировать 20 сигнальных точек, соответствующих первому символу. Кроме того, можно идентифицировать 20 сигнальных точек, соответствующих второму символу. И, наконец, можно идентифицировать 20 сигнальных точек, соответствующих 32-му символу. Затем устройство для приема сигналов для усовершенствованного ШС цифрового широковещания вычисляет среднее значение положений координат сигнальных точек, каждая из которых соответствует символу для каждого символа. Таким образом, устройство для приема сигналов идентифицирует опорную точку положений координат каждого из символов, имеющих 32 различных типа.
Фиг.5 изображает пояснительную схему, на которую ссылаются в следующем описании типичного процесса вычисления среднего значения положений координат сигнальных точек сигналов положений переданных сигнальных точек. Фиг.5 изображает пояснительную схему, показывающую сигнальные точки, которые находятся на плоскости IQ и служат в качестве сигнальных точек сигналов положений переданных сигнальных точек переданного сигнала, завершающего модуляцию, принимающую способ модуляции 32 АФМн точно так же, как на фиг.3. Как показано на фиг.5, вычисляют среднее значение положений координат сигнальных точек, соответствующих символу. Таким образом, устройство для приема сигналов идентифицирует опорную точку положения координат каждого из символов, имеющих 32 различных типа.
Затем устройство для приема сигналов сохраняет опорную точку положений координат каждого из символов, имеющих 32 различных типа в качестве информации о положениях опорных сигналов, которая будет использоваться при жестком определении символа и вычислении вероятности.
Фиг.6 изображает блок-схему, показывающую типичную конфигурацию схемы демодуляции, которая используется в устройстве для приема сигналов для усовершенствованного ШС цифрового широковещания. Схема 10 демодуляции выполнена с возможностью использования основных блоков, таких как схема 21 синхронизации несущих, детектор 22 ошибки фазы, жесткий определитель 23, схема 24 усреднения сигнальных точек, таблица 25 положений сигнальных точек, модуль 26 вычисления вероятности и декодер 27 с исправлением ошибок.
Схема 21 синхронизации несущих выполнена как обычная цифровая схема фазовой автоподстройки частоты (ФАПЧ). Схема 21 синхронизации несущих выполняет обработку для синхронизации принятого сигнала с частотой несущей и фазой для того, чтобы минимизировать дисперсии ошибки фазы, обнаруженной детектором 22 ошибки фазы.
На основе синхронизированного детектированного сигнала, который выводится с помощью схемы синхронизации несущих, схема 24 усреднения сигнальных точек вычисляет среднее значение каждой из составляющих I и Q сигнала положения переданной сигнальной точки, полученного из принятого сигнала для каждой сигнальной точки, соответствующей одному из символов, имеющих 32 различных типа для того, чтобы выработать вышеупомянутую информацию о положениях опорных сигнальных точек. Следует отметить, что схема 24 усреднения сигнальных точек принимает только синхронизированный детектированный сигнал для сигнала положения переданной сигнальной точки.
Информация о положениях опорных сигнальных точек, выработанная с помощью схемы 24 усреднения сигнальных точек, вводится в таблицу 25 положений сигнальных точек, которая служит в качестве таблицы, которая используется для хранения соотношений между положениями координат сигнальных точек на плоскости IQ, которая используется для отображения одинаковой двоичной картины и многозначной двоичной картины.
Жесткий определитель 23 вычисляет граничную линию плоскости IQ, когда жесткое определение должно быть сделано на сигнальной точке на основании таблицы 25 положений сигнальных точек, и выполняет обработку с жестким определением на основании граничной линии.
Детектор 22 ошибки фазы находит ошибку фазы между значением жесткого определения, которое выводится с помощью жесткого определителя 23, и синхронизированным детектированным сигналом для того, чтобы обнаружить ошибку фазы.
Блок 26 вычисления вероятности принимает каждую сигнальную точку, показанную с помощью информации о положениях опорных сигнальных точек, которая извлекается из таблицы 25 положений сигнальных точек в качестве идеальной сигнальной точки для вычисления логарифмического отношения правдоподобия (ЛОП) каждого из битов, образующих двоичную картину, которая отображается в сигнальных точках.
Декодер 27 с исправлением ошибок декодирует коды НППЧ на основании ЛОП, выводя при этом данные результата декодирования.
Такая схема 10 демодуляции позволяет выполнить синхронизацию несущей и декодирование с исправлением ошибок, чтобы получить в результате меньшие искажения даже для принятого сигнала с большим сдвигом в распределении амплитуды сигнальной точки и фазы сигнальной точки из-за искажений, вызванных нелинейностями.
Фиг.7 изображает блок-схему, показывающую подробную типичную конфигурацию существующей схемы усреднения сигнальных точек, которая используется в схеме 10 демодуляции, показанной на фиг.6.
Как показано на фиг.7, существующая схема 24 усреднения сигнальных точек выполнена с возможностью использования распределителя 41 сигнальных точек, 1-ой схемы 42-1 усреднения сигнальных точек, 2-ой схемы 42-2 усреднения сигнальных точек, … и 32-ой схемы 42-32 усреднения сигнальных точек, схемы 43 селектора и таблицы 44 известных сигналов.
Следует отметить, что каждое из чисел 1, 2, … и 32, которые включены в 1-ую схему 42-1 усреднения сигнальных точек, 2-ую схему 42-2 усреднения сигнальных точек, … и 32-ую схему 42-32 усреднения сигнальных точек, представляет собой число сигнальных точек, которое используется для идентификации символа, соответствующего сигнальной точке. В этом случае, число N сигнальных точек соответствует символу, представляющему собой двоичную картину, которая отображается в сигнальной точке. В случае сигнала, модулированного с использованием способа 32АФМн, N=1 соответствует "0000", N=2 соответствует "0001", N=3 соответствует "0010", и N=32 соответствует "1111", соответственно.
Таблица 44 известных сигналов последовательно выводит числа сигнальных точек символов в порядке положений символов в информации о положении переданной сигнальной точки обычно на основании сигнала управления тактированием, синхронизированным с границами переданного кадра синхронизированного детектированного сигнала.
Распределитель 41 сигнальных точек распределяет синхронизированные детектированные сигналы схемам усреднения в соответствии с числами сигнальных точек, принятыми из таблицы 44 известных сигналов.
Каждая 1-ая схема 42-1 усреднения сигнальных точек - 32-ая схема 42-32 усреднения сигнальных точек вычисляет среднее значение каждой из составляющих I и Q, включенных в синхронизированные детектированные сигналы, принятые из распределителя 41 сигнальных точек в течение достаточно длительного периода времени.
Схема 43 селектора последовательно выводит средние значения, которые были вычислены для чисел сигнальных точек, путем переключения входа в схеме 43 селектора из любого одного из средних значений на другое среднее значение. Таким образом, схема 43 селектора последовательно выводит части информации о положениях опорных сигнальных точек всех сигнальных точек.
Однако в схеме 10 демодуляции, имеющей конфигурацию, описанную выше, необходимо вычислить среднее значение принятых сигналов для каждой сигнальной точки. Таким образом, число многочисленных значений в модуляции АФМн увеличивается, и чем больше число сигнальных точек, тем больше число схем усреднения сигнальных точек, которые требуются. То есть, число схем усреднения сигнальных точек пропорционально числу сигнальных точек. В результате, возникает проблема в том, что увеличивается размер схемы 10 демодуляции.
Помимо этого, чем больше число сигнальных точек, тем ниже частота, на которой сигнальные точки передаются. То есть, частота, на которой передаются сигнальные точки, обратно пропорциональна числу вышеупомянутых сигнальных точек. Таким образом, в схеме 10 демодуляции возникает проблема, связанная с тем, что время сходимости становится большим. Время сходимости определяется как время, которое необходимо для получения достаточных результатов компенсации искажений, вызванных нелинейностями, путем вычисления среднего значения всех сигнальных точек.
Для того чтобы решить проблемы, описанные выше, согласно настоящему изобретению, количество схем усреднения сигнальных точек перестает увеличиваться даже в случае, если количество сигнальных точек является большим. Помимо этого, настоящее изобретение уменьшает время сходимости, которое определено как время, которое требуется для получения достаточных результатов компенсации искажений, вызванных нелинейностями настолько, насколько это возможно.
Фиг.8 изображает блок-схему, показывающую типичную конфигурацию схемы 24 усреднения сигнальных точек, которая используется в схеме 10 демодуляции, согласно варианту осуществления настоящего изобретения. Типичная конфигурация схемы 24 усреднения сигнальных точек, показанная на фиг.8, обычно представляет собой типичную конфигурацию схемы 24 усреднения сигнальных точек, которая используется в схеме 10 демодуляции, показанной на фиг.6.
Типичная конфигурация схемы 24 усреднения сигнальных точек, показанная на фиг.8, выполнена с возможностью использования фазовращателя 61, распределителя 62 радиусов, 1-ой схемы 63-1 усреднения радиусов, 2-ой схемы 63-2 усреднения радиусов, 3-ей схемы 63-3 усреднения радиусов, схемы 64 селектора, фазовращателя 65, таблицы 66 известных сигналов и инвертора кода.
Таблица 66 известных сигналов, например, последовательно выводит числа радиусов и фаз сигнальных точек, каждая из которых соответствует символу в порядке положений символов в информации о положении переданной сигнальной точки обычно на основании сигнала управления тактированием, синхронизированного с границами переданного кадра синхронизированного детектированного сигнала. В этом случае, число радиуса сигнальной точки, соответствующей символу, равно числу, которое используется для идентификации радиуса, полученного из положения координат сигнальной точки в качестве радиуса, представляющего собой значение амплитуды сигнальной точки. Кроме того, число фазы сигнальной точки, соответствующей символу, равно числу, которое используется для идентификации фазы, полученной из положения координат сигнальной точки в качестве фазы сигнальной точки.
Фиг.9 изображает пояснительную схему чисел радиуса и фазы сигнальной точки. На той же самой фигуре, горизонтальная ось используется в качестве оси I, тогда как вертикальная ось используется в качестве оси Q. Каждая черная круглая точка, показанная на фигуре, представляет собой положение координат сигнальной точки, соответствующей символу в сигнале, модулированному с использованием способа модуляции 32 АФМн.
Как показано на той же самой фигуре, сигнальные точки 32 различных типов можно распределить на три категории сигнальных точек, имеющих радиусы, которые отличаются друг от друга. Следует отметить, что расстояние между сигнальной точкой и центральной точкой с координатами (0, 0) представляет собой значение амплитуды сигнальной точки и называется радиусом сигнальной точки.
То есть, 16 сигнальных точек находятся на окружности круга, имеющего самый большой радиус, представленный расстоянием между окружностью и центральной точкой с координатами (0, 0). Число радиуса этих 16 сигнальных точек устанавливается на 1. Помимо этого, четыре сигнальных точки находятся на окружности круга, имеющего самый маленький радиус, представленный расстоянием между окружностью и центральной точкой с координатами (0, 0). Число радиуса этих четырех сигнальных точек устанавливается на 3. Кроме того, 12 сигнальных точек находятся на окружности круга, имеющего промежуточный радиус, представленный расстоянием между окружностью и центральной точкой с координатами (0, 0). Число радиуса этих 12 сигнальных точек устанавливается на 2. Промежуточный радиус имеет длину между длинами самого длинного и самого короткого радиусов.
Помимо этого, сигнальные точки 32 различных типов можно распределить на 24 группы сигнальных точек, имеющих фазы, которые отличаются друг от друга. Например, предполагается, что сигнальная точка на оси I на правой стороне фигуры имеет фазу 0°. К тому же, 16 сигнальных точек, каждая из которых имеет число 1 радиуса, имеет фазы 0°, 22,5°, 45°, 67,5° и т.д., тогда как 12 сигнальных точек, каждая из которых имеет число 2 радиуса, имеет фазы 15°, 45°, 75° и т.д. Более того, четыре сигнальных точки, каждая из которых имеет число 3 радиуса, имеет фазу 45°, 135° и т.д., соответственно. Таким образом, например, путем назначения числа 1 фазы в фазе 0°, числа 2 фазы в фазе 15°, числа 3 фазы в фазе 22,5°, числа 4 фазы в фазе 45° и т.д., фазы сигнальных точек можно распределить на 24 группы сигнальных точек, которые имеют 24 различных числа фаз, соответственно.
Таким образом, например, сигнальная точка 101 имеет число 1 радиуса и число 4 фазы. К тому же, сигнальная точка 102 имеет число 2 радиуса и число 4 фазы. Далее, сигнальная точка 103 имеет число 3 радиусов и число 4 фазы.
Таблица 66 известных сигналов последовательно выводит такие числа радиусов и такие числа фаз для каждого символа, соответствующего сигнальной точке, которая служит в качестве объекта обработки.
Следует отметить, что хотя допускается в качестве предположения, что числа радиусов и фаз, которые последовательно выводятся из таблицы 66 известных сигналов, представляют собой числа радиусов и фаз, которые сохранены заранее для информации о положении переданных сигнальных точек. При этом, например, можно выводить числа радиусов и фаз сигнальных точек, полученных в результате жесткого принятия решения.
Возвращаясь опять к фиг.8, на основании числа фазы, которое выводится из таблицы 66 известных сигналов в качестве числа фазы, присвоенного сигнальной точке, инвертор 67 кода идентифицирует фазу сигнальной точки и инвертирует код фазы, подавая инвертированный код в фазовращатель 61.
На основании информации, поданной из инвертора 67 кода, фазовращатель 61 поворачивает фазу сигнальной точки, которая служит в качестве объекта обработки. То есть, инвертор 67 кода и фазовращатель 61 выполняют сдвиговую обработку по отношению к составляющей модуляции фазы символа, соответствующего сигнальной точке, которая служит в качестве объекта обработки. Следует отметить, что поскольку символ, полученный из синхронизированного детектированного сигнала принятого сигнала, обычно имеет ошибку фазы, составляющая модуляция фазы никогда не становится равной 0 даже после того, как сдвиговая обработка была выполнена по отношению к составляющей модуляции фазы.
Распределитель 62 радиуса распределяет синхронизированный детектированный сигнал в схеме 63 усреднения радиуса, связанной с числом радиуса, которое выводится из таблицы 66 известных сигналов. То есть, если синхронизированный детектированный сигнал является сигналом для сигнальной точки, имеющей число 1 радиуса, распределитель 62 радиусов подает (распределяет) синхронизированный детектированный сигнал в 1-ую схему 63-1 усреднения радиусов. К тому же, если синхронизированный детектированный сигнал является сигналом для сигнальной точки, имеющей число 2 радиуса, распределитель 62 радиусов подает (распределяет) синхронизированный детектированный сигнал во 2-ую схему 63-2 усреднения радиусов. Таким же образом, если синхронизированный детектированный сигнал является сигналом для сигнальной точки, имеющей число радиусов 3, распределитель 62 радиусов подает (распределяет) синхронизированный детектированный сигнал в 3-ю схему 63-3 усреднения радиусов.
Каждая 1-ая схема 63-1 усреднения радиусов - 3-я схема 63-3 усреднения радиусов вычисляет среднее значение каждой из составляющих I и Q синхронизированного детектированного сигнала, принятого из распределителя 62 радиусов сверх периода времени, определенного заранее.
Как описано выше, в схеме 24 усреднения сигнальных точек, согласно настоящему изобретению, сигнальные точки, для которых сдвиговая обработка была выполнена с помощью инвертора 67 кодов и фазовращателя 61 по отношению к составляющим модуляции фазы символов, усредняются для каждого радиуса. Например, в 1-ой схеме 63-1 усреднения радиусов для всех 16 сигнальных точек различных типов, все из которых имеют число 1 радиуса, выполняют сдвиговую обработку по отношению к составляющим модуляции фазы и вычисляют среднее значение. То есть, в схеме 24 усреднения сигнальных точек, согласно настоящему изобретению, сигнальные точки, имеющие одинаковое число радиусов, подвергаются усредняющей обработке одним одинаковым способом.
Таким образом, результат усреднения, который выводится с помощью 1-ой схемы 63-1 усреднения радиусов, представляет собой результат вычисления среднего значения для каждой из сигнальных точек, имеющих 16 различных типов, и представляет собой сдвиг, выраженный в градусах от фазы 0°. Результат усреднения, который выводится с помощью 1-ой схемы 63-1 усреднения радиусов, представляет собой средний радиус для каждой из сигнальных точек, имеющих 16 различных типов. Следует отметить, что используя средний радиус, например, среднее значение расстояний от центральной точки до сигнальных точек 16-ти различных типов, можно также использовать для определения разности от предполагаемого расстояния, соответствующего числу 1 радиуса.
Кроме того, результат усреднения, который выводится с помощью 2-ой схемы 63-2 усреднения радиусов, представляет собой результат вычисления среднего значения для каждой из сигнальных точек, имеющих 12 различных типов, и представляет собой сдвиг, выраженный в градусах от фазы 0°. Результат усреднения, который выводится с помощью 2-ой схемы 63-2 усреднения радиусов, представляет собой средний радиус для каждой из сигнальных точек, имеющих 12 различных типов. Аналогично, результат усреднения, который выводится с помощью 3-ей схемы 63-3 усреднения радиусов, представляет собой результат вычисления среднего значения для каждой из сигнальных точек, имеющих четыре различных типа, и представляет собой сдвиг, выраженный в градусах от фазы 0°. Результат усреднения, который выводится с помощью 3-ей схемы 63-3 усреднения радиусов, представляет собой средний радиус для каждой из сигнальных точек, имеющих четыре различных типа. Схема 64 селектора последовательно выводит средние значения, которые были вычислены для чисел радиусов, путем переключения входа в схеме 64 селектора из любого одного из средних значений на другое среднее значение.
На основании числа фазы, которое выводится из таблицы 66 известных сигналов в качестве числа фазы сигнальной точки, фазовращатель 65 идентифицирует фазу сигнальной точки, которая служит в качестве объекта обработки, и поворачивает фазу сигнальной точки. Таким образом, составляющую модуляции фазы символа, завершающего сдвиговую обработку, которую выполняют инвертор 67 кода и фазовращатель 61, можно вернуть в свое первоначальное значение.
Таким образом, части информации о положениях опорных сигнальных точек всех сигнальных точек выводят последовательно из фазовращателя 65.
Как описано выше, схема 24 усреднения сигнальных точек, согласно настоящему изобретению, выполнена со схемой 63 усреднения радиусов для каждого радиуса. Таким образом, даже в случае, если схема 24 усреднения сигнальных точек вырабатывает информацию о положениях опорных сигнальных точек сигнальных точек из сигнала модулированного с использованием способа модуляции 32 АФМн, достаточно предусмотреть схему 24 усреднения сигнальных точек с тремя схемами 63 усреднения радиусов, то есть, с 1-ой схемой 63-1 усреднения радиусов - 3-ей схемой 63-3 усреднения радиусов. То есть, согласно настоящему изобретению, число схем 63 усреднения радиусов можно приостановить даже в случае, если число сигнальных точек является большим. Таким образом, можно предотвратить увеличение размера устройства для приема сигналов и стоимости изготовления устройства для приема сигналов.
Помимо этого, как описано выше, в схеме 24 усреднения сигнальных точек, согласно настоящему изобретению, сигнальные точки, имеющие одинаковое число радиусов, подвергаются обработке усреднения одним одинаковым способом. Таким образом, при обработке для вычисления среднего значения каждой из составляющих I и Q синхронизированного детектированного сигнала за единичный интервал времени, можно увеличить численное значение в знаменателе.
То есть, в случае существующей схемы 42 усреднения сигнальных точек, показанной на фиг.7, например, усреднение вычисляют для каждого числа сигнальных точек. Таким образом, для одного числа сигнальной точки накопление выборок занимает достаточно продолжительное время. С другой стороны, в случае схемы 63 усреднения радиусов, которая выполнена с помощью настоящего изобретения и показана на фиг.8, среднее значение вычисляют для каждого радиуса сигнальных точек. Таким образом, например, время, которое требуется для получения информации о положениях опорных сигнальных точек для сигнальной точки 101, показанной на фиг.9, можно уменьшить до 1/16 времени, которое требуется для существующей схемы 42 усреднения сигнальных точек для того, чтобы получить информацию о положениях опорных сигнальных точек. В случае существующей схемы 42 усреднения сигнальных точек, которая используется для вычисления среднего значения 16 выборок для сигнальной точки 101, показанной, например, на фиг.9, необходимо принять 16 частей информации о положениях опорных сигнальных точек. С другой стороны, если используется схема 63 усреднения радиусов, согласно настоящему изобретению, достаточно принять один раз информацию о положениях опорных сигнальных точек.
Кроме того, согласно настоящему изобретению, например, время, которое требуется для получения информации о положениях опорных сигнальных точек для сигнальной точки 102, показанной на фиг.9, можно уменьшить до 1/12 времени, которое требуется для существующей схемы 42 усреднения сигнальных точек для получения информации о положениях опорных сигнальных точек. Аналогично, время, которое требуется для получения информации о положениях опорных сигнальных точек для сигнальной точки 103, показанной на фиг.9, можно уменьшить до 1/4 времени, которое требуется для существующей схемы 42 усреднения сигнальных точек для получения информации о положениях опорных сигнальных точек.
Как описано выше, согласно настоящему изобретению, можно сократить время сходимости, которое определяется как время, которое необходимо для получения достаточных результатов компенсации искажений принятого сигнала, вызванных нелинейностями.
Помимо этого, согласно настоящему изобретению, чем больше расстояние между центральной точкой и сигнальной точкой (чем больше амплитуда сигнальной точки), тем больше величина, на которую можно уменьшить время, которое требуется для получения информации о положениях опорных сигнальных точек. Как описано ранее со ссылкой на фиг.2, по отношению к нелинейным характеристикам усилителя, как для амплитудной характеристики, так и для амплитудно-фазовой характеристики, чем больше амплитуда входного сигнала, тем более заметна степень нелинейности. Таким образом, при обработке для приема сигнала, модулированного путем выбора, например, способа модуляции 32 АФМн, можно предположить, что компенсация искажений принятого сигнала, которая вызвана нелинейностями, должна быть выполнена более предпочтительно на сигнальной точке, имеющей число 1 радиуса.
Как описано выше, согласно настоящему изобретению, чем больше амплитуда сигнальной точки, тем больше величина, на которую можно сократить время, требуемое для получения информации о положениях опорных сигнальных точек. Помимо этого, с другой точки зрения, во время процесса вычисления среднего значения в заданный период времени, чем больше амплитуда сигнальной точки, тем выше точность информации о положениях опорных сигнальных точек относительно сигнальной точки. Таким образом, согласно настоящему изобретению, для обработки для приема сигнала, модулированного с использованием способа модуляции для большого числа сигнальных точек, как и в случае, например, с сигналом, передаваемом при усовершенствованном ШС цифровом широковещании, можно специально реализовать отличную схему демодуляции.
Далее, со ссылкой на алгоритм, показанный на фиг.10, следующее ниже описание объясняет обработку, которую выполняют с помощью схемы 24 усреднения сигнальных точек, показанной на фиг.8, для вывода информации о положениях опорных сигнальных точек.
Алгоритм начинается на этапе S21, на котором на основании числа фазы, которое выводят из таблицы 66 известных сигналов в виде числа фаза, присвоенного сигнальной точке, инвертор 67 кодов идентифицирует фазу сигнальной точки. Помимо этого, инвертор 67 кода также инвертирует код фазы.
Затем, на следующем этапе S22, на основании информации, принятой из инвертора 67 кода в качестве результата процесса, выполненного на этапе S21, фазовращатель 61 поворачивает фазу сигнальной точки, которая служит в качестве объекта обработки. Таким образом, можно выполнить процесс сдвига по отношению к составляющей фазовой модуляции символа, соответствующего сигнальной точке, которая служит в качестве объекта обработки.
После этого, на следующем этапе S23 распределитель 62 радиусов распределяет синхронизированный детектированный сигнал в схеме 63 усреднения радиусов, выполненный для сигнала в соответствии с числом радиусов, выводимым из таблицы 66 известных сигналов.
Затем, на следующем этапе S24, каждая 1-ая схема 63-1 усреднения радиусов - 3-я схема 63-3 усреднения радиусов вычисляет среднее значение каждой из составляющих I и Q синхронизированного детектированного сигнала, принятого из распределителя 62 радиусов в течение периода времени, определенного заранее.
Далее, на следующем этапе S25, схема 64 селектора последовательно выводит средние значения, которые были вычислены для чисел радиусов с помощью переключения из любого одного из средних значений на другое среднее значение.
Затем, на следующем этапе S26, на основании числа фазы, выведенного из таблицы 66 известных сигналов в виде числа фазы, присвоенного сигнальной точке, фазовращатель 65 идентифицирует фазу сигнальной точки. Помимо этого, фазовращатель 65 также поворачивает фазу сигнальной точки, которая служит в качестве объекта обработки. Таким образом, восстанавливают в свое первоначальное значение составляющую модуляции фазы символа, которая подвергалась сдвиговой обработке, выполненной на этапе S22.
Далее, на следующем этапе S27 выводят информацию о положениях опорных сигнальных точек.
Обработку для вывода информации о положениях опорных сигнальных точек выполняют, как описано выше.
В соответствии с вышеприведенным описанием, положения сигнальных точек сигнала, модулированного с использованием способа модуляции АФМн, выводят обычно для образования круга. Однако положения выводят не только для образования круга, но также формы прямоугольного типа (то есть, квадратурная амплитудная модуляция (КАМ)), треугольного типа, шестиугольного типа, типа звезды или другого типа. То есть, настоящее изобретение можно применить к любой произвольной конфигурации до тех пор, пока в этой конфигурации положение сигнальных точек не образует множества сигнальных точек, имеющих одинаковый радиус.
Помимо этого, в соответствии с вышеприведенным описанием, для того, чтобы получить информацию о положениях опорных сигнальных точек, предусмотрена типичная конфигурация, в которой среднее значение сигнальных точек вычисляется для каждого радиуса. Однако также можно выполнить другую типичную конфигурацию, в которой для сигнальных точек, имеющих, например, различные радиусы, используются параметры управления, изменяющиеся в соответствии с радиусом, для выполнения синхронизации и адаптивной компенсации.
В качестве примера, для каждого радиуса коэффициент обратной связи цифровой схемы ФАПЧ переключается на другое значение, определяемое радиусом. В качестве другого примера, для каждого радиуса, размер шага отвода, выполняющего коррекцию в адаптивном компенсаторе, переключается на другое значение, определенное с помощью радиуса. В зависимости от искажения при передаче, такого как искажение, которое вырабатывается из-за нелинейностей усилителя в сигнале, модулированном с использованием способа модуляции АФМн, частота появления ошибок определения жесткого определителя, который используется при обнаружении ошибки фазы и обнаружении ошибки компенсации, предполагается переменной от радиуса к радиусу. Таким образом, путем переключения параметра управления для каждого радиуса, как описано выше, ошибки управления при синхронизации несущей и адаптивной компенсации можно минимизировать с возможностью дополнительного улучшения эффективности приема сигнала.
Фиг.11 изображает блок-схему, показывающую типичную конфигурацию устройства 130 декодирования принятого сигнала, согласно другому варианту осуществления настоящего изобретения.
Как показано на фигуре, устройство 130 декодирования принятого сигнала использует адаптивный компенсатор 131, схему 132 синхронизации несущих и декодер 133 коррекции ошибок. Помимо этого, устройство 130 декодирования принятого сигнала также имеет детектор 134 ошибки фазы, жесткий определитель 135, детектор 136 ошибки компенсации, фазовращатель 137 и блок 138 управления коэффициентом усиления отвода. Кроме этого, устройство 130 декодирования принятого сигнала также включает в себя таблицу 139 размера шага, схему 140 селектора, таблицу 141 коэффициентов обратной связи и схему 142 селектора.
Адаптивный компенсатор 131 обычно выполнен в виде адаптивного компенсатора, имеющего вид обычного трансверсального фильтра. Адаптивный компенсатор 131 компенсирует у принятого сигнала искажения при передаче, вызванные многолучевой линией связи или т.п. То есть, адаптивный компенсатор 131 компенсирует в принятом сигнале ошибки компенсации, которые обнаруживают с помощью детектора 136 ошибок компенсации.
Адаптивный компенсатор 131 компенсирует искажения, возникающие при передаче, посредством выполнения фильтровой обработки согласно коэффициенту усиления отвода, принятому из блока 138 управления коэффициентом усиления отвода. Блок 138 управления коэффициентом усиления отвода управляет коэффициентом усиления отвода на основании размера шага, восстановленного из таблицы 139 размеров шага посредством схемы 140 селектора и на основании ошибок компенсации, которые подаются в нее с помощью детектора ошибок компенсации посредством фазовращателя 137.
Схема 132 синхронизации несущих вырабатывает несущие, имеющие фазу, синхронизированную с фазой несущих, которые используются при модуляции, выполняемой на стороне передачи сигнала, и выполняет обнаружение с использованием выработанных несущих для того, чтобы демодулировать принятый сигнал.
Схема 132 синхронизации несущих выполнена с возможностью использования фильтра в цепи обратной связи, имеющего внутреннюю цифровую схему ФАПЧ. Фильтр в цепи обратной связи компенсирует ошибку фазы у входного сигнала на основании обнаруженного значения, которое выводится с помощью детектора 134 ошибок фазы в виде значения ошибки фазы. Частоту полосы частот фильтра в цепи обратной связи определяют на основании коэффициента усиления обратной связи, восстановленного из таблицы 141 коэффициентов усиления обратной связи посредством схемы 142 селектора.
Жесткий определитель 135 создает жесткое определение по отношению к синхронизированному детектированному сигналу для идентификации символа, соответствующего сигнальной точке, и выводит число радиусов, которое используется для идентификации радиуса сигнальной точки.
Детектор 134 ошибок фазы обнаруживает фазовую ошибку из синхронизированного детектированного сигнала на основании информации о символе, идентифицированного с помощью жесткого определителя 135, в виде символа, соответствующего сигнальной точке, и возвращает обратно фазовую ошибку в схему 132 синхронизации несущих.
Детектор 136 ошибки компенсации обнаруживает ошибку компенсации синхронизированного детектированного сигнала на основании информации о символе, идентифицированном с помощью жесткого определителя 135, в виде символа, соответствующего сигнальной точке.
Фазовращатель 137 поворачивает фазу ошибки компенсации, которая выводится с помощью детектора 136 ошибки компенсации на основании значения с инвертированной полярностью величины коррекции фазы, которая выводится с помощью схемы 132 синхронизации несущих. Таким образом, ошибка компенсации, так называемая основная полоса, преобразовывается в ошибку компенсации полосы частот канала.
Таблица 139 размеров шага используется для предварительного сохранения размеров шага, характерных для чисел радиусов сигнальных точек. В этой типичной конфигурации таблица 139 размеров шага используется для предварительного сохранения трех различных размеров шага, характерных для, соответственно, трех чисел радиусов сигнальных точек сигнала, модулированного с использованием способа модуляции 32 АФМн. Чтобы быть более конкретным, таблица 139 размеров шага используется для предварительного сохранения размера шага m_r1, m_r1, характерного для числа 1 радиуса, размер шага m_r2, характерного для числа 2 радиуса, и размер шага m_r3, характерного для числа 3 радиуса.
На основании числа радиуса, который выводится из жесткого определителя 135, схема 140 селектора выбирает размер шага, согласно числу радиуса среди размеров шагов, восстановленных из таблицы 139 размеров шага, и подает выбранный размер шага в блок 138 управления коэффициентом усиления отвода.
Таблица 141 коэффициента усиления обратной связи используется для предварительного сохранения коэффициентов усиления обратной связи, характерных для чисел радиусов сигнальных точках. В этой типичной конфигурации, таблица 141 коэффициентов усиления обратной связи используется для предварительного сохранения трех различных коэффициентов обратной связи, характерных, соответственно, для трех чисел радиусов сигнальных точек сигнала, модулированного с использованием способа модуляции 32 АФМн. Более конкретно, таблица 141 коэффициентов усиления обратной связи используется для предварительного сохранения размера шага g_r1, характерного для числа 1 радиуса, размера шага g_r2, характерного для числа 2 радиуса, и размера шага g_r3, характерного для числа 3 радиуса.
На основании числа радиуса, которое выводится из жесткого определителя 135, схема 142 селектора выбирает коэффициент усиления обратной связи, согласно числу радиусов среди коэффициентов усиления обратной связи, восстановленных из таблицы 141 коэффициентов усиления обратной связи, и подает выбранный коэффициент усиления обратной связи в фильтр обратной связи, который используется в схеме 132 синхронизации несущих.
Декодер 133 коррекции ошибок получает данные символов принятого сигнала на основании синхронизированного детектированного сигнала, принятого из схемы 132 синхронизации несущих, и выполняет обработку с коррекцией ошибок по отношению к данным для того, чтобы декодировать данные принятого сигнала.
Как описано выше, используя устройство 130 декодирования принятого сигнала, можно минимизировать ошибки управления при синхронизации несущих и адаптивной компенсации, и, следовательно, дополнительно улучшить эффективность приема сигналов.
Например, в общем известно, что фильтр в цепи обратной связи имеет характеристики, описанные ниже. В случае если фильтр в цепи обратной связи имеет широкую полосу частот, характеристика, которую проявляет фильтр в цепи обратной связи, которая отслеживает изменения фазовых ошибок, улучшается, но число флуктуации, синхронизированного детектированного сигнала, который выводится с помощью схемы ФАПЧ, становится большим. С другой стороны, в случае если фильтр в цепи обратной связи имеет узкую полосу частот, характеристика, которую проявляет фильтр в цепи обратной связи, которая отслеживает изменения фазовых ошибок, становится плохой, но число флуктуации синхронизированного детектированного сигнала является маленьким. В зависимости от искажения при передаче, например, такого, которое вырабатывается из-за нелинейностей усилителя в сигнале, модулированного с использованием способа модуляции АФМн, частота появления ошибок определения жесткого определителя, который используется при обнаружении фазовых ошибок и обнаружении ошибок компенсации, предположительно будет изменяться от радиуса к радиусу. Таким образом, например, желательно изменять также величины, такие как коэффициент усиления обратной связи фильтра в цепи обратной связи для каждого радиуса.
В типичной конфигурации устройства 130 декодирования принятого сигнала, описанного выше со ссылкой на фиг.11, характерные размеры шага и характерный коэффициент усиления обратной связи сохраняются заранее в таблице 139 размеров шага и таблице 141 коэффициентов усиления обратной связи, соответственно, для каждого радиуса. После того как жесткий определитель 135 идентифицировал число радиусов, таблица 139 размера шага и таблица 141 коэффициентов усиления обратной связи осуществляют поиск, соответственно, размера шага и коэффициента усиления обратной связи, которые являются характерными для числа радиуса.
Следует понимать, что ряд обработок, описанных ранее, можно выполнить с помощью аппаратных средств и программных средств. Если ряд процессов, описанных выше, выполняют с использованием программных средств, то программы, составляющие программные средства, можно установить на компьютер, встроенный в выделенные аппаратные средства обычно, из сети или с носителя записи. К тому же, персональный компьютер 700 общего назначения, например, показанный на фиг.12, можно инсталлировать из сети или с носителя записи для того, чтобы он мог выполнять множество функций путем установки множества программ на персональный компьютер.
На фиг.12 центральное процессорное устройство (ЦПУ) 701 выполняет различные виды обработки с использованием программ, которые хранятся в постоянном запоминающем устройстве (ПЗУ) 702, или программ, загруженных из запоминающего блока 708 в оперативное запоминающее устройство (ОЗУ) 703. ОЗУ 703 также используется для правильного хранения различных видов информации, такой как данные, которые требуются для ЦПУ 701 при выполнении обработки.
ЦПУ 701, ПЗУ 702 и ОЗУ 703 подсоединены друг к другу с помощью шины 704, которая также подсоединена к входному/выходному интерфейсу 705.
Входной/выходной интерфейс 705 также подсоединен к входному блоку 706 и выходному блоку 707. Входной блок 706 включает в себя клавиатуру и мышь, тогда как выходной блок 707 включает в себя устройство отображения, такое как устройство на основе жидкокристаллического устройства отображения (LCD) и громкоговоритель. Входной/выходной интерфейс 705 также подсоединен к запоминающему блоку 708 и 709 связи. Запоминающий блок 708 выполнен так, что он может включать в себя жесткий диск. Блок 709 связи выполнен с возможностью использования модема и карты сетевого интерфейса, такой как карта локальной вычислительной сети (ЛВС). Блок 709 связи представляет собой устройство, предназначенное для выполнения обработки с поддержанием связи с другим устройством через сеть, которая включает в себя Интернет.
При необходимости входной/выходной интерфейс 705 также подсоединяется к приводу 710, на котором устанавливается съемный носитель 711 записи. Съемный носитель 711 записи может быть магнитным диском, оптическим диском, магнитооптическим диском или полупроводниковой памятью. Затем, компьютерную программу, которую считывают со съемного носителя записи, инсталлируют при необходимости в запоминающий блок 708.
Как объяснено ранее, если ряд обработок, описанных выше, выполняют с использованием программных средств, программ, составляющих программные средства, можно инсталлировать обычно из сети, такой как Интернет, или носителя записи, такого как съемный носитель 711 записи. Следует отметить, что вышеупомянутый носитель записи представляет собой съемный носитель 711 записи, который предоставляется пользователю отдельно от основного устройства персонального компьютера 700 общего назначения, как показано на фиг.12. Обычные примеры съемного носителя 711 записи включают в себя магнитный диск (включающий в себя гибкий диск (зарегистрированный торговый знак)), оптический диск (включающий в себя CD-ROM (компакт диск, предназначенный только для чтения) или DVD (универсальный цифровой диск)), магнитооптический диск (MD) (мини диск) (зарегистрированный торговый знак)), а также полупроводниковую память. Вместо установки программ со съемных носителей 711 записи, программы можно также сохранить заранее во встроенном носителе записи, включенном в основное устройство персонального компьютера 700 общего назначения, который будет поставляться пользователю. Типичными примерами встроенного носителя записи являются жесткий диск, включенный в запоминающий блок 708 и ПЗУ 702.
Нелишне отметить, что в этом описании изобретения, этапы алгоритма, описанные выше, конечно, можно выполнить в предварительно установленном порядке вдоль оси времени. Однако этапы можно выполнить не только в предварительно установленном порядке вдоль оси времени, но также одновременно или по отдельности.
Помимо этого, специалистам в данной области техники следует понимать, что может иметь место множество модификаций, комбинаций, подкомбинаций и изменений в зависимости от требований к конструкции или от других факторов настолько, насколько они находятся в пределах масштаба прилагаемой формулы изобретения или ее эквивалентов.
Настоящее изобретение содержит предмет изобретения, который относится к раскрытой в японской приоритетной заявке на патент JP 2010-205427, поданной в Японское патентный бюро 14 сентября 2010 года, полное содержание которой включено здесь в качестве ссылки. Специалистам в данной области технике следует понимать, что различные модификации, комбинации, подкомбинации и изменения могут иметь место в зависимости от требований к конструкции и других факторов настолько, насколько они находятся в пределах масштаба прилагаемой формулы изобретения или ее эквивалентов.







Изобретение относится к устройству и способу для приема сигналов. Технический результат состоит в возможности вычисления среднего значения принятых сигналов для каждой сигнальной точки. Для этого устройство имеет: блок идентификации радиуса, выполненный с возможностью идентификации радиуса, представляющего собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции АФМн (амплитудно-фазовой манипуляции); и блок вывода параметров, выполненный с возможностью вывода параметра управления, который относится к демодуляции или к процессу декодирования принятого сигнала на основании идентифицированного радиуса. 6 н. и 8 з.п. ф-лы, 12 ил.
1. Устройство для приема сигналов, содержащее:
блок идентификации радиуса, выполненный с возможностью идентификации радиуса, представляющего собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции на основе амплитудно-фазовой манипуляции;
блок вывода параметров, выполненный с возможностью вывода параметра управления, который относится к процессу демодуляции упомянутого принятого сигнала; и
блок усреднения, выполненный с возможностью вычисления для каждого радиуса, идентифицированного блоком идентификации радиуса, усредненной сигнальной точки из множества сигнальных точек различных типов символов, имеющих одинаковые радиусы, идентифицированные блоком идентификации радиуса, в котором
блок вывода параметров, выполнен с возможностью вывода параметра управления на основании вычисленной усредненной сигнальной точки.
2. Устройство для приема сигналов по п.1, в котором упомянутый блок идентификации радиуса идентифицирует упомянутый радиус с помощью вывода информации, представляющей собой упомянутый радиус сигнальной точки зоны, включающей в себя модулированный известный символ в кадре, составляющем упомянутый принятый сигнал.
3. Устройство для приема сигналов по п.2, в котором принятый сигнал представляет собой широковещательный сигнал, усовершенствованного широкополосного спутникового цифрового широковещания, и упомянутая зона, включающая в себя модулированный известный символ, представляет собой зону, включающую в себя модулированный сигнал положения переданной сигнальной точки.
4. Устройство для приема сигналов по п.3, в котором упомянутый блок идентификации радиуса предварительно сохраняет радиус и фазу на плоскости IQ для каждого из символов упомянутого моделированного сигнала положения переданной сигнальной точки и выводит информацию, которая используется для идентификации упомянутого радиуса упомянутого символа, а также упомянутой фазы упомянутого символа в порядке положений упомянутых символов упомянутого модулированного сигнала положения переданной сигнальной точки синхронно с упомянутым принятым сигналом.
5. Устройство для приема сигналов по п.3, причем упомянутое устройство для приема сигналов дополнительно содержит:
блок сдвига фазовой составляющей, выполненный с возможностью выполнения сдвиговой обработки на упомянутой фазовой составляющей каждой сигнальной точки упомянутого принятого сигнала; и
блок усреднения, выполненный с возможностью вычисления среднего значения каждой из составляющих I и Q, включенных в множество сигнальных точек, которые принимают упомянутый идентифицированный радиус в качестве общего радиуса и имеют фазовые составляющие, которые уже подвержены упомянутой сдвиговой обработке, для каждого радиуса, в которой,
для упомянутых составляющих I и Q, включенных в сигнальную точку в качестве составляющих, каждая из которых усредняется с помощью упомянутого блока усреднения, блок вывода параметров вырабатывает информацию о положениях опорных сигнальных точек, которая будет использоваться в качестве опорного сигнала при определении символа упомянутого принятого сигнала и вычислении вероятности на основании упомянутых составляющих I и Q сигнальной точки, полученной путем восстановления упомянутой фазовой составляющей, уже подверженной упомянутой сдвиговой обработке, до своего первоначального значения, и выводит упомянутую информацию о положениях опорных сигнальных точек в качестве упомянутого параметра управления.
6. Устройство для приема сигналов, содержащее:
блок идентификации радиуса, выполненный с возможностью идентификации радиуса, представляющего собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции на основе амплитудно-фазовой манипуляции; и
блок вывода параметров, выполненный с возможностью вывода параметра управления, который относится к процессу декодирования упомянутого принятого сигнала на основании упомянутого идентифицированного радиуса; и
блок усреднения, выполненный с возможностью вычисления для каждого радиуса, идентифицированного блоком идентификации радиуса, усредненной сигнальной точки из множества сигнальных точек различных типов символов, имеющих одинаковые радиусы, идентифицированные блоком идентификации радиуса, в котором
блок вывода параметров выполнен с возможностью вывода параметра управления на основании вычисленной усредненной сигнальной точки.
7. Устройство для приема сигналов по п.6, в котором упомянутый блок идентификации радиуса идентифицирует упомянутый радиус с помощью вывода информации, представляющей собой упомянутый радиус сигнальной точки зоны, включающей в себя модулированный известный символ в кадре, составляющем упомянутый принятый сигнал.
8. Устройство для приема сигналов по п.7, в котором упомянутый принятый сигнал представляет собой широковещательный сигнал, усовершенствованного широкополосного спутникового цифрового широковещания, и упомянутая зона, включающая в себя модулированный известный символ, представляет собой зону, включающую в себя модулированный сигнал положения переданной сигнальной точки.
9. Устройство для приема сигналов по п.8, в котором упомянутый блок идентификации радиуса предварительно сохраняет радиус и фазу на плоскости IQ для каждого из символов упомянутого модулированного сигнала положения переданной сигнальной точки и выводит информацию, которая используется для идентификации упомянутого радиуса упомянутого символа, а также упомянутой фазы упомянутого символа в порядке положений упомянутых символов упомянутого моделированного сигнала положения переданной сигнальной точки синхронно с упомянутым принятым сигналом.
10. Устройство для приема сигналов по п.8, в котором устройство для приема сигналов дополнительно содержит:
блок сдвига фазовой составляющей, выполненный с возможностью сдвиговой обработки на упомянутой фазовой составляющей каждой сигнальной точки упомянутого принятого сигнала; и
блок усреднения, выполненный с возможностью вычисления среднего значения каждой из составляющих I и Q, включенных в множество сигнальных точек, которые принимают упомянутый идентифицированный радиус в качестве общего радиуса и имеют фазовые составляющие, уже подверженные упомянутой сдвиговой обработке, для каждого радиуса, в которой,
для упомянутых составляющих I и Q, включенных в сигнальную точку в качестве составляющих, каждая из которых усредняется с помощью упомянутого блока усреднения, упомянутый блок вывода параметров вырабатывает информацию о положениях опорных сигнальных точек, которая будет использоваться в качестве опорного сигнала при определении символа упомянутого принятого сигнала и вычислении вероятности на основании упомянутых составляющих I и Q сигнальной точки, полученной с помощью восстановления упомянутой фазовой составляющей, уже подверженной упомянутой сдвиговой обработке, до своего первоначального значения, и выводит упомянутую информацию о положениях опорных сигнальных точек в качестве упомянутого параметра управления.
11. Способ для приема сигналов, содержащий:
этап идентификации радиуса, на котором идентифицируют радиус, представляющий собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции на основе амплитудно-фазовой манипуляции;
этап вывода параметров, на котором выводят параметр управления, который относится к процессу демодуляции упомянутого принятого сигнала на основании упомянутого идентифицированного радиуса; и
этап вычисления для каждого радиуса, идентифицированного на этапе идентификации радиуса, усредненной сигнальной точки из множества сигнальных точек различных типов символов, имеющих одинаковые радиусы, идентифицированные на этапе идентификации радиуса, в котором
на этапе вывода параметров осуществляют вывод параметра управления на основании вычисленной усредненной сигнальной точки.
12. Способ для приема сигналов, содержащий:
этап идентификации радиуса, на котором идентифицируют радиус, представляющий собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции на основе амплитудно-фазовой манипуляции; и
этап вывода параметров, на котором выводят параметр управления, который относится к процессу декодирования упомянутого принятого сигнала на основании упомянутого идентифицированного радиуса; и
этап вычисления для каждого радиуса, идентифицированного на этапе идентификации радиуса, усредненной сигнальной точки из множества сигнальных точек различных типов символов, имеющих одинаковые радиусы, идентифицированные на этапе идентификации радиуса, в котором
на этапе вывода параметров осуществляют вывод параметра управления на основании вычисленной усредненной сигнальной точки.
13. Носитель записи, содержащий записанную на нем программу для приема сигналов, которая будет выполняться с помощью компьютера для выполнения функций устройства для приема сигналов, содержащая:
этап идентификации радиуса, на котором идентифицируется радиус, представляющий собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции на основе амплитудно-фазовой манипуляции; и
этап вывода параметров, на котором выводят параметр управления, который относится к процессу демодуляции упомянутого принятого сигнала на основании упомянутого идентифицированного радиуса; и
этап вычисления для каждого радиуса, идентифицированного на этапе идентификации радиуса, усредненной сигнальной точки из множества сигнальных точек различных типов символов, имеющих одинаковые радиусы, идентифицированные на этапе идентификации радиуса, в котором
на этапе вывода параметров осуществляют вывод параметра управления на основании вычисленной усредненной сигнальной точки.
14. Носитель записи, содержащий записанную на нем программу для приема сигналов, которая будет выполняться с помощью компьютера для того, чтобы выполнять функции устройства для приема сигналов, содержащая:
этап идентификации радиуса, на котором идентифицируют радиус, представляющий собой расстояние от начала координат на плоскости IQ сигнальных точек, каждая из которых соответствует символу, полученному из принятого сигнала, модулированного с использованием способа модуляции на основе амплитудно-фазовой манипуляции; и
этап вывода параметров, на котором выводят параметр управления, который относится к процессу декодирования упомянутого принятого сигнала на основании упомянутого идентифицированного радиуса; и
этап вычисления для каждого радиуса, идентифицированного на этапе идентификации радиуса, усредненной сигнальной точки из множества сигнальных точек различных типов символов, имеющих одинаковые радиусы, идентифицированные на этапе идентификации радиуса, в котором
на этапе вывода параметров осуществляют вывод параметра управления на основании вычисленной усредненной сигнальной точки.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ И УСТРОЙСТВО РАСПОЗНАВАНИЯ КЛАССОВ СИГНАЛОВ | 1998 |
|
RU2133501C1 |
| УСТРОЙСТВО РАДИОПЕРЕДАТЧИКА, УСТРОЙСТВО РАДИОПРИЕМНИКА И СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ | 2005 |
|
RU2394379C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| УСТРОЙСТВО РАДИОПЕРЕДАТЧИКА, УСТРОЙСТВО РАДИОПРИЕМНИКА И СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ | 2005 |
|
RU2394379C2 |

