ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к весоизмерительным устройствам для измерения веса тела живого организма и, в частности, к весоизмерительному устройству, способному исключать измерение 0 кг (измерение исходного состояния, в котором пользователь не стоит на измерителе) с использованием многократного измерения.
УРОВЕНЬ ТЕХНИКИ
Ранее предлагались различные весоизмерительные устройства для измерения веса живого организма. Предложенное устройство для измерения веса содержит устройство, в котором функция весов обеспечена в измерителе состава тела, в котором устройство для измерения веса домашнего животного обеспечено как устройство, задающее опорное значение посредством предварительной калибровки (смотри патентный документ 1). Упомянутая автоматическая весоизмерительная система для домашних животных использует, по описанию, опорное значение, полученное предварительной калибровкой с использованием микрометрического винта предварительно заданного веса.
Состояние 0 кг, которое становится опорным значением, изменяется в зависимости от места установки, наклона и т.п. весоизмерительного устройства. Вышеописанная автоматическая весоизмерительная система для домашних животных получает опорное значение посредством предварительной калибровки и, следовательно, содержит погрешность, вызываемую окружающей средой в месте установки после поставки с предприятия-изготовителя.
Измерение 0 кг обычно выполняют перед началом измерения веса, чтобы обеспечить точность весоизмерительного устройства. Однако в данном случае измерение занимает время, и измерение невозможно начать сразу же. Следовательно, возникает проблема затраты времени на каждое измерение.
Патентный документ 1: находящаяся на рассмотрении заявка на патент Японии № 2007-330200
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЦЕЛИ ИЗОБРЕТЕНИЯ
С учетом вышеизложенного целью настоящего изобретения является точное распознавание состояния 0 кг и сокращение времени, необходимого для измерения веса.
СРЕДСТВА ДОСТИЖЕНИЯ ЦЕЛИ
Настоящее изобретение относится к весоизмерительному устройству, содержащему весоизмерительное средство для измерения веса, или способу измерения веса, при этом весоизмерительное устройство или способ измерения веса содержат средство измерения исходного значения для выполнения измерения выходного значения весоизмерительного средства в исходном состоянии, в котором не стоит объект измерения; запоминающее средство для хранения множества измеренных исходных значений; средство формирования исходного опорного значения для формирования исходного опорного значения, когда изменение множества исходных значений находится в пределах предварительно заданного диапазона; и средство применения исходного опорного значения для измерения с использованием исходного опорного значения при измерении веса объекта измерения весоизмерительным средством; причем средство формирования исходного опорного значения сохраняет сформированное исходное опорное значение в запоминающем средстве; и средство применения исходного опорного значения имеет конфигурацию, пригодную для измерения веса объекта измерения с использованием исходного опорного значения, когда исходное опорное значение хранится в запоминающем средстве, и содержит измерительное средство применения исходного значения для измерения веса объекта измерения с использованием исходного значения, измеренного средством измерения исходного значения, когда исходное опорное значение не хранится в запоминающем средстве.
Исходное значение может быть выходным значением исходного весоизмерительного средства.
Точное измерение веса можно выполнить за короткое время.
Кроме того, в соответствии с одним аспектом настоящего изобретения, средство формирования исходного опорного значения сохраняет сформированное исходное опорное значение в запоминающем средстве; и средство применения исходного опорного значения имеет конфигурацию, пригодную для измерения веса объекта измерения с использованием исходного опорного значения, если исходное опорное значение хранится в запоминающем средстве, и содержит измерительное средство применения исходного значения для измерения веса объекта измерения с использованием исходного значения, измеренного средством измерения исходного значения, когда исходное опорное значение не хранится в запоминающем средстве.
Исходное значение измеряется каждый раз, и точное измерение веса с использованием соответствующего исходного значения выполняется, пока не сформировано исходное опорное значение, и после того как сформировано исходное опорное значение, измерение веса точно выполняется в кратчайший срок с использованием исходного опорного значения.
В соответствии с другим аспектом, в настоящем изобретении дополнительно обеспечено средство определения необходимости коррекции для определения необходимости коррекции исходного опорного значения и средство прекращения применения исходного опорного значения для прекращения применения исходного опорного значения, хранящегося в запоминающем средстве, при определении средством определения необходимости коррекции, что коррекция необходима.
Средство прекращения применения исходного опорного значения содержит в конфигурации соответствующее средство, например средство для стирания исходного опорного значения, хранящегося в запоминающем средстве, средство для изменения порядка работы, чтобы выполнять процедуру без использования исходного опорного значения, хранящегося в запоминающем средстве, и т.п.
В соответствии с данным аспектом, исходное опорное значение можно надежно корректировать, когда коррекция исходного опорного значения необходима.
В соответствии с другим аспектом настоящего изобретения, запоминающее средство имеет конфигурацию, пригодную для сохранения выходного значения весоизмерительного средства после каждого измерения веса, в качестве измеренного значения; и средство определения необходимости коррекции имеет конфигурацию, пригодную для определения исходного значения перед началом измерения веса и для сравнения исходного значения и самого последнего измеренного значения, считанного из запоминающего средства, чтобы определять, что коррекция необходима, когда имеет место предварительно заданное изменение, и определять, что коррекция не обязательна в ином случае.
Предварительно заданное изменение можно задать как соответствующее изменение, например изменение значения деформации, большее чем или равное постоянной величине.
В соответствии с данным аспектом, исходное опорное значение можно корректировать, если состояние весоизмерительного средства изменяется после предыдущего измерения. Поэтому можно не допускать постоянного использования прежнего исходного опорного значения, даже когда изменяется ситуация.
В настоящем изобретении обеспечено средство отсчета времени для измерения истекшего времени; при этом средство определения необходимости коррекции имеет конфигурацию, пригодную для определения, что коррекция необходима, когда со времени формирования исходного опорного значения средством формирования исходного опорного значения истекло предварительно заданное время, и определения, что коррекция не обязательна в ином случае.
Следовательно, исходное опорное значение может быть корректировано через каждое предварительно заданное время, и всегда может быть получено самое последнее исходное опорное значение. Таким образом, даже если исходное состояние весоизмерительного средства изменяется вследствие изменения с годами или подобным образом, исходное опорное значение может быть скорректировано до исходного опорного значения, соответствующего данному изменению.
В соответствии с другим дополнительным аспектом настоящего изобретения, средство определения необходимости коррекции имеет конфигурацию, пригодную для определения, что коррекция необходима, когда имеет место колебание выходного значения весоизмерительного средства, когда измерение веса объекта измерения не выполняется, и определения, что коррекция не обязательна в ином случае.
Следовательно, можно определять выходной сигнал весоизмерительного средства при действии других факторов, кроме измерения веса, например перемещения и вибрации, и можно корректировать исходное опорное значение.
В соответствии с другим дополнительным аспектом настоящего изобретения, дополнительно обеспечено средство определения ускорения для определения изменения ускорения при перемещении или вибрации; при этом средство определения необходимости коррекции имеет конфигурацию, пригодную для определения, что коррекция необходима, когда средством определения ускорения обнаруживается изменение ускорения, и определения, что коррекция не обязательна в ином случае.
Следовательно, можно определять изменение окружающей среды, которое влияет на точность измерения, например перемещение и вибрацию, и можно корректировать исходное опорное значение.
В соответствии с другим дополнительным аспектом настоящего изобретения, дополнительно обеспечено средство отображения для отображения, измерен ли вес с использованием исходного значения, измеренного средством измерения исходного значения, или измерен ли вес с использованием исходного опорного значения, хранящегося в запоминающем средстве.
Следовательно, можно проверять, использовано ли исходное значение, измеренное непосредственно перед измерением веса, или исходное опорное значение, хранящееся в запоминающем средстве.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ
В соответствии с настоящим изобретением, можно точно распознавать состояние 0 кг и можно сократить время, необходимое для измерения веса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
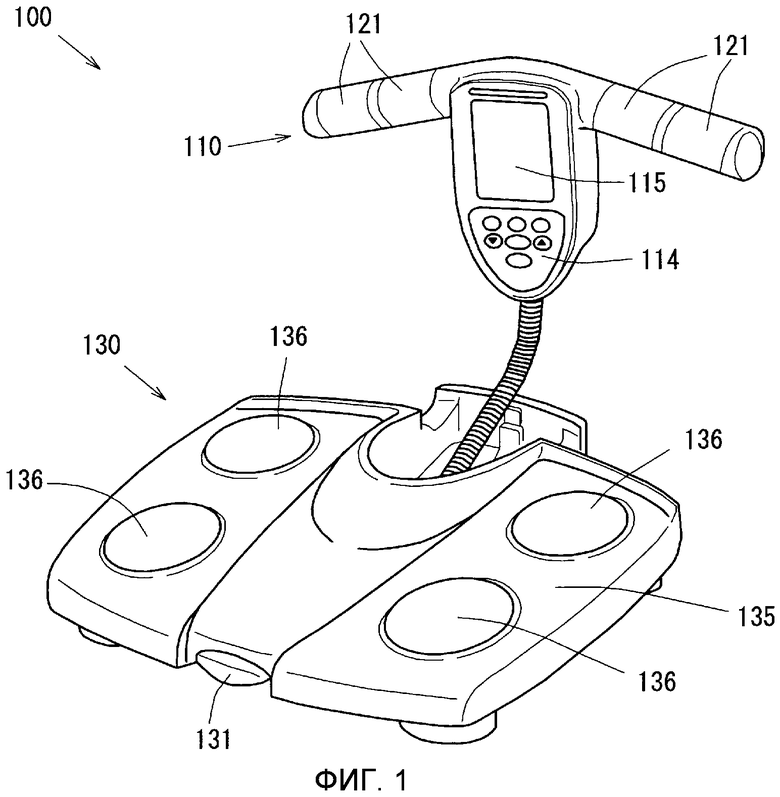
Фиг.1 - внешний вид в перспективе измерителя состава тела.
Фиг.2 - блок-схема конфигурации измерителя состава тела и сервера.
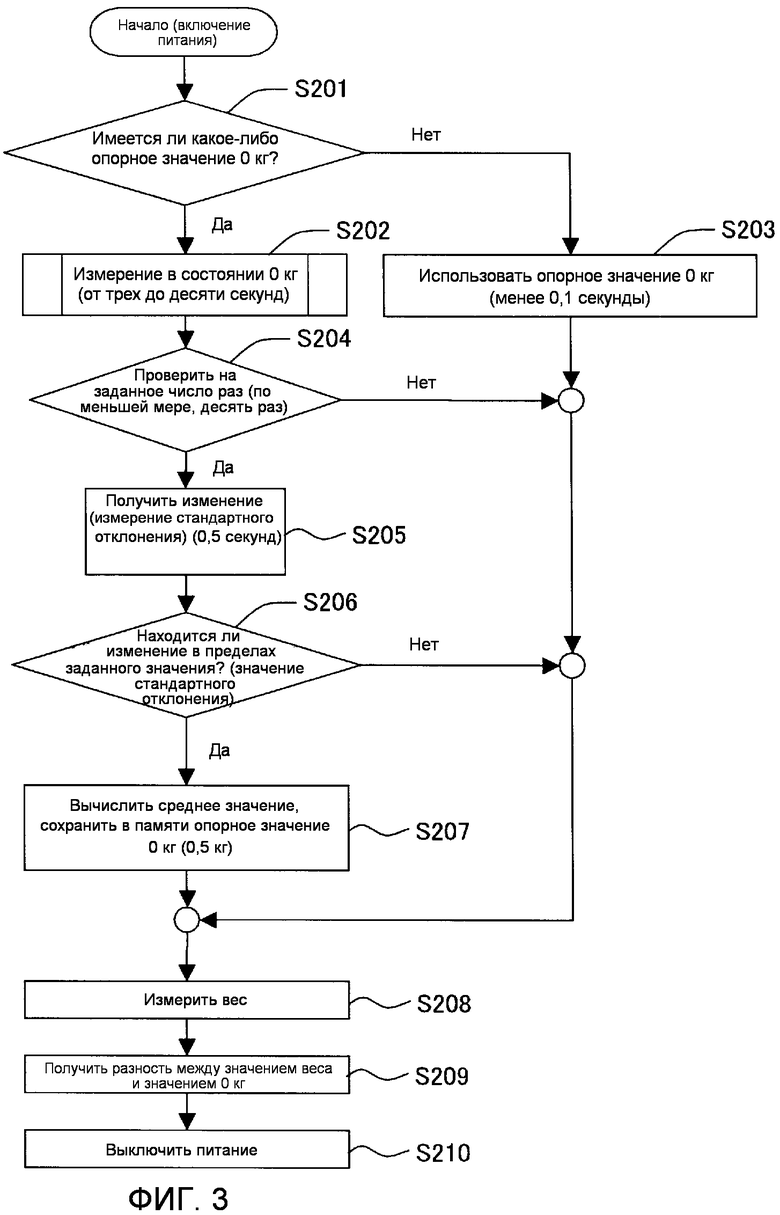
Фиг.3 - блок-схема последовательности этапов способа работы при измерении веса с использованием опорного значения 0 кг.
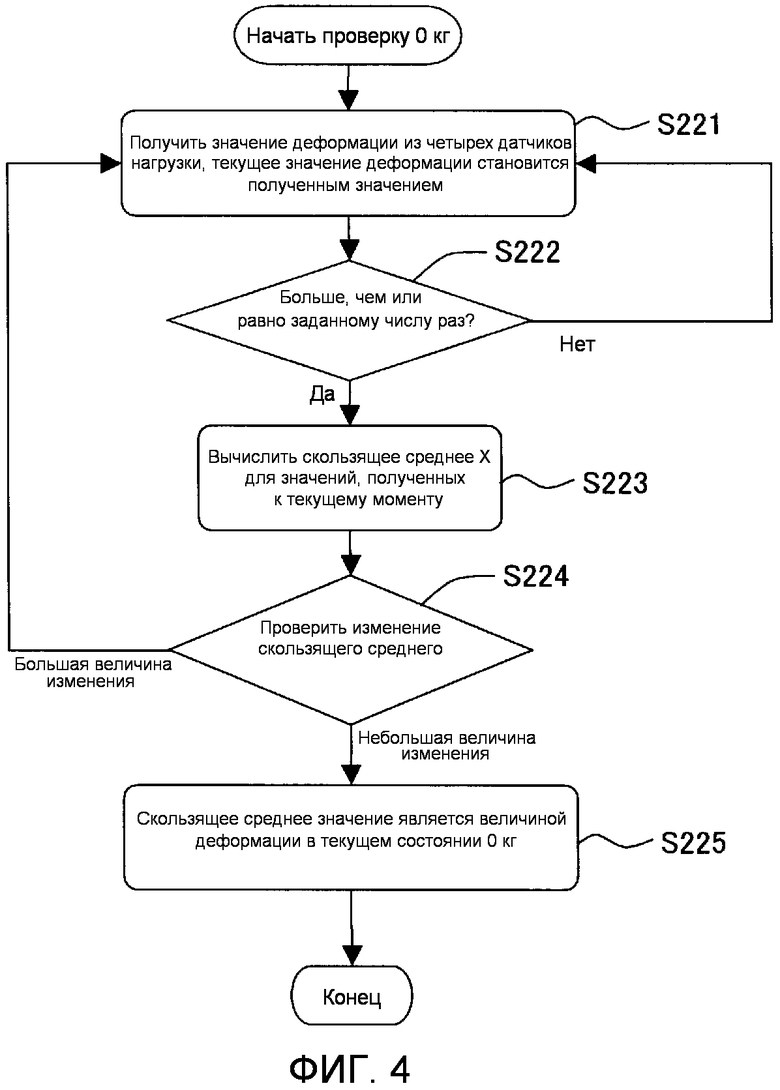
Фиг.4 - блок-схема последовательности этапов способа, подробно показывающая работу в ходе процедуры измерения в состоянии 0 кг.
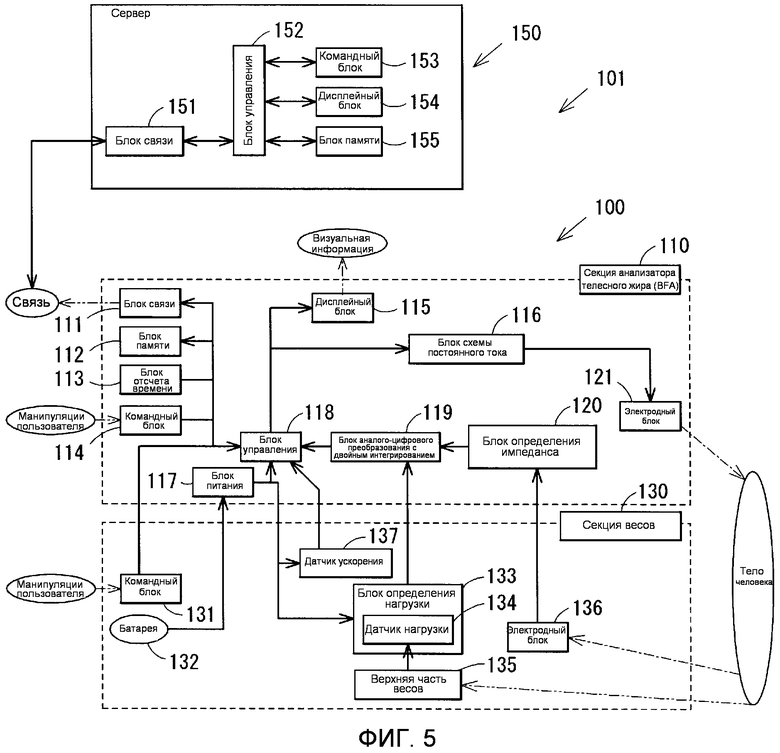
Фиг.5 - блок-схема конфигурации измерителя состава тела во втором примере.
Фиг.6A и 6B - примерные изображения данных, хранящихся в блоке памяти измерителя состава тела во втором примере.
Фиг.7A и 7B - примерные изображения содержимого дисплея, подлежащего отображению на дисплейном блоке измерителя состава тела во втором примере.
Фиг.8 - блок-схема последовательности этапов способа работы, выполняемого блоком управления измерителя состава тела во втором примере.
НАИЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведено описание одного варианта осуществления настоящего изобретения со ссылкой на чертежи.
Первый пример
На фиг.1 представлен внешний вид в перспективе измерителя 100 состава тела, содержащего функцию весов, и на фиг.2 представлена блок-схема конфигурации измерителя 100 состава тела и сервера 150, способного обмениваться информацией с измерителя 100 состава тела. На фиг.2 изображен один измеритель 100 состава тела, соединенный с сервером 150, однако к серверу 150 можно подключать множество разнотипных измерителей 100 состава тела или устройств получения биологической информации, например устройства для взвешивания и измерения новорожденных или измерителя интенсивности действия.
Как показано на фиг.1, измеритель 100 состава тела содержит в конфигурации, в основном, секцию 110 управления дисплеем (секция BFA: секция анализатора телесного жира), выполняющую функцию первого корпуса, подлежащего захвату руками пользователя, и весоизмерительную секцию 130 (секцию весов), выполняющую функцию второго корпуса, на который становится пользователь.
Как показано на фиг.2, секция 110 управления дисплеем содержит блок 111 связи, блок 112 памяти, блок 113 отсчета времени, командный блок 114, дисплейный блок 115, блок 116 схемы постоянного тока, блок 117 питания, блок 118 управления, блок 119 аналого-цифрового преобразования (AD-преобразования) с двойным интегрированием, блок 120 определения импеданса и электродный блок 121.
Блок 111 связи соединен с блоком 118 управления и осуществляет связь с сервером 150 по управляющему сигналу из блока 118 управления. Блок 111 связи может быть выполнен с возможностью связи не только с сервером 150, но также с соответствующим устройством, например, с возможностью связи с другими устройствами получения биологической информации, например устройством для взвешивания и измерения новорожденных, или с возможностью связи с персональным компьютером или портативным информационным терминалом (PDA (персональным электронным секретарем, портативным телефоном и т.п.).
Блок 112 памяти содержит в конфигурации устройство, способное хранить информацию, например энергонезависимую память или жесткий диск, и выполняет считывание и запись информации по управляющему сигналу из блока 118 управления, с которым соединен блок памяти. Блок 112 памяти хранит прошлые значения измерения в состоянии 0 кг и опорные значения 0 кг.
Блок 113 отсчета времени (средство отсчета времени) является устройством для отсчета времени, например текущих даты и времени, и передает время в блок 118 управления, при необходимости.
Командный блок 114 содержит в конфигурации множество клавиш (смотри фиг.1), управляемых нажатием, и передает информацию, вводимую нажатиями пользователя, например данные ввода информации о пользователе, содержащие вес и рост, в блок 118 управления.
Дисплейный блок 115 содержит в конфигурации дисплейное устройство, например жидкокристаллический экран (смотри фиг.1), и отображает изображения, например знаки и фигуры, в соответствии с сигналом изображения, передаваемым из блока 118 управления.
Блок 116 схемы постоянного тока пропускает (переменный) ток высокой частоты, подводимый из блока 117 питания, в одном направлении в электродный блок 121 для подачи тока на основании управления блоком 118 управления.
Блок 117 питания подает рабочее питание в каждый блок, содержащийся в блоке 118 управления.
Блок 118 управления содержит в конфигурации CPU (центральный процессор), ROM (постоянную память), RAM (оперативную память) или микрокомпьютер и выполняет операцию управления и операцию вычисления для каждого блока в соответствии с программой, хранимой в ROM или подобном устройстве.
Блок 119 AD-преобразования с двойным интегрированием является AD-преобразователем (аналого-цифровым преобразователем) с двойным интегрированием и преобразует аналоговый сигнал, подаваемый из блока 120 определения импеданса, в цифровой сигнал.
Блок 120 определения импеданса определяет импеданс на основании разности потенциалов между электродным блоком 136, расположенным в весоизмерительной секции 130, и электродным блоком 121, расположенным в секции 110 управления дисплеем.
Электродный блок 121 расположен на поверхности участка захвата (смотри фиг.1) секции 110 управления дисплеем, подлежащего удерживанию пользователем в руках, и подает (переменный) ток высокой частоты, подводимый из блока 117 питания, в ладонь пользователя, который сжимает участок захвата.
Весоизмерительная секция 130 содержит в конфигурации командный блок 131, батарею 132, блок 133 определения нагрузки и электродный блок 136.
Командный блок 131 выполняет функцию входного переключателя для включения/выключения питания и передает введенный входной сигнал в блок 118 управления.
Батарея 132 осуществляет подачу питания в каждый блок, подключенный к блоку 117 питания.
Блок 133 определения нагрузки содержит датчик 134 нагрузки и измеряет вес пользователя, который становится на блок 135 верхней крышки (смотри фиг.1), выполняющий также функцию верхней крышки корпуса. Вес, измеренный в данном случае, передается в блок 119 AD-преобразования с двойным интегрированием. В датчике 134 нагрузки применяется тензометрический способ определения, при котором тензометрический датчик закреплен к упругой корпусной части, называемой элементом изгиба, и значение деформации упомянутого тензометрического датчика является выходным сигналом. Пропорциональная зависимость между упомянутым значением деформации и напряжением (силой веса) применяется для измерения веса.
Электродный блок 136 является электродом для измерения тока, который расположен на поверхности участка верхней поверхности (смотри фиг.1) весоизмерительной секции 130, на которую становится пользователь, и который воспринимает ток, протекающий из задней части стопы пользователя. Электродный блок 136 содержит в конфигурации четыре электрода со стороны пальцев левой ноги, стороны левой пятки, стороны пальцев правой ноги и стороны правой пятки пользователя.
Сервер 150 содержит в конфигурации блок 151 связи, блок 152 управления, командный блок 153, дисплейный блок 154 и блок 155 памяти.
Блок 151 связи осуществляет передачу и прием данных в/из измерителя 100 состава тела под управлением блока 152 управления.
Блок 152 управления содержит в конфигурации CPU (центральный процессор), ROM (постоянную память) и RAM (оперативную память) и выполняет операцию управления и операцию вычисления для каждого блока в соответствии с программой, хранимой в ROM или подобном устройстве.
Командный блок 153 содержит в конфигурации командное устройство ввода, например клавиатуру или мышь, и передает входной сигнал, введенный путем манипуляций, в блок 152 управления.
Дисплейный блок 154 содержит в конфигурации дисплейное устройство, например жидкокристаллический дисплей или ЭЛТ-дисплей, и осуществляет отображение в соответствии с сигналом управления из блока 152 управления.
Блок 155 памяти содержит в конфигурации запоминающее устройство, например жесткий диск, в котором хранятся различные данные, относящиеся к живому организму, например данные о составе тела (данные о телесном жире и данные веса), измеренные измерителем 100 состава тела, число поэтапных данных, измеренных устройством для взвешивания и измерения новорожденных (не показанным), и данных интенсивности действия, измеренных измерителем интенсивности действия (не показанным), и персональная информация, содержащая имя и адрес пользователя.
Система 101 получения биологической информации содержит в конфигурации измеритель 100 состава тела в вышеописанной конфигурации, сервер 150 и другие устройства получения биологической информации, например устройство для взвешивания и измерения новорожденных или измеритель интенсивности действия (не показанные). Другое устройство получения биологической информации, например устройство для взвешивания и измерения новорожденных или измеритель интенсивности действия (не показанные), обменивается данными с сервером 150 посредством блока 151 связи, а соответствующие данные, например, число этапов, форма сигнала походки и интенсивность действия, сохраняются в блоке 155 памяти сервера 150. Таким образом, возможна работа с биологической информацией большого числа типов.
На фиг.3 представлена блок-схема последовательности этапов способа работы, в ходе которой блок 118 управления измерителя 100 состава тела измеряет вес с использованием опорного значения 0 кг.
Блок 118 управления определяет, хранится ли или нет опорное значение 0 кг в блоке 112 памяти (этап S201), и использует данное опорное значение 0 кг в качестве значения 0 кг измерения веса (этап S203), когда опорное значение 0 кг хранится (этап S201: Нет), и переходит к процедуре этапа S208. В данном случае, время, необходимое до установки опорного значения 0 кг для использования, является очень коротким временем, меньше чем 0,1 секунда.
Когда опорное значение 0 кг не хранится в блоке 112 памяти (этап S201: Да), блок 118 управления получает значение измерения в состоянии 0 кг посредством выполнения процедуры измерения в состоянии 0 кг блоком 133 определения нагрузки (этап S202). Более подробное описание процедуры измерения в состоянии 0 кг приведено в дальнейшем, при этом на выполнение измерения требуется некоторое время, например от трех до десяти секунд.
После окончания измерения в состоянии 0 кг и получения значения измерения в состоянии 0 кг блок 118 управления определяет, выполнено ли или нет измерение 0 кг, по меньшей мере, заданное число раз (например, десять раз), включая значение измерения в состоянии 0 кг, накопленное в блоке 112 памяти в прошлый раз (этап S204).
Если число раз меньше, чем заданное число раз (этап S204: Нет), то блок 118 управления использует значение измерения в состоянии 0 кг, полученное на этапе S202, в качестве значения измерения 0-кг веса и переходит к процедуре этапа S208.
Если число раз больше чем или равно заданному числу раз (этап S204: Да), то блок 118 управления выполняет измерение стандартного отклонения (этап S205). Измерение стандартного отклонения является процедурой для получения колебания накопленного значения измерения в состоянии 0 кг, содержащего значение измерения в состоянии 0 кг, полученное на этапе S202, при этом вычисляется стандартное отклонение упомянутого колебания. Вычисление для получения колебания занимает приблизительно 0,5 секунд.
Когда колебание выходит за пределы заданного значения (этап S206: Нет), блок 118 управления использует значение измерения в состоянии 0 кг, полученное на этапе S202, в качестве значения измерения 0-кг веса и переходит к процедуре этапа S208.
Когда колебание находится в пределах заданного значения (этап S206: Да), блок 118 управления вычисляет среднее значение накопленного значения измерения в состоянии 0 кг, содержащего значение измерения в состоянии 0 кг, полученное на этапе S202, и сохраняет упомянутое среднее значение в блоке 112 памяти в качестве опорного значения 0 кг (этап S207). На вышеупомянутые вычисление и сохранение требуется приблизительно 0,5 секунд. При этом блок 118 управления устанавливает либо значение измерения в состоянии 0 кг, полученное на этапе S202, либо опорное значение 0 кг, вычисленное на этапе S207, для значения измерения 0-кг веса. Какое из значений следует применить в качестве значения измерения 0-кг веса, может быть установлено заранее.
Блок 118 управления выполняет измерение веса для получения выходного значения, выдаваемого блоком 133 определения нагрузки, с пользователем на блоке 135 верхней крышки (этап S208).
Затем блок 118 управления принимает разность со значением измерения 0-кг веса в качестве выходного значения, полученного на этапе S208, выдает упомянутую разность в качестве значения веса (этап S209) и выключает питание (этап S210), чтобы завершить работу. Упомянутый результат может быть обработан соответствующим способом, например отображен на дисплейном блоке 115, сохранен в блоке 112 памяти и передан в сервер 150.
На фиг.4 представлена блок-схема последовательности этапов способа, подробно показывающая работу в ходе вышеописанной процедуры измерения в состоянии 0 кг на этапе S202.
Блок 118 управления получает значение деформации из четырех датчиков 134 нагрузки (смотри фиг.2), расположенных в блоке 133 определения нагрузки (этап S221). При наличии упомянутого значения деформации текущее значение деформации становится полученным значением.
Блок 118 управления проверяет, является ли или нет число раз получения значения деформации больше чем или равным заданному числу раз (этап S222). Если число раз меньше, чем заданное число раз (этап S222: Нет), то процедура возвращается к этапу S221, чтобы снова выполнить получение значения деформации.
Если число раз больше чем или равно заданному числу раз (этап S222: Да), то блок 118 управления вычисляет скользящее среднее (скользящее среднее X) из значений, полученных к настоящему моменту, и получает скользящее среднее значение (этап S223).
Блок 118 управления проверяет изменение скользящего среднего значения и возвращается к процедуре этапа S221, чтобы снова выполнить получение значения деформации, если величина изменения является большой (этап S224: большая величина изменения).
Если величина изменения скользящего среднего значения является небольшой (этап S224: небольшая величина изменения), блок 118 управления определяет, что данное скользящее среднее значение является величиной деформации в текущем состоянии 0 кг (этап S225), и завершает процедуру.
Измерение процентного содержания телесного жира измерителем 100 состава тела может выполняться посредством выполнения вычисления по предварительно заданному уравнению на основании импеданса, измеренного блоком 120 определения импеданса.
Как изложено выше, измеритель 100 состава тела содержит средство измерения исходного значения (блок 118 управления, который выполняет этап S202) для выполнения измерения выходного значения в исходном состоянии (состоянии 0 кг), в котором пользователь не стоит на измерителе, запоминающее средство (блок 112 памяти) для хранения множества измеренных исходных значений, средство формирования исходного опорного значения (блок 118 управления, который выполняет этап S207) для формирования исходного опорного значения, когда колебание множества исходных значений находится в пределах предварительно заданного диапазона (в пределах заданного значения), и средство применения исходного опорного значения (блок 118 управления, который выполняет этап S209) для измерения с использованием исходного опорного значения при измерении веса с помощью весоизмерительного средства (блока 133 определения нагрузки), и, следовательно, точное измерение веса можно осуществить за короткое время.
Другими словами, когда состояние 0 кг всегда измеряется перед началом измерения веса, то каждый раз требуется время приблизительно от трех до десяти секунд, и измерение невозможно начать немедленно. Если измерение 0 кг выполняется каждый раз приблизительно десять раз с начала измерения, и состояние 0 кг измерителя состава тела сохраняется, и среднее значение устанавливается в качестве опорного значения 0 кг, когда колебание является небольшим, то измерение тела может выполняться при сокращении времени, необходимого для последующего измерения 0 кг. Поэтому время измерения можно сократить с использованием того, что состояние 0 кг измерителя состава тела очень мало изменяется после того, как измеритель 100 состава тела установлен на месте измерения.
Кроме того, можно прогнозировать значение измерения в состоянии 0 кг в следующий раз и можно исключать время, необходимое для измерения состояния 0 кг, благодаря накоплению значения измерения в состоянии 0 кг в блоке 112 памяти и сервере 150.
Второй пример
Ниже описан второй пример настройки опорного значения 0 кг, при необходимости.
На фиг.5 представлена блок-схема конфигурации измерителя 100A состава тела. Измеритель 100A состава тела содержит датчик 137 ускорения в весоизмерительной секции 130A. Датчик 137 ускорения регистрирует изменение ускорения, вызываемого перемещением или вибрацией, и передает зарегистрированный сигнал ускорения в блок 118 управления. В качестве датчика ускорения можно применить подходящий датчик ускорения, однако трехмерный датчик ускорения является предпочтительным для регистрации перемещения и вибраций по всем направлениям.
Другие конфигурации аналогичны конфигурации первого примера, и поэтому для обозначения одинаковых элементов применяются одинаковые числовые позиции, и их подробное описание далее отсутствует.
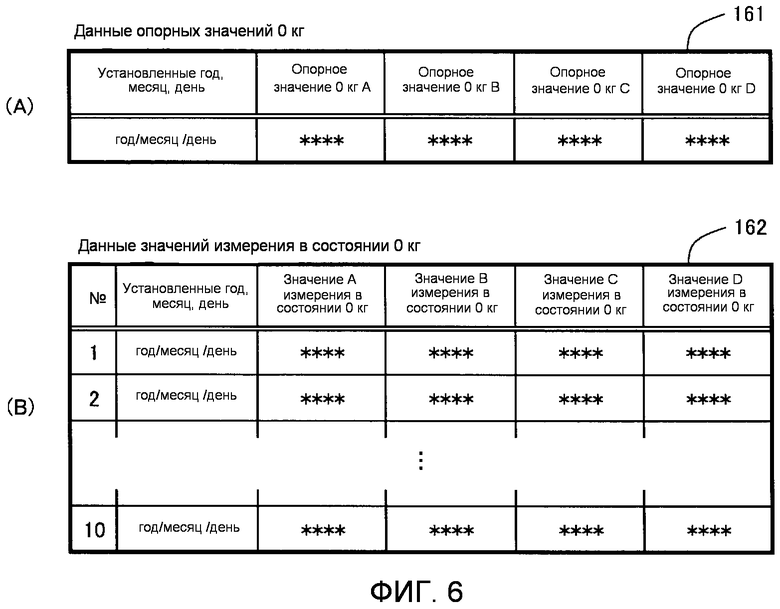
На фиг.6A и 6B представлены поясняющие изображения данных, хранящихся в блоке 112 памяти измерителя 100A состава тела, где на фиг.6A показаны данные 161 опорных значений 0 кг, и на фиг.6B показаны данные 162 значений измерения в состоянии 0 кг.
Как показано на фиг.6A, данные 161 опорных значений 0 кг хранят установленные год, месяц и день, полученные из блока 113 отсчета времени в момент настройки и опорные значения 0 кг A-D, установленные для четырех датчиков 134 нагрузки. Данные 161 опорных значений 0 кг сконфигурированы как данные одной записи для хранения только одних данных для каждого элемента данных.
Как показано на фиг.6B, данные 162 значений измерения в состоянии 0 кг хранят установленные год, месяц и день, полученные из блока 113 отсчета времени в момент измерения, и опорные значения 0 кг A-D, установленные для четырех датчиков 134 нагрузки. Данные 162 значений измерения в состоянии 0 кг хранят значения деформации четырех датчиков 134 нагрузки, измеренные на этапе S221, описанном в первом примере, вместе с годом, месяцем и днем измерения и сконфигурированы с возможностью сохранения за множество раз (за десять раз в настоящем примере). Данные хранятся в порядке с первой записи и возвращаются к первой записи и перезаписываются после того, как данные записываются до последней записи. Таким образом, можно сохранять множество самых последних данных.
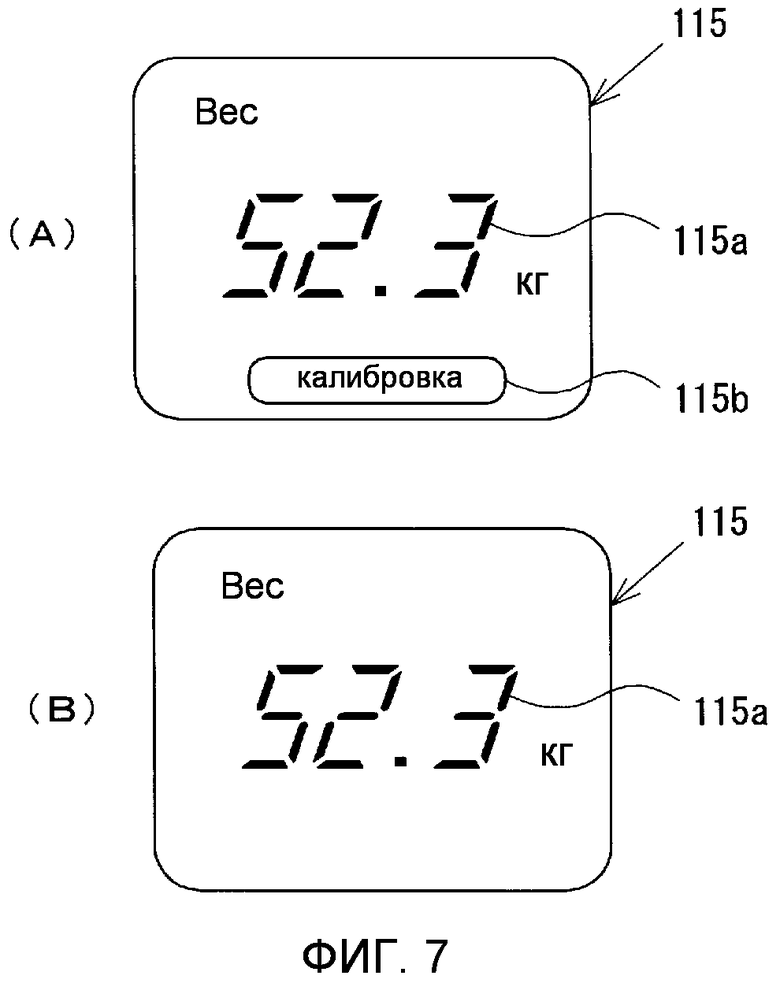
На фиг.7A и 7B представлены поясняющие изображения содержимого дисплея, подлежащего отображению на дисплейном блоке 115 измерителя 100A состава тела. Как показано на фиг.7A, дисплейный блок 115 содержит участок 115a отображения веса для отображения измеренного веса и участок 115b отображения калибровки, показывающий вес, в котором состояние 0 кг измерено непосредственно перед этим, и использовано данное значение измерения в состоянии 0 кг.
Если на этапе S201 в первом примере опорное значение 0 кг отсутствует (этап S201: Да), то на участке 115b отображения калибровки отображается показание «калибровка» («calibration»), как показано на фиг.7A. Если на этапе S201 в первом примере (этап S201: Нет) опорное значение 0 кг присутствует, то на участке 115b отображения калибровки ничего не отображается, и вес отображается на участке 115a отображения веса, как показано на фиг.7B.
Отображение на участке 115b отображения калибровки не ограничено отображением показания «калибровка» («calibration»), как показано на чертеже, и возможно выполнение подходящих отображений, например вывод других предложений, например «корректировка непосредственно перед измерением» («adjustment right before»), или отображение подходящих заданных фигур.
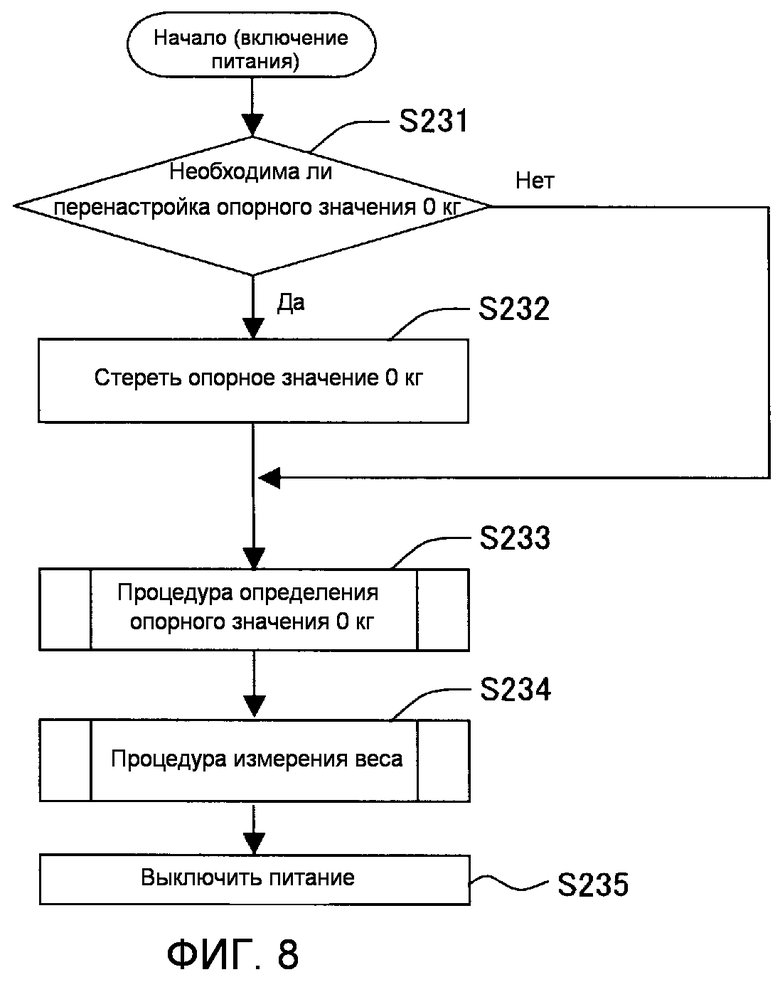
На фиг.8 представлена блок-схема последовательности этапов способа работы, в процессе которой блок 118 управления измерителя 100A состава переустанавливает опорное значение 0 кг при необходимости и использует опорное значение 0 кг для выполнения измерения веса.
Когда питание включается, блок 118 управления определяет, необходима ли или нет перенастройка опорного значения 0 кг (этап S231). Данное определение делается на основании того, выполняется ли или нет предварительно заданное условие. В частности, определение, что перенастройка необходима, может быть сделано, когда на текущую дату истекло, по меньшей мере, предварительно заданное количество дней после установленного года, месяца и дня, хранящихся в данных 161 опорных значений 0 кг в блоке 112 памяти, и в другом случае может быть сделано определение, что перенастройка не обязательна.
Кроме того, могут быть измерены значения измерения в состоянии 0 кг четырьмя датчиками 134 нагрузки, из данных 162 значений измерения в состоянии 0 кг в блоке 112 памяти выбираются значения A-D измерения в состоянии 0 кг (в данном случае значение измерения в состоянии 0 кг, измеренное после окончания измерения веса является предпочтительным) от самого последнего датчика 134 нагрузки в прошлом, и может быть произведено сравнение упомянутых значений, чтобы, когда имеет место изменение на, по меньшей мере, предварительно заданную величину, делать определение, что перенастройка необходима.
Определение, что перенастройка необходима, может быть сделано, когда, после измерения в предыдущий раз, датчиком 137 ускорения обнаруживается изменение ускорения на, по меньшей мере, предварительно заданную величину. В данном случае, когда датчиком 137 ускорения обнаруживается изменение ускорения на, по меньшей мере, предварительно заданную величину, величина изменения ускорения и измененные год, месяц, день могут сохраняться в блоке 112 памяти. Если обнаруженное изменение ускорения происходит после самого последнего измерения в прошлом, то может быть сделано определение, что перенастройка необходима, в предположении, что имеет место изменение ускорения из-за перемещения или по подобной причине.
Определение, что перенастройка необходима, может быть сделано, если удовлетворяется, по меньшей мере, один критерий, при использовании множества критериев, например количества дней, состояния 0 кг или изменения ускорения, в качестве предварительно заданной базы отсчета.
При определении данным способом, что перенастройка необходима (этап S231: Да), блок 118 управления может стереть данные 161 опорных значений 0 кг в блоке 112 памяти (этап S232) и выполнить процедуру определения опорного значения 0 кг (этап S233). В данном случае, могут также стираться данные 162 значений измерения в состоянии 0 кг.
При определении, что перенастройка необязательна (этап S231: Нет), блок 118 управления выполняет процедуру определения опорного значения 0 кг (этап S233).
Процедура определения опорного значения 0 кг содержит выполнение таких же процедур, как на этапах S201-S207 в вышеописанном первом примере, и их подробное описание далее не приведено. Поэтому измерение в состоянии 0 кг согласно этапу S202 выполняется при определении, что перенастройка необходима, на этапе S231, и опорное значение 0 кг применяется на этапе S203, при определении, что перенастройка не обязательна, на этапе S231.
Блок 118 управления выполняет процедуру измерения веса (этап S234). Процедура измерения веса содержит выполнение таких же процедур, как на этапах S208-S209 в вышеописанном первом примере, и их подробное описание далее не приведено. На этапе S209 факт выполнения или невыполнения калибровки (корректировки опорного значения 0 кг) непосредственно перед измерением, как показано на фиг.7A (на участке 115b отображения калибровки), также отображается одновременно с отображением измеренного веса на дисплейном блоке 115.
Блок 118 управления определяет, таким образом, необходима ли или нет перенастройка опорного значения 0 кг, определяет опорное значение 0 кг и выключает питание после выполнения измерения веса для окончания процедуры (этап S235).
В соответствии с вышеописанными конфигурацией и порядком работы определение, что перенастройка требуется, может быть сделано, и опорное значение 0 кг может быть настроено, когда требуется перенастройка состояния 0 кг, например, когда измеритель 100A состава тела перемещается.
Когда соответствующие значения деформации (значения тензометрических датчиков), измеренные четырьмя датчиками 134 нагрузки, сохраняются как значения A-D измерения в состоянии 0 кг, то посредством сравнения упомянутых значений можно определить наклон поверхности днища. Другими словами, когда человек не стоит на измерителе, к тензометрическому датчику прикладывается только собственный вес измерителя 100A состава тела, и, следовательно, посредством сравнения с данным весом можно определить наклон поверхности днища. Тем самым, можно предотвратить погрешность измерения веса, обусловленную наклоном днища.
Как повышение точности измерения, так и сокращение времени измерения можно обеспечить в соответствии с режимом применения весов (измерителя 100A состава тела), которые часто располагаются в одном месте, после того как весы установлены.
Другими словами, при установке в некотором месте каждый раз сначала выполняется измерение в состоянии 0 кг, и затем может выполняться высокоточное измерение веса, хотя данная процедура занимает некоторое время. Когда значение измерения в состоянии 0 кг накапливается предварительно заданное число раз, например десять раз, среднее значение сохраняется как опорное значение 0 кг, и данное опорное значение 0 кг применяется в последующем для выполнения измерения веса за короткий период времени. В данном случае, значения, сохраненные как опорное значение 0 кг, ограничены значениями, изменение которых не выходит за пределы заданного значения, и, тем самым, можно обеспечить высокую точность.
При удовлетворении критерия перенастройки, например, когда весы (измеритель 100A состава тела) перемещают, и состояние 0 кг изменяется, опорное значение 0 кг стирается (сбрасывается), и измерение в состоянии 0 кг, и настройка опорного значения 0 кг выполняются с самого начала.
Тем самым, опорное значение 0 кг корректируется до наиболее подходящего состояния на месте установки каждый раз, когда весы (измеритель 100A состава тела) перемещают или подвергают подобному воздействию, так что пользователь может получать высокоточный вес просто при установке весов (измерителя 100A состава тела) и измерении веса без выполнения сложной работы.
Перенастройка опорного значения 0 кг выполняется даже в случае, если значение измерения в состоянии 0 кг изменяется, когда весы (измеритель 100A состава тела) переставляют на месте установки или когда весы сталкиваются с предметом, и их наклон изменяется, и, следовательно, высокоточное измерение может выполняться постоянно в наиболее подходящем состоянии.
Кроме того, перенастройка опорного значения 0 кг выполняется, когда истекает предварительно заданное время, и, следовательно, выполняется повторная корректировка, чтобы обеспечить возможность точного измерения, даже если изменение состояния 0 кг происходит из-за долговременного или подобного изменения.
Достигаемые эффекты являются такими же, как в первом примере.
В каждом вышеописанном примере измерение 0 кг выполняется перед измерением веса, однако данный подход не является единственно возможным, и можно применить конфигурацию с исполнением измерения 0 кг после измерения веса или конфигурацию с исполнением измерения 0 кг до и после измерения веса. В частности, при выполнении измерения в состоянии 0 кг до и после измерения веса может применяться среднее значение из значений измерения в состоянии 0 кг, измеренных до и после измерения веса, или на дисплейном блоке 115 может отображаться погрешность, требующая повторного измерения, когда существует разность значений деформации в состоянии 0 кг, измеренных до и после измерения веса, что дополнительно повышает точность.
Время, хранимое в данных 161 опорных значений 0 кг и данных 162 значений измерения в состоянии 0 кг, представляет год, месяц и день, но без ограничения ими, и можно принять любую подходящую единицу измерения, которая может определять истекшее время, например дату и время.
В соответствии с конфигурацией настоящего изобретения и вышеописанного варианта осуществления,
весоизмерительное устройство согласно настоящему изобретению соответствует измерителям 100, 100A состава тела в соответствии с вариантом осуществления; и, аналогично,
запоминающее средство соответствует блоку 112 памяти;
средство отсчета времени соответствует блоку 113 отсчета времени;
средство отображения соответствует дисплейному блоку 115;
средство применения исходного опорного значения соответствует блоку 118 управления, который выполняет этап S203;
измерительное средство применения исходного значения соответствует блоку 118 управления, который выполняет этап S204: НЕТ и этап S206: НЕТ;
средство формирования исходного опорного значения соответствует блоку 118 управления, который выполняет этап S207;
средство измерения исходного значения соответствует блоку 118 управления, который выполняет этап S221;
средство определения необходимости коррекции соответствует блоку 118 управления, который выполняет этап S231;
средство прекращения применения исходного опорного значения соответствует блоку 118 управления, который выполняет этап S232;
весоизмерительное средство соответствует датчику 134 нагрузки;
средство определения ускорения соответствует датчику 137 ускорения;
исходное опорное значение соответствует опорным значениям A-D для 0 кг в данных 161 опорных значений 0 кг;
исходное значение соответствует значению измерения в состоянии 0 кг;
предварительно заданное время соответствует предварительно заданному количеству дней;
выходное значение весоизмерительного средства соответствует значению деформации;
объект измерения соответствует пользователю;
предварительно заданное изменение соответствует изменению на, по меньшей мере, предварительно заданную величину;
предварительно заданный диапазон соответствует заданному значению; и
исходное состояние соответствует состоянию, в котором пользователь не стоит на измерителе; но
настоящее изобретение не ограничено одной лишь конфигурацией вышеописанного варианта осуществления, и можно получить большое число вариантов осуществления.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение можно использовать в различных областях, в которых выполняют измерение веса, как в случае устройства для измерения живого организма, содержащего весы для измерения веса человека или весы для животных, предназначенные для измерения веса животного, или как в случае устройства для измерения веса изделия.
ОПИСАНИЕ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
100, 100A измеритель состава тела
112 блок памяти
113 блок отсчета времени
115 дисплейный блок
118 блок управления
134 датчик нагрузки
137 датчик ускорения
161 данные опорных значений 0 кг
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ВЛАГИ И ИЗМЕРИТЕЛЬ ВЛАГИ ТЕЛА | 2012 |
|
RU2601153C2 |
| ВЕСЫ | 2008 |
|
RU2417353C1 |
| СИСТЕМА УПРАВЛЕНИЯ БИОЛОГИЧЕСКОЙ ИНФОРМАЦИЕЙ И СПОСОБ УПРАВЛЕНИЯ БИОЛОГИЧЕСКОЙ ИНФОРМАЦИЕЙ | 2010 |
|
RU2519417C2 |
| УСТРОЙСТВО ВЫДАЧИ МЕТОДИЧЕСКИХ РЕКОМЕНДАЦИЙ ПО УПРАВЛЕНИЮ СОСТОЯНИЕМ ЗДОРОВЬЯ | 2008 |
|
RU2435519C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2009 |
|
RU2522391C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ, СОДЕРЖАЩЕЕ МАНЖЕТУ, ОБОРАЧИВАЕМУЮ ВОКРУГ МЕСТА ИЗМЕРЕНИЯ | 2009 |
|
RU2515860C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АРТЕРИАЛЬНОГО ДАВЛЕНИЯ ДЛЯ ВЫПОЛНЕНИЯ ПРОЦЕССА, УЧИТЫВАЮЩЕГО ИЗМЕНЕНИЕ ОКРУЖАЮЩИХ УСЛОВИЙ ПРИ ИЗМЕРЕНИИ | 2009 |
|
RU2497444C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ ТЕЛА | 2009 |
|
RU2517766C2 |
| ИЗМЕРИТЕЛЬ АКТИВНОСТИ | 2008 |
|
RU2446740C2 |
| МНОГОЭКРАННОЕ ДИСПЛЕЙНОЕ УСТРОЙСТВО | 2011 |
|
RU2473943C2 |
Настоящее изобретение относится к устройствам для измерения веса, в частности для измерения веса тела живого организма. Для точного распознавания состояния 0 кг и для сокращения времени, требуемого для измерения веса, измеритель 100, 100A состава тела, содержащий датчик 134 нагрузки для измерения веса, выполняет этап S221 измерения выходного значения датчика 134 нагрузки в исходном состоянии, в котором на измерителе не стоит объект измерения, содержит блок 112 памяти для хранения множества измеренных выходных значений в исходном состоянии, выполняет этап S207 для формирования данных 161 опорных значений 0 кг, когда изменение множества выходных значений в исходном состоянии находится в пределах предварительно заданного диапазона, и этап S204 измерения с использованием исходного опорного значения при измерении веса датчиком 134 нагрузки. Результатом применения предлагаемого изобретения является точное распознавание состояния 0 кг и сокращение времени, необходимого для измерения веса. 2 н. и 5 з.п. ф-лы, 8 ил.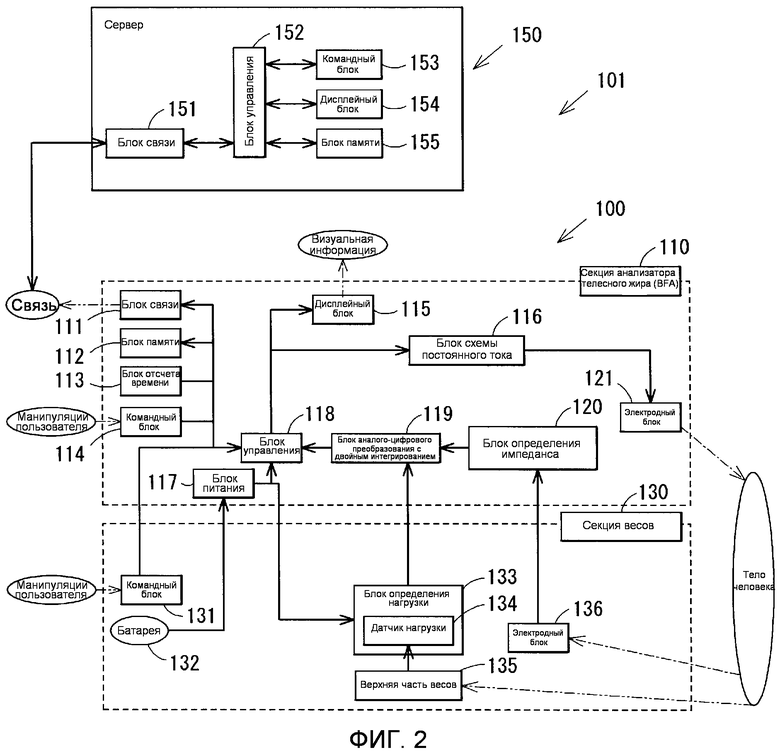
1. Весоизмерительное устройство, содержащее весоизмерительное средство для измерения веса, при этом весоизмерительное устройство содержит:
средство измерения исходного значения для выполнения измерения выходного значения весоизмерительного средства в исходном состоянии, в котором объект измерения не стоит на измерителе;
запоминающее средство для хранения множества измеренных исходных значений;
средство формирования исходного опорного значения для формирования исходного опорного значения, когда изменение множества исходных значений находится в пределах предварительно заданного диапазона; и
средство применения исходного опорного значения для измерения с использованием исходного опорного значения при измерении веса объекта измерения весоизмерительным средством, причем
средство формирования исходного опорного значения сохраняет сформированное исходное опорное значение в запоминающем средстве;
средство применения исходного опорного значения имеет конфигурацию, пригодную для измерения веса объекта измерения с использованием исходного опорного значения, когда исходное опорное значение хранится в запоминающем средстве, и содержит измерительное средство применения исходного значения для измерения веса объекта измерения с использованием исходного значения, измеренного средством измерения исходного значения, когда исходное опорное значение не хранится в запоминающем средстве,
средство определения необходимости коррекции для определения необходимости коррекции исходного опорного значения; и
средство прекращения применения исходного опорного значения для прекращения применения исходного опорного значения, хранящегося в запоминающем средстве, при определении средством определения необходимости коррекции, что коррекция необходима,
при этом средство определения необходимости коррекции имеет конфигурацию, пригодную для определения, что коррекция необходима, если имеет место колебание выходного значения весоизмерительного средства, когда измерение веса объекта измерения не выполняется, и определения, что коррекция не обязательна в ином случае.
2. Весоизмерительное устройство по п.1, в котором
запоминающее средство имеет конфигурацию, пригодную для сохранения выходного значения весоизмерительного средства каждый раз после измерения веса в качестве измеренного значения; и
средство определения необходимости коррекции имеет конфигурацию, пригодную для определения исходного значения до начала измерения веса и сравнения исходного значения и самого последнего измеренного значения, считанного из запоминающего средства, чтобы определять, что коррекция необходима, когда имеет место предварительно заданное изменение, и определять, что коррекция не обязательна в ином случае.
3. Весоизмерительное устройство по п.1, дополнительно содержащее:
средство отсчета времени для измерения истекшего времени, при этом
средство определения необходимости коррекции имеет конфигурацию, пригодную для определения, что коррекция необходима, когда со времени формирования исходного опорного значения средством формирования исходного опорного значения истекло предварительно заданное время, и определения, что коррекция не обязательна в ином случае.
4. Весоизмерительное устройство по п.1, дополнительно содержащее:
средство определения ускорения для определения изменения ускорения при перемещении или вибрации, при этом
средство определения необходимости коррекции имеет конфигурацию, пригодную для определения, что коррекция необходима, когда средством определения ускорения обнаруживается изменение ускорения, и определения, что коррекция не обязательна в ином случае.
5. Весоизмерительное устройство по п.1, дополнительно содержащее средство отображения для отображения, измерен ли вес с использованием исходного значения, измеренного средством измерения исходного значения, или измерен ли вес с использованием исходного опорного значения, хранящегося в запоминающем средстве.
6. Способ измерения веса для измерения веса весоизмерительным устройством, содержащим весоизмерительное средство, при этом способ содержит этапы, на которых:
выполняют измерение исходного значения весоизмерительного средства, на котором не стоит объект измерения, с использованием средства измерения исходного значения;
сохраняют множество измеренных исходных значений в запоминающем средстве;
формируют исходное опорное значение средством формирования исходного опорного значения, когда изменение множества исходных значений находится в пределах предварительно заданного диапазона, и сохраняют исходное опорное значение в запоминающем средстве;
измеряют вес с использованием исходного опорного значения, когда исходное опорное значение хранится в запоминающем средстве, средством применения исходного опорного значения при измерении веса весоизмерительным средством; и
измеряют вес измерительным средством применения исходного значения с использованием исходного значения, измеренного средством измерения исходного значения, когда исходное опорное значение не хранится в запоминающем средстве,
необходимость коррекции исходного опорного значения определяют средством определения необходимости коррекции; и
прекращают применение исходного опорного значения, хранящегося в запоминающем средстве, средством прекращения применения исходного опорного значения при определении необходимости коррекции средством определения необходимости коррекции,
определяют, что коррекция необходима, если имеет место колебание выходного значения весоизмерительного средства, когда измерение веса объекта измерения не выполняют, и определяют, что коррекция не обязательна в ином случае.
7. Способ измерения веса по п.6, дополнительно содержащий этап отображения того факта, измерен ли вес с использованием исходного значения, измеренного средством измерения исходного значения, или измерен ли вес с использованием исходного опорного значения, хранящегося в запоминающем средстве.
| US 3986012 A1 12.10.1976 | |||
| JP 2000018592 A 18.01.2000 | |||
| WO 2007077650 A1 12.07.2007 | |||
| JP 2007330200 A 27.12.2007 | |||
| Способ калибровки электронных весов | 1989 |
|
SU1696888A1 |

