ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству определения движения тела для определения движения тела живого организма, например педометру для подсчета числа шагов живого организма или измерителю величины активности для измерения величины активности живого организма.
УРОВЕНЬ ТЕХНИКИ
Различные устройства определения движения тела, например педометр и измеритель величины активности, обычно, предлагались в виде устройства для определения движения тела живого организма. Упомянутые предложенные устройства определения движения тела планировалось применять в состоянии закрепления или размещения в различных местах.
Например, предложен педометр для закрепления на поясном ремне, нагрудном кармане одежды и т.п. посредством фиксации зажимом (см. патентный документ 1). Данный способ закрепления посредством фиксации зажимом обладает преимуществом стабильного измерения числа шагов, так как задает направление закрепления.
Однако данный способ имеет недостатки, обусловленные ограничением участков на одежде, в которых можно производить фиксацию зажимом, и может негативно влиять на внешний вид пользователя из-за выступающей формы педометра.
Предложен также измеритель величины физической нагрузки маятникового типа в форме наручных часов, подлежащий закреплению на руке ремнем (см. патентный документ 2). Данный способ закрепления на руке ремнем дает преимущество в том, что не ограничивается одеждой и что пользователь может с удобством наблюдать показание на дисплее.
Однако данный способ имеет недостатки, связанные с тем, что измерение невыполнимо для действий, в которых не принимает интенсивного участия рука, и что применение ограничено повседневным использованием.
Предлагалось также устройство определения движения тела, которое дает возможность измерять число шагов, даже если основной блок наклонен, благодаря применению датчика с чувствительностью по множеству осей, и может быть носимым в кармане одежды или в сумке (см. патентный документ 3). Данный способ применения датчика с чувствительностью по множеству осей обладает преимуществом высокой портативности.
Однако данный способ имеет недостаток подверженности воздействиям различных движений тела, когда измерение выполняется в наклонном состоянии, и реакция на широкий диапазон действий с высокой точностью становится затруднительной.
В связи с этим преимущества и недостатки существуют независимо от применяемой формы закрепления устройства определения движения тела, и недостатки невозможно устранить одной формой закрепления.
ДОКУМЕНТАЛЬНЫЕ ССЫЛКИ НА ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный документ 1: Находящаяся на рассмотрении заявка на патент Японии № 04-080431.
Патентный документ 2: Находящаяся на рассмотрении заявка на патент Японии № 2002-56372.
Патентный документ 3: Находящаяся на рассмотрении заявка на патент Японии № 2002-191580.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЦЕЛИ ИЗОБРЕТЕНИЯ
С учетом вышеописанных недостатков целью настоящего изобретения является совершенствование степеней свободы режима использования и повышение точности измерения посредством определения формы закрепления, при которой имеет место использование, и определения движения тела в режиме, подходящем для определенной формы закрепления.
СРЕДСТВА ДОСТИЖЕНИЯ ЦЕЛИ
В соответствии с настоящим изобретением предлагается устройство определения движения тела, содержащее средство определения ускорения для определения ускорения и вычислительное средство для выполнения процедуры вычисления движения тела по вычислению движения тела живого организма на основании данных ускорения, определенных средством определения ускорения, при этом устройство определения движения тела содержит участок закрепления/раскрепления для обеспечения возможности закрепления закрепляемой рабочей части, подлежащей закреплению на живом организме или предмете, связанном с живым организмом, на основном блоке устройства или раскрепления от него, причем вычислительное средство выполнено с возможностью выполнения процедуры определения закрепления/раскрепления по определению закрепления или раскрепления на основании изменения ускорения, представляемого данными ускорения, при закреплении закрепляемой рабочей части на участке закрепления/раскрепления или при раскреплении от него, и выполнения процедуры вычисления движения тела на основании определенного закрепления/раскрепления, при переключении в режим, соответствующий состоянию после закрепления/раскрепления.
Средство определения ускорения может быть выполнено в виде средства, способного определять изменение ускорения, например датчика ускорения. В случае датчика ускорения можно применить одномерный, двумерный или трехмерный датчик ускорения, но предпочтительным вариантом является применение трехмерного датчика ускорения.
Процедура вычисления движения тела может быть процедурой подсчета числа шагов по подсчету числа шагов, процедурой вычисления величины жизненной активности по вычислению величины жизненной активности, процедурой вычисления интенсивности махов руками по вычислению интенсивности махов руками или множеством упомянутых процедур.
Предмет, связанный с живым организмом, содержит одежду для нижней половины тела, например брюки и юбку, или поясной ремень.
Закрепляемая рабочая часть выполнена в виде оборудования, подлежащего закреплению на живом организме или предмете, связанном с живым организмом, например зажимного инструмента, содержащего зажим для закрепления к одежде для нижней половины тела, например брюкам или юбке, или поясному ремню, или ремня для закрепления на руке или ноге.
Основной блок устройства может быть корпусом, содержащим средство определения ускорения и вычислительное средство.
Участок закрепления/раскрепления может быть выполнен в виде участка зацепления, например подходящих направляющей, выступа, резьбы, винтовой канавки, отверстия или канавки, на котором закрепляется или от которого раскрепляется предварительно заданный зацепляющий участок закрепления/раскрепления, расположенный в закрепляемой рабочей части.
Процедура определения закрепления/раскрепления может быть процедурой определения изменения ускорения, которое возникает при закреплении или раскреплении, например процедурой определения изменения ускорения по удару, который происходит при закреплении закрепляемой рабочей части на основном блоке устройства или раскреплении от него, процедурой определения изменения ускорения по перемещению или повороту основного блока устройства вдоль направляющей участка закрепления/раскрепления или сочетанием упомянутых процедур.
Режим может быть режимом закрепления на поясе, режимом закрепления на руке, режимом ношения в кармане или множеством приведенных режимов. После переключения режимов движение тела, подлежащее вычислению, может переключаться на число шагов, величину жизненной активности, интенсивность махов руками и т.п., может переключаться пороговая величина для использования при вычислении движения тела или могут выполняться оба вышеупомянутых переключения.
Устройство определения движения тела может быть соответствующим устройством, например педометром для подсчета числа шагов, измерителем величины активности для вычисления величины жизненной активности или измерителем величины физической нагрузки для вычисления числа шагов и величины жизненной активности. Устройство определения движения тела может содержать средство вывода, например дисплейное средство и средство связи. Сигнал ускорения или определенные данные движения тела могут выводиться средством вывода.
В соответствии с настоящим изобретением возможно определение закрепления или раскрепления закрепляемой рабочей части, и движение тела может определяться в режиме, соответствующем состоянию после закрепления или раскрепления. Следовательно, степени свободы режима использования, относящегося к используемой форме закрепления, можно усовершенствовать, и режим можно переключать соответственно каждому режиму использования, с повышением, тем самым, точности измерения.
В одном аспекте настоящего изобретения участок закрепления/раскрепления может содержать ударную рабочую часть, с которой сталкивается одна часть закрепляемой рабочей части при закреплении или раскреплении закрепляемой рабочей части, и процедура определения закрепления/раскрепления может быть сконфигурирована с возможностью определения изменения ускорения, которое представляется в данных ускорения, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью.
Ударная рабочая часть может быть выполнена с соответствующим местом, которое может сталкиваться, например выступом, отверстием, канавкой или стенкой, с которыми сталкивается одна часть закрепляемой рабочей части, и выполнена посредством формирования в одно целое с корпусом основного блока устройства или посредством надежного закрепления отдельного элемента.
Одна часть закрепляемой рабочей части может быть выполнена с соответствующим местом, которое может сталкиваться, например выступом, отверстием, канавкой или стенкой, с которыми сталкивается ударная рабочая часть, и может быть выполнена посредством формирования в одно целое с корпусом основного блока устройства или посредством надежного закрепления отдельного элемента.
В соответствии с данным аспектом изменение ускорения, которое не происходит во время физической нагрузки живого организма, например ходьбы, бега, маха руками или жизненной активности, может формироваться при закреплении или раскреплении основного блока устройства и закрепляемой рабочей части, так что средство определения ускорения может точно определять закрепление или раскрепление.
В другом аспекте настоящего изобретения множество участков закрепления/раскрепления может соответственно располагаться в соответствии с каждым из множества типов закрепляемых рабочих частей.
Множество участков закрепления/раскрепления, соответственно расположенных в соответствии с каждым из множества типов закрепляемых рабочих частей, может быть выполнено в такой конфигурации, что место закрепления или раскрепления отличается в зависимости от различных типов закрепляемых рабочих частей, например выполнено в конфигурации такой направляющей, как рейка или канавка, в которых направление закрепления/раскрепления является различным, выполнено в конфигурации с расположением, параллельным одному и тому же направлению закрепления/раскрепления, и с отличием по числу и схемам расположения ударных рабочих частей.
В соответствии с данным режимом можно легко определять тип закрепляемой рабочей части, которую закрепляют или раскрепляют.
В еще одном аспекте настоящего изобретения процедура определения закрепления/раскрепления сконфигурирована с возможностью определения типа закрепленной или раскрепленной закрепляемой рабочей части по направлению изменения ускорения, которое возникает, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью.
Следовательно, тип закрепляемой рабочей части, которую закрепляют или раскрепляют, можно точно определить по направлению изменения ускорения.
В еще одном ином аспекте настоящего изобретения участку закрепления/раскрепления можно придавать конфигурацию путем изменения числа ударных рабочих частей в зависимости от типа соответствующей закрепляемой рабочей части, и процедура определения закрепления/раскрепления может быть сконфигурирована с возможностью определения типа закрепленной или раскрепленной закрепляемой рабочей части по числу изменений ускорения, которые возникают, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью.
Следовательно, тип закрепляемой рабочей части, которую закрепляют или раскрепляют, можно точно определить по числу столкновений. В частности, тип закрепленной или раскрепленной закрепляемой рабочей части можно более точно определить по направлению изменения ускорения и числу столкновений путем сочетания с конфигурацией определения типа закрепленной или раскрепленной закрепляемой рабочей части по направлению изменения ускорения, которое возникает, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью.
В соответствии с настоящим изобретением можно обеспечить устройство определения движения тела, содержащее средство определения ускорения для определения ускорения, запоминающее средство для хранения данных, вычислительное средство для выполнения процедуры вычисления движения тела по вычислению движения тела живого организма на основании данных ускорения, определенных средством определения ускорения, и дисплейное средство для отображения результата вычисления, при этом устройство определения движения тела содержит множество участков закрепления/раскрепления для обеспечения возможности закрепления закрепляемой рабочей части, подлежащей закреплению на живом организме или предмете, связанном с живым организмом, на основном блоке устройства или раскрепления от него, в зависимости от типа закрепляемой рабочей части, причем вычислительное средство выполнено с возможностью выполнения процедуры определения закрепления/раскрепления по определению закрепления или раскрепления закрепляемой рабочей части по отношению к участку закрепления/раскрепления и типа закрепляемой рабочей части на основании изменения ускорения, которое представляется данными ускорения, при закреплении рабочей части на участке закрепления/раскрепления или при раскреплении от него и выполнения процедуры вычисления движения тела на основании определенного закрепления/раскрепления и типа, при переключении в режим, соответствующий типу закрепленной закрепляемой рабочей части; и дисплейное средство выполнено с возможностью отображения экрана, соответствующего режиму.
Экран, соответствующий режиму, может быть экраном, соответствующим режиму, содержащему экран, показывающий режим закрепления на поясе, экран, показывающий режим закрепления на руке, или экраном, показывающим режим ношения в кармане.
В соответствии с настоящим изобретением пользователь может легко определять режим, который является текущим режимом.
В одном аспекте настоящего изобретения устройство определения движения тела для определения движения тела живого организма может содержать участок закрепления/раскрепления для обеспечения возможности закрепления закрепляемой рабочей части, подлежащей закреплению на живом организме или предмете, связанном с живым организмом, на основном блоке устройства или раскрепления от него, при этом участок закрепления/раскрепления содержит направляющую для сдвига или поворота закрепляемой рабочей части, когда закрепляемая рабочая часть закреплена на основном блоке устройства или раскреплена от него, и ударный участок, с которым одна часть закрепляемой рабочей части сталкивается при закреплении и раскреплении закрепляемой рабочей части вдоль направляющей.
Направляющая может быть выполнена в конфигурации с элементом для регулирования сдвига или поворота при закреплении или раскреплении закрепляемой рабочей части, например рейкой, канавкой, резьбой или винтовой канавкой.
В соответствии с настоящим изобретением можно задавать перемещение основного блока устройства относительно закрепляемой рабочей части во время закрепления или раскрепления и можно облегчить определение закрепления или раскрепления.
В соответствии с настоящим изобретением можно обеспечить устройство ввода, содержащее средство определения ускорения для определения ускорения, вычислительное средство для выполнения вычисления на основании данных ускорения, определенных средством определения ускорения, и корпус для вмещения средства определения ускорения и вычислительного средства, при этом корпус содержит ударную рабочую часть, подлежащую удару при столкновении, и вычислительное средство сконфигурировано с возможностью определения данных ускорения при ударе, которые представляют изменение ускорения при ударе, нанесенном по ударной рабочей части, на основании данных ускорения, определения содержательной информации о нанесенном ударе из данных ускорения и выполнения процедуры определения входной информации по определению информации, вводимой содержательной информацией об ударе.
Содержательная информация об ударе может быть, по меньшей мере, чем-то одним из направления, числа раз, интервала и интенсивности удара.
Введенная информация может быть подходящей информацией, например информацией о переключении режима для переключения режимов или входной командной информацией, указывающей предварительно заданную входную команду. Устройство ввода может содержать средство вывода (дисплейное средство, средство связи и т.п.) для вывода найденной входной информации.
Данные ударного ускорения могут быть данными ускорения, полученными из изменения ускорения, которое возникает, когда по ударной рабочей части наносится удар. Следовательно, данные ударного ускорения и данные нормального ускорения, указывающие на изменение ускорения, которое происходит в результате таких операций, как колебание, перемещение или поворот всего устройства ввода, одновременно присутствуют в данных ускорения, определенных средством определения ускорения.
В соответствии с настоящим изобретением входная информация может быть определена из удара по ударной рабочей части. В частности, если устройство ввода предназначено для устройства определения движения тела, то кроме определения движения тела средством определения ускорения могут определяться другие входные данные, помимо данных определения движения тела.
В соответствии с настоящим изобретением можно обеспечить способ определения движения тела для определения движения тела живого организма на основании данных ускорения, указывающих на изменение ускорения, вызванное движением тела живого организма, при этом способ определения движения тела содержит этапы определения изменения ускорения, которое возникает при закреплении рабочей части на основном блоке устройства или при раскреплении от него, на основании данных ускорения, и определения движения тела на основании данных ускорения после закрепления или раскрепления, посредством процедуры определения движения тела для режима, соответствующего состоянию после закрепления или раскрепления.
Следовательно, закрепление или раскрепление закрепляемой рабочей части можно определять из данных ускорения, и движение тела можно определять в режиме, соответствующем состоянию закрепления или раскрепления закрепляемой рабочей части, на основании данных ускорения после закрепления или раскрепления.
Следовательно, отдельное устройство обработки информации (компьютер, портативный информационный терминал, сервер и т.п.) может получать данные ускорения из устройства, вмещающего устройство определения движения тела и содержащего средство определения ускорения и средство передачи данных, и движение тела может определяться в подобном устройстве обработки информации.
В данном случае применение возможно в различных формах, например сервер может получать данные ускорения и точно определять движение тела по данным ускорения, или инструктор, который дает рекомендации по физической нагрузке, может проверять движение тела, точно определенное устройством обработки информации, и давать советы пользователю, который выполняет физические упражнения.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ
В соответствии с настоящим изобретением можно определять форму закрепления, при которой имеет место использование, и движение тела можно определять в режиме, подходящем для определенной формы закрепления для совершенствования степеней свободы режима использования и повышения точности измерений. В частности, форма закрепления определяется посредством сочетания аппаратной конфигурации участка закрепления/раскрепления и программной процедуры, так что форма закрепления может быть надежно определена с использованием простой конфигурации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - вид в перспективе с пространственным разделением компонентов измерителя величины физической нагрузки, при наблюдении со стороны передней поверхности.
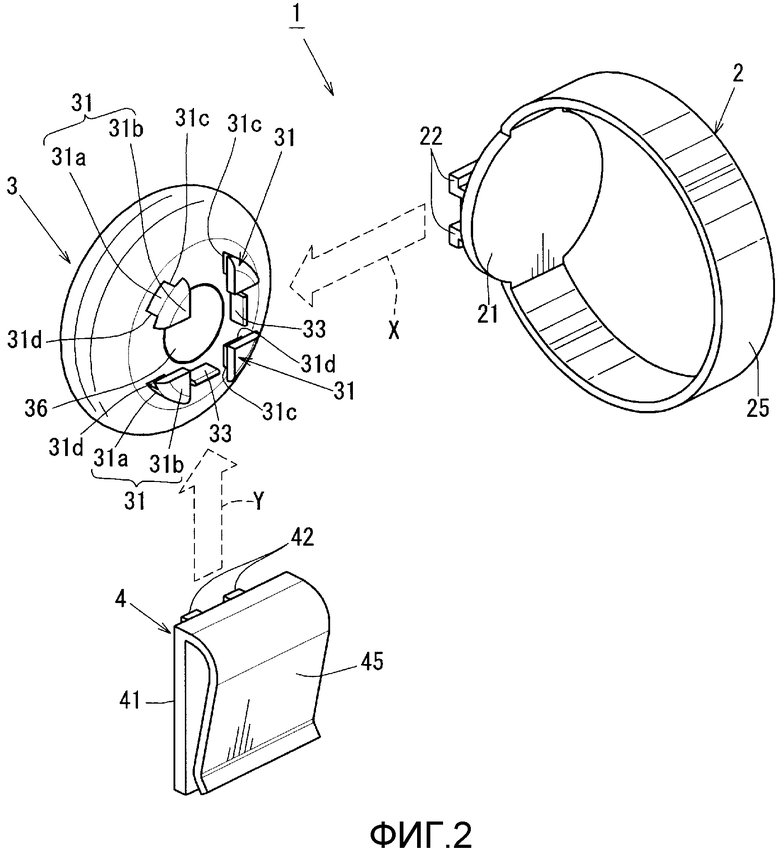
Фиг. 2 - вид в перспективе с пространственным разделением компонентов измерителя величины физической нагрузки, при наблюдении со стороны задней поверхности.
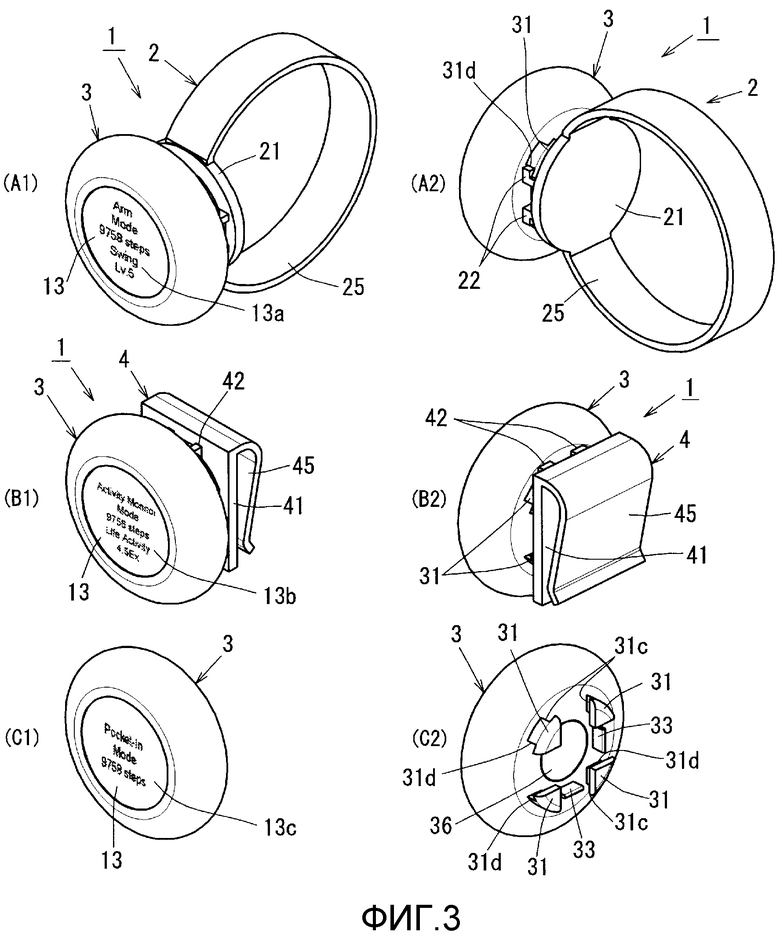
Фиг. 3(A1)-(C2) - пояснительные виды для описания каждого состояния измерителя величины физической нагрузки с использованием перспективных видов.
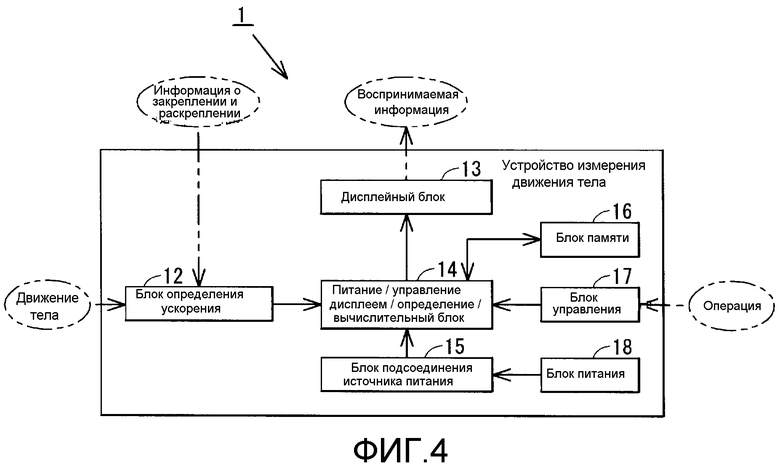
Фиг. 4 - блок-схема, представляющая конфигурацию измерителя величины физической нагрузки.
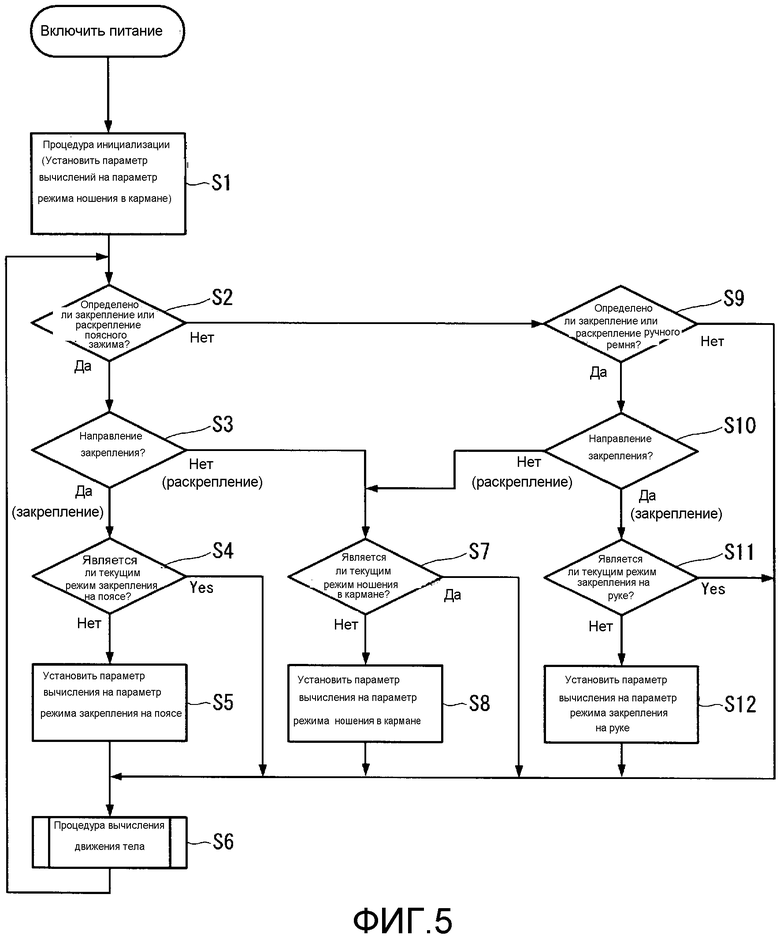
Фиг. 5 - блок-схема последовательности операций общей программы.
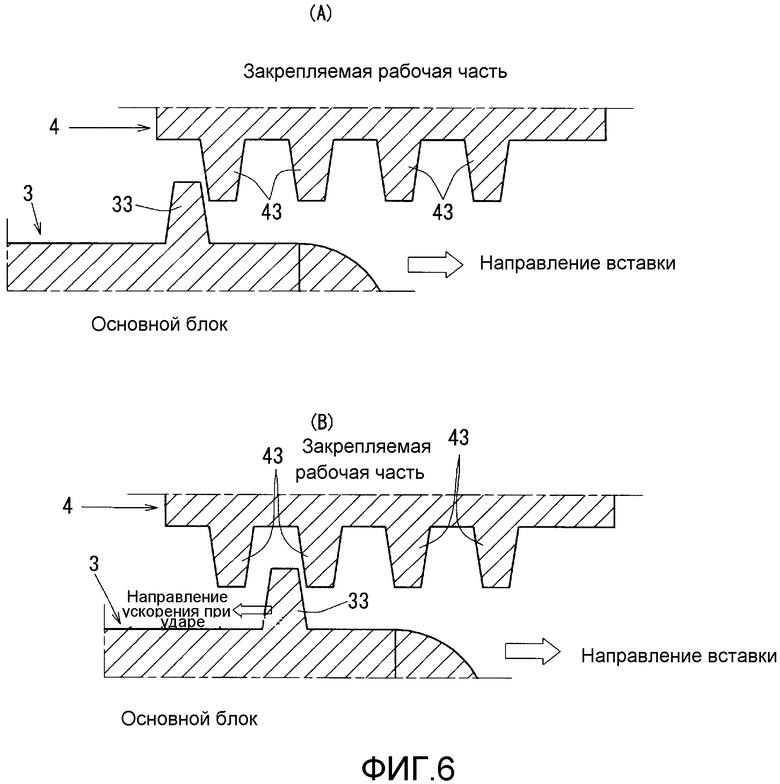
Фиг. 6(A) и (B) - пояснительные виды для описания закрепления и раскрепления закрепляемой рабочей части с использованием увеличенных сечений.
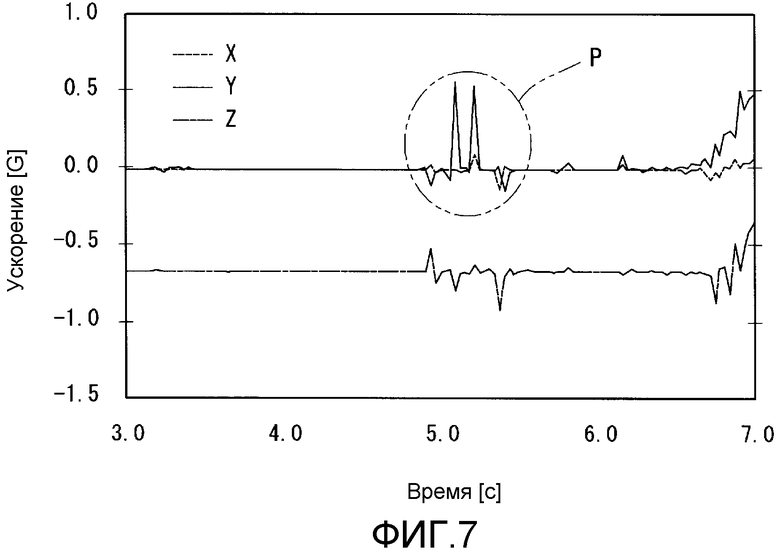
Фиг. 7 - график, представляющий форму сигнала данных ускорения.
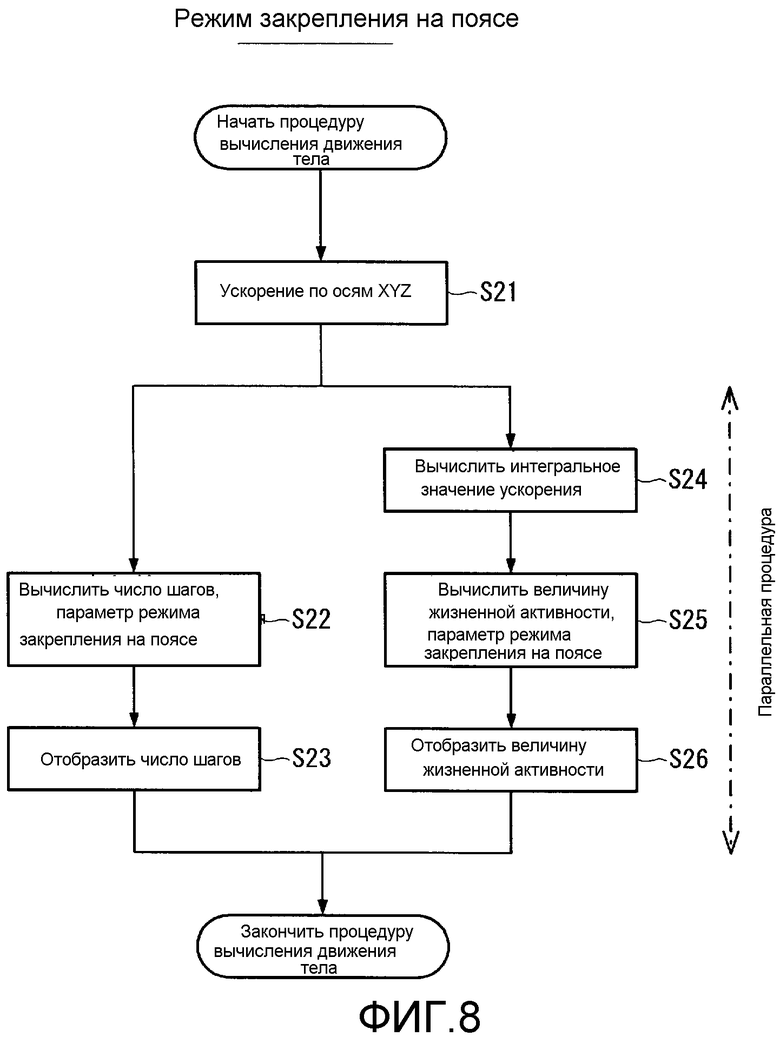
Фиг. 8 - блок-схема последовательности операций программы определения движения тела, при закреплении на поясе.
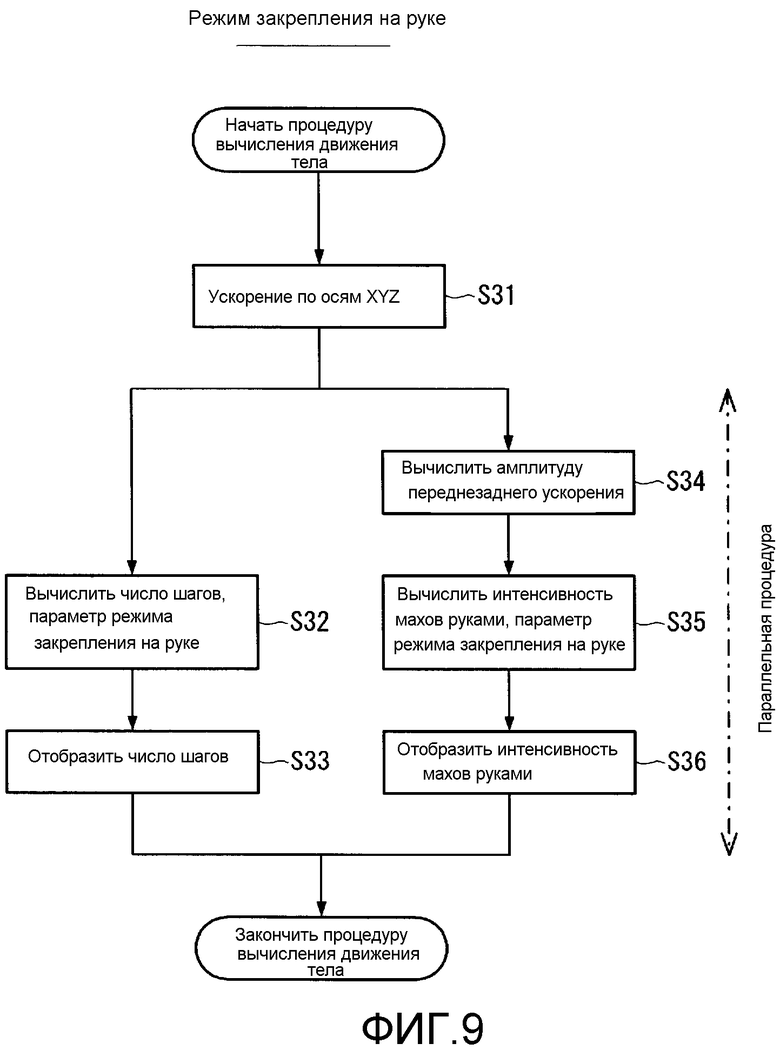
Фиг. 9 - блок-схема последовательности операций программы определения движения тела, при закреплении на руке.
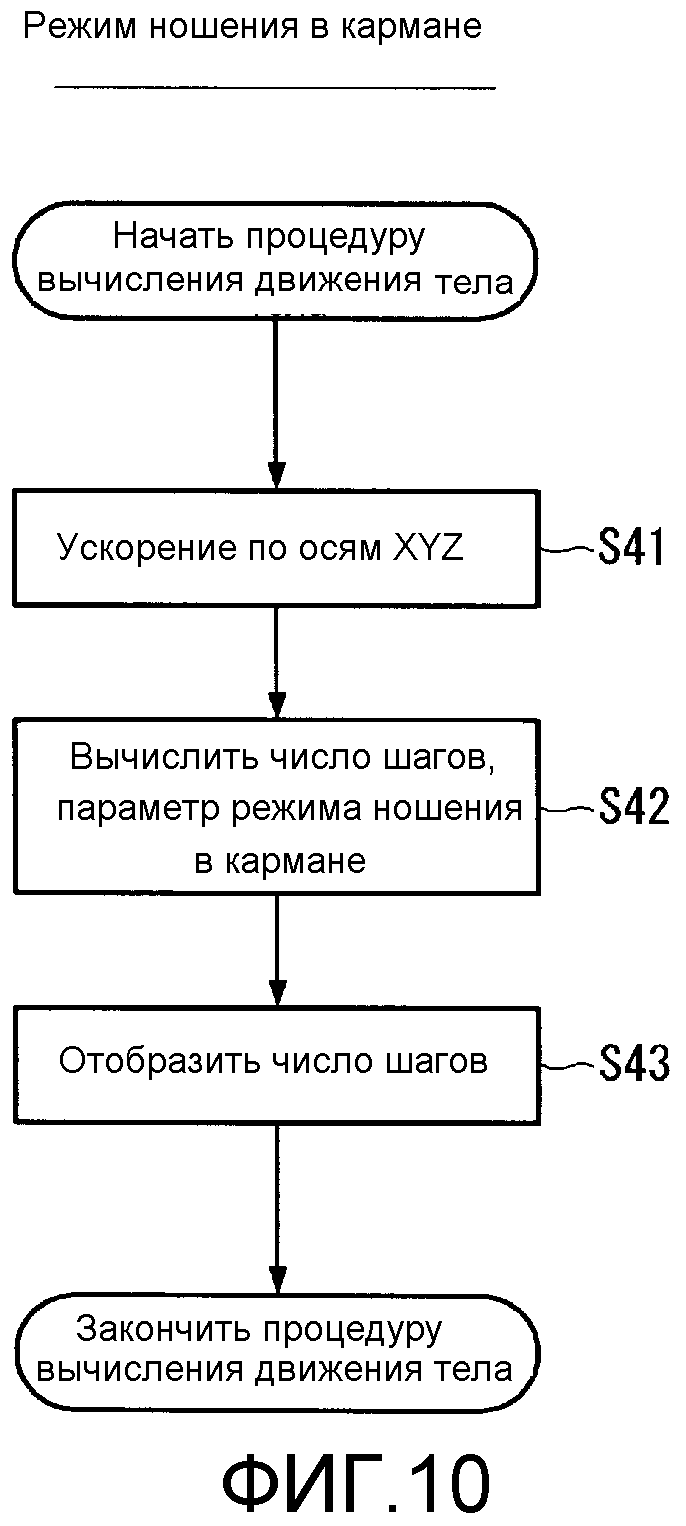
Фиг. 10 - блок-схема последовательности операций программы определения движения тела, при ношении в кармане.
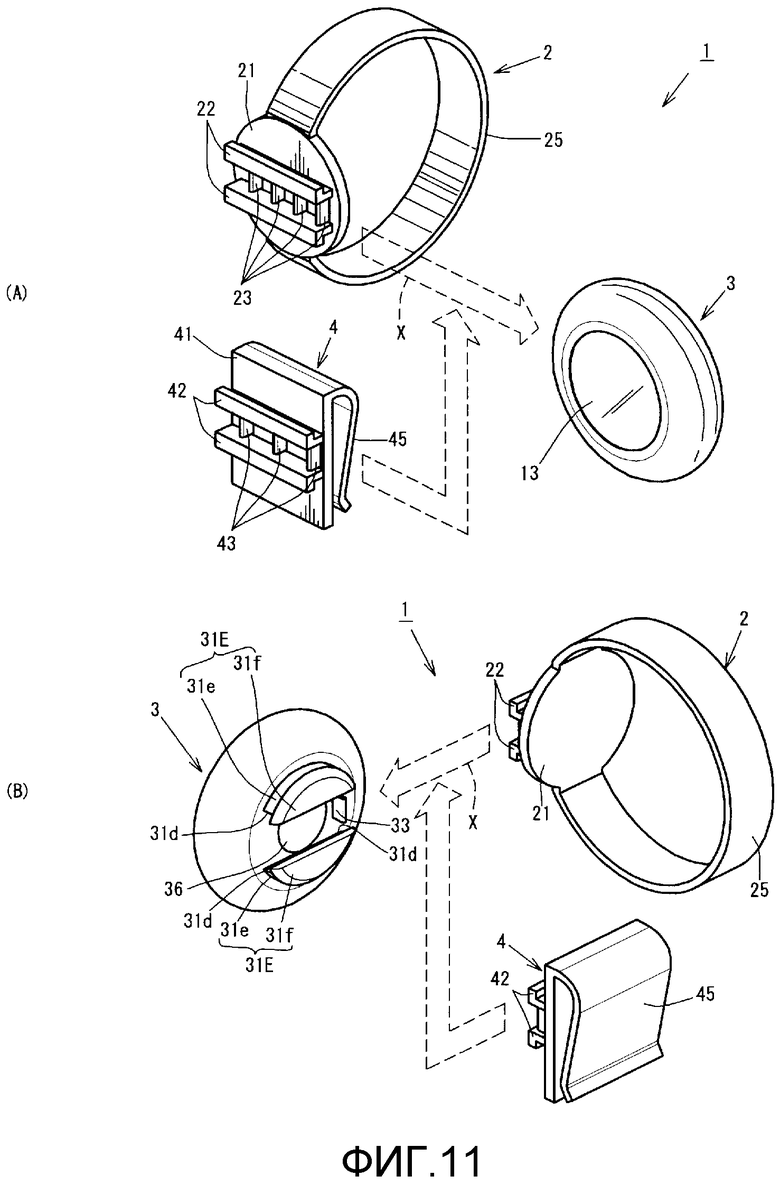
Фиг. 11(A) и (B) - пояснительные виды для описания другой конфигурации с использованием перспективных изображений.
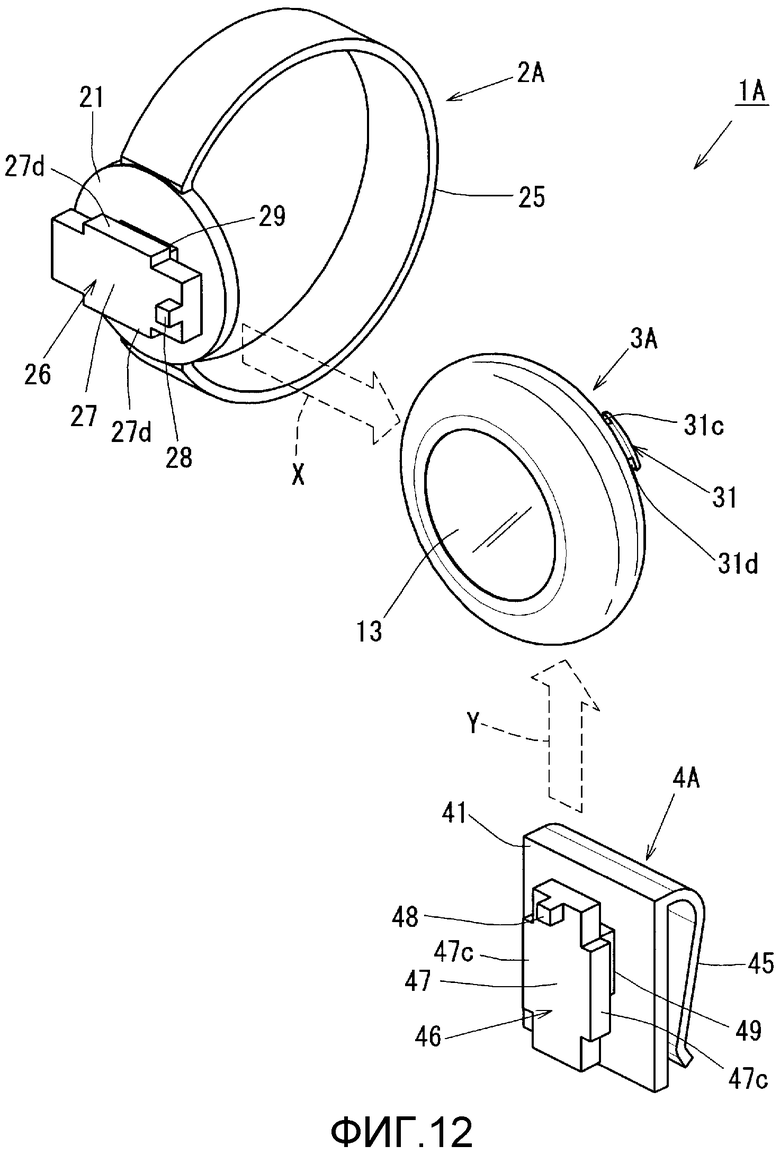
Фиг. 12 - вид в перспективе с пространственным разделением компонентов измерителя величины физической нагрузки в соответствии со вторым примером, при наблюдении со стороны передней поверхности.
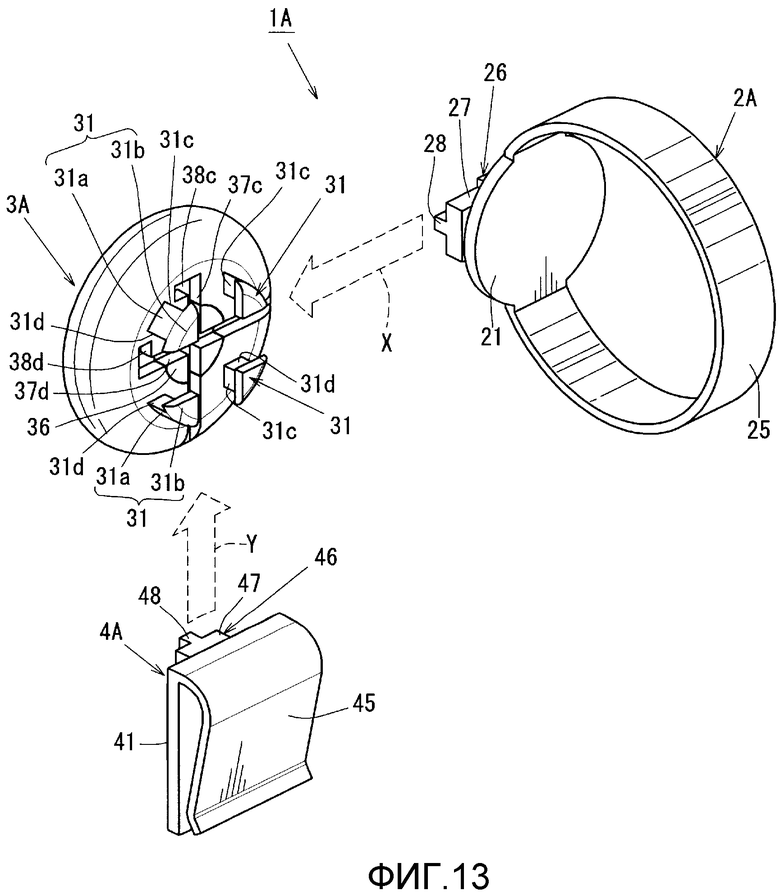
Фиг. 13 - вид в перспективе с пространственным разделением компонентов измерителя величины физической нагрузки в соответствии со вторым примером, при наблюдении со стороны задней поверхности.
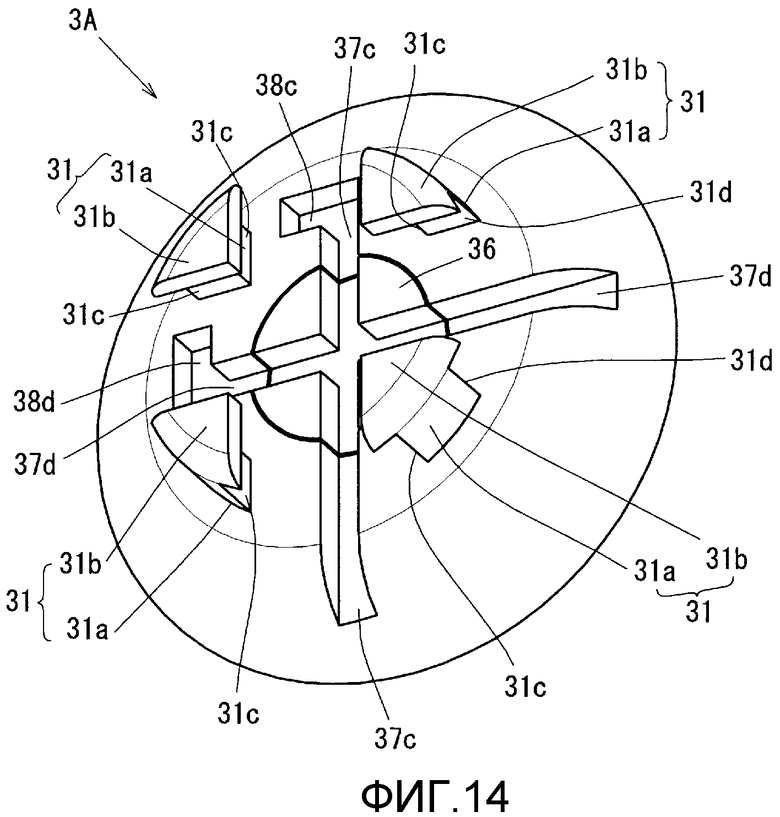
Фиг. 14 - вид в перспективе основного блока измерителя величины физической нагрузки в соответствии со вторым примером, при наблюдении со стороны задней поверхности.
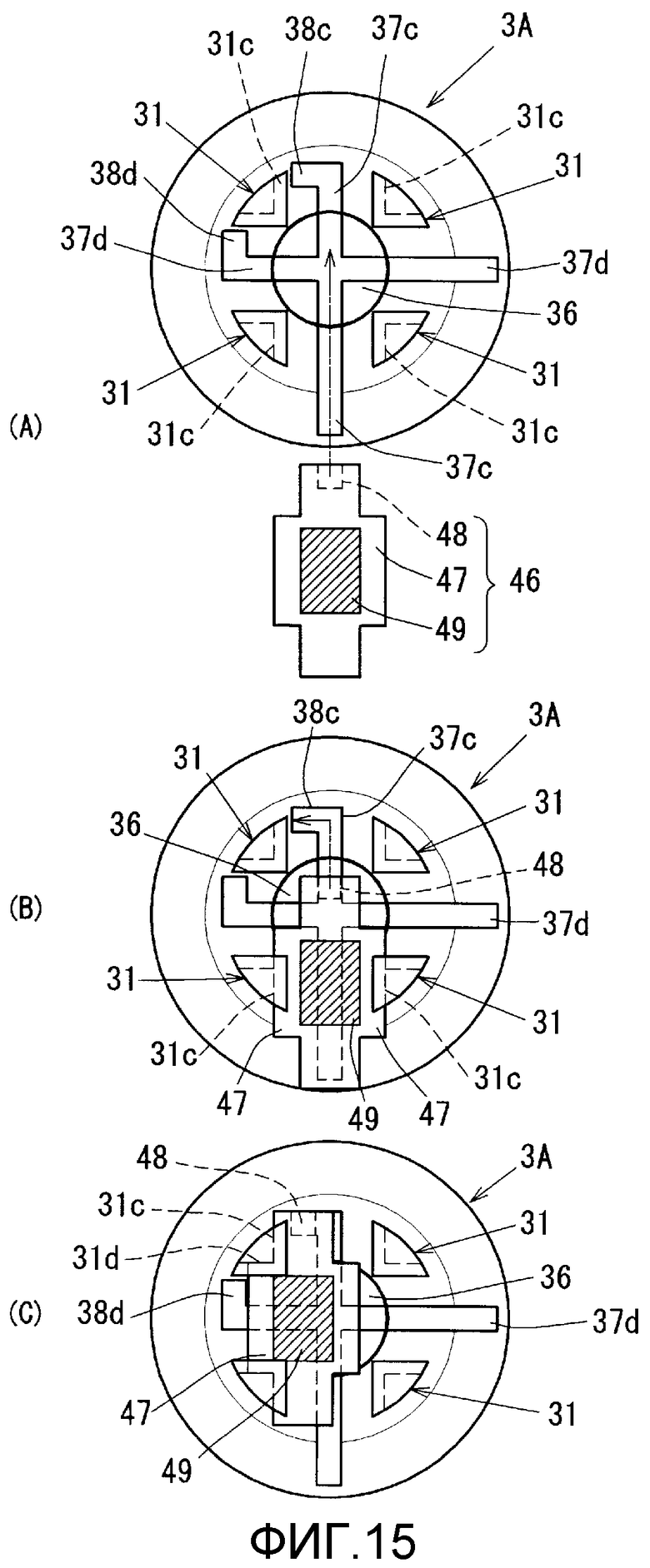
Фиг. 15(A) - (C) - пояснительные виды для описания операции закрепления и раскрепления закрепляемой рабочей части типа зажима в соответствии со вторым примером.
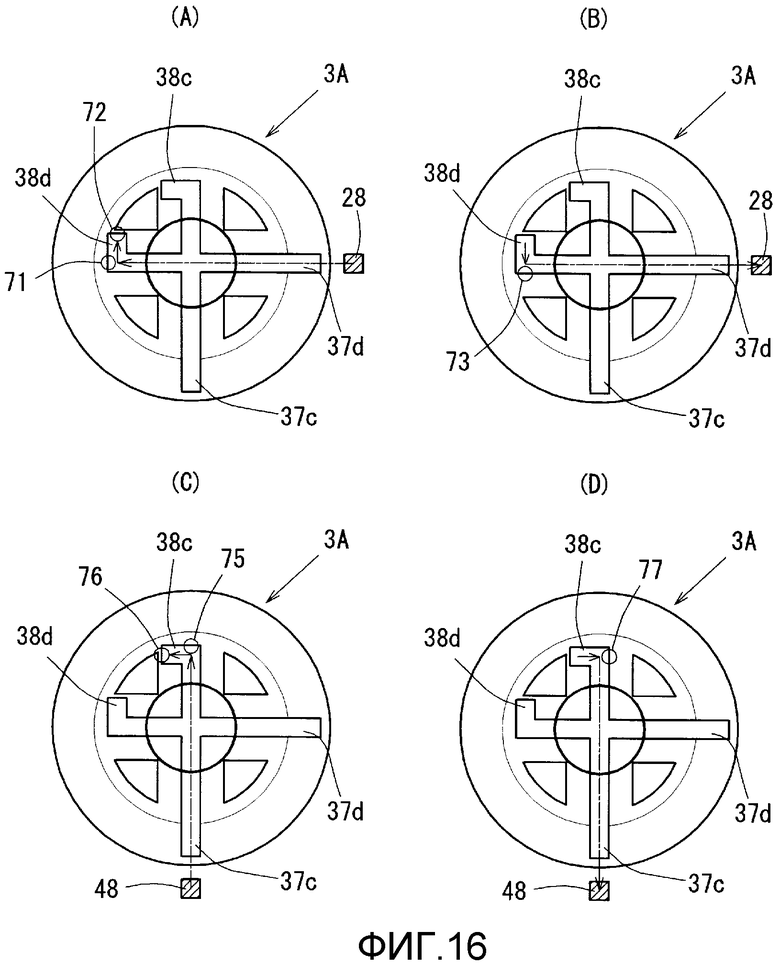
Фиг. 16(A)-(D) - пояснительные виды для описания операции закрепления и раскрепления закрепляемой рабочей части типа ремня в соответствии со вторым примером.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведено описание одного варианта осуществления настоящего изобретения со ссылкой на чертежи.
Первый пример
Далее, в первом примере приведено описание измерителя величины физической нагрузки, соответствующего трем режимам, т.е. режиму закрепления на руке для использования в состоянии закрепления на руке, режиму закрепления на поясе для использования в состоянии закрепления на поясе и режиму ношения в кармане для использования в состоянии размещения в кармане.
На фиг. 1 представлен вид в перспективе с пространственным разделением компонентов измерителя 1 величины физической нагрузки, при наблюдении со стороны передней поверхности, на фиг. 2 представлен вид в перспективе с пространственным разделением компонентов измерителя 1 величины физической нагрузки, при наблюдении со стороны задней поверхности, и на фиг. 3(A1)-(C2) представлены пояснительные виды для описания каждого состояния измерителя 1 величины физической нагрузки с использованием перспективных видов.
Измеритель 1 величины физической нагрузки выполнен в конфигурации с основным блоком 3 измерителя величины физической нагрузки и закрепляемой рабочей частью 2 типа ремня, а также закрепляемой рабочей частью 4 типа зажима, закрепляемой на основном блоке 3 измерителя величины физической нагрузки и раскрепляемой от него.
В показанном примере основной блок 3 измерителя величины физической нагрузки выполнен, по существу, в форме толстого диска, при этом дисплейный блок 13 расположен на передней поверхности, как показано на фиг. 1, четыре направляющих 31 закрепления/раскрепления и два ударных выступа 33 и одна задняя крышка 36 расположены на задней поверхности, как показано на фиг. 2.
Направляющие 31 закрепления/раскрепления одинаково расположены в четырех зонах, в положениях, равноотстоящих от центра тыльной поверхности основного блока 3 измерителя величины физической нагрузки, и все имеют одинаковую форму. Каждая направляющая 31 закрепления/раскрепления имеет форму, по существу, двухступенчатой треугольной призмы, у которой внешний периферический размер дистальной торцовой части 31b больше, чем внешний периферический размер базисной торцовой части 31a, закрепленного к тыльной поверхности основного блока 3 измерителя величины физической нагрузки. Поэтому пространство между дистальной торцовой частью 31b и тыльной поверхностью основного блока 3 измерителя величины физической нагрузки выполняет функцию направляющего паза 31c под зажим и направляющего паза 31d под ремень на боковой поверхности базисной торцовой части 31a.
Одно пространственное положение направляющих пазов 31c, 31c под зажим и одно пространственное положение направляющих пазов 31d, 31d под ремень содержат каждое ударный выступ 33, 33 для зажима и для ремня.
Задняя крышка 36 является открываемой/закрываемой крышкой для вмещения батареи и расположена в середине задней поверхности основного блока 3 измерителя величины физической нагрузки. Заднюю крышку 36 нельзя открыть, если закрепляемая рабочая часть 2 типа ремня и закрепляемая рабочая часть 4 типа зажима закреплены на основном блоке 3 измерителя величины физической нагрузки и, тем самым, закрывают основной блок 3 измерителя величины физической нагрузки, и можно открыть только в случае, если закрепляемая рабочая часть 2 типа ремня и закрепляемая рабочая часть 4 типа зажима раскреплены от основного блока 3 измерителя величины физической нагрузки. Поэтому при замене батареи основной блок 3 измерителя величины физической нагрузки должен быть в отделенном состоянии и не закреплен на закрепляемой рабочей части (2, 4).
Закрепляемая рабочая часть 2 типа ремня выполнена в конфигурации с кольцеобразным ременным участком 25 для закрепления на руке пользователя и установочным участком 21, расположенным на одной части ременного участка 25, для закрепления и раскрепления основного блока 3 измерителя величины физической нагрузки на внешней стороне.
Как показано на фиг. 1, установочный участок 21 содержит направляющие рейки 22, 22, выполненные в конфигурации из двух параллельных реек на поверхности внешней стороны, и множество выступающих ребер 23, проходящих между направляющими рейками 22, 22, расположено в виде нескольких ступенек в направлении закрепления (направлении по стрелке X).
Ребро 23 имеет форму стержня или форму пластины, которые расположены под прямым углом к направлению закрепления/раскрепления основного блока 3 измерителя величины физической нагрузки по направляющей рейке 22 и параллельны противоположным поверхностям основного блока 3 измерителя величины физической нагрузки и установочного участка 21. Множество ребер 23 расположено в пределах расстояния перемещения, на котором направляющая рейка 22 входит в зацепление с направляющим пазом 31d под ремень основного блока 3 измерителя величины физической нагрузки и перемещается посредством скольжения во время закрепления или раскрепления. Следовательно, ребро 23 выполняет функцию ударной рабочей части на стороне закрепляемой рабочей части, и ударный выступ 33, выполняющий функцию ударной рабочей части на стороне основного блока, расположенной в основном блоке 3 измерителя величины физической нагрузки, сталкивается с множеством ребер 23 во время скользящего перемещения. Две направляющих рейки 22 и множество ребер 23 образуют форму лестничного типа.
Закрепляемая рабочая часть 4 типа зажима выполнена в конфигурации с установочным участком 41 для закрепления и раскрепления основного блока 3 измерителя величины физической нагрузки и зажимным участком 45 для вставки ремня, брюк, юбки и подобного элемента пользователя со стороны тыльной поверхности установочного участка 41.
Как показано на фиг. 1, установочный участок 41 содержит направляющие рейки 42, 42, выполненные в конфигурации из двух параллельных реек на поверхности внешней стороны, и множество выступающих ребер 43, проходящих между направляющими рейками 42, 42, расположено в виде нескольких ступенек в направлении закрепления (направлении по стрелке Y).
Ребро 43 имеет форму стержня или форму пластины, которые расположены под прямым углом к направлению закрепления/раскрепления основного блока 3 измерителя величины физической нагрузки по направляющей рейке 42 и параллельны противоположным поверхностям основного блока 3 измерителя величины физической нагрузки и установочного участка 41. Множество ребер 43 расположено в пределах расстояния перемещения, на котором направляющая рейка 42 входит в зацепление с направляющим пазом 31c под зажим основного блока 3 измерителя величины физической нагрузки и перемещается посредством скольжения во время закрепления или раскрепления. Следовательно, ребро 43 выполняет функцию ударной рабочей части на стороне закрепляемой рабочей части, и ударный выступ 33 основного блока 3 измерителя величины физической нагрузки сталкивается с множеством ребер 43 во время скользящего перемещения. Две направляющих рейки 42 и множество ребер 43 образуют форму лестничного типа.
В соответствии с приведенной конфигурацией основной блок 3 измерителя величины физической нагрузки может находиться в трех режимах, т.е. использования в состоянии закрепления на руке, при закреплении закрепляемой рабочей части 2 типа ремня, как показано на фиг. 3(A1) и (A2), использования в состоянии закрепления на поясе, при закреплении закрепляемой рабочей части 4 типа зажима, как показано на фиг. 3(B1) и (B2), или использования с укладкой в карман, без закрепления закрепляемой рабочей части 2 типа ремня или закрепляемой рабочей части 4 типа зажима, как показано на фиг. 3(C1) и (C2).
На фиг. 4 приведена блок-схема, представляющая конфигурацию измерителя 1 величины физической нагрузки.
Измеритель 1 величины физической нагрузки содержит блок 12 определения ускорения, дисплейный блок 13, вычислительный блок 14, блок 15 подсоединения источника питания, блок 16 памяти, блок 17 управления и блок 18 питания и сформирован в такой размер, который может помещаться в ладони нормального человека для портативности.
Блок 12 определения ускорения является датчиком для определения ускорения колебания, формируемого при ходьбе, движении тела и т.п. пользователя, использующего измеритель 1 величины физической нагрузки, и передает сигнал определения в вычислительный блок 14. Блок 12 определения ускорения сконфигурирован из трехмерного датчика ускорения для определения ускорения по трем ортогональным направлениям. Блок 12 определения ускорения расположен в основном блоке 3 измерителя величины физической нагрузки таким образом, что три направления, подлежащие определению, точно совмещены с переднезадним направлением, лево-правым направлением и направлением вверх-вниз основного блока 3 измерителя величины физической нагрузки. Поэтому каждая составляющая ускорения в переднезаднем направлении, лево-правом направлении и направлении вверх-вниз может определяться легко и точно. Кроме того, направляющий паз 31d под ремень (см. фиг. 2) сформирован так, чтобы сдвигаться параллельно лево-правому направлению, и направляющий паз 31c под зажим (см. фиг. 2) сформирован так, чтобы сдвигаться параллельно направлению вверх-вниз, так что можно также точно определять закрепление и раскрепление закрепляемой рабочей части 2 типа ремня и закрепляемой рабочей части 4 типа зажима.
Дисплейный блок 13 сконфигурирован из дисплейного устройства, например жидкокристаллического устройства, и отображает информацию в соответствии с сигналом управления дисплеем из вычислительного блока 14. Отображаемая информация может быть информацией, имеющей отношение к величине физической нагрузки, например числу шагов, величине жизненной активности, интенсивности махов руками и текущему режиму.
Вычислительный блок 14 получает питание из блока 18 питания через блок 15 подсоединения источника питания и выполняет получение (определение) сигнала определения, переданного из блока 12 определения ускорения и блока 17 управления, и питание (подачу питания), а также управление операциями (управление отображением) дисплейного блока 13 и блока 16 памяти. Вычислительный блок 14 выполняет также процедуру вычисления относительно данных критерия ходьбы и данных критерия одного шага, хранимых в блоке 16 памяти по сигналу определения, переданному из блока 12 определения ускорения.
Блок 16 памяти хранит необходимые программу и данные, например данные ускорения, то есть сигнал определения, определенный блоком 12 определения ускорения, общую программу для определения закрепления или раскрепления закрепляемой рабочей части 2 типа ремня и закрепляемой рабочей части 4 типа зажима на основании данных ускорения и переключения режимов измерения, программу определения движения тела, при закреплении на руке, исполняемую, когда закреплена закрепляемая рабочая часть 2 типа ремня, программу определения движения тела, при закреплении на поясе, исполняемую, когда закреплена закрепляемая рабочая часть 4 типа зажима, программу определения движения тела, при ношении в кармане, когда не закреплена ни закрепляемая рабочая часть 2 типа ремня, ни закрепляемая рабочая часть 4 типа зажима, параметр режима закрепления на руке, используемый в программе определения движения тела, при закреплении на руке, параметр режима закрепления на поясе, используемый в программе определения движения тела, при закреплении на поясе, параметр режима ношения в кармане, используемый в программе определения движения тела, при ношении в кармане, и вычисленное число шагов, а также величину активности, отличающейся от ходьбы.
Блок 17 управления получает соответствующие оперативные входные данные, например операцию ввода пользовательской информации, содержащей массу и длину шага, дату и время операции ввода для установки времени и операцию переключения содержания дисплея для переключения содержания дисплея на различные виды содержания, например число шагов, расход калорий и расстояние ходьбы, и передает сигнал оперативных входных данных в вычислительный блок 14.
Блок питания 18 сконфигурирован из подходящего источника питания, который можно свободно носить, например перезаряжаемой батареи или не подлежащей перезарядке батареи.
На фиг. 5 представлена блок-схема последовательности операций выполняемых вычислительным блоком 14 измерителя 1 величины физической нагрузки в соответствии с общей программой, хранящейся в блоке 16 памяти.
Вычислительный блок 14 исполняет процедуру инициализации в ответ на включение питания (закрепление батареи) (этап S1). В ходе процедуры инициализации выполняется также процедура установки параметра вычислений на параметр режима ношения в кармане. После того, как процедура инициализации завершается, вычислительный блок 14 выполняет различные процедуры (этапы S2-S12) с данными ускорения, определенными блоком 12 определения ускорения.
Вычислительный блок 14 определяет наличие закрепления или раскрепления закрепляемой рабочей части 4 зажима на основании данных ускорения, определенных блоком 12 определения ускорения (этап S2).
Наличие закрепления или раскрепления закрепляемой рабочей части 4 типа зажима определяется по изменению ускорения, которое происходит, когда ребра 43 закрепляемой рабочей части 4 типа зажима сталкиваются с ударным выступом 33 основного блока 3 измерителя величины физической нагрузки, когда закрепляемую рабочую часть 4 типа зажима закрепляют на основном блоке 3 измерителя величины физической нагрузки или раскрепляют от него.
В частности, например, при закреплении закрепляемой рабочей части 4 типа зажима, если закрепляемая рабочая часть 4 типа зажима и основной блок 3 измерителя величины физической нагрузки перемещаются скольжением, как показано на фиг. 6(A), то ударный выступ 33 основного блока 3 измерителя величины физической нагрузки переходит через ребро 43 и сталкивается при этом с ребром 43 закрепляемой рабочей части 4 типа зажима, как показано на фиг. 6(B). При переходе и при этом соударении сигнал P остроконечной формы (форма сигнала, при которой интенсивность в пределах предварительно заданного диапазона проявляется в течение предварительно заданного времени), направленный только в одну сторону (в положительном направлении в приведенном примере) по направлению Y (направление вверх и вниз основного блока 3 измерителя величины физической нагрузки), появляется соответственно числу столкновений ударного выступа 33 с ребром 43, как показано на графике фиг. 7. Сигнал остроконечной формы, который направлен только в одну положительную или отрицательную сторону, является формой сигнала, которая не появляется при нормальной ходьбе, жизненной активности или махе рукой, и понятно, что данная форма сигнала возникает в результате закрепления и раскрепления, а не физического упражнения. Таким образом, при определении данной формы волны вычислительный блок 14 может определить закрепление или раскрепление закрепляемой рабочей части 4 типа зажима.
Когда определяется закрепление или раскрепление закрепляемой рабочей части 4 типа зажима (этап S2: Да), вычислительный блок 14 определяет, происходит ли или нет данное закрепление или раскрепление в направлении закрепления (положительном направлении) (этап S3). Вычислительный блок 14, который определяет направление закрепления, определяет закрепление, если форма сигнала P, определенная блоком 12 определения ускорения, является положительной (направленной вверх) в направлении Y (направлении вверх-вниз), и раскрепление, если форма сигнала P является отрицательной (направленной вниз).
При определении направления закрепления (закрепление) (этап S3: Да) вычислительный блок 14 определяет, является или нет текущий режим режимом закрепления на поясе (этап S4).
При определении, что текущий режим не является режимом закрепления на поясе (этап S4: Нет), вычислительный блок 14 устанавливает параметр вычислений на параметр режима закрепления на поясе (этап S5). В данном случае вычислительный блок 14 переключает программу для вычисления движений тела на программу определения движения тела, при закреплении на поясе, и полностью переходит в режим закрепления на поясе. На этапах S4 и S5 режим переводится в режим закрепления на поясе сразу же после того, как закрепляемую рабочую часть 4 типа зажима закрепляют на основном блоке 3 измерителя величины физической нагрузки.
Вычислительный блок 14 применяет установленный параметр и выполняет процедуру вычисления движений тела по включенной программе определения движений тела (этап S6), возвращает процедуру на этап S2 и повторяет процедуру. Подробные сведения о процедуре вычисления движений тела приведены далее в настоящем описании для каждого режима.
При определении на этапе S4, что текущий режим является режимом закрепления на поясе (этап S4: Да), вычислительный блок 14 выполняет процедуру вычисления движений тела (этап S6) в своем текущем состоянии.
Если закрепление или раскрепление происходит не в направлении закрепления (положительном направлении) на этапе S3 (этап S3: Нет), то определяется раскрепление, и тогда вычислительный блок 14 определяет, является или нет текущий режим режимом ношения в кармане (этап S7).
При определении, что текущий режим не является режимом ношения в кармане (этап S7: Нет), вычислительный блок 14 устанавливает параметр вычислений на параметр режима ношения в кармане, переключает программу определения движений тела на программу определения движений тела при ношении в кармане (этап S8) и переводит процедуру на этап S6.
При определении, что текущий режим является режимом ношения в кармане (этап S7: Да), вычислительный блок 14 переводит процедуру на этап S6. На этапах S7 и S8 режим немедленно возвращается в режим ношения в кармане, когда закрепляемую рабочую часть 4 типа зажима раскрепляют от основного блока 3 измерителя величины физической нагрузки.
Если на этапе S2 не определяется закрепление или раскрепление закрепляемой рабочей части 4 типа зажима (этап S2: Нет), то вычислительный блок 14 выполняет определение закрепления или раскрепления закрепляемой рабочей части 2 типа ремня (этап S9). Данное закрепление или раскрепление определяется по тому, появляется ли или нет вышеописанный сигнал P остроконечной формы (см. фиг. 7) по направлению X (лево-правому направлению).
Если закрепление или раскрепление не определяется (этап S9: Нет), то необходимость в переключении режима отсутствует, и, следовательно, вычислительный блок 14 переводит процедуру на процедуру вычисления движений тела (этап S6).
Если закрепление или раскрепление закрепляемой рабочей части 2 типа ремня определяется (этап S9: Да), то вычислительный блок 14 определяет, происходит или нет данное закрепление или раскрепление в направлении закрепления (положительном направлении) (этап S10). Вычислительный блок 14, который выполняет определение относительно направления закрепления, определяет закрепление, если форма сигнала P, определенная блоком 12 определения ускорения, является положительной (направление влево на виде сзади) в направлении X (направлении вверх-вниз), и раскрепление, если форма сигнала P является отрицательной (направление вправо на виде сзади).
Так как определение указывает на раскрепление, если закрепление или раскрепление происходит не в направлении закрепления (положительном направлении) (этап S10: Нет), то вычислительный блок 14 выполняет этапы S7-S8, переключает режим в режим ношения в кармане и переводит процедуру на процедуру вычисления движений тела (этап S6).
Если закрепление или раскрепление происходит в направлении закрепления (закрепление) (этап S10: Да), то вычислительный блок 13 определяет, является или нет текущий режим режимом закрепления на руке (этап S11).
При определении, что текущий режим не является режимом закрепления на руке (этап S11: Нет), вычислительный блок 14 устанавливает параметр вычислений на параметр режима закрепления на руке (этап S12) и переводит процедуру на процедуру вычисления движений тела (этап S6).
При установке параметра режима закрепления на руке вычислительный блок 14 также переключает программу вычисления движений тела на программу вычисления движений тела, при закреплении на руке, и полностью переходит в режим закрепления на руке. На этапах S11 и S12 режим переключается в режим закрепления на руке сразу после того, как закрепляемую рабочую часть 2 типа ремня закрепляют на основном блоке 3 измерителя величины физической нагрузки.
На фиг. 8 представлена блок-схема последовательности операций работы вычислительного блока 14 для выполнения процедуры вычисления движений тела в соответствии с программой определения движения тела, при закреплении на поясе, в режиме закрепления на поясе.
Вычислительный блок 14 получает данные ускорения для ускорения по осям XYZ, определенного в блоке 12 определения трехмерного ускорения (этап S21). Затем вычислительный блок 14 параллельно выполняет процедуру подсчета числа шагов (этапы S22 и S23) и процедуру вычисления величины жизненной активности (этапы S24-S26).
Вычислительный блок 14, в ходе выполнения процедуры подсчета числа шагов, вычисляет число шагов по данным ускорения (этап S22). В данном случае вычислительный блок 14 вычисляет число шагов с использованием параметра режима закрепления на поясе. Число шагов можно определять точно, так как число шагов можно подсчитывать с использованием параметра, подходящего для состояния закрепления на поясе.
Вычислительный блок 14 отображает вычисленное число шагов на дисплейном блоке 13 в виде экрана 13b отображения режима закрепления на поясе (этап S23) и завершает процедуру вычисления движений тела. Экран 13b отображения режима закрепления на поясе, в данном случае, представляет «Activity Monitor Mode» («Режим контроля активности») для указания режима закрепления на поясе, «9758 steps» («9758 шагов») для указания суммарного числа шагов на сегодняшний день, «Life Activity 4.5 Ex» («Нагрузка 4,5 жизненной активности») для указания суммарной величины жизненной активности на сегодняшний день и т.п., как показано на фиг. 3(B1). Поскольку число шагов подсчитывается на данный момент времени, то уже полученная суммарная величина жизненной активности на сегодняшний день отображается в существующем виде в качестве величины жизненной активности.
Вычислительный блок 14, в ходе выполнения процедуры вычисления величины жизненной активности, вычисляет интегральное значение ускорения (этап S24) и вычисляет величину жизненной активности (этап S25). В данном случае вычислительный блок 14 вычисляет величину жизненной активности с использованием параметра режима закрепления на поясе. Величина жизненной активности может быть вычислена точно, так как величину жизненной активности можно вычислять с параметром, подходящим для состояния закрепления на поясе.
Вычислительный блок 14 отображает вычисленный величину жизненной активности на дисплейном блоке 13 (этап S26) и завершает процедуру вычисления движений тела. В данном случае дисплей идентичен дисплею, описанному на этапе S23.
Процедура определения, относятся или нет данные к ходьбе, может выполняться после этапа S21. Определение, относятся или нет данные к ходьбе, выполняется посредством определения, находятся ли локальное максимальное значение и локальное минимальное значение данных ускорения в пределах предварительно заданного диапазона пороговых значений, появляются в период предварительно заданного диапазона или продолжаются в течение, по меньшей мере, предварительно заданного числа раз. После определения выполняется процедура подсчета числа шагов, если определение дает ходьбу, и выполняется процедура вычисления величины жизненной активности, если определяется не число шагов. При настройке конфигурации подобным образом вычислительный блок 14 может селективно выполнять любую из процедуры подсчета числа шагов и процедуры вычисления величины жизненной активности.
На фиг. 9 показана блок-схема последовательности операций, представляющая работу вычислительного блока 14 для выполнения программы вычисления движений тела в соответствии с программой определения движений тела, при закреплении на руке, в режиме закрепления на руке.
Вычислительный блок 14 получает данные ускорения для ускорения по осям XYZ, определенного в блоке 12 определения трехмерного ускорения (этап S31). Затем параллельно выполняются как процедура подсчета числа шагов (этапы S32 и S33), так и процедура вычисления интенсивности махов руками (этапы S34-S36), и как число шагов, так и интенсивность махов руками выводятся из одних данных ускорения. Процедура подсчета числа шагов (этапы S32 и S33) и процедура вычисления интенсивности махов руками (этапы S34 - S36) не ограничены параллельным выполнением и могут выполняться последовательно. Даже если процедуры выполняются последовательно, цель может быть достигнута посредством вычисления как числа шагов, так и интенсивности махов руками на основании одних данных ускорения.
Вычислительный блок 14, в ходе выполнения процедуры подсчета числа шагов, вычисляет число шагов по данным ускорения (этап S32). В данном случае вычислительный блок 14 вычисляет число шагов с применением параметра режима закрепления на руке. Число шагов может быть определено точно, так как число шагов можно подсчитывать с использованием параметра, подходящего для состояния закрепления на руке.
Вычислительный блок 14 отображает вычисленное число шагов на дисплейном блоке 13 в виде экрана 13a отображения режима закрепления на руке (этап S33) и завершает процедуру вычисления движений тела. Экран 13a отображения режима закрепления на руке, в данном случае, представляет «Arm Mode» («Режим закрепления на руке») для указания режима закрепления на руке, «9758 steps» («9758 шагов») для указания суммарного числа шагов на сегодняшний день, «Swing Lv.5» («Интенсивность маха Lv.5») для указания текущей интенсивности махов руками и т.п., как показано на фиг. 3(A1).
Вычислительный блок 14, в ходе выполнения процедуры вычисления интенсивности махов руками, вычисляет амплитуду ускорения в переднезаднем направлении (направлении Z) (этап S34) и вычисляет интенсивность махов руками (этап S35). В данном случае вычислительный блок 14 вычисляет интенсивность махов руками с использованием параметра режима закрепления на руке. Интенсивность махов руками может быть вычислена точно, так как интенсивность махов руками можно вычислять с использованием параметра, подходящего для состояния закрепления на руке.
Вычислительный блок 14 отображает вычисленную интенсивность махов руками на дисплейном блоке 13 (этап S36) и завершает процедуру вычисления интенсивности махов руками. В данном случае дисплей может быть идентичен дисплею, описанному на этапе S33.
На фиг. 10 представлена блок-схема последовательности операций, показывающая работу вычислительного блока 14 для выполнения процедуры вычисления движений тела в соответствии с программой определения движений тела, при ношении в кармане, в режиме ношения в кармане.
Вычислительный блок 14 получает данные ускорения для ускорения по осям XYZ, определенного в блоке 12 определения трехмерного ускорения (этап S41). Затем выполняется процедура подсчета числа шагов (этапы S42 и S43), и число шагов получают из одних данных ускорения.
Вычислительный блок 14, в ходе выполнения процедуры подсчета числа шагов, вычисляет число шагов по данным ускорения (этап S42). В данном случае вычислительный блок 14 вычисляет число шагов с применением параметра режима ношения в кармане. Число шагов может быть определено точно, так как число шагов можно подсчитывать с использованием параметра, подходящего для состояния размещения в кармане.
Вычислительный блок 14 отображает вычисленное число шагов на дисплейном блоке 13 в виде экрана 13c отображения режима ношения в кармане (этап S43) и завершает процедуру вычисления движений тела. Как показано на фиг. 3(C1), экран 13c отображения режима ношения в кармане, в данном случае, может представлять «Pocket-in Mode» («Режим ношения в кармане») для указания режима ношения в кармане, «9758 steps» («9758 шагов») для указания суммарного числа шагов на сегодняшний день и т.п.
В соответствии с вышеописанными конфигурацией и работой измеритель 1 величины физической нагрузки может определять форму закрепления, при которой данный измеритель планируется использовать, и может определять движение тела в режиме, подходящем для определенной формы закрепления. Таким образом, возможно решение конфликтующих проблем усовершенствования степеней свободы режима применения и повышения точности измерения.
Поскольку переключение режима происходит, когда закрепляемую рабочую часть (закрепляемую рабочую часть 2 типа ремня, закрепляемую рабочую часть 4 типа зажима) закрепляют или раскрепляют, то режим может переключаться автоматически в связи с изменением формы закрепления, без выполнения пользователем ручного ввода операции переключения режима или подобной операции. Следовательно, можно исключить вариант невыполнения правильного переключения режима, когда забывается ручной ввод операции, и, поэтому, возможно надежное переключение режима в режим, соответствующий форме закрепления. Тем самым, можно надежно и точно определять число шагов, величину активности и интенсивность махов руками.
Измеритель 1 величины физической нагрузки можно изготовить недорогим и компактным, так как переключение формы закрепления можно определять с использованием блока 12 определения ускорения для измерения величины физической нагрузки, например числа шагов, величины активности и интенсивности махов руками.
Если переключение режимов определяется устройством определения, отличающимся от блока 12 определения ускорения, то измерение величины физической нагрузки может выполняться без правильного переключения режима только тогда, когда другое устройство определения выходит из строя, что сопряжено с таким недостатком, как незаметность выхода из строя. Однако данный недостаток можно предупредить, так как измеритель 1 величины физической нагрузки также определяет переключение режима с помощью блока 12 определения ускорения.
Основной блок 3 измерителя величины физической нагрузки отдельно содержит направляющий паз 31d под ремень для закрепляемой рабочей части 2 типа ремня и направляющий паз 31c под зажим для закрепляемой рабочей части 4 типа зажима, чтобы легко и надежно определять, которая из закрепляемой рабочей части 2 типа ремня и закрепляемой рабочей части 4 типа зажима прикрепляется или раскрепляется.
Измеритель 1 величины физической нагрузки может определять направление изменения ускорения, которое происходит, когда ударный выступ 33 и ребра 23, 43 сталкиваются, и поэтому можно определять тип закрепляемой или раскрепляемой закрепляемой рабочей части. Поэтому можно надежно определять, какой тип из закрепляемой рабочей части 2 типа ремня и закрепляемой рабочей части 4 типа зажима закрепляют или раскрепляют.
Определение надежного закрепления или раскрепления выполнимо в простой конфигурации, так как ударный выступ 33 и ребра 23, 43 приходят в режим столкновения, при закреплении или раскреплении закрепляемой рабочей части 2 типа ремня или закрепляемой рабочей части 4 типа зажима с основным блоком 3 измерителя величины физической нагрузки.
Поскольку нажимная кнопка для ручной операции ввода с целью выполнения переключения режима посредством ручного ввода не требуется, то можно избежать снижения водостойкости.
Так как характеристический сигнал получается в результате столкновения ударного выступа 33 и ребер 23, 43, то можно снизить вычислительную нагрузку на программно-реализуемую процедуру, необходимую для определения закрепления или раскрепления, и можно повысить точность определения.
Поскольку аппаратная конфигурация для использования столкновения при определении закрепления или раскрепления выполнена с помощью небольшого выступа или подобного конструктивного элемента, то общую форму измерителя 1 величины физической нагрузки можно миниатюризировать.
Следовательно, измеритель 1 величины физической нагрузки может обеспечить различные результаты посредством сочетания аппаратной конфигурации, использующей ударный выступ 33 и ребра 23, 43, и программно-реализуемой процедуры определения изменения ускорения, которое происходит при столкновении.
В вышеописанном примере обеспечено одинаковое число ребер 23, 43, но число ребер 23 и ребер 43 может быть разным. В данном случае блоком 12 определения ускорения определяется число изменений ускорения, которое имеет место, когда ребра 32, 43 сталкиваются с ударным выступом 33, и, в зависимости от данного числа, может выполняться определение, сталкиваются ли ребра 23, при закреплении или раскреплении закрепляемой рабочей части 2 типа ремня, или сталкиваются ли ребра 43 при закреплении или раскреплении закрепляемой рабочей части 4 типа зажима. Кроме того, в данном случае можно надежно определять, является закрепленная или раскрепленная закрепляемая рабочая часть закрепляемой рабочей частью 2 типа ремня или закрепляемой рабочей частью 4 типа зажима.
Из направляющего паза 31c под зажим и направляющего паза 31d под ремень, показанных на фиг. 1 и 2, может быть расположен только один направляющий паз 31d под ремень, как показано на фиг. 11(A) и (B), и закрепляемую рабочую часть 2 типа ремня и закрепляемую рабочую часть 4 типа зажима можно закреплять или раскреплять в одном и том же месте.
В данном случае базисная торцовая часть 31e и дистальная торцовая часть 31f направляющей 31E закрепления/раскрепления сформированы по горизонтали и более длинными, чем базисная торцовая часть 31a и дистальная торцовая часть 31b вышеописанной направляющей 31 закрепления/раскрепления (см. фиг. 2), как показано на перспективном виде со стороны передней поверхности на фиг. 11(A) и перспективном виде со стороны задней поверхности на фиг. 11(B).
Ударный выступ 33 может находиться на основном блоке 3 измерителя величины физической нагрузки, и число ребер 23 (четыре в показанном примере), расположенных в закрепляемой рабочей части 2 типа ремня, и число ребер 43 (три в показанном примере), расположенных в закрепляемой рабочей части 4 типа зажима, может быть разным. В данном случае определение, которое из закрепляемой рабочей части 2 типа ремня и закрепляемой рабочей части 4 типа зажима прикрепляется или раскрепляется, может выполняться по числу столкновений между ударным выступом 33 и ребрами 23, 43, и определение, происходит ли закрепление или раскрепление, может выполняться по направлению удара, вызываемого столкновением.
Второй пример
Ниже приведено описание измерителя 1A величины физической нагрузки в соответствии со вторым примером с отличающейся конструкцией для определения закрепления или раскрепления.
На фиг. 12 представлен вид в перспективе с пространственным разделением компонентов измерителя 1A величины физической нагрузки, при наблюдении со стороны передней поверхности, на фиг. 13 представлен вид в перспективе с пространственным разделением компонентов измерителя 1A величины физической нагрузки, при наблюдении со стороны задней поверхности, и на фиг. 14 представлен увеличенный вид в перспективе основного блока 3A измерителя величины физической нагрузки, при наблюдении со стороны задней поверхности.
Измеритель 1A величины физической нагрузки выполнен в конфигурации с основным блоком 3A измерителя величины физической нагрузки и закрепляемой рабочей частью 2A типа ремня, а также закрепляемой рабочей частью 4A типа зажима, которые можно закреплять или раскреплять с основным блоком 3A измерителя величины физической нагрузки.
Как показано на фиг. 14, в основном блоке 3A измерителя величины физической нагрузки канавка 37d под ремень, удлиненная в левом-правом направлении, и канавка 37c под зажим, удлиненная в направлении вверх-вниз, расположены ортогонально на задней поверхности.
Канавка 37c под зажим продолжается в одну линию от нижнего края основного блока 3A измерителя величины физической нагрузки до верхнего края через центр. Верхний конец канавки 37c под зажим содержит канавку 38c фиксации, наклоненную под 90° в левую сторону на виде сзади и сообщающуюся с канавкой 37c под зажим. Канавка 37c под зажим и канавка 38c фиксации формируют L-образную канавку.
Канавка 37d под ремень продолжается в одну линию от правого края на виде сзади основного блока 3A измерителя величины физической нагрузки до левой стороны на виде сзади, через центр. Левый конец на виде сзади канавки 37d под ремень содержит канавку 38d фиксации, которая наклонена под 90° в верхнюю сторону и сообщается с канавкой 37d под ремень. Канавка 37d под ремень и канавка 38d фиксации формируют L-образную канавку.
Конфигурация основного блока 3A измерителя величины физической нагрузки является такой же, как в первом примере, и поэтому одинаковые составляющие элементы обозначены одинаковыми позициями, и их подробное описание далее не приводится.
Как показано на фиг. 12, закрепляемая рабочая часть 2A типа ремня содержит зацепляющий участок 26 закрепления/раскрепления на поверхности с внешней стороны установочного участка 21. Зацепляющий участок 26 закрепления/раскрепления выполнен в конфигурации с опорой 29 в форме четырехгранной призмы, к одной стороне которой неразъемно прикреплен центр установочного участка 21, фланцем 27, неразъемно прикрепленным к другой стороне опоры 29, и выступом 28, расположенным со стороны закрепляемой рабочей части, на поверхности с внешней стороны фланца 27.
Фланец 27 выполнен в форме пластины, имеющей постоянную толщину, с направляющими рейками 27d, 27d, удлиненными в направлении закрепления и раскрепления (направлении по стрелке X на фиг. 12) и расположенными как с верхней, так и с нижней сторон в направлении ширины относительно направления закрепления и раскрепления. Направляющие рейки 27d, 27d параллельны между собой и выполнены с возможностью направленного плавного скользящего перемещения в направляющих пазах 31d, 31d под ремень, показанных на фиг. 13. Длина каждой направляющей рейки 27d выполнена немного короче, чем длина промежутка между направляющими пазами 31c, 31c под зажим, и оба конца направляющей рейки 27d направляются направляющими пазами 31c, 31c под зажим для перемещения скольжением в направлении фиксации (в верхнюю сторону на фигуре).
Выступ 28 со стороны закрепляемой рабочей части расположен на одном конце фланца 27. Выступ 28 со стороны закрепляемой рабочей части выполнен немного меньше, чем ширина канавки 37d под ремень и канавки 38d фиксации, чтобы перемещаться в канавке 37d под ремень и в канавке 38d фиксации.
Опора 29 выполнена немного меньше, чем длина промежутка между дистальными торцовыми частями 31b, 31b направляющих 31 закрепления/раскрепления основного блока 3A измерителя величины физической нагрузки. Поэтому опора 29 может перемещаться между дистальными торцовыми частями 31b, 31b.
Другие элементы конфигурации закрепляемой рабочей части 2A типа ремня являются такими же, как в первом примере, и поэтому одинаковые составляющие элементы обозначены одинаковыми позициями, и их подробное описание далее не приводится.
Как показано на фиг. 12, закрепляемая рабочая часть 4A типа зажима содержит зацепляющий участок 46 закрепления/раскрепления на поверхности с внешней стороны установочного участка 41. Зацепляющий участок 46 закрепления/раскрепления выполнен в конфигурации с опорой 49 в форме четырехгранной призмы, к одной стороне которой неразъемно прикреплен центр установочного участка 41, фланцем 47, неразъемно прикрепленным к другой стороне опоры 49, и выступом 48, расположенным со стороны закрепляемой рабочей части, на поверхности с внешней стороны фланца 47.
Так как конфигурация зацепляющего участка 46 закрепления/раскрепления идентична по форме зацепляющему участку 26 закрепления/раскрепления вышеописанной закрепляемой рабочей части 2A типа ремня и расположена в закрепляемой рабочей части 4A типа зажима, при ориентации в направлении, повернутом на 90 градусов, то ее подробное описание далее не приводится.
Поскольку другие элементы конфигурации закрепляемой рабочей части 2A типа ремня являются такими же, как в первом примере, то одинаковые составляющие элементы обозначены одинаковыми позициями, и их подробное описание далее не приводится.
На фиг. 15(A)-(C) представлены пояснительные виды для описания операции закрепления/раскрепления закрепляемой рабочей части 4A типа зажима в составе измерителя 1A величины физической нагрузки, имеющего вышеописанную конфигурацию.
При закреплении закрепляемой рабочей части 4A типа зажима к основному блоку 3A измерителя величины физической нагрузки выступ 48 со стороны закрепляемой рабочей части устанавливает зацепляющий участок 46 закрепления/раскрепления так, чтобы сдвигаться в канавке 37c под зажим, как показано штрихпунктирной стрелкой на фиг. 15(A).
Как показано на фиг. 15(B), фланец 47 входит между направляющими пазами 31c под зажим в середине и затем устойчиво перемещается скольжением. В данном случае фланец 47 вкладывается между дистальной торцовой частью 31b и задней поверхностью основного блока 3A измерителя величины физической нагрузки для устойчивого перемещения скольжением.
При дальнейшем скользящем перемещении выступ 48 фланца 47 со стороны закрепляемой рабочей части сталкивается с верхним концом канавки 37c под зажим.
Когда фланец 47 сдвигают влево на виде сзади, как показано на фиг. 15(C), выступ 48 со стороны закрепляемой рабочей части перемещается скольжением в канавке 38c фиксации и сталкивается с левым концом канавки 38c фиксации на виде сзади. В данном случае направляющая рейка 47c фланца 47 с левой стороны на виде сзади входит в зацепление с направляющими пазами 31d, 31d под ремень, с которыми входит в зацепление направляющая рейка 27d фланца 27 закрепляемой рабочей части 2A типа ремня, и перемещается скольжением.
При раскреплении закрепленной закрепляемой рабочей части 4A типа зажима с основным блоком 3A измерителя величины физической нагрузки закрепляемую рабочую часть 4A типа зажима перемещают противоположно направлению при закреплении и затем раскрепляют. В данном случае выступ 48 со стороны закрепляемой рабочей части сталкивается с боковой стенкой канавки 37c под зажим, когда фланец 47 перемещают вправо на виде сзади, и, после этого, фланец 47 перемещают вниз для раскрепления.
Перемещение закрепления или раскрепления закрепляемой рабочей части 2A типа ремня с основным блоком 3A измерителя величины физической нагрузки отличается только направлением перемещения и, в остальном, содержит аналогичные операции.
При перемещении вышеописанным образом, закрепление и раскрепление закрепляемой рабочей части 2A типа ремня и закрепляемой рабочей части 4A типа зажима можно определять следующим образом.
Описание приведено ниже с использованием пояснительного вида, изображающего заднюю поверхность, на фиг. 16(A)-(D).
Как показано на фиг. 16(A), при закреплении закрепляемой рабочей части 2A типа ремня, выступ 28 со стороны закрепляемой рабочей части перемещается в канавке 37d под ремень до столкновения с местом 71 столкновения на левом конце на фигуре и дополнительно перемещается в канавке 38d фиксации до столкновения с местом 72 столкновения на верхнем конце на фигуре.
Следовательно, блок 12 определения ускорения может определять всего два столкновении: столкновение в левую сторону на фигуре (правую сторону, при наблюдении со стороны передней поверхности измерителя 1A величины физической нагрузки) и столкновение в верхнюю сторону, и поэтому можно распознать закрепление закрепляемой рабочей части 2A типа ремня.
Блок 12 определения ускорения может быть сконфигурирован с возможностью определения столкновения только в левую сторону и распознавания, что прикрепляется закрепляемая рабочая часть 2A типа ремня. В данном случае пороговое значение интенсивности столкновения для определения можно установить так, чтобы распознавать столкновение в месте 76 столкновения на левом конце на фигуре, при закреплении закрепляемой рабочей части 4A типа зажима, показанной на фиг. 16(C).
Канавка 38c фиксации, показанная на фиг. 16(C), может быть сформирована немного уже, чтобы выступ 28 входил в канавку 38c фиксации таким образом, чтобы столкновения в месте 76 столкновения не происходило. В данном случае можно применить конфигурацию распознавания закрепления закрепляемой рабочей части 2A типа ремня, если столкновение направлено в левую сторону на фигуре.
Как показано на фиг. 16(B), при закреплении закрепляемой рабочей части 2A типа ремня выступ 28 со стороны закрепляемой рабочей части перемещается в канавке 38d фиксации и сталкивается с местом 73 столкновения на нижнем конце на фигуре.
Следовательно, блок 12 определения ускорения может определять столкновение в нижнюю сторону на фигуре и, таким образом, может распознавать, что раскрепляют закрепляемую рабочую часть 2A типа ремня.
Как показано на фиг. 16(C), при закреплении закрепляемой рабочей части 4A типа зажима выступ 48 со стороны закрепляемой рабочей части перемещается в канавке 37c под зажим и сталкивается с местом 75 столкновения на верхнем конце на фигуре, а также перемещается в канавке 38c фиксации и сталкивается с местом 76 столкновения на левом конце на фигуре.
Следовательно, блок 12 определения ускорения может определять всего два столкновения: столкновение в верхнюю сторону и столкновение в левую сторону на фигуре (в правую сторону, при наблюдении со стороны передней поверхности измерителя 1A величины физической нагрузки), и поэтому можно распознать закрепление закрепляемой рабочей части 4A типа зажима.
Блок 12 определения ускорения может быть сконфигурирован с возможностью определения столкновения только в верхнюю сторону и распознавания, что прикрепляется закрепляемая рабочая часть 4A типа зажима. В данном случае пороговое значение интенсивности столкновения для определения можно установить так, чтобы распознавать столкновение в месте 72 столкновения на верхнем конце на фигуре, при закреплении закрепляемой рабочей части 2A типа ремня, показанной на фиг. 16(A).
Канавка 38d фиксации, показанная на фиг. 16(A), может быть сформирована немного уже, чтобы выступ 28 входил в канавку 38d фиксации таким образом, чтобы столкновения в месте 72 столкновения не происходило. В данном случае можно применить конфигурацию распознавания закрепления закрепляемой рабочей части 4A типа зажима, если столкновение направлено в верхнюю сторону на фигуре.
Как показано на фиг. 16(D), при закреплении закрепляемой рабочей части 4A типа зажима выступ 48 со стороны закрепляемой рабочей части перемещается в канавке 38c фиксации и сталкивается с местом 77 столкновения на левом конце на фигуре.
Следовательно, блок 12 определения ускорения может определять столкновение в правую сторону на фигуре (в левую сторону, при наблюдении со стороны передней поверхности измерителя 1A величины физической нагрузки) и может распознавать, что закреплена закрепляемая рабочая часть 4A типа зажима.
Поскольку остальные операции, кроме определения закрепления и раскрепления, являются такими же, как в первом примере, то их подробное описание далее не приводится. Иначе говоря, определение закрепления и раскрепления и определение, совершалось или нет действие в направлении закрепления, по этапам S2, S3, S9, S10, описанным в первом примере, изменены на вышеописанный способ определения, а другие этапы остались такими же, как в первом примере.
С использованием вышеописанных конфигурации и операций можно также получить те же самые результаты, как в первом примере. Во втором примере можно применить подходящую конфигурацию, например конфигурацию, в которой выступ 28, 48 со стороны закрепляемой рабочей части перемещается в канавке 38c фиксации или канавке 38d фиксации так, чтобы надежно устанавливаться и фиксироваться, с заполнением зазора, при закреплении закрепляемой рабочей части 2A типа ремня или закрепляемой рабочей части 4A типа зажима, или конфигурацию с установкой в подходящее профилированное место и фиксацией положения. Тем самым, можно заблокировать закрепляемую рабочую часть 2A типа ремня и закрепляемую рабочую часть 4A типа зажима от непреднамеренного закрепления от основного блока 3А измерителя величины физической нагрузки.
Во втором примере зацепляющие участки 26, 46 закрепления/раскрепления смещены под прямым углом 90°, но фланцы 27, 47 можно перемещать линейно, и только один из выступов 28, 48 со стороны закрепляемой рабочей части может перемещаться в правильном угловом направлении. В данном случае также возможно определение двух столкновений в разных направлениях во время закрепления и возможно определение одного столкновения во время раскрепления, и, следовательно, можно определять, которую из закрепляемой рабочей части 2A типа ремня или закрепляемой рабочей части 4A типа зажима закрепляют или раскрепляют, и что выполняется, закрепление или раскрепление.
Измерители 1, 1A величины физической активности, описанные в первом и втором примерах, могут содержать блок связи. Блок связи может быть сконфигурирован с помощью подходящего коммуникационного интерфейса, например проводной USB (универсальной последовательной шины) или беспроводного коммуникационного интерфейса Bluetooth (зарегистрированный товарный знак).
В таком случае можно осуществлять связь с устройством обработки информации, например персональным компьютером, мобильным телефоном или PDA (персональными цифровыми секретарями).
В данном случае блок 17 управления может быть сконфигурирован с возможностью выполнения операции передачи данных по передаче данных в отдельный терминал обработки информации, подсоединенный к блоку связи.
В первом и втором примерах обеспечены три режима: режим закрепления на поясе, режим закрепления на руке и режим ношения в кармане, но режим не ограничен приведенными режимами, и возможны другие режимы. В данном случае текущее состояние закрепления или раскрепления также можно надежно измерять посредством соотнесения соответствующего режима и определения закрепления/раскрепления.
В соответствии с конфигурацией настоящего изобретения и вышеописанным вариантом осуществления
закрепляемая рабочая часть в соответствии с настоящим изобретением соответствует закрепляемой рабочей части 2 типа ремня и закрепляемой рабочей части 4 типа зажима в соответствии с вариантом осуществления; и, аналогично,
устройство определения движения тела и основной блок устройства соответствуют основному блоку 3 измерителя величины физической нагрузки;
средство определения ускорения соответствует блоку 12 определения ускорения;
дисплейное средство соответствует дисплейному блоку 13;
экран, соответствующий режиму, соответствует экрану 13a отображения режима закрепления на руке, экрану 13b отображения режима закрепления на поясе и экрану 13c отображения режима ношения в кармане;
вычислительное средство соответствует вычислительному блоку 14;
запоминающее средство соответствует блоку 16 памяти;
одна часть закрепляемой рабочей части соответствует ребру 23, 43 и выступу 28, 48 со стороны закрепляемой рабочей части;
участок и направляющая закрепления/раскрепления соответствуют направляющей 31 закрепления/раскрепления;
ударная рабочая часть соответствует ударному выступу 33, канавке 37c под зажим и канавке 38c фиксации и канавке 37d под ремень и канавке 38d фиксации;
процедура определения закрепления/раскрепления соответствует этапам S2, S3, S9, S10;
процедура вычисления движения тела соответствует этапам S21-S26, S31-S36, S41-S43;
живой организм соответствует пользователю;
предмет, связанный с живым организмом, соответствует ремню, брюкам или юбке пользователя;
режим соответствует режиму закрепления на руке, режиму закрепления на поясе и режиму ношения в кармане; и
движение тела соответствует числу шагов, величине жизненной активности и интенсивности махов руками; но
настоящее изобретение не ограничено конфигурацией вышеописанного варианта осуществления, и возможно существование многих других вариантов осуществления.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение можно применять в измерителе величины физической нагрузки для определения величины физической нагрузки пользователя, например в педометре или измерителе величины жизненной активности.
ОПИСАНИЕ СИМВОЛИЧЕСКИХ ОБОЗНАЧЕНИЙ
2A - закрепляемая рабочая часть типа ремня
3A - основной блок измерителя величины физической нагрузки
4A - закрепляемая рабочая часть типа зажима
12 - блок определения ускорения
13 - дисплейный блок
13a - экран отображения режима закрепления на руке
13b - экран отображения режима закрепления на поясе
13c - экран отображения режима ношения в кармане
14 - вычислительный блок
16 - блок памяти
23, 43 - ребро
28, 48 - выступ на стороне закрепляемой рабочей части
31, 31E - направляющая закрепления/раскрепления
33 - ударный выступ
37c, 38c - канавка под зажим
37d, 38d - канавка фиксации.
Изобретение относится к средствам определения движения тела. Устройство содержит средство определения ускорения и вычислительное средство для вычисления движения тела на основании данных ускорения, участок закрепления/раскрепления для закрепления рабочей части на основном блоке устройства или раскрепления от него, причем вычислительное средство выполнено с возможностью выполнения процедуры определения закрепления/раскрепления на основании изменения ускорения, при закреплении закрепляемой рабочей части на участке закрепления/раскрепления или при раскреплении от него, и выполнения вычисления движения тела на основании определенного закрепления/раскрепления, при переключении в режим, соответствующий состоянию после закрепления/раскрепления. Во втором варианте выполнения устройства дополнительно имеется запоминающее средство для хранения данных и дисплейное средство для отображения результата вычисления, а также множество участков закрепления/раскрепления в зависимости от типа закрепляемой рабочей части, причем вычислительное средство выполнено также с возможностью определения типа закрепляемой рабочей части на основании изменения ускорения, и выполнения вычисления движения тела на основании определенного закрепления/раскрепления и типа, при переключении в режим, соответствующий типу закрепленной закрепляемой рабочей части. В третьем варианте участок закрепления/раскрепления содержит направляющую для сдвига или поворота закрепляемой рабочей части, когда закрепляемая рабочая часть закреплена на основном блоке устройства или раскреплена от него, и ударный участок, с которым одна часть закрепляемой рабочей части сталкивается при закреплении и раскреплении закрепляемой рабочей части вдоль направляющей. В четвертом варианте устройство имеет корпус для вмещения средства определения ускорения и вычислительного средства, при этом корпус содержит ударную рабочую часть, подлежащую удару при столкновении, а вычислительное средство сконфигурировано с возможностью определения данных ускорения при ударе, нанесенном по ударной рабочей части, и определения информации о нанесенном ударе из данных ускорения. В способе определения движения тела определяют изменение ускорения, которое возникает при закреплении рабочей части на основном блоке устройства или при раскреплении от него, на основании данных ускорения, и движение тела на основании данных ускорения после закрепления или раскрепления. Использование изобретения позволяет повысить точность измерения. 5 н. и 4 з.п. ф-лы, 16 ил.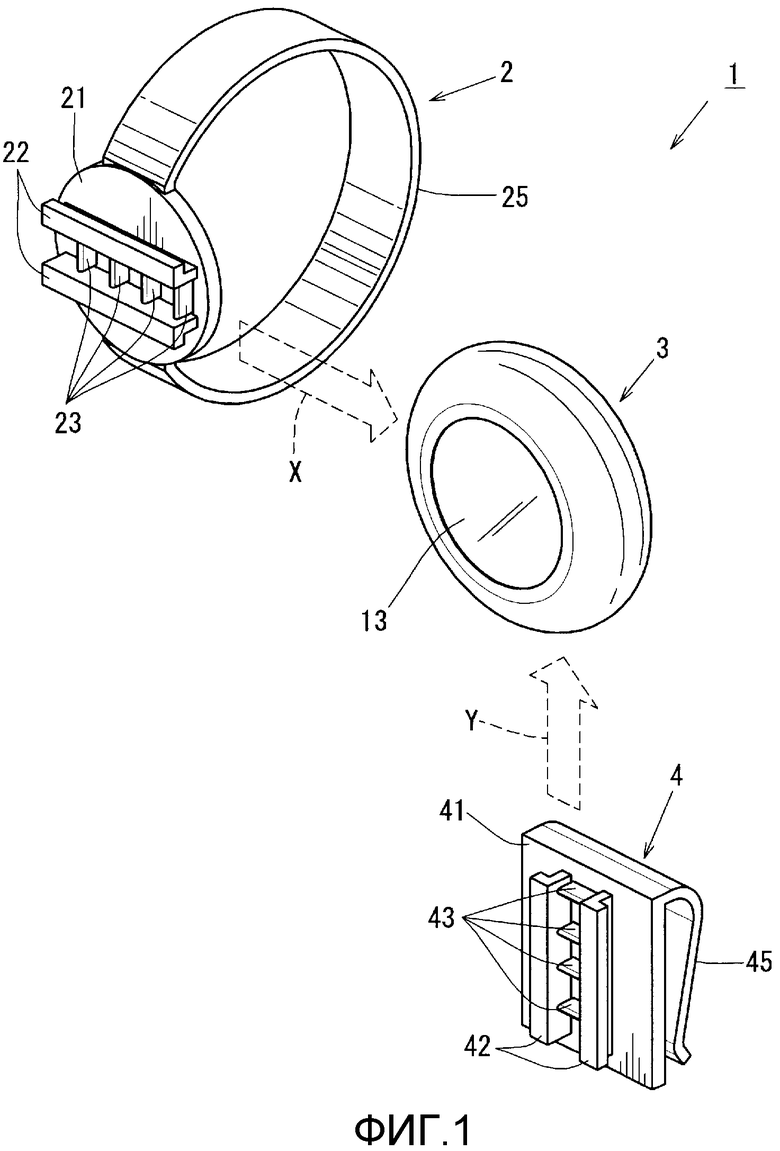
1. Устройство определения движения тела, содержащее:
средство определения ускорения для определения ускорения; и
вычислительное средство для выполнения процедуры вычисления движения тела по вычислению движения тела живого организма на основании данных ускорения, определенных средством определения ускорения, при этом устройство определения движения тела содержит:
участок закрепления/раскрепления для обеспечения возможности закрепления закрепляемой рабочей части, подлежащей закреплению на живом организме или предмете, связанном с живым организмом, на основном блоке устройства или раскрепления от него, причем
вычислительное средство выполнено с возможностью выполнения процедуры определения закрепления/раскрепления по определению закрепления или раскрепления на основании изменения ускорения, представляемого данными ускорения, при закреплении закрепляемой рабочей части на участке закрепления/раскрепления или при раскреплении от него, и выполнения процедуры вычисления движения тела на основании определенного закрепления/раскрепления, при переключении в режим, соответствующий состоянию после закрепления/раскрепления.
2. Устройство определения движения тела по п.1, в котором
участок закрепления/раскрепления содержит ударную рабочую часть, с которой сталкивается одна часть закрепляемой рабочей части при закреплении или раскреплении закрепляемой рабочей части; и
процедура определения закрепления/раскрепления сконфигурирована с возможностью определения изменения ускорения, которое возникает, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью, на основании данных ускорения.
3. Устройство определения движения тела по п.2, в котором
множество участков закрепления/раскрепления соответственно расположено в соответствии с каждым из множества типов закрепляемых рабочих частей.
4. Устройство определения движения тела по п.3, в котором
вычислительное средство выполнено с возможностью определения типа закрепленной или раскрепленной закрепляемой рабочей части по направлению изменения ускорения, которое возникает, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью.
5. Устройство определения движения тела по п.3, в котором
участок закрепления/раскрепления сконфигурирован путем изменения числа ударных рабочих частей в зависимости от типа соответствующей закрепляемой рабочей части; и
процедура определения закрепления/раскрепления сконфигурирована с возможностью определения типа закрепленной или раскрепленной закрепляемой рабочей части по числу изменений ускорения, которые определяются, когда одна часть закрепляемой рабочей части сталкивается с ударной рабочей частью.
6. Устройство определения движения тела, содержащее:
средство определения ускорения для определения ускорения;
запоминающее средство для хранения данных;
вычислительное средство для выполнения процедуры вычисления движения тела по вычислению движения тела живого организма на основании данных ускорения, определенных средством определения ускорения; и
дисплейное средство для отображения результата вычисления, при этом устройство определения движения тела содержит:
множество участков закрепления/раскрепления для обеспечения возможности закрепления закрепляемой рабочей части, подлежащей закреплению на живом организме или предмете, связанном с живым организмом, на основном блоке устройства или раскрепления от него, в зависимости от типа закрепляемой рабочей части; причем
вычислительное средство выполнено с возможностью выполнения процедуры определения закрепления/раскрепления по определению закрепления и раскрепления закрепляемой рабочей части по отношению к участку закрепления/раскрепления и типа закрепляемой рабочей части на основании изменения ускорения, которое представляется данными ускорения, при закреплении рабочей части на участке закрепления/раскрепления или при раскреплении от него, и
выполнения процедуры вычисления движения тела на основании определенного закрепления/раскрепления и типа, при переключении в режим, соответствующий типу закрепленной закрепляемой рабочей части; и
дисплейное средство выполнено с возможностью отображения экрана, соответствующего режиму.
7. Устройство определения движения тела для определения движения тела живого организма, содержащее:
средство определения ускорения для определения ускорения;
вычислительное средство для выполнения процедуры вычисления движения тела на основании данных ускорения, определенных средством определения ускорения; и
участок закрепления/раскрепления для обеспечения возможности закрепления закрепляемой рабочей части, подлежащей закреплению на живом организме или предмете, связанном с живым организмом, на основном блоке устройства, или раскрепления от него, при этом участок закрепления/раскрепления содержит:
направляющую для сдвига или поворота закрепляемой рабочей части, когда закрепляемая рабочая часть закреплена на основном блоке устройства или раскреплена от него, и
ударный участок, с которым одна часть закрепляемой рабочей части сталкивается при закреплении и раскреплении закрепляемой рабочей части вдоль направляющей, причем
вычислительное средство выполнено с возможностью выполнения процедуры определения закрепления/раскрепления рабочей части на участке закрепления/раскрепления на основании изменения ускорения при закреплении закреплении/раскреплении рабочей части и процедуры вычисления движения тела на основании определенного закрепления/раскрепления при переключении в режим, соответствующий состоянию после закрепления/раскрепления.
8. Устройство ввода для устройства определения движения тела, при этом устройство ввода содержит:
средство определения ускорения для определения ускорения;
вычислительное средство для выполнения вычисления на основании данных ускорения, определенных средством определения ускорения, и
корпус для вмещения средства определения ускорения и вычислительного средства, причем
корпус содержит ударную рабочую часть, подлежащую удару при столкновении; и
вычислительное средство сконфигурировано с возможностью определения данных ускорения при ударе, которые представляют изменение ускорения при ударе, нанесенном по ударной рабочей части, на основании данных ускорения,
определения информации о нанесенном ударе из данных ускорения, и
выполнения процедуры определения входной информации по определению информации, вводимой информацией об ударе.
9. Способ определения движения тела для определения движения тела живого организма на основании данных ускорения, указывающих изменение ускорения, вызванное движением тела живого организма, при этом способ определения движения тела содержит этапы, на которых:
определяют изменение ускорения, которое возникает при закреплении рабочей части на основном блоке устройства или при раскреплении от него, на основании данных ускорения; и
определяют движение тела на основании данных ускорения после закрепления или раскрепления посредством процедуры определения движения тела для режима, соответствующего состоянию после закрепления или раскрепления.
| US 2002151775 A1, 17.10.2002 | |||
| JP 2002191580 A, 09.07.2002 | |||
| US 2007112259 A1, 17.05.2007 | |||
| Стол для резки листового стекла | 1933 |
|
SU38280A1 |
| СИСТЕМА КОНТРОЛЯ БИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2004 |
|
RU2336808C2 |

