Изобретение относится к разделу пилотируемой космонавтики и предназначено для предварительной экспериментальной отработки испытателями наиболее эффективных методик реальной внекорабельной деятельности и последующей подготовки космонавтов (астронавтов) экипажей МКС к выполнению перемещений и различных технологических операций в условиях полной невесомости открытого космического пространства, а также в условиях пониженной гравитации на спутнике Земли Луне и на других космических объектах Солнечной системы.
Известна многофункциональная система имитации космического корабля (Европейская патентная заявка CN 202042069 U MULTI-ROLE SPACE SIMULATION SYSTEM AND SPACE SHIP SIMULATION SYSTEM, Int. Class.: G09B 9/52, H04L 29/06, Priority Data: 05.03.2011, Applicants: BEIJING SUPER VIEW TECHNOLOGY CO LTD [CN]), содержащий систему имитации бортовых систем космического корабля и отдельных факторов космического пространства, функционирующую на базе сервера, сетевые коммуникационные устройства и персональные компьютеры обучаемых с основным и дополнительным дисплеями и с устройством управления компьютером.
Известен также «Стенд подготовки экипажей международной космической станции с использованием элементов виртуальной реальности» (см. Web-страницу ФГБУ «НИИ ЦПК им.Ю.А.Гагарина»: http://www.gctc.ru/main.php?id=135), обеспечивающий моделирование бортовых систем и погружение в виртуальный мир Российского сегмента Международной космической станции, а также отработку группового взаимодействия членов экипажа при их совместной работе по эксплуатации и ремонту бортовых систем.
Недостатком данных систем является то, что они, относясь к автоматизированным обучающим системам, использующим синтезированные изображения бортового оборудования и визуализацию отдельных факторов космического пространства (на базе технологий виртуальной реальности), предназначены преимущественно для теоретической и первоначальной практической подготовки (так называемой предтренажерной подготовки: знакомство с устройством космического аппарата и принципами его управления, привитие первоначальных навыков по управлению космическим аппаратом, визуализация процессов и явлений космического пространства и т.д.). В составе этих систем отсутствуют штатные органы управления и средства отображения информации (или органы управления и средства отображения информации в тренажном исполнении, внешне полностью идентичные штатным), что не позволяет обеспечить приобретение обучаемыми операторами устойчивых перцептуальных и сенсорно-моторных навыков по управлению космическим аппаратом. В то же время огромным преимуществом систем, использующих технологии виртуальной реальности, является практически неограниченная возможность наглядной демонстрации обучаемым космического пространства и условий космического полета, например невесомости, солнечной радиации, перепада температур, метеорной пыли, перегрузки и т.д.
Однако во всех рассмотренных выше технических средствах подготовки отсутствует имитация такого важного фактора космического полета, как невесомость и, соответственно, не обеспечивается приобретение обучаемыми космонавтами сенсорно-моторных навыков при выполнении операций в открытом космосе, то есть при осуществлении так называемой внекорабельной деятельности.
Известны устройство для моделирования пониженной силы тяжести (Международная патентная заявка №ЕР1231139 DEVICE FOR THE SIMULATION OF VARIABLE GRAVITY ACCELERATIONS, IPC: B64D 47/00, B64G 7/00, Publication Date: 13.02.2001, Applicant: EADS SPACE TRANSP GMBH [DE]) и способ (Патент на изобретение РФ №2099256 СПОСОБ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СОВЕРШЕНСТВУЮЩИЙ СОСТОЯНИЕ ИСКУССТВЕННОЙ НЕВЕСОМОСТИ, И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА, МПК 6: B64G 7/00, Опубликовано: 20.12.1997, Патентообладатель: Сантр Насьональ Д'Этюд Спасьаль (FR)), а также летающие лаборатории (см. Web-страницу ФГБУ «НИИ ЦПК им.Ю.А.Гагарина»: http://www.gctc.ru/main.php?id=132), в которых для создания невесомости используется самолет, летящий по параболической траектории (по так называемой «параболе Кеплера»).
Основным недостатком данных устройств является сравнительная кратковременность имитации состояния невесомости (до 15 режимов невесомости, каждый длительностью ориентировочно 15-30 с, причем общее время пребывания в состоянии невесомости составляет не более 450 с), что позволяет обучаемым лишь ознакомиться с влиянием невесомости на организм, с особенностями пространственной ориентировки в безопорном пространстве и в лучшем случае выполнить только некоторые простейшие операции из комплекса процедур многочасовой внекорабельной деятельности.
Известны метод и устройство создания переменной силы тяжести с эффектом присутствия в виртуальной реальности (Международная патентная заявка №WO/2011/032363 METHOD AND APPARATUS OF VARIABLE G FORCE EXPERIENCE AND CREATE IMMERSIVE VR SENSATIONS, IPC: B64G 7/00, G09B 9/00, Publication Date: 24.03.2011, Applicant: XIAO, Quan [CN/CN]), а также устройство и метод для имитации ощущений, испытываемых в космическом пространстве (Международная патентная заявка №WO/2009/029657 APPARATUS AND METHOD OF SIMULATING A SOMATOSENSORY EXPERIENCE IN SPACE, IPC: B64G 7/00, Publication Date: 05.03.2009, Applicant: XIAO, Quan [CN/US]). Основным недостатком этих методов и устройств для их осуществления является необходимость использования гидросреды для обезвешивания обучаемого космонавта, помещенного в специально адаптированный для погружений в гидросреду космический скафандр.
Сравнительный анализ работы космонавтов в условиях открытого космоса и в гидросреде (см. Тренажерные комплексы и тренажеры. Технологии разработки и опыт эксплуатации / В.Е.Шукшунов, В.В.Циблиев, С.И.Потоцкий и др. Под ред. В.Е.Шукшунова. - М.: Машиностроение, 2005. - с.258-260) показывает, что при работе в гидросреде возникают дополнительные нагрузки на обучаемого (являющиеся предпосылками для привития некоторых так называемых «ложных навыков»), которые вызваны рядом факторов, основным из которых является гидродинамическое сопротивление жидкости как при движениях рук, так и особенно ощутимое гидродинамическое сопротивление при перемещениях обучаемых космонавтов в гидросреде, в то время как в открытом космосе перемещение осуществляется по инерции после кратковременного приложения усилия и продолжается без «замирания» из-за отсутствия каких-либо сил сопротивления. Кроме этого, при погружениях в гидросреду возникает необходимость закрепления на скафандре дополнительных грузов для создания нулевой плавучести, которые приводят к смещению его центра масс, что также несколько влияет на динамические характеристики при перемещении.
Наиболее близким по технической сущности аналогом, принятым в качестве прототипа предлагаемого изобретения, является система управления (Патент на изобретение РФ №2355039 СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС, МПК G09B 9/00 (2006.01), дата начала отсчета срока действия патента: 12.12.2007, патентообладатель: Государственное образовательное учреждение высшего профессионального образования "Южно-Российский государственный технический университет (Новочеркасский политехнический институт)" ГОУ ВПО ЮРГТУ (НПИ) (RU), содержащая скафандр с обучаемым, задатчик веса груза, датчик положения, индикатор нуля, индикатор отказа датчика усилия, задатчик момента электродвигателя, сумматор, устройство регулирования момента, электродвигатель, передаточное устройство, датчик усилия, блок выделения разности усилий, регулятор усилия, кнопка запуска коррекции, первый блок коррекции и ключ, датчик скорости и второй блок коррекции.
Данная система управления, предназначенная для создания тренажера по подготовке к выходу в космос обучаемого космонавта в переходном (стыковочном) отсеке орбитального модуля Российского сегмента Международной космической станции и осуществлению его внекорабельной деятельности в открытом космосе, обеспечивает имитацию состояния невесомости в воздушной среде методом силокомпенсирующего обезвешивания космонавта в скафандре, перемещающегося в так называемом «безопорном пространстве».
Система управления вертикальным перемещением обучаемого на тренажере выхода в космос обладает следующими существенными недостатками:
- система обеспечивает создание условий безопорного пространства только для трех степеней свободы;
- для скафандра с обучаемым использовано эффективное силокомпенсирующее обезвешивание активного типа только для вертикального перемещения, а в горизонтальной плоскости обеспечиваются перемещения лишь пассивного типа, то есть за счет мускульной силы самого обучаемого, которому приходится перемещать помимо своей массы вместе со скафандром (полезная масса), еще и массу тележки, на которой он подвешен, и массу моста, на котором подвешена тележка («паразитная» масса, перемещение которой способствует привитию в процессе тренировки определенных «ложных навыков»).
Кроме этого, данная система управления не предоставляет ряд функций, необходимых для обеспечения профессионального уровня подготовки на современном функционально-моделирующем стенде. Во-первых, не предусматривает компоновку рабочей зоны обучаемых оборудованием, необходимым для получения перцептуальных и сенсорно-моторных навыков при работе в открытом космическом пространстве на орбите Земли, в том числе с манипулятором МКС, во-вторых, не обеспечивает возможность имитации пониженной гравитации, свойственной перспективным для посещения человеком космическим объектам (Луна, Марс, спутники Марса и астероиды), в-третьих, не обеспечивает жизнедеятельность обучаемого в скафандре, в-четвертых, не предусматривает возможность контроля и управления ходом тренировки, в-пятых, не предусматривает возможность связи обучаемого с остальными тренируемыми членами экипажа МКС и имитации связи со специалистами Центра управления полетами, в-шестых, не обеспечивает возможность телевизионного наблюдения за обучаемым, в-седьмых, не предусматривает возможность моделирования светотеневой обстановки, характерной для космических объектов, которые находятся на орбите Земли, в-восьмых, не обеспечивает психофизиологический контроль за обучаемым в реальном масштабе времени, в-девятых, не предоставляет обучаемым возможность визуализации ближнего окружающего пространства (космические аппараты) и дальнего космического пространства (Земля, Луна, Солнце и другие космические объекты) и, в-десятых, не обеспечивает обслуживающий персонал ремонтно-технологической связью.
Целью изобретения является расширение функциональных возможностей предлагаемого функционально-моделирующего стенда для обеспечения предварительной экспериментальной отработки испытателями наиболее эффективных методик так называемой «внекорабельной деятельности» и последующего профессионального уровня подготовки космонавтов (астронавтов) к выполнению перемещений и различных технологических операций на орбите Земле в условиях имитируемой «полной» невесомости открытого космического пространства, а также для подготовки космонавтов (астронавтов) к миссиям на поверхность Луны, Марса, спутников Марса и крупных астероидов, имеющих пониженную (по сравнению с Землей) гравитацию.
Поставленная цель достигается тем, что в функционально-моделирующий стенд для создания условий интерактивного безопорного пространства и пониженной гравитации, состоящий из механического передаточного устройства, датчика усилия и скафандра, предназначенного для размещения обучаемого, введены сервер моделирования, консоль оператора, комплект телекамер наблюдения, средства отображения информации коллективного пользования, пульт контроля и управления, состоящий из средств связи, панели управления освещением, панели ручного управления электроприводами, персонального компьютера инструктора, персонального компьютера инженера, персонального компьютера врача, второго блока цифровой связи; сервер системы управления электроприводами, первый блок цифровой связи, локальная вычислительная сеть системы видеонаблюдения, сервер системы видеонаблюдения, локальная вычислительная сеть передачи данных, комплекс устройств сопряжения с объектом, первый адаптер беспроводной связи, набор каскадов концевых выключателей, датчик положения тележки, датчик положения моста, комплектный электропривод вертикального перемещения, комплектный электропривод перемещения тележки, комплектный электропривод перемещения моста, панель автоматики электроприводов, космический грузовой манипулятор, средства освещения, второй адаптер беспроводной связи, датчик отклонения, упорный подшипник, демпфирующее устройство, одностепенной шарнирный подвес, фрагмент макета орбитального модуля, участок, имитирующий поверхность Луны, с комплектом учебного оборудования, мобильный пульт управления электроприводами, третий блок цифровой связи, система визуализации, средства медицинского контроля, средства обеспечения жизнедеятельности, датчик положения скафандра по вертикали, датчик абсолютного пространственного положения скафандра и участок, имитирующий поверхность Марса, с комплектом учебного оборудования; к первому входу-выходу консоли оператора подключен второй вход-выход сервера моделирования, ко второму входу-выходу - второй вход-выход сервера системы управления электроприводами; к первому входу-выходу локальной вычислительной сети системы видеонаблюдения подключен первый вход-выход сервера системы видеонаблюдения, ко второму входу-выходу - вход-выход комплекта телекамер наблюдения; выход сервера системы видеонаблюдения подключен к входу средств отображения информации коллективного пользования; панель управления освещением через средства освещения подключена к входам космического грузового манипулятора, фрагмента макета орбитального модуля, участка, имитирующего поверхность Луны, с комплектом учебного оборудования и участка, имитирующего поверхность Марса, с комплектом учебного оборудования; вход-выход панели ручного управления электроприводами через панель автоматики электроприводов подключена ко вторым входам-выходам комплектного электропривода вертикального перемещения, комплектного электропривода перемещения тележки и комплектного электропривода перемещения моста; к первому входу-выходу локальной вычислительной сети передачи данных подключен первый вход-выход сервера моделирования, ко второму входу-выходу - вход-выход сервера системы управления электроприводами, к третьему входу-выходу - вход-выход первого блока цифровой связи, к четвертому входу-выходу - второй вход-выход сервера системы видеонаблюдения, к пятому входу-выходу - вход-выход персонального компьютера инструктора, к шестому входу-выходу - вход-выход персонального компьютера инженера, к седьмому входу-выходу - вход-выход персонального компьютера врача, к восьмому входу-выходу - вход-выход второго блока цифровой связи, к девятому входу-выходу - вход-выход системы визуализации, к десятому входу-выходу - вход-выход третьего блока цифровой связи, к одиннадцатому входу-выходу - первый вход-выход комплекса устройств сопряжения с объектом, к входу - выход средств медицинского контроля; вход-выход мобильного пульта управления электроприводами через второй адаптер беспроводной связи подключен ко второму входу-выходу первого адаптера беспроводной связи; ко второму входу-выходу комплекса устройств сопряжения с объектом подключен первый вход-выход первого адаптера беспроводной связи, к третьему входу-выходу - первый вход-выход комплектного электропривода вертикального перемещения, к четвертому входу-выходу - первый вход-выход комплектного электропривода перемещения тележки, к пятому входу-выходу - первый вход-выход комплектного электропривода перемещения моста, к шестому входу-выходу - вход-выход космического грузового манипулятора, к седьмому входу-выходу - второй вход-выход панели автоматики электроприводов, к первому входу - выход датчика положения скафандра по вертикали, ко второму входу - выход датчика абсолютного пространственного положения скафандра, к третьему входу - информационный выход датчика усилия, к четвертому входу - выход датчика отклонения, к пятому входу - выход набора каскадов концевых выключателей, к шестому входу - выход датчика положения тележки, а к седьмому входу - выход датчика положения моста; к первому выходу механического передаточного устройства подключен вход набора каскадов концевых выключателей, ко второму выходу - вход датчика положения тележки, к третьему выходу - вход датчика положения моста, к четвертому выходу - вход датчика отклонения, к первому входу - выход комплектного электропривода вертикального перемещения, ко второму входу - выход комплектного электропривода перемещения тележки, к третьему входу - выход комплектного электропривода перемещения моста, к входу-выходу - через последовательно соединенные упорный подшипник, датчик усилия, демпфирующее устройство и одностепенной шарнирный подвес - первый вход-выход скафандра; ко второму входу-выходу скафандра подключен вход-выход средств обеспечения жизнедеятельности, к третьему входу-выходу - вход-выход средств связи, к первому выходу - вход датчика абсолютного пространственного положения скафандра, ко второму выходу - вход датчика положения скафандра по вертикали, к третьему выходу - вход средств медицинского контроля, к четвертому выходу - вход локальной вычислительной сети системы видеонаблюдения.
Сущность изобретения состоит в том, что в предлагаемом функционально-моделирующем стенде обеспечивается предварительная экспериментальная отработка испытателями наиболее эффективных методик реальной внекорабельной деятельности и последующая профессиональная подготовка обучаемого космонавта (астронавта), «одетого» в штатный выходной скафандр Российского сегмента МКС типа «Орлан» и «погруженного» в интерактивное безопорное пространство с пятью степеням свободы в условиях имитируемой «полной» невесомости, по приобретению устойчивых перцептуальных (распознавательных) и сенсорно-моторных (исполнительных) навыков при отработке практических задач в открытом космическом пространстве на орбите Земли, а также обеспечивается подготовка обучаемого к миссиям на поверхности Луны, Марса и крупных астероидов, имеющих пониженную силу гравитацию.
Сущность изобретения поясняется графическими материалами.
На фиг.1 представлена функционально-структурная схема функционально-моделирующего стенда для создания условий интерактивного безопорного пространства и пониженной гравитации.
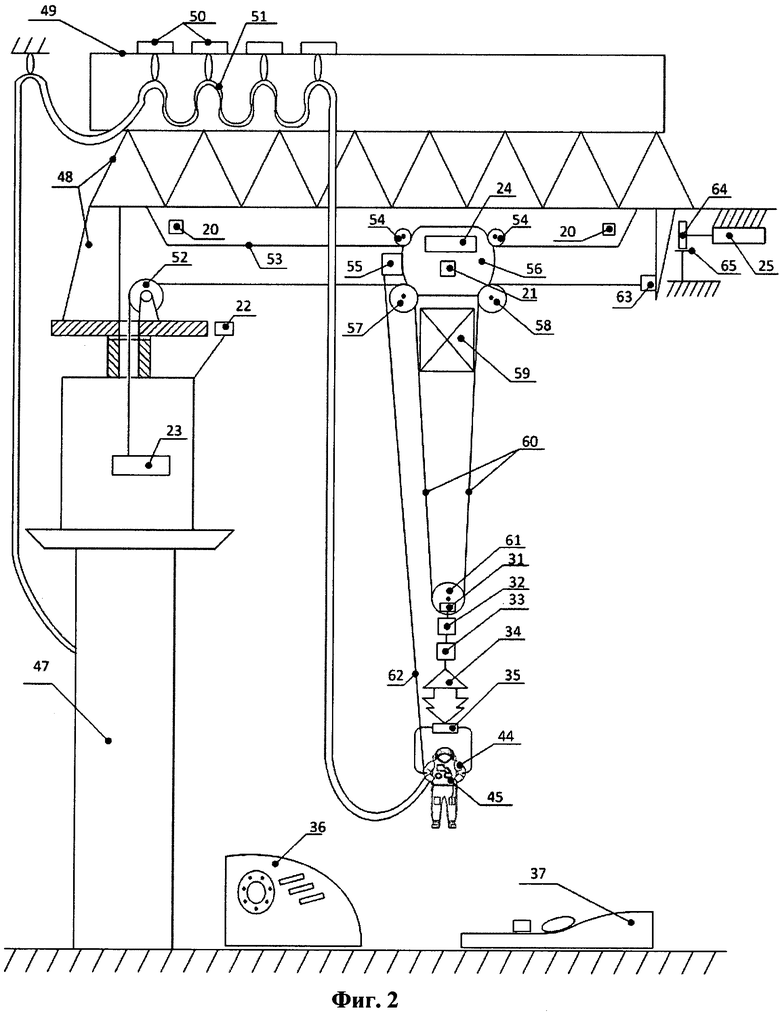
На фиг.2 представлена кинематическая схема механического передаточного устройства с изображением ориентировочных мест установки отдельных компонентов функционально-моделирующего стенда.
На фото представлен общий вид функционально-моделирующего стенда в двух ракурсах.
Согласно фиг.1 функционально-моделирующий стенд для создания условий интерактивного безопорного пространства и пониженной гравитации включает сервер моделирования 1, консоль оператора 2, комплект телекамер наблюдения 3, средства отображения информации коллективного пользования 4, пульт контроля и управления 5, который состоит из средства связи 6, панели управления освещением 7, панели ручного управления электроприводами 8, персонального компьютера инструктора 9, персонального компьютера инженера 10, персонального компьютера врача 11 и второго блока цифровой связи 12. Кроме этого функционально-моделируюший стенд содержит сервер системы управления электроприводами 13, первый блок цифровой связи 14, локальную вычислительную сеть системы видеонаблюдения 15, сервер системы видеонаблюдения 16, локальную вычислительную сеть передачи данных 17, комплекс устройств сопряжения с объектом 18, первый адаптер беспроводной связи 19, набор каскадов концевых выключателей 20, датчик положения тележки 21, датчик положения моста 22, комплектный электропривод вертикального перемещения 23, комплектный электропривод перемещения тележки 24, комплектный электропривод перемещения моста 25, панель автоматики электроприводов 26, механическое передаточное устройство 27, космический грузовой манипулятор 28, средства освещения 29, второй адаптер беспроводной связи 30, датчик отклонения 31, упорный подшипник 32, датчик усилия 33, демпфирующее устройство 34, одностепенной шарнирный подвес 35, фрагмент макета орбитального модуля 36, участок, имитирующий поверхность Луны, с комплектом учебного оборудования 37, мобильный пульт управления электроприводами 38, третий блок цифровой связи 39, систему визуализации 40, средства медицинского контроля 41, средства обеспечения жизнедеятельности 42, датчик положения скафандра по вертикали 43, датчик абсолютного пространственного положения скафандра 44, скафандр 45, предназначенный для размещения обучаемого и участок, имитирующий поверхность Марса, с комплектом учебного оборудования 46.
К первому входу-выходу консоли оператора 2 подключен второй вход-выход сервера моделирования 1, ко второму входу-выходу - второй вход-выход сервера системы управления электроприводами 13.
К первому входу-выходу локальной вычислительной сети системы видеонаблюдения 15 подключен первый вход-выход сервера системы видеонаблюдения 16, ко второму входу-выходу - вход-выход комплекта телекамер наблюдения 3; выход сервера системы видеонаблюдения 16 подключен к входу средств отображения информации коллективного пользования 4.
Панель управления освещением 7 через средства освещения 29 подключена к входам космического грузового манипулятора 28, фрагмента макета орбитального модуля 36, участка, имитирующего поверхность Луны, с комплектом учебного оборудования 37 и участка, имитирующего поверхность Марса, с комплектом учебного оборудования 46.
Вход-выход панели ручного управления электроприводами 8 через панель автоматики электроприводов 26 подключен ко вторым входам-выходам комплектного электропривода вертикального перемещения 23, комплектного электропривода перемещения тележки 24 и комплектного электропривода перемещения моста 25.
К первому входу-выходу локальной вычислительной сети передачи данных 17 подключен первый вход-выход сервера моделирования 1, ко второму входу-выходу - вход-выход сервера системы управления электроприводами 13, к третьему входу-выходу - вход-выход первого блока цифровой связи 14, к четвертому входу-выходу - второй вход-выход сервера системы видеонаблюдения 16, к пятому входу-выходу - вход-выход персонального компьютера инструктора 9, к шестому входу-выходу - вход-выход персонального компьютера инженера 10, к седьмому входу-выходу - вход-выход персонального компьютера врача 11, к восьмому входу-выходу - вход-выход второго блока цифровой связи 12, к девятому входу-выходу - вход-выход системы визуализации 40, к десятому входу-выходу - вход-выход третьего блока цифровой связи 39, к одиннадцатому входу-выходу - первый вход-выход комплекса устройств сопряжения с объектом 18, к входу - выход средств медицинского контроля 41.
Вход-выход мобильного пульта управления электроприводами 38 через второй адаптер беспроводной связи 30 подключен ко второму входу-выходу первого адаптера беспроводной связи 19.
Ко второму входу-выходу комплекса устройств сопряжения с объектом 18 подключен первый вход-выход первого адаптера беспроводной связи 19, к третьему входу-выходу - первый вход-выход комплектного электропривода вертикального перемещения 23, к четвертому входу-выходу - первый вход-выход комплектного электропривода перемещения тележки 24, к пятому входу-выходу - первый вход-выход комплектного электропривода перемещения моста 25, к шестому входу-выходу - вход-выход космического грузового манипулятора 28, к седьмому входу-выходу - второй вход-выход панели автоматики электроприводов 26, к первому входу - выход датчика положения скафандра по вертикали 43, ко второму входу - выход датчика абсолютного пространственного положения скафандра 44, к третьему входу - информационный выход датчика усилия 33, к четвертому входу - выход датчика отклонения 31, к пятому входу - выход набора каскадов концевых выключателей 20, к шестому входу - выход датчика положения тележки 21, а к седьмому входу - выход датчика положения моста 22.
К первому выходу механического передаточного устройства 27 подключен вход набора каскадов концевых выключателей 20, ко второму выходу - вход датчика положения тележки 21, к третьему выходу - вход датчика положения моста 22, к четвертому выходу - вход датчика отклонения 31, к первому входу - выход комплектного электропривода вертикального перемещения 23, ко второму входу - выход комплектного электропривода перемещения тележки 24, к третьему входу - выход комплектного электропривода перемещения моста 25, к входу-выходу - через последовательно соединенные упорный подшипник 32, датчик усилия 33, демпфирующее устройство 34 и одностепенной шарнирный подвес 35 - первый вход-выход скафандра 45.
Ко второму входу-выходу скафандра 45 подключен вход-выход средств обеспечения жизнедеятельности 42, к третьему входу-выходу - вход-выход средств связи 6, к первому выходу - вход датчика абсолютного пространственного положения скафандра 44, ко второму выходу - вход датчика положения скафандра по вертикали 43, к третьему выходу - вход средств медицинского контроля 41, к четвертому выходу - вход локальной вычислительной сети системы видеонаблюдения 15.
Согласно фиг.2 механическое передаточное устройство 27 включает несущую колонну 47, мост 48, раму 49, пассивные тележки 50, шланг 51, верхние блоки 52, 57 и 58, рельсы 53, колеса тележки 54, основной блок 55 датчика положения скафандра по вертикали 43 (см. фиг.1), тележку 56, успокоитель колебаний 59, трос 60, нижний блок 61, измерительный трос 62 датчика положения скафандра по вертикали 43 (см. фиг.1), узел крепления троса 63, ведущее колесо 64 и несущий монорельс 65.
Кроме этого, на фиг.2 показаны ориентировочные места установки отдельных компонентов функционально-моделирующего стенда: набор каскадов концевых выключателей 20 (на фиг.2 представлены только два концевых выключателя для тележки 56), датчики положения моста 22 и тележки 21, мотор-редуктор с барабаном лебедки комплектного электропривода вертикального перемещения 23, мотор-редукторы комплектного электропривода перемещения тележки 24, мотор-редукторы комплектного электропривода перемещения моста 25, датчик отклонения 31, упорный подшипник 32, датчик усилия 33, демпфирующее устройство 34, одностепенной шарнирный подвес 35, фрагмент макета орбитального модуля 36, участок поверхности Луны с комплектом учебного оборудования 37, датчик абсолютного пространственного положения скафандра 44 и скафандр 45.
Сервер моделирования 1 представляют собой высокопроизводительный компьютер (с установленным программным обеспечением, соответствующим выполняемым функциональным задачам) в промышленном исполнении (в корпусе, предназначенном для установки в стойку с форм-фактором 19 дюймов). Основное назначение сервера 1: решение уравнений динамики твердого тела (скафандр с обучаемым 45) с заданным шагом вычислений в реальном масштабе времени, информационный обмен по локальной вычислительной сети передачи данных 17 с сервером системы управления электроприводами 13, а также координация работы сервера системы управления электроприводами 13 и системы визуализации 40. Кроме этого, в сервере 1 обеспечивается долговременное хранение информации по результатам экспериментальных исследований и учебного процесса, например оценки обучаемого при выполнении упражнений с космическим грузовым манипулятором 28.
Консоль оператора 2, предназначенная для управления сервером моделирования 1 и сервером системы управления электроприводами 13, представляет собой комплект, состоящий из компьютерного LCD-монитора, клавиатуры и манипулятора «Мышь».
Комплект телекамер наблюдения 3, предназначенный для дистанционного визуального наблюдения за отработкой процедур и упражнений по внекорабельной деятельности обучаемых и за миссиями на поверхности Луны и Марса, состоит не менее чем из восьми IP-камер высокого разрешения, которые являются управляемыми, то есть позволяют изменять направление линии визирования, масштабировать изображение и т.д.
Средства отображения информации коллективного пользования 4 предназначены для предъявления инструктору, инженеру и врачу стенда визуальной обстановки в рабочих зонах стенда, контролируемых комплектом телекамер наблюдения 3 и телекамерой, установленной на шлеме скафандра, а также любой другой информации, формируемой серверами и персональными компьютерами стенда, например, формата инженера с изображением результатов контроля работоспособности программно-технических средств, которые задействуются в проводимом мероприятии. К качестве средств отображения информации коллективного пользования 4 используются два большеразмерных LCD-монитора высокого разрешения.
Пульт контроля и управления 5, обеспечивающий размещение инструктора, инженера и врача стенда за эргономичными автоматизированными рабочими местами, включает средства связи 6, панель управления освещением 7, панель ручного управления электроприводами 8, три персональных компьютера 9, 10 и 11 и второй блок цифровой связи 12. Пульт контроля и управления 5 предназначен для задания сценария и начальных условий отработки практических задач внекорабельной деятельности (далее тренировки), для экспериментальной отработки учебных упражнений с целью выбора наиболее эффективных методик реальной внекорабельной деятельности экипажей МКС и соответствующих им оптимальных методик подготовки космонавтов (астронавтов), для запуска и оперативного контроля, ввода отказов, а также останова и завершения тренировки.
Средства связи 6, предназначенные для обеспечения речевых переговоров инструктора (выполняющего на стенде попеременно или роль членов экипажа, находящихся в орбитальных отсеках МКС, или роль специалистов Центра управления полетами) с обучаемым в скафандре 45, реализованы на базе пультов абонентов и блоков контрольных громкоговорителей, использующих проводные линии связи.
Панель управления освещением 7 предназначена для включения, выключения и регулирования яркости каждого из прожекторов, входящих в состав средств освещения 30.
Панель ручного управления комплектом электроприводов 8 предназначена для оперативного управления комплектными электроприводами вертикального перемещения 23, перемещения тележки 24 и перемещения моста 25 при возникновении в режиме «Автоматического управления электроприводами» отказов и нештатных ситуаций в основных компонентах системы управления: сервер моделирования 1 и системы управления электроприводами 9, комплекс устройств сопряжения с объектом 18 и набор датчиков 21, 22, 27, 32 и 34.
В качестве персональных компьютеров инструктора 9, инженера 10 и врача 11, предназначенных для создания автоматизированных рабочих мест инструктора, инженера и врача стенда, используются высокопроизводительные офисные компьютеры (с установленным программным обеспечением, соответствующим выполняемым функциональным задачам).
Первый 14, второй 12 и третий 39 блоки цифровой связи, предназначенные для обеспечения ремонтно-технологической связи инженера стенда с обслуживающим персоналом в процессе тренировок, а также при выполнении пуско-наладочных работ, операций по техническому обслуживанию и т.д., представляют собой компактные блоки с микротелефонной гарнитурой, которые позволяют осуществлять дуплексную телефонную цифровую связь по локальной вычислительной сети передачи данных 17.
Сервер системы управления электроприводами 13, предназначенный для преобразования вычисленных сервером моделирования 1 значений в величины координат соответствующих приводов, реализующих перемещение скафандра с обучаемым 45 с тремя степенями свободы, представляет собой высокопроизводительный компьютер (с установленным программным обеспечением соответствующим выполняемым функциональным задачам) в промышленном исполнении (в корпусе, предназначенном для установки в стойку с форм-фактором 19-дюймов).
Локальные вычислительные сети системы видеонаблюдения 15 и передачи данных 17 реализованы на базе высокоскоростных сетевых коммутаторов интерфейсом «Ethernet» и кабелей связи типа «витая пара категории б».
Сервер системы видеонаблюдения 16 представляет собой высокопроизводительный компьютер (с установленным программным обеспечением, соответствующим выполняемым функциональным задачам) в промышленном исполнении (в корпусе, предназначенном для установки в стойку с форм-фактором 19-дюймов). Основное назначение сервера 16: получение по сети видеонаблюдения 15 и запись видеоинформации от комплекта телекамер наблюдения 3, установленных в различных местах стенда, и от телекамеры, установленной на шлеме скафандра с обучаемым 45, а также воспроизведение этой информации на средствах отображения информации коллективного пользования 4 по запросам заинтересованных пользователей, например инструктора стенда. Помимо этого с помощью сервера 16 выполняется информационный обмен между локальной вычислительной сетью системы видеонаблюдения 15 и локальной вычислительной сети передачи данных 17.
Комплекс устройств сопряжения с объектом 18 реализован на базе контроллера (с установленным программным обеспечением, соответствующим выполняемым функциональным задачам) и набора модулей ввода-вывода дискретной и аналоговой информации (пример реализации - комплекс типа WP8841 из семейства «WinPack» тайваньской фирмы «ICP DAS»). Основное назначение комплекса - управление в реальном масштабе времени электроприводами стенда, включая трансляцию, сформированных сервером системы управления электроприводами 13, обобщенных управляющих воздействий на комплектные электроприводы вертикального перемещения 23, перемещения тележки 24 и перемещения моста 25, а также получение контрольной информации от набора каскадов концевых выключателей 20, от датчиков положения тележки 21, положения моста 22, отклонения 31, усилия 33, положения скафандра 43 и абсолютного пространственного положения скафандра 44. Информационный обмен контроллера комплекса устройств сопряжения с объектом 18 с сервером системы управления электроприводами 13 осуществляется по локальной вычислительной сети передачи данных 17.
Первый 19 и второй 30 адаптеры беспроводной связи предназначены для реализации беспроводной связи мобильного пульта управления электроприводами 37 с комплексом устройств сопряжения с объектом 18. Как вариант, вместо подключения первого адаптера беспроводной связи 19 к комплексу устройств сопряжения с объектом 18 можно, выполнив его подключение к локальной вычислительной сети передачи данных 17, реализовать беспроводную связь по стандарту Wi-Fi.
Набор каскадов концевых выключателей 20 предназначен для упреждающей остановки электродвигателей комплектных электроприводов вертикального перемещения 23, горизонтального перемещения тележки 24 и моста 25 с целью предотвращения попадания подвижных элементов механического передаточного устройства 27 в предельные положения, за которыми возможны их повреждения и поломки.
Датчик положения тележки 21, предназначенный для обеспечения контроля фактического положения тележки 56 (см. фиг.2) во всем диапазоне ее перемещения по рельсам 53 (см. фиг.2), реализован на основе электромагнитной головки (установлена на тележке 56), которая считывает магнитные метки положения с предварительно намагниченной ленты, закрепленной на неподвижной части механизма (например, на рельсах 53). Пример реализации датчика положения тележки 21 - датчик типа «МТ Н5-F1000-E-LD-MP500» итальянской фирмы «Givi Missure».
В качестве датчика положения моста 22, предназначенного для обеспечения контроля фактического положения моста 48 (см. фиг.2) во всем диапазоне его перемещения вокруг оси несущей колонны 47 (см. фиг.2), используются датчик, аналогичный датчику положения тележки 21, электромагнитная головка которого расположена на неподвижной части механизма (например, на кронштейне, закрепленном на несущей колонне 47), а лента - на подвижных элементах конструкции моста.
Комплектный электропривод вертикального перемещения 23, предназначенный для перемещения нижнего блока 61 (см. фиг.2) механического передаточного устройства 27, представляет собой функционально полный комплект, реализованный на основе серии сервоприводов «Dynamic Line II» немецкой фирмы «Karl E.Brinkmann GmbH», состоящий из мотор-редуктора с барабаном лебедки и со встроенным дисковым электромагнитным тормозом, частотного преобразователя напряжения, набора датчиков напряжения, тока, положения ротора и температуры статора мотора. Причем в качестве мотора комплектного электропривода используется синхронный электродвигатель с постоянными магнитами в роторе.
Комплектный электропривод перемещения тележки 24 и моста 25, предназначенный для перемещения тележки 56 (см. фиг.2) и моста 48 (см. фиг.2) механического передаточного устройства 27, представляет собой полный комплект, реализованный на основе серии сервоприводов «Dynamic Line II» немецкой фирмы «Karl Е.Brinkmann GmbH», состоящий из двух идентичных мотор-редукторов со встроенными дисковыми электромагнитными тормозами и двух частотных преобразователей напряжения, работающих синхронно, двух наборов датчиков напряжения, тока, положения ротора и температуры статора мотора. Причем в качестве моторов комплектного электропривода используется синхронные электродвигатели с постоянными магнитами в роторе.
Панель автоматики электроприводов 26 предназначена для обеспечения быстродействующей защиты комплектных электроприводов вертикального перемещения 23, тележки 24, моста 25 от токов перегрузки и коротких замыканий.
Механическое передаточное устройство 27 (см. фиг.2) предназначено для обеспечения перемещения обучаемого по трем степеням свободы. Мост 48, оснащенный рамой 49 и рельсами 53, перемещается вокруг оси несущей колонны 47 с помощью ведущего колеса 64, приводимого в движение мотор-редукторами комплектного электропривода перемещения моста 25, по несущему монорельсу 65, представляющему собой часть кольца с раствором ориентировочно 215º. Тележка 56, опирающаяся на две пары колес 54, одна из которых является ведущей, приводится в движение мотор-редукторами комплектного электропривода перемещения тележки 24 и перемещается по рельсам 53 моста 48. Мотор-редуктор с барабаном лебедки комплектного электропривода вертикального перемещения 23 приводит в движение канатную передачу, состоящую из троса 60, трех верхних блоков 52, 57 и 58, нижнего блока 61 и узла крепления троса 63. Причем запасовка троса 60 выполнена по специальной кинематической схеме, так называемый «полиспаст», благодаря чему обеспечивается независимость вертикальных и горизонтальных перемещений объекта обезвешивания. К нижнему блоку 61 через упорный подшипник 32, датчик усилия 33, демпфирующее устройство 34 и одностепенной шарнирный подвес 35 подвешен объект обезвешивания - скафандр с обучаемым 45. С верхней части несущей колонны 47 по мосту 48 и раме 49 с несколькими пассивными тележками 50 проложен шланг 51 с воздушным трубопроводом и электрическими кабелями средств обеспечения жизнедеятельности (см. позицию 42 на фиг.1, на фиг.2 не показана), который, свободно спускаясь вниз, подключен к ранцу скафандра 45. Как вариант вместо пассивных тележек 50, которые позволяют удерживать шланг 51 в подвешенном состоянии на раме 49 моста 48 при горизонтальных перемещениях скафандра 45, можно использовать гибкие кабель-каналы серии «Sabin Chain» южно-корейской фирмы «CPS». На верхней части несущей колонны 47 в начале и в конце рельсов 53 в нижней части тележки 56 установлены концевые выключатели из каскада концевых выключателей 20 (на фиг.2 представлены только два концевых выключателя для тележки 56). На верхней части несущей колонны 47 и на тележке 56 установлены соответственно датчики положения моста 22 и тележки 21. Кроме этого, на нижнем блоке 61 установлен датчик отклонения 31, на скафандре 45 - датчик абсолютного пространственного положения скафандра 44. На тележке 56 закреплен основной блок 55 датчика положения скафандра по вертикали 43 (см. фиг.1), конец измерительного троса 62 которого зафиксирован на ранце скафандра 45. Помимо этого с верхней части несущей колонны 47 по мосту 48 и раме 49 с несколькими пассивными тележками 50 проложен кабельный жгут (на фиг.2 не показан) к электрооборудованию, установленному на тележке 56 (датчик положения тележки 21, комплектный электропривод перемещения тележки 24 и основной блок 55 датчика положения скафандра по вертикали 43), и к датчикам отклонения 31 и усилия 33. Как вариант вместо применения гибкого вертикального подвеса кабелей (например, в виде спиральной пружины) от датчиков отклонения 31 и усилия 33 к тележке 56 можно поместить эти кабели в шланг 51.
Космический грузовой манипулятор 28, предназначенный для отработки операций в открытом космическом пространстве, связанных с перемещениями грузов и т.д., представляет собой действующий полномасштабный макет манипулятора «Стрела» (состоит из грузовой стрелы ГСтМ телескопической конструкции, мобильного звена для такелажного узла стрелы, электромеханических приводов и поста оператора с пультом управления), устанавливаемый на стыковочном отсеке - модуле СО-1 «Пирс» или на исследовательском модуле МИМ-2 «Поиск» МКС. Как второй вариант реализации космического грузового манипулятора 28 в функционально-моделирующем стенде используется манипулятор «Стрела» в тренажном исполнении, состоящий только из поста оператора с пультом управления и части грузовой стрелы ГСтМ (первого звена телескопической конструкции стрелы).
Средства освещения 29, предназначенные для моделирования светотеневой обстановки при работе обучаемого на фрагменте макета орбитального модуля 36, в том числе и с космическим манипулятором 28, а также на участках поверхности Луны 37 и Марса 46 с комплектами учебного оборудования, реализованы на базе нескольких прожекторов высокой яркости и устройств их включения.
В качестве датчика отклонения 31, предназначенного для обеспечения контроля отклонения нижнего блока 61 (см. фиг.2) механического передаточного устройства 27 от вертикальной оси, применен инклинометр, например, из семейства «GNAMG» фирмы «Baumer IVO».
Упорный подшипник 32 предназначен для обеспечения поворотов скафандра с обучаемым 45 вокруг вертикальной оси (угловое перемещение по курсу).
В качестве датчика усилия 33, предназначенного для обеспечения обратной связи по значению усилия обезвешивания при вертикальных перемещениях скафандра с обучаемым 45, использован тензорезисторный датчик, например, типа U9B/5KN немецкой фирмы «Hottinger Baldwin Messtechnik GmbH».
В качестве демпфирующего устройства 34, предназначенного для компенсации нежелательных динамических воздействий на обучаемого в скафандре 45 при срабатывании электромагнитного тормоза комплектного электропривода вертикального перемещения 23, используется специальный механизм рычажно-пружинной конструкции.
Одностепенной шарнирный подвес 35 предназначен для обеспечения возможности поворота скафандра с обучаемым 45 вокруг горизонтальной оси (угловое перемещение по тангажу), проходящей через центр масс скафандра параллельно передней (задней) стороне скафандра. При необходимости обеспечения возможности углового перемещения скафандра с обучаемым 45 еще и по крену вместо одностепенного шарнирного подвеса 35 может быть применен шарнирный подвес с двумя степенями свободы (то есть двухстепенной шарнирный подвес).
Фрагмент макета орбитального модуля 36, предназначенный для получения обучаемым космонавтом (астронавтом) сенсорно-моторных навыков при работе в открытом космическом пространстве на орбите Земли, включает оборудование, навесные механизмы и приборы, поручни и средства фиксации на внешней поверхности орбитального модуля.
Участки, имитирующие поверхности Луны 37 и Марса 46, с комплектами учебного оборудования предназначены для отработки передвижения обучаемым космонавтом (астронавтом) в скафандре 45 по различным рельефам, характерным для поверхности данных планет, перемещения (переноски) грузов, выполнения отдельных работ, технологических операций и т.д. в условиях имитируемой пониженной гравитации.
Мобильный пульт управления электроприводами 38 предназначен для оперативного управления комплектными электроприводами вертикального перемещения 23, тележки 24, моста 25 в аварийных ситуациях, а также при выполнении пуско-наладочных работ и операций по техническому обслуживанию оборудования стенда.
Система визуализации 40 предназначена для предоставления обучаемому в скафандре 45 синтезированных изображений окружающего космического пространства (звезды. Солнце, планеты Солнечной системы, астероиды, метеориты, космические аппараты и космический мусор), фрагментов общего вида внешней поверхности орбитальных модулей Российского сегмента МКС, изображения МКС в целом и т.д. Система визуализации 40 представляет собой программно-технический комплекс, состоящий из высокопроизводительных графических станций (с установленным программным обеспечением, соответствующим выполняемым функциональным задачам), которые обеспечивают генерацию в реальном масштабе времени необходимых изображений, средств воспроизведения графической информации (экранов мониторов, видеопроекторов и экранов и т.д.).
В качестве средств медицинского контроля 41, предназначенных для обеспечения оперативного контроля психофизиологического состояния обучаемого, находящегося в скафандре 45, и передачи информации по локальной вычислительной сети передачи данных 17 в персональный компьютер врача 15 на пульте контроля и управления 5 используется устройства преобразования, гальванической развязки и передачи медицинской информации.
Средства обеспечения жизнедеятельности 42 предназначены для подачи воздуха для дыхания обучаемого и вентиляции скафандра, а также электропитания оборудования скафандра 45.
В качестве датчика положения скафандра по вертикали 43, предназначенного для обеспечения контроля фактического положения скафандра во всем диапазоне его перемещения по вертикали, используются трос-энкодер семейства «BTF» фирмы «SICK-Stegmann».
В качестве датчика абсолютного пространственного положения скафандра 44, предназначенного для обеспечения определения фактического положения скафандра в моделируемом пространстве в системе трех декартовых координат (x, y, z) и трех угловых координат (курс, крен и тангаж), использован трекер семейства «MEMS» фирмы «InvenSense».
В качестве скафандра 45, предназначенного для размещения обучаемого, используются выходные космические скафандры, то есть скафандры, предназначенные для выхода космонавтов в открытый космос (штатные для Российского сегмента Международной космической станции) семейства «Орлан» (см. Материал из Википедии - свободной энциклопедии Орлан (скафандр), http://ru.wikipedia.org/wiki/ Орлан_(скафандр)). В стенде использована специальная модификация скафандра в тренажном исполнении типа «Орлан-МКТ». В скафандре имеются комплекты средств связи, медицинской аппаратуры, оборудования обеспечения жизнедеятельности и телекамера, установленная на шлеме скафандра, которые через шланг 51 (см. фиг.2) подключаются соответственно к средствам связи 6 в пульте контроля и управления 5, медицинского контроля 41, обеспечения жизнедеятельности 42 и локальной вычислительной сети системы видеонаблюдения 11.
Предлагаемый стенд работает следующим образом.
Перед началом экспериментальных исследований или подготовки на стенде испытатели и обучаемые космонавты (астронавты) экипажей МКС проходят соответствующее теоретическое обучение. После этого испытатели или обучаемые космонавты приходят в помещение стенда, в котором скомпоновано механическое передаточное устройство 27 и остальные составные части функционально-моделирующего стенда (см. фото 1) и, при необходимости, детально знакомятся: с конструкцией оборудования, навесных механизмов и приборов, поручней и средств фиксации на внешней поверхности фрагмента макета орбитального модуля 36; с действующим макетом космического грузового манипулятора 28 (уточняют конструкцию грузовой стрелы манипулятора ГСтМ, мобильного звена для такелажного узла стрелы и устройство поста оператора с пультом управления); с участками, имитирующими поверхность Луны 37 или Марса 46, и комплектами учебного оборудования, которые размещены на этих участках; уточняют особенности Российского выходного скафандра 45, проверяют готовность скафандра к использованию и т.д.
После подачи электропитания инженер стенда совместно с обслуживающим персоналом производит включение и проверку работоспособности оборудования стенда (конкретный состав используемого оборудования, определяется в соответствии с планом использования стенда). В процессе выполнения работ по проверке работоспособности обслуживающим персоналом используются первый 14, второй 12 и третий 39 блоки цифровой связи, а также, при необходимости, мобильный пульт управления электроприводами 38.
После включения в работу средств обеспечения жизнедеятельности 42 испытатель или обучаемый космонавт (астронавт) может осуществить процесс одевания (или, точнее, «входа») в выходной космический скафандр, установленный на полу помещения стенда в вертикальном положении.
Ввод начальных условий и запуск стенда в работу.
Инструктор, выбрав с помощью программного обеспечения персонального компьютера инструктора 9 на пульте контроля и управления 5 предусмотренный планом сценарий экспериментальных исследований или тренировки и соответствующий набор начальных условий (режим освещения, исходное положение скафандра 45, вариант видеопотока, генерируемого системой визуализации 40 и т.д.), переводит средства освещения 29 (с помощью панели управления освещением 7 на пульте контроля и управления 5) в необходимый режим работы и запускает стенд в работу. Так как функционирование стенда как при экспериментальных исследованиях (отработке наиболее эффективных методик внекорабельной деятельности) испытателями, так и при тренировках космонавтов (астронавтов) - абсолютно идентично, далее описывается использование стенда только для целей обучения.
Внекорабельная деятельность в интерактивном безопорном пространстве
Параметры набора начальных условий тренировки из персонального компьютера инструктора 9 с помощью локальной вычислительной сети передачи данных 17 поступают в сервер моделирования 1, контроллер комплекса устройств сопряжения с объектом 18 и высокопроизводительные графические станции системы визуализации 40. При этом в сервере моделирования 1 активируется программный модуль, обеспечивающий моделирование невесомости. Контроллер, используя модули ввода-вывода дискретной и аналоговой информации комплекса устройств сопряжения с объектом 18, с помощью комплектных электроприводов вертикального перемещения 23, перемещения тележки 24, и перемещения моста 25 осуществляет позиционирование в требуемой зоне фрагмента макета орбитального модуля 36 скафандра с обучаемым 45, контролируя правильность отработки его положения с помощью датчиков положения тележки 21, моста 22 и скафандра по вертикали 43. После отработки заданных координат схемы автоматики комплектных электроприводов останавливают электродвигатели, синхронно включая электромагнитные тормоза, которые надежно фиксируют скафандр с обучаемым 45 по вертикали и в горизонтальной плоскости. Для повышения эффективности компенсации нежелательных (в том числе и опасных) динамических воздействий на обучаемого в скафандре 45 при его вертикальных перемещениях и, в особенности, при аварийном срабатывании электромагнитного тормоза комплектного электропривода вертикального перемещения 23 в стенде использовано демпфирующее устройство 34. Одновременно с позиционированием скафандра с обучаемым 45 с помощью комплектных электроприводов программное обеспечение высокопроизводительных графических станций системы визуализации 40 синтезирует изображение окружающего космического пространства (звезды, орбитальные модули МКС и т.д.), которое с помощью видеопроекторов проецируется на экран.
При необходимости перемещения в безопорном пространстве стенда обучаемый отталкивается руками от элементов конструкции фрагмента макета орбитального модуля 36 (или, захватив элементы конструкции, притягивает их к себе руками). Создаваемые обучаемым усилия в общем случае состоят из трех составляющих векторов (усилие по вертикали и два взаимно перпендикулярных усилия в горизонтальной плоскости) и трех моментов (момент по курсу, крену и тангажу). Усилия, действующие по вертикали, вызывают пропорциональное их величине изменение значения датчика усилия 33, которое комплексом устройств сопряжения с объектом 18 с помощью локальной вычислительной сети передачи данных 17 передается в сервер моделирования 1. Программное обеспечение сервера моделирования 1 выполняет решение уравнений динамики, передает вычисленные значения с помощью локальной вычислительной сети передачи данных 17 в сервер системы управления электроприводами 13, который, выполнив необходимые преобразования, передает значение координаты по вертикали с помощью локальной вычислительной сети передачи данных 17 в комплекс устройств сопряжения с объектом 18, приводя к соответствующему (в зависимости от величины и продолжительности усилия, прилагаемого обучаемым) перемещению скафандра с обучаемым 45 в направлении, противоположном направлению прилагаемого усилия. При этом за счет применения в контроллере комплекса устройств сопряжения с объектом 18 алгоритма пропорционально-интегрального регулирования схема автоматики комплектного электропривода вертикального перемещения 23 плавно приводит в движение электродвигатель и синхронно выключает электромагнитный тормоз мотор-редуктора.
Усилия обучаемого, действующие в горизонтальной плоскости, приводят к отклонению нижнего блока 61 (см. фиг.2) канатной передачи механического передаточного устройства 27 от вертикали на некоторый угол. Данный угол, измеряемый датчиком отклонения 31, отрабатывается (аналогично усилию, действующему по вертикали) комплектным электроприводом перемещения тележки 24 и моста 25, приводя к соответствующему перемещению скафандра с обучаемым 45. А момент, создаваемый обучаемым по курсу и тангажу, благодаря использованию в подвеске скафандра с обучаемым 45 упорного подшипника 32 и одностепенного шарнирного подвеса 35 приводит к соответствующему повороту скафандра в направлении, противоположном направлению прилагаемого усилия. Кроме этого, при использовании шарнирного подвеса 35 с двумя степенями свободы к возможности перемещения по курсу и тангажу добавляется еще и возможность перемещения по крену в соответствии со значением момента по крену, который создается обучаемым.
Полная информация о фактическом положении скафандра в моделируемом пространстве по трем линейным координатам (x, y, z) и трем угловым (курс, крен и тангаж), осуществляемая датчиком абсолютного пространственного положения скафандра 44, позволяет, при необходимости, предоставлять инструктору исчерпывающие данные об эволюциях обучаемого в интерактивном безопорном пространстве. Кроме этого, информация от датчика абсолютного пространственного положения скафандра 44, при необходимости, может использоваться системой визуализации 40 для изменения перспективы синтезированного изображения, например, фрагментов общего вида внешней поверхности орбитальных модулей при изменении (перемещении) расчетной точки зрения обучаемого.
Таким образом, в интерактивном безопорном пространстве, создаваемом функционально-моделирующим стендом, осуществляется активное силокомпенсирующее обезвешивание с помощью управляемых электроприводов по вертикали и в горизонтальной плоскости, а также обеспечивается возможность перемещения (пассивная подвижность за счет мускульных усилий) по курсу и тангажу.
При отработке отдельных (динамичных) экспериментов и учебных упражнений для уменьшения времени реакции системы управления интерактивным безопорным пространством на интерактивные воздействия обучаемого предусмотрено «перемещение» части задач, решаемых серверами моделирования 1 и управления электроприводами 13, в контроллер комплекса устройств сопряжения с объектом 18, в том числе путем реализации этих задач по упрощенному алгоритму.
При отработке задач внекорабельной деятельности обучаемый с помощью поручней перемещается по внешней поверхности фрагмента макета орбитального модуля 36, фиксируется страховочным фалом скафандра в нужной для выполнения работы зоне макета и выполняет необходимые операции с оборудованием, навесными механизмами и приборами, установленными в рабочей зоне на внешней поверхности макета. Причем для воссоздания яркого солнечного освещения фрагмента макета орбитального модуля 36, требующего от обучаемого, например, использования светофильтра на шлеме скафандра, инструктор имеет возможность регулирования яркости прожекторов из состава средств освещения 29 с помощью панели управления 7 на пульте контроля и управления 5.
Актуальной особенностью предлагаемого стенда является возможность отработки комплекса задач по использованию космического грузового манипулятора 28. При этом обучаемый, переместившись по поверхности фрагмента макета орбитального модуля 36, фиксирует скафандр 45 на посту оператора действующего полномасштабного макета манипулятора «Стрела» и, воздействуя на органы пульта управления, изменяет вылет (выдвигает-складывает) и перемещает (влево-вправо и вверх-вниз) грузовую стрелу ГСтМ. Кроме этого, управляющие воздействия обучаемого с помощью комплекса устройств сопряжения с объектом 18 (при необходимости, через сервер моделирования 1) поступают на графические станции системы визуализации 40, которая контролируя положение грузовой стрелы ГСтМ, имеет возможность «подвесить» на экране (экранах) средств воспроизведения графической информации к реальному такелажному узлу стрелы разнообразные виртуальные грузы, синхронно перемещающиеся вместе с реальной грузовой стрелой манипулятора. При использовании второго варианта реализации космического грузового манипулятора 28 (манипулятор «Стрела» в тренажном исполнении) обучаемый, переместившись по поверхности фрагмента макета орбитального модуля 36, фиксирует скафандр 45 на посту оператора манипулятора «Стрела» и, воздействуя на органы пульта управления, перемещает (влево-вправо и вверх-вниз) только первое реальное звено телескопической конструкции грузовой стрелы ГСтМ. Данные управляющие воздействия обучаемого, а также управляющие воздействия по изменению вылета (выдвижению-складыванию) грузовой стрелы ГСтМ позволяют системе визуализации 40 (по аналогии с вариантом действующего полномасштабного макета манипулятора «Стрела») вывести на экран (экраны) средств воспроизведения графической информации изображение виртуального продолжения первого реального звена телескопической конструкции грузовой стрелы ГСтМ с такелажным узлом стрелы и разнообразными виртуальными грузами.
В процессе тренировки средства обеспечения жизнедеятельности 42 осуществляют очистку и подачу воздуха для дыхания обучаемого, а также подачу низковольтного напряжения для электропитания устройств оборудования скафандра с обучаемым 45.
Обучаемый с помощью комплекта средств связи скафандра 45, подключенного к средствам связи 6 пульта контроля и управления 5, имеет возможность вести речевой обмен с инструктором (врачом) стенда, которые в процессе тренировки выполняют роль как специалистов Центра управления полетами, так и других членов экипажа МКС, находящихся внутри орбитальных модулей.
В процессе тренировки с помощью датчиков, закрепленных на теле обучаемого, и комплекта медицинской аппаратуры скафандра снимаются сигналы электрокардиограммы, пневмограммы и значения температуры тела, которые через средства медицинского контроля 41 поступают в персональный компьютер врача 11 пульта контроля и управления 5, позволяя врачу стенда осуществлять в реальном масштабе времени достоверный контроль психофизиологического состояния обучаемого.
За отработкой процедур и упражнений по внекорабельной деятельности обучаемого в процессе тренировки инструктором осуществляется дистанционное визуальное наблюдение с помощью комплекта телекамер наблюдения 3. Кроме этого, телекамера, установленная на шлеме скафандра 45, предоставляет инструктору дополнительную возможность наблюдения за действиями обучаемого непосредственно в его рабочей зоне, что позволяет значительно более объективно оценивать правильность выполнения конкретных операций и упражнений.
Работа в условиях пониженной гравитации
Параметры набора начальных условий тренировки из персонального компьютера инструктора 9 с помощью локальной вычислительной сети передачи данных 17 поступают в сервер моделирования 1 и графические станции системы визуализации 40. При этом в сервере моделирования 1 активируется программный модуль, обеспечивающий моделирование пониженной гравитации (0,165 от земной для Луны и 0,378 - для Марса). Одновременно программное обеспечение высокопроизводительных графических станций системы визуализации 40 синтезирует изображение окружающего Лунного (Марсианского) пейзажа, которое с помощью видеопроекторов проецируется на экран.
Обучаемый в скафандре 45, стоя, например, на участке, имитирующем поверхность Луны 37, начинает движение. Анализ опыта работы американских астронавтов на Луне (см. Техническое предложение ООО «Центр тренажеростроения и подготовки персонала» ЦТКФ.161454.081 ПЗ Динамический стенд «Селен». Модернизация. Пояснительная записка, 2010 год) показал, что характерная для земных условий походка на Луне является неудобной. Так как используемый скафандр характеризуется тем, что помимо жесткой конструкции он имеет смещение центра тяжести вверх и несколько назад, то, чтобы не потерять равновесие в жестком скафандре, астронавту при ходьбе необходимо существенно наклонятся вперед. Кроме этого, пониженное по сравнению с земным сцепление подошв обуви с лунным грунтом несколько снижает скорость движения астронавта на поворотах, однако при приобретении им определенных навыков привычная скорость движения при поворотах все же достигается. В стенде требуемые наклоны вперед и повороты обучаемого в скафандре 45 обеспечиваются соответственно с помощью одностепенного шарнирного подвеса 35 и упорного подшипника 32. А при необходимости отработки наклонов и падений обучаемого в скафандре 45 на левый или правый бок используется шарнирный подвес 35 с двумя степенями свободы. Для исключения возможности перекручивания шланга 51 (см. фиг.2) средств обеспечения жизнедеятельности 42 угол поворота обучаемого в скафандре 45 следует ограничивать (не более 180º как против часовой стрелки, так и по часовой стрелке). Контроль за текущим углом поворота (то есть углом положения обучаемого в скафандре 45 по курсу) осуществляется как в автоматическом режиме программным обеспечением сервера моделирования 1 по значениям, получаемым от датчика абсолютного пространственного положения скафандра 44 (с выдачей соответствующей предупредительной информации, например, на монитор персонального компьютера инженера 10 пульта контроля и управления 5 или на средства отображения информации коллективного пользования 4), так и непосредственно инструктором стенда при визуальном наблюдении за действиями обучаемого с помощью комплекта телекамер наблюдения 3.
На стенде при отработке передвижений по имитируемой поверхности Луны функционирование системы активного силокомпенсирующего обезвешивания обучаемого в скафандре 45 при перемещениях по вертикали (компенсация гравитационных сил Лунного притяжения) и в горизонтальной плоскости (компенсация сил трения в механических передачах и инерции масс подвижных элементов механической части стенда) по трем степеням свободы и пассивная подвижность при угловых перемещениях по курсу и тангажу аналогичны функционированию в условиях невесомости. Очевидно только, что при движении по имитируемой поверхности Луны обучаемый космонавт (астронавт) создает усилия преимущественно отталкивания, причем в основном ногами, а моделируемые динамические характеристики перемещений в условиях имитируемых невесомости и пониженной гравитации Луны существенно отличаются.
На стенде помимо тренировок для приобретения навыков хождения по имитируемой поверхности Луны предполагается также выполнять следующие экспериментальные исследования и учебные задачи: бег вприпрыжку и скачки по ровной (наклонной) как по твердой, так и по мягкой поверхности (песок, вязкий грунт и пыль) при отсутствии (при наличии) препятствий; падение вперед, назад, вправо или влево и подъем после этого на ноги; наклоны вперед и опускание на одно или оба колена и подъем после этого на ноги; спуск и подъем по трапу; перемещение (переноска) макетов различных приборов и оборудования, имеющихся в составе участка, имитирующего поверхность Луны, с комплектами учебного оборудования 37.
Аналогичные экспериментальные исследования и учебные задачи предполагается отрабатывать и на участке, имитирующем поверхность Марса, с комплектом учебного оборудования 46.
Ввод отказов.
Для инструктора в процессе тренировки с пульта контроля и управления тренировкой 1 предусмотрена возможность ввода следующих основных отказов на выбор или в требуемой комбинации:
- отказ отдельных органов управления (тумблеры, кнопки и т.д.) и отдельных средств отображения информации (индикаторы, транспаранты и т.д.) пульта управления космического грузового манипулятора 28;
- отказ отдельных электромеханических приводов грузовой стрелы космического грузового манипулятора 28.
Для имитации отказов органов управления, средств отображения информации и электромеханических приводов в зависимости от выполняемого сценария тренировки инструктор производит с помощью персонального компьютера инструктора 9, установленного в пульте контроля и управления 5, по сети «Ethernet» блокирование обработки необходимых каналов ввода-вывода аналоговых и дискретных сигналов в контроллере комплекса устройств сопряжения с объектом 18.
Кроме этого, возможна имитация отказа средств речевой связи обучаемого с инструктором (путем отключения пультов абонентов средств связи 6 пульта контроля и управления 5), а также предусмотрена возможность (под контролем врача стенда с помощью средств обеспечения жизнедеятельности 42) имитации отказов отдельных элементов оборудования скафандра с обучаемым 45, например останов насоса системы жидкостного терморегулирования микроклимата внутри скафандра.
Останов и завершение работы стенда.
Инструктор, выполнив требуемый сценарий тренировки, производит останов и выдает команду на завершение работы.
К техническим результатам, полученным в предлагаемом изобретении, относятся следующие функциональные возможности стенда:
- проведение всесторонних экспериментальных исследований (экспериментальная отработка испытателями различных вариантов и выбор наиболее эффективных операций и приемов реальной внекорабельной деятельности экипажей МКС) и формирование соответствующих результатам исследований оптимальных методик подготовки космонавтов (астронавтов);
- изучение устройства, конструкции и компоновки штатных выходных скафандров Российского сегмента МКС для внекорабельной деятельности типа «Орлан», подготовка скафандра к использованию, работа в скафандре, управление его системами в штатных режимах и в нештатных ситуациях;
- изучение устройства, конструкции и компоновки оборудования, навесных механизмов и приборов, поручней и средств фиксации на внешней поверхности фрагмента макета орбитального модуля (стыковочный отсек - модуль СО-1 «Пирс», исследовательский модуль МИМ-2 «Поиск» и т.д. МКС);
- изучение устройства, конструкции и возможностей по управлению действующим макетом космического грузового манипулятора (манипулятор «Стрела» Российского сегмента МКС);
- знакомство с участками, характерными для поверхности Луны, назначением и устройством комплектов учебного оборудования;
знакомство с участками, характерными для поверхности Марса, назначением и устройством комплектов учебного оборудования;
- «погружение» обучаемого в интерактивное безопорное пространство с пятью степеням свободы в условиях имитируемой «полной» невесомости открытого космоса;
- активное силокомпенсирующее обезвешивание обучаемого в скафандре при перемещениях по вертикали (компенсация гравитационных сил Земного притяжения) и в горизонтальной плоскости (компенсация сил трения в механических передачах и инерции масс подвижных элементов механической части стенда) по трем степеням свободы и возможность угловых перемещений (пассивная подвижность) по курсу и тангажу (еще две степени свободы);
- обеспечение возможности приобретения обучаемыми устойчивых перцептуальных (распознавательных) и сенсорно-моторных (исполнительных) навыков по закреплению в рабочей зоне при работе с оборудованием, навесными механизмами и приборами, установленными на внешней поверхности орбитального модуля МКС, в том числе с космическим грузовым манипулятором;
- проведение экспериментальных исследований с обучаемым в скафандре в условиях, имитирующих пониженную гравитацию на поверхности Луны (Марса) с пятью степенями свободы по отработке способов передвижения и приобретению обучаемыми космонавтами (астронавтами) устойчивых перцептуальных (распознавательных) и сенсорно-моторных (исполнительных) навыков при работе с комплектами учебного оборудования;
- обеспечение возможности дополнения реального оборудования стенда элементами виртуальной реальности (так называемая дополненная реальность), например изображение орбитального модуля (модулей) МКС, груз для космического манипулятора, лунный пейзаж и т.д.;
- обеспечение жизнедеятельности обучаемого в штатном скафандре длительное время (до 8 часов), достаточное для решения учебно-тренировочных задач любого уровня сложности;
- обеспечение возможности имитации ведения речевых переговоров обучаемого в скафандре с остальными членами экипажа МКС и со специалистами Центра управления полетами;
- моделирование светотеневой обстановки, характерной для космических объектов, которые находятся на орбите Земли, а также для объектов на поверхности Луны (Марса);
- обеспечение возможности всестороннего контроля и эффективного управления ходом тренировок на стенде с помощью пульта контроля и управления, дополненное возможностью дистанционного визуального наблюдения за деятельностью обучаемых, а также за конкретными действиями обучаемого непосредственно в его рабочей зоне;
- обеспечение достоверного контроля психофизиологического состояния обучаемого в реальном масштабе времени профессиональным специалистом-врачом.
Промышленная применимость изобретения определяется тем, что предлагаемый стенд может быть изготовлен на базе известных комплектующих изделий и технологического оборудования.
Предлагаемое техническое решение в полном объеме предполагается практически реализовать в программно-техническом комплексе (поставка по документу ЦТКФ.161454.081), предназначенном для модернизации динамического стенда «Селен» (см. Web-страницу журнала «Новости космонавтики»: Лунный стенд для марсиан, http://www.novosti-kosmonavtiki.ru/content/numbers/249/05.shtml) в ОАО «Ракетно-космическая корпорация «Энергия» им.С.П.Королева».
Таким образом, предлагаемый стенд является высокотехнологичной разработкой и обладает весьма широкими функциональными возможностями, обеспечивая на стендовой базе ОАО «Ракетно-космическая корпорация «Энергия» им.С.П.Королева» поэтапный процесс всесторонней высокопрофессиональной подготовки экипажей МКС к эффективной работе в открытом космическом пространстве на орбите Земли, использованию манипулятора «Стрела», установленного на стыковочном отсеке - модуле СО-1 «Пирс» и исследовательском модуле МИМ-2 «Поиск» МКС, и подготовку космонавтов (астронавтов) к грядущему освоению Луны (Марса).
На основании вышеизложенного и по результатам проведенного патентно-информационного поиска считаем, что предлагаемый функционально-моделирующий стенд отвечает критериям «Новизна», «Изобретательский уровень» и «Промышленная применимость» и может быть защищен патентом РФ на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| ТРЕНАЖЕР ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ КОСМОНАВТОВ | 2012 |
|
RU2506648C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| УЧЕБНЫЙ ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ К ВНУТРИКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ | 2020 |
|
RU2738489C1 |
| КОСМОЦЕНТР | 2012 |
|
RU2505864C2 |
| ИНТЕГРИРОВАННЫЙ УЧЕБНО-ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ РОССИЙСКИХ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2559872C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| ТРЕНАЖЁРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМИЧЕСКИХ КОРАБЛЕЙ К ДЕЙСТВИЯМ ПОСЛЕ ПОСАДКИ ПИЛОТИРУЕМОЙ КАПСУЛЫ НА МОРЕ С ВОЛНЕНИЕМ | 2020 |
|
RU2734659C1 |
| УЧЕБНЫЙ ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМОНАВТОВ К ПРОВЕДЕНИЮ НАУЧНЫХ ИССЛЕДОВАНИЙ НА БОРТУ МКС | 2015 |
|
RU2617433C2 |
| МОДУЛЬ ИМИТАТОР ПОВЕРХНОСТИ МАРСА НАЗЕМНОГО ЭКСПЕРИМЕНТАЛЬНОГО КОМПЛЕКСА ДЛЯ МОДЕЛИРОВАНИЯ ДЛИТЕЛЬНЫХ КОСМИЧЕСКИХ ПОЛЕТОВ | 2009 |
|
RU2430862C2 |

Изобретение относится к космонавтике. Стенд включает сервер моделирования 1, консоль оператора 2, комплект телекамер наблюдения 3, средства отображения информации коллективного пользования 4, пульт контроля и управления 5, который состоит из средства связи 6, панели управления освещением 7, панели ручного управления электроприводами 8, персонального компьютера инструктора 9, персонального компьютера инженера 10, персонального компьютера врача 11 и второго блока цифровой связи 12. Стенд также включает в себя различные элементы, необходимые для внекорабельной деятельности и последующей подготовки космонавтов (астронавтов) экипажей МКС к выполнению перемещений и различных технологических операций в условиях полной невесомости открытого космического пространства, а также в условиях пониженной гравитации на спутнике Земли Луне и на других космических объектах Солнечной системы. В результате расширяются функциональные возможности стенда, условия тренировки максимально приближены к реальным условиям невесомости открытого космического пространства. 2 ил., 2 фото.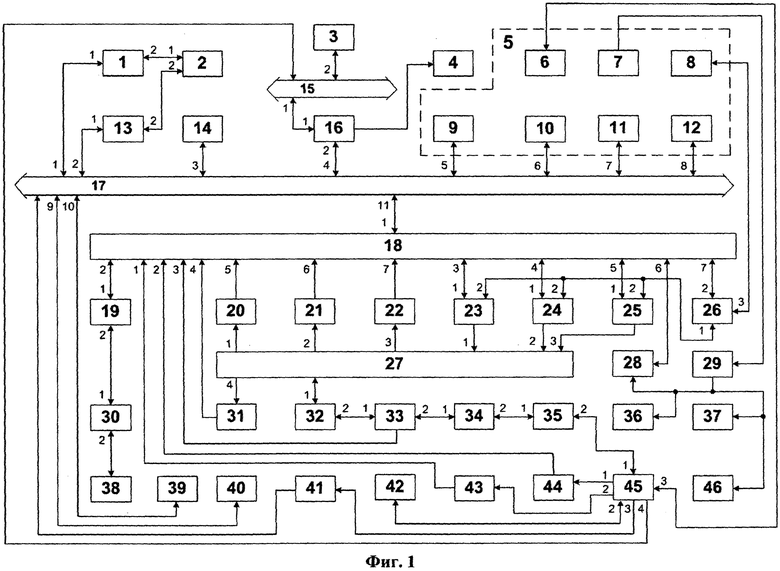
Функционально-моделирующий стенд для создания условий интерактивного безопорного пространства и пониженной гравитации, содержащий механическое передаточное устройство, датчик усилия и скафандр, предназначенный для размещения обучаемого, отличающийся тем, что в него введены сервер моделирования, консоль оператора, комплект телекамер наблюдения, средства отображения информации коллективного пользования, пульт контроля и управления, состоящий из средств связи, панели управления освещением, панели ручного управления электроприводами, персонального компьютера инструктора, персонального компьютера инженера, персонального компьютера врача, второго блока цифровой связи; сервер системы управления электроприводами, первый блок цифровой связи, локальная вычислительная сеть системы видеонаблюдения, сервер системы видеонаблюдения, локальная вычислительная сеть передачи данных, комплекс устройств сопряжения с объектом, первый адаптер беспроводной связи, набор каскадов концевых выключателей, датчик положения тележки, датчик положения моста, комплектный электропривод вертикального перемещения, комплектный электропривод перемещения тележки, комплектный электропривод перемещения моста, панель автоматики электроприводов, космический грузовой манипулятор, средства освещения, второй адаптер беспроводной связи, датчик отклонения, упорный подшипник, демпфирующее устройство, одностепенной шарнирный подвес, фрагмент макета орбитального модуля, участок, имитирующий поверхность Луны, с комплектом учебного оборудования, мобильный пульт управления электроприводами, третий блок цифровой связи, система визуализации, средства медицинского контроля, средства обеспечения жизнедеятельности, датчик положения скафандра по вертикали, датчик абсолютного пространственного положения скафандра и участок, имитирующий поверхность Марса, с комплектом учебного оборудования;
к первому входу-выходу консоли оператора подключен второй вход-выход сервера моделирования, ко второму входу-выходу - второй вход-выход сервера системы управления электроприводами;
к первому входу-выходу локальной вычислительной сети системы видеонаблюдения подключен первый вход-выход сервера системы видеонаблюдения, ко второму входу-выходу - вход-выход комплекта телекамер наблюдения; выход сервера системы видеонаблюдения подключен к входу средств отображения информации коллективного пользования;
панель управления освещением через средства освещения подключена к входам космического грузового манипулятора, фрагмента макета орбитального модуля, участка, имитирующего поверхность Луны, с комплектом учебного оборудования и участка, имитирующего поверхность Марса, с комплектом учебного оборудования;
вход-выход панели ручного управления электроприводами через панель автоматики электроприводов подключена ко вторым входам-выходам комплектного электропривода вертикального перемещения, комплектного электропривода перемещения тележки и комплектного электропривода перемещения моста;
к первому входу-выходу локальной вычислительной сети передачи данных подключен первый вход-выход сервера моделирования, ко второму входу-выходу - вход-выход сервера системы управления электроприводами, к третьему входу-выходу - вход-выход первого блока цифровой связи, к четвертому входу-выходу - второй вход-выход сервера системы видеонаблюдения, к пятому входу-выходу - вход-выход персонального компьютера инструктора, к шестому входу-выходу - вход-выход персонального компьютера инженера, к седьмому входу-выходу - вход-выход персонального компьютера врача, к восьмому входу-выходу - вход-выход второго блока цифровой связи, к девятому входу-выходу - вход-выход системы визуализации, к десятому входу-выходу - вход-выход третьего блока цифровой связи, к одиннадцатому входу-выходу - первый вход-выход комплекса устройств сопряжения с объектом, к входу - выход средств медицинского контроля;
вход-выход мобильного пульта управления электроприводами через второй адаптер беспроводной связи подключен ко второму входу-выходу первого адаптера беспроводной связи;
ко второму входу-выходу комплекса устройств сопряжения с объектом подключен первый вход-выход первого адаптера беспроводной связи, к третьему входу-выходу - первый вход-выход комплектного электропривода вертикального перемещения, к четвертому входу-выходу - первый вход-выход комплектного электропривода перемещения тележки, к пятому входу-выходу - первый вход-выход комплектного электропривода перемещения моста, к шестому входу-выходу - вход-выход космического грузового манипулятора, к седьмому входу-выходу - второй вход-выход панели автоматики электроприводов, к первому входу - выход датчика положения скафандра по вертикали, ко второму входу - выход датчика абсолютного пространственного положения скафандра, к третьему входу - информационный выход датчика усилия, к четвертому входу - выход датчика отклонения, к пятому входу - выход набора каскадов концевых выключателей, к шестому входу - выход датчика положения тележки, а к седьмому входу - выход датчика положения моста;
к первому выходу механического передаточного устройства подключен вход набора каскадов концевых выключателей, ко второму выходу - вход датчика положения тележки, к третьему выходу - вход датчика положения моста, к четвертому выходу - вход датчика отклонения, к первому входу - выход комплектного электропривода вертикального перемещения, ко второму входу - выход комплектного электропривода перемещения тележки, к третьему входу - выход комплектного электропривода перемещения моста, к входу-выходу - через последовательно соединенные упорный подшипник, датчик усилия, демпфирующее устройство и одностепенной шарнирный подвес - первый вход-выход скафандра, предназначенного для размещения обучаемого;
ко второму входу-выходу скафандра, предназначенного для размещения обучаемого, подключен вход-выход средств обеспечения жизнедеятельности, к третьему входу-выходу - вход-выход средств связи, к первому выходу - вход датчика абсолютного пространственного положения скафандра, ко второму выходу - вход датчика положения скафандра по вертикали, к третьему выходу - вход средств медицинского контроля, к четвертому выходу - вход локальной вычислительной сети системы видеонаблюдения.
| Способ жидкостной обработки кож и аппарат для его осуществления | 1954 |
|
SU102823A2 |
| Рентгеновский томофлюорограф | 1948 |
|
SU81361A1 |
| Способ производства древесных пластиков для подшипников | 1953 |
|
SU104360A1 |
| US 4678438 A, 07.07.1987 | |||

