Изобретение относится к разделу пилотируемой космонавтики - космическому тренажеростроению и, в частности, к наземным техническим средствам, предназначенным для подготовки космонавтов к работе в открытом космосе на орбите Земли.
Известна многофункциональная система имитации космического корабля (Европейская патентная заявка CN 202042069 U, MULTI-ROLE SPACE SIMULATION SYSTEM AND SPACE SHIP SIMULATION SYSTEM, Int. Class.: G09B 9/52, H04L 29/06, Priority Data: 05.03.2011, Applicants: BEIJING SUPER VIEW TECHNOLOGY CO LTD [CN]), содержащая систему имитации бортовых систем космического корабля и отдельных факторов космического пространства, функционирующую на базе сервера, сетевые коммуникационные устройства и персональные компьютеры обучаемых с основным и дополнительным дисплеями и с устройством управления компьютером.
Известен также «Стенд подготовки экипажей международной космической станции с использованием элементов виртуальной реальности» (см. Web-страницу ФГБУ «НИИ ЦПК им. Ю. А. Гагарина»: http://www.gctc.ru/main.php?id=l35), обеспечивающий моделирование бортовых систем и погружение в виртуальный мир Российского сегмента Международной космической станции, а также отработку группового взаимодействия членов экипажа при их совместной работе по эксплуатации и ремонту бортовых систем.
Недостатком данных систем является то, что они, относясь к автоматизированным обучающим системам, использующим синтезированные изображения бортового оборудования и отдельных факторов космического пространства (на базе технологий виртуальной реальности), предназначены, преимущественно, для теоретической и первоначальной практической подготовки (так называемой предтренажерной подготовки: знакомство с устройством космического аппарата и принципами его управления, привитие первоначальных навыков по управлению космическим аппаратом, визуализация процессов и явлений космического пространства и т.д.). В составе этих систем отсутствуют штатные органы управления и средства отображения информации (или органы управления и средства отображения информации в тренажном исполнении, внешне полностью идентичные штатным), что не позволяет обеспечить приобретение обучаемыми операторами устойчивых сенсорно-моторных навыков по управлению космическим аппаратом. В то же время огромным преимуществом систем, использующих технологии виртуальной реальности, является практически неограниченная возможность наглядной демонстрации обучаемым космического пространства и условий космического полета, например, невесомости, солнечной радиации, перепада температур, метеорной пыли, перегрузки и т.д.
Также известны система и метод для автономной подготовки астронавтов (Международная патентная заявка WO 2004109623, SYSTEM AND METHOD FOR AUTONOMOUS TRAINING, Int. Class.: A63B 24/00, G09B 9/00, G09B 9/52, Priority Data: 16.12.2004, Applicants: CANADIAN SPACE AGENCY [CA]), содержащая моделирующий компьютер, ручку управления движением, ручку управления угловым положением, базу данных: с параметрами движения реального объекта и моделируемыми параметрами движения объекта, с базовыми (эталонными) и текущими уровнями профессиональной подготовки астронавта, графический компьютер с тремя графическими акселераторами и три видеодисплея.
Недостатком данной системы является то, что она относится к автоматизированным обучающим системам, в которых для создания рабочего места обучаемого используется только несколько штатных компонентов (ручка управления движением и ручка управления угловым положением) без воспроизведения интерьера или даже без имитации рабочей зоны макета кабины реального космического корабля (реального модуля орбитальной космической станции), что значительно снижает эффективность подготовки.
Помимо этого известен космический тренажер (Патент на изобретение РФ №2367027, ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ, МПК: G09B 9/52 (2006.01), Дата начала отсчета срока действия патента: 05.02.2008, Патентообладатель: Общество с ограниченной ответственностью «Центр тренажеростроения и подготовки персонала» (RU)), состоящий из пульта контроля и управления тренировкой, модели командной радиолинии, модели датчиков, модели измерителя линейного ускорения, модели движения космического корабля, модели исполнительных органов комбинированной двигательной установки, модели бортового цифрового вычислительного комплекса, модели системы управления бортовым комплексом, первого блока формирования форматов и пульта космонавтов, а также дополнительно содержит модель движения космической станции, модель системы взаимных измерений, первый, второй и третий формирователи визуальной обстановки, модель построителя местной вертикали, второй блок формирования форматов, устройства сопряжения с объектом, модель блока управления перемещением объекта, формирователь акустической обстановки, рабочее место экипажа, состоящее из макета кабины спускаемого аппарата пилотируемого космического корабля и включающее телекамеру наблюдения, средства имитации связи «Борт-Земля», ручку управления движением, визир специальный космонавта, ручку управления ориентацией, акустическую систему, первый и второй визуальный иллюминаторы, кресло бортинженера, кресло командира корабля и кресло космонавта-исследователя.
Данный тренажер ориентирован, преимущественно, на обеспечение практической профессиональной подготовки космонавтов к выполнению только наиболее ответственных операций по пилотированию (сближение, причаливание и стыковка с орбитальным модулем Международной космической станции) транспортного космического корабля типа «Союз-ТМА» (то есть профессиональная деятельность космонавта, находящегося исключительно внутри космического аппарата). Причем имитация космических условий в тренажере реализована только путем визуализации внешней обстановки в иллюминаторах спускаемого аппарата космического корабля.
Известны устройства (Патент на полезную модель РФ №104360, ОБУЧАЮЩЕЕ УСТРОЙСТВО, МПК: G09B 9/16 (2006.01), B64G 7/00 (2006.01), Дата начала отсчета срока действия патента: 04.02.2011, Патентообдадатель: Федеральное Государственное Унитарное Предприятие Научно-Исследовательский Институт Авиационного оборудования (ФГУП НИИ АО) (RU) и Патент на полезную модель РФ №81361, КОМПЛЕКСНОЕ ОБУЧАЮЩЕЕ УСТРОЙСТВО, МПК: G09B 1/00 (2006.01), Дата начала отсчета срока действия патента: 17.12.2008, Патентообдадатель: ФГУП НИИАО (RU)), а также тренажер (Патент на изобретение РФ №2254617, ДИНАМИЧЕСКИЙ ТРЕНАЖЕР, МПК 7: G09B 9/10, Дата начала отсчета срока действия патента: 02.09.2003, Патентообдадатель: ФГУП НИИАО (RU)), в которых в динамическом режиме работы с помощью управляемой центрифуги имитируется один из факторов космического полета, а именно воздействие перегрузки на космонавта, находящегося в космическом корабле «Союз-ТМА», на этапе управляемого спуска.
Однако во всех рассмотренных выше технических средствах подготовки отсутствует имитация такого важного фактора космического полета, как невесомость и, соответственно, не обеспечивается приобретение обучаемыми космонавтами сенсорно-моторных навыков при выполнении операций в открытом космосе, то есть при осуществлении так называемой внекорабельной деятельности.
Известны устройство (Международная патентная заявка №ЕР 1231139, DEVICE FOR THE SIMULATION OF VARIABLE GRAVITY ACCELERATIONS, IPC: B64D 47/00, B64G 7/00, Publication Date: 13.02.2001, Applicant: EADS SPACE TRANSP GMBH [DE]) и способ (Патент на изобретение РФ №2099256, СПОСОБ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СОВЕРШЕНСТРУЮЩИЙ СОСТОЯНИЕ ИСКУССТВЕННОЙ НЕВЕСОМОСТИ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА, МПК 6: B64G 7/00, Опубликовано: 20.12.1997, Патентообладатель: Сантр Насьональ Д'Этюд Спасьаль (FR)), а также летающие лаборатории (см. Web-страницу ФГБУ «НИИ ЦПК им. Ю. А. Гагарина»: http://www.gctc.ru/main.php?id=132), в которых для создания невесомости используется самолет, летящий по параболической траектории (по так называемой «параболе Кеплера»).
Основным недостатком данных устройств является сравнительная кратковременность имитации состояния невесомости (до 15 режимов невесомости, каждый длительностью ориентировочно 15-30 с, причем общее время пребывания в состоянии невесомости составляет не более 450 с), что позволяет обучаемым лишь ознакомиться с влиянием невесомости на организм, с особенностями пространственной ориентировки в безопорном пространстве и, в лучшем случае, выполнить только некоторые простейшие операции из комплекса процедур многочасовой внекорабельной деятельности.
Известны метод и устройство создания переменной силы тяжести с эффектом присутствия в виртуальной реальности (Международная патентная заявка №WO/2011/032363, METHOD AND APPARATUS OF VARIABLE G FORCE EXPERIENCE AND CREATE IMMERSIVE VR SENSATIONS, IPC: B64G 7/00, G09B 9/00, Publication Date: 24.03.2011, Applicant: XIAO, Quan [CN/CN]), а также устройство и метод для имитации ощущений, испытываемых в космическом пространстве (Международная патентная заявка №WO/2009/029657, APPARATUS AND METHOD OF SIMULATING A SOMATOSENSORY EXPERIENCE IN SPACE, IPC: B64G 7/00, Publication Date: 05.03.2009, Applicant: XIAO, Quan [CN/US]). Основным недостатком этих методов и устройств для их осуществления является необходимость использования гидросреды для обезвешивания обучаемого космонавта, помещенного в специальный скафандр.
Сравнительный анализ работы космонавтов в условиях открытого космоса и в гидросреде (см. Тренажерные комплексы и тренажеры. Технологии разработки и опыт эксплуатации / В.Е. Шукшунов, В.В. Циблиев, СИ. Потоцкий и др. Под ред. В.Е. Шукшунова. - М.: Машиностроение, 2005. - с.258-260) показывает, что при работе в гидросреде возникают дополнительные нагрузки на обучаемого (являющиеся предпосылками для привития некоторых так называемых «ложных навыков»), которые вызваны рядом факторов (необходимость крепления на скафандр грузов для создания нулевой плавучести, гидродинамическое сопротивление жидкости как при движениях рук, так и особенно ощутимое гидродинамическое сопротивление при перемещениях обучаемых космонавтов в гидросреде, в то время как в открытом космосе перемещение осуществляется по инерции и при отсутствии каких-либо сил сопротивления и т.д.).
Наиболее близким по технической сущности аналогом, принятым в качестве прототипа предлагаемого изобретения, является система управления (Патент на изобретение РФ №2355039, СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС, МПК G09B 9/00 (2006.01), Дата начала отсчета срока действия патента: 12.12.2007, Патентообдадатель: Государственное образовательное учреждение высшего профессионального образования "Южно-Российский государственный технический университет (Новочеркасский политехнический институт)", ГОУ ВПО ЮРГТУ (НПИ) (RU), содержащая скафандр с обучаемым, задатчик веса груза, датчик положения, индикатор нуля, индикатор отказа датчика усилия, задатчик момента электродвигателя, сумматор, устройство регулирования момента, электродвигатель, передаточное устройство, датчик усилия, блок выделения разности усилий, регулятор усилия, кнопка запуска коррекции, первый блок коррекции и ключ, датчик скорости и второй блок коррекции.
Механическая часть системы управления перемещением скафандра с обучаемым 1 на тренажере выхода в космос (представленная на фиг.2 Патента №2355039 и также называемая «передаточным устройством» 10 - см. фиг.1 этого же Патента №2355039) содержит электродвигатель 9 с подключенными к его валу датчиком положения 3 и датчиком скорости 17 (на фиг.2 Патента №2355039 не показаны), который через редуктор 19 соединен с барабаном 20 передаточного механизма 10. Кроме редуктора 19 и барабана 20 в состав передаточного механизма 10 входит выполненная в две ветви канатная передача 21, связанная через направляющие блоки 22, 23 и 24 с балансиром 25, который позволяет автоматически выравнивать длину ветвей канатов и удерживать скафандр с обучаемым 1 на весу даже в случае обрыва одной из ветвей канатной передачи. К нижнему блоку 24 подключен корпус датчика усилия 11, с которым соединен скафандр с обучаемым 1. К скафандру с обучаемым 1 подведен жгут из трубопроводов и электрических кабелей 26 с помощью нескольких пассивных тележек 27, которые позволяют удерживать жгут в подвешенном состоянии на раме 28 при горизонтальных перемещениях скафандра с обучаемым 1. Запасовка троса канатной передачи 21 с помощью направляющих блоков 22, 23 и 24 осуществляется таким образом, чтобы при перемещении скафандра с обучаемым 1 в горизонтальной плоскости не изменялась высота его подвеса. Верхние направляющие блоки 23 подвешены к каретке 29, относящейся к системе горизонтального перемещения скафандра с обучаемым 1. Каретка 29 перемещается по мосту 30 с помощью четырех опор 31 на воздушной пленке. Угловые перемещения мост 30 совершает с помощью узла поворота 32. При этом мост 30 с помощью четырех опор 33 на воздушной пленке опирается на стойки 34 с платформами 35. Подвод воздуха к опорам 31 и 33 на воздушной пленке осуществляется по шлангам питания (на фиг.2 Патента №2355039 не показаны).
Данная система, предназначенная для создания тренажера по подготовке к выходу в космос обучаемого космонавта в переходном (стыковочном) отсеке орбитального модуля Российского сегмента Международной космической станции и осуществлению его внекорабельной деятельности в открытом космосе, обеспечивает имитацию состояния невесомости в воздушной среде методом силокомпенсирующего обезвешивания космонавта в скафандре, перемещающегося в так называемом «безопорном пространстве» с тремя степенями свободы. В системе (см. фиг.2 Патента №2355039) для реализации вертикальных перемещений использован метод активного силокомпенсирующего обезвешивания (компенсация силы Земного притяжения путем использования управляемого электропривода), причем подвес скафандра с обучаемым 1 к каретке 29 выполнен с помощью специальной запасовки троса (так называемый «сдвоенный полиспаст») канатной передачи 21, благодаря чему обеспечивается независимость вертикальных и горизонтальных перемещений объекта обезвешивания. Ограничением системы является отсутствие возможности (из-за высокой сложности реализации) компенсации сил Земного притяжения рук космонавта, а также приборов и инструментов, которые используются космонавтом при выполнении тренировочного задания по внекорабельной деятельности, которое однако несколько «сглаживается» относительной жесткостью рукавов и перчаток выходного скафандра, обусловленной их конструкцией, и наличием избыточного давления воздуха внутри скафандра и его рукавов по сравнению с внешней средой. То есть, использование системы силокомпенсирующего обезвешивания обеспечивает так называемую «полную» невесомость, только непосредственно космонавта в скафандре (только базовую функцию обезвешивания), без какой-либо компенсации сил притяжения отдельных конечностей космонавта, приборов и инструментов. В данной системе по Патенту №2355039, для реализации перемещений в горизонтальной плоскости используются два движения - вращательное движение моста 30, с расположенной на нем кареткой 29, с помощью узла поворота 32 на угол 90° вокруг оси стойки 34 и радиальное движение каретки 29 вдоль моста 30. Причем у каретки 29 и у моста 30 используются опоры 31 и 33 на воздушной пленке (в технической литературе чаще применяется термин на «воздушной подушке»), благодаря которым трение между ними и платформами 35 стоек 34 практически отсутствует, вследствие чего характер движений космонавта в горизонтальной плоскости в значительной мере соответствует особенностям передвижения в космосе.
Таким образом, в системе управления вертикальным перемещением обучаемого на тренажере выхода в космос использовано силокомпенсирующее обезвешивание скафандра с обучаемым активного типа для вертикального перемещения и пассивного - для перемещений в горизонтальной плоскости.
Система управления вертикальным перемещением обучаемого на тренажере выхода в космос не предоставляет ряд необходимых для современного тренажера профессионального уровня функций: во-первых, не обеспечивает жизнедеятельность обучаемого в скафандре, во-вторых, предоставляет возможность одновременной подготовки только для одного обучаемого, в-третьих, не предусматривает компоновку рабочего места обучаемых оборудованием, необходимым для подготовки к выходу в открытый космос; в-четвертых, не предусматривает компоновку рабочего места обучаемых оборудованием, необходимым для получения сенсорно-моторных навыков при работе в открытом космическом пространстве на орбите Земли, в-пятых, не предусматривает возможность контроля и управления ходом тренировки, в-шестых, не предусматривает возможность связи обучаемого с остальными членами экипажа и имитации связи со специалистами Центра управления полетами, в-седьмых, не обеспечивает возможность телевизионного наблюдения за обучаемым, в-восьмых, не предусматривает возможность моделирования светотеневой обстановки, характерной для космических объектов, которые находятся на орбите Земли, и, в-девятых, не обеспечивает психофизиологический контроль за обучаемым в реальном масштабе времени.
Целью изобретения является расширение функциональных возможностей предлагаемого тренажера внекорабельной деятельности космонавтов для обеспечения профессионального уровня подготовки космонавтов к выходу в открытый космос, выполнению перемещений и различных технологических операций (так называемая «внекорабельная деятельность» на орбите Земле) в условиях имитируемой «полной» невесомости открытого космического пространства.
Поставленная цель достигается тем, что в тренажер внекорабельной деятельности космонавтов, состоящий из первого узла поворота, первого датчика положения, первой системы управления перемещением, первой механической части системы управления перемещением, первого электродвигателя, первого датчика усилия, первого датчика скорости и первого скафандра с обучаемым, причем вход-выход первого узла поворота через последовательно соединенные первую механическую часть системы управления перемещением и первый датчик усилия подключен к первому входу-выходу первого скафандра с обучаемым; к первому входу первой системы управления перемещением через первый датчик положения подключен первый выход первой механической части системы управления перемещением, ко второму входу через первый датчик скорости - второй выход первой механической части системы управления перемещением, к третьему входу - выход первого датчика усилия; выход первой системы управления перемещением через первый электродвигатель подключен к входу первой механической части системы управления перемещением, введены пульт контроля и управления, вторая системы управления перемещением, средства связи, средств обеспечения жизнедеятельности обучаемых в скафандре, средств психофизиологического контроля, устройств сопряжения с объектом, пульт врача и рабочее место обучаемых, состоящее из второго узла поворота, второго датчика положения, второй механической части системы управления перемещением, второго электродвигателя, второго датчика усилия, второго датчика скорости, второго скафандра с обучаемым, комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля, комплект телекамер наблюдения, средств моделирования светотеневой обстановки и фрагмента макета орбитального модуля; вход-выход второго узла поворота через последовательно соединенные вторую механическую часть системы управления перемещением и второй датчик усилия подключен к первому входу-выходу второго скафандра с обучаемым; к первому входу второй системы управления перемещением 8 через второй датчик положения подключен первый выход второй механической части системы управления перемещением, ко второму входу через второй датчик скорости - второй выход второй механической части системы управления перемещением, к третьему входу - выход второго датчика усилия; выход второй системы управления перемещением через второй электродвигатель подключен к входу второй механической части системы управления перемещением; к первому входу-выходу пульта контроля и управления подключен первый вход-выход средств связи, ко второму входу-выходу - вход-выход пульта врача, к третьему входу-выходу - вход-выход комплекта телекамер наблюдения, к четвертому входу-выходу - первый вход-выход устройств сопряжения с объектом, к первому входу - первый выход первого скафандра с обучаемым, ко второму входу - выход средств обеспечения жизнедеятельности обучаемых в скафандре, к третьему входу - второй выход второго скафандра с обучаемым; ко второму входу-выходу средств связи подключен второй вход-выход первого скафандра с обучаемым, к третьему входу-выходу - второй вход-выход второго скафандра с обучаемым; к первому входу-выходу средств обеспечения жизнедеятельности обучаемых в скафандре подключен третий вход-выход первого скафандра с обучаемым, ко второму входу-выходу - третий вход-выход второго скафандра с обучаемым; второй вход-выход устройств сопряжения с объектом подключен к входу-выходу комплекту оборудования шлюзования переходного и стыковочного отсеков орбитального модуля; выход пульта контроля и управления через средства моделирования светотеневой обстановки подключен к входу фрагмента макета орбитального модуля; к первому входу средств психофизиологического контроля подключен второй выход первого скафандра с обучаемым, ко второму входу - первый выход второго скафандра с обучаемым, выход средств психофизиологического контроля подключен к входу пульта врача. Причем в состав рабочего места обучаемых включены первый узел поворота, первый датчик положения, первая механическая часть системы управления перемещением, первый электродвигатель, первый датчик усилия, первый датчик скорости и первый скафандр с обучаемым.
Сущность изобретения состоит в том, что в предлагаемом тренажере обеспечивается профессиональная подготовка одного или двух обучаемых, «одетых» в штатные выходные скафандры Российского сегмента МКС типа «Орлан» и «погруженных» в безопорное пространство с тремя степеням свободы в условиях имитируемой «полной» невесомости, по приобретению устойчивых сенсорно-моторных навыков при подготовке внутри орбитального отсека МКС к выходу в открытый космос, а также при выполнении совместных операций и процедур внекорабельной деятельности в открытом космическом пространстве.
Сущность изобретения поясняется графическими материалами.
На фиг.1 представлена функционально-структурная схема тренажера внекорабельной деятельности космонавтов.
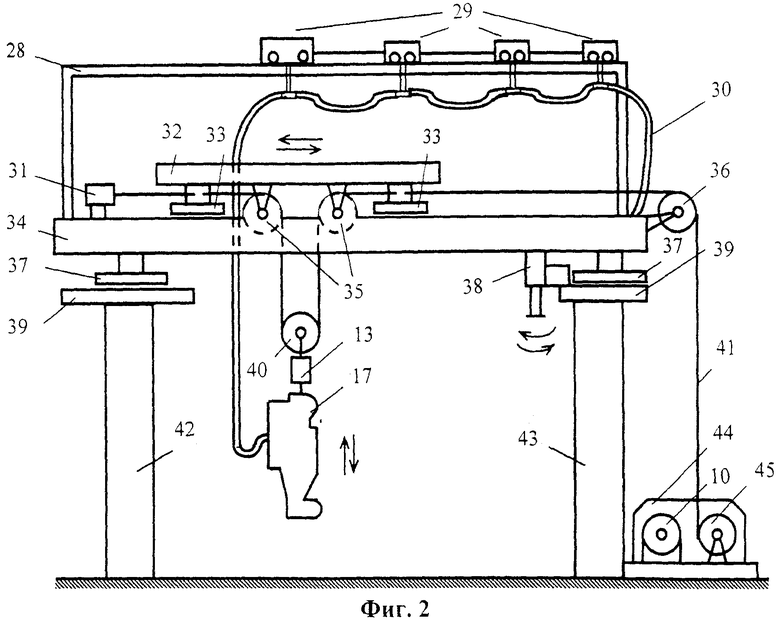
На фиг.2 представлен чертеж общего вида механической части системы перемещения обучаемого космонавта в тренажере с тремя степеням свободы.
А в приложении к данному описанию приведены фотографии 1-3.
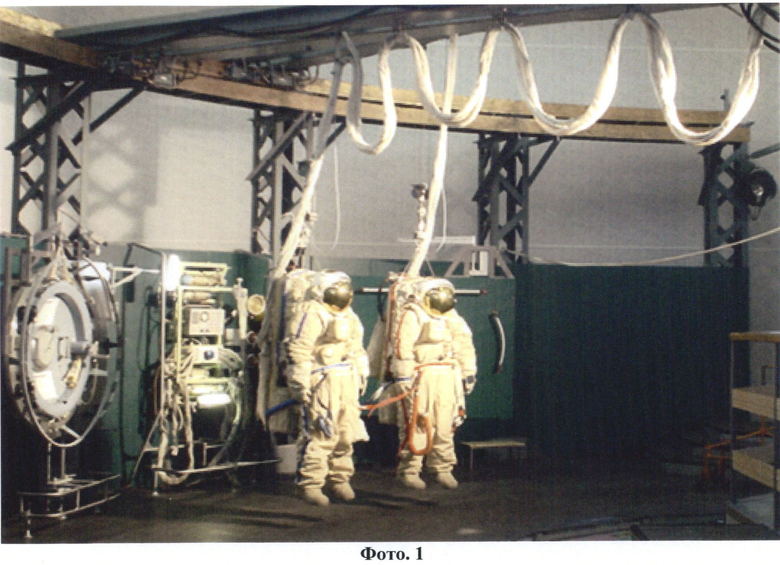
На фото 1 представлен общий вид рабочего места экипажа тренажера (это изображение принадлежит ФГБУ «НИИ ЦПК им. Ю. А. Гагарина», скопировано с Web-страницы: http://www.gctc.ru/main.php?id=l 45).
На фото 2 представлена фотография этапа надевания (или, точнее, «входа») обучаемого в выходной космический скафандр модели «Орлан-ДМА».
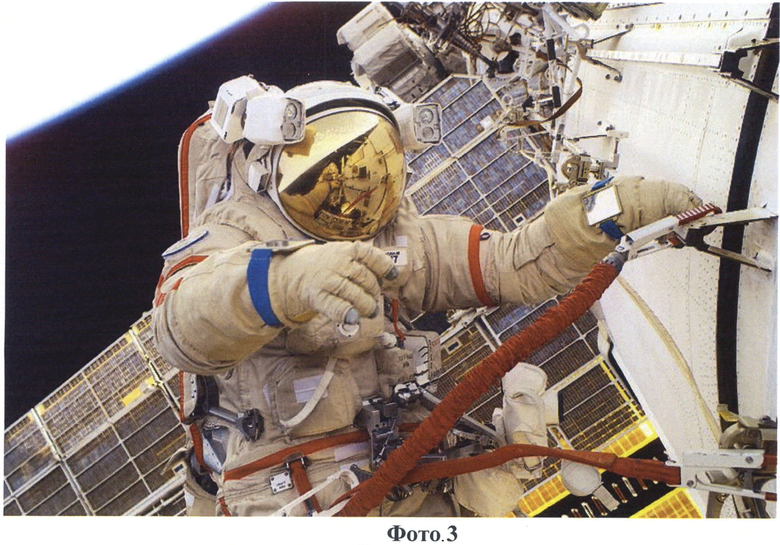
На фото 3 представлена фотография космонавта Сергея Крикалева во время работы в открытом космосе в скафандре модели «Орлан-М» (это изображение с наименованием «Attired in a Russian Orlan spacesuit, astronaut John Phillips participates in a session of extravehicular activity. Cosmonaut Sergei Krikalev is seen in Phillip's helmet visor» внесено в каталог Космического центра имени Джонсона Национального управления США по аэронавтике и исследованию космического пространства (NASA) под идентификатором (Photo ID): ISS011-Е-11949, дата: 18 августа 2005, http://ru.wikipedia.org/wiki/%D0%A4% D0%B0%D0%B9%D0%BB:ISS-1 l_Phillips_at_EVA.jpg).
Согласно фиг.1 тренажер включает пульт контроля и управления 1, рабочее место обучаемых 2, первый узел поворота 3, первый датчик положения 4, первую систему управления перемещением 5, второй узел поворота 6, второй датчик положения 7, вторую систему управления перемещением 8, первую механическую часть системы управления перемещением 9, первый электродвигатель 10, вторую механическую часть системы управления перемещением 11, второй электродвигатель 12, первый датчик усилия 13, первый датчик скорости 14, второй датчик усилия 15, второй датчик скорости 16, первый скафандр с обучаемым 17, средства связи 18, второй скафандр с обучаемым 19, средства обеспечения жизнедеятельности обучаемых в скафандре 20, средства психофизиологического контроля 21, устройства сопряжения с объектом 22, комплект оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, комплект телекамер наблюдения 24, средства моделирования светотеневой обстановки 25, фрагмент макета орбитального модуля 26 и пульт врача 27.
Вход-выход первого узла поворота 3 через последовательно соединенные первую механическую часть системы управления перемещением 9 и первый датчик усилия 13 подключен к первому входу-выходу первого скафандра с обучаемым 17. К первому входу первой системы управления перемещением 5 через первый датчик положения 4 подключен первый выход первой механической части системы управления перемещением 9, ко второму входу через первый датчик скорости 14 - второй выход первой механической части системы управления перемещением 9, к третьему входу - выход первого датчика усилия 13. Выход первой системы управления перемещением 5 через первый электродвигатель 10 подключен к входу первой механической части системы управления перемещением 9.
Вход-выход второго узла поворота 6 через последовательно соединенные вторую механическую часть системы управления перемещением 11 и второй датчик усилия 15 подключен к первому входу-выходу второго скафандра с обучаемым 19. К первому входу второй системы управления перемещением 8 через второй датчик положения 7 подключен первый выход второй механической части системы управления перемещением 11, ко второму входу через второй датчик скорости 16 - второй выход второй механической части системы управления перемещением 11, к третьему входу - выход второго датчика усилия 15. Выход второй системы управления перемещением 8 через второй электродвигатель 12 подключен к входу второй механической части системы управления перемещением 11.
К первому входу-выходу пульта контроля и управления 1 подключен первый вход-выход средств связи 18, ко второму входу-выходу - вход-выход пульта врача 27, к третьему входу-выходу - вход-выход комплекта телекамер наблюдения 24, к четвертому входу-выходу - первый вход-выход устройств сопряжения с объектом 22, к первому входу - первый выход первого скафандра с обучаемым 17, ко второму входу - выход средств обеспечения жизнедеятельности обучаемых в скафандре 20 к третьему входу - второй выход второго скафандра с обучаемым 19.
Ко второму входу-выходу средств связи 18 подключен второй вход-выход первого скафандра с обучаемым 17, к третьему входу-выходу - второй вход-выход второго скафандра с обучаемым 19.
К первому входу-выходу средств обеспечения жизнедеятельности обучаемых в скафандре 20 подключен третий вход-выход первого скафандра с обучаемым 17, ко второму входу-выходу - третий вход-выход второго скафандра с обучаемым 19.
Второй вход-выход устройств сопряжения с объектом 22 подключен к входу-выходу комплекту оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23.
Выход пульта контроля и управления 1 через средства моделирования светотеневой обстановки 25 подключен к входу фрагмента макета орбитального модуля 26.
К первому входу средств психофизиологического контроля 21 подключен второй выход первого скафандра с обучаемым 17, ко второму входу - первый выход второго скафандра с обучаемым 19, выход средств психофизиологического контроля 21 подключен к входу пульта врача 27.
Причем первый узел поворота 3, первый датчик положения 4, второй узел поворота 6, второй датчик положения 7, первая механическая часть системы управления перемещением 9, первый электродвигатель 10, вторая механическая часть системы управления перемещением 11, второй электродвигатель 12, первый датчик усилия 13, первый датчик скорости 14, второй датчик усилия 15, второй датчик скорости 16, первый скафандр с обучаемым 17, второй скафандр с обучаемым 19, комплект оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, комплект телекамер наблюдения 24, средства моделирования светотеневой обстановки 25 и фрагмент макета орбитального модуля 26 включены в состав рабочего места обучаемых 2.
Согласно фиг.2 каждая из механических частей системы перемещения обучаемого космонавта в тренажере с тремя степеням свободы (на фиг.1 обозначены позициями 9 и 11) включает электродвигатель 10 с подключенными к его валу датчиком положения 4 и датчиком скорости 14 (см. фиг.1, так как датчики положения 4 и скорости 14 на фиг.2 не показаны), который через редуктор 44 соединен с барабаном 45 передаточного механизма. Кроме редуктора 44 и барабана 45 в состав передаточного механизма входит выполненная в две ветви канатная передача 41, связанная через направляющие блоки 36, 35 и 40 с балансиром 31, который позволяет автоматически выравнивать длину ветвей канатов и удерживать скафандр с обучаемым 17 на весу даже в случае обрыва одной из ветвей канатной передачи. К нижнему блоку 40 подключен корпус датчика усилия 13, с которым соединен скафандр с обучаемым 17. К скафандру с обучаемым 17 подведен жгут из трубопроводов и электрических кабелей 30 с помощью четырех пассивных тележек 29, которые позволяют удерживать жгут в подвешенном состоянии на раме 28 при горизонтальных перемещениях скафандра с обучаемым 17. Запасовка троса канатной передачи 41 с помощью направляющих блоков 36, 35 и 40 осуществляется таким образом, чтобы при перемещении скафандра с обучаемым 17 в горизонтальной плоскости не изменялась высота его подвеса. Верхние направляющие блоки 35 подвешены к каретке 32, относящейся к системе горизонтального перемещения скафандра с обучаемым 17. Каретка 32 перемещается по мосту 34 с помощью четырех опор 37 на воздушной пленке. Угловые перемещения мост 34 совершает с помощью узла поворота 38 вокруг оси стойки 42 на угол 90°. При этом мост 34 с помощью четырех опор 33 на воздушной пленке опирается на стойки 42 и 43 с платформами 39 (причем платформа 39 у стойки 42 представляет собой полосу в четверть плоского кольца). Подвод воздуха к опорам 33 и 37 на воздушной пленке осуществляется по шлангам сжатого воздуха от компрессора (на фиг.2 не показаны).
Пульт контроля и управления 1, обеспечивающий размещение двух инструкторов и инженера за эргономичными автоматизированными рабочими местами, реализован на базе трех персональных компьютеров. Для обеспечения связи инструкторов (выполняющих на тренажере роль специалистов Центра управления полетами или членов экипажа, находящихся в орбитальных отсеках МКС) с обучаемыми, располагающимися в скафандрах, в состав пульта контроля и управления тренировкой 1 включены средства связи (пульты абонента и блоки контрольных громкоговорителей), а для осуществления дистанционного визуального наблюдения за действиями обучаемых - средства телевизионного наблюдения (коммутатор телевизионных сигналов, пульты управления телекамерами наблюдения и два видеоконтрольных устройства). Кроме того, в состав пульта контроля и управления тренировкой 1 включены устройства отображения информации, поступающей от средств обеспечения жизнедеятельности обучаемых в скафандре 20, и панель управления средствами моделирования светотеневой обстановки 25. Пульт контроля и управления тренировкой 1 предназначен для задания сценария и начальных условий тренировки, запуска и оперативного контроля хода тренировки, ввода отказов, а также останова и завершения тренировки.
Рабочее место обучаемых 2 (см. фото 1) представляет собой выделенное помещение, в котором в единой конструкции скомпонованы: два комплекта механических частей системы перемещения по трем степеням свободы 9 и 11 для двух скафандров с обучаемыми 17 и 19, приводимые в движение электродвигателями 10 и 12 и контролируемые датчиками 4, 7, 13, 14, 15 и 16; комплект оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, комплект телекамер наблюдения 24, средства моделирования светотеневой обстановки 25 и фрагмент макета орбитального модуля 26.
Первый 3 и второй 6 узлы поворота, предназначенные для перемещения/поворота вокруг оси стойки 43 с платформой 39 (см. фиг.2) моста 34 из состава первой 9 и второй 11 механической части системы управления перемещением, представляют собой комплектные электроприводы, которые включают электродвигатель, механическую передачу и автономную систему управления.
В качестве первого 4 и второго 7 датчиков положения, предназначенных для обеспечения обратной связи по положению скафандров с обучаемым 17 и 19 для первой 5 и второй 8 систем управления перемещением, использованы резольверы (совместно с измерительными преобразователями на базе микросхем типа AD2S90 и AD2S99).
Первая 5 и вторая 8 системы управления перемещением, предназначенные для обеспечения вертикального перемещения обучаемого, состоят из задатчика веса груза, индикатора нуля, индикатора отказа датчика усилия, задатчика момента электродвигателя, сумматора, устройства регулирования момента, блока выделения разности усилий, регулятора усилия, кнопки запуска коррекции, первого блока коррекции, ключа и второго блока коррекции, то есть, по составу большинства компонентов, абсолютно идентичны техническому решению-прототипу (Система управления вертикальным перемещением обучаемого на тренажере выхода в космос по Патенту №2355039), с тем лишь отличием, что: первый скафандр с обучаемым 17 (является, в конечном итоге, основным объектом управления для данной системы), первые датчики положения 4, усилия 13 и скорости 17 (обеспечивают функционирование обратных связей данной системы), первый электродвигатель 10 (является исполнительным устройством для данной системы) и первая механическая часть системы управления перемещением 9, также называемая в Патенте №2355039 «передаточным устройством» (см. позицию 10 фиг.1 Патента №2355039), для большей наглядности представления на функционально-структурном уровне предлагаемого технического решения выделены в качестве отдельных функционально законченных компонентов.
В качестве первого 10 и второго 12 электродвигателей, предназначенных для привода редуктора 44, использованы высокомоментные электродвигатели постоянного тока.
В качестве первого 13 и второго 15 датчиков усилия, предназначенных для обеспечения обратной связи по значению усилия обезвешивания при вертикальных перемещениях скафандров с обучаемыми 17 и 19 для первой 5 и второй 8 систем управления перемещением, использованы тензодатчики типа С2-500 (Тензо-М).
В качестве первого 14 и второго 16 датчиков скорости, предназначенных для обеспечения обратной связи по скорости вертикальных перемещений скафандров с обучаемыми 17 и 19 для первой 5 и второй 8 систем управления перемещением, использованы цифровые датчики скорости - энкодеры.
В качестве первого 17 и второго 19 скафандров, предназначенных для размещения обучаемых, используются выходные космические скафандры, то есть скафандры, предназначенные для выхода космонавтов в открытый космос (штатные для Российского сегмента Международной космической станции) семейства «Орлан» (см. Материал из Википедии - свободной энциклопедии: Орлан (скафандр), http://ru.wikipedia.org/wiki/ Орлан_(скафандр)). В тренажере использована специальная модификация скафандра в тренажном исполнении типа «Орлан-MKT». В скафандре имеются комплекты средств связи, оборудования обеспечения жизнедеятельности, медицинской аппаратуры и телекамера, установленная на шлеме скафандра, которые через жгут из трубопроводов и электрических кабелей 30 (см. фиг.2) подключаются соответственно к средствам связи 18, обеспечения жизнедеятельности 20, психофизиологического контроля 21 и телевизионного наблюдения в пульте контроля и управления 1 тренажера.
Средства связи 18, предназначенные для обеспечения связи между обучаемым в скафандре 17, 19 и инструкторами за пультом контроля и управления 1 (имитация связи «Борт-Земля»), между первым 17 и вторым 19 обучаемым в скафандре, ремонтно-технологической связи между персоналом, обслуживающим технические средства тренажера, реализованы на базе устройств проводной телефонной связи.
Средства обеспечения жизнедеятельности обучаемых в скафандре 20 предназначены для подачи воздуха обучаемым и электропитания оборудования скафандров с обучаемыми 17 и 19.
В качестве средств психофизиологического контроля 21, предназначенных для обеспечения оперативного контроля психофизиологического состояния обучаемых, находящихся в скафандрах 17 и 19, и передачи информации в пульт врача 27, используется устройства преобразования, гальванической развязки и передачи медицинской информации.
Устройства сопряжения с объектом 22, предназначенные для обеспечения информационного обмена (ввода-вывода аналоговой и дискретной информации) между комплектом оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23 и персональными компьютерами, установленными в пульте контроля и управления тренировкой 1, реализованы на базе крейта магистрально-модульной системы в стандарте VME. Связь контроллера крейта устройств сопряжения с объектом 22 с персональными компьютерами, установленными в пульте контроля и управления тренировкой 1, осуществляется по сети «Ethernet».
Комплект оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, предназначенный для подготовки обучаемых внутри орбитального отсека перед выходом в открытый космос, включает оборудование системы шлюзования и фрагменты интерьера внутреннего объема переходного и стыковочного отсеков орбитального модуля МКС, а также оборудование выходного люка стыковочного отсека.
Комплект телекамер наблюдения 24, предназначенный для дистанционного визуального наблюдения за отработкой процедур и упражнений по внекорабельной деятельности обучаемых, состоит из четырех камер высокого разрешения, две из которых являются управляемыми, то есть позволяют изменять направление линии визирования, масштабировать изображение и т.д.
Средства моделирования светотеневой обстановки 25, предназначенные для моделирования светотеневой обстановки при работе обучаемых на фрагменте макета орбитального модуля 26, реализованы на базе четырех прожекторов высокой яркости и устройств их включения.
Фрагмент макета орбитального модуля 26, предназначенный для получения обучаемыми сенсорно-моторных навыков при работе в открытом космическом пространстве на орбите Земли, включает оборудование, навесные механизмы и приборы, поручни и средства фиксации на внешней поверхности орбитального модуля.
Пульт врача 27, обеспечивающий размещение врача тренажера за эргономичным автоматизированным рабочим местом, реализован на базе персонального компьютера. Информационный обмен между персональным компьютером, установленным в пульте врача 27, и персональными компьютерами, установленными в пульте контроля и управления тренировкой 1, осуществляется по сети «Ethernet».
Предлагаемый тренажер работает следующим образом.
Перед началом подготовки на тренажере обучаемые космонавты экипажей МКС проходят соответствующее теоретическое обучение, а затем, на «Стенде подготовки экипажей международной космической станции с использованием элементов виртуальной реальности» (см. Web-страницу ФГБУ «НИИ ЦПК им. Ю. А. Гагарина»: http://www.gctc.ru/main.php?id=l35) - необходимую предтренажерную подготовку. После этого, обучаемые космонавты приходят в помещение тренажера, в котором скомпоновано рабочее место обучаемых 2 (см. фото 1), и, при необходимости, детально знакомятся: с устройством и конструкцией оборудования системы шлюзования, фрагментов интерьера внутреннего объема переходного и стыковочного отсеков, выходного люка (из состава комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23); с конструкцией оборудования, навесных механизмов и приборов, поручней и средств фиксации на внешней поверхности фрагмента макета орбитального модуля 26; уточняют особенности Российского выходного скафандра типа «Орлан», проверяют готовность скафандра к использованию.
После подачи электропитания инженер тренажера совместно с обслуживающим персоналом производит включение и проверку работоспособности оборудования (конкретный состав используемого оборудования тренажера, определяется в соответствие с планом тренировки): пульт контроля и управления 1, первый 3 и второй 6 узел поворота, первая 5 и вторая 8 система управления перемещением, средства связи 18, средства обеспечения жизнедеятельности обучаемых в скафандре 20, средства психофизиологического контроля 21, устройства сопряжения с объектом 22, комплект оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, комплект телекамер наблюдения 24, средства моделирования светотеневой обстановки 25 и пульт врача 27. При поступлении электропитания на первую 5 и вторую 8 системы управления перемещением системы устанавливаются в режим ручного управления, причем первый 17 и второй 19 скафандры опираются на пол помещения и обучаемые космонавты могут осуществить процесс одевания (или, точнее, «входа») в выходной космический скафандр (см. фото 2).
Ввод начальных условий и запуск тренировки.
Инструктор, выбирая предусмотренный планом подготовки сценарий и соответствующие начальные условия тренировки (исходные положения первого 17 и второго 19 скафандров с обучаемыми, состав задействуемого оборудования из комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, параметры светотеневой обстановки и т.д.), запускает тренировку.
Для отработки исходного положения по вертикали инструктор с помощью задатчиков момента электродвигателя (входящих в состав первой 5 и второй 8 системы управления перемещением) выводит первый 17 и второй 19 скафандры с обучаемыми в исходную (например, среднюю) точку диапазона перемещения по вертикали. После установки первого 17 и второго 19 скафандров с обучаемыми в заданной точке диапазона перемещения по вертикали первый 10 и второй 12 электродвигатели останавливаются с помощью задатчиков момента электродвигателя в таком положении, когда создаваемое ими усилия полностью компенсирует не только вес первого 17 и второго 19 скафандров с обучаемыми, но вес и силу сопротивления элементов первой 9 и второй 11 механической части системы управления перемещением, объединяющей первый 10 и второй 12 электродвигатели с первым 17 и вторым 19 скафандрами с обучаемыми, таким образом, подготовив первую 5 и вторую 8 системы управления перемещением к работе в режиме автоматического управления. Для отработки исходного положения (в том числе взаимного позиционирования первого 17 и второго 19 скафандра с обучаемыми) в горизонтальной плоскости инструктор с помощью органов управления автономной системы управления (входящих в состав первого 3 и второго 6 узлов поворота) осуществляет поворот моста 34 (см. фиг.2) первой 9 и второй 11 механической части системы перемещения, на требуемые углы, а далее, вручную воздействуя (с достаточно малыми усилиями) на первый 17 и второй 19 скафандры с обучаемыми, перемещают каретку 32 по воздушной пленке между четырех опор 33 и мостом 34 (см. фиг.2) первой 9 и второй 11 механической части системы перемещения в требуемые положение относительно комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23 или фрагмента макета орбитального модуля 26.
После этого инструктор может занять свое место за пультом контроля и управления 1, а обучаемые могут приступить к тренировке, например выполнить операции по шлюзованию, открыть выходной люк и т.д. При необходимости перемещения в так называемом «безопорном пространстве» тренажера, например, первый обучаемый отталкивается руками от элементов конструкции комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23 (или, захватив элементы конструкции, притягивает их к себе руками). Создаваемое обучаемым усилие, в общем случае, состоит из трех составляющих векторов (усилие в вертикальной плоскости и два взаимно перпендикулярных усилия в горизонтальной плоскости). Усилия, действующие в вертикальной плоскости, вызывают пропорциональное их величине изменение значения датчика усилия 13, которое отрабатывается первой системой управления перемещением 5, приводя к соответствующему (в зависимости от величины и продолжительности усилия, прилагаемого обучаемым, а также инерционности электродвигателя 10 и сил трения в элементах первой механической части системы управления перемещением 9) перемещению скафандра с обучаемым 1 в направлении, противоположном направлению прилагаемого усилия. Таким образом, в вертикальной плоскости осуществляется активное силокомпенсирующее обезвешивание с помощью управляемого электропривода. Усилия, которые действуют в горизонтальной плоскости, также приводят к соответствующему (в зависимости от величины и продолжительности усилия, прилагаемого обучаемым, а также инерционности и сил трения в элементах первой механической части системы управления перемещением 9) перемещению скафандра с обучаемым 1 в направлении, противоположном направлению прилагаемого усилия. В связи с небольшой массой каретки 30, незначительным значением силы трения в элементах подвеса скафандра (направляющие блоки 35 и 40, трос канатной передачи 41) и практически отсутствующей (из-за наличия воздушной пленки) силе трения между опорами 33 каретки 30 и несущей поверхностью моста 34 для перемещения вдоль моста 34 обучаемому достаточно прилагать относительно небольшие усилия. Несмотря также на отсутствие (практически полностью) сил трения между опорами 37 моста 30 и платформами 39 стойки 42 и 43, из-за значительной массы моста 34 усилия, которые вынужден прилагать обучаемый для перемещения (поворота) моста 34, более ощутимы как по значению, так и по длительности. Таким образом, в горизонтальной плоскости осуществляется пассивное силокомпенсирующее обезвешивание.
Однако в тренажере, при необходимости перемещения в горизонтальной плоскости путем поворота моста 34 на большой угол, у инструктора всегда имеется возможность с помощью узла поворота 31 «подыграть» обучаемому и несколько уменьшить длительность усилий, прилагаемых им для этого перемещения.
При отработке задач по подготовке к выходу в открытый космос функционирование оборудования системы шлюзования, оборудования выходного люка и т.д. из состава комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23 обеспечивается устройствами сопряжения с объектом 22, причем инструктор с помощью персонального компьютера, установленного в пульте контроля и управления тренировкой 1 по сети «Ethernet», получает всю необходимую информацию от контроллера крейта устройств сопряжения с объектом 22.
При отработке задач внекорабельной деятельности обучаемый с помощью поручней перемещается (при этом система силокомпенсирующего обезвешивания тренажера функционирует аналогично описанному выше) по внешней поверхности фрагмента макета орбитального модуля 26, фиксируется страховочным фалом скафандра в нужной для выполнения работы зоне макета и выполняет необходимые операции с оборудованием, навесными механизмами и приборами, установленными в рабочей зоне на внешней поверхности макета. Причем для воссоздания яркого солнечного освещения фрагмента макета орбитального модуля 26, требующего от обучаемого использования светофильтра на шлеме скафандра (см. фото 3), инструктор имеет возможность включения четырех прожекторов (в требуемой комбинации) из состава средств моделирования светотеневой обстановки 25 и регулирования их яркости с помощью панели управления на пульте контроля и управления тренировкой 1.
В процессе тренировки средства обеспечения жизнедеятельности обучаемых в скафандре 20 осуществляют очистку и подачу воздуха для дыхания обучаемых и электропитания для устройств оборудования скафандров с обучаемыми 17 и 19. Контроль наиболее важных параметров жизнеобеспечения обучаемых осуществляется инструктором с помощью устройств отображения информации, установленных в пульте контроля и управления тренировкой 1.
Обучаемые по средствам связи 18 имеют возможность вести речевой обмен между собой, с инструкторами, которые в процессе тренировки выполняют роль как специалистов Центра управления полетами, так и других членов экипажа МКС, находящихся внутри орбитальных модулей.
В процессе тренировки с помощью датчиков, закрепленных на теле обучаемого, и медицинской аппаратуры скафандра снимаются сигналы электрокардиограммы, пневмограммы и значения температуры тела, которые через средства психофизиологического контроля 21 поступают на пульт врача 27, позволяя врачу тренажера осуществлять в реальном масштабе времени достоверный контроль психофизиологического состояния обучаемых.
За отработкой процедур подготовки выхода в открытый космос и упражнений по внекорабельной деятельности обучаемых в процессе тренировки инструкторами осуществляется дистанционное визуальной наблюдение с помощью четырех телекамер из комплекта телекамер наблюдения 24. Кроме того, телекамера, установленная на шлеме скафандра, предоставляет инструкторам дополнительную возможность наблюдения за действиями обучаемого непосредственно в его рабочей зоне, что позволяет значительно более объективно оценивать результаты выполнения операций и упражнений.
Ввод отказов.
В процессе тренировки с пульта контроля и управления тренировкой 1 для инструктора предусмотрена возможность ввода следующих основных отказов на выбор или в требуемой комбинации:
- отказ отдельных органов управления (клавиши, тумблеры и т.д.) и отдельных средств отображения информации (индикаторы, сигнальные табло, транспаранты и т.д.) оборудования системы шлюзования из комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23;
- отказ отдельных органов управления (клавиши, тумблеры и т.д.) и отдельных средств отображения информации (индикаторы, сигнальные табло, транспаранты и т.д.) оборудования выходного люка стыковочного отсека из комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23.
Для имитации отказов органов управления и средств отображения информации, в зависимости от выполняемого сценария тренировки, инструктор производит по сети «Ethernet» с помощью персонального компьютера, установленного в пульте контроля и управления тренировкой 1, «блокирование» необходимых каналов ввода-вывода аналоговых и дискретных сигналов в контроллере крейта устройств сопряжения с объектом 22.
Кроме того, под контролем врача тренажера предусмотрена возможность ввода с помощью средств обеспечения жизнедеятельности обучаемых в скафандре 20 отдельных отказов в устройствах оборудования скафандров с обучаемыми 17 и 19, например останов насоса системы жидкостного терморегулирования микроклимата внутри скафандра.
Останов и завершение тренировки.
Инструктор, выполнив требуемый сценарий тренировки, производит останов и выдает команду на завершение тренировки.
К техническим результатам, полученным в предлагаемом изобретении, относятся следующие функциональные возможности тренажера:
- изучение устройства, конструкции и компоновки штатных выходных скафандров Российского сегмента МКС для внекорабельной деятельности типа «Орлан», подготовка скафандра к использованию, основ его технического обслуживания и текущего ремонта, работа в скафандре, управление его системами в штатных режимах и в нештатных ситуациях;
- изучение устройства, конструкции и компоновки оборудования средств шлюзования, оборудования выходного люка и т.д.;
- изучение устройства, конструкции и компоновки оборудования, навесных механизмов и приборов, поручней и средств фиксации на внешней поверхности фрагмента макета орбитального модуля;
- подготовка на тренажере одного или двух обучаемых, в том числе (что особенно актуально для работы в открытом космосе) при выполнении совместных операций и процедур внекорабельной деятельности в открытом космическом пространстве одновременно двумя обучаемыми космонавтами;
- обеспечение жизнедеятельности обучаемого в штатном скафандре длительное время, достаточное для решения тренировочных задач любого уровня сложности;
- «погружение» обучаемого в безопорное пространство с тремя степеням свободы в условиях имитируемой «полной» невесомости наземного тренажера;
- активное силокомпенсирующее обезвешивание обучаемых в скафандрах при вертикальных перемещениях и пассивное - при перемещениях в горизонтальной плоскости;
- обеспечение возможности приобретения обучаемыми космонавтами устойчивых сенсорно-моторных навыков по управлению комплексом средств шлюзования при выполнении операций в переходном и стыковочном отсеках орбитального модуля Российского сегмента МКС в соответствии с требуемыми циклограммами работ;
- перемещение обучаемых в скафандрах и закрепление в рабочей зоне на поверхности орбитального модуля МКС;
- обеспечение возможности приобретения обучаемыми устойчивых сенсорно-моторных навыков при работе с оборудованием, навесными механизмами и приборами, установленными на внешней поверхности орбитального модуля;
- моделирование светотеневой обстановки, характерной для космических объектов, которые находятся на орбите Земли;
- обеспечение возможности ведения речевых переговоров между обучаемыми в скафандрах, имитация связи обучаемых с остальными членами экипажа МКС и со специалистами Центра управления полетами;
- обеспечение возможности всестороннего контроля и эффективно управления ходом тренировки с помощью пульта контроля и управления, дополненное возможностью дистанционного визуального наблюдения за деятельностью обоих обучаемых, а также за конкретными действиями каждого обучаемого непосредственно в его рабочей зоне;
- обеспечение достоверного психофизиологического контроля в реальном масштабе времени за обучаемыми профессиональным специалистом-врачом.
Промышленная применимость изобретения определяется тем, что предлагаемый тренажер может быть изготовлен на базе известных комплектующих изделий и технологического оборудования.
Предлагаемое техническое решение в полном объеме практически реализовано в специализированном тренажере «Выход-2» (см. Web-страницу ФГБУ «НИИ ЦПК им. Ю. А. Гагарина»: http://www.gctc.ru/main.php?id= 145) (поставка по документу ЩТ.301.017) в ФГБУ «НИИ ЦПК им. Ю. А. Гагарина» (Звездный городок, Московская обл.), а также частично в программно-техническом комплексе (поставка по документу ЦТКФ. 161454.081), предназначенном для модернизации динамического стенда «Селен» (см. Web-страницу журнала «Новости космонавтики»: Лунный стенд для марсиан, http://www.novosti-kosmonavtiki.ru/content/numbers/249/05.shtml) в ОАО «РКК «Энергия» им. СП. Королева».
Таким образом, предлагаемый тренажер является высокотехнологичной разработкой и обладает весьма широкими функциональными возможностями, обеспечивая на стендово-тренажерной базе ФГБУ «НИИ ЦПК им. Ю. А. Гагарина» поэтапный процесс всесторонней высокопрофессиональной подготовки экипажей МКС к выходу в космос из стыковочного отсека - модуля СО-1 «Пирс» и к эффективной работе в открытом космическом пространстве на орбите Земли.
На основании вышеизложенного и по результатам проведенного патентно-информационного поиска считаем, что предлагаемый тренажер отвечает критериям «Новизна», «Изобретательский уровень» и «Промышленная применимость» и может быть защищен патентом РФ на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| ИНТЕГРИРОВАННЫЙ УЧЕБНО-ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ РОССИЙСКИХ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2559872C1 |
| УЧЕБНЫЙ ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ К ВНУТРИКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ | 2020 |
|
RU2738489C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| ТРЕНАЖЁРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМИЧЕСКИХ КОРАБЛЕЙ К ДЕЙСТВИЯМ ПОСЛЕ ПОСАДКИ ПИЛОТИРУЕМОЙ КАПСУЛЫ НА МОРЕ С ВОЛНЕНИЕМ | 2020 |
|
RU2734659C1 |
| КОСМОЦЕНТР | 2012 |
|
RU2505864C2 |
| УЧЕБНЫЙ ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМОНАВТОВ К ПРОВЕДЕНИЮ НАУЧНЫХ ИССЛЕДОВАНИЙ НА БОРТУ МКС | 2015 |
|
RU2617433C2 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |

Изобретение относится к космическому тренажеростроению. Тренажер включает пульт контроля и управления 1, рабочее место обучаемых 2, первый узел поворота 3, первый датчик положения 4, первую систему управления перемещением 5, второй узел поворота 6, второй датчик положения 7, вторую систему управления перемещением 8, первую механическую часть системы управления перемещением 9, первый электродвигатель 10, вторую механическую часть системы управления перемещением 11, второй электродвигатель 12, первый датчик усилия 13, первый датчик скорости 14, второй датчик усилия 15, второй датчик скорости 16, первый скафандр с обучаемым 17, средства связи 18, второй скафандр с обучаемым 19. Кроме того, тренажер включает средства обеспечения жизнедеятельности обучаемых в скафандре 20, средства психофизиологического контроля 21, устройства сопряжения с объектом 22, комплект оборудования шлюзования переходного и стыковочного отсеков орбитального модуля 23, комплект телекамер наблюдения 24, средства моделирования светотеневой обстановки 25, фрагмент макета орбитального модуля 26 и пульт врача 27. В результате обеспечивается профессиональная подготовка обучаемых, которыми приобретаются устойчивые сенсорно-моторные навыки при подготовке внутри орбитального отсека МКС к выходу в открытый космос, а также при выполнении совместных операций и процедур внекорабельной деятельности в открытом космическом пространстве. 1 з.п. ф-лы, 2 ил., 3 фото.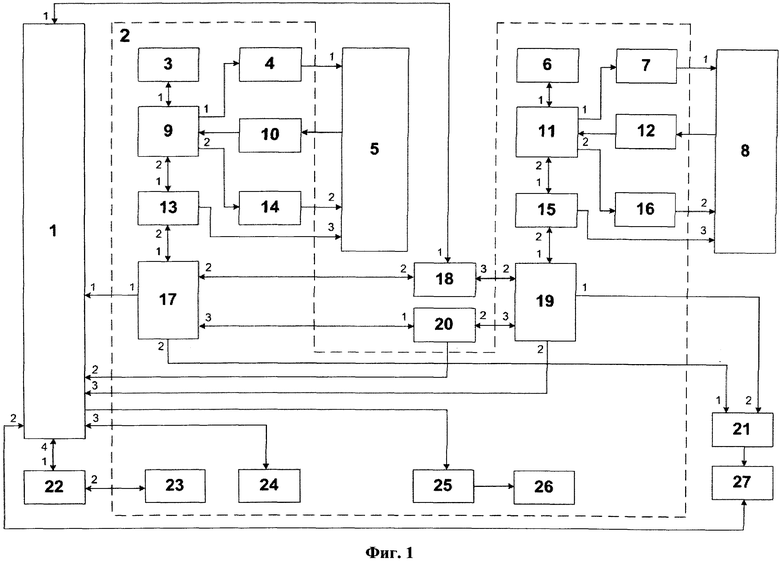
1. Тренажер внекорабельной деятельности космонавтов, содержащий первый узел поворота, первый датчик положения, первую систему управления перемещением, первую механическую часть системы управления перемещением, первый электродвигатель, первый датчик усилия, первый датчик скорости и первый скафандр с обучаемым, причем вход-выход первого узла поворота через последовательно соединенные первую механическую часть системы управления перемещением и первый датчик усилия подключен к первому входу-выходу первого скафандра с обучаемым; к первому входу первой системы управления перемещением через первый датчик положения подключен первый выход первой механической части системы управления перемещением, ко второму входу через первый датчик скорости - второй выход первой механической части системы управления перемещением, к третьему входу - выход первого датчика усилия; выход первой системы управления перемещением через первый электродвигатель подключен к входу первой механической части системы управления перемещением,
отличающийся тем, что в него введены пульт контроля и управления, вторая система управления перемещением, средства связи, средства обеспечения жизнедеятельности обучаемых в скафандре, средства психофизиологического контроля, устройства сопряжения с объектом, пульт врача и рабочее место обучаемых, состоящее из второго узла поворота, второго датчика положения, второй механической части системы управления перемещением, второго электродвигателя, второго датчика усилия, второго датчика скорости, второго скафандра с обучаемым, комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля, комплекта телекамер наблюдения, средства моделирования светотеневой обстановки, фрагмента макета орбитального модуля; причем вход-выход второго узла поворота через последовательно соединенные вторую механическую часть системы управления перемещением и второй датчик усилия подключен к первому входу-выходу второго скафандра с обучаемым, а к первому входу второй системы управления перемещением через второй датчик положения подключен первый выход второй механической части системы управления перемещением, ко второму входу через второй датчик скорости - второй выход второй механической части системы управления перемещением, к третьему входу - выход второго датчика усилия; выход второй системы управления перемещением через второй электродвигатель подключен к входу второй механической части системы управления перемещением; к первому входу-выходу пульта контроля и управления подключен первый вход-выход средств связи, ко второму входу-выходу - вход-выход пульта врача, к третьему входу-выходу - вход-выход комплекта телекамер наблюдения, к четвертому входу-выходу - первый вход-выход устройств сопряжения с объектом, к первому входу - первый выход первого скафандра с обучаемым, ко второму входу - выход средств обеспечения жизнедеятельности обучаемых в скафандре к третьему входу - второй выход второго скафандра с обучаемым; ко второму входу-выходу средств связи подключен второй вход-выход первого скафандра с обучаемым, к третьему входу-выходу - второй вход-выход второго скафандра с обучаемым; к первому входу-выходу средств обеспечения жизнедеятельности обучаемых в скафандре подключен третий вход-выход первого скафандра с обучаемым, ко второму входу-выходу - третий вход-выход второго скафандра с обучаемым; второй вход-выход устройств сопряжения с объектом подключен к входу-выходу комплекта оборудования шлюзования переходного и стыковочного отсеков орбитального модуля;
выход пульта контроля и управления через средства моделирования светотеневой обстановки подключен к входу фрагмента макета орбитального модуля;
к первому входу средств психофизиологического контроля подключен второй выход первого скафандра с обучаемым, ко второму входу - первый выход второго скафандра с обучаемым, а выход средств психофизиологического контроля подключен к входу пульта врача.
2. Тренажер по п.1, отличающийся тем, что первый узел поворота, первый датчик положения, первая механическая часть системы управления перемещением, первый электродвигатель, первый датчик усилия, первый датчик скорости, первый скафандр с обучаемым включены в состав рабочего места обучаемых.
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС | 2007 |
|
RU2355039C1 |
| ГИДРОПНЕВМАТИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ | 1987 |
|
SU1489114A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ жидкостной обработки кож и аппарат для его осуществления | 1954 |
|
SU102823A2 |

