ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в целом, относится к способу и системе для обнаружения экранирования маркера электронной системы наблюдения за перемещением предметов ("EAS"), а более конкретно - к способу и системе для обнаружения экранирования маркера EAS, используя комбинацию обнаружения металла, радиочастотной идентификации ("RFID") и видеодатчиков для того, чтобы идентифицировать обнаруженные металлические предметы и предотвратить ложные сигналы тревоги.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Все больше распространяется способ нейтрализации систем ("EAS") электронного наблюдения за перемещением предметов, представляющий собой использование легкодоступной металлической фольги, такой как алюминиевая фольга, для того чтобы экранировать маркеры EAS от обнаружения их системой EAS. Воры часто выкладывают внутреннюю поверхность сумок для покупок, ручных сумочек и рюкзаков металлической фольгой для того, чтобы обеспечить скрытый отсек для помещения вещей, которые намереваются украсть при посещении магазина таким образом, чтобы можно было выйти через зону выхода, оборудованную системой EAS, без обнаружения вещей. В ответ на данную проблему розничные продавцы все чаще используют системы обнаружения метала, настроенные на обнаружение металлической фольги таким образом, чтобы можно было получить предупреждение о проносе через выход сумки или рюкзака, выложенных фольгой.
Главная проблема при таком подходе состоит в том, что существует много металлических объектов и продуктов, проносимых через зону обнаружения системы EAS, которые не связаны с воровством. Некоторыми примерами таких предметов могут служить тележки для покупок, инвалидные кресла-каталки, товары, содержащие металл или упакованные в алюминиевую фольгу, и пакеты из фольги, используемые для сохранения готовых продуктов питания горячими, и т.д. Эффективность системы обнаружения металла зависит от сокращения количества сигналов тревоги от предметов, не связанных с воровством, которые проносятся через зону обнаружения, и от увеличения количества обнаружений сумок и рюкзаков, специально выложенных фольгой.
Металлоискатели обычно формируются при помощи пары передатчика и приемника. Передатчик передает сигнал, а приемник принимает сигнал передатчика, который ослаблен и/или сдвинут по фазе, при нахождении металла в зоне опроса. Традиционно данные системы определяют различие между сумками, выложенными фольгой, и другими металлическими объектами только посредством предупреждения при обнаружении металлов, что имеются ответные сигналы, амплитуда которых находится в диапазоне, характерном для сумок, выложенных фольгой, а не другими объектами. К сожалению, надежность способа, основанного на амплитуде, невысокая, поскольку сумка, выложенная фольгой и находящаяся вблизи антенны металлоискателя, может показать мощность отраженного сигнала, аналогичную той, которую дает тележка для покупок, расположенная еще дальше от металлоискателя. Данная проблема ограничивает применение систем обнаружения металла узкими проходами и ограничивает диапазон для положительного обнаружения сумок, выложенных фольгой, что приводит к ухудшению чувствительности системы.
В качестве другого возможного решения продавцы розничных товаров иногда размещают системы обнаружения металла таким образом, чтобы тележки для товаров не проходили. Иными словами, металлоискатели и/или системы EAS располагают таким образом, чтобы эти тележки для покупок не проходили через выходы. Однако управление потоком движения посетителей, для устранения ложных сигналов тревоги от тележек для покупок, мешает нормальному поведению посетителей и ухудшает впечатление покупателей. Поскольку положительное впечатление посетителя является чрезвычайно важным для продавцов розничных товаров, то данный подход обычно нежелателен.
Продавцы розничных товаров могут также исключить продукты, которые вызывают ложные сигналы тревоги, такие как продукты в металлической или металлизированной упаковке, либо выложенные фольгой пакеты, предназначенные для того, чтобы сохранять готовые блюда горячими, и т.д. Исключение продуктов, вызывающих ложные сигналы тревоги, также приводит к снижению уровня обслуживания и ограничению выборов покупателя, что является критически важным для продавцов розничных товаров. Таким образом, для продавцов розничных товаров данный подход также является нежелательным.
Поэтому необходимы система и способ, которые могли бы идентифицировать предметы, используемые, вероятно, в качестве контейнеров, выложенных фольгой, для подтверждения сигналов металлоискателей, а также для автоматической идентификации предметов, вносимых в зону обнаружения, которые могут вызвать ложные сигналы тревоги, и предотвращать такие сигналы ложной тревоги.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение преимущественно предоставляет способ и систему для обнаружения экранирования маркера системы электронного наблюдения за перемещением предметов путем координации входных сигналов от многочисленных подсистем, включающих в себя электронную подсистему наблюдения за перемещением предметов, подсистему обнаружения металла, подсистему анализа видеоизображений и подсистему идентификации посредством радиочастоты. Сопоставление известных условий с предварительно определенными классами объектов позволяет осуществить преимущественно более точное обнаружение экранирования и предотвращает ложные сигналы тревоги.
В соответствии с одним аспектом настоящего изобретения, система для обнаружения экранирования маркера системы электронного наблюдения за перемещением предметов включает в себя электронную подсистему наблюдения за перемещением предметов, подсистему обнаружения металла, подсистему анализа видеоизображений и системный контроллер. Системный контроллер соединен с возможностью связи с электронной подсистемой наблюдения за перемещением предметов, с подсистемой обнаружения металла и с подсистемой анализа видеоизображений. Электронная подсистема наблюдения за перемещением предметов обнаруживает электронные маркеры системы наблюдения за перемещением предметов в пределах зоны обнаружения. Подсистема обнаружения металла включает в себя по меньшей мере одну передающую антенну и обнаруживает металлические объекты в пределах зоны обнаружения. Подсистема анализа видеоизображений захватывает по меньшей мере одно видеоизображение металлического объекта. Системный контроллер определяет первую предполагаемую классификацию для металлического объекта и вычисляет весовой показатель достоверности для первой предполагаемой классификации. Системный контроллер, кроме того, идентифицирует металлический объект как экранирование маркера системы электронного наблюдения за перемещением предметов, согласно первой предполагаемой классификации и соответствующему весовому показателю достоверности, и формирует сигнал тревоги.
В соответствии с другим аспектом настоящего изобретения, система для обнаружения экранирования маркера системы электронного наблюдения за перемещением предметов включает в себя электронную подсистему наблюдения за перемещением предметов, подсистему обнаружения металла, подсистему радиочастотной идентификации и системный контроллер. Системный контроллер соединен с возможностью связи с электронной подсистемой наблюдения за перемещением предметов, с подсистемой обнаружения металла и с подсистемой радиочастотной идентификации. Электронная подсистема наблюдения за перемещением предметов обнаруживает электронные маркеры системы наблюдения за перемещением предметов в пределах зоны обнаружения. Подсистема обнаружения металла обнаруживает металлические объекты в пределах зоны обнаружения. Подсистема радиочастотной идентификации обнаруживает метку радиочастотной идентификации в зоне обнаружения, принимает код метки от метки радиочастотной идентификации и определяет, включен ли код метки в список кодов сигналов предметов ложной тревоги. Если подсистема обнаружения металла обнаруживает металлический объект в пределах зоны обнаружения, а подсистема радиочастотной идентификации определяет, что код метки не включен в список кодов предметов ложной тревоги, то системный контроллер формирует сигнал тревоги. Если подсистема обнаружения металла обнаруживает металлический объект в пределах зоны обнаружения, а подсистема радиочастотной идентификации определяет, что код метки включен в список кодов предметов ложной тревоги, то системный контроллер идентифицирует данный металлический объект в качестве объекта, не являющегося экранированием маркера электронной системы наблюдения за перемещением предметов.
В соответствии с еще одним аспектом настоящего изобретения, представлен способ для обнаружения экранирования маркера электронной системы наблюдения за перемещением предметов. Электронная подсистема наблюдения за перемещением предметов обеспечена для обнаружения, в пределах зоны обнаружения, маркеров электронной системы наблюдения за перемещением предметов. При обнаружении металлического объекта в пределах зоны обнаружения захватывается видеоизображение металлического объекта. Определяется первая предполагаемая классификация для металлического объекта и вычисляется весовой показатель достоверности для первой предполагаемой классификации. Металлический объект идентифицируется как экранирование маркера системы электронного наблюдения за перемещением предметов, согласно первой предполагаемой классификации и соответствующему весовому показателю достоверности, и формируется сигнал тревоги.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Более полное понимание настоящего изобретения и его сопутствующих преимуществ и особенностей будет более ясно разъяснено со ссылками на нижеследующее подробное описание при рассмотрении вместе с прилагаемыми чертежами, где
на фиг.1 показана функциональная схема примера системы обнаружения экранирования маркера системы электронного наблюдения за перемещением предметов ("EAS"), созданная в соответствии с принципами настоящего изобретения;
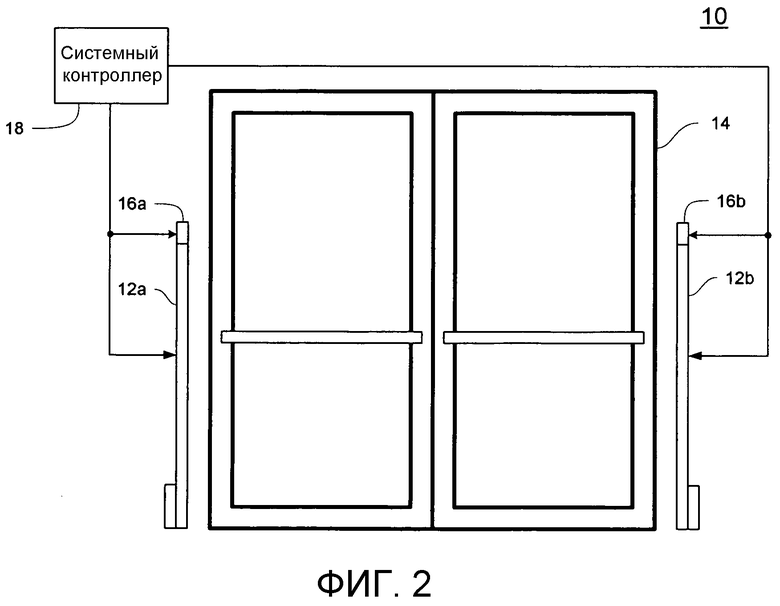
на фиг.2 показана функциональная схема альтернативной конфигурации системы обнаружения экранирования маркера EAS, созданной в соответствии с принципами настоящего изобретения;
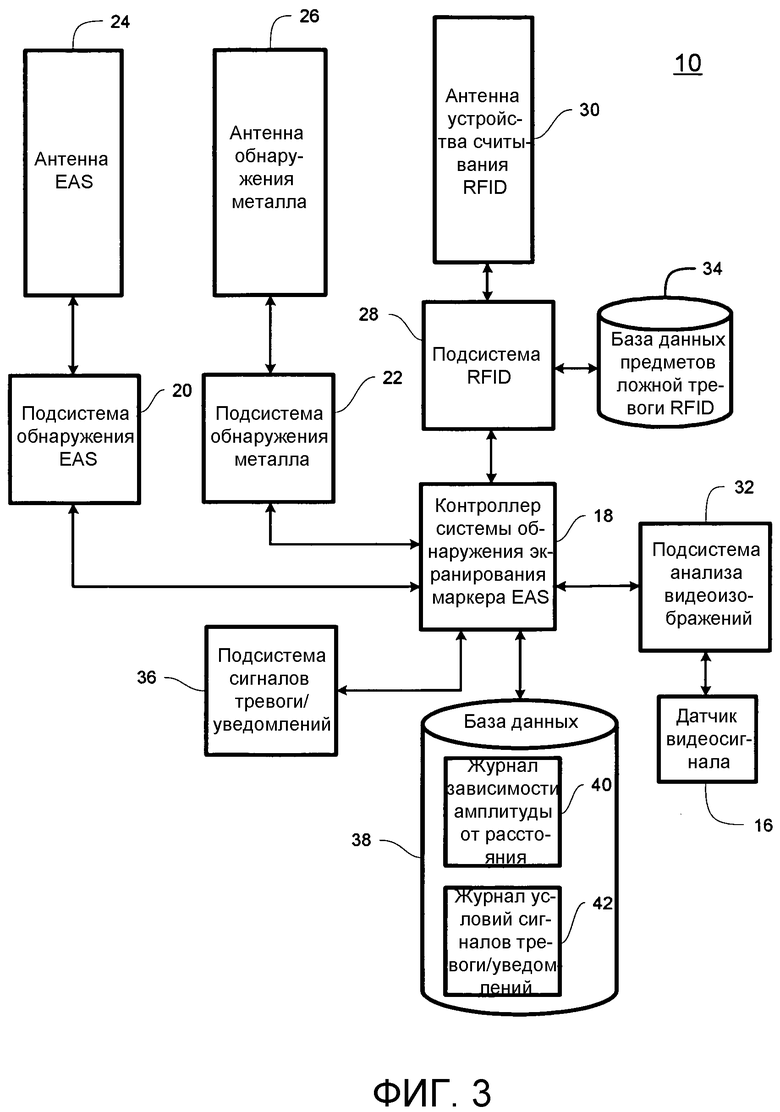
на фиг.3 показана функциональная схема примерной системы управления системами обнаружения экранирования маркера EAS, представленными на фиг.1 и 2, созданная в соответствии с принципами настоящего изобретения;
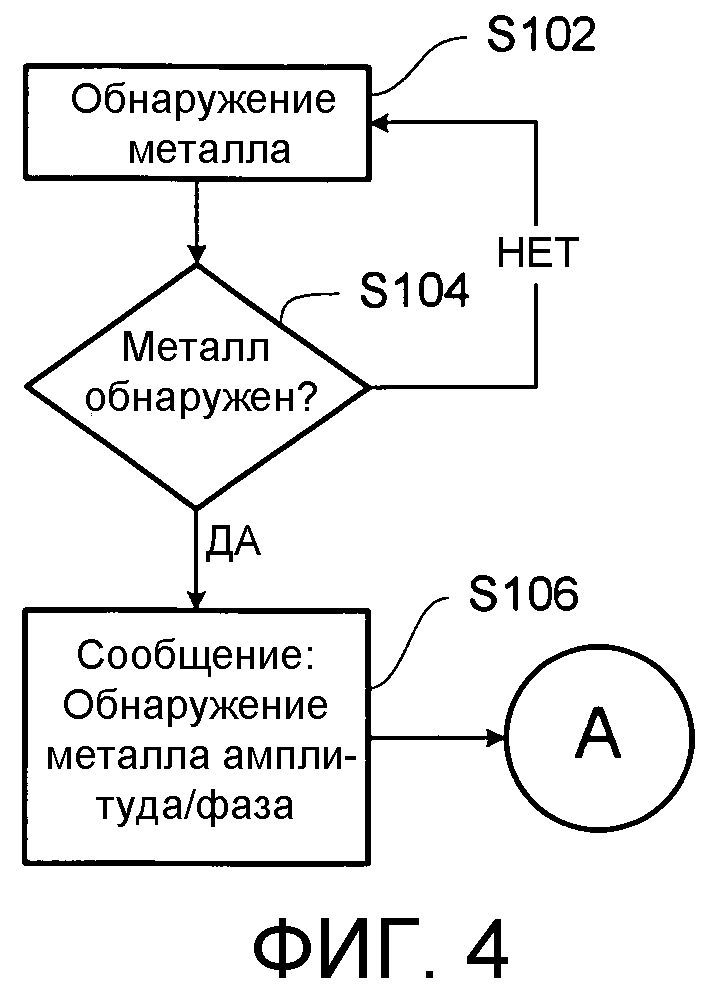
на фиг.4 показана последовательность операций примерного процесса обнаружения металла, осуществляемого подсистемой обнаружения металла системы обнаружения экранирования маркера EAS, в соответствии с принципами настоящего изобретения;
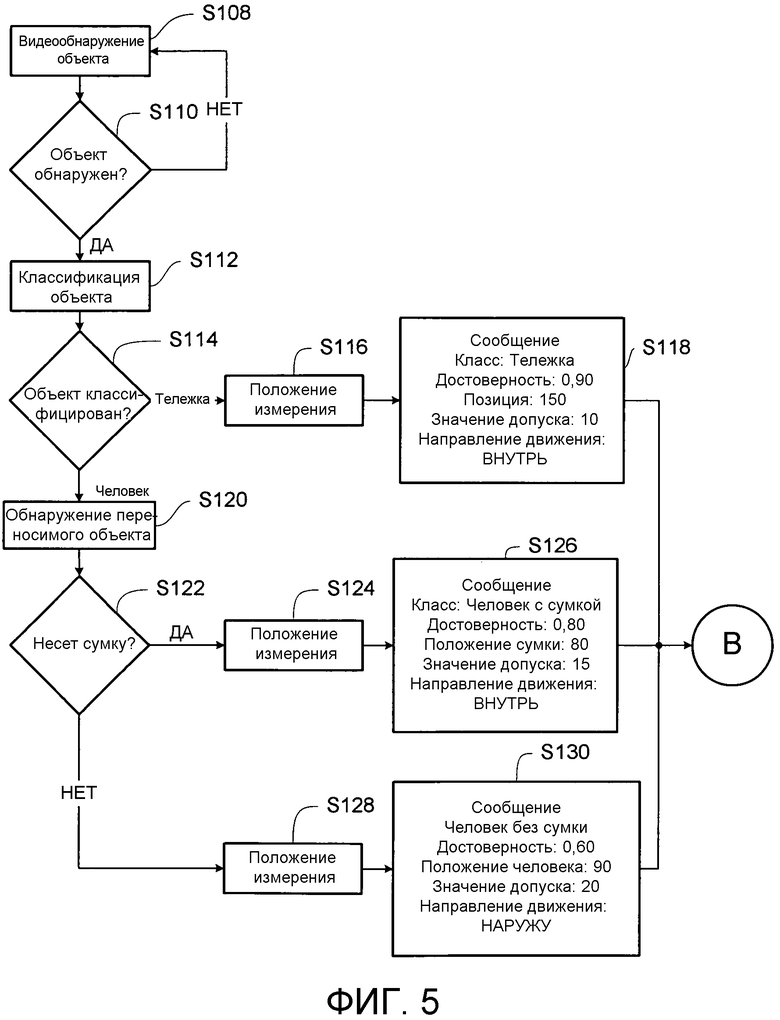
на фиг.5 показана последовательность операций примерного процесса анализа видеоизображения, выполняемого подсистемой видеообнаружения системы обнаружения экранирования маркера EAS, в соответствии с принципами настоящего изобретения;
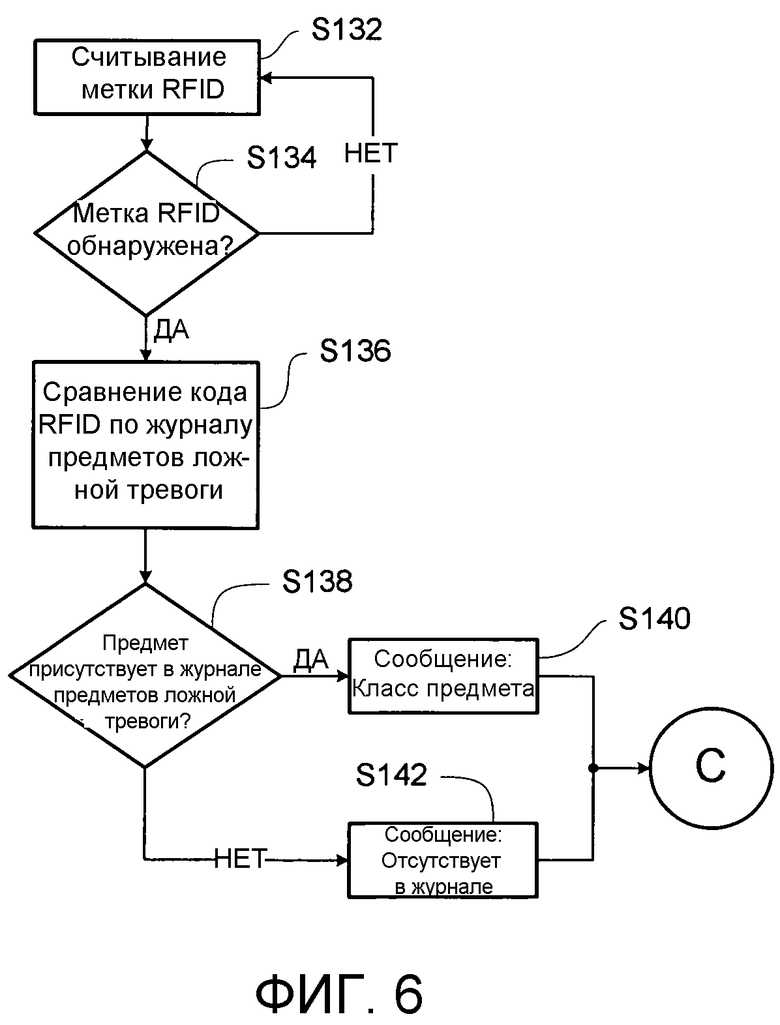
на фиг.6 показана последовательность операций примерного процесса обнаружения посредством радиочастотной идентификации ("RFID"), выполняемого подсистемой обнаружения RFID системы обнаружения экранирования маркера EAS, в соответствии с принципами настоящего изобретения;
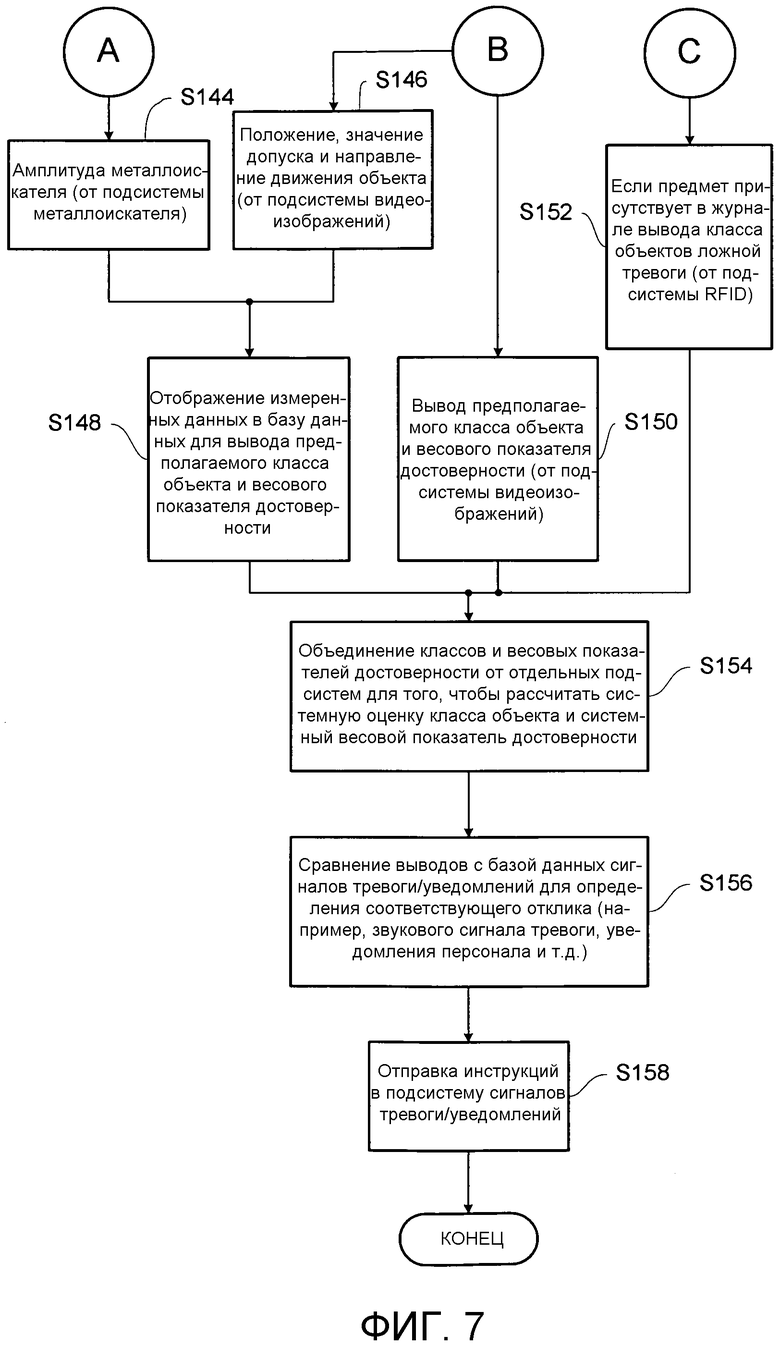
на фиг.7 показана последовательность операций примерного укрупненного (верхнеуровневого) процесса работы, выполняемого системой обнаружения экранирования маркера EAS, в соответствии с принципами настоящего изобретения;
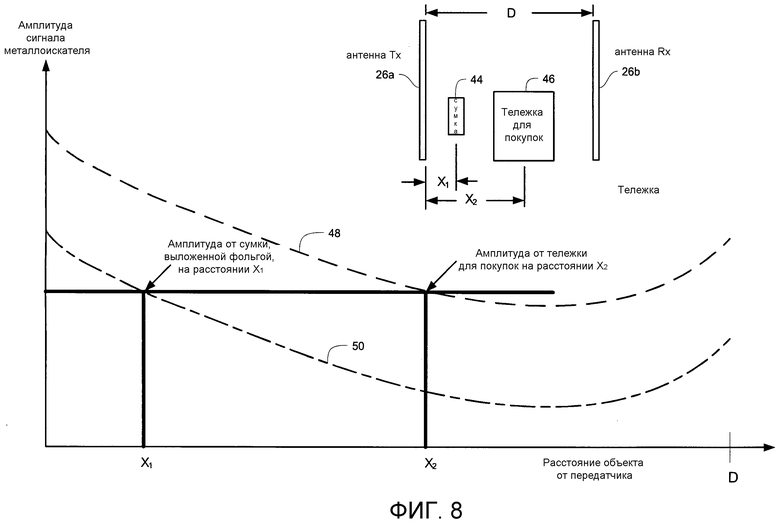
на фиг.8 показан график, иллюстрирующий примерные сравнительные амплитуды сигналов от тележки для покупок и от сумки, выложенной фольгой, в функции расстояния от антенны передатчика металлоискателя; и
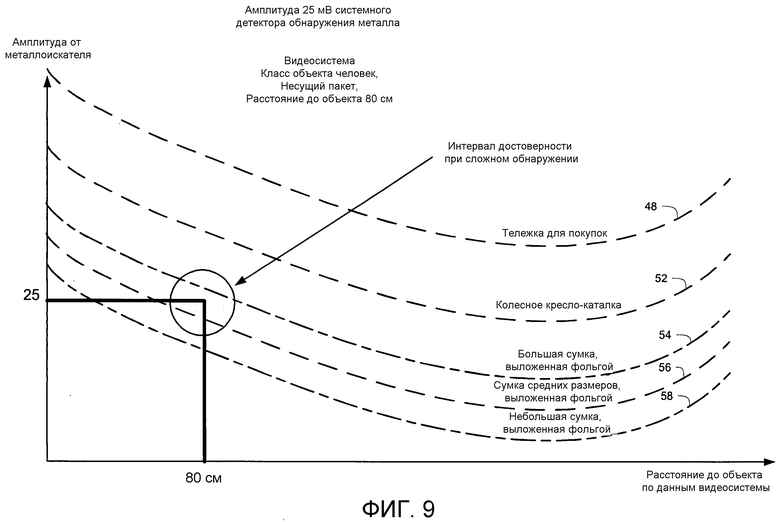
на фиг.9 показан график, иллюстрирующий примерные соотношения между амплитудой выходного сигнала металлоискателя и расстоянием объекта от антенны передатчика металлоискателя для нескольких классов металлических объектов.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Прежде чем подробно описывать примерные варианты осуществлений, соответствующие настоящему изобретению, отметим, что варианты осуществлений существуют преимущественно в комбинациях аппаратных компонентов и этапов обработки, связанных с реализацией системы и способа для того, чтобы идентифицировать предметы, которые, вероятно, должны быть использованы в качестве контейнеров, выложенных фольгой, и идентифицировать предметы, вносимые в зону обнаружения, которые могут запускать ложные сигналы тревоги для того, чтобы проводить различия между условиями реальных и ложных сигналов тревоги. Соответственно, компоненты системы и способа были представлены там, где это возможно, обычными символами на фигурах, при этом показаны только те конкретные детали, которые уместны для понимания вариантов осуществлений настоящего изобретения для того, чтобы не затенять раскрытие деталями, являющимися очевидными для специалистов в данной области техники.
Используемые здесь относительные термины, такие как «первый» и «второй», «верх» и «низ» и т.п., могут быть использованы исключительно для того, чтобы различить один объект или элемент от другого объекта или элемента, без обязательного требования или предположения любых физических или логических отношений или порядка расположения между такими объектами или элементами. Дополнительно, термины «маркер EAS», «метка EAS» и «этикетка EAS» использованы здесь взаимозаменяемо для обозначения устройства, которое может быть обнаружено детектором EAS.
Один вариант осуществления настоящего изобретения преимущественно обеспечивает способ и систему для обнаружения экранирования этикетки EAS путем использования обнаружения металла, RFID и датчиков видеоизображения. Система обнаружения EAS, предназначенная для обнаружения маркеров EAS, прикрепленных к охраняемому предмету, и металлоискатель, который распознает наличие экранирующих металлических материалов, которые могут использоваться для экранирования маркера EAS от обнаружения системой обнаружения EAS, используются в комбинации с одним или несколькими из считывателя RFID, видеодатчиков и системы анализа видеоизображений. Считыватель RFID предназначен для считывания этикетки RFID, прикрепляемой к предметам, о которых известно, что они содержат металл, который может вызвать ложный сигнал тревоги от системы обнаружения металла. Один или несколько видеодатчиков и система анализа видеоизображений определяют различные аспекты окружающей среды вокруг других систем обнаружения, с целью улучшения эффективности обнаружения.
При использовании системы анализа видеоизображений надежность положительного обнаружения предметов возле систем обнаружения, которые могут содержать экранирование маркера EAS, например сумки, рюкзаки и т.д., значительно улучшается. Система анализа видеоизображений может обнаруживать присутствие, местоположение и движение объектов в зоне обнаружения и, кроме того, классифицировать данные объекты для определения их типа, чтобы улучшить обнаружение металла в окружающей среде и идентифицировать иные известные металлические предметы, которые могут вызвать ложные сигналы тревоги, например металлические тележки для покупок, инвалидные кресла-каталки, малые металлические объекты в непосредственной близости к системе обнаружения металла и т.д.
Обратимся теперь к чертежам, на которых одинаковые обозначения соответствуют одинаковым элементам: на фиг.1 показана примерная конфигурация системы 10 обнаружения экранирования маркера системы электронного наблюдения за перемещением предметов ("EAS"), расположенной, например, на входе в помещение. Система 10 обнаружения экранирования маркера EAS включает в себя пару стоек 12a, 12b (собирательно обозначаемые как стойка 12) на противоположных сторонах входа 14. Антенны для каждой из подсистем EAS, RFID и обнаружения металла могут быть объединены в стойках 12a и 12b, которые расположены на известном расстоянии друг от друга. Видеодатчики 16 (показан один) могут быть помещены любым образом, обеспечивающим четкий обзор входа 14, например, сверху. Видеодатчики 16 и антенны, расположенные в стойках 12, соединены с возможностью связи с системой 18 управления, осуществляющей управление работой системы 10 обнаружения экранирования маркера EAS.
На фиг.2 иллюстрирована альтернативная конфигурация системы 10 обнаружения экранирования маркера EAS. Как на фиг.1, антенны EAS, RFID и обнаружения металла показаны объединенными в двух стойках 12a, 12b на противоположных сторонах входа 14; однако в данной конфигурации видеодатчики 16a, 16b (собирательно обозначенные как видеодатчик 16) также интегрированы в стойках 12. Конфигурации, показанные на фиг.1 и 2, являются иллюстрацией возможных конфигураций аппаратного обеспечения и не предназначены для того, чтобы ограничить сферу применения настоящего изобретения. Возможны другие многочисленные конфигурации, позволяющие реализовать настоящее изобретение.
Как показано на фиг.3, система 10 обнаружения экранирования маркера EAS может включать в себя подсистему 20 обнаружения EAS и подсистему 22 обнаружения металла. Подсистема 20 обнаружения EAS обнаруживает присутствие активных меток EAS на предметах, в пределах зоны определения или обнаружения возле антенны 24 EAS. Аналогичным образом подсистема 22 обнаружения металла обнаруживает наличие специфических металлов в пределах зоны обнаружения возле антенны 26 обнаружения металла. Хотя и не показано явно, антенна 26 обнаружения металла обычно конфигурируется как пара антенн с передающей антенной, расположенной в одной стойке 12a, и приемной антенной, расположенной во второй стойке 12b. В общем случае, отдельная антенна или пара антенн принимает сигналы для каждой подсистемы, поскольку данные подсистемы работают на различных радиочастотах; однако возможно, чтобы данные подсистемы использовали ту же самую антенну или пару антенн. В альтернативных вариантах осуществления система 22 обнаружения металла может быть развернута отдельно, без интегральной подсистемы 20 EAS.
Система 10 также включает в себя подсистему 28 RFID, соединенную с антенной 30 RFID, и подсистему 32 анализа видеоизображений, соединенную, по меньшей мере, с одним датчиком 16 видеоизображений. Подсистема 28 RFID собирает информацию от активных меток RFID в пределах зоны опроса или обнаружения вблизи антенны 30 RFID. Подсистема 32 анализа видеоизображений считывает видеоизображения с датчика 16 видеоизображений и идентифицирует определенные объекты в видеоизображениях, в соответствии с известными методами анализа видеоизображений. В других вариантах осуществления только одна из подсистем 28 RFID и подсистема 32 анализа видеоизображений может быть развернута с подсистемой 22 обнаружения металла.
Датчик 16 видеоизображений и подсистема 32 анализа видеоизображений также могут использоваться для сбора иных данных, в дополнение к обнаружению объектов, для использования при обнаружении металлов. Данные применения включают в себя подсчет количества посетителей, проходящих через проход, мониторинг использования тележек для товаров, захват видеоизображений в случаях тревоги и т.д., но не ограничиваются ими.
Аналогичным образом антенна 30 RFID и подсистема 28 RFID могут использоваться для сбора иных данных метки RFID в дополнение к данным, используемым для улучшения эффективности подсистемы 22 обнаружения металла. Подсистема 28 RFID соединена с базой 34 данных предметов ложной тревоги RFID, которая содержит список кодов меток для предметов, о которых известно, что они могут вызвать ложные сигналы тревоги.
Система 10 обнаружения экранирования маркера EAS также включает в себя подсистему 36 сигналов тревоги/уведомлений, которая формирует сигналы тревоги или уведомления в ответ на положительное обнаружение экранирования маркера EAS или на иной определенный запуск, такой как обнаружение активной метки EAS в пределах зоны опроса.
Каждая подсистема, то есть подсистема 20 обнаружения EAS, подсистема 22 обнаружения металла, подсистема 28 RFID, подсистема 32 анализа видеоизображений и подсистема 36 сигналов тревоги/уведомлений, соединена с контроллером 18 системы обнаружения экранирования маркера EAS, который управляет всей работой системы 10 обнаружения экранирования маркера EAS. Контроллер 18 системы обнаружения экранирования маркера EAS, кроме того, соединен с системной базой 38 данных, которая может содержать многочисленные журналы, как, например, журнал 40 зависимости амплитуды объекта от расстояния и журнал 42 условий сигналов тревоги/уведомлений. Журнал 40 зависимости амплитуды объекта от расстояния подробно описывает амплитуду сигнала, принятого от подсистемы 22 обнаружения металла в качестве функции расстояния от антенны 24 обнаружения металла для разнообразных металлов. Журнал 42 условий сигналов тревоги/уведомлений включает в себя инструкции по реагированию на различные условия сигналов тревоги. Следует отметить, что хотя база данных 34 предметов ложной тревоги RFID изображена в виде объекта, отдельного от системной базы данных 38, обе базы данных могут быть физически реализованы в качестве единого устройства.
На фиг.4-6 представлены примерные функциональные блок-схемы последовательности операций, описывающие работу различных подсистем. На фиг.7 описана укрупненная (верхнего уровня) работа системы 10 обнаружения экранирования маркера EAS. На фиг.4 показана упрощенная примерная функциональная блок-схема последовательности операций, описывающая этапы, выполняемые подсистемой 22 обнаружения металла. Подсистема 22 обнаружения металла обычно работает в фазе обнаружения металла (этап S102) до тех пор, пока металл не обнаружен в зоне обнаружения (этап S104). При обнаружении металла подсистема 22 обнаружения металла сообщает данную информацию, включающую в себя амплитуду и фазу обнаруженного сигнала, контроллеру 18 системы обнаружения экранирования маркера EAS для дальнейшей обработки (этап S106). В альтернативных конфигурациях система может использовать только амплитуду либо только фазу.
На фиг.5 примерная функциональная блок-схема последовательности операций описывает этапы, выполняемые подсистемой 32 анализа видеоизображений. Подсистема 32 анализа видеоизображений обычно работает в фазе сбора видеоизображений (этап S108) до тех пор, пока объект не обнаружен в зоне обнаружения (этап S110). При обнаружении объекта подсистема 32 анализа видеоизображения предпринимает попытку классифицировать объект в известный класс объектов (этап S112). В данном типовом случае подсистема 32 анализа видеоизображений осуществляет классификацию объектов по трем классам: тележки для товаров, люди с сумками и люди без сумок. В альтернативных конфигурациях обнаруженные объекты могут быть классифицированы по другим классам, таким как инвалидные кресла-каталки, детские коляски, иная ручная кладь и т.д., но не ограничиваться перечисленным. Классификация объекта может быть осуществлена с помощью многочисленных алгоритмов классификации образов, известных квалифицированным специалистам в данной области техники, таких как сопоставление с эталоном, анализ основных компонентов и т.д.
Выходные сигналы этапа классификации (этап S112) могут включать в себя предполагаемый класс объекта и весовой показатель достоверности из классификации. Для иллюстрации высокое значение достоверности, например, близкое к 1, представляет очень высокую вероятность того, что результат алгоритма классификации является правильным. Низкое значение достоверности, например, близкое к 0, представляет очень низкую вероятность того, что результат алгоритма классификации является правильным.
В дополнение к классификации объектов подсистема анализа видеоизображений обеспечивает в качестве выходного сигнала измерение местоположения объекта и значение допуска измерения. Таким образом, если объект классифицируется как тележка (этап S114), то измеряется относительное положение тележки (этап S116), и соответствующая информация сообщается контроллеру 18 системы обнаружения экранирования маркера EAS для дальнейшей обработки (этап S118). Например, позиционный номер 150 может свидетельствовать о том, что объект находится на расстоянии 150 см от опорной точки, в стойке передатчика. Значение допуска, равное 10, может свидетельствовать о том, что подсистема анализа видеоизображений оценивает неопределенность позиционного номера с точностью +/-10 см.
При возврате к блоку S114 принятия решения в случае, если подсистема 32 анализа видеоизображений определяет, что объектом является человек, то выполняется (этап S120) процесс обнаружения переносимого объекта для того, чтобы определить, несет ли человек сумку. Если человек несет сумку (этап S122), то измеряется положение сумки (этап S124), и соответствующая информация, например класс, доверительный уровень, положение сумки, значение допуска положения сумки и направление движения (входит или выходит объект из помещения) сообщается контроллеру 18 системы обнаружения экранирования маркера EAS для дальнейшей обработки (этап S126). Если человек не несет сумку (этап S122), то измеряется положение существующего человека (этап S128), и релевантная информация, например, класс, доверительный уровень, положение, значение допуска положения и направление движения сообщается контроллеру 18 системы обнаружения экранирования маркера EAS для дальнейшей обработки (этап S130).
На фиг.6 представлена примерная упрощенная блок-схема последовательности операций подсистемы 28 RFID. Продавцы розничных товаров могут прикреплять метки RFID на предметы, о которых известно, что они вызывают ложные сигналы тревоги, тем самым улучшая функционирование системы 10 обнаружения экранирования маркера EAS. Подсистема 28 RFID обычно функционирует в фазе обнаружения метки RFID (этап S132) до тех пор, пока метка RFID не обнаружена в зоне обнаружения (этап S134). При обнаружении метки RFID подсистема 28 RFID считывает метку RFID, сравнивает код метки с журналом предметов ложного сигнала тревоги в базе 34 данных RFID предметов ложных сигналов тревоги (этап S136). Типичные виды предметов в журнале ложных сигналов тревоги включают в себя как оборудование магазина, такое как тележки для покупок, так и продукты, о которых известно, что они могут привести к срабатыванию системы металлоискателя. Примеры продуктов из супермаркета включают в себя жареных цыплят, сохраняемых горячими в пакете из фольги, смеси для детского питания, и т.д. Если обнаруженная метка находится в базе 34 данных предметов ложной тревоги RFID (этап S138), то подсистема 28 RFID сообщает о предмете и его классе контроллеру 18 системы обнаружения экранирования маркера EAS для дальнейшей обработки (этап S140). Если обнаруженная метка не находится в базе 34 данных сигналов ложной тревоги RFID (этап S138), то подсистема 28 RFID сообщает о предмете и об определении того, что предмет отсутствует в базе 34 данных предметов ложной тревоги RFID, контроллеру 18 системы обнаружения экранирования маркера EAS для дальнейшей обработки (этап S142).
На фиг.7 представлена примерная рабочая блок-схема последовательности укрупненных (верхнего уровня) операций работы системы 10 обнаружения экранирования маркера EAS. Входные сигналы от подсистемы 22 обнаружения металла (разъем А на фиг.4) подсистемы 32 анализа видеоизображений (разъем В на фиг.5) и подсистемы 28 RFID (разъем С на фиг.6) объединяются и анализируются, чтобы обеспечить улучшение эффективности обнаружения металла. В данном варианте осуществления амплитуда металлоискателя (этап S144) от подсистемы 22 металлоискателя и данные о положении, допуске и направлении движения объекта (этап S146) отображаются и сравниваются с базой данных зависимости амплитуды от расстояния до объекта (этап S148) для того, чтобы вывести предполагаемый класс объекта и весовой показатель достоверности. Класс объекта и весовые показатели достоверности от подсистемы 32 анализа видеоизображений (этап S150) и входные сигналы от подсистемы 28 RFID (этап S152) объединяются с предполагаемым классом объекта и весовым показателем достоверности, получающимися в результате сравнения амплитуды сигнала подсистемы 22 обнаружения металла для того, чтобы вычислить объединенную системную оценку для класса объекта и достоверности (этап S154). Специалистам в данной области техники известно много различных способов, которые могут использоваться для вычисления такого объединенного класса объекта и оценки достоверности, включающих в себя подходы линейных систем, подходы нейронных сетей и подходы нечеткой логики, но не ограничиваясь ими. Например, может быть использована простая линейная система для отображения результата, который затем может быть сравнен с простым фиксированным порогом для индивидуальных классов объектов, хранящимся в журнале 42 условий сигналов тревоги/уведомлений (этап S156). Линейная система отображения и база данных фиксированных пороговых значений используются только в иллюстративных целях, однако могут использоваться иные, более гибкие подходы из области самообучения машины, известные квалифицированным специалистам в данной области техники, для развертывания адаптивной системы, способной к самообучению в условиях окружающей среды и адаптации к изменениям условий, характерных для розничной торговли.
Контроллер 18 системы обнаружения экранирования маркера EAS отправляет инструкции в подсистему 36 сигналов тревоги/уведомлений на основании соответствующего действия, найденного в журнале 42 условий сигналов тревоги/уведомлений. Например, подсистема 36 сигналов тревоги/уведомлений может активировать звуковой или визуальный сигнал тревоги, объявить тревогу, либо уведомить по электронной почте службу безопасности или иной персонал, вызвать правоохранительные органы и т.д. В определенных ситуациях подсистема 36 сигналов тревоги/уведомлений может только выдавать сигнал тревоги, когда объект входит в магазин снаружи. Данный критерий помог бы выявлять людей, приносящих в магазин сумки, выложенные фольгой, для того чтобы обращать особое внимание персонала службы безопасности на таких посетителей и помочь при сборе доказательств кражи в магазине.
На фиг.8 представлен график, иллюстрирующий амплитуды от двух металлических объектов в подсистеме 22 обнаружения металла в функции расстояния от передающей антенны 26a обнаружения металла. Объект 44 представляет собой сумку, выложенную фольгой, расположенную на расстоянии X1 от передающей (Tx) антенны 26a. Объект 46 представляет собой тележку для покупок, расположенную на расстоянии X2 от Tx антенны 26a. На фиг.8 также показан набор кривых 48, 50, отражающих соотношение между амплитудой выходного сигнала схемы обнаружения металла в качестве функции расстояния до объекта от Tx антенны 26a. Верхняя кривая 48 показывает типичную амплитуду в качестве функции расстояния для тележки покупателя, которая представляет собой большой металлический объект. Нижняя кривая 50 показывает типичную амплитуду в качестве функции расстояния для сумки, выложенной фольгой, которая представляет собой меньший по размеру металлический объект, чем тележка для покупок. График показывает, что одна схема обнаружения металла не может сообщить разницу между сумкой, выложенной фольгой, находящейся на расстоянии Х1 от Tx антенны 26a, от тележки для покупок, находящейся на расстоянии X2 от Tx антенны 26a, поскольку сигналы отклика от обоих предметов демонстрируют одинаковую амплитуду.
В качестве иллюстрации на фиг.9 показано, как настоящее изобретение улучшает обнаружение различений между предметами. Для нескольких различных классов металлических объектов показано соотношение между амплитудой выходного сигнала металлоискателя и расстоянием объекта от антенны. Кривая 48 представляет собой типовую кривую отклика для тележки покупателя, кривая 52 представляет инвалидное кресло-каталку, кривая 54 представляет большую сумку, выложенную фольгой, кривая 56 представляет сумку средних размеров, выложенную фольгой, а кривая 58 представляет небольшую сумку, выложенную фольгой. Поскольку подсистема 32 анализа видеоизображений обеспечивает оценку расстояния целевого объекта от Tx антенны 26a, а подсистема 22 обнаружения металла согласно данному изобретению обеспечивает амплитуду отклика схемы обнаружения, то оба эти выходные сигналы могут быть объединены с другой информацией для того, чтобы принять лучшее решение о классе металлического объекта, обнаруженного в системе 10. Благодаря лучшему классифицированию данного объекта, в соответствии с этой дополнительной информацией, может быть распознано лучшее решение. Например, на фиг.9 амплитуда и оцененное расстояние объединены для того, чтобы сформировать оценку класса объекта и весовой показатель достоверности, который оценивает степень достоверности того, что оценка классификации корректна.
Обращаясь еще раз к фиг.7, выходные сигналы каждой из этих отдельных подсистем, то есть подсистемы 20 обнаружения EAS, подсистемы 22 обнаружения металла, подсистемы 28 RFID, подсистемы 32 анализа видеоизображений и подсистемы 36 сигналов тревоги/уведомления, наряду с весовыми показателями достоверности от каждой из подсистем, объединяются для того, чтобы принять итоговое решение о выдаче сигнала тревоги или уведомления о том, что в зоне обнаружения находится сумка, выложенная фольгой. Способ принятия данного решения может быть реализован многими различными способами, включающими в себя линейные методы или методы нейронных сетей. Способ, показанный на фиг.7, осуществляет простое взвешенное суммирование каждого из выходных сигналов подсистемы и сравнивает взвешенную сумму с заданным пороговым значением. Могут также использоваться много других подходящих способов, известных квалифицированным специалистам в данной области техники, из распознавания образов и обучения машины, для определения наилучшего результата. Кроме того, могут использоваться адаптивные методы обучения для того, чтобы обеспечить системе возможность адаптации к условиям в рамках окружающей среды для установки.
Настоящее изобретение может быть реализовано аппаратным оборудованием, программным обеспечением или объединением аппаратного оборудования и программного обеспечения. Любой тип вычислительной системы или иного аппарата, приспособленного для реализации способов, описанных здесь, является подходящим для выполнения описанных здесь функций.
Типовое объединение аппаратного оборудования и программного обеспечения может представлять собой специализированную или универсальную компьютерную систему, имеющую один или несколько обрабатывающих элементов, и компьютерную программу, записанную в запоминающей среде, которая при загрузке и исполнении управляет компьютерной системой таким образом, чтобы реализовать описанные здесь способы. Настоящее изобретение также может быть встроено в компьютерный программный продукт, который содержит все особенности, позволяющие осуществить реализацию способов, описанных здесь, и который, будучи загруженным в компьютерную систему, может осуществить выполнение данных способов. Запоминающая среда может относиться к энергозависимому или энергонезависимому устройству хранения.
В настоящем контексте компьютерная программа или приложение означает любое выражение, на любом языке, код или запись множества инструкций, предназначенных для того, чтобы заставить систему, имеющую возможность обработки информации, выполнить специфическую функцию непосредственно сразу либо после выполнения одного или обоих из следующего: a) преобразования на другой язык, код или записи; b) воспроизведения в другой материальной форме.
Кроме того, если не оговорено иное, то следует учитывать, что все сопроводительные фигуры приведены без соблюдения масштаба. Существенным является то, что данное изобретение может быть воплощено в других специфических формах, без отступления от его сути или существенных признаков, и соответственно, с учетом ссылки на нижеприведенную формулу изобретения, в большей степени, чем на предшествующее подробное описание, как указано в описании области применения настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ МЕТАЛЛА С ИНТЕГРИРОВАННОЙ СИСТЕМОЙ НАПРАВЛЕННОГО ДЕЙСТВИЯ ПОДСЧЕТА ЛЮДЕЙ | 2009 |
|
RU2544796C2 |
| EAS-СЧИТЫВАТЕЛЬ, ОБНАРУЖИВАЮЩИЙ EAS-ФУНКЦИЮ В RFID-УСТРОЙСТВЕ | 2005 |
|
RU2400818C2 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| СИСТЕМА ОХРАНЫ, ЗАЩИТЫ И МОНИТОРИНГА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2250844C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| СИСТЕМА И СПОСОБ МОНИТОРИНГА ПАЦИЕНТА | 2015 |
|
RU2679864C2 |
| СПОСОБ, МОДУЛЬ, ТЕРМИНАЛ И СИСТЕМА, ОБЕСПЕЧИВАЮЩИЕ СОГЛАСОВАННУЮ РАБОТУ ПОДСИСТЕМЫ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОДСИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 2005 |
|
RU2409896C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ДОСТУПОМ И ОХРАНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2320503C1 |
| Система бесконтактной оплаты проезда/прохода (СБОП) | 2018 |
|
RU2692343C1 |
| ЗАЩИТА ПЕРСОНАЛЬНЫХ ДАННЫХ, СОДЕРЖАЩИХСЯ В УСТРОЙСТВЕ С ПОДДЕРЖКОЙ RFID | 2017 |
|
RU2736871C2 |
Изобретение относится к системе и способу для обнаружения экранирования маркера электронной системы наблюдения за перемещением предметов посредством электронной системы наблюдения за перемещением предметов ("EAS"), подсистем обнаружения металла и анализа видеоизображений, соединенных с возможностью связи с системным контроллером. Технический результат заключается в исключении формирования ложных сигналов тревог. Подсистема EAS обнаруживает маркеры EAS в пределах зоны обнаружения. Подсистема обнаружения металла обнаруживает металлические объекты в пределах зоны обнаружения. Подсистема анализа видеоизображений захватывает видеоизображение металлического объекта. Системный контроллер определяет предполагаемую классификацию для металлического объекта и вычисляет весовой показатель достоверности для предполагаемой классификации. Если металлический объект идентифицирован как экранирование маркера EAS, согласно предполагаемой классификации и соответствующему весовому показателю достоверности, то формируется сигнал тревоги. 3 н. и 17 з.п. ф-лы, 9 ил.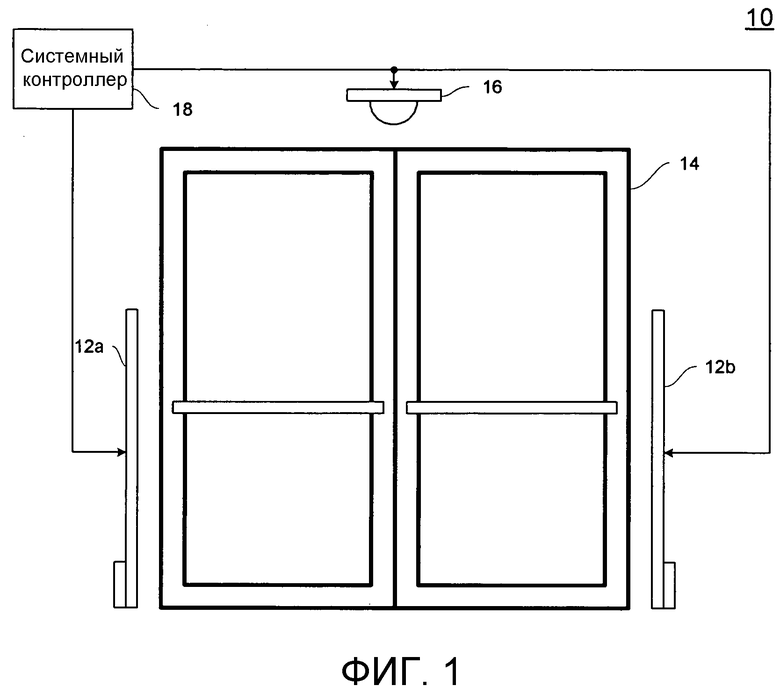
1. Система для обнаружения экранирования маркера электронной системы наблюдения за перемещением предметов, причем система содержит:
электронную подсистему наблюдения за перемещением предметов, осуществляющую обнаружение маркеров электронной системы наблюдения за перемещением предметов в пределах зоны обнаружения;
подсистему обнаружения металла, включающую в себя по меньшей мере одну передающую антенну, причем подсистема обнаружения металла осуществляет обнаружение металлического объекта в пределах зоны обнаружения;
подсистему анализа видеоизображений, осуществляющую захват по меньшей мере одного видеоизображения металлического объекта; и
системный контроллер, соединенный с возможностью связи с электронной подсистемой наблюдения за перемещением предметов, с подсистемой обнаружения металла и с подсистемой анализа видеоизображений, причем системный контроллер осуществляет:
определение первой предполагаемой классификации для металлического объекта; вычисление весового показателя достоверности для первой предполагаемой классификации; идентификацию металлического объекта как экранирование маркера электронной системы наблюдения за перемещением предметов, согласно первой предполагаемой классификации и соответствующему весовому показателю достоверности; и
формирование сигнала тревоги.
2. Система по п.1, в которой подсистема анализа видеоизображений, кроме того, осуществляет определение направления движения металлического объекта, причем системный контроллер только формирует сигнал тревоги в ответ на определение подсистемой анализа видеоизображений, что направлением движения является движение в контролируемое помещение.
3. Система по п.1, в которой:
подсистема обнаружения металла, кроме того, определяет амплитуду ответного сигнала;
подсистема анализа видеоизображений, кроме того, измеряет расстояние между металлическим объектом и передающей антенной; и
системный контроллер определяет первую предполагаемую классификацию для металлического объекта путем корреляции амплитуды ответного сигнала и расстояния между металлическим объектом и передающей антенной с данными, соответствующими предварительно определенным классам объектов.
4. Система по п.3, в которой предварительно определенные классы объектов включают в себя по меньшей мере два из: тележки, человека, несущего сумку, человека, не несущего сумку, инвалидного кресла-каталки, посетителя и переносимого объекта.
5. Система по п.3, в которой подсистема анализа видеоизображений, кроме того, осуществляет:
обеспечение значения допуска для измерения расстояния; и
использование значения допуска для вычисления весового показателя достоверности для первой предполагаемой классификации.
6. Система по п.1, в которой формирование сигнала тревоги содержит по меньшей мере одно из: звучания звукового сигнала тревоги, активации визуального сигнала тревоги и передачи уведомления о сигнале тревоги.
7. Система по п.1, кроме того, содержащая:
подсистему радиочастотной идентификации, соединенную с возможностью связи с системным контроллером, причем подсистема радиочастотной идентификации осуществляет:
обнаружение метки радиочастотной идентификации в зоне обнаружения;
прием кода метки от метки радиочастотной идентификации;
сравнение кода метки со списком кодов предметов ложной тревоги; и
идентификацию металлического объекта как не являющегося экранированием маркера электронной системы наблюдения за перемещением предметов, в ответ на определение того, что код метки включен в список кодов предметов ложной тревоги.
8. Система по п.1, в которой подсистема анализа видеоизображений, кроме того, осуществляет:
определение второй предполагаемой классификации объекта согласно предварительно определенным классам объектов, с использованием методов распознавания объектов видеоизображений; и
вычисление весового показателя достоверности для второй предполагаемой классификации.
9. Система по п.8, в которой системный контроллер, кроме того, осуществляет:
объединение первой предполагаемой классификации объекта и соответствующего весового показателя достоверности со второй предполагаемой классификацией объекта и соответствующим весовым показателем достоверности для вычисления системной классификации объекта и соответствующего системного весового показателя достоверности; и
идентификацию металлического объекта, в соответствии с системной предполагаемой классификацией и соответствующим системным весовым показателем достоверности.
10. Система по п.9, кроме того, содержащая:
подсистему радиочастотной идентификации, соединенную с возможностью связи с системным контроллером, причем подсистема радиочастотной идентификации осуществляет:
обнаружение метки радиочастотной идентификации в зоне обнаружения;
прием кода метки от метки радиочастотной идентификации;
сравнение кода метки со списком кодов предметов ложной тревоги, и
идентификацию металлического объекта как не являющегося экранированием маркера электронной системы наблюдения за перемещением предметов, в ответ на определение того, что код метки включен в список кодов предметов ложной тревоги.
11. Система для обнаружения экранирования маркера электронной системы наблюдения за перемещением предметов, причем система содержит:
электронную подсистему наблюдения за перемещением предметов, осуществляющую обнаружение маркеров электронной системы наблюдения за перемещением предметов в пределах зоны обнаружения;
подсистему обнаружения металла, осуществляющую обнаружение металлических объектов в пределах зоны обнаружения.
подсистему радиочастотной идентификации, осуществляющую:
обнаружение метки радиочастотной идентификации в зоне обнаружения;
прием кода метки от метки радиочастотной идентификации; и
определение, включен ли код метки в список кодов предметов ложной тревоги,
системный контроллер, соединенный с возможностью связи с электронной подсистемой наблюдения за перемещением предметов, с подсистемой обнаружения металла и с подсистемой радиочастотной идентификации, причем системный контроллер осуществляет:
формирование сигнала тревоги в ответ на обнаружение металлического объекта подсистемой обнаружения метала в пределах зоны обнаружения и определение подсистемой радиочастотной идентификации того, что код метки не включен в список кодов предметов ложной тревоги; и
идентификацию металлического объекта как не являющегося экранированием маркера электронной системы наблюдения за перемещением предметов, в ответ на обнаружение металлического объекта подсистемой обнаружения металла в пределах зоны обнаружения и определение подсистемой радиочастотной идентификации того, что код метки включен в список кодов предметов ложной тревоги.
12. Система по п.11, в которой формирование сигнала тревоги содержит, по меньшей мере, одно из: звучания звукового сигнала тревоги, активации визуального сигнала тревоги и передачи уведомления о сигнале тревоги.
13. Способ для обнаружения экранирования маркера электронной системы наблюдения за перемещением предметов, причем способ содержит:
обеспечение электронной подсистемы наблюдения за перемещением предметов, для обнаружения маркеров электронной системы наблюдения за перемещением предметов в пределах зоны обнаружения;
обнаружение металлического объекта в пределах зоны обнаружения;
захват видеоизображения металлического объекта;
определение первой предполагаемой классификации для металлического объекта;
вычисление весового показателя достоверности для первой предполагаемой классификации;
идентификацию металлического объекта как экранирование маркера системы электронного наблюдения за перемещением предметов, согласно первой предполагаемой классификации и соответствующему весовому показателю достоверности; и
формирование сигнала тревоги.
14. Способ по п.13, кроме того, содержащий:
передачу сигнала обнаружения металла;
определение амплитуды ответного сигнала для сигнала обнаружения металла;
измерение расстояния между металлическим объектом и передающей антенной; и
определение первой предполагаемой классификации для металлического объекта, путем корреляции амплитуды ответного сигнала и расстояния между металлическим объектом и передающей антенной с данными, соответствующими предварительно определенным классам объектов.
15. Способ по п.14, при котором предварительно определенные классы объектов включают в себя, по меньшей мере, два из: тележки, человека, несущего сумку, человека, не несущего сумку, инвалидного кресла-каталки, посетителя и переносимого объекта.
16. Способ по п.14, кроме того, содержащий:
обеспечение значения допуска для измерения расстояния; и
использование значения допуска для вычисления весового показателя достоверности для первой предполагаемой классификации.
17. Способ по п.13, при котором формирование сигнала тревоги содержит по меньшей мере одно из: звучания звукового сигнала тревоги, активации визуального сигнала тревоги и передачи уведомления о сигнале тревоги.
18. Способ по п.13, кроме того, содержащий: обнаружение метки радиочастотной идентификации в зоне обнаружения;
прием кода метки от метки радиочастотной идентификации;
сравнение кода метки со списком кодов предметов ложной тревоги; и
идентификацию объекта как не являющегося экранированием маркера электронной системы наблюдения за перемещением предметов в ответ на определение того, что код метки включен в список кодов предметов ложной тревоги.
19. Способ по п.13, кроме того, содержащий:
определение второй предполагаемой классификации объекта, согласно предварительно определенным классам объектов, с использованием методов распознавания объектов видеоизображений;
вычисление весового показателя достоверности для второй предполагаемой классификации;
объединение первой предполагаемой классификации объекта и соответствующего весового показателя достоверности со второй предполагаемой классификацией объекта и соответствующим весовым показателем достоверности для вычисления системной классификации объекта и соответствующего системного весового показателя достоверности; и
идентификацию металлического объекта, в соответствии с системной предполагаемой классификацией и соответствующим системным весовым показателем достоверности.
20. Способ по п.19, кроме того, содержащий:
обнаружение метки радиочастотной идентификации в зоне обнаружения;
прием кода метки от метки радиочастотной идентификации;
сравнение кода метки со списком кодов предметов ложной тревоги; и
идентификацию металлического объекта как не являющегося экранированием маркера электронной системы наблюдения за перемещением предметов в ответ на определение того, что код метки включен в список кодов предметов ложной тревоги.

