Изобретение относится к способу возврата в исходное положение отпущенного для торможения аварийного тормоза движущегося элемента подъемного устройства и к защитному устройству в подъемном устройстве.
Подъемное устройство установлено в здании. Оно состоит, по существу, из кабины, соединенной при помощи несущего средства с противовесом или со второй кабиной. Посредством привода, выборочно воздействующего на несущие средства или непосредственно на кабину или противовес, кабина передвигается, по существу, вертикально вдоль направляющих рельсов. Подъемное устройство используют для транспортировки людей и грузов внутри здания на несколько или большое количество этажей.
Подъемное устройство содержит устройства для обеспечения безопасности кабины лифта в случае отказа привода или несущих средств. Для этого используют, как правило, аварийные тормоза, которые могут в случае необходимости затормозить кабину лифта на направляющих рельсах.
В настоящее время известны аварийные тормоза с электромеханическим блокирующим устройством с возможностью фиксации аварийного тормоза в исходном положении и отпускания аварийного тормоза для торможения в деактивированном состоянии. Такой аварийный тормоз описан в EP 1930282. Для возврата в исходное положение этого аварийного тормоза электромеханическое блокирующее устройство должно создавать давление воздуха для преодоления зазора. Преодоление зазора для возврата в исходное положение обуславливает соответствующим образом рассчитанные размеры электромеханического устройства.
Другие аварийные тормоза оборудованы электромеханическими разъединяющими устройствами. В них, например, запираемый механически аварийный тормоз фиксируется в исходном положении и отпускается посредством сигнала активации для торможения. При дальнейшем движении кабины лифта или движущегося элемента аварийный тормоз самостоятельно устанавливается в положение торможения. Такой аварийный тормоз описан, например, в публикации EP 1733992. Это устройство требует надежного энергоснабжения, создающего возможность для надежного срабатывания аварийного тормоза даже при более продолжительном разрыве энергетической сети.
Задача предлагаемого изобретения состоит в создании способа и соответствующего защитного устройства для эксплуатации аварийного тормоза, например, при более продолжительном перебое энергоснабжения или после другого не обусловленного безопасностью отключения. Само собой разумеется, что способ должен обеспечивать безопасность подъемного устройства в любое время.
Описанные в дальнейшем решения позволяют решать эту задачу.
Согласно одному аспекту изобретения подъемное устройство оборудовано защитным устройством. Оно содержит аварийный тормоз, снабженный защитным выключателем, разрывающим цепь безопасности тормоза, если аварийный тормоз отпущен для торможения. Защитное устройство содержит, кроме того, защитный блок управления тормоза, отпускающий аварийный тормоз в случае необходимости для торможения, если, с одной стороны, в подъемном устройстве обнаружена неисправность или критическое событие, или, с другой стороны, также, если наступает событие, оцененное как некритическое. Не критически оцененным событием может быть, например, перебой в электроснабжении в здании или продолжительное отключение подъемника, или также выполненное с целью проверки событие. Защитный блок управления тормоза регистрирует при отпускании аварийного тормоза для торможения предпочтительно причину или событие отпускания аварийного тормоза. Как только блок управления лифтом распознает, с одной стороны, что цепь безопасности подъемника или цепь безопасности тормоза разорвана, а, с другой стороны, защитный блок управления тормоза сообщит о некритической причине срабатывания аварийного тормоза, блок управления лифтом включит автоматический возврат в исходное положение аварийного тормоза. Автоматический означает, по существу, начало процесса возврата в исходное положение аварийного тормоза без участия человека.
Согласно одному аспекту изобретения аварийный тормоз движущегося элемента подъемного устройства снабжен предпочтительно электромеханическим блокирующим устройством, отпускающим аварийный тормоз для торможения в деактивированном положении. После отпускания аварийный тормоз будет предпочтительно возвращен в исходное положение при перемещении на первом этапе движущегося элемента в первом направлении движения. Вследствие этого аварийный тормоз затягивается, по меньшей мере, частично или, во всяком случае, подтягивается. Одновременно или на отрезке времени перед или после этого первого движения активируется блокирующее устройство аварийного тормоза с целью подготовки его для фиксации аварийного тормоза в его исходном положении. Затем движущийся элемент перемещается в противоположном первому направлению движения - во втором направлении движения. Это приводит аварийный тормоз в исходное положение, где он фиксируется активированным блокирующим устройством. Благодаря этому аварийный тормоз снова находится в своем исходном положении. Предпочтительно, если возврат в исходное положение может происходить, по меньшей мере, частично, как автоматизированный процесс. Под этим действием аварийный тормоз независимо от моментального состояния сцепления входит в участок зажима. На участке зажима в аварийном тормозе производится предварительное натягивание, создающее возможность для отведения блокирующего устройства и тормозных механизмов аварийного тормоза в исходное положение.
Если аварийный тормоз активирован, например, вследствие более длительного перебоя в электроснабжении здания, т.е. когда блокирующее устройство деактивировано, то, например, тормозной механизм аварийного тормоза подан к рельсу. Тем не менее, хотя движение кабины, или никакого движения одного из движущихся элементов не происходит, поскольку в здании отсутствует электроэнергия, аварийный тормоз, по существу, не сцеплен. Поэтому аварийный тормоз также и не затягивается. Тем не менее, хотя в аварийных тормозах прежде указанного вида возврат в исходное положение блокирующего или аварийного тормоза может происходить вследствие относительного движения между аварийным тормозом и тормозным рельсом, этот возврат не может захватываться, так как аварийные тормоза еще не затянуты. При осуществленных согласно этому аспекту изобретения целенаправленных перемещениях аварийный тормоз затягивается при первом движении и возвращается в исходное положение при втором движении.
Предпочтительно, если в качестве первого направления движения используют направление движения вниз, а в качестве второго направления движения, соответственно, - направление движения вверх. Это предпочтительно, так как многие подъемные устройства снабжены только одним аварийным тормозом для защиты от падения движущегося элемента. Таким образом, выбором направления движения вниз, в качестве первого направления движения, определен выбор, который соответствующим образом можно применять ко всем подъемным устройствам. Кроме того, тогда для движения во втором направлении движения в распоряжении имеется максимальное усилие отрыва, поскольку, как правило, в такой ситуации эксплуатации кабина лифта пуста и вследствие этого для движения имеется избыточный вес противовеса.
Предпочтительно блокирующее устройство аварийного тормоза активировано перед движением движущегося элемента во втором направлении движения. Благодаря такой предшествующей активации блокирующего устройства может отпадать необходимость в точной настройке времени активации. Так как блокирующее устройство достигает когда-нибудь активированного положения в ходе движения кабины, оно непосредственно фиксируется при предшествующем включении. Особенно предпочтительно, если блокирующее устройство аварийного тормоза активируется уже перед движением движущегося элемента в первом направлении движения. Вследствие этого можно просто создавать подготовленный проверочный и подготовительный алгоритм.
Предпочтительно, если движение движущегося элемента выполняется в первом направлении движения до тех пор, пока аварийный тормоз не будет зажат, по меньшей мере, частично на предусмотренной для торможения тормозной рабочей поверхности. Предусмотренной для торможения рабочей поверхностью тормоза является, как правило, тормозной рельс, или направляющее ребро направляющего рельса, являющееся одновременно тормозным рельсом. Это первое движение движущегося элемента обеспечивает минимальное затягивание аварийного тормоза или, по меньшей мере, его частичный зажим на тормозном рельсе.
Предпочтительно, если осуществленный, по меньшей мере, частичный зажим аварийного тормоза на предусмотренной для торможения рабочей тормозной поверхности определяют, устанавливая путь перемещения движущегося элемента, предпочтительно посредством измерения вращательного движения ведущего шкива и сравнения его с заданным значением пути. Как только движущийся элемент пройдет определенный путь перемещения, установленный, как правило, экспериментально, можно считать, что произошел частичный зажим аварийного тормоза. Обыкновенные приводы подъемника уже располагают измерительными системами, такими как тахометр или инкрементальный датчик на ведущем валу для определения посредством вращательного движения ведущего шкива пути перемещения. Это выполнение соответственно является предпочтительным.
Альтернативно или дополнительно можно устанавливать движущий момент приводного двигателя предпочтительно посредством измерения тока привода, причем этот движущий момент сравнивается с заданным моментом. Как только движущий момент достигнет заранее определенной величины или превысит ее, можно исходить из того, что произошел, по меньшей мере, частичный зажим аварийного тормоза. Это выполнение особенно надежно, так как движущий момент дает непосредственное указание на произошедший зажим.
Альтернативно также можно устанавливать продолжительность движения движущегося элемента в первом направлении движения и сравнивать ее с предельным значением времени. В этом случае необходимая продолжительность времени также устанавливается предпочтительно экспериментально. Это выполнение является особенно экономически целесообразным выполнением, так как нет необходимости в специальных датчиках.
Предпочтительно, если вслед за первым движением движущегося элемента выполняется движение движущегося элемента во втором направлении движения. Это второе движение выполняется до тех пор, пока цепь безопасности тормоза не замкнется, а движущийся элемент не пройдет заранее определенный участок движения. Замыкание цепи безопасности тормоза показывает, как правило, что аварийный тормоз снова находится в своем исходном положении. Дополнительно пройденный участок движения обеспечивает, чтобы все компоненты аварийного тормоза и, во всяком случае, всего движущегося элемента, были освобождены.
Альтернативно или в качестве дополнения также контролируется движущий момент приводного двигателя, а движение движущегося элемента во втором направлении движения заканчивается, когда движущий момент достигнет индикаторной величины. Как правило, значительный движущий момент требуется для движения движущегося элемента во втором направлении движения, так как аварийный тормоз должен выдвигаться из своего положения зажима. Затем посредством измерения можно установить, когда движущий момент или пусковой момент превысит предельную величину, а затем вернется, по существу, до постоянной величины, или в диапазон индикаторной величины.
Предпочтительно, если определены критерии прерывания, прерывающие движение движущегося элемента во втором направлении движения или, по меньшей мере, останавливающие его, если, например, движущий момент приводного двигателя достигает максимального предельного значения или превосходит его. К этому предельному значению можно добавить ограничение по времени. Это означает, что движение движущегося элемента во втором направлении движения прерывается, когда движущий момент приводного двигателя превысит параметры предельной величины в течение заранее определенного ограничения по времени. Альтернативно может быть задана также предельная продолжительность временного ограничения второго движения.
Предпочтительно движение движущегося элемента также прерывается во втором направлении движения, если в шахте лифта он проехал пограничное положение движущегося элемента или, если определено небезопасное состояние подъемного устройства. В отдельных случаях, например, когда электронный ограничитель скорости фиксирует слишком высокую скорость, снова деактивируется блокирующее устройство аварийного тормоза, что приводит в любом случае, независимо от состояния возврата в исходное положение, к непосредственному приведению в действие аварийного тормоза. Вместе с тем, при возврате в исходное состояние могут учитываться особые события. В частности, например, в здании может произойти случайный перебой в электроснабжении, когда кабина лифта, или движущийся элемент находится в шахте лифта на самом верху или в самом низу в крайнем положении или в пограничном положении близко к концу шахты. Так как кабина лифта в этой ситуации уже находится в конце шахты, естественно, нельзя выполнить длительное движение в одном из направлений движения. В таких единичных случаях критерии прекращения движения предотвращают возможное повреждение.
Предпочтительно повторять шаги возврата в исходное положение избирательно, если после произошедшего окончания или после произошедшего прерывания движения движущегося элемента во втором направлении движения цепь безопасности тормоза не замкнута. Это помогает в том случае, если при первой попытке возврата в исходное положение пускового момента при трогании не достаточно для отрыва движущегося элемента, или аварийного тормоза. Тогда избирательно можно снова инициировать возврат в исходное положение. Это может повторяться, например, от двух до трех раз. В том случае, если после этих неоднократных попыток нельзя успешно завершить возврат в исходное положение, предпочтительно прерывается автоматический возврат в исходное положение. Тогда операцию по возврату в исходное положение может проводить опять же, например, только уполномоченное лицо, например, техник сервиса.
Предпочтительно, если положение готовности аварийного тормоза контролируется, а цепь безопасности тормоза подъемного устройства замыкается, если аварийный тормоз в своем положении готовности и блокирующее устройство активированы. С другой стороны, цепь безопасности тормоза подъемного устройства будет или остается разорванной до тех пор, пока аварийный тормоз или блокирующее устройство не будут находиться в своем положении готовности. Этим обеспечивается, что подъемное устройство не может перейти в нормальный режим работы до тех пор, пока аварийный тормоз не находится в своем положении готовности.
Предпочтительно перед движением движущегося элемента в первом направлении движения проверяют цепь безопасности подъемника, а движение в первом направлении движения выполняют только тогда, когда заданные элементы цепи безопасности подъемника считаются исправными. Этим обеспечивается безопасность подъемного устройства и возможных при определенных обстоятельствах пользователей рядом с подъемным устройством. Например, цепь безопасности подъемника разомкнута, если места доступа к шахте лифта не закрыты или не работоспособны важные функциональные детали, например устройство натяжения троса, устройство амортизатора, устройство регистрации положения или измерительное устройство скорости и т.д. Предпочтительно заданные элементы цепи безопасности подъемника за исключением цепи безопасности тормоза содержат все остальные элементы цепи безопасности подъемника. Цепь безопасности тормоза предпочтительно шунтируется, так как она естественно разорвана, поскольку аварийный тормоз при деактивированном блокирующем устройстве больше не находится в своем исходном положении. Поэтому необходимо исключать этот элемент цепи безопасности подъемника при оценке старта возврата в исходное положение.
Предпочтительно на первом этапе перед осуществлением шагов возврата в исходное положение запрашивают статус неисправности блока управления тормозом и в зависимости от статуса неисправности выбирают подходящую операцию.
Шаги возврата в исходное положение могут инициироваться, например, автоматически, если блокировочное устройство вследствие оцененного некритическим события деактивировано, если одновременно определены безопасными цепь безопасности подъемного устройства и существенные элементы устройства подъемника. Некритическими событиями являются, например, сознательное деактивирование блокировочного устройства, как следствие перебоя в электроснабжении, с целью экономии энергии в остановленном подъемном устройстве или если деактивирование блокировочного устройства происходит как следствие самодиагностики. Автоматическая инициализация шагов возврата в исходное положение предполагает, что блок управления, например блок управления лифтом, генерирует и выполняет соответствующую команду на движение, управляя соответствующим образом приводом подъемника.
С другой стороны, шаги возврата в исходное положение могут инициироваться также вручную, если блокирующее устройство не деактивировалось, как следствие оцененного некритическим события или если цепь безопасности подъемного устройства не считает устройство безопасным. Это означает, что требуется оценка правомочного или уполномоченного лица. Это лицо оценивает состояние подъемника, дает указание о необходимом ремонте или во всяком случае самостоятельно проводит его. После того, как состояние подъемного устройства оценено уполномоченным лицом как безопасное, он может инициировать соответствующими командами возврат защитного устройства или аварийного тормоза в исходное положение, причем в этом случае эти шаги возврата в исходное положение выборочно осуществляются непосредственно уполномоченным лицом или оно только дает разрешение на автоматическое инициирование шагов возврата в исходное положение. Этот способ наилучшим образом в любое время обеспечивает надежность подъемного устройства и одновременно подъемное устройство не выводится из эксплуатации без необходимости.
Предпочтительно ручное инициирование шагов возврата в исходное положение выполняется уполномоченным лицом, как это разъяснено прежде. Для этого предпочтительно проверяют полномочия уполномоченного лица для установления его полномочий в отношении выполнения необходимых квалифицированных действий. Для этого требуется, например, ввести код доступа в блок управления тормозом или в блок управления лифтом. Посредством простой проверки блок управления может определить соответствие этого кода доступа заданным величинам. Этот код доступа может быть отмечен в сервисных документах или соответствовать части идентификационного номера блока управления тормозом.
Альтернативно также может использоваться заданный цикл команд и действий по проверке полномочий. Например, двукратное приведение в действие кнопки вызова подъемника с последующим приведением в действие в течение заданного времени кнопки управления.
Альтернативно предпочтительно с блоком управления тормозом или с блоком управления лифтом может соединяться также персональный ключ. Ключ может быть механическим ключом, представляющим возможность доступа к определенным функциям подъемника. Это может быть также электронный ключ в виде электронной карты или ей подобной, представляющей возможность доступа к определенным функциям подъемника. Разные решения позволяют достигать отрегулированного для подъемного устройства уровня безопасности и эксплуатационной готовности.
Предпочтительно ручное инициирование шагов возврата в исходное положение содержит ручное квитирование статуса блока управления тормозом. В частности, уполномоченное лицо должно подтвердить записанный в блоке управления тормозом статус или статус неисправности, естественно после компетентной оценки и ремонта. Затем непосредственно уполномоченное лицо осуществляет вручную движение движущегося элемента посредством манипулирования приводом подъемника в первом направлении движения и последующее движение вручную движущегося элемента в противоположном первому направлении движения - во втором направлении движения. При этом уполномоченное лицо обладает полным контролем над состоянием движения. Оно может в любое время сразу прекратить движение при определении неполадок.
Предпочтительно необходимые функции управления поделены между блоком управления лифтом и блоком управления тормозом. В частности, блок управления тормозом, предпочтительно содержащий также так называемый электронный ограничитель скорости или соединенный с ним, содержит, например, блок управления блокирующего устройства, устройство для шунтирования цепи безопасности тормоза и интерфейс для блока управления лифтом. Блок управления тормозом деактивирует блокирующее устройство аварийного тормоза в случае неисправности, например, при аварийной скорости и размыкает соответствующий элемент цепи безопасности подъемника. Но он деактивирует также, например, блокирующее устройство аварийного тормоза при длительном прекращении энергоснабжения или при наступлении других оцененных некритическими событий. Блок управления тормозом регистрирует эти случаи срабатывания как некритические в энергонезависимом запоминающем устройстве. Блок управления лифтом, содержащий все необходимые для управления подъемником элементы, в частности, в состоянии управлять приводом подъемника для движения движущихся элементов подъемника и взаимодействовать с блоком управления тормозом. После выключения всего подъемника, например, при отключении энергетической сети здания весь подъемник находится в обесточенном состоянии, а блок управления тормозом деактивирует согласно определению блокирующее устройство аварийного тормоза.
После повторного включения подачи электроэнергии к подъемнику блок управления лифтом фиксирует разрыв цепи безопасности в аварийном тормозе, вследствие чего блокируется начало движения подъемника. Блок управления тормозом проверяет собственный статус безопасности и определяет, с одной стороны, например, посредством функции самодиагностики, функциональность блока управления и, например, интегрированного электронного ограничителя скорости, а затем определяет, что причина отключения была некритической, так как соответствующие данные заложены в энергонезависимом запоминающем устройстве. Блок управления тормозом передает эту информацию в блок управления лифтом, инициирующий возврат в исходное положение аварийного тормоза. Блок управления лифтом проверяет статус остальной цепи безопасности и инициирует затем соответствующие шаги по возврату в исходное положение.
Представленный способ и соответствующее аварийное устройство делает возможным изготовление безопасного подъемного устройства с возможностью его функционирования с минимальными запасами энергии и повторно готовое к эксплуатации в короткие сроки, несмотря на особые события или после особых событий.
Разъясненные варианты выполнения и решения могут быть изменены и дополнены специалистом. Он подбирает предпочтительные для определенного устройства решения и объединяет их.
Далее приводится разъяснение примеров выполнения изобретения при помощи примеров и схематических вариантов выполнения.
На чертежах схематически показаны:
фиг. 1 - подъемное устройство, вид сбоку;
фиг. 2 - подъемное устройство в поперечном сечении;
фиг. 3 - блок-схема возврата в исходное положение аварийного тормоза;
фиг. 4 - блок-схема инициализации возврата в исходное положение;
фиг. 5 - блок-схема ручной инициализации возврата в исходное положение;
фиг. 6 - изображение электрически соединенной системы безопасности;
фиг. 7s - вид сбоку варианта выполнения аварийного тормоза в первом, не приведенном в действие положении;
фиг. 7f - вид спереди аварийного тормоза по фиг. 8s;
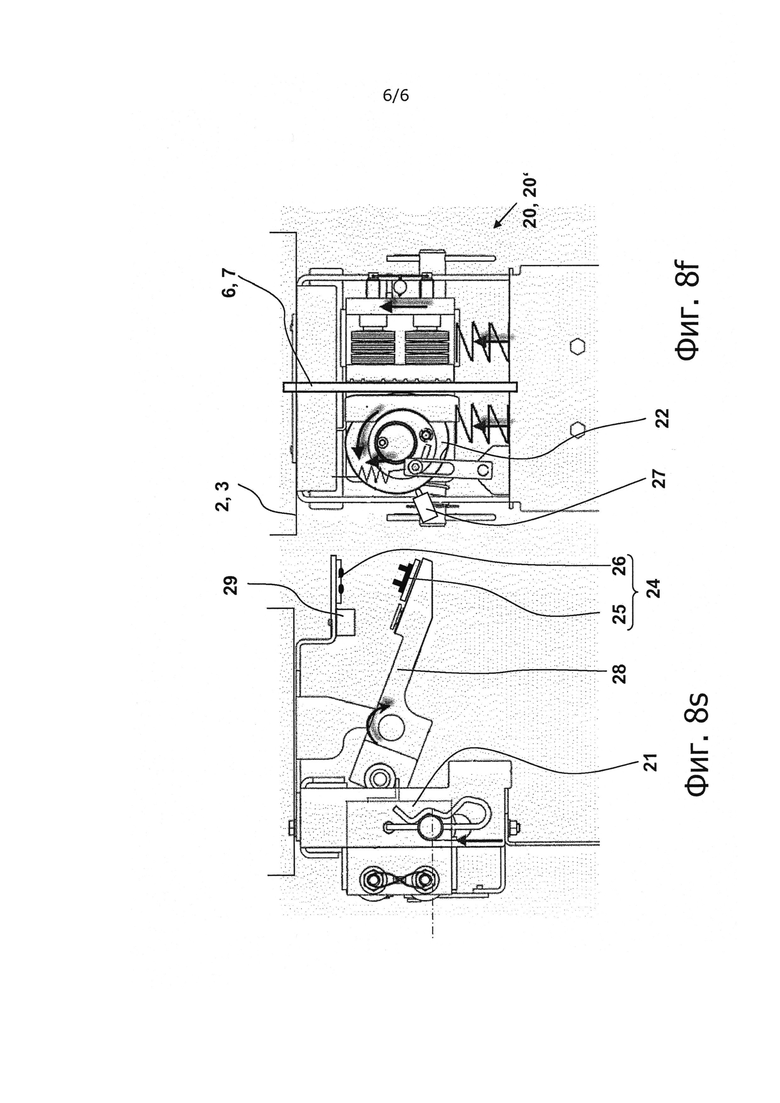
фиг. 8s - вид сбоку аварийного тормоза по фиг. 8s во втором, приведенном в действие положении;
фиг. 8f - вид спереди аварийного тормоза по фиг. 8s.
На всех фигурах одинаково функционирующие элементы имеют одинаковые ссылочные позиции.
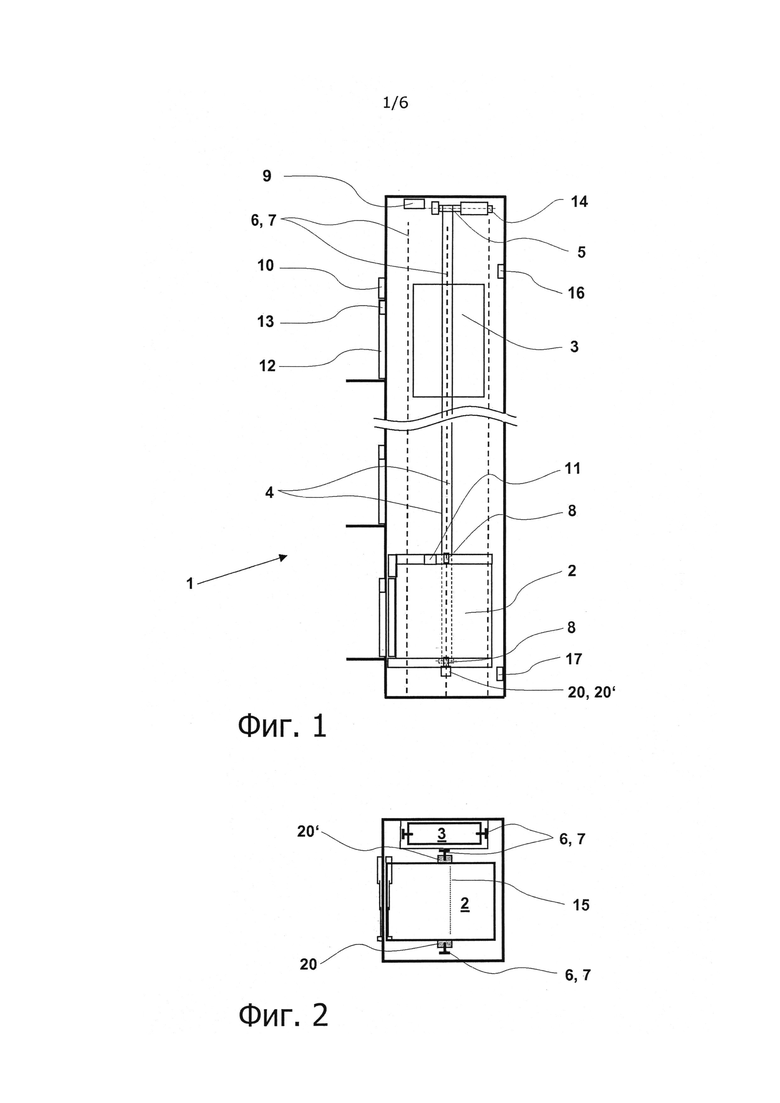
На фиг. 1 показан общий вид подъемного устройства 1. Подъемное устройство 1 установлено в здании и служит для транспортирования людей или грузов внутри здания. Подъемное устройство содержит кабину 2 лифта с возможностью ее перемещения вдоль направляющих рельсов 6 вверх и вниз. Кабина 2 лифта снабжена для этого направляющими башмаками 8, посредством которых кабина лифта направляется возможно точнее по заданному пути движения. Кабина 2 лифта доступна со стороны здания через двери 12 шахты лифта. Привод 5 служит для приведения в движение и фиксации кабины 2 лифта. Привод 5 расположен, например, в верхнем участке здания, а кабина 2 подвешена при помощи несущих средств 4, например, несущих тросов или несущих ремней на приводе 5. Несущие средства 4 проведены через привод 5 к противовесу 3. Противовес уравновешивает весовую долю кабины 2 лифта, так чтобы привод 5 мог уравновешивать главным образом только неравновесие между кабиной 2 и противовесом 3. Привод 5 расположен согласно примеру выполнения в верхней части здания. Он мог бы располагаться, само собой разумеется, также и в другом месте в здании или на участке кабины 2 или противовеса 3.
Подъемным устройством 1 управляет блок 10 управления лифтом. Блок 10 управления лифтом принимает запросы пользователя, оптимизирует процесс эксплуатации подъемного устройства и управляет приводом 5, как правило, посредством блока 9 управления приводом. Привод 5 оборудован кодером или инкрементальным датчиком 14. При помощи него можно регистрировать вращательное движение оси привода и передавать данные с целью регулировки привода в блок 9 управления приводом. Этот инкрементальный датчик 14 можно использовать также для учета пути перемещения кабины 2 лифта, а вместе с этим и для его регулировки и контроля. Кроме того, блок 10 управления лифтом контролирует состояние безопасности подъемного устройства и прекращает режим движения в случае небезопасного эксплуатационного состояния. Этот контроль осуществляется, как правило, при использовании цепи безопасности подъемника, в котором объединены все относящиеся к безопасности функции. К такому контролю, или к такой цепи безопасности подъемника, также подключены, например, контакты 13 дверей шахты лифта, контролирующие правильное закрытие дверей 12 шахты лифта и, например, контролирующие также пограничные положения движущихся элементов 2, 3 в шахте лифта посредством нижнего и верхнего концевых выключателей 16, 17.
Кабина 2 лифта, а в случае необходимости также противовес 3, оборудована, кроме того, тормозной системой, предназначенной для предохранения и/или замедления кабины 2 лифта при неожиданном движении или при аварийной скорости. Тормозная система содержит в примере два конструктивно идентичных аварийных тормоза 20, 20′, расположенных с двух сторон на движущихся элементах 2, 3. Аварийные тормоза 20, 20′ расположены в примере выполнения под кабиной 2 и ими управляют электрически через блок 11 управления тормозом. Этот блок 11 управления тормозом содержит предпочтительно также электронный ограничитель скорости или движений перемещения кабины 2 лифта, контролирующий движения перемещения. Поэтому может отсутствовать обычно используемый механический ограничитель скорости.
На фиг. 2 показано подъемное устройство согласно фиг. 1 на виде сверху. Тормозная система содержит два аварийных тормоза 20, 20′. Два аварийных тормоза 20, 20′ соединены в этом примере выполнения посредством синхронизирующего штока 15, поэтому оба аварийных тормоза 20, 20′ приводятся в действие друг с другом принудительно. Тем самым может быть предотвращено непреднамеренное торможение с одной стороны. Оба аварийных тормоза 20, 20′ предпочтительно конструктивно идентичны или выполнены зеркально симметрично, и они воздействуют на расположенные по обе стороны от кабины 2 тормозные рельсы 7. Тормозные рельсы 7 в примере выполнения идентичны направляющим рельсам 6.
От синхронизирующего штока 15 также можно отказаться. Разумеется, в этом случае рекомендуется использовать электрические средства синхронизации, обеспечивающие одновременное срабатывание расположенных с двух сторон кабины лифта аварийных тормозов 20, 20′.
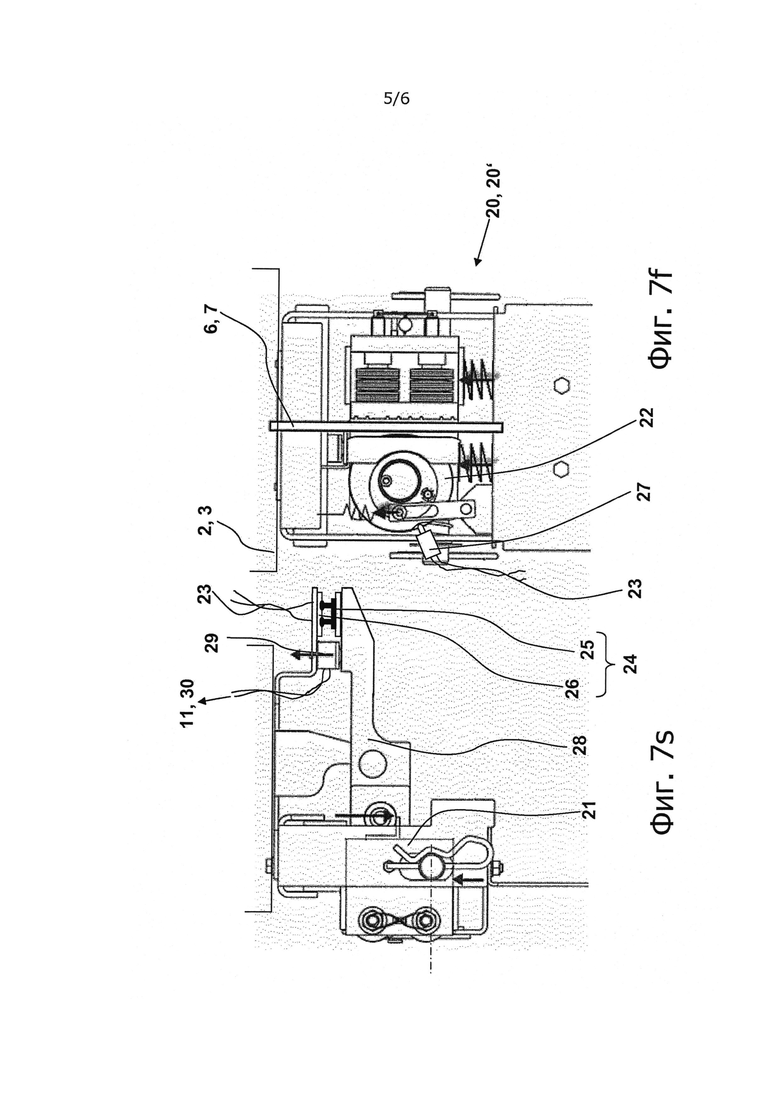
Далее на фиг. 7 и фиг. 8 показан и разъяснен возможный пример аварийного тормоза 20, 20′. Оба аварийных тормоза 20, 20′ функционально идентичны, поэтому далее говорится только об аварийном тормозе 20. Аварийный тормоз 20 имеет корпус 21 тормоза с тормозным механизмом 22. Корпус 21 тормоза фиксирован посредством блокирующего устройства 28 в исходном положении (фиг. 7s, фиг. 7f). Для этого блокирующее устройство 28 фиксировано посредством блокирующих электромагнитов 29. Это положение блокирующего устройства 28 контролируется первым контактом 24 тормоза. Первый контакт 24 тормоза содержит в примере выполнения контактную перемычку 25 и контактные площадки 26, подведенные к цепи 23 безопасности тормоза. Альтернативно или в качестве дополнения исходное положение аварийного тормоза 20 может контролироваться также посредством второго контакта 27 тормоза. Этот второй контакт 27 тормоза контролирует тормозной механизм 22, а также этот второй контакт 27 тормоза в примере выполнения соединен во всяком случае последовательно с первым контактом 24 тормоза, цепью 23 безопасности тормоза. Блокирующий электромагнит 29 соединен с блоком 11 управления тормозом и с соответствующим источником 30 электроэнергии и управляется блоком 11 управления тормозом.
Как только блок 11 управления тормозом деактивирует блокирующий электромагнит 29 (фиг. 8s, 8f), аварийный тормоз 20 перемещается в свое положение торможения, причем тормозной механизм 22 приводится в контакт с тормозным рельсом или направляющим рельсом 6, 7. Продолжающееся движение кабины лифта относительно тормозного рельса или направляющего рельса 6, 7 приводит к дальнейшему сцеплению аварийного тормоза 20 и, в конце концов, к надежному торможению кабины 2 лифта. При деактивации блокирующего электромагнита 29 или блокировочного устройства 28 разрывается первый контакт 24 тормоза, при движении корпуса 21 тормоза и тормозного механизма 22 также разрывается опциональный второй контакт 27 тормоза и цепь 23 безопасности тормоза, вследствие чего эксплуатация подъемного устройства 1 прекращается.
На фиг. 6 показана возможная электросхема электрически связанной тормозной системы. Контакты 24, 27 тормоза обоих аварийных тормозов 20, 20′ последовательно подключены в примере выполнения и подведены как цепь 23 безопасности тормоза к блоку 11 управления тормозом. В блоке 11 управления тормозом оценивается состояние цепи 23 безопасности тормоза и объединяется с цепью 19 безопасности подъемника. Блок 11 управления тормозом содержит электронный ограничитель 18 скорости, контролирующий, с одной стороны, режим движения и общее состояние подъемного устройства. Блокирующие электромагниты 29 обоих аварийных тормозов 20, 20′ также подключены в примере выполнения последовательно и подведены к блоку 11 управления тормозом, откуда блокирующие электромагниты 29 могут управляться и питаться электроэнергией от источника 30 электроэнергии. Благодаря последовательному включению при разрыве электрической линии принудительно деактивируются оба, или все блокирующие электромагниты 29 аварийных тормозов 20. Последовательное включение предпочтительно выполнено в блоке 11 управления тормозом. То есть блокирующие электромагниты 29 обоих аварийных тормозов 20, 20′ подсоединяются к блоку управления тормозом отдельно, а последовательное включение выполнено в блоке 11 управления тормозом.
В этом случае электронный ограничитель 18 скорости может при необходимости разрывать как цепь 19 безопасности подъемника, так и блокировочную электрическую цепь блокирующих электромагнитов 29, вследствие чего аварийный тормоз 20 отпускается для торможения.
Если ограничитель 18 скорости в первом случае фиксирует, например, слишком высокую скорость движения, то он разрывает блокировочную электрическую цепь блокирующих электромагнитов 29, вследствие чего кабина 2 лифта тормозится. Одновременно он разрывает при разрыве первого прерывателя 31 цепь 19 безопасности подъемника, после чего блок 10 управления лифтом притормаживает и останавливает привод 5 подъемного устройства. Ограничитель 18 скорости регистрирует причину приведения в действие как релевантную или критическую и создает соответствующий сигнал S1 состояния неисправности в энергонезависимом запоминающем устройстве.
Если ограничитель 18 скорости фиксирует в другом случае, что цепь 23 безопасности тормоза разорвалась, например, без видимой причины, то он разрывает блокировочную электрическую цепь блокирующих электромагнитов 29 и цепь 19 безопасности подъемника 19 и останавливает вследствие этого подъемное устройство. Тем самым при ошибочном срабатывании одного из аварийных тормозов 20, 20 сразу же приводится в действие и второй аварийный тормоз 20′, 20. Вследствие этого предотвращается одностороннее притормаживание. Ограничитель 18 скорости регистрирует причину приведения в действие как существенную или критическую и создает соответствующий сигнал S1 состояния неисправности в энергонезависимом запоминающем устройстве.
Если в следующем случае ограничитель 18 скорости фиксирует, что, например, стоящее подъемное устройство простаивает или простояло довольно длительное время, то он также разрывает блокировочную электрическую цепь блокирующих электромагнитов 29, хотя релевантная неполадка в подъемном устройстве отсутствует. Вследствие этого блокирующее устройство 28 отпускается и аварийный тормоз 20 перемещается в положение торможения, не производя, однако, торможение, так как кабина лифта стоит, а вследствие этого аварийный тормоз 20 дальше не затягивается. Ограничитель 18 скорости регистрирует причину приведения в действие как не существенную, или как некритическую и создает соответствующий сигнал S1 состояния неисправности в энергонезависимом запоминающем устройстве.
Кроме того, электронный ограничитель 18 скорости может, при соответствующем запросе шунтировать цепь 23 безопасности тормоза при помощи мостящего контакта 32 для возможного в случае необходимости контролируемого движения кабины 2 лифта.
В этом описанном последнем случае аварийный тормоз 20 подан, соответственно, в исходное положение торможения, а блокирующее устройство 28 деактивировано. В соответствии с этим цепь 23 безопасности тормоза разорвана, а также, естественно, разорвана цепь 19 безопасности подъемника, с одной стороны, цепью 23 безопасности тормоза, но также разрывом первого прерывателя 31.
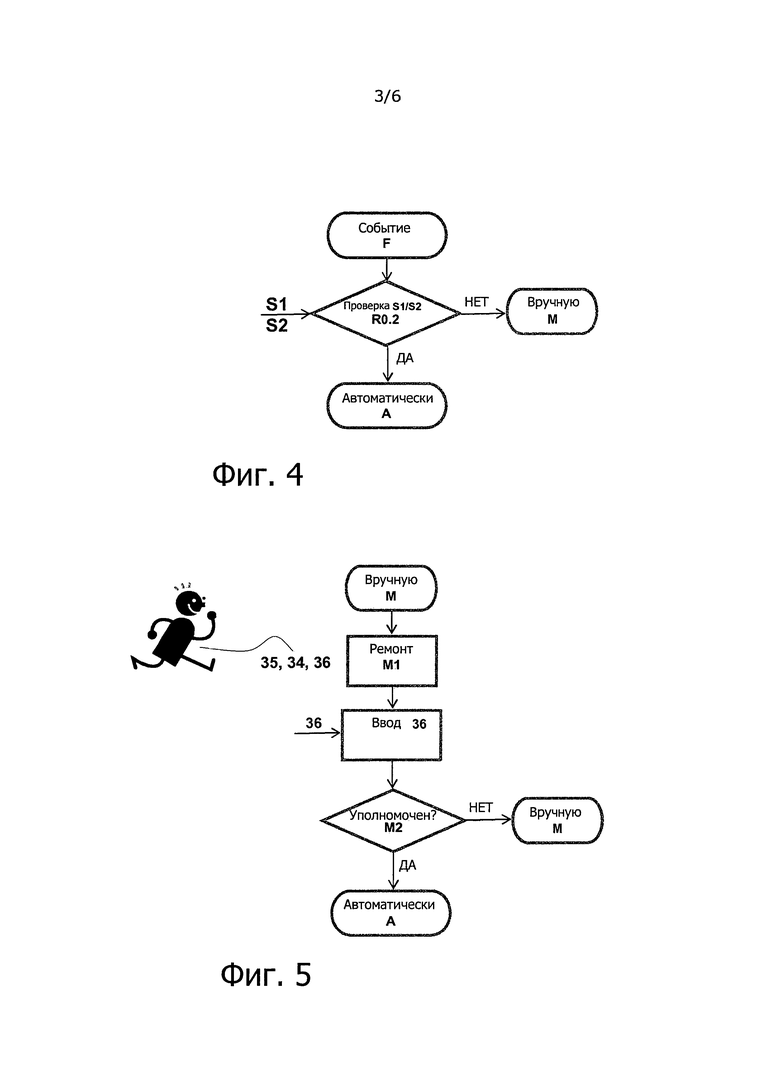
Если в этом случае энергоснабжение здания или подъемного устройства включается снова, блок 10 управления лифтом фиксирует после того, как проведены всевозможные программы самодиагностики и приведения в исходное положение, что цепь 19 безопасности подъемника, прежде всего на участке системы безопасности кабины, разорвана. Затем блок управления лифтом запускает, как это изображено на фиг. 4, программу анализа F событий. Одновременно с включением подачи электроэнергии, блок 11 управления тормозом также реализует всевозможные программы самодиагностики и приведения в исходное положение и определяет согласно зарегистрированному сигналу S1 состояния неисправности причину приведения в действие, как не существенную, или некритическую и, что само функционирование управления S2 тормозом оценивается исправным. Блок управления лифтом запрашивает в программе F анализа событий сигнал S1 состояния неисправности и сообщение S2 о готовности функционирования S2 и, исходя из этого, определяет дальнейший характер действий. При передаче сигналом S1 сообщения "некритичности", а сигналом S2 - сообщения «проверка работоспособности состоялась»", блок 10 управления лифтом запускает, если остальные элементы цепи 19 безопасности подъемника в порядке, автоматический возврат A в исходное положение, которое более подробно разъясняется далее на фиг. 3. В противном случае дальнейшая эксплуатация подъемного устройства прекращается до тех пор, пока не произойдет ручной возврат М в состояние готовности, как это подробнее разъяснено далее со ссылкой на фиг. 5.
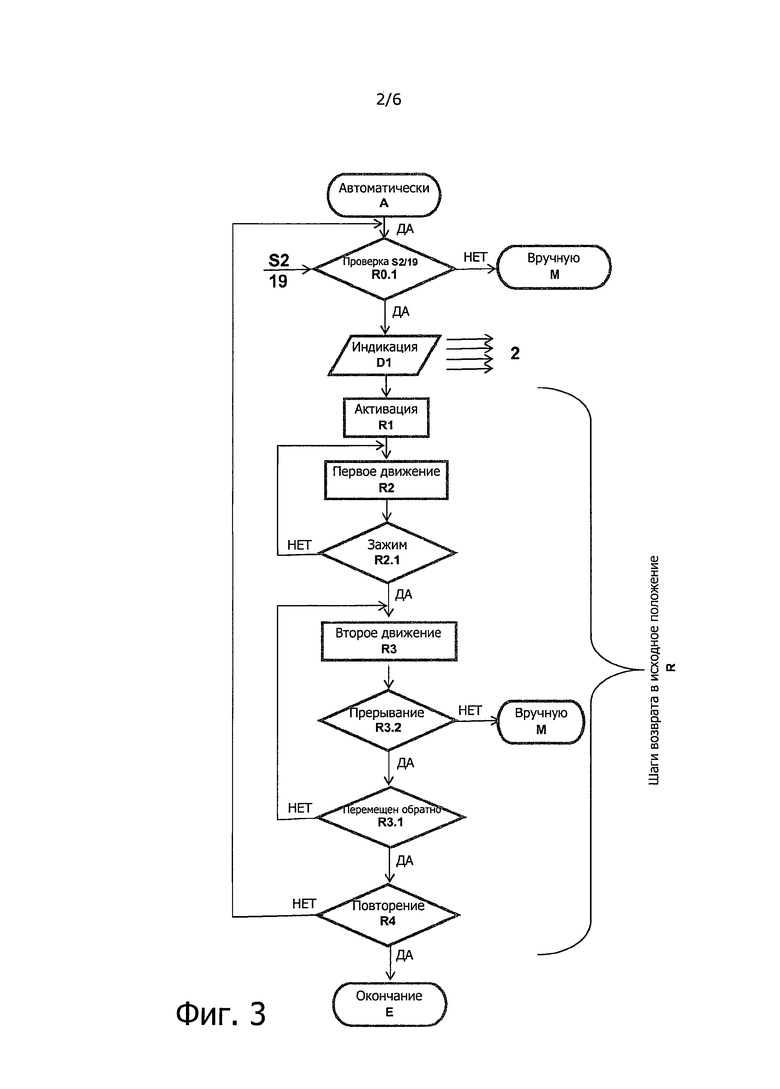
После старта автоматического возврата A в состояние готовности (фиг. 3) в примере выполнения осуществляется проверка R0.1 способности S2 функционирования блока 11 управления тормозом, а также остальных элементов цепи 19 безопасности подъемника и при положительном результате «да» выдается, например, опциональная индикация D2 или объявление на участке этажей или в кабине 2, указывающая, что вскоре будет осуществлено возвратное движение. Затем блок 11 управления тормозом замыкает, после соответствующей команды блока 10 управления лифтом, первый прерыватель 31 цепи 19 безопасности подъемника и шунтирует временно цепь 23 безопасности тормоза. В то же время осуществляется активация (R1) блокирующего устройства 28 аварийного тормоза, в то время как второй прерыватель 33 блокирующего устройства замыкается и подается ток на блокирующий электромагнит 29 для подготовки блокирующего устройства 28 для фиксации аварийного тормоза 20 в положении готовности.
Затем блок 10 управления лифтом дает соответствующие команды на движение (R2) кабины 2 или выборочно противовеса 3 в первом направлении движения с предпочтительно низкой скоростью. Вследствие этого аварийный тормоз, который был перед движением только приставлен к рельсам 6, 7, однако, по существу, не затянут, по меньшей мере, частично затягивается или подтягивается. Это движение в первом направлении движения выполняется предпочтительно до тех пор, пока аварийный тормоз не будет, по меньшей мере, частично зажат (R2.1) на предусмотренной для торможения рабочей тормозной поверхности тормозного или направляющего рельса. Произошедший зажим R2.1 можно, например, установить, определяя путь перемещения движущегося элемента, во всяком случае, посредством сигналов инкрементального датчика 14, и сравнивая его с заданным значением пути. Альтернативно или в качестве дополнения также можно устанавливать движущий момент приводного двигателя предпочтительно посредством измерения тока привода и сравнивать его с заданным моментом или можно также просто устанавливать продолжительность движения движущегося элемента в первом направлении движения и сравнивать ее с предельным значением времени.
Вслед за первым движением R2 в первом направлении движения блок 10 управления лифтом задает изменение направления движения, а привод 5 перемещает в соответствии с этим кабину лифта или противовес в противоположном втором направлении R3 движения.
При движении R2 в первом направлении аварийный тормоз прижат к рельсу. В отдельных случаях, в зависимости от конструктивного типа аварийного тормоза 20, блокирующее устройство 28 также может приводиться вследствие этого уже в положение фиксации. Аварийный тормоз перемещается обратно в собственное положение эксплуатации при втором движении R3. Это второе движение R3 во втором направлении движения продолжается, по существу, до тех пор, пока аварийный тормоз не будет перемещен R3.1 обратно. Это состояние можно, как правило, просто определить, проверяя, например, замкнута ли цепь 23 безопасности тормоза, в частности, находится ли аварийный тормоз 20 в исходном положении, или измеряя участок движения или, в качестве особенно надежной возможности, измеряя движущий момент приводного двигателя. Как только движущий момент достигает индикаторной величины, соответствующей, как правило, постоянному моменту движения пустой кабины, аварийный тормоз 20 освобождается, в частности, он больше не зажат.
В качестве примера, в процессе, представленном на фиг. 3, прежде всего, контролируется движение во втором направлении движения, при прерывании R3.2 каждого перемещения, если распознано небезопасное состояние подъемного устройства. Этот контроль считается предпочтительным во время каждого перемещения. Так, в частности, перемещение прекращается, если, например, движущий момент приводного двигателя достигает максимального предельного значения, если движущий момент приводного двигателя превосходит рабочее предельное значение во время ограничения по времени, если достигнута предельная продолжительность времени, если пройдены пограничные положения движущегося элемента в шахте лифта или, если цепь 19 безопасности подъемника определяет другое небезопасное состояние. В этих случаях, как правило, инициируется или запрашивается ручной возврат М в исходное положение.
В частности, существенные этапы возврата R в исходное положение аварийного тормоза 20 содержат активацию R1 блокирующего устройства аварийного тормоза для подготовки его к фиксации аварийного тормоза в положении готовности, движение движущегося элемента в первом направлении R2 движения для, по меньшей мере, частичного затягивания аварийного тормоза, или подтягивания его и приведения в движение движущегося элемента в противоположное первому направлению движения второе направление R3 движения для приведения аварийного тормоза в положение готовности, в котором он фиксирован активированным блокирующим устройством. В отдельных случаях в примере выполнения согласно фиг. 3 шаги R возврата в исходное положение повторяются R4 выборочно, если после произошедшего окончания движения движущегося элемента во втором направлении движения цепь безопасности тормоза по-прежнему не замкнута, хотя в подъемном устройстве неисправность не была установлена. Поскольку для аварийных тормозов требуется исключительно высокая возвратная энергия, или усилие, возможно, что первого старта будет не достаточно.
Как уже указывалось, установление небезопасного состояния или отклонения от ожидаемых характеристик приводит к прерыванию или к не состоявшемуся автоматическому возврату A в исходное положение. В этих случаях должен происходить ручной возврат M в исходное положение, как это схематически изображено на чертеже на фиг. 5. Для этого вызывают уполномоченное лицо 35. Этот запрос происходит по известным сервисным каналам, либо поступает по электронике от блока управления лифтом, либо, например, по телефону от пострадавших людей. Уполномоченное лицо проводит на первом этапе необходимую специальную диагностику подъемного устройства и инициирует различные ремонтные работы M1. При наличии, по меньшей мере, первичных функций и надежности подъемного устройства, уполномоченное лицо осуществляет, например, шаги R возврата в исходное положение ручным управлением. Он включает блокировочную электрическую цепь блокировочного устройства 28 и шунтирует, во всяком случае, цепь 23 безопасности тормоза. Затем он перемещает кабину лифта, например, применяя так называемый ремонтный блок управления, в первом направлении движения, до тех пор, пока он не определит небольшое сопротивление зажима. Затем он перемещает кабину лифта обратно, против первого направления движения, до тех пор, пока кабина лифта не будет перемещаться свободно. Затем он производит, само собой разумеется, соответствующие конечные проверки подъемного устройства, прежде чем он снова разрешит пользоваться подъемным устройством.
Альтернативно уполномоченное лицо 35 запускает возврат в исходное положение введением кода 36 доступа в блок управления лифтом. Код 36 доступа сигнализирует блоку 10 управления лифтом, что лицо 35 действительно уполномочено задавать соответствующую последовательность команд. Код 36 доступа может соответствовать, например, части идентификационного номера блока управления тормозом. Альтернативно может осуществляться также согласованный командно-операционный цикл. Например, это может быть команда, осуществляемая посредством кнопок управления блока управления лифтом, с последующей командой сброса блока управления лифтом в пределах промежутка времени, например, десяти секунд. Эти проверки полномочия предотвращают вероятные ошибочные манипуляции.
Альтернативно код 36 доступа содержит предпочтительно личный ключ 34, соединяемый с блоком 11 управления тормозом или блоком 10 управления лифтом. Ключ может быть механическим ключом, при помощи которого предоставляется доступ к определенным функциям подъемника. Им может быть также электронный ключ, электронная карта, и т.д. дающая возможность доступа к определенным функциям подъемника. При применении ключа 34 можно идентифицировать его носителя.
После введения кода 36 доступа блок 11 управления тормозом или блок 10 управления лифтом проверяет полномочие M3 и инициирует при положительной проверке автоматический возврат A в исходное положение, как это описано ранее. При этом в любом случае отрицательный результат проверки снова приводит также к прерыванию цикла автоматического возврата в исходное положение.
Описанные примеры выполнения и процессы могут изменяться специалистом. Сочетанием отдельных функций для блока 10 управления лифтом или блока 11 управления тормозом можно переставлять или объединять все функции в один блок управления. Проверка M3 полномочия может применяться также для других этапов технического обслуживания подъемника, например, для полномочия проведения тестовых мероприятий в блоке 11 управления тормозом или в аварийных тормозах 20.

Подъемное устройство содержит кабину лифта с возможностью ее перемещения вдоль направляющих рельсов. Кабина лифта оснащена тормозной системой, предпочтительно с двумя аварийными тормозами. Защитное устройство управляется посредством блоков управления, которые могут приводить в действие защитное устройство при критических или некритических событиях. Кроме того, блоки управления содержат функцию для автоматического возврата (A) в исходное положение аварийного тормоза, если оцененное как некритическое событие является причиной приведения в действие аварийного тормоза. Возврат в исходное положение аварийного тормоза осуществляют посредством способа, содержащего заданные шаги (R) возврата в исходное положение. Изобретения обеспечивают повышение безопасности подъемного устройства в любое время. 2 н. и 17 з.п. ф-лы, 10 ил. 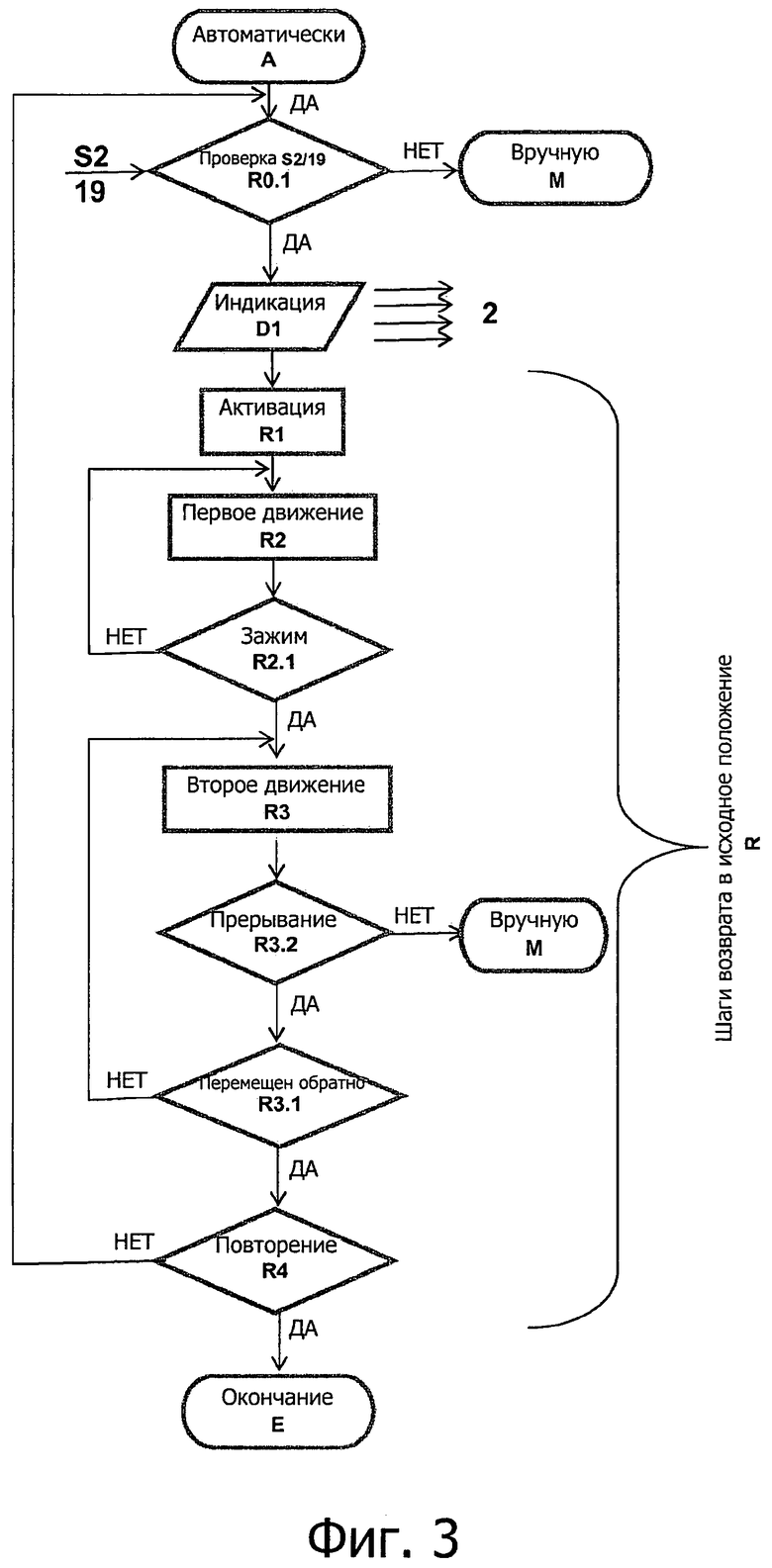
1. Способ возврата в исходное положение отпущенного для торможения аварийного тормоза (20, 20′) движущегося элемента (2, 3) подъемного устройства (1) с предпочтительно электромеханическим блокирующим устройством (28), отпускающем в деактивированном состоянии аварийный тормоз (20, 20′) для торможения, в котором осуществляют, по меньшей мере, следующие шаги (R) возврата в исходное положение:
- активация (R1) блокирующего устройства (28) аварийного тормоза (20, 20′) для подготовки его фиксации в положении готовности;
- движение (R2) движущегося элемента (2, 3) в первом направлении движения для, по меньшей мере, частичного затягивания или подтягивания аварийного тормоза (20, 20′) и
- движение (R3) движущегося элемента (2, 3) в противоположном первому направлению движения втором направлении движения для приведения аварийного тормоза (20, 20′) в положение готовности, в котором его фиксируют посредством активированного блокирующего устройства (28),
причем блокирующее устройство (28) активируют перед движением движущегося элемента во втором направлении движения.
2. Способ по п. 1, в котором в качестве первого направления движения используют направление движения вниз, а в качестве второго направления движения соответственно используют направление движения вверх.
3. Способ по п. 1 или 2, в котором блокирующее устройство (28) активируют перед движением движущегося элемента (2, 3) в первом направлении движения.
4. Способ по п. 3, в котором движение движущегося элемента (2, 3) в первом направлении движения выполняют до тех пор, пока аварийный тормоз (20, 20′) не будет зажат (R2.1), по меньшей мере, частично на предназначенной для торможения рабочей тормозной поверхности тормозного или направляющего рельса (6, 7).
5. Способ по п. 4, в котором осуществленный, по меньшей мере, частичный зажим (R2.1) аварийного тормоза (20, 20′) на предусмотренной для торможения рабочей тормозной поверхности определяют,
- устанавливая путь перемещения движущегося элемента (2, 3) предпочтительно посредством измерения вращательного движения ведущего шкива и сравнивая его с заданным значением пути и/или
- устанавливая движущий момент приводного двигателя (5) предпочтительно посредством измерения тока привода и сравнивая его с заданным моментом, или
- устанавливая длительность движения движущегося элемента (2, 3) в первом направлении движения и сравнивая ее с предельным значением времени.
6. Способ по п. 3, в котором движение движущегося элемента (2, 3) во втором направлении выполняют до тех пор, пока аварийный тормоз не будет возвращен (R3.1) в исходное положение, причем это определяют, если цепь (23) безопасности тормоза замкнута, и
- движущий элемент (2, 3) прошел заданный отрезок пути и/или
- движущий момент приводного двигателя (5) достиг индикаторной величины.
7. Способ по п. 4 или 5, в котором движение движущегося элемента (2, 3) во втором направлении выполняют до тех пор, пока аварийный тормоз не будет возвращен (R3.1) в исходное положение, причем это определяют, если цепь (23) безопасности тормоза замкнута, и
- движущий элемент (2, 3) прошел заданный отрезок пути и/или
- движущий момент приводного двигателя (5) достиг индикаторной величины.
8. Способ по п. 6, в котором движение движущегося элемента (2, 3) во втором направлении прерывают (R3.2), если
- движущий момент приводного двигателя (5) достигнет максимального предельного значения, или
- движущий момент приводного двигателя (5) превысит параметры предельной величины во время заранее определенного ограничения по времени, или
- достигнута предельная продолжительность ограничения по времени, или
- движущийся элемент (2, 3) проехал в шахте лифта пограничные положения, или
- цепь (19) безопасности подъемного устройства обнаружила небезопасное состояние.
9. Способ по п. 1, в котором движение движущегося элемента (2, 3) во втором направлении прерывают (R3.2), если
- движущий момент приводного двигателя (5) достигнет максимального предельного значения, или
- движущий момент приводного двигателя (5) превысит параметры предельной величины во время заранее определенного ограничения по времени, или
- достигнута предельная продолжительность ограничения по времени, или
- движущийся элемент (2, 3) проехал в шахте лифта пограничные положения, или
- цепь (19) безопасности подъемного устройства обнаружила небезопасное состояние.
10. Способ по п. 9, в котором шаги (R) возврата в исходное положение избирательно повторяют, если после произошедшего окончания движения движущегося элемента во втором направлении движения цепь (23) безопасности тормоза не замкнута.
11. Способ по п. 1, в котором положение готовности аварийного тормоза (20, 20′) контролируют, а цепь (23) безопасности тормоза подъемного устройства замыкают, если аварийный тормоз (20, 20′) в своем положении готовности и блокирующее устройство (28) активированы и цепь (23) безопасности тормоза подъемного устройства разрывают, если аварийный тормоз (20, 20′) или блокирующее устройство (28) не находятся в своем положении готовности.
12. Способ по п. 10, в котором положение готовности аварийного тормоза (20, 20′) контролируют, а цепь (23) безопасности тормоза подъемного устройства замыкают, если аварийный тормоз (20, 20′) в своем положении готовности и блокирующее устройство (28) активированы и цепь (23) безопасности тормоза подъемного устройства разрывают, если аварийный тормоз (20, 20′) или блокирующее устройство (28) не находятся в своем положении готовности.
13. Способ по п. 1, в котором перед движением движущегося элемента (2, 3) в первом направлении движения проверяют (R0.1) цепь (19) безопасности подъемника, а движение в первом направлении движения выполняют только тогда, когда заданные элементы цепи (19) безопасности подъемника считаются исправными, причем заданные элементы цепи (19) безопасности подъемника предпочтительно за исключением цепи (23) безопасности тормоза содержат все остальные элементы цепи (19) безопасности подъемника.
14. Способ по п. 12, в котором перед движением движущегося элемента (2, 3) в первом направлении движения проверяют (R0.1) цепь (19) безопасности подъемника, а движение в первом направлении движения выполняют только тогда, когда заданные элементы цепи (19) безопасности подъемника считаются исправными, причем заданные элементы цепи (19) безопасности подъемника предпочтительно за исключением цепи (23) безопасности тормоза содержат все остальные элементы цепи (19) безопасности подъемника.
15. Способ по п. 1, в котором
- шаги (R) возврата в исходное положение инициируют автоматически, если блокировочное устройство (28) деактивировано вследствие события, оцененного некритическим, если имеется сообщение (S2) готовности функционирования блока (11) управления тормоза, а цепь (19) безопасности подъемника определила подъемник безопасным и
- шаги (R) возврата в исходное положение инициируются вручную, если блокировочное устройство (28) деактивировано вследствие события, оцененного некритическим, отсутствует сообщение (S2) готовности функционирования блока (11) управления тормоза, или цепь (19) безопасности подъемника не определила подъемник безопасным, причем сообщение (S2) готовности функционирования блока (11) управления тормоза запрашивают при первом шаге (R0.2) перед осуществлением шагов (R) возврата в исходное положение.
16. Способ по п. 14, в котором
- шаги (R) возврата в исходное положение инициируют автоматически, если блокировочное устройство (28) деактивировано вследствие события, оцененного некритическим, если имеется сообщение (S2) готовности функционирования блока (11) управления тормоза, а цепь (19) безопасности подъемника определила подъемник безопасным и
- шаги (R) возврата в исходное положение инициируются вручную, если блокировочное устройство (28) деактивировано вследствие события, оцененного некритическим, отсутствует сообщение (S2) готовности функционирования блока (11) управления тормоза, или цепь (19) безопасности подъемника не определила подъемник безопасным, причем сообщение (S2) готовности функционирования блока (11) управления тормоза запрашивают при первом шаге (R0.2) перед осуществлением шагов (R) возврата в исходное положение.
17. Способ по п. 15, в котором ручное инициирование (М) шагов (R) возврата в исходное положение выполняет уполномоченное лицо (35), полномочия которого проверяют (M2) посредством:
- введения кода (36) доступа в блок (11) управления тормоза или в блок (10) управления лифта, причем этот код (36) доступа, например, соответствует части идентификационного номера блока управления тормоза, или
- выполнения заданного цикла команд и действий, или
- соединения с блоком управления тормозом или с блоком управления лифтом персонального ключа.
18. Способ по п. 15 или 17, в котором ручное инициирование шагов возврата в исходное положение содержит:
- ручное квитирование статуса блока управления тормозом и
- следующее за этим перемещение вручную движущегося элемента в первом направлении движения и
- последующее перемещение движущегося элемента вручную в противоположном первому направлению движения - во втором направлении движения,
причем перемещение вручную осуществляют посредством манипулирования приводом подъемника.
19. Защитное устройство в подъемном устройстве, содержащее:
- аварийный тормоз (20, 20′) с электромеханическим блокирующим устройством (28), отпускающим аварийный тормоз (20, 20′) в деактивированном состоянии для торможения,
- блок (10) управления лифтом, инициирующий автоматический возврат (A) в исходное положение аварийного тормоза, если аварийный тормоз (20, 20′) отпущен вследствие оцененного, как некритическое событие, причем автоматический возврат (A) в исходное положение содержит обратное перемещение освобожденного для торможения аварийного тормоза, а это обратное перемещение осуществляется согласно любому из пп. 1-18 способа.
| US 2011226560 A1, 22.09.2011 | |||
| US2008128218 A1, 05.06.2008 | |||
| EP1930282 A1, 11.06.2008 | |||
| Способ контроля качества покрытия трубопровода | 1989 |
|
SU1733992A1 |
| ТОРМОЗНОЕ ИЛИ ЛОВИЛЬНОЕ УСТРОЙСТВО ДЛЯ КАБИНЫ ЛИФТА | 2006 |
|
RU2389677C2 |

