Область техники, к которой относится изобретение
Настоящее изобретение относится к области систем электропитания и, в частности, касается способа синхронизации, используемого для дифференциально-токовой защиты.
Уровень техники
Синхронизация данных очень важна для применений в системе электропитания, особенно для дифференциально-токовой защиты. Некоторые внешние синхронизационные механизмы, такие как эхо-метод или глобальная навигационная система (GPS), широко используются на практике в системах защиты для обеспечения синхронизации данных. Однако надежность эхо-метода зависит от симметрии каналов связи, а на практике они не всегда симметричны. А сигнал системы GPS не всегда достаточно надежен. Это оказывает сильное влияние на надежность дифференциально-токовой защиты и в некоторых условиях может вызывать ее ложное срабатывание.
Основной проблемой имеющегося эхо-метода является то, что он сильно зависит от симметричности каналов. Наряду с разработкой и совершенствованием современных высокопроизводительных сетей связи, наблюдается рост количества самовосстанавливающихся кольцевых сетей или волоконно-оптических каналов с варьируемой маршрутизацией. Это приводит к новым проблемам с дифференциально-токовой защитой линий передачи на основе волоконно-оптических каналов связи. Существующий способ синхронизации предполагает, что временная задержка как в приемном, так и в передающем каналах одинакова. Таким образом, при асимметричном переключении канала задержки в передающем и приемном каналах более не равны, и поэтому надежность защитных устройств падает из-за отсутствия синхронизма данных.
Основной проблемой синхронизации с использованием GPS является то, что сигнал навигационной системы и само навигационное устройство недостаточно надежны, чтобы соответствовать требованиям системы защиты на практике, несмотря на то, что глобальная навигационная система теоретически может обеспечивать точное, абсолютное и синхронизованное время для всех подстанций.
Для преодоления недостатков существующих внешних способов синхронизации (эхо-метода и способа с использованием GPS) в некоторых патентах, таких как CN 101651324 A, JP 8037724 A, JP 2008125251 и JP 2007068325, раскрыты способы, основанные на нагрузочном токе вместо внешнего механизма синхронизации. Хотя эти патенты имеют различные конкретные варианты осуществления, их основной принцип может быть описан следующим образом.
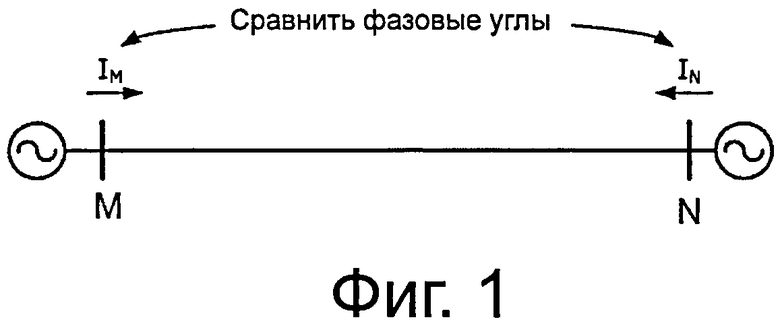
Ссылаясь на Фиг.1, способы в вышеупомянутых патентах основаны на том факте, что измеренные вектора нагрузочных токов на двух полюсах в нормальных рабочих условиях должны быть одинаковыми (той же амплитуды и противоположной фазы). Если текущая разность фаз, измеренная на двух полюсах, не равна 180°, это означает, что синхронизация нарушена и разница фаз, отличающаяся от 180°, может быть использована для синхронизации измерений. Данный принцип может быть также применен путем сравнения волнового сдвига двух волн нагрузочного тока.
Данный способ основан на измерении токов вместо эхо-сигналов или сигналов глобальной навигационной системы. Поэтому на него в принципе не влияют асимметрия каналов и надежность приема сигналов глобальной навигационной системы. Однако фазовый угол нагрузочных токов при небольшой или нулевой нагрузке не может быть измерен точно. Поэтому способ синхронизации, основанный на нагрузочном токе, не применим при небольших или нулевых нагрузках.
Другим недостатком данного способа является то, что он применим только для двухполюсной линии передачи и не может синхронизировать измерения в линиях передачи с более чем двумя полюсами.
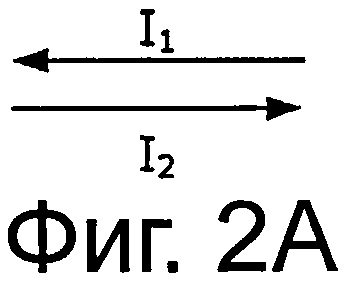
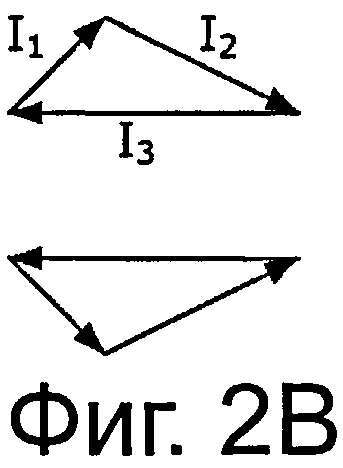
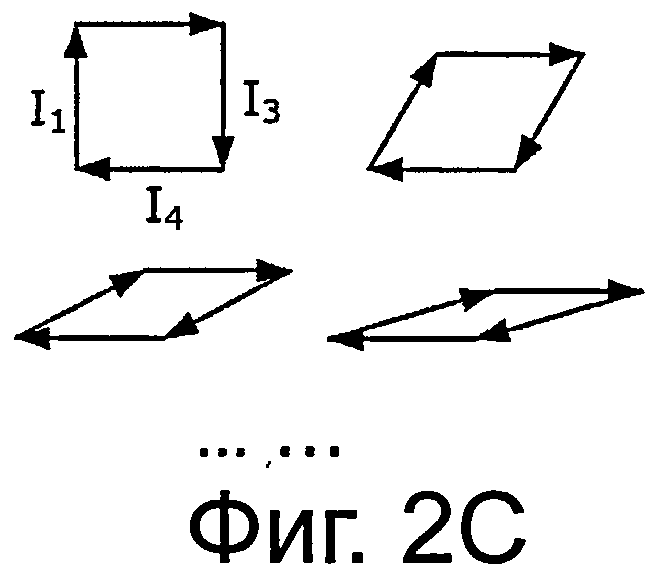
Как показано на Фиг.2, для двухполюсной системы ввиду того, что фазовые углы двух векторов нагрузочных токов должны быть противоположны друг другу, имеется только один выбор при определении разности фаз между двумя токами. Поэтому для двухполюсной системы может быть выполнена точная синхронизация. Но для трехполюсной системы имеется выбор из двух относительных разностей фаз между тремя векторами токов. А для четырехполюсной системы или системы с большим количеством полюсов имеется бесконечное количество выборов фазовых углов. Поэтому правильная относительная разность фаз среди этих векторов не может быть определена. Это означает, что измерения для линии передачи с более чем двумя полюсами не могут быть синхронизованы с помощью способа синхронизации, основанного на нагрузочном токе.
И, кроме того, указанные патенты, основанные на нагрузочных токах, не рассматривали проблему синхронизации при ошибке более чем половина периода колебаний переменного тока. Из-за того, что нагрузочный ток представляет собой периодическую волну, если ошибка синхронизации превышает половину периода, то способ синхронизации не может определить, в каком направлении надо исправлять ошибку.
Обобщая вышеизложенное, для всех способов, предложенных в вышеупомянутых патентах, несмотря на то, что существующие способы синхронизации, основанные на нагрузочных токах, не подвержены влиянию асимметрии каналов, они не могут применяться при небольших или нулевых нагрузках, не могут применяться для линий передачи с более чем двумя полюсами и не могут применяться при ошибке синхронизации, большей, чем половина периода.
В нашей предыдущей патентной заявке PCT/CN 009/076347 раскрыт способ и устройство для обнаружения асимметрии задержки канала связи между устройствами защиты линии передачи. Способ включает в себя: повторяемое вычисление несовпадения синхронизирующих импульсов, вырабатываемых генераторами синхроимпульсов устройств защиты, и задержек связи в различных путях канала связи; сравнение последнего вычисленного несовпадения синхронизирующих импульсов и задержек связи с предыдущими вычисленными несовпадениями синхронизирующих импульсов и задержек связи соответственно; принятие решения, что произошло переключение канала, если вычисленное несовпадение синхронизирующих импульсов превышает первый порог или изменение вычисленной задержки связи для какого-нибудь пути превышает второй порог; и принятие решения, что задержки канала являются асимметричными, если разность между вычисленными задержками связи различных путей после переключения каналов превышает третий порог. Усовершенствованный эхо-метод основан на характерных особенностях эхо-метода и локальных тактовых генераторов вместо измерений. Поэтому он может применяться для случая проблем с асимметричным переключением каналов, включая в себя случаи, когда ошибка синхронизации превышает половину периода. Однако усовершенствованный эхо-метод может столкнуться с проблемой накопления ошибки, если происходит множественное переключение каналов.
Раскрытие изобретения
С целью устранения вышеупомянутых недостатков настоящее изобретение предлагает способ синхронизации для дифференциально-токовой защиты.
Способ синхронизации для дифференциально-токовой защиты в соответствии с настоящим изобретением включает в себя следующие этапы: выбирают точку в линии передачи, защищенной дифференциально-токовой защитой; измеряют ток и напряжение на каждом из полюсов упомянутой линии передачи; вычисляют компенсирующие напряжения в выбранной точке соответственно в соответствии с измеренным током и напряжением на каждом полюсе; обнаруживают и вычисляют ошибку синхронизации путем сравнения всех компенсирующих напряжений.
В одном из предпочтительных вариантов осуществления настоящего изобретения ток и напряжение на каждом из полюсов измеряют до возникновения неисправности.
В другом предпочтительном варианте осуществления настоящего изобретения ток и напряжение на каждом из полюсов измеряют после возникновения неисправности.
В одном из предпочтительных вариантов осуществления ток и напряжение на каждом из полюсов являются векторными величинами.
В другом предпочтительном варианте осуществления ток и напряжение на каждом из полюсов являются выборочными значениями.
В одном из предпочтительных вариантов осуществления ток и напряжение на каждом из полюсов являются фазовыми величинами.
В другом предпочтительном варианте осуществления ток и напряжение на каждом из полюсов являются составляющими последовательности.
Точка может быть выбрана в любом месте линии передачи, в одном из предпочтительных вариантов осуществления точку выбирают предпочтительно посредине или на концах линии передачи или в месте Т-образного соединения многополюсных линий передачи. Для двухполюсной лини передачи упомянутую точку выбирают в любом месте линии передачи, предпочтительно посредине или на концах линии передачи; для трехполюсной линии передачи упомянутую точку выбирают в любом месте линии передачи, предпочтительно в месте Т-образного соединения или на конце линии передачи;
для линии передачи с более чем тремя полюсами линию передачи делят на двухполюсные линии передачи, трехполюсные линии передачи или их комбинацию; упомянутые точки выбирают в соответствии со способом, используемым для двухполюсной линии передачи или для трехполюсной линии передачи.
В одном из предпочтительных вариантов для осуществления предварительной синхронизации используют способ пусковых элементов, эхо-метод или усовершенствованный эхо-метод.
В одном из предпочтительных вариантов осуществления способ дифференциально-токовой защиты дополнительно включает в себя следующий этап: распознают, является ли вычисленная ошибка синхронизации следствием серьезного изменения параметров линии или следствием асимметричного переключения канала путем вычисления скорости изменения разности фаз или волнового сдвига упомянутого компенсирующего напряжения.
В одном из предпочтительных вариантов осуществления, если ток и напряжение на каждом из полюсов измеряют после возникновения неисправности, то ток и напряжение являются аварийными составляющими прямой последовательности, составляющими обратной последовательности, составляющими нулевой последовательности или их комбинацией.
Краткое описание чертежей
Объект настоящего изобретения более подробно раскрыт в нижеследующем описании со ссылкой на предпочтительные примеры вариантов осуществления, проиллюстрированные чертежами, на которых показано:
на Фиг.1 - схематическая диаграмма, иллюстрирующая способ синхронизации, основанный на нагрузочных токах;
на Фиг.2А-2С - векторные диаграммы нагрузочных токов для различного количества полюсов, где Фиг.2А - векторная диаграмма для двух полюсов. Фиг.2В - для трех полюсов. Фиг.2С - для четырех полюсов;
на Фиг.3 - концептуальная блок-схема первого предпочтительного варианта осуществления;
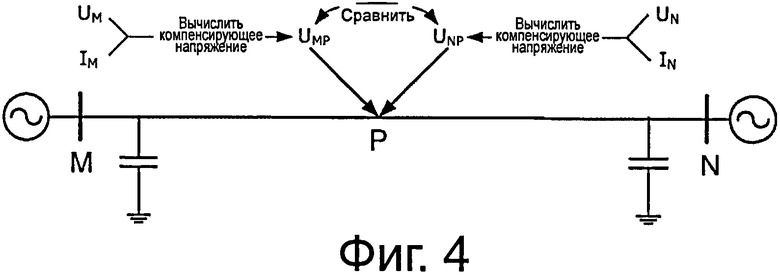
на Фиг.4 - схематическая диаграмма способа синхронизации на основе компенсирующего напряжения для двухполюсной линии передачи;
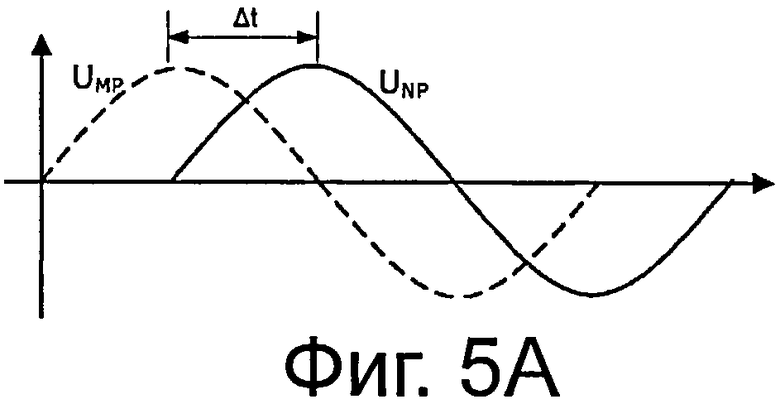
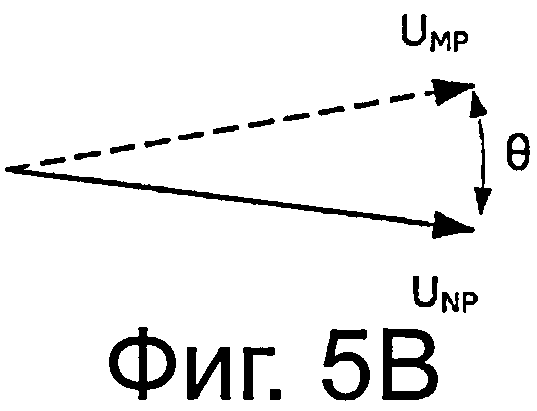
на Фиг.5А-5В - взаимосвязь между напряжениями выборочных данных и векторными формами;
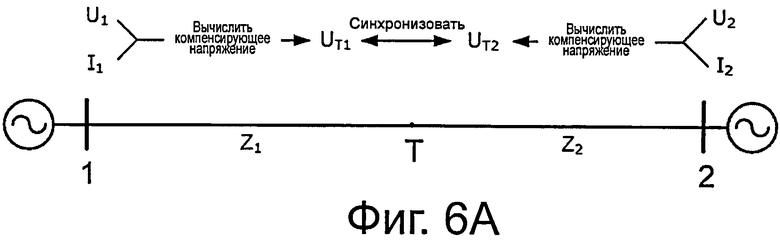
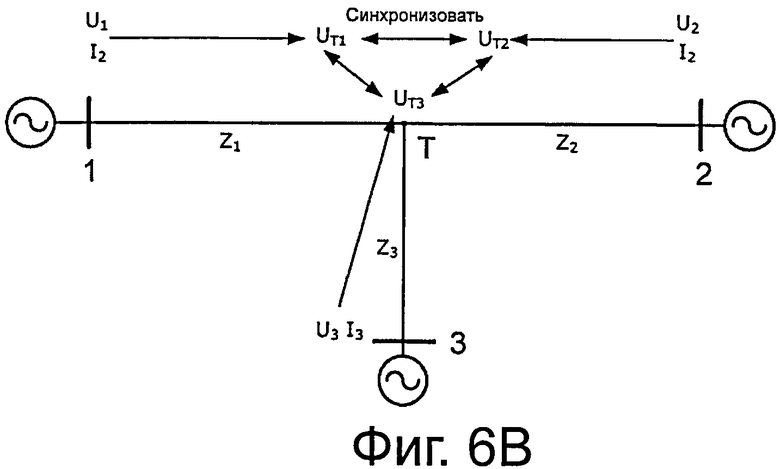
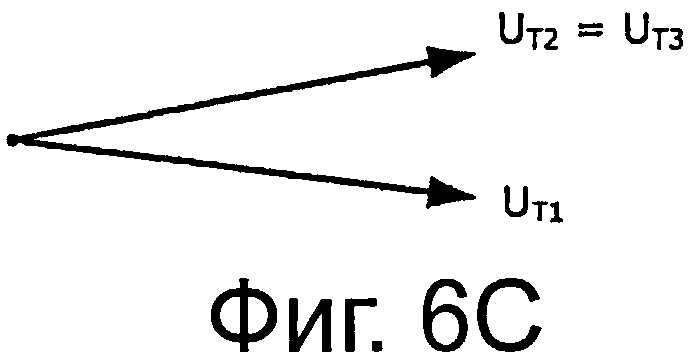
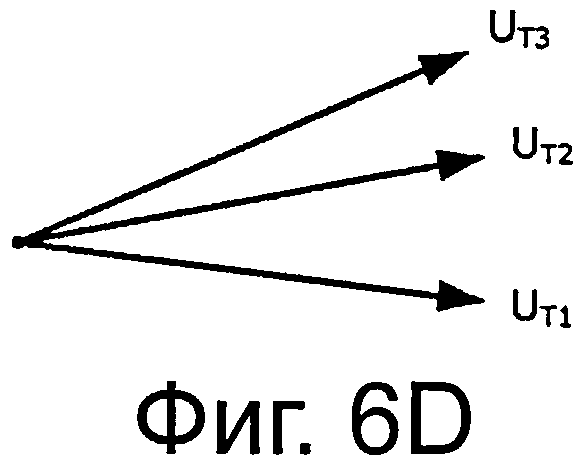
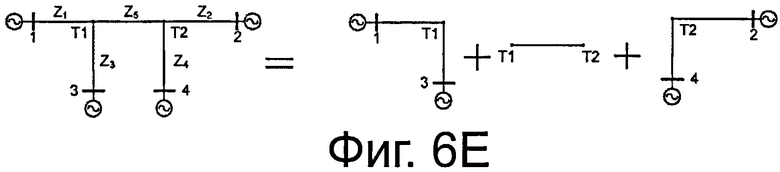
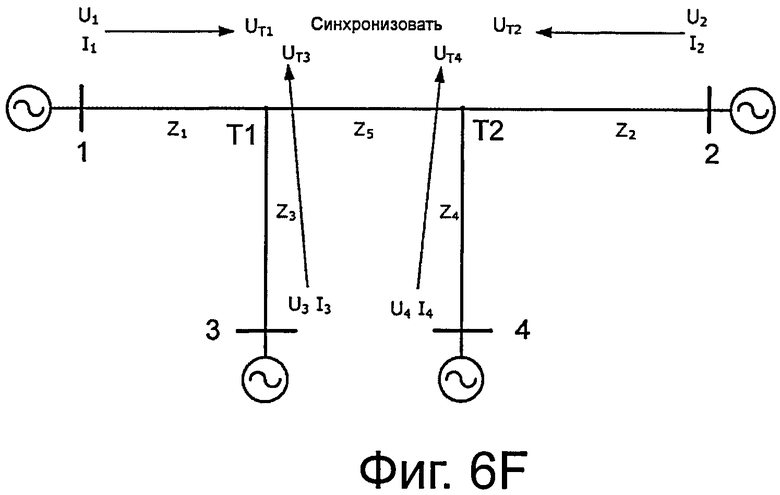
на Фиг.6А-6F - схематические диаграммы способа синхронизации на основе компенсирующего напряжения, где Фиг.6А - схематическая диаграмма двухполюсной линии передачи; Фиг.6В - схематическая диаграмма трехполюсной линии передачи; Фиг.6С - иллюстрация, когда только один полюс синхронизируют с другими полюсами трехпроводной линии передачи; Фиг.6D - иллюстрация, когда все три полюса синхронизируют друг с другом в трехпроводной линии передачи; Фиг.6Е - декомпозиция структуры многополюсных линий передачи; Фиг.6F - схематическое изображение многополюсных линий передачи;
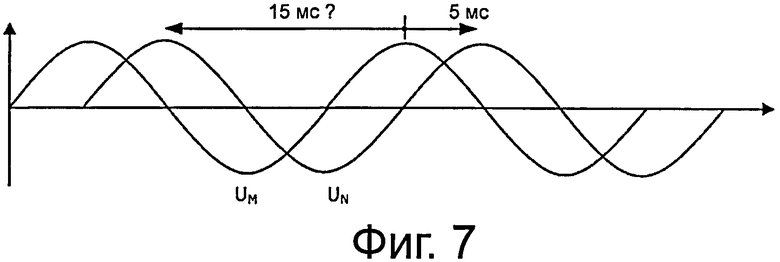
на Фиг.7 - иллюстрация случая, когда ошибка составляет более половины периода;
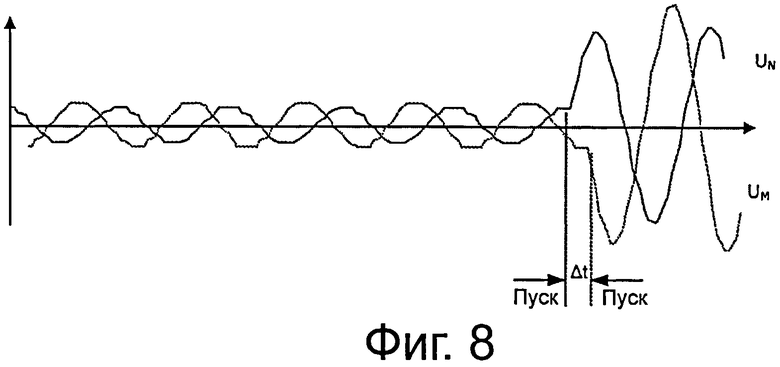
на Фиг.8 - иллюстрация предварительной синхронизации с использованием способа пусковых элементов;
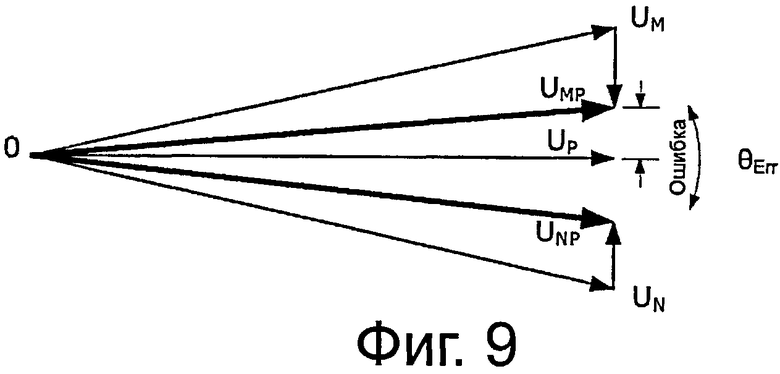
на Фиг.9 - иллюстрация влияния ошибки линейного параметра;
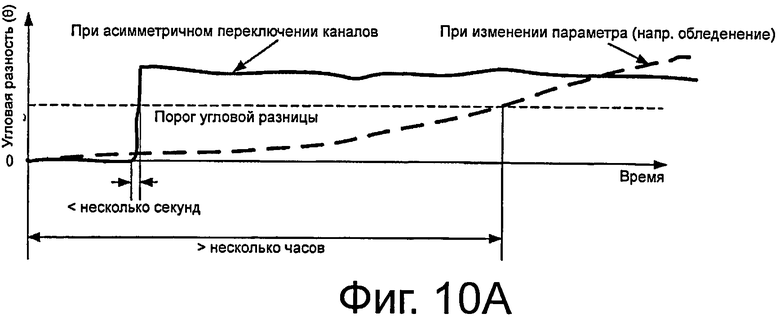
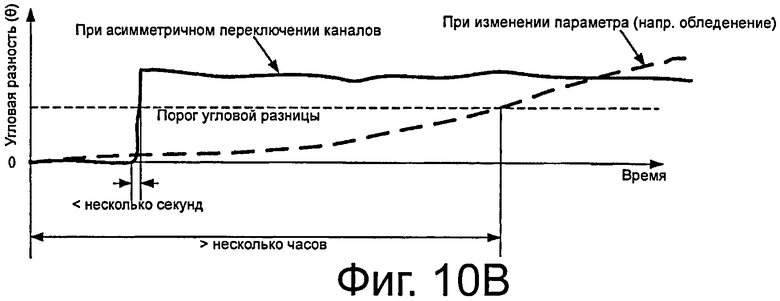
на Фиг.10А - иллюстрация разницы между асимметричным переключением канала и изменениями линейного параметра; на Фиг.10 В - способ распознавания обледенения и асимметричного переключения канала;
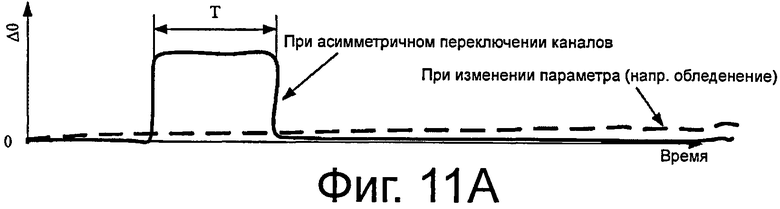
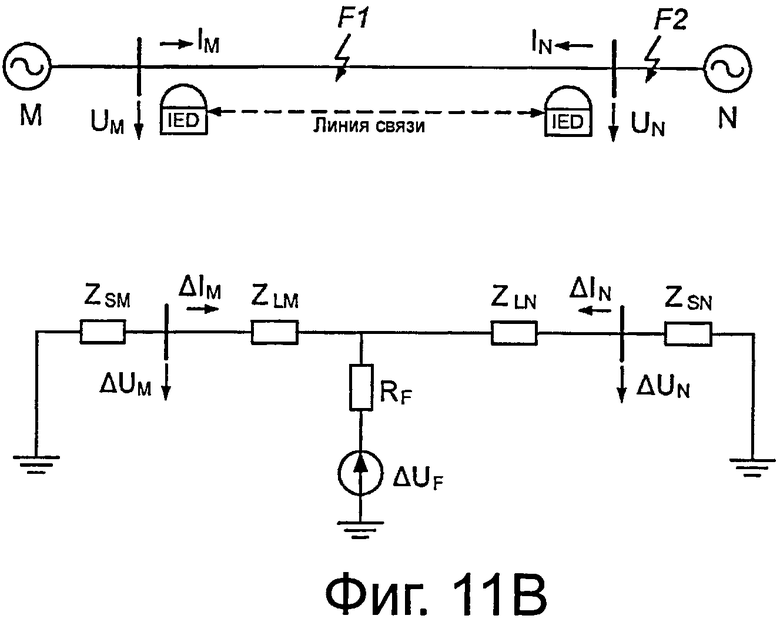
на Фиг.11А - типичная линия передачи с неисправностью; на Фиг.11В - схема последовательности аварийных составляющих при внутренней неисправности; на Фиг.11C - схема последовательности аварийных составляющих при внешней неисправности.
Подробное описание предпочтительных вариантов осуществления
Ниже описаны предпочтительные варианты осуществления настоящего изобретения со ссылкой на вышеупомянутые чертежи.
Способ настоящего изобретения предназначен для обеспечения синхронизации измерений для дифференциально-токовой защиты даже в том случае, когда канал связи становится асимметричным или сигнал от глобальной навигационной системы GPS неустойчивым. Он основан на компенсирующих напряжениях вместо нагрузочных токов, так что может применяться как при больших нагрузках, так и при отсутствии нагрузки. Более того, он может применяться в линиях передачи, имеющих более двух полюсов.
Способ синхронизации для дифференциально-токовой защиты в соответствии с настоящим изобретением включает в себя следующие этапы: выбирают точку на линии передачи, защищенной дифференциально-токовой защитой; измеряют ток и напряжение на каждом из полюсов упомянутой линии передачи; вычисляют компенсирующие напряжения в выбранной точке относительно и в соответствии с измеренным током и напряжением на каждом полюсе; обнаруживают и вычисляют ошибку синхронизации путем сравнения всех компенсирующих напряжений.
Предаварийный вариант осуществления
На Фиг.3 показана концептуальная блок-схема первого предпочтительного варианта осуществления. В данном предпочтительном варианте осуществления ток и напряжение на каждом из полюсов измеряют перед наступлением неисправности, и ток и напряжение на каждом из полюсов являются векторными величинами. Также предложен способ получения тока и напряжения на каждом из полюсов в виде выборочных значений.
В предаварийном состоянии компенсирующие напряжения в одной и той же точке линии передачи, вычисленные со всех полюсов, должны быть одинаковыми. Это означает, что, если напряжение в одной и той же точке вычисляют посредством измерений с разных полюсов, эти вычисленные (компенсирующие) напряжения должны быть одинаковыми, включая в себя фазовый угол и волновой сдвиг. Если фазы компенсирующих напряжений отличаются друг от друга, это означает, что синхронизация данных нарушена (канал связи стал асимметричным или сигнал глобальной навигационной системы стал неустойчивым). И разность фаз или волновой сдвиг между этими компенсирующими напряжениями могут быть использованы для синхронизации измерений с различных полюсов.
На Фиг.4 показана двухполюсная линия передачи. В предаварийном состоянии измеряют следующие сигналы:
на полюсе М: UM, IM,
на полюсе N: UN, IN.
Измерения с полюсов могут быть использованы для вычисления компенсирующего напряжения в точке Р. Здесь точка Р может быть любой точкой линии передачи (например, полюсом М, N или точкой посередине линии). Значения UM, IM используют для вычисления UMP, значения UN, IN используют для вычисления UNP. UMP и UNP являются напряжениями в одной и той же точке. Поэтому теоретически они должны быть одинаковы, если UM, IM и UN, IN синхронизованы надлежащим образом. А если UMP и UNP отличаются друг от друга, это означает, что имеются какие-то проблемы с синхронизацией. И это различие может быть использовано для компенсации данных, чтобы синхронизовать измерения.
Предлагаемый способ синхронизации является гибким в отношении типов параметров системы и измеряемых величин. Это означает, что вычисление может быть основано на сосредоточенных параметрах или на распределенных параметрах. И вычисление может быть основано на векторных величинах или выборочных значениях.
На Фиг.5А-5В показана взаимосвязь между напряжениями выборочных данных и векторными формами. Если данные с полюсов М и N не синхронизованы, то между двумя компенсирующими напряжениями UMP и UNP возникает временной сдвиг Δt, как показано на Фиг.5А. И это также может быть отображено на векторной диаграмме на Фиг.5В. Здесь θ=360°×Δt×f (где f - частота системы). Волновой сдвиг Δt или разность фаз θ как раз являются ошибкой синхронизации данных между измерениями с полюсов М (UM, IM) и N (UN, IN). И они могут быть непосредственно использованы для синхронизации/компенсации несинхронизованных данных.
Δt или θ могут быть вычислены с помощью векторных величин или выборочных значений следующим образом:
1) Вычисление на основе векторных величин
В данном предпочтительном варианте осуществления ток и напряжение вычисляют исходя из сосредоточенных параметров и векторных величин.
Предположим, что точка P является средней точкой линии, паразитная емкость равна ZC, полное сопротивление линии равно ZL.




Используя уравнения (1)-(4), временной сдвиг Δt или разность фаз θ между измерениями на двух полюсах могут быть определены и непосредственно использованы для компенсации векторной величины или выборочного значения следующим образом:

2) Вычисление на основе выборочных значений
В другом предпочтительном варианте осуществления ток и напряжение вычисляют исходя из выборочных значений и модели Бержерона.

где:
u(x,t) - компенсирующее напряжение (выборочное значение) в некоторой точке;
u(t), i(t) - измеренные напряжение и ток (выборочные значения) на полюсах;
ZC - паразитная емкость линии передачи;
u+ - прямая волна;
u- - обратная волна;
v - скорость распространения волны.
Используя уравнения (7)-(9), можно определить компенсирующее напряжение в любой точке линии передачи. Поэтому, предположив x=L/2, компенсированное напряжение посередине линии может быть вычислено исходя из измерений на двух полюсах соответственно в виде uMP(t) и uNP(t), разность двух компенсирующих напряжений может быть использована для вычисления временной разницы измерений на двух полюсах путем сравнения uMP(t) и uNP(t).
Сравнение двух компенсирующих напряжений может быть выполнено двумя способами:
1) во временной области;
2) в частотной области.
Сравнение формы волны, пересечения нуля или другие способы во временной области могут быть использованы для нахождения несимметрии во времени Δt (временного сдвига Δt на Фиг.5А) непосредственно из выборочных данных.
Что касается способов частотной области, то можно вычислить частотные векторы компенсирующих напряжений и затем вычислить разность фаз (θ на чертеже Фиг.5В). И эта разность фаз может быть использована для синхронизации данных измерений, как это показано ниже:

В уравнениях (7)-(9) все напряжения и токи являются модулями типа «фаза-фаза». Они могут быть следующих типов: (А-В), (В-С) или (С-А).
Напряжение в компенсирующей точке может быть очень низким, если точка попадает как раз в центр качания мощности, что влияет на точность и чувствительность способа синхронизации. Чтобы избежать этого, легко выбрать другую компенсирующую точку.
Преимущества способа вычислений, основанного на выборочных значениях, приведены ниже:
1) независимость от векторов, невосприимчивость к несинусоидальным волнам;
2) независимость от низкочастотных фильтров или дискретного преобразования Фурье (DFT), исключение соответствующих ошибок;
3) паразитная емкость принимается во внимание по определению;
4) может хорошо работать как с большой, так и с нулевой нагрузкой.
В случае сильных искажений формы волны тока или напряжения или быстрого качания мощности трудно получить точные вектора тока и напряжения. Поэтому с помощью способа, основанного на векторных величинах, трудно обеспечить точную синхронизацию, в то время как способ, основанный на выборочных значениях, может продолжать хорошо работать в таких условиях.
В другом предпочтительном варианте осуществления настоящего изобретения предложен способ синхронизации многополюсных линий передачи.
Способ синхронизации многополюсных линий передачи
1) Двухполюсные линии передачи
Для двухполюсных линий компенсирующей точкой Т для способа синхронизации может быть любая точка на линии. Ею может быть полюс 1, полюс 2, средняя точка или любая другая точка, расположенная между двумя полюсами. Способ синхронизации включает в себя два этапа, как это показано на Фиг.6А.
Вычисляют компенсирующие напряжения в точке Т путем измерений с двух полюсов соответственно (для простоты анализа паразитная емкость в данном случае проигнорирована)


Вычисляют разность фаз между двумя компенсирующими напряжениями. И затем используют разность фаз для синхронизации измерений.

Окончательными синхронизованными измерениями являются (при выборе полюса 1 в качестве опорного):
Полюс 1: U1, I1,
Полюс 2: U2ejθ, I2ejθ
2) Трехполюсные линии передачи
Подобно двухпроводной линии, компенсирующей точкой для способа синхронизации может быть любая точка на трехполюсной линии. Однако для удобства наилучшим выбором для компенсирующей точки является Т-образное соединение, как это показано на Фиг.6В. Способ синхронизации включает в себя следующие этапы:
Вычисляют три компенсирующих напряжения в точке Т путем измерений с трех полюсов соответственно (для простоты анализа паразитная емкость в данном случае проигнорирована)



Выбирают любое компенсирующее напряжение в качестве опорного и затем вычисляют две разности фаз между опорным напряжением и двумя другими компенсирующими напряжениями соответственно. Используют две разности фаз для синхронизации измерений с двух соответствующих полюсов


Окончательными синхронизованными измерениями являются (при выборе полюса 1 в качестве опорного):
Полюс 1: U1, I1,
Полюс 2: U2ejθ1, I2ejθ1
Полюс 3: U3ejθ2, I3ejθ2.
В качестве опорного может быть выбрано любое компенсирующее напряжение, и независимо от того, какие и сколько каналов связи являются несимметричными, способ синхронизации все равно работает превосходно. Дифференциальная защита следит только за относительной ошибкой (временным сдвигом) синхронизации между полюсами.
Для трехполюсной системы могут существовать два случая отсутствия синхронизации, которые приведены ниже.
Как показано на Фиг.6С, в некоторых случаях два из трех измерений синхронизованы, и только одно не синхронизовано с другими. В ряде других случаев, как показано на Фиг.6D, измерения со всех трех полюсов отличаются друг от друга.
Предлагаемый способ синхронизации хорошо работает в обоих случаях. Так как он как раз синхронизует все измерения путем исключения относительной разности фаз или временного сдвига между компенсирующими напряжениями независимо от того, какие и сколько измерений оказались несинхронизованными. Наряду с трехполюсными линиями то же справедливо для других многополюсных структур линий передачи.
3) Многополюсные линии передачи
На Фиг.6Е представлена декомпозиция структур многополюсных линий передачи. На Фиг.6F приведено схематическое изображение многополюсной линии передачи. Этапы синхронизации включают в себя (для простоты анализа паразитная емкость в данном случае проигнорирована):
Вычисляют четыре компенсирующих напряжения UT1 и UT3 в точке T1, UT2 и UT4 в точке Т2 путем измерений с четырех полюсов соответственно




Вычисляют разность фаз θ1 между UT1 и UT3 и затем синхронизуют их. Синхронизованными токами и напряжениями являются U1, I1, U3ejθ1, I3ejθ1 (полюс 1 выбран в качестве опорного).
Аналогичную операцию синхронизации проводят для полюсов 2 и 4. Вычисляют разность фаз θ2 между UT2 и UT4 и затем синхронизуют их. Синхронизованными токами и напряжениями являются U2, I2, U4ejθ2, I4ejθ2 (полюс 2 выбран в качестве опорного).


Выбирают любую точку межу T1 and T2 в качестве компенсирующей точки (в данном случае выбрана точка T1). Вычисляют компенсирующие напряжения с использованием синхронизованных данных, полученных на этапе 2. Затем вычисляют разность фаз θ2 и снова синхронизуют данные.


Окончательными синхронизованными измерениями являются (полюс 1 выбран в качестве опорного):
Полюс 1: U1, I11
Полюс 2: U2ejθ1, I2ejθ1
Полюс 3: U3ejθ3, I3ejθ3
Полюс 4: 

В другом предпочтительном варианте осуществления для предварительной синхронизации используют эхо-метод, усовершенствованный эхо-метод или способ пусковых элементов. Предварительная синхронизация осуществляется с использованием способа, который может иметь дело с большой ошибкой синхронизации, превышающей даже половину периода.
На Фиг.7 показан случай, когда ошибка составляет больше половины периода. UM и UN являются компенсирующими напряжениями в одной и той же точке, вычисленными по измерениям с полюсов М и N соответственно. Если ошибка синхронизации составляет больше половины периода, то способ синхронизации не может определить, какое направление является правильным для сдвига волны, т.к. фазовый угол является периодической величиной. Например, если текущие волновые сдвиги составляют 15 мс или 5 мс (частота системы 50 Гц), их вычисленные фазовые углы или волновые сдвиги будут одинаковыми. Решением проблемы является использование какого-нибудь другого способа для предварительной синхронизации, чтобы сначала сделать ошибку меньше половины периода, а затем использовать предлагаемый способ, основанный на компенсирующем напряжении, чтобы осуществить точную синхронизацию.
1) Предварительная синхронизация с использованием способа пусковых элементов
Время срабатывания двух пусковых элементов на двух полюсах может быть использовано для осуществления предварительной синхронизации, как это показано ниже. Затем используют предлагаемый способ синхронизации для осуществления точной синхронизации.
Как показано на Фиг.8, если ошибка синхронизации данных отсутствует и два пусковых элемента имеют одинаковое быстродействие, разность At двух времен запуска должна быть практически нулевой. И если на практике разность Δt не равна нулю, это означает, что что-то не в порядке с синхронизацией. Поэтому разность Δt может быть использована для предварительной синхронизации.
Очевидно, что необходимо, чтобы разница в быстродействии пусковых элементов составляла менее половины периода (10 мс для частоты системы 50 Гц), чтобы быть уверенным в достаточной точности предварительной синхронизации.
2) Предварительная синхронизация с использованием эхо-метода
Общая задержка канала передачи и канала приема может быть точно вычислена с помощью эхо-метода независимо от того, симметричны каналы или нет.

Если вычисленная общая задержка tTotal меньше чем один период, то ошибка синхронизации эхо-метода будет меньше половины периода. Поэтому может быть подтверждено, что для этого способа не существует проблемы ошибки синхронизации в половину периода.
Например, задержка в одном направлении составляет 3 мс, а в другом - 16 мс, система защиты будет использовать задержку 9,5 мс в качестве задержки канала для синхронизации данных при эхо-методе. И окончательная ошибка синхронизации terror составит 6,5 мс, что меньше половины периода, как показано ниже.

4) Предварительная синхронизация с использованием усовершенствованного эхо-метода
Как раскрыто в нашей предыдущей патентной заявке PCT/CN 2009/076347, усовершенствованный эхо-метод основан на характерных особенностях эхо-метода и локальных тактовых генераторов вместо измерений. Поэтому он может работать при асимметричном переключении канала, включая случаи, когда ошибки составляют более половины периода. Отсюда следует логический вывод, что усовершенствованный эхо-метод и способ синхронизации на основе компенсирующих напряжений могут дополнять друг друга. Сначала осуществляют предварительную синхронизацию с использованием эхо-метода и затем проводят точную синхронизацию с использованием упомянутого способа синхронизации на основе компенсирующих напряжений.
В другом предпочтительном варианте осуществления способ синхронизации дополнительно включает в себя этап распознавания, на котором путем вычисления скорости изменения разности фаз или волнового сдвига упомянутого компенсирующего напряжения определяют, чем вызвана вычисленная ошибка синхронизации: серьезным изменением линейного параметра или асимметричностью переключения канала.
Влияние серьезного изменения линейного параметра, вызванного, например, обледенением линии
Линейный параметр используют в способе синхронизации при осуществлении вычислений. Ошибка линейного параметра оказывает влияние на результат вычисления ошибки синхронизации. В нормальных рабочих условиях ошибка, обусловленная линейным параметром, мала. Так что она не создает каких-либо проблем для предлагаемого способа синхронизации в нормальных условиях работы. Но в некоторых конкретных случаях, подобных сильному обледенению, длина линии и линейный параметр сильно меняются, и ошибка, обусловленная линейным параметром, может превысить допустимый предел. Это может сильно повлиять на результат синхронизации. Поэтому необходимо использовать какой-нибудь способ выявления таких условий и блокировать выход способа синхронизации.
Соответствующая векторная диаграмма выглядит следующим образом. На Фиг.9 показан эффект влияния ошибки линейного параметра, где UM и UN являются измеренными напряжениями на полюсах М и N соответственно. UP - текущее напряжение в компенсирующей точке. UMP и UNP являются компенсирующими напряжениями, вычисленными на основе измерений с полюсов М и N.
Если ошибка отсутствует, то UP, UMP и UNP должны быть одинаковыми. Но из-за льда текущая длина линии и ее полное сопротивление будут больше, чем для вычислений в процессе синхронизации. Поэтому компенсирующие точки при вычислениях с различных полюсов более не будут одними и теми же, и это вызывает ошибку синхронизации θErr.
Ошибка синхронизации θErr возрастает с увеличением угла мощности между полюсами М и N (∠UM-UN). Это означает, что, если угол мощности мал (небольшая нагрузка), ошибка синхронизации тоже мала даже при большой ошибке линейного параметра.
Предлагаемый способ синхронизации основан на угловой разнице между двумя компенсирующими напряжениями в одной и той же точке. Если угловая разница изменяется от нуля до относительно большой величины, то это означает, что что-то не в порядке с синхронизацией данных. Но проблема состоит в том, что как асимметричное переключение канала, так и сильное изменение линейного параметра (например, из-за обледенения) могут приводить к одной и той же угловой разнице. Это наводит на мысль о необходимости распознавания этих процессов.
Скорости изменений при этих двух процессах очевидно различаются. Для асимметричного переключения каналов изменение носит резкий характер. Длительность процесса изменения составляет несколько секунд или даже меньше. А изменение линейного параметра на значительную величину, например, из-за обледенения является постепенным изменением. Процесс изменения может длиться несколько часов или даже несколько дней. Поэтому мы можем различать эти два процесса, контролируя скорость изменения, как это показано ниже.
На Фиг.10А показано различие между асимметричным переключением канала и изменениями линейного параметра. Жирная сплошная линия и жирная пунктирная линии являются угловыми различиями между двумя компенсирующими напряжениями в одной и той же компенсирующей точке при асимметричном переключении канала и при изменении линейного параметра соответственно. Очевидно, что скорости этих изменений различны.
На практике только резкое изменение угловой разности может быть использовано для синхронизации данных. И если выявлено постепенное и достаточно большое изменение, это означает, что линейный параметр значительно меняется (из-за обледенения или по другой причине), и предложенный способ синхронизации должен быть заблокирован.
Этот принцип может быть реализован различными способами; типичным способом является разностный способ, как показано ниже.

Здесь θ - угловая разность двух компенсирующих напряжений. А Т - временная задержка (например, несколько секунд). Задержка Т должна быть больше, чем самое длительное время переключения каналов для эхо-метода и меньше, чем самое короткое время процесса обледенения.
Результат вычисления для случая, показанного на Фиг.10А, приведен на чертеже Фиг.10В, иллюстрирующем способ распознавания обледенения и асимметричного переключения канала. Угловые различия при переключении канала (жирная сплошная линия) и при изменении линейного параметра (жирная пунктирная линия) очевидны и могут быть легко распознаны.
Как показано на Фиг.10В, если имеет место случай асимметричного переключения канала, то наблюдается явно выраженная нарастающая волна Δθ (жирная сплошная линия). В противоположность этому, если имеет место обледенение, то кривизна Δθ практически равна нулю (жирная пунктирная линия). Этот способ легко реализуется и имеет отличную чувствительность.
Послеаварийный вариант осуществления
В другом предпочтительном варианте осуществления ток и напряжение на каждом из полюсов измеряют до возникновения неисправности. Система электропитания после возникновения неисправности может быть представлена как суперпозиция аварийной системы электропитания, наложенной на систему электропитания до возникновения неисправности. Наложенная аварийная система электропитания может быть поделена на схемы прямой, обратной и нулевой последовательности аварийных составляющих. Эти три схемы одинаковы по конфигурации, однако отличаются параметрами.
На Фиг.11А показана типичная двухполюсная система передачи, и линия передачи защищена дифференциально-токовой защитой. На Фиг.11В показана ее схема последовательности аварийных составляющих при внутренней неисправности F1, в то время как на Фиг.11С показана ее схема последовательности аварийных составляющих при внешней неисправности F2. ΔU и ΔI являются аварийными составляющими последовательности (прямой, обратной и нулевой), измеренными интеллектуальными электронными устройствами (IED). ZSM и ZSN - это полные сопротивления источников со стороны полюса М и полюса N. ZLM и ZLN - полные сопротивления линии со стороны полюса М и полюса N относительно внутренней неисправной точки F1. ZL - полное сопротивление всей линии.
Неисправные составляющие могут быть вычислены путем вычитания измерений, проведенных до возникновения неисправности (выборок или векторов) из измерений (выборок или векторов), выполненных после возникновения неисправности.
Как показано на Фиг.11В, после возникновения внутренней неисправности, получаем:
ΔUM=-ΔIM·ZSM
ΔUN=-ΔIN·ZSN
Полагая, что полное сопротивление системы и полное сопротивление линии имеют одинаковые углы полного сопротивления, и, не учитывая распределенные емкостные токи на линии, получаем:
∠Δ≥IM=∠ΔIN
∠ZSM=∠ZSN
Таким образом, измеренные аварийные составляющие напряжения последовательности на обоих терминалах имеет одинаковые фазовые углы.
∠ΔUM=∠ΔUN
Как показано на Фиг.11C, после возникновения внешней неисправности получаем:
ΔUM=-ΔIM·ZSM
ΔUN=ΔIN·(ZSM+ZL)
Полагая, что полное сопротивление системы и полное сопротивление линии имеют одинаковые углы полного сопротивления, и, не учитывая распределенные емкостные токи на линии, получаем:
∠(-ΔIM)=∠ΔIN
∠ZSM=∠(ZSM+ZL)
Таким образом, измеренные аварийные составляющие напряжения последовательности на обоих терминалах имеет одинаковые фазовые углы:
∠ΔUM=∠ΔUN
Видно, что независимо от того, является неисправность внешней или внутренней, измеренные аварийные составляющие напряжения последовательности на обоих терминалах имеют одинаковые фазовые углы, т.е.
θU=∠ΔUM-∠ΔUN=0°
Также видно, что при внутренней неисправности измеренные аварийные составляющие токи последовательности на обоих терминалах имеют примерно одинаковые фазовые углы, в то время как при внешней неисправности они имеют практически обратные фазовые углы (разница составляет 180°), т.е.
θI=∠ΔIM-∠ΔIN=0° - внутренняя неисправность
θI=∠ΔIM-∠ΔIN=180° - внешняя неисправность
Как упомянуто выше, если задержки в линии связи асимметричны, то традиционный эхо-метод приводит к ошибке в синхронизации выборки, и ошибка будет равна половине разности между задержкой в линии передачи и задержкой в линии приема. Соответственно, фазовые соотношения между аварийными составляющими напряжениями/токами последовательности будут отличаться от полученных выше соотношений. Отклонение разности фаз составляет Δθ.
После вычисления отклонения разности фаз Δθ ошибка синхронизации, вызываемая задержкой в линии связи, может быть компенсирована непосредственно значением Δθ. Благодаря этому вектора (токов и напряжений), измеренные интеллигентными электронными устройствами на обоих полюсах, оказываются синхронизованными.
При необходимости, выборки, измеренные интеллигентными электронными устройствами на обоих полюсах, могут также быть синхронизованы путем сдвига выборок на Δt:
Δt=Δθ/(f·360°)
Здесь f - это частота сети, например, 50 Гц, 60 Гц.
Например, если Δθ=27° и f=50 Гц, тогда Δt=1,5 мс.
Предлагаемый способ основан на аварийных компонентах, поэтому синхронизация осуществляется только после возникновения неисправности (внутренней или внешней). Детектор неисправности должен находиться в каждом интеллигентном электронном устройстве, чтобы выявлять неисправность и запускать процесс синхронизации.
Вышеприведенный анализ проведен для двухполюсной дифференциально-токовой защиты. Аналогичный анализ может быть выполнен для многополюсной дифференциально-токовой защиты с такими же результатами.
Варианты осуществления
Настоящее изобретение может быть реализовано на основе вышеприведенного базового принципа. Возьмем в качестве примера двухполюсную дифференциально-токовую защиту:
А. Основываясь на последовательности напряжений
1) После возникновения неисправности (детекторы на обоих полюсах работают), выполняют следующие этапы с каждым дискретным значением или каждым заданным периодом:
2) вычислить составляющие аварийные напряжения последовательности;
3) вычислить отклонения фазовых соотношений Δθ=∠ΔUM-∠ΔUN;
4) использовать вычисленное значение Δθ для компенсации фаз фазных токов путем уменьшения фазовых углов векторов токов со стороны полюса М на величину Δθ или увеличения фазовых углов векторов токов со стороны полюса N на величину Δθ;
5) вычислить нормальную фазу дифференциального токового реле с помощью компенсирующих токов. Если критерии срабатывания выполняются, то соответствующие автоматические выключатели размыкаются.
В. Основываясь на последовательности токов
1) После возникновения неисправности (детекторы на обоих полюсах работают) выполняют следующие этапы с каждым дискретным значением или каждым заданным периодом.
2) Вычислить составляющие аварийные токи последовательности.
3) Определить с помощью направленных реле, является неисправность внутренней или внешней. Если оба интеллигентных электронных устройства указывают на прямое направление, то неисправность является внутренней, в противном случае неисправность является внешней.
4) Вычислить отклонения фазовых соотношений:
при внутренней неисправности Δθ=∠ΔIM-∠ΔIN;
при внешней неисправности Δθ=∠ΔIM-∠ΔIN-180°.
5) Использовать вычисленное значение Δθ для компенсации фаз фазных токов путем уменьшения фазовых углов векторов токов со стороны полюса М на величину Δθ или увеличения фазовых углов векторов токов со стороны полюса N на величину Δθ.
6) Вычислить нормальную фазу дифференциального токового реле с помощью компенсирующих токов. Если критерии срабатывания выполнены, то соответствующие автоматические выключатели размыкаются.
Вычисление Δθ может основываться на прямой, обратной или нулевой последовательности аварийных составляющих.
- При трехфазной работе предлагается вычислять Δθ с использованием обратной последовательности аварийных составляющих. Если обратная последовательность аварийных составляющих отсутствует (при симметричных неисправностях), предлагается вычислять Δθ с использованием прямой последовательности аварийных составляющих.
- При двухфазной работе предлагается вычислять Δθ с использованием прямой последовательности аварийных составляющих.
Основываясь на вышеприведенном принципе, можно разработать похожие способы, базирующиеся на фазовых компонентах или модульных компонентах, скорее, чем на составляющих последовательности.
С помощью способа синхронизации, предложенного в настоящем изобретении, дифференциально-токовая защита может работать надежно и правильно без ложных срабатываний или блокировки, даже если канал связи становится асимметричным или сигнал глобальной навигационной системы становится неустойчивым. Такой способ синхронизации значительно повышает надежность системы защиты.
Он не зависит от величины нагрузочного тока. Предлагаемый способ может надежно работать как при больших нагрузках, так и при отсутствии нагрузки.
Принцип и способ просты и понятны. Способ легко реализуем на существующих платформах.
Преимущества внешних способов синхронизации (эхо-метода и по сигналам глобальной навигационной системы) и предлагаемого способа дополняют друг друга.
Несмотря на то, что настоящее изобретение раскрыто на основе нескольких предпочтительных вариантов осуществления, специалистам в данной области техники понятно, что эти варианты осуществления ни в коем случае не ограничивают объем настоящего изобретения. Не выходя за рамки существа и идеи настоящего изобретения, специалисты с обычным уровнем знаний и опытом в данной области могут вносить любые изменения в варианты осуществления, попадающие в объем настоящего изобретения, определяемый нижеследующей формулой изобретения.
Использование: в области электротехники. Технический результат - повышение надежности. Способ включает следующие этапы: выбирают точку на линии передачи, защищенной дифференциально-токовой защитой; измеряют ток и напряжение на каждом из полюсов линии передачи; вычисляют компенсирующее напряжение в выбранной точке соответственно в соответствии с измеренными током и напряжением на каждом из полюсов; обнаруживают и вычисляют ошибку синхронизации путем сравнения компенсирующих напряжений. Ток и напряжение на каждом из полюсов измеряют до возникновения неисправности или после возникновения неисправности, и они могут быть измерены в виде векторных, выборочных величин, фазовых величин или значений последовательности. Точка может быть выбрана в любом месте линии передачи, предпочтительно посредине или на концах линии передачи, или в точке Т-образного соединения многополюсных линий передачи. Способ синхронизации дополнительно включает в себя этап распознавания, чем вызвана ошибка синхронизации: сильным изменением параметра линии или асимметричным переключением канала, распознавание осуществляют путем вычисления скорости изменения разности фазового угла или волнового сдвига указанного компенсирующего напряжения. 8 з.п. ф-лы, 22 ил.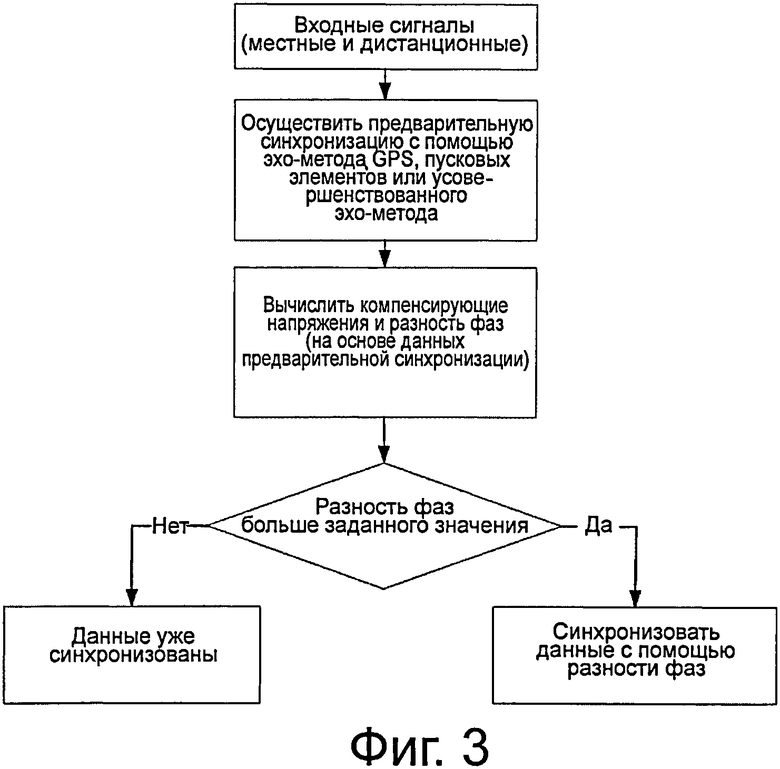
1. Способ синхронизации для дифференциально-токовой защиты, характеризующийся тем, что он включает в себя:
выбор точки на линии передачи, защищенной дифференциально-токовой защитой;
измерение тока и напряжения на каждом из полюсов линии передачи;
вычисление компенсирующего напряжения в выбранной точке соответственно в соответствии с измеренным значением тока и напряжения на каждом из полюсов;
обнаружение и вычисление ошибки синхронизации путем сравнения компенсирующих напряжений.
2. Способ по п.1, в котором указанные ток и напряжение на каждом из полюсов измеряют до возникновения неисправности или после возникновения неисправности.
3. Способ по п.1, в котором указанные ток и напряжение на каждом из полюсов являются векторными величинами или выборочными значениями.
4. Способ по п.1, в котором ток и напряжение на каждом из полюсов являются фазовыми величинами или составляющими последовательности.
5. Способ по п.1, в котором указанную точку выбирают из любых точек линии передачи, предпочтительно посредине или на концах линии передачи, или в точке Т-образного соединения многополюсных линий передачи.
6. Способ по п.5, в котором:
для двухполюсной линии передачи указанную точку выбирают из любых точек линии передачи, предпочтительно посредине или на конце линии передачи;
для трехполюсной линии передачи указанную точку выбирают из любых точек линии передачи, предпочтительно из точек Т-образного соединения или на конце линии передачи;
для линии передачи с более чем тремя полюсами линию передачи делят на двухполюсные линии передачи, трехполюсные линии передачи или их комбинацию; при этом указанные точки выбирают в соответствии со способом для двухполюсной линии передачи или для трехполюсной линии передачи.
7. Способ по п.1, в котором для предварительной синхронизации используют способ пусковых элементов, эхо-метод или усовершенствованный эхо-метод.
8. Способ по п.1, дополнительно включающий этап, на котором путем вычисления скорости изменения разности фазового угла или волнового сдвига указанного компенсирующего напряжения распознают, чем вызвана ошибка синхронизации: сильным изменением параметра линии или асимметричным переключением канала.
9. Способ по п.2, в котором, если ток и напряжение на каждом из полюсов измеряют после возникновения неисправности, ток и напряжение являются аварийными составляющими прямой последовательности, обратной последовательности, нулевой последовательности или комбинацией некоторых из них.
| WO 2009147078A1, 10.12.2009 | |||
| 0 |
|
SU87841A1 | |
| CN 101075754A, 21.11.2007 | |||
| US 2005049806A1, 03.03.2005 | |||

