ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящая заявка относится к способу оценивания положения и устройству управления положением.
УРОВЕНЬ ТЕХНИКИ
[0002] Ранее были предложены устройства обнаружения положения, которые обнаруживают вращательное положение ротора в двигателе с магнитными датчиками. Например, в патентном документе 1 описано управление вращательным положением двигателя с использованием сигналов обнаружения, полученных от фотодатчика и диска датчика положения, присоединенного к двигателю.
БИБЛИОГРАФИЯ
Патентный источник
[0003] [Патентный документ 1] Выложенная патентная заявка Японии № 2012-213308
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая проблема
[0004] Согласно патентному документу 1, сигнал обнаружения, считываемый датчиком положения, подвергается влиянию окружающей среды, например, частиц пыли. Кроме того, двигатель будет увеличиваться в размере, чтобы вмещать в себя датчик положения.
[0005] Согласно настоящему изобретению, предусмотрены варианты осуществления способов оценивания положения и устройств управления положением, благодаря чему, сигналы обнаружения для обнаружения положения подвижной части не подвергаются влиянию окружающей среды, что повышает точность обнаружения положения.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] В одной реализации способа оценивания положения согласно настоящему изобретению, на этапе обнаружения сигнала, каждый из N (где N - целое число, равное 3 или более) датчиков обнаруживает магнитное поле, которое соответствует положению подвижной части и выводит электрический сигнал. Сигналы обнаружения сдвинуты по фазе на угол, полученный делением 360 градусов на N. Затем, на этапе обнаружения пересечения, секция обнаружения пересечения последовательно обнаруживает пересечение, на котором каждый сигнал обнаружения, выводимый на этапе обнаружения сигнала, пересекает другой. Затем, на этапе обнаружения подразделения, секция обнаружения подразделения обнаруживает участок сигнала обнаружения, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, в качестве одного или более сигналов подразделения. Затем, на этапе соединения сегментов линии, секция соединения сегментов линии последовательно соединяет сигналы подразделения и оценивает положение подвижной части на основании множественных соединенных сигналов подразделения, для генерации сигнала оцененного значения положения.
[0007] Одна реализация устройства оценивания положения согласно настоящему изобретению является устройством оценивания положения, которое оценивает положение подвижной части, имеющей множество магнитных полюсов, причем устройство оценивания положения содержит: N (где N - целое число, равное 3 или более) датчиков для обнаружения магнитных полей, созданных множеством магнитных полюсов, причем каждый из N датчиков выводит сигнал обнаружения, величина которого соответствует напряженности обнаруженного магнитного поля, и N датчиков располагаются так, что N сигналов обнаружения сдвинуты по фазе на угол, равный 360 градусов/N; схему предобработки для генерации N скорректированных сигналов обнаружения из N сигналов обнаружения; схему обработки сигнала для генерации и вывода сигнала, указывающего оцененное значение положения подвижной части на основании N скорректированных сигналов обнаружения; и носитель данных, подключенный к схеме обработки сигнала, где хранится компьютерная программа для управления работой схемы обработки сигнала. в соответствии с инструкциями компьютерной программы, схема обработки сигнала осуществляет: последовательное обнаружение пересечения, на котором два сигнала из N скорректированных сигналов обнаружения пересекаются друг с другом; подразделение скорректированного сигнала обнаружения, который связывает от пересечения к другому пересечению, которое является смежным для этого пересечения, на один или более сегментов, и обнаружение каждого сегмента в качестве сигнала подразделения; считывание, из устройства хранения, данных измерений, в которых величина перемещения подвижной части, соответствующая каждому сегменту, связана с каждым сегментом; согласно данным измерений, идентифицирующим сегмент, который соответствует текущему положению подвижной части, на основании соотношения N скорректированных сигналов обнаружения и на основании сигналов подразделения; и на основании идентифицированного сегмента, определение оцененного значения положения подвижной части из уровней сигналов подразделения, и вывод сигнала, указывающего оцененное значение положения.
[0008] Другая реализация устройства оценивания положения согласно настоящему изобретению является устройством оценивания положения, которое оценивает положение подвижной части, имеющей множество магнитных полюсов, причем устройство оценивания положения содержит: N (где N - целое число, равное 3 или более) датчиков для обнаружения магнитных полей, созданных множеством магнитных полюсов, причем каждый из N датчиков выводит сигнал обнаружения, величина которого соответствует напряженности обнаруженного магнитного поля, и N датчиков располагаются так, что N сигналов обнаружения сдвинуты по фазе на угол, равный 360 градусов/N; схему предобработки для генерации N скорректированных сигналов обнаружения из N сигналов обнаружения; схему обработки сигнала для генерации и вывода сигнала, указывающего оцененное значение положения подвижной части на основании N скорректированных сигналов обнаружения; и носитель данных, подключенный к схеме обработки сигнала, где хранится компьютерная программа для управления работой схемы обработки сигнала. В соответствии с инструкциями компьютерной программы, схема обработки сигнала осуществляет: последовательное обнаружение пересечения, на котором два сигнала из N скорректированных сигналов обнаружения пересекаются друг с другом, подразделение скорректированного сигнала обнаружения, который связывает от пересечения к другому пересечению, которое является смежным для этого пересечения, на один или более сегментов, и обнаружение каждого сегмента в качестве сигнала подразделения; последовательное соединение сигналов подразделения и, на основании множественных соединенных сигналов подразделения, определение оцененного значения положения подвижной части из уровней сигналов подразделения, и вывод сигнала, указывающего оцененное значение положения.
[0009] Одна реализация системы управления положением согласно настоящему изобретению является системой управления положением которое управляет положением подвижной части, причем устройство управления положением содержит: любое из вышеупомянутых устройств оценивания положения; схему возбуждения (приведения в действие) для возбуждения подвижной части; и схему управления, подключенную к схеме возбуждения для подачи заданного значения напряжения на схему возбуждения, причем схема управления определяет заданное значение напряжения на основании сигнала, указывающего оцененное значение положения подвижной части, полученного из устройства оценивания положения, и на основании заданного значения положения, которое вводится из внешнего устройства.
ПОЛОЖИТЕЛЬНЫЕ РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
[0010] Согласно варианту осуществления настоящего изобретения, сигнал обнаружения от секции обнаружения, которая обнаруживает положение подвижной части, не подвергается влиянию окружающей среды, например, частиц пыли.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Фиг. 1 - схема, демонстрирующая конструкцию устройства обнаружение положения согласно первому варианту осуществления.
Фиг. 2 - схема, демонстрирующая принципиальную конструкцию двигателя согласно первому варианту осуществления.
Фиг. 3 - диаграмма, демонстрирующая примеры сигналов Hu0, Hv0 и Hw0 обнаружения, которые выводятся из секции усиления согласно первому варианту осуществления.
Фиг. 4 - блок-схема операций, демонстрирующая процедуру обработки, осуществляемой секцией оценивания положения согласно первому варианту осуществления.
Фиг. 5 - диаграмма, описывающая примеры сигналов Hu0', Hv0' и Hw0' обнаружения, которые выводятся секцией AD-преобразования согласно первому варианту осуществления.
Фиг. 6A - диаграмма, описывающая относительные величины, пересечения, пересечения нулевого уровня и сигнал подразделения, связанный с тремя сигналами Hu0', Hv0' и Hw0' обнаружения, согласно первому варианту осуществления.
Фиг. 6B - диаграмма, описывающая соединение сигналов подразделения, которые составляют один цикл электрического угла согласно первому варианту осуществления.
фиг. 7 - диаграмма, описывающая соединение сигналов подразделения, которые составляют один цикл механического угла, согласно первому варианту осуществления.
Фиг. 8 - схема, демонстрирующая конструкцию системы управления двигателем согласно второму варианту осуществления.
Фиг. 9 - блок-схема операций, демонстрирующая процедуру обработки, осуществляемой секцией вычисления положения согласно второму варианту осуществления.
Фиг. 10 - блок-схема операций, демонстрирующая процедуру обработки первой коррекции согласно второму варианту осуществления.
Фиг. 11 - диаграмма формы волны иллюстративного результата осуществления первой коррекции согласно второму варианту осуществления.
Фиг. 12 - диаграмма формы волны иллюстративного результата осуществления второй коррекции согласно второму варианту осуществления.
Фиг. 13 - блок-схема операций, демонстрирующая процесс вычисления значений коррекции смещения, положительных значений коррекции коэффициента усиления и отрицательных значений коррекции коэффициента усиления согласно второму варианту осуществления.
Фиг. 14 - диаграмма формы волны, в которой сигналы подразделения, составляющие один цикл электрического угла объединяются согласно настоящему варианту осуществления.
Фиг. 15 - диаграмма формы волны иллюстративного результата осуществления третьей коррекции согласно второму варианту осуществления настоящего варианта осуществления.
Фиг. 16 - схема, демонстрирующая конструкцию системы управления двигателем согласно третьему варианту осуществления.
Фиг. 17 - диаграмма, поясняющая нормирование сигналов подразделения согласно третьему варианту осуществления.
Фиг. 18 - диаграмма, поясняющая вычисление нормирующего коэффициента согласно третьему варианту осуществления.
Фиг. 19 - диаграмма, описывающая вычисление механического угла согласно третьему варианту осуществления.
Фиг. 20 - блок-схема операций, демонстрирующая процедуру оценивания начального положения ротора R согласно третьему варианту осуществления.
Фиг. 21 - принципиальная схема генератора 100 Холла.
Фиг. 22 - график, демонстрирующий иллюстративное соотношение между выходным напряжением и подаваемым напряжением Vin генератора 100 Холла в постоянном магнитном поле.
Фиг. 23 - принципиальная схема, демонстрирующая иллюстративную конструкцию, в которой три датчика 11-13 реализованы тремя генераторами Холла.
Фиг. 24 - диаграмма, демонстрирующая иллюстративные температурные характеристики генератора 100 Холла.
Фиг. 25 - схема, демонстрирующая значения сопротивления R1, Rin1, Rin2, Rin3 и R2 резистора 15, датчика 11, датчика 12, датчика 13 и резистора 16.
Фиг. 26 - принципиальная схема, демонстрирующая иллюстративную конструкцию схемы генераторов 100 Холла согласно четвертому варианту осуществления.
Фиг. 27 - принципиальная схема, демонстрирующая иллюстративную конструкцию согласно пятому варианту осуществления, которая, когда выходной сигнал генератора Холла изменяется вследствие изменений температуры окружающей среды, корректирует это изменение.
Фиг. 28 - схема, демонстрирующая конструкцию секции 32 вычисления положения согласно шестому варианту осуществления.
фиг. 29 - схема, демонстрирующая форму волны сигнала (сигнала, указывающего оцененное значение положения), который выводится из секции 323 соединения сегментов линии, и иллюстративные формы волны сигнала Z-фазы в каждом из вышеописанных вариантов осуществления.
Фиг. 30 - схема, демонстрирующая конструкцию системы управления двигателем согласно настоящему варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0012] Далее, со ссылкой на чертежи, при необходимости, будут подробно описаны варианты осуществления настоящего изобретения. Однако заметим, что подробные описания, в отсутствие в них необходимости, могут быть опущены. Например, подробные описания того, что хорошо известно в уровне техники, или избыточные описания того, что имеет, по существу, тот же состав, могут быть опущены. Это позволяет избегать многословного описания и облегчают понимание специалистов в данной области техники. Прилагаемые чертежи и нижеследующее описание, которые обеспечены авторами изобретения, которые позволяют специалистам в данной области техники лучше понять настоящее изобретение, не призваны ограничивать объем формулы изобретения.
[0013] Первый вариант осуществления
На фиг. 1 показана схема, демонстрирующая иллюстративную конструкцию системы 1 управления двигателем согласно настоящему варианту осуществления.
[0014] Как показано на фиг. 1, система 1 управления двигателем настоящего варианта осуществления включает в себя двигатель M, секцию 10 обнаружения, секцию 20 усиления, секцию 30 оценивания положения, вычитатель 40, секцию 50 управления (схему управления) и секцию 60 возбуждения (схему возбуждения). От внешнего устройства 70, заданное значение положения Θ* вводится в систему 1 управления двигателем. Верхний индекс * указывает заданное значение. Верхний индекс ^ указывает оцененное значение. Согласно варианту осуществления настоящего изобретения, вращение CW означает вращение по часовой стрелке при наблюдении со стороны выходного вала.
[0015] Система 1 управления двигателем подлежит использованию в форме установленной в изделии. Изделие может представлять собой, например: многофункциональное изделие (MFP), имеющее принтер, сканер, факсимильный аппарат и другие функции; управление электрической мощностью; устройство наклона антенны; вентилятор; и т.п. При использовании в многофункциональном изделии, система 1 управления двигателем может использоваться как установленная в таких механизмах, например, как секция подачи бумаги.
[0016] Хотя случай, когда двигатель M включает в себя ротор R, будет описан ниже в порядке примера, это не является ограничением. Двигатель M может быть линейным двигателем. В случае, когда двигатель M является линейным двигателем, двигатель M включает в себя подвижную часть (или подвижный элемент), который совершает линейное движение, вместо ротора R. Другими словами, вариант осуществления настоящего изобретения может управлять подвижной частью (ротором), которая совершает вращательное движение, или управлять подвижной частью, которая совершает линейное движение. Таким образом, она может быть любой подвижной частью, независимо от вращательного движения или линейного движения. В настоящей заявке, термин "подвижная часть" означает приводимый в действие элемент, который совершает вращение или перемещение под действием внешней силы.
[0017] Двигатель M включает в себя ротор R. Двигатель M может представлять собой, например, двигатель с постоянными магнитами. К двигателю M присоединена основа, которая не показана. На основе установлены секция 10 обнаружения, секция 20 усиления, секция 30 оценивания положения, вычитатель 40, секция 50 управления и секция 60 возбуждения.
[0018] Секция 10 обнаружения включает в себя датчики 11-13. Каждый из датчиков 11-13 представляет собой бесконтактный магнитный датчик, который преобразует магнитное поле, генерируемое в двигателе M в электрические сигналы для вывода. Каждый из датчиков 11-13 может представлять собой, например, генератор Холла. Секция 10 обнаружения выводит в секцию 20 усиления обнаруженные дифференциальные сигналы датчика. Работа системы 1 управления двигателем согласно настоящему варианту осуществления включает в себя этап обнаружения сигнала. На этапе обнаружения сигнала, каждая из N (где N - целое число, равное 3 или более) секций обнаружения обнаруживает магнитное поле, которое соответствует положению подвижной части, и выводит сигнал обнаружения в качестве электрического сигнала, причем эти сигналы обнаружения сдвинуты по фазе на угол, полученный делением 360 градусов на N. При наличии количеств N (где N - целое число, равное 3 или более) таких датчиков, обнаруживаются магнитные поля, создаваемые множеством магнитных полюсов, и выводятся сигналы обнаружения, каждый из которых имеет величину, которая соответствует напряженности обнаруженного магнитного поля. N датчиков располагаются так, что N сигналов обнаружения сдвинуты по фазе на угол 360 градусов/N. Сигналы обнаружения, сдвинутые по фазе на угол 360 градусов/N, охватывает те, которые сдвинуты по фазе на электрический угол, который равен 360 градусов × целое число ± 360 градусов/N. Сигналы обнаружения, сдвинутые по фазе на угол, например, 120 градусов (=360 градусов/3), охватывает три сигнала обнаружения, сдвинутые по фазе на электрический угол 240 градусов (= 360 градусов - 120 градусов).
[0019] Секция 20 усиления включает в себя дифференциальные усилители 21-23. На основании дифференциальных сигналов датчика, которые вводятся из секции 10 обнаружения, секция 20 усиления генерирует сигнал Hu0 обнаружения, сигнал Hv0 обнаружения и сигнал Hw0 обнаружения. Секция 20 усиления выводит генерируемый сигнал Hu0 обнаружения, сигнал Hv0 обнаружения и сигнал Hw0 обнаружения на секцию 30 оценивания положения. Заметим, что сигнал Hu0 обнаружения, сигнал Hv0 обнаружения и сигнал Hw0 обнаружения являются аналоговыми сигналами.
[0020] На основании сигнала Hu0 обнаружения, сигнала Hv0 обнаружения и сигнала Hw0 обнаружения, которые были введены из секции 20 усиления, секция 30 оценивания положения оценивает вращательное положение ротора R. На основании оцененного вращательного положения, секция 30 оценивания положения генерирует механический угол Θ^ и выводит генерируемый механический угол Θ^ на вычитатель 40.
[0021] Вычитатель 40 принимает механический угол Θ^, вводимый из секции 30 оценивания положения, и заданное значение положения Θ*, вводимое из внешнего устройства 70. Вычитатель 40 вычисляет расхождение между заданным значением положения Θ* и механическим углом Θ^, и выводит вычисленное расхождение на секцию 50 управления.
[0022] На основании расхождения, вводимого из вычитателя 40, секция 50 управления генерирует заданное напряжение для возбуждения двигателя M и выводит генерируемое заданное напряжение на секцию 60 возбуждения.
[0023] На основании заданного напряжения, вводимого из секции 50 управления, секция 60 возбуждения генерирует сигнал возбуждения, и возбуждает двигатель M с генерируемым сигналом возбуждения. Типичным примером секции 60 возбуждения является инвертирующей схемой. Инвертирующая схема может включать в себя: схему PWM, которая выводит сигнал широтно-импульсной модуляции (PWM) в соответствии с заданным напряжением; схему предварительного возбуждения, которая выводит сигнал возбуждения вентиля на основании сигнала PWM; и выходную схему инвертора, которая осуществляет переключение в ответ на сигнал возбуждения вентиля.
[0024] Секция 50 управления и часть секции 60 возбуждения (например, схемы PWM) могут быть реализованы в виде однокорпусной интегральной схемы. Такая однокорпусная интегральная схема будет доступна в виде микрокомпьютера управления двигателем общего назначения. Выходная схема инвертора в схеме 60 возбуждения также может именоваться силовым модулем. Такая выходная схема инвертора способна подавать напряжение, величина которого соответствует заданному напряжению, на каждую катушку двигателя M, таким образом, возбуждая двигатель M.
[0025] Таким образом, система 1 управления двигателем осуществляет управление, принимая заданное значение положения Θ* от внешнего устройства 70 и возвращая расхождение или ошибку между заданным значением положения Θ* и механическим углом Θ^. В данном случае, система 1 управления двигателем последовательно обнаруживает пересечения, где сигналы Hu0, Hv0 и Hw0 обнаружения пересекаются друг с другом, и обнаруживает, в качестве сигнала подразделения, участка (подразделенного сегмента линии) сигнала Hu0, Hv0 или Hw0 обнаружения от обнаруженного пересечения к другому пересечению, которое является смежным для этого пересечения (см. фиг. 6A).
[0026] Из трех сигналов Hu0, Hv0 и Hw0 обнаружения, которые сдвинуты по фазе на 120 градусов, любой участок, который соединяет или связывает от пересечения к другому пересечению, которое является смежным для этого пересечения, является участком одного сигнала Hu0, Hv0 или Hw0, который имеет промежуточный уровень из сигналов Hu0, Hv0 и Hw0 обнаружения. Как показано на фиг. 6A, участок, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения пересекает опорный уровень. Другими словами, участок, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, имеет участок, который больше опорного значения, и участок, который меньше опорного значения. Как будет описано ниже, участок, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, может обрабатываться как единый "сигнал подразделения", или обрабатываться как два "сигнала подразделения". В последнем случае, участок, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, делится на два участка точкой пересечения нулевого уровня с опорным значением. Участок, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, может делиться на три или более "сигналов подразделения".
[0027] В соответствии с направлением движения подвижной части, система 1 управления двигателем последовательно соединяет обнаруженные сигналы подразделения, и оценивает положение подвижной части на основании множественных соединенных сигналов подразделения, таким образом, генерируя сигнал оцененного значения положения (см. фиг. 6B, фиг. 7). Заметим, что оцененное значение положения может использоваться в качестве значения обратной связи системой управления электрическим током, системой управления скоростью, системой управления положением или любой системой управления, которая является их комбинацией. Секция 32 вычисления положения и секция 50 управления функционируют как "устройство управления положением".
[0028] Далее будет описана принципиальная конструкция двигателя M.
[0029] На фиг. 2 показана схема, демонстрирующая принципиальную конструкцию двигателя M согласно настоящему варианту осуществления.
[0030] В примере, показанном на фиг. 2, двигатель M является двигателем с постоянными магнитами. Магнитные полюсы p1 - p12 являются магнитными полюсами двигателя с постоянными магнитами. Количество полюсов, которое указывает количество магнитных полюсов в двигателе M, равно 12 в примере, показанном на фиг. 2. Количество пар полюсов, которое указывает количество пар, состоящих из полюса N и полюса S, равно 6 в примере, показанном на фиг. 2. Башмаки sl1 - sl9 представляют собой сердечники, вокруг каждого из которых намотана катушка. Количество башмаков, которое указывает, сколько существует башмаков (зубьев), равно 9. Например, магнитные полюсы p1 - p12 могут быть участками ротора R (см. фиг. 1). Двигатель M на фиг. 2 представляет двигатель с внешним ротором.
[0031] Далее будет описана работа датчиков 11-13.
[0032] Каждый из датчиков 11-13 обнаруживает магнитное поле, которое основано на пара смыкающихся полюса N и полюса S, и выводит сигнал, который составляет один цикл. Это соответствует одному циклу электрического угла. В форме дифференциальных сигналов датчика, каждый из датчиков 11-13 выводит обнаруженный электрический сигнал, который составляет один цикл электрического угла, на секцию 20 усиления. Эти дифференциальные сигналы датчика, которые составляют один цикл, соответствуют одному циклу электрического угла.
[0033] Теперь датчики 11-13, соответственно, обнаруживают электрические сигналы, которые сдвинуты по фазе на 120 градусов электрического угла, и выводят их на соответствующие дифференциальные усилители 21-23. Другими словами, существует три датчика, включенных в секции 10 обнаружения, благодаря чему, три сигнала обнаружения сдвинуты по фазе на 120 градусов. В одном конкретном примере, датчики 11-13 обнаруживают электрические сигналы, которые сдвинуты по фазе на 40 градусов механического угла (240 градусов электрического угла).
[0034] В настоящем варианте осуществления, электрический сигнал, который обнаруживается датчиком 11, обозначен как U-фаза. Электрический сигнал, который обнаруживается датчиком 12, обозначен как V-фаза. Электрический сигнал, который обнаруживается датчиком 13, обозначен как W-фаза. Дифференциальные сигналы датчика, которые выводятся из датчика 11, являются дифференциальными сигналами U0+ и U0- датчика, обратны другу другу. Дифференциальные сигналы датчика, которые выводятся из датчика 12, являются дифференциальными сигналами V0+ и V0- датчика, обратны другу другу. Дифференциальные сигналы датчика, которые выводятся из датчика 13, являются сигналами W0+ и W0- обнаружения, обратны другу другу.
[0035] Далее, со ссылкой на фиг. 1, будут описано сигналы обнаружения, подлежащие выводу из секции 20 усиления.
[0036] Дифференциальный усилитель 21 усиливает разность напряжений между сигналами U0- и U0+ обнаружения U-фазы, которые вводятся из датчика 11, и выводит усиленный сигнал Hu0 обнаружения на секцию 30 оценивания положения.
[0037] Дифференциальный усилитель 22 усиливает разность напряжений между сигналами V0- и V0+ обнаружения V-фазы, которые вводятся из датчика 12, и выводит усиленный сигнал Hv0 обнаружения на секцию 30 оценивания положения.
[0038] Дифференциальный усилитель 23 усиливает разность напряжений между сигналами W0- и W0+ обнаружения W-фазы, которые вводятся из датчика 13, и выводит усиленный сигнал Hw0 обнаружения на секцию 30 оценивания положения.
[0039] Далее будут описаны примеры сигналов Hu0, Hv0 и Hw0 обнаружения, которые выводятся из секции 20 усиления. На фиг. 3 показана диаграмма, демонстрирующая примеры сигналов Hu0, Hv0 и Hw0 обнаружения, которые выводятся из секции 20 усиления согласно настоящему варианту осуществления. На фиг. 3, горизонтальная ось представляет угол поворота ротора [градусы]. Вертикальная ось представляет величину сигнала.
[0040] В примере, показанном на фиг. 3, период E1 из углов Θ101 - Θ113 поворота ротора представляет один цикл электрического угла. Каждый из периода E2 из углов Θ113 - Θ114 поворота ротора, периода E3 из углов Θ114 - Θ115 поворота ротора, периода E4 из углов Θ115 - Θ116 поворота ротора, периода E5 из углов Θ116 - Θ117 поворота ротора и периода E6 из углов Θ117 - Θ118 поворота ротора представляет один цикл электрического угла. Период K1, который охватывает периоды E1 - E6, представляет один цикл механического угла. Другими словами, период, эквивалентный одному циклу электрического угла, равен периоду, определенному делением периода, эквивалентного одному циклу механического угла, на количество пар полюсов.
[0041] В примере, показанном на фиг. 3, сигнал Hu0 обнаружения достигает локальных максимумов A3 [В]. Сигнал Hw0 обнаружения достигает локальных максимумов PeakHw [В], которые меньше, чем значение напряжения A3. Сигнал Hv0 обнаружения достигает локальных максимумов PeakHv [В], которые меньше, чем значение напряжения PeakHw. Таким образом, вследствие ошибок монтажа датчиков 11-13 и различия в чувствительности от датчика к датчику, амплитуды сигналов Hu0, Hv0 и Hw0 обнаружения изменяются. Кроме того, сигналы Hu0, Hv0 и Hw0 имеют, соответственно, разные значения центрального напряжения. Другими словами, каждый из сигналов Hu0, Hv0 и Hw0 имеет компоненту смещения.
[0042] Далее, со ссылкой на фиг. 1, будет подробно описана конструкция секции 30 оценивания положения.
[0043] Секция 30 оценивания положения включает в себя секцию 31 AD-преобразования, секцию 32 вычисления положения и секцию 33 хранения. Секция 31 AD-преобразования преобразует сигналы обнаружения, вводимые из секции 20 усиления, которые являются аналоговыми сигналами, в сигналы обнаружения, которые являются цифровыми сигналами, и выводит цифровые сигналы обнаружения, полученные в результате преобразования, на секцию 32 вычисления положения. В частности, она включает в себя схему 311 AD-преобразования, схему 312 AD-преобразования и схему 313 AD-преобразования. Схема 311 AD-преобразования преобразует сигнал Hu0 обнаружения, который является аналоговым сигналом, в сигнал Hu0' обнаружения, который является цифровым сигналом, для вывода на секцию 32 вычисления положения. Схема 312 AD-преобразования преобразует сигнал Hv0 обнаружения, который является аналоговым сигналом, в сигнал Hv0' обнаружения, который является цифровым сигналом, для вывода на секцию 32 вычисления положения. Схема 313 AD-преобразования преобразует сигнал Hw0 обнаружения, который является аналоговым сигналом, в сигнал Hw0' обнаружения, который является цифровым сигналом, для вывода на секцию 32 вычисления положения. Секция 33 хранения сохраняет информацию, подлежащую использованию в оперативной обработке. Оперативная обработка является процессом, подлежащим осуществлению в реальном времени при вращении ротора R. Ниже будет описана информация, подлежащая сохранению в секции 33 хранения.
[0044] Как описано выше, преобразование сигнала обнаружения в сигнал, пригодное для обработки в секции 32 вычисления положения, может именоваться "предобработкой". Секция 31 AD-преобразования является примером схемы, которая осуществляет предобработку. Секция 32 вычисления положения также может включать в себя схемы, которые осуществляют любую другую предобработку.
[0045] Для сигналов Hu0', Hv0' и Hw0' обнаружения, которые являются цифровыми сигналами, полученными в результате преобразования секцией 31 AD-преобразования, горизонтальная ось представляет угол поворота ротора [градусы]; и вертикальная ось представляет величину цифрового значения. Секция 32 вычисления положения включает в себя секцию 321 обнаружения пересечения, секцию 322 обнаружения подразделения и секцию 323 соединения сегментов линии. Секция 321 обнаружения пересечения обнаруживает пересечение между сигналами обнаружения и также пересечение нулевого уровня между сигналом обнаружения и опорным значением. Другими словами, между пересечением и другим пересечением, которое является смежным для этого пересечения, секция 321 обнаружения пересечения последовательно обнаруживает каждое пересечение нулевого уровня, на котором потенциал сигнала обнаружения пересекает опорное напряжение. Опорное значение является значением, соответствующим цифровому значению 0. Секция 321 обнаружения пересечения выводит информацию, представляющую координаты обнаруженных пересечений, и информацию, представляющую координаты пересечений нулевого уровня, на секцию 322 обнаружения подразделения. Таким образом, информация, представляющая координаты пересечений и пересечений нулевого уровня, является информацией, которая выражается в отношении углов поворота ротора и величин цифровых значений. Используя информацию, представляющую координаты пересечения, и информацию, представляющую координаты пересечения нулевого уровня, которые вводятся из секции 321 обнаружения пересечения, секция 322 обнаружения подразделения обнаруживает любой сигнал обнаружения между пересечением и пересечением нулевого уровня, в качестве сигнала подразделения. Секция 322 обнаружения подразделения выводит информацию, представляющую обнаруженные сигналы подразделения, на секцию 323 соединения сегментов линии. Используя информацию, представляющую сигналы подразделения, которые вводится из секции 322 обнаружения подразделения, секция 323 соединения сегментов линии последовательно соединяет сигналы подразделения. В данном случае, информация, представляющая сигнал подразделения, является информацией, которая выражается углом поворота ротора и величиной цифрового значения, из начального положения в конечное положение сигнала подразделения, образующего часть сигнала обнаружения.
[0046] Как описано выше, работа системы 1 управления двигателем согласно настоящему варианту осуществления включает в себя этап обнаружения пересечения, этап обнаружения подразделения и этап соединения сегментов линии. На этапе обнаружения пересечения секция 321 обнаружения пересечения последовательно обнаруживает пересечение, на котором каждый сигнал обнаружения, выводимый на этапе обнаружения сигнала, пересекает другой. На этапе обнаружения подразделения секция 322 обнаружения подразделения обнаруживает участок сигнала обнаружения, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, в качестве одного или более сигналов подразделения. На этапе соединения сегментов линии секция 323 соединения сегментов линии последовательно соединяет сигналы подразделения и оценивает положение подвижной части на основании множественных соединенных сигналов подразделения, для генерации сигнала оцененного значения положения.
[0047] Далее, после схематического описания порядка обработки, осуществляемой секцией 30 оценивания положения, будет подробно описан порядок обработки, осуществляемой секцией 30 оценивания положения.
[0048] Сначала, со ссылкой на фиг. 4, будет схематически описан порядок обработки, осуществляемой секцией 30 оценивания положения. На фиг. 4 показана блок-схема операций, демонстрирующая процедуру обработки, осуществляемой секцией 30 оценивания положения согласно настоящему варианту осуществления. Заметим, что секция 30 оценивания положения осуществляет следующие процессы посредством оперативной обработки.
(Этап S101) Секция 321 обнаружения пересечения получает сигналы Hu0', Hv0' и Hw0' обнаружения, вводимые из секции 31 AD-преобразования.
(Этап S102) Используя значения, соответственно, принимаемые сигналами Hu0', Hv0' и Hw0' обнаружения, полученными на этапе S101, секция 321 обнаружения пересечения последовательно обнаруживает пересечения и пересечения нулевого уровня. Далее, секция 321 обнаружения пересечения последовательно выводит информацию, представляющую координаты обнаруженных пересечений и пересечений нулевого уровня и входные сигналы Hu0', Hv0' и Hw0' обнаружения на секцию 322 обнаружения подразделения.
(Этап S103) Секция 322 обнаружения подразделения обнаруживает участок сигнала обнаружения от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения, т.е. частичный сигнал обнаружения от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения, в качестве первого сигнала подразделения. Альтернативно, секция 322 обнаружения подразделения обнаруживает участок сигнала обнаружения от пересечения нулевого уровня до пересечения, которое является смежным для этого пересечения нулевого уровня, т.е. частичный сигнал обнаружения от пересечения нулевого уровня до пересечения, которое является смежным для этого пересечения нулевого уровня, в качестве второго сигнала подразделения.
(Этап S104) Если ротор R совершает вращение CW, секция 323 соединения сегментов линии последовательно соединяет, в направлении вперед, сигналы подразделения, вводимые из секции 322 обнаружения подразделения в течение одного цикла механического угла.
(Этап S105) Секция 30 оценивания положения оценивает механическое положение на основании сигналов подразделения, соединенных секцией 323 соединения сегментов линии, таким образом, оценивая механический угол Θ^.
[0049] Секция 30 оценивания положения повторяет процессы этапов S101 - S105 для каждого цикла управления. Цикл управления может быть, например, любым из соответствующих циклов управления током (крутящим моментом), скоростью или управления положением. В нижеследующем описании, процессы, осуществляемые на этапах S102 - S105, представленных на фиг. 4, могут совместно именоваться процессом этапа S110.
[0050] Далее будет подробно описан порядок обработки, осуществляемой секцией 30 оценивания положения. Сначала, со ссылкой на фиг. 4, будет описан процесс, осуществляемый секцией 321 обнаружения пересечения на этапе S101.
[0051] При вращении ротора R, секция 321 обнаружения пересечения получает сигналы Hu0', Hv0' и Hw0' обнаружения, которые, соответственно, вводятся из схем 311-313 AD-преобразования. Сигнал Hu0' обнаружения, сигнал Hv0' обнаружения и сигнал Hw0' обнаружения, которые выводятся из секции 31 AD-преобразования, будут описаны со ссылкой на фиг. 5.
[0052] На фиг. 5 показана диаграмма, описывающая примеры сигналов Hu0', Hv0' и Hw0' обнаружения, которые выводятся секцией 31 AD-преобразования согласно настоящему варианту осуществления. На фиг. 5, горизонтальная ось представляет угол поворота ротора [градусы]. Вертикальная ось представляет цифровое значение. Формы волны Hu0', Hv0' и Hw0', показанные на фиг. 5, являются диаграммами формы волны, представляющими сигналы обнаружения, преобразованные в цифровые сигналы схемами 311-313 AD-преобразования. Например, когда количество битов секции 31 AD-преобразования равно 12 битам, диапазон значений цифрового сигнала составляет от +2047 до -2048. На фиг. 5, период E1 углов Θ101 - Θ113 поворота ротора эквивалентен одному циклу электрического угла.
[0053] Возвращаясь к фиг. 4, будет подробно описан процесс обнаружения пересечений и пересечений нулевого уровня, который осуществляется секцией 321 обнаружения пересечения на этапе S102.
[0054] Секция 321 обнаружения пересечения получает сигналы Hu0', Hv0' и Hw0' обнаружения, которые выводятся из секции 31 AD-преобразования. Секция 321 обнаружения пересечения последовательно обнаруживает пересечение между полученными сигналами обнаружения, которое вычисляется из координат двух выборочных точек. Кроме того, секция 321 обнаружения пересечения последовательно обнаруживает пересечение нулевого уровня между полученным сигналом обнаружения и опорным значением. Координаты такого пересечения или пересечения нулевого уровня задаются углом поворота ротора на горизонтальной оси и цифровым значением на вертикальной оси. Секция 321 обнаружения пересечения обнаруживает координаты пересечений, и выводит информацию, представляющую обнаруженные координаты пересечений, на секцию 322 обнаружения подразделения. Кроме того, секция 321 обнаружения пересечения обнаруживает координаты пересечений нулевого уровня и выводит информацию, представляющую обнаруженные координаты пересечений нулевого уровня, на секцию 322 обнаружения подразделения. Кроме того, секция 321 обнаружения пересечения выводит полученные сигналы Hu0', Hv0' и Hw0' обнаружения на секцию 322 обнаружения подразделения.
[0055] Далее будет подробно описан процесс обнаружения сигнала подразделения, который осуществляется секцией 322 обнаружения подразделения на этапе S103 на фиг. 4.
[0056] Секция 322 обнаружения подразделения последовательно получает информацию, представляющую координаты пересечений, информацию, представляющую координаты пересечений нулевого уровня, и сигналы Hu0', Hv0' и Hw0' обнаружения, которые были введены из секции 321 обнаружения пересечения. Из полученных сигналов обнаружения, секция 322 обнаружения подразделения обнаруживает любой сигнал обнаружения от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения в качестве первого сигнала подразделения. Из полученных сигналов обнаружения, секция 322 обнаружения подразделения обнаруживает любой сигнал обнаружения от пересечения нулевого уровня до пересечения, которое является смежным для этого пересечения нулевого уровня в качестве второго сигнала подразделения. Секция 322 обнаружения подразделения последовательно выводит обнаруженные сигналы подразделения на секцию 323 соединения сегментов линии. В данном случае, в качестве информации, представляющей первый сигнал подразделения, секция 322 обнаружения подразделения обнаруживает информацию расхождения в цифровом значении и расхождения в угле поворота ротора от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения.
[0057] Далее будут поочередно описаны конкретные примеры пересечений, пересечений нулевого уровня и сигналов подразделения.
[0058] Сначала, со ссылкой на фиг. 6A, будут описаны конкретные примеры пересечений и пересечений нулевого уровня, подлежащих обнаружению секцией 321 обнаружения пересечения.
[0059] На фиг. 6A показана диаграмма, описывающая относительные величины, пересечения, пересечения нулевого уровня и сигнал подразделения, связанный с тремя сигналами Hu0', Hv0' и Hw0' обнаружения, согласно настоящему варианту осуществления. На фиг. 6A, горизонтальная ось представляет угол поворота ротора [градусы]. Вертикальная ось представляет цифровое значение. Кроме того, на фиг. 6A показана диаграмма, демонстрирующая увеличенный период E1 углов Θ101 - Θ113 поворота ротора на фиг. 5.
[0060] На фиг. 6A, каждая из точек cp1 - cp7 обозначает пересечение. Используемый здесь термин "пересечение" обозначает точку, в которой два сигнала обнаружения пересекаются друг с другом. Например, пересечение cp1 при угле Θ101 поворота ротора является точкой, в которой сигнал Hu0' обнаружения и сигнал Hv0' обнаружения пересекаются друг с другом.
[0061] Кроме того, точки zc1 - zc6 обозначают пересечение нулевого уровня. Используемый здесь термин "пересечение нулевого уровня" является точкой, в которой любой из сигналов Hu0', Hv0' и Hw0' обнаружения пересекает опорное значение в цифровом значении. Например, пересечение нулевого уровня zc1 при угле Θ102 поворота ротора является точкой, в которой сигнал Hu0' обнаружения пересекает опорное значение.
[0062] Далее конкретные примеры сигналов подразделения подлежащий обнаружению секцией 322 обнаружения подразделения будут описаны со ссылкой на фиг. 6A. В дальнейшем, сегмент означает каждый отдельный сигнал подразделения. Период, охватывающий сегмент, проходит от начальной точки к конечной точке каждого сигнала подразделения. Сегменты образуют 12 периодов в течение одного цикла электрического угла. Когда количество пар полюсов в двигателе M равно 6, шесть циклов электрического угла соответствует одному циклу механического угла; таким образом, сегменты образуют 72 периода в течение одного цикла механического угла. Секция относится к порядковому номеру, от 1 до 12, каждого сигнала подразделения в течение одного цикла электрического угла. Сигнал подразделения представляет собой сигнал обнаружения от пересечения cp(n) до пересечения нулевого уровня zc(m), которое является смежным для этого пересечения cp(n) на фиг. 6A. Альтернативно, он является сигналом обнаружения от пересечения нулевого уровня zc(m) до пересечения cp(n+1), которое является смежным для этого пересечения нулевого уровня zc(m). Заметим, что n является целым числом от 1 до 7, и m является целым числом от 1 до 6. В частности, например, участок сигнала Hu0' обнаружения от пересечения cp1 до пересечения нулевого уровня zc1 является сигналом sg101 подразделения. Участок сигнала Hu0' обнаружения от пересечения нулевого уровня zc1 до пересечения cp2 является сигналом sg102 подразделения. На фиг. 6A, период от Θ101 до Θ102, т.е. период сигнала sg101 подразделения, соответствует периоду, охватывающий сегмент номер 1. Соответствующие периоды сигналов sg102 - sg112 подразделения соответствуют периодам, охватывающим сегменты с номерами 2-12.
[0063] В примере, показанном на фиг. 6A, сигналы Hu0', Hv0' и Hw0' обнаружения являются синусоидальными волнами; таким образом, сигналы sg101 - sg112 подразделения являются сигналами, охватывающими диапазоны, в синусоидальных волнах, которое больше напоминают линии, чем любой другой участок.
[0064] Теперь, со ссылкой на фиг. 6A, будут описано относительные величины трех сигналов Hu0', Hv0' и Hw0' обнаружения.
[0065] Например, в течение периода углов Θ101 - Θ103 поворота ротора, который является периодом, охватывающим сегмент 1 и сегмент 2, цифровое значение сигнала Hw0' обнаружения является наибольшим из трех сигналов обнаружения. Сигнал Hu0' обнаружения имеет следующее после наибольшего цифровое значение по отношению к сигналу Hw0' обнаружения. Сигнал Hv0' обнаружения имеет наименьшее цифровое значение. Кроме того, в течение периода углов Θ101 - Θ102 поворота ротора, который является периодом, охватывающим сегмент 1, цифровое значение сигнала Hu0' обнаружения меньше опорного значения. В течение периода углов Θ102 - Θ103 поворота ротора, который является периодом, охватывающим сегмент 2, цифровое значение сигнала Hu0' обнаружения больше опорного значения.
[0066] Также для сегментов 3-12, относительные величины трех сигналов Hu0', Hv0' и Hw0' обнаружения хранятся в секции 33 хранения, в отношении каждого сегмента.
[0067] Таким образом, в течение одного цикла электрического угла, относительные величины трех сигналов Hu0', Hv0' и Hw0' обнаружения и их относительные величины относительно опорного значения в каждом сегменте хранятся в секции 33 хранения.
[0068] Далее будет подробно описан процесс соединения сигналов подразделения, который осуществляется секцией 323 соединения сегментов линии на этапе S104 на фиг. 4.
[0069] Секция 323 соединения сегментов линии последовательно соединяет сигналы подразделения из секции 322 обнаружения подразделения. В данном случае, секция 323 соединения сегментов линии соединяет сигналы подразделения в одном и том же положительном или отрицательном направлении цифрового значения, в соответствии с пересечениями или пересечениями нулевого уровня, относительными величинами сигналов Hu0', Hv0' и Hw0' обнаружения, и их относительными величинами относительно опорного значения.
[0070] В частности, для каждого сегмента, секция 323 соединения сегментов линии выделяет сигнал обнаружения, который ранжируется посередине (который также именуется промежуточным сигналом) (например, второй после наибольшего (наименьшего) в примере, приведенном на фиг. 6A) в отношении относительных величин цифровых значений сигналов Hu0', Hv0' и Hw0' обнаружения. Секция 323 соединения сегментов линии производит сравнение относительной величины между каждым выделенным промежуточным сигналом в цифровом значении и сигналом обнаружения в непосредственно предыдущем пересечении или пересечении нулевого уровня в цифровом значении (которое также именуется значением сигнала точки пересечения). В данном случае предполагается, что непосредственно предыдущее пересечение или пересечение нулевого уровня непосредственно предшествует промежуточному сигналу в направлении угла поворота ротора, как пересечение cp1 непосредственно предшествует сигналу sg101 подразделения, или как пересечение нулевого уровня zc1 непосредственно предшествует сигналу sg102 подразделения, в примере, приведенном, например, на фиг. 6A.
[0071] Рассмотрим сигнал sg102 подразделения. Если определено, что цифровое значение промежуточного сигнала sg102 больше или равно непосредственно предыдущему значению сигнала точки пересечения zc1, то секция 323 соединения сегментов линии прибавляет значение, полученное вычитанием непосредственно предыдущего значения сигнала точки пересечения zc1 из цифрового значения промежуточного сигнала sg102, к непосредственно предыдущему значению сигнала точки пересечения zc1. С другой стороны, если определено, что цифровое значение промежуточного сигнала sg102 меньше непосредственно предыдущего значения сигнала точки пересечения zc1, то секция 323 соединения сегментов линии прибавляет значение, полученное вычитанием цифрового значения промежуточного сигнала sg102 из непосредственно предыдущего значения сигнала точки пересечения zc1. Секция 323 соединения сегментов линии повторяет это добавление в порядке увеличения углов поворота ротора. В результате, секция 323 соединения сегментов линии получает возможность соединять сигналы подразделения в положительном направлении цифровых значений (см. фиг. 6B).
[0072] Заметим, что секция 323 соединения сегментов линии может добавлять разность, т.е. абсолютное значение, между цифровым значением промежуточного сигнала и непосредственно предыдущим значением сигнала точки пересечения.
[0073] Поскольку двигатель M включает в себя 6 пар полюсов, конечная точка сигнала sg112' подразделения соответствует механическому углу 60°. Конечная точка сигнала sg124' подразделения соответствует механическому углу 120°. Конечная точка сигнала sg136' подразделения соответствует механическому углу 180°. Конечная точка сигнала sg148' подразделения соответствует механическому углу 240°. Конечная точка сигнала sg160' подразделения соответствует механическому углу 300°. Конечная точка сигнала sg172' подразделения соответствует механическому углу 360°.
[0074] Опишем конкретный пример соединения сигналов подразделения, которые составляют один цикл электрического угла, осуществляемого секцией 323 соединения сегментов линии.
[0075] На фиг. 6B показана диаграмма, описывающая соединение сигналов подразделения, которые составляют один цикл электрического угла согласно настоящему варианту осуществления. На диаграмме, показанной на фиг. 6B, сигналы sg101' - sg112' подразделения, относящиеся к периоду E1 на фиг. 6A, соединяются. На фиг. 6B, горизонтальная ось представляет угол поворота ротора [градусы]. Вертикальная ось представляет цифровое значение. Пример, показанный на фиг. 6B, является примером, где ротор R совершает вращение CW. На фиг. 6B, сигналы sg101' - sg112' подразделения являются сигналами, полученными в результате соединения сигналов sg101 - sg112 подразделения друг с другом секцией 323 соединения сегментов линии на фиг. 6A. Точки p101 - p113 являются точками, заменяющими пересечения cp1 - cp7 и пересечения нулевого уровня zc1 - zc6 на фиг. 6A. Кривая g132 представляет собой кривую, полученную соединением друг с другом сигналов sg101' - sg112' подразделения.
[0076] В дальнейшем, под направлением вперед будем понимать направление, в котором цифровое значение возрастает с увеличением угла поворота ротора. Секция 323 соединения сегментов линии заменяет пересечение cp1 точкой p101, например. Секция 323 соединения сегментов линии соединяет сигнал sg101' подразделения в направлении вперед. В частности, секция 323 соединения сегментов линии заменяет сигнал sg101 подразделения на фиг. 6A сигналом sg101' подразделения, начальной точкой которого является точка p101, и конечной точкой является точка p102. Кроме того, секция 323 соединения сегментов линии заменяет пересечение нулевого уровня zc1 точкой p102.
[0077] Кроме того, секция 323 соединения сегментов линии соединяет сигнал sg102' подразделения в направлении вперед. В частности, сигнал sg101 подразделения на фиг. 6A заменяется сигналом sg102' подразделения, начальной точкой которого является точка p102 и конечной точкой является точка p103. Кроме того, секция 323 соединения сегментов линии заменяет пересечение cp2 точкой p103.
[0078] Как указано кривой g132 на фиг. 6B, секция 323 соединения сегментов линии соединяет сигналы sg101' - sg112' подразделения, показанные на фиг. 6A, последовательно в направлении вперед. В результате, пересечение cp1 при угле Θ101 поворота ротора заменяется цифровым значением 0. Кроме того, секция 323 соединения сегментов линии заменяет пересечение cp7 при угле Θ113 поворота ротора цифровым значением 1200. На фиг. 6B, цифровое значение 12000 соответствует 360°, образующим один цикл электрического угла.
[0079] Конкретный пример соединения сигналов подразделения в течение одного цикла механического угла, посредством работы секции 323 соединения сегментов линии, будет описан со ссылкой на фиг. 7.
[0080] В первом цикле E1 секция 323 соединения сегментов линии последовательно соединяет сигналы sg101 - sg112 подразделения на фиг. 6A в направлении вперед, в течение одного цикла электрического угла. В результате, как указано сигналами sg101' - sg112' подразделения на фиг. 6B, сигналы sg101 - sg112 подразделения на фиг. 6A соединяются.
[0081] Далее, во втором цикле E2, к конечной точке сигнала sg112' подразделения, секция 323 соединения сегментов линии присоединяет начальную точку сигнала sg113' подразделения второго цикла E2. Затем секция 323 соединения сегментов линии соединяет сигналы sg113 - sg124 подразделения, которые составляют один цикл электрического угла, в направлении вперед. В результате, как указано сигналами sg113' - sg124' подразделения на фиг. 7, сигналы sg113 - sg124 подразделения соединяются.
[0082] После этого, к конечной точке сигнала sg124' подразделения второго цикла E2, секция 323 соединения сегментов линии присоединяет начальную точку сигнала подразделения sg125' третьего цикла E3. Далее, к конечной точке сигнала sg136' подразделения третьего цикла E3, секция 323 соединения сегментов линии присоединяет начальную точку сигнала подразделения sg137' четвертого цикла E4. Далее, к конечной точке сигнала sg148' подразделения четвертого цикла E4, секция 323 соединения сегментов линии присоединяет начальную точку сигнала подразделения sg149' пятого цикла E5. Далее, к конечной точке сигнала sg160' подразделения пятого цикла E5, секция 323 соединения сегментов линии присоединяет начальную точку сигнала подразделения sg161' шестого цикла E6.
[0083] На фиг. 7 показана диаграмма, описывающая иллюстративный результат соединения сигналов подразделения, которые составляют один цикл механического угла, согласно настоящему варианту осуществления. Как показано на фиг. 7, каждый цикл электрического угла содержит 12 сигналов подразделения. Первый цикл E1 содержит сигналы sg101' - sg112' подразделения. Второй цикл E2 содержит сигналы sg113' - sg124' подразделения. Третий цикл E3 содержит сигналы sg125' - sg136' подразделения. Четвертый цикл E4 содержит сигналы sg137' - sg148' подразделения. Пятый цикл E5 содержит сигналы sg149' - sg160' подразделения. Шестой цикл E6 содержит сигналы sg161' - sg172' подразделения.
[0084] Таким образом, цикл K1, эквивалентный одному циклу механического угла, содержит 72 сигнала sg101' - sg172' подразделения.
[0085] Далее будет описан процесс генерации механического угла, который осуществляется секцией 30 оценивания положения на этапе S105 на фиг. 4. В данном случае будет описан механический угол в данной точке на sg102'. Механические угловые положения sg102' заключены в периоде E1 на фиг. 7, увеличенная диаграмма этого периода E1 приведена на фиг. 6B. Секция 323 соединения сегментов линии прибавляет значение, полученное вычитанием непосредственно предыдущего значения сигнала точки пересечения zc1 из цифрового значения промежуточного сигнала, к непосредственно предыдущему значению сигнала точки пересечения zc1. Кроме того, как описано выше, секция 323 соединения сегментов линии заменяет значение сигнала точки пересечения zc1 точкой p102. Затем, к точке p102, секция 323 соединения сегментов линии прибавляет значение, полученное вычитанием непосредственно предыдущего значения сигнала точки пересечения zc1 из цифрового значения промежуточного сигнала. На основании длины сегментов линии сигналов подразделения, соединенных секцией 323 соединения сегментов линии, секция 30 оценивания положения оценивает механическое угловое положение ротора.
[0086] Конкретные примеры информации, подлежащей сохранению в секции 33 хранения, будут описаны.
[0087] Секция 33 хранения сохраняет соотношение между номерами пар полюсов, секций и сегментов. Кроме того, секция 33 хранения сохраняет относительные величины трех сигналов Hu0', Hv0' и Hw0' обнаружения для каждой секции. Относительные величины сигналов Hu0', Hv0' и Hw0' обнаружения и их относительные величины относительно опорного значения используются для определения порядковых номеров секций.
[0088] В способе оценивания положения согласно настоящему варианту осуществления, сигнал обнаружения делится на два сегменты на пересечении нулевого уровня. В результате, один оборот механического угла содержит 72 сигнала подразделения. Следовательно, в способе оценивания положения согласно настоящему варианту осуществления, один сигнал подразделения имеет малую длину. Это позволяет приближать объединенные сигналы подразделения к более идеальному линейному сигналу, который пропорционален углам. Кроме того, в способе оценивания положения согласно настоящему варианту осуществления, положения (в качестве угловой информации ротора R) получаются на основании сигналов подразделения нелинейных форм. Поскольку секция 30 оценивания положения оценивает положение ротора R с использованием соединенных таким образом сегментов линии, настоящий вариант осуществления позволяет достигать весьма точного обнаружения положения, без необходимости в высокоточном оптическом датчике положения.
[0089] Система 1 управления двигателем способна осуществлять управление положением с использованием механического угла Θ^, оцененного таким образом. В результате, в способе оценивания положения согласно настоящему варианту осуществления, секция обнаружения для обнаружения положения ротора R не требует никакого датчика положения, который подвергается влиянию окружающей среды. Это позволяет уменьшить размер двигателя и избегать влияния окружающей среды, например, частиц пыли, на точность управления положением.
[0090] Варианты
Хотя настоящий вариант осуществления описан как пример, где обнаруживаются пересечения и пересечения нулевого уровня, и любой сигнал обнаружения между пересечением и пересечением нулевого уровня обнаруживается в качестве сигнала подразделения, это не является ограничением.
[0091] Например, секция 322 обнаружения подразделения может выделять любой сигнал обнаружения от пересечения до пересечения, которое является смежным для этого пересечения, в качестве сигнала подразделения. Затем секция 322 обнаружения подразделения может подразделять выделенный сигнал подразделения на два сигнала подразделения на пересечении нулевого уровня, который располагается между пересечением и пересечением, которое является смежным для этого пересечения.
[0092] Хотя настоящий вариант осуществления описан как пример, где секция 32 вычисления положения применяет соответствующие процессы к сигналам Hu0', Hv0' и Hw0' обнаружения, преобразованным в цифровые сигналы, это не является ограничением. Например, секция 32 вычисления положения может применять соответствующие процессы к сигналам Hu0, Hv0 и Hw0 обнаружения как к аналоговым сигналам.
[0093] В настоящем варианте осуществления, способ возбуждения двигатель M может быть методом векторного управления или, например, любым другим методом возбуждение. Другие способы возбуждения могут быть, например, методами возбуждения с использованием 120-градусных прямоугольных волн или синусоидальных волн.
[0094] Хотя в настоящем варианте осуществления в порядке примера описан 12-полюсный двигатель M, это не является ограничением. В двигателе M может существовать, например, 2 полюса, 4 полюса, 8 полюсов и т.д. Например, в случае 8-полюсного двигателя, один цикл механического угла содержит сигналы подразделения, которые составляют четыре цикла электрического угла. В этом случае, если секция обнаружения выводит трехфазные сигналы обнаружения, один цикл электрического угла содержит 12 сигналов подразделения; таким образом, один цикл механического угла содержит 48 (=12×4) сигналов подразделения. В случае 8-полюсного двигателя, если ротор R совершает вращение CW, секция 323 соединения сегментов линии может последовательно объединять 48 сигналов подразделения, которые составляют один цикл механического угла, в направлении вперед.
[0095] Если на этапе S104 на фиг. 4 ротор R совершает вращение CCW, секция 323 соединения сегментов линии может соединять сигналы подразделения, которые составляют один цикл механического угла, в направлении назад. Используемый здесь термин CCW означает вращение против часовой стрелки при наблюдении со стороны выходного вала. Направление назад это направление, в котором цифровое значение уменьшается с увеличением угла поворота ротора. Секция 323 соединения сегментов линии может последовательно соединять соединенные сигналы подразделения, которые составляют один цикл механического угла, в направлении убывания от 360° до 0°, с увеличением угла поворота ротора. В этом случае, когда происходит изменение относительных величин трех сигналов Hu0', Hv0' и Hw0' обнаружения, сохраненных в секции 33 хранения, секция 30 оценивания положения определяет, совершает ли ротор R вращение CW или вращение CCW.
[0096] В результате, согласно этому варианту осуществления, независимо от того, совершает ли ротор R вращение CW или вращение CCW, положение ротора R можно оценивать с хорошей точностью.
[0097] Соотношение между направлением вращения и сигналами обнаружения будет описано со ссылкой на фиг. 6A.
[0098] Если текущее положение находится между углами Θ105 и Θ107 поворота ротора, секция 30 оценивания положения предписывает секции 33 хранения сохранять цифровое значение, отложенное по вертикальной оси в текущем положении, и цифровое значение, отложенное по вертикальной оси при угле Θ105 поворота ротора, который является, например, непосредственно предыдущим пересечением.
[0099] В случае, когда ротор R совершает вращение CW, положение ротора R будет переходить в положение между углами Θ107 и Θ109 поворота ротора. Секция 30 оценивания положения определяет переход в промежуточном сигнале при переключении от соотношения величин между углами Θ105 и Θ107 поворота ротора к соотношению величин между углами Θ107 и Θ109 поворота ротора и также при переключении от сигнала Hv0' обнаружения к сигналу Hu0' обнаружения, и определяет, является ли промежуточный сигнал после перехода положительным или отрицательным относительно опорного значения, таким образом, определяя, что ротор R совершает вращение CW. Затем секция 30 оценивания положения предписывает присоединять сигналы sg107 и sg108 подразделения между углами Θ107 и Θ109 поворота ротора к сигналу sg106 подразделения в направлении вперед.
[0100] С другой стороны, в случае, когда ротор R совершает вращение CCW, положение ротора R будет переходить в положение между углами Θ103 и Θ105 поворота ротора. Секция 30 оценивания положения определяет переход в промежуточном сигнале при переключении от соотношения величин между углами Θ105 и Θ107 поворота ротора к соотношению величин между углами Θ103 и Θ105 поворота ротора и также при переключении от сигнала Hv0' обнаружения к сигналу Hw0' обнаружения, и определяет, является ли промежуточный сигнал после перехода положительным или отрицательным относительно опорного значения, таким образом, определяя, что ротор R совершает вращение CCW. Затем секция 30 оценивания положения предписывает присоединять сигналы sg103 и sg104 подразделения между углами Θ103 и Θ105 поворота ротора к сигналу sg105 подразделения в направлении назад.
[0101] Хотя в настоящем варианте осуществления описаны генераторы Холла в порядке примера датчиков в секции 10 обнаружения, это не является ограничением. Датчики, используемые в секции 10 обнаружения, могут вырабатывать сигналы обнаружения, которые являются синусоидальными волнами, или выводить сигналы, которые основаны на синусоидальных волнах, но содержат гармоники. Например, датчики в секции 10 обнаружения могут быть датчиками на основе магниторезистивного эффекта.
[0102] В настоящем варианте осуществления описан пример выделения участка сигнала обнаружения от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения, или от пересечения нулевого уровня до пересечения, которое является смежным для этого пересечения нулевого уровня, в качестве сигнала подразделения; однако, это не является ограничением. Секция 322 обнаружения подразделения может генерировать сегмент линии от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения, или от пересечения нулевого уровня до пересечения, которое является смежным для этого пересечения нулевого уровня, таким образом, выделяя сигнал подразделения. Сегмент линии может быть прямой линией или, например участком синусоидальной волны.
[0103] Хотя в настоящем варианте осуществления проиллюстрирован пример внешнего ротора на фиг. 2, это не является ограничением. Двигатель M может быть щеточным двигателем, в котором башмаки входят в состав ротора R.
[0104] Кроме того, двигатель M может быть линейным двигателем. В случае, когда двигатель M является линейным двигателем, ротор R может быть, например, подвижной частью, включающей в себя магниты.
[0105] Хотя настоящий вариант осуществления описан как пример, где секция 10 обнаружения включает в себя три датчика 11-13, которые сдвинуты по фазе на 120 градусов, это не является ограничением. Количество датчиков в секции 10 обнаружения не ограничивается тремя. В этом случае, выходные сигналы датчиков могут быть сдвинуты по фазе на угол, определенный делением на суммарное количество датчиков.
[0106] Хотя настоящий вариант осуществления описан как пример, где секция 321 обнаружения пересечения обнаруживает пересечения и пересечения нулевого уровня, это не является ограничением. Секция 321 обнаружения пересечения может обнаруживать только пересечения. В этом случае, секция 322 обнаружения подразделения может последовательно обнаруживать участок сигнала обнаружения от пересечения до пересечения, которое является смежным для этого пересечения в качестве сигнала подразделения. В этом случае, количество сигналов подразделения, которые составляют один цикл электрического угла, равно шести. Когда количество пар полюсов в двигателе M равно шести, количество сигналов подразделения, которые составляют один цикл механического угла, равно 36.
[0107] Второй вариант осуществления
В настоящем варианте осуществления будет описан пример, где секция 30 оценивания положения согласно первому варианту осуществления дополнительно включает в себя секцию коррекции.
[0108] На фиг. 8 показана схема, демонстрирующая конструкцию системы 1A управления двигателем согласно настоящему варианту осуществления.
[0109] Как показано на фиг. 8, система 1A управления двигателем включает в себя секцию 30A оценивания положения, вместо секции 30 оценивания положения.
[0110] Секция 30A оценивания положения включает в себя секцию 32A вычисления положения вместо секции 32 вычисления положения, и включает в себя секцию 33A хранения вместо секции 33 хранения.
[0111] Кроме того, секция 32A вычисления положения включает в себя секцию 324 коррекции.
[0112] Секция 324 коррекции включает в себя секцию 3241 первой коррекции, секцию 3242 второй коррекции и секцию 3243 третьей коррекции. Помимо секции 31 AD-преобразования, секция 324 коррекции также функционирует как часть схемы предобработки.
[0113] При вращении ротора R, секция 3241 первой коррекции корректирует синфазный шум сигнала обнаружения каждой фазы и выводит скорректированный сигнал обнаружения на секцию 3242 второй коррекции. Заметим, что синфазный шум является шумовой компонентой, которая содержит сигнал обнаружения каждой фазы.
[0114] Как описано со ссылкой на фиг. 3, сигналы Hu0, Hv0 и Hw0 обнаружения имеют компоненты смещения. Кроме того, как описано со ссылкой на фиг. 3, существует изменения среди пиковых значений сигналов Hu0, Hv0 и Hw0 обнаружения. Пиковые значения являются локальными максимумами и локальными минимумами сигнала обнаружения. Секция 32A вычисления положения применяет каждый процесс к сигналу обнаружения в форме цифрового сигнала. Секция 3242 второй коррекции используется для эффективного использования динамического диапазона секции 32A вычисления положения. При вращении ротора R, корректируются изменения амплитуды из сигналов обнаружения и их компоненты смещения, и скорректированные сигналы обнаружения выводятся на секцию 3243 третьей коррекции.
[0115] Секция 3243 третьей коррекции используется для коррекции схематической S-формы сигнала подразделения в линию. Поскольку сигнал подразделения является участком сигнала обнаружения, он имеет схематическую S-форму. Таким образом, путем применения коррекции на секцию 3243 третьей коррекции, скорректированные сигналы обнаружения выводятся на секцию 321 обнаружения пересечения.
[0116] В секции 33A хранения дополнительно хранятся уравнения коррекции, подлежащие использованию секцией 324 коррекции для корректировок, а также значения и коэффициенты коррекции для использования в корректировках. Ниже будут описаны уравнения и коэффициенты коррекции.
[0117] Далее будет описана процедура процессов коррекции, подлежащих осуществлению секцией 32A вычисления положения.
[0118] Работа системы 1 управления двигателем согласно настоящему варианту осуществления включает в себя этап первой коррекции, этап второй коррекции и этап третьей коррекции.
[0119] На фиг. 9 показана блок-схема операций, демонстрирующая процедуру обработки, подлежащую осуществлению секцией 32A вычисления положения согласно настоящему варианту осуществления. В примере, показанном на фиг. 9, будет описан пример, где секция 324 коррекции осуществляет все корректировки с первой по третью. Кроме того, любой процесс, идентичен процессу, описанному со ссылкой на фиг. 7, будет обозначен идентичной позицией, и его описание будет опущено. Секция 30A оценивания положения осуществляет следующие процессы.
(Этап S201) Секция 3241 первой коррекции осуществляет первую коррекцию. Первая коррекция будет описана ниже.
(Этап S202) После первой коррекции, секция 3242 второй коррекции осуществляет вторую коррекцию. Вторая коррекция будет описана ниже.
(Этап S203) После второй коррекции, секция 3243 третьей коррекции осуществляет третью коррекцию. Третья коррекция будет описана ниже.
[0120] После процесса этапа S203, секция 324 коррекции осуществляет процесс этапа S110.
[0121] Таким образом, завершаются процессы, подлежащие осуществлению секцией 32A вычисления положения.
[0122] Объяснение первой коррекции
Далее будет описана процедура обработки первой коррекции, осуществляемая секцией 3241 первой коррекции на этапе S201 на фиг. 9.
[0123] На фиг. 10 показана блок-схема операций, демонстрирующая процедуру обработки первой коррекции согласно настоящему варианту осуществления.
(Этап S2011) Секция 3241 первой коррекции последовательно выбирает один из сигналов обнаружения U-фазы, V-фазы и W-фазы.
(Этап S2012) Используя уравнение коррекции, соответствующее выбранному сигналу обнаружения, секция 3241 первой коррекции осуществляет первую коррекцию. Уравнения коррекции являются уравнениями (1) - (3), которые будут описаны ниже. Например, при выборе сигнала обнаружения U-фазы на этапе S2011, секция 3241 первой коррекции осуществляет первую коррекцию с использованием уравнения (1).
(Этап S2013) Секция 3241 первой коррекции определяет, закончился ли процесс этапа S2012 для сигналов обнаружения всех фаз. Определив, что процесс этапа S2012 закончен для сигналов обнаружения всех фаз (этап S2013; Да), секция 3241 первой коррекции заканчивает процесс. Определив, что процесс этапа S2012 не закончен для сигналов обнаружения всех фаз (Этап S2013; Нет), секция 3241 первой коррекции переходит к процессу этапа S2014.
(Этап S2014) Секция 3241 первой коррекции выбирает сигнал обнаружения фазы, все еще подлежащий выбору, и возвращается к процессу этапа S2012.
[0124] Далее будет подробно описана первая коррекция, осуществляемая секцией 3241 первой коррекции.
[0125] Секция 3241 первой коррекции применяет первую коррекцию к трем сигналам Hu0', Hv0' и Hw0' обнаружения с использованием следующих уравнений (1) - (3).
Hiu0'=Hu0'-(Hv0'+Hw0')/2...(1)
Hiv0'=Hv0'-(Hu0'+Hw0')/2...(2)
Hiw0'=Hw0'-(Hu0'+Hv0')/2...(3)
В уравнении (1), Hiu0' является скорректированным значением, полученным в результате применения первой коррекции к сигналу Hu0' обнаружения. В уравнении (2), Hiv0' является скорректированным значением, полученным в результате применения первой коррекции к сигналу Hv0' обнаружения. В уравнении (3), Hiw0' является скорректированным значением, полученным в результате применения первой коррекции к сигналу Hw0' обнаружения. Как описано выше, на этапе первой коррекции, секция 324 коррекции последовательно выбирает один из сигналов обнаружения, и вычитает среднее значение других невыбранных сигналов обнаружения из выбранного сигнала обнаружения, благодаря чему, для каждого сигнала обнаружения, генерируется сигнал обнаружения, до которого скорректирован выбранный сигнал обнаружения.
[0126] Далее будут описаны результаты первой коррекции.
[0127] На фиг. 11 показана диаграмма формы волны иллюстративного результата осуществления первой коррекции согласно настоящему варианту осуществления. Диаграмма формы волны, показанная на фиг. 11, демонстрирует формы волны, полученные, после преобразования форм волны, показанных на фиг. 3, в цифровые сигналы, их коррекцией секцией 3241 первой коррекции с использованием уравнений (1) - (3). На фиг. 11, горизонтальная ось представляет угол поворота ротора [градусы]; вертикальная ось представляет цифровое значение. В случае, когда количество битов в секции 31 AD-преобразования равно 12 битам, B2 равно 2047, и -B2 равно -2048. Как показано на фиг. 11, посредством первой коррекции, секция 3241 первой коррекции способна снижать флуктуации цифрового значения каждого сигнала обнаружения. Таким образом, посредством первой коррекции, секция 3241 первой коррекции способна снижать синфазные шумы.
[0128] Теперь опишем причину способности снижения синфазных шумов.
[0129] Синфазный шумовой сигнал, обозначенный Hn0', происходит в каждом из трех сигналов обнаружения. Значение Hiu0' обнаружения после коррекции уравнением (1), в котором учтен синфазный шумовой сигнал Hn0', выражается нижеследующим уравнением (4).
[0130] Hiu0'=(Hu0'+Hn0')-{(Hv0'+Hn0')+(Hw0'+Hn0')}/2
=(Hu0'+Hn0')-{Hn0'+(Hv0'+Hw0')/2}
=Hu0'-(Hv0'+Hw0')/2...(4)
Как указано уравнением (4), синфазный шум Hn0' в сигнале обнаружения каждой фазы подавляется коррекцией согласно уравнению (1). Таким образом, первая коррекция может снижать синфазный шум.
[0131] Аналогично, синфазный шум сигнала Hv0' обнаружения может снижаться уравнением (2). Синфазный шум сигнала Hw0' обнаружения может снижаться уравнением (3).
[0132] В случае, когда двигатель M является четырехфазным, например, секция 3241 первой коррекции выбирает одну из четырех фаз сигналов обнаружения. Четырехфазные сигналы обнаружения являются U-фазой, V-фазой, W-фазой и Z-фазой. Далее, секция 3241 первой коррекции осуществляет первую коррекцию с использованием уравнения коррекции, которое соответствует выбранному сигналу обнаружения. Другими словами, в случае четырехфазного двигателя M, секция 3241 первой коррекции осуществляет первую коррекцию с использованием четырех уравнений коррекции для соответствующих фаз. Например, уравнение коррекции сигнала обнаружения U-фазы является нижеследующим уравнением (5).
Hiu0'=Hu0'-(Hv0'+Hw0'+Hz0')/3...(5)
[0133] Даже в случае двигателя, для которого секция обнаружения выводит четыре фазы сигналов обнаружения, секция 3241 первой коррекции способна снижать синфазные шумы посредством первой коррекции с использованием четырех уравнений коррекции для соответствующих фаз. Другими словами, согласно настоящему варианту осуществления, синфазные шумы может снижаться посредством первой коррекции с использованием уравнений коррекции в соответствии с количеством фаз.
[0134] Объяснение второй коррекции
Далее будет описана процедура обработки второй коррекции, осуществляемой секцией 3242 второй коррекции на этапе S202 на фиг. 9.
[0135] В одном цикле электрического угла секция 3242 второй коррекции последовательно выбирает один из сигналов обнаружения U-фазы, V-фазы и W-фазы. Далее секция 3242 второй коррекции применяет вторую коррекцию к сигналу обнаружения выбранной фазы, с использованием значения коррекции, хранящегося в секции 33A хранения, и уравнения коррекции, соответствующего сигналу обнаружения выбранной фазы. Уравнения коррекции являются описанными ниже уравнениями (6) - (11). Например, при выборе сигнала обнаружения U-фазы, секция 3242 второй коррекции осуществляет вторую коррекцию с использованием уравнений (6) и (7).
[0136] Далее, со ссылкой на фиг. 11, будут описаны локальные максимумы и локальные минимумы каждого сигнала обнаружения.
[0137] В дальнейшем, точка Hiu_max является примером локального максимума U-фазы. Точка Hiv_max является примером локального максимума V-фазы. Точка Hiw_max является примером локального максимума W-фазы. Точка Hiu_min является примером локального минимума U-фазы. Точка Hiv_min является примером локального минимума V-фазы. Точка Hiw_min является примером локального минимума W-фазы. В данном случае, bu, bv и bw являются значениями коррекции смещения для соответствующих фаз, хранящимися в секции 33A хранения.
[0138] Далее будет подробно описана вторая коррекция, осуществляемая секцией 3242 второй коррекции.
[0139] Для сигнала обнаружения каждой фазы, секция 3242 второй коррекции определяет, является ли его цифровое значение положительным или отрицательным. Используемый здесь термин "положительное цифровое значение" означает цифровое значение, которое больше 0 на фиг. 11. Отрицательное цифровое значение означает цифровое значение, которое меньше 0 на фиг. 11. Секция 3242 второй коррекции осуществляет коррекцию униформизации диапазона амплитуды, чтобы он укладывался в диапазон, ограниченный заранее определенным максимальным значением B2 и заранее определенным минимальным значением -B2.
[0140] К положительному цифровому значению сигнала Hiu0' обнаружения после коррекции, секция 3242 второй коррекции применяет вторую коррекцию согласно нижеследующему уравнению (6), с использованием информации, хранящейся в секции 33A хранения. К отрицательному цифровому значению сигнала Hiu0' обнаружения после коррекции, секция 3242 второй коррекции применяет вторую коррекцию согласно нижеследующему уравнению (7), с использованием информации, хранящейся в секции 33A хранения.
[0141] К положительному цифровому значению сигнала Hiv0' обнаружения после коррекции, секция 3242 второй коррекции применяет вторую коррекцию согласно нижеследующему уравнению (8), с использованием информации, хранящейся в секции 33A хранения. К отрицательному цифровому значению сигнала Hiv0' обнаружения после коррекции, секция 3242 второй коррекции применяет вторую коррекцию согласно нижеследующему уравнению (9), с использованием информации, хранящейся в секции 33A хранения.
[0142] К положительному цифровому значению сигнала Hiw0' обнаружения после коррекции, секция 3242 второй коррекции применяет вторую коррекцию согласно нижеследующему уравнению (10), с использованием информации, хранящейся в секции 33A хранения. К отрицательному цифровому значению сигнала Hiw0' обнаружения после коррекции, секция 3242 второй коррекции применяет вторую коррекцию согласно нижеследующему уравнению (11), с использованием информации, хранящейся в секции 33A хранения.
Hiu1(ppn)'=au_max(ppn)×(Hiu0'(ppn)+bu)...(6)
Hiu1(ppn)'=au_min(ppn)×(Hiu0'(ppn)+bu)...(7)
Hiv1(ppn)'=av_max(ppn)×(Hiv0'(ppn)+bv)...(8)
Hiv1(ppn)'=av_min(ppn)×(Hiv0'(ppn)+bv)...(9)
Hiw1(ppn)'=aw_max(ppn)×(Hiw0'(ppn)+bw)...(10)
Hiw1(ppn)'=aw_min(ppn)×(Hiw0'(ppn)+bw)...(11)
В уравнениях (6) и (7), Hiu1' является скорректированным значением, полученным в результате применения второй коррекции к сигналу обнаружения U-фазы. В уравнениях (8) и (9), Hiv1' является скорректированным значением, полученным в результате применения второй коррекции к сигналу обнаружения V-фазы. В уравнениях (10) и (11), Hiw1' является скорректированным значением, полученным в результате применения второй коррекции к сигналу обнаружения W-фазы.
[0143] В уравнениях (6) - (11) ppn представляет собой целое число от 1 до 6, которое является значением, представляющим пары магнитных полюсов. В уравнениях (6), (8) и (10) au_max(ppn), av_max(ppn) и aw_max(ppn) являются положительными значениями коррекции коэффициента усиления для положительных цифровых значений, соответствующих соответствующим парам магнитных полюсов, хранящихся в секции 33A хранения, в течение одного цикла электрического угла. В уравнениях (7), (9) и (11), au_min(ppn), av_min(ppn) и aw_min(ppn) являются отрицательными значениями коррекции коэффициента усиления для отрицательных цифровых значений, соответствующих соответствующим парам магнитных полюсов, хранящихся в секции 33A хранения, в течение одного цикла электрического угла. В уравнениях (6) - (11), bu, bv и bw являются значениями коррекции смещения для соответствующих фаз, хранящимися в секции 33A хранения.
[0144] Заметим, что au_max(ppn), av_max(ppn), aw_max(ppn), au_min(ppn), av_min(ppn) и aw_min(ppn) являются значениями коррекции для соответствующих пар полюсов. Таким образом, количество положительных значений коррекции коэффициента усиления равно 18 (=3 фазы × 6 пар полюсов). Аналогично, количество отрицательных значений коррекции коэффициента усиления равно 18.
[0145] Далее будут описаны результаты второй коррекции.
[0146] На фиг. 12 показана диаграмма формы волны, демонстрирующая иллюстративный результат осуществления второй коррекции согласно настоящему варианту осуществления. Диаграмма формы волны, показанная на фиг. 12, представляет собой форму волны, после второй коррекции, скорректированную секцией 3242 второй коррекции. На фиг. 12, горизонтальная ось представляет угол поворота ротора [градусы]; вертикальная ось представляет цифровое значение.
[0147] Как показано на фиг. 12, вторая коррекция корректирует компоненты смещения в сигналах обнаружения. Кроме того, посредством второй коррекции, диапазон амплитуды, по существу, униформизируется в диапазон +B2 от -B2. Посредством этой коррекции, секция 30B оценивания положения способна эффективно использовать доступный диапазон значений цифрового сигнала в каждом участке.
[0148] Таким образом, посредством второй коррекции, компоненты смещения обнаружения соответствующих фаз сигнала Hiu0', Hiv0' и Hiw0' могут снижаться, и можно регулировать амплитуду каждого полюса в каждой фазе.
[0149] Объяснение корректировок посредством оперативной (онлайн) обработки
Хотя настоящий вариант осуществления описан как пример, где положительные значения коррекции коэффициента усиления, отрицательные значения коррекции коэффициента усиления, и значения коррекции смещения хранятся в секции 33A хранения, это не является ограничением. Посредством оперативной обработки, секция 3242 второй коррекции может вычислять положительные значения коррекции коэффициента усиления, отрицательные значения коррекции коэффициента усиления и значения коррекции смещения. Например, секция 3242 второй коррекции может использовать сигналы обнаружения из непосредственно предыдущего цикла механического угла для вычисления положительных значений коррекции коэффициента усиления, отрицательных значений коррекции коэффициента усиления и значений коррекции смещения.
[0150] Далее будет описан этап вычисления для значений коррекции смещения, положительных значений коррекции коэффициента усиления и отрицательных значений коррекции коэффициента усиления, которое осуществляется секцией 3242 второй коррекции.
[0151] На фиг. 13 показана блок-схема операций, демонстрирующая процесс вычисления значений коррекции смещения, положительных значений коррекции коэффициента усиления и отрицательных значений коррекции коэффициента усиления согласно настоящему варианту осуществления.
(Этап S2021) Секция 3242 второй коррекции обнаруживает локальные максимумы и локальные минимумы каждой фазы, по шести циклам электрического угла.
(Этап S2022) В течение периода, эквивалентного шести циклам электрического угла, секция 3242 второй коррекции вычисляет значение коррекции смещения для каждой фазы. В частности, секция 3242 второй коррекции вычисляет средние значения максимальных значений амплитуды и минимальных значений амплитуды для каждой фазы, по шести циклам электрического угла. Из среднего значения максимальных значений амплитуды и среднего значения минимальных значений амплитуды, определенных для каждой фазы, вычисляется среднее между максимальным и минимальным значениями. Вычисленные средние между максимумом и минимумом значения являются значениями коррекции смещения bu, bv и bw для соответствующих фаз. То, что обозначается здесь шестью циклами электрического угла, является средним значением по последним шести последовательно прибывшим циклам электрического угла. Вместо среднего значения по шести циклам электрического угла, вычисление может базироваться на максимальном значении амплитуды и минимальном значении амплитуды на цикл электрического угла, в течение, по меньшей мере, двух циклов. Далее секция 3242 второй коррекции предписывает секции 33A хранения сохранять вычисленное значение коррекции смещения для каждой фазы.
(Этап S2023) В течение периода, эквивалентного одному циклу электрического угла, секция 3242 второй коррекции вычисляет положительное значение коррекции коэффициента усиления и отрицательное значение коррекции коэффициента усиления для каждой фазы и для каждой пары полюсов. Затем, для каждой фазы и каждой пары полюсов, подвергнутой вычислению, секция 3242 второй коррекции предписывает секции 33A хранения сохранять положительное значение коррекции коэффициента усиления и отрицательное значение коррекции коэффициента усиления.
[0152] На основании значений коррекции, сохраненных в секции 33A хранения посредством процессов, осуществляемых на этапах S2021 - S2023, и соответствующих уравнений (6) - (11), секция 3242 второй коррекции применяет вторую коррекцию к сигналам обнаружения, например, в течение следующего цикла электрического угла.
[0153] В случае, когда двигатель M является, например, четырехфазным, секция 3242 второй коррекции может вычислять значение коррекции смещения, положительные значения коррекции коэффициента усиления и отрицательные значения коррекции коэффициента усиления для каждой фазы. В случае, когда двигатель M является четырехфазным, существует четыре значения коррекции смещения. Каждое из количества положительных значений коррекции коэффициента усиления и количества отрицательных значений коррекции коэффициента усиления равно 24 (= четыре фазы × 6 пар полюсов). Как описано выше, работа системы 1 управления двигателем согласно настоящему варианту осуществления включает в себя этап обнаружения локального максимума/локального минимума, этап вычисления среднего, этап вычисления смещения, этап вычисления первого коэффициента усиления и этап вычисления второго коэффициента усиления.
[0154] Объяснение третьей коррекции
Далее будет описана третья коррекция, осуществляемая секцией 3243 третьей коррекции на этапе S203 на фиг. 9.
[0155] Сначала объясним причину осуществления третьей коррекции.
[0156] На фиг. 14 показана диаграмма формы волны, в которой сигналы подразделения, составляющие один цикл электрического угла объединяются согласно настоящему варианту осуществления. Горизонтальная ось представляет оцененный угол [градусы]. Вертикальная ось представляет истинное значение угла [градусы].
[0157] На фиг. 14 кривая g211 является формой волны, полученной соединением сигналов подразделения, составляющих шесть циклов электрического угла. Линия g212 является идеальной линией. Линия g221 и линия g222 обозначают диапазон изменений кривой g211.
[0158] Кривая g211, показанная на фиг. 14, является формой волны, полученной в результате, после корректировок с первой по третью секцией 324 коррекции, соединения сигналов подразделения из секции 322 обнаружения подразделения, как описано в первом варианте осуществления, секцией 323 соединения сегментов линии. Благодаря осуществлению этих корректировок и процессов, как указано линией g221 и линией g222, достигается точность обнаружения положения около ±α [градусов].
[0159] Как описано выше, сигналы подразделения являются схематически S-образными. Когда третья коррекция не осуществляется, диапазон изменения кривой g211 будет больше, чем проиллюстрировано в примере, показанном на фиг. 14. Другими словами, точность обнаружения положения будет связана с большим значением, чем ±α [градусов]. Таким образом, секция 3243 третьей коррекции осуществляет третью коррекцию, корректируя схематически S-образные сигналы подразделения в линии. В результате, третья коррекция позволяет дополнительно повышать точность обнаружения положения.
[0160] Позиции g311, g312, x1 и x2 на фиг. 14 будут описаны в третьем варианте осуществления.
[0161] Далее будет подробно описана третья коррекция.
[0162] Используя значение, хранящееся в секции 33A хранения, в качестве коэффициента для сигнала обнаружения каждой фазы, секция 3243 третьей коррекции осуществляет третью коррекцию изменения масштаба сигнала обнаружения.
[0163] Посредством третьей коррекции, схематическую S-форму каждого сигнала подразделения можно превратить в линию. В данном случае, значение, хранящееся в секции 33A хранения, является заранее установленным значением.
[0164] Эта третья коррекция осуществляет процесс вычисления на основании уравнения коррекции, например, квадратичной функции, кубичной функции или тригонометрической функции, с использованием заранее установленного значения.
[0165] В нижеследующем описании, будет приведен пример применения третьей коррекции к сигналам Hiu1', Hiv2' и Hiw1' обнаружения после второй коррекции.
[0166] Hiu2' является скорректированным значением, полученным в результате применения третьей коррекции к сигналу обнаружения U-фазы после второй коррекции. Hiv2' является скорректированным значением, полученным в результате применения третьей коррекции к сигналу обнаружения V-фазы после второй коррекции. Hiw2' является скорректированным значением, полученным в результате применения второй коррекции к сигналу обнаружения W-фазы после второй коррекции.
[0167] Далее будут описаны результаты третьей коррекции.
[0168] На фиг. 15 показана диаграмма формы волны, демонстрирующая иллюстративный результат осуществления третьей коррекции согласно настоящему варианту осуществления. Диаграмма формы волны, показанная на фиг. 15, представляет собой форму волны после применения третьей коррекции после применения второй коррекции. На фиг. 15 горизонтальная ось представляет угол поворота ротора [градусы]; вертикальная ось представляет цифровое значение.
[0169] Формы волны в области, указанной позицией g201 на фиг. 15, являются увеличенными формами волны по сравнению с формами волны в области, указанной позицией g200. Из форм волны в области, указанный позицией g201, кривая Hiu1(1)' является участком формы волны сигнала Hiu1(1)' обнаружения, подвергнутого второй коррекции после первой коррекции. Кривая Hiu2' является участком формы волны сигнала Hiu2' обнаружения, подвергнутого второй коррекции после первой коррекции, и затем дополнительно подвергнутого третьей коррекции.
[0170] По сравнению с кривой Hiu1(1)' в течение периода от пересечений cp101' - cp102', кривая Hiu2' в течение периода от пересечений cp101 - cp102 имеет более высокую линейность, чем сигнал обнаружения между пересечениями.
[0171] Таким образом, благодаря третьей коррекции, сигналы Hiu2', Hiv2' и Hiw2' обнаружения достигают повышенной линейности и обеспечивают сигналы, более пропорциональные углам, по сравнению с сигналами Hiu1(ppn)', Hiv1(ppn)' и Hiw1(ppn)' обнаружения, показанными на фиг. 12.
[0172] Заметим, что секция 3243 третьей коррекции осуществляет процесс вычисления процесса третьей коррекции на основании уравнения коррекции, которое соответствует форме формы волны сигнала обнаружения.
[0173] Вместо использования заранее установленных значений, секция 3243 третьей коррекции может использовать значения, последовательно вычисляемые на основании сигналов обнаружения из непосредственно предыдущего цикла механического угла, аналогично второй коррекции. Затем секция 3243 третьей коррекции может предписывать секции 33A хранения сохранять вычисленные значения как коэффициенты.
[0174] Хотя в вышеописанном примере показано, что секция 324 коррекции осуществляет все корректировки с первой по третью, это не является ограничением. Например, секция 324 коррекции может применять к сигналу обнаружения, по меньшей мере, одну коррекцию, из корректировок с первой по третью.
[0175] Таким образом, в способе оценивания положения согласно настоящему варианту осуществления, синфазные шумы сигналов обнаружения можно снижать посредством первой коррекции. Кроме того, в настоящем варианте осуществления, изменение среди множества сигналов обнаружения можно корректировать посредством второй коррекции. Используемый здесь термин "изменение среди множества сигналов" означает, например, изменение в отношении амплитуды сигнала обнаружения и его компоненты смещения. Кроме того, в настоящем варианте осуществления, криволинейные участки форм волны можно превращать в линии посредством третьей коррекции. В частности, длины сигналов подразделения униформизируются посредством второй коррекции, что облегчает применения одинакового процесса вычисления ко всем сигналам подразделения в третьей коррекции. Таким образом, вторая коррекция, при осуществлении до третьей коррекции, позволяет лучше превращать криволинейные участки форм волны в линии.
[0176] В результате, в настоящем варианте осуществления, участки сигнала, необходимые для информации положения, лучше аппроксимируют линии, таким образом, уменьшая разность между оцененным значением положения и истинным значением и обеспечивая весьма точное обнаружение положения.
[0177] Хотя настоящий вариант осуществления описан как пример, где секция 324 коррекции корректирует сигналы обнаружения, преобразованные в цифровые сигналы, это не является ограничением. Секция 324 коррекции может быть предусмотрена между секцией 20 усиления и секцией 31 AD-преобразования. В этом случае, секция 324 коррекции может корректировать сигналы Hu0, Hv0 и Hw0 обнаружения как аналоговые сигналы. В настоящем варианте осуществления также количество датчиков в секции 10 обнаружения не ограничивается тремя. В этом случае, выходные сигналы датчиков могут быть сдвинуты по фазе на угол, определенный делением на суммарное количество датчиков.
[0178] Используя скорректированные сигналы обнаружения вышеописанным образом, система 1 управления двигателем способна осуществлять управление положением с более высокой точностью. Например, когда оптический датчик положения используется при обнаружении вращательного положения ротора R, как в традиционной технике, точность обнаружения будет зависеть от разрешения датчика положения. В данном случае, оптический датчик положения может включать в себя, например, светопрерыватель и кодировочный диск. Кодировочный диск имеет щели, проделанные с равными интервалами по периметру. Например, датчик положения с разрешением 400 импульсов имеет точность обнаружения около ±0,9 градусов. С другой стороны, секция 30 оценивания положения, где используется способ оценивания положения согласно настоящему варианту осуществления, способна обеспечить точность, близкую к точности обнаружения оптического датчика положения.
[0179] Третий вариант осуществления
Опишем пример, где секция 30 оценивания положения из первого варианта осуществления дополнительно включает в себя секцию нормирования.
[0180] На фиг. 16 показана схема, демонстрирующая конструкцию системы 1B управления двигателем согласно настоящему варианту осуществления.
[0181] Как показано на фиг. 16, система 1A управления двигателем включает в себя секцию 30B оценивания положения, вместо секции 30 оценивания положения.
[0182] Секция 30B оценивания положения включает в себя секцию 32B вычисления положения вместо секции 32 вычисления положения, и включает в себя секцию 33B хранения вместо секции 33 хранения.
[0183] Кроме того, секция 32B вычисления положения включает в себя секцию 325 нормирования. Секция 325 нормирования осуществляет коррекцию униформизации наклонов сегментов линии сигналов подразделения, обнаруженных секцией 322 обнаружения подразделения, и выводит скорректированные сигналы обнаружения на секцию 323 соединения сегментов линии.
[0184] Секция 33B хранения дополнительно сохраняет нормирующий коэффициент для каждого сегмента. Ниже будет описан нормирующий коэффициент.
[0185] Объяснение нормирования
Сначала, со ссылкой на фиг. 14, будет описана причина для осуществления нормирования.
[0186] Вследствие обнаружения чувствительности датчиков 11-13 и ошибок положений их присоединения, сигналы обнаружения от датчиков 11-13 могут не иметь идентичную форму, что было бы идеально. Кроме того, фазы сигналов обнаружения может не иметь идеальной дефазировки. В результате, различия форм сигналов обнаружения и т.д. влияют на положения пересечения и пересечения нулевого уровня сигналов обнаружения. Затем наклоны сегментов линии соответствующих сигналов подразделения могут не было постоянными. Используемый здесь термин, нормирование означает коррекцию униформизации наклонов сегментов линии сигналов подразделения.
[0187] В порядке примера рассмотрим фиг. 14. При истинном значении угла 60°, оцененный угол принимает значение x1, т.е. около 40°. При истинном значении угла 120°, оцененный угол принимает значение x2, т.е. около 100°. В примере, показанном на фиг. 14, наклон сегмента g311 линии между истинными значениями угла от 0° до 60° отличается от наклона сегмента g312 линии между истинными значениями угла от 60° до 120°.
[0188] Если сегменты линии сигналов обнаружения имеют разные наклоны, когда сигнал sg311 подразделения и сигнал sg312 подразделения соединены, и механический угол определяется из наклона соединенных сегментов линии, различие наклонов сегмента линии может приводить к ошибке в результате оценивания положения.
[0189] Таким образом, в настоящем варианте осуществления, сигналы подразделения нормируются для снижения ошибок в результате оценивания положения.
[0190] На фиг. 17 показана диаграмма, поясняющая нормирование сигналов подразделения согласно настоящему варианту осуществления. На фиг. 17, горизонтальная ось представляет механический угол [градусы]; вертикальная ось представляет цифровое значение. На фиг. 17 для простоты описания показано только два сигнала подразделения.
[0191] Форма волны, указанная позицией g321 на фиг. 17 является формой волны, в которой сигнал sg341' подразделения и сигнал sg342' подразделения соединяются друг с другом. Механический угол сигнала sg341' подразделения равен Θ[1]'. Сигнал sg341' подразделения имеет цифровое значение ΔX[1]. Сигнал sg342' подразделения имеет механический угол Θ[2]'. Сигнал sg342' подразделения имеет цифровое значение ΔX[2].
[0192] Используя нормирующий коэффициент k[i] для каждого сегмента и цифровое значение ΔX[i] для каждого сигнала подразделения, который хранятся в секции 33B хранения, секция 325 нормирования вычисляет механический угол Θ[i]' согласно нижеследующему уравнению (12). Заметим, что i является порядковым номером сегмента, который является целым числом от 1 до 72.
Θ[i]'=ΔX[i]×k[i]...(12)
Секция 325 нормирования вычисляет расхождение ΔΘ[n] механического угла в текущий момент времени от положения пересечения или пересечения нулевого уровня, которое было сохранено в предыдущем проходе, как показано на фиг. 17, с использованием нижеследующего уравнения (13).
ΔΘ[n]=X[n]×k[i]...(13)
В уравнении (13), n представляет неопределенное количество в данный момент времени.
[0193] Секция 325 нормирования перемножает X[n] на вертикальной оси сигнала подразделения с нормирующим коэффициентом k[i], и выводит результат умножения на секцию 323 соединения сегментов линии.
[0194] В настоящем варианте осуществления, сигналы подразделения нормируются до соединения, что позволяет, по существу, униформизировать наклоны сегментов линии сигналов подразделения. В результате, согласно настоящему варианту осуществления, точность обнаружения положения можно дополнительно повысить, даже при наличии изменения точности соединения секций обнаружения или при наличии изменения среди сигналов из секции обнаружения.
[0195] Вычисление нормирующего коэффициента k[i] посредством обработки в автономном (оффлайн) режиме
Теперь опишем способ вычисления нормирующего коэффициента k[i] в вышеприведенном уравнении (13) посредством обработки в автономном режиме. Обработка в автономном режиме представляет собой процесс(ы), подлежащий(е) осуществлению до отгрузки, или процесс(ы), подлежащий(е) осуществлению, например, до фактического использования системы 1B управления двигателем. Вычисление нормирующего коэффициента посредством оперативной обработки будет увеличивать вычислительную нагрузку на секцию 32B вычисления положения. Таким образом, секция 325 нормирования может вычислять нормирующий коэффициент посредством обработки в автономном режиме и сохранять его в секции 33B хранения. Следующие процессы подлежать осуществлению, когда система 1B управления двигателем вращает ротор R с постоянной скоростью вращения, в соответствии с заданным значением положения Θ* из внешнего устройства 70. На фиг. 18 показана диаграмма, поясняющая вычисление нормирующего коэффициента согласно настоящему варианту осуществления. Сигнал, показанный на фиг. 18, указывает значения сигналов подразделения, определенные посредством обработки в автономном режиме. На фиг. 18, горизонтальная ось представляет истинное значение механического угла [градусы]; вертикальная ось представляет цифровое значение. На фиг. 18 для простоты описания показано только два сигнала подразделения.
[0196] Когда двигатель M вращается с заранее определенными оборотами, секция 325 нормирования измеряет истекшее время t[i] от пересечения до пересечения нулевого уровня для каждого сигнала подразделения, составляющего один цикл механического угла, и расхождение ΔXnorm[i], в цифровом значении, от пересечения до пересечения нулевого уровня для каждого сигнала подразделения, составляющего один цикл механического угла.
[0197] Далее, от соответствующего измеренного истекшего времени для каждого сигнала подразделения, секция 325 нормирования вычисляет истинное значение Θnorm[i] механического угла с использованием нижеследующего уравнения (14).
Θnorm[i]={t[i]/(t[1]+....+t[72])}×360 [градусы]...(14)
В уравнении (14), i является порядковым номером сегмента, который является целым числом от 1 до 72.
[0198] Форма волны, указанная позицией g331 на фиг. 18, является формой волны, в которой сигнал sg341 подразделения и сигнал sg342 подразделения соединены друг с другом. Истинное значение механического угла сигнала sg341 подразделения равное Θnorm[1]. Цифровое значение сигнала sg341 подразделения равно ΔXnorm[1].
[0199] Для каждого сигнала подразделения, т.е. для каждого сегмента, секция 325 нормирования вычисляет нормирующий коэффициент k[i] на основании нижеследующего уравнения (15), с использованием истинного значения Θnorm[i] механического угла, определенного уравнением (14). Вычисленный нормирующий коэффициент k[i] сохраняется в секции 33B хранения.
k[i]=Θnorm[i]/ΔXnorm[i]...(15)
[0200] Таким образом, путем осуществления обработки в автономном режиме, можно вычислять нормирующий коэффициент k[i], определенный из уравнения (15). Как описано выше, этот нормирующий коэффициент k[i] используется для вывода в оперативном режиме уравнения (12) механического угла Θ[i]' или уравнение (13) ΔΘ[n]. Это позволяет оценивать механическое положение, в котором корректируется изменение между наклонами сегментов линии сигналов подразделения. Другими словами, одна реализация способа оценивания положения согласно настоящему изобретению предусматривает: этап измерения, на котором, когда подвижная часть вращается с заранее определенными оборотами, секция нормирования измеряет длительность каждого сигнала подразделения, длительность, необходимую для того, чтобы подвижная часть совершила один оборот, и приращение значения сигнала на протяжении каждого сигнала подразделения или длины сегмента линии сигнала подразделения; этап вычисления механического угла, на котором секция нормирования вычисляет механический угол для каждого сигнала подразделения на основании длительности каждого сигнала подразделения, измеренной на этапе измерения, и длительности, необходимой для того, чтобы подвижная часть совершила один оборот; этап вычисления нормирующего коэффициента, на котором секция нормирования вычисляет нормирующий коэффициент для каждого сигнала подразделения делением механического угла, вычисленного на этапе вычисления механического угла на значение сигнала или длину сегмента линии, измеренную на этапе измерения; и этап нормирования, на котором секция нормирования корректирует механический угол посредством нормирования перемножением, для каждого сигнала подразделения, нормирующего коэффициента, вычисленного на этапе вычисления нормирующего коэффициента, со значением сигнала или длинной сегмента линии вновь обнаруженного сигнала подразделения.
[0201] Вычисление Θoffset[i] посредством обработки в автономном режиме
На фиг. 19 показана диаграмма, описывающая вычисление механического углового положения согласно настоящему варианту осуществления. Пример, показанный на фиг. 19, обеспечивает пояснительную диаграмму в отношении пары полюсов номер 1.
[0202] Согласно фиг. 19, допустим, что механическое положение, представляющее интерес, является положением в ΔΘ[n] от секции sc2. ΔΘ[n] является углом ротора R от положения непосредственно предыдущего пересечения или пересечения нулевого уровня до текущего момента времени n.
[0203] Положение, в котором механическое положение принимает значение угла 0°, обозначено как Θoffset[1]. Положение в Θnorm[1] от него обозначено как Θoffset[2]. Положение в Θnorm[2] от положения, в котором механическое положение принимает значение 0°, обозначено как Θoffset[3]. Соответственно, положение в Θnorm[i] от положения, в котором механическое положение принимает значение 0°, обозначено как Θoffset[i].
[0204] Θoffset[i] выражается нижеследующим уравнением (16).
Θoffset[i]=Σ(Θnorm[i-1])...(16)
заметим, что i=1 до 72, Θnorm[0]=0.
[0205] В данном случае, Θoffset[i], вычисленный посредством обработки в автономном режиме, может удерживаться в секции 33B хранения.
[0206] Вычисление механического угла Θ[n]
Таким образом, текущее положение, т.е. механический угол Θ[n] ротора R в текущий момент времени, выражается нижеследующим уравнением (17).
Θ[n]=Θoffset[i]+X[n]×k[i]=Θoffset[i]+ΔΘ[n]...(17)
Как указано уравнением (17), Θoffset[i] извлекается из секции 33B хранения при вычислении механического угла Θ[n] ротора R в текущий момент времени.
[0207] Теперь рассмотрим обработку вычисления в оперативном режиме механического угла Θ[n] ротора R в текущий момент времени. В ряде случаев механическое угловое положение, указанное Θoffset[i], вычисленное посредством оперативной обработки, может отличаться от механического углового положения Θoffset[i], вычисленного посредством обработки в автономном режиме. Эта ошибка является ошибкой вычисления в механическом угле Θ[n] ротора R в текущий момент времени. Вследствие этой ошибки, после поворота ротора R на один цикл механического угла, он может не возвращаться в то же механическое угловое положение.
[0208] Таким образом, используется Θoffset[i], вычисленный посредством обработки в автономном режиме. Как указано уравнением (17), ΔΘ[n] вычисляется на основании механического углового положения до положения пересечения или пересечения нулевого уровня, непосредственно предшествующего ΔΘ[n]. Согласно этому способу, на вычисление ΔΘ[n] может не влиять накопление ошибок, происходящее в предыдущие периоды Θoffset[i]. Другими словами, на этапе вычисления механического угла, секция нормирования вычисляет текущий механический угол путем, в течение периода, необходимого для того, чтобы подвижная часть совершила один оборот, прибавления механического угла, скорректированного на этапе нормирования, к механическому углу из вновь обнаруженного непосредственно предыдущего сигнала подразделения.
[0209] В настоящем описании изобретения, любые данные, получаемые путем вышеописанной обработки в автономном режиме, именуются "данными измерений". Данные измерений это данные, в которых величина перемещения подвижной части, соответствующая каждому сегменту, связана с каждым сегментом. Когда количество сегментов равно 72, для каждого из сегментов 1-72, можно назначать механический угол, полученный путем измерения (т.е. истинное значение механического угла от начальной точки к конечной точке сегмента). Такие данные измерений могут сохраняться и удерживаться как информационная таблица, например, в секции 33, 33A или 33B хранения. Согласно данным измерений, которые считываются из секции 33, 33A или 33B хранения, можно считывать, из порядкового номера сегмента, механический угол сегмента, обозначенного этим порядковым номером, или любая другая информация, связанная с этим механическим углом.
[0210] Например, предположим, что установлено посредством обработки в автономном режиме, что сегмент 1, сегмент 2,..., и сегмент 72 имеют механические углы 4,1 градусов, 4,9 градусов,..., и 5,3 градусов, соответственно. Предполагается, что полученные таким образом данные измерений сохраняется в устройстве хранения в форме таблицы. В этом случае, из порядкового номера обнаруженного сегмента, механический угол (истинное значение), соответствующий этому сегменту, можно получать согласно данным измерений. Такая последовательность значений механического угла уникальна для каждого двигателя, и может служить так называемым "отпечатком пальца" двигателя.
[0211] Данные измерений обычно удерживаются в секции хранения до отгрузки, но могут обновляться позже. Значение нормирующего коэффициента k[i], изученное посредством обработки в автономном режиме, может претерпевать хронологические изменения. Таким образом, обработка в автономном режиме может осуществляться регулярно или нерегулярно, для повторного получения данных измерений.
[0212] Заметим, что данные измерений можно собирать через интернет или другие линии электросвязи, и сохранять на устройства хранения в облаке. Когда данные измерений обновляются, как описано выше, данные измерений в устройстве хранения в облаке также обновляются. На основании содержания обновленных данных измерений, можно также диагностировать двигатель M.
[0213] Идентификация механического положения
Далее будет описан способ идентификации начального механического положения.
[0214] Работа системы 1 управления двигателем согласно настоящему варианту осуществления включает в себя этап хранения, этап определения секции, этап вычисления ошибки, этап оценивания, этап идентификации положения и этап определения. После возобновления питания инициализируется информация сегмента i; таким образом, нормирующий коэффициент k[i], изученный посредством обработки в автономном режиме, не будет правильно применяться. Таким образом, после возобновления питания, необходимо идентифицировать механическое положение (номер сегмента или пары полюсов). В данном случае, номер сегмента или пары полюсов выражается уравнением: порядковый номер сегмента = 12 × номер пары полюсов + порядковый номер секции. Таким образом, путем идентификации номера пары полюсов, можно идентифицировать порядковый номер сегмента (механическое положение).
[0215] На фиг. 20 показана блок-схема операций, демонстрирующая процедуру процесса идентификации начального положения ротора R согласно настоящему варианту осуществления.
(Этап S701) При отгрузке двигателя M или изделия, включающего в себя двигатель M, секция 325 нормирования предписывает секции 33B хранения последовательно сохранять истинное значение Θnorm[i] механического угла для каждого сигнала подразделения, когда ротор R вращается с постоянной скоростью. После возобновления питания, удерживаемая информация, хранящаяся в секции 33B хранения, извлекается из флеш-памяти в RAM. Таким образом, секция 325 нормирования осуществляет обучение, предписывая секции 33B хранения последовательно сохранять истинное значение Θnorm[i] механического угла для каждого сигнала подразделения, когда ротор R вращается с постоянной скоростью.
(Этап S702) На основании относительных величин сигналов Hu0', Hv0' и Hw0' обнаружения, хранящихся в секции 33B хранения, секция 30B оценивания положения определяет порядковые номера секций ротора R.
(Этап S703) Для каждой секции, секция 30B оценивания положения вычисляет ошибку между истинным значением механического угла Θnorm[i] и механическим углом Θ[i].
(Этап S704) Секция 30B оценивания положения осуществляет совокупное оценивание ошибок, вычисленных на этапе S703.
(Этап S705) Секция 30B оценивания положения последовательно отбрасывает любое предполагаемое количество пар полюсов (сегмент), ошибка которых достигла верхнего предела.
(Этап S706) Секция 30B оценивания положения определяет, все ли кандидаты достигли верхнего предела ошибки в течение заранее определенного времени. В случае определения, что не все кандидаты достигли верхнего предела ошибки в заранее определенное время (этап S706; Нет), секция 30B оценивания положения переходит к процессу этапа S707. В случае определения, что все кандидаты достигли верхнего предела ошибки в заранее определенное время (этап S706; Да), секция 30B оценивания положения переходит к процессу этапа S708.
(Этап S707) Путем идентификации сегмента из оставшегося в итоге предполагаемого количества пар полюсов (сегмента), идентифицируется начальное положение ротора R. На этом процесс идентификации порядковых номеров сегментов заканчивается.
(Этап S708) На основании принятого сигнала обнаружения, секция 30B оценивания положения определяет, что это не двигатель M, для которого осуществлялось нормирование.
[0216] На этом процесс идентификации начального положения ротора R заканчивается. На этапе S701 удерживаемая информация, которая хранится в секции 33B хранения, не ограничивается истинным значением Θnorm[i] механического угла. Например, в секции 33B хранения может сохраняться цифровое значение для каждого сигнала подразделения или длина сегмента линии для каждого сигнала подразделения и т.д. Удерживаемая информация, подлежащая сохранению в секции 33B хранения, может включать в себя нормирующие коэффициенты k[i], уравнения коррекции (1) - (3), (6) - (11), уравнения коррекции для использования в третьей коррекции, положительные значения коррекции коэффициента усиления, отрицательные значения коррекции коэффициента усиления, значение коррекции смещения для каждой фазы и заранее установленные значения. Другими словами, на этапе хранения (этапе S701) удерживаемая информация, вычисленная на этапе измерения или этапе вычисления механического угла, заранее сохраняется в секции 33B хранения. Этап вычисления ошибки (этап S703) не ограничивается случаем вычисления ошибки между истинным значением Θnorm[i] механического угла и механическим углом Θ[i]. Например, возможна ошибка между цифровым значением для каждого сигнала подразделения или длиной сегмента линии для каждого сигнала подразделения в удерживаемой информации и цифровым значением для каждого сигнала подразделения или длиной сегмента линии для каждого сигнала подразделения из оперативной обработки. Таким образом, согласно способу оценивания положения в настоящем варианте осуществления, сохранение механического угла и нормирующего коэффициента для каждого сигнала подразделения в секции 33B хранения, позволяет идентифицировать текущее механическое положение даже после возобновления питания. Кроме того, согласно способу оценивания положения в настоящем варианте осуществления, если все кандидаты достигли верхнего предела ошибки в течение заранее определенного времени, можно определить, что сигнал обнаружения не относится к двигателю M, для которого осуществлялось нормирование.
[0217] В настоящем варианте осуществления секция 32B вычисления положения может дополнительно включать в себя секцию 324 коррекции, как описано во втором варианте осуществления. В результате, точность обнаружения положения можно дополнительно повысить.
[0218] Секция 32B вычисления положения или секция 32A вычисления положения, которая дополнительно включает в себя секцию 324 коррекции, может быть адаптирована таким образом, что информация, подлежащая сохранению в секции 33B хранения, получается и изучается в ходе обработки в автономном режиме и затем сохраняется в секции 33B хранения или секции 33A хранения. В данном случае, удерживаемая информация, подлежащая сохранению в секции 33B хранения или секции 33A хранения, представляет собой уравнения коррекции (1) - (3), (6) - (11), уравнения коррекции для использования в третьей коррекции, положительные значения коррекции коэффициента усиления, отрицательные значения коррекции коэффициента усиления, значение коррекции смещения для каждой фазы и заранее установленные значения.
[0219] Например, если значения коррекции для использования во второй коррекции подлежат вычислению посредством оперативной обработки, вычислительная нагрузка на секцию 32 вычисления положения будет увеличиваться. Таким образом, секция 3242 второй коррекции может вычислять значения коррекции, подлежащие использованию во второй коррекции посредством обработки в автономном режиме, и сохранять их в секции 33A хранения. В случае, когда секция 33 хранения состоит, например, из флеш-памяти и RAM, секция 3242 второй коррекции может перемещать значения коррекции, сохраненные во флеш-памяти, в RAM для использования при включении питания секции 32 вычисления положения. Что касается значений коррекции в третьей коррекции, секция 3243 третьей коррекции также может сохранять их в секции 33 хранения посредством обработки в автономном режиме.
[0220] В каждом варианте осуществления настоящего изобретения, опорное значение описано как значение, которое принимает цифровое значение 0; однако это не является ограничением. Например, в случае, когда сигналы обнаружения не подвергаются AD-преобразованию, и настоящее изобретение осуществляется на основе аналоговых сигналов, опорное значение не обязано принимать значение 0. Даже в случае использования цифровых сигналов, опорное значение может не быть 0.
[0221] В каждом варианте осуществления настоящего изобретения, "обнаружение" положения пересечения, пересечения нулевого уровня и сигнала подразделения означает, что положение пересечения и пересечение нулевого уровня обнаруживаются в результате вычисления положения пересечения, пересечения нулевого уровня и сигнала подразделения в секции оценивания положения.
[0222] Заметим, что программа для осуществления функций секции (30, 30A, 30B) оценивания положения в каждом варианте осуществления настоящего изобретения может записываться на компьютерно-считываемый носитель данных (не показан), и программа, записанная на этом носителе данных, может загружаться в компьютерную систему для выполнения и, таким образом, осуществления процедуры каждого процесса. Используемый здесь термин "компьютерная система" охватывает OS и любое оборудование, например, периферийные устройства. Кроме того, "компьютерная система" также охватывает систему WWW, которая включает в себя среду представления веб-сайта (или среду отображения веб-сайта). "Компьютерно-считываемый носитель данных" означает портативный носитель, например, гибкий диск, магнитооптический диск, ROM или CD-ROM, а также устройство хранения, например, жесткий диск, установленный внутри компьютерной системы. Кроме того, "компьютерно-считываемый носитель данных" охватывает носитель, на котором программа остается в течение некоторого периода времени, например, энергозависимую память (RAM) внутри компьютерной системы, которая выступает в роли сервера или клиента, когда программа передается через сеть, например, интернет или по линиям электросвязи, например, телефонной сети.
[0223] Кроме того, вышеупомянутая программа может передаваться от компьютерной системы, где эта программа хранится в устройстве хранения и т.п., на другую компьютерную систему, через среду передачи или посредством распространения волны в среде передачи. Используемый здесь термин "среда передачи", позволяющая передавать программу, означает носитель, имеющий функцию передачи информации, например, сеть (сеть связи), например, интернет, или линии электросвязи (линии связи), например, телефонную сеть. Вышеупомянутую программу можно адаптировать для осуществления некоторых из вышеупомянутых функций. Также может существовать что-то, что осуществляет вышеупомянутые функции совместно с программой, которая уже записана в компьютерной системе, т.е. так называемый файл различий (программа различий).
[0224] Четвертый вариант осуществления
Типичным примером датчиков 11-13 в вышеописанных вариантах осуществления являются вышеупомянутые генераторы Холла. Генератор Холла представляет собой датчик (магнитный датчик), который обнаруживает магнитное поле с использованием эффекта Холла. Эффект Холла состоит в том, что, в магнитном поле, имеющем компоненту, перпендикулярную электрическому току, текущему в веществе, например, полупроводнике, возникает электродвижущая сила в направлении, ортогональном как электрическому току, так и магнитному полю. Широко используемый генератор Холла включает в себя две пары клемм. Когда электрический ток течет через первую пару клемм, измеряется напряжение, возникающее на второй паре клемм вследствие эффекта Холла. Датчики, использующие эффект Холла, включают в себя генераторы Холла, холловские ИС и линейные холловские ИС. Здесь будет описан генератор Холла.
[0225] На фиг. 21 показана принципиальная схема генератора 100 Холла. В этом примере постоянное напряжение Vin подается на первую пару клемм Vi+, Vi- генератора 100 Холла от источника 80 напряжения, благодаря чему, электрический ток течет в вертикальном направлении на фигуре. Когда электрический ток течет внутри генератора 100 Холла в присутствие внешнего магнитного поля, на второй паре клемм VH+, VH- генератора 100 Холла возникает напряжение. При подаче постоянного напряжения Vin, т.е. в режиме работы постоянного напряжения, это напряжение (выходное напряжение) пропорционально напряженности магнитного поля. Это позволяет обнаруживать напряженность магнитного поля на основании выходного напряжения генератора 100 Холла.
[0226] На фиг. 22 показан график, демонстрирующий иллюстративное соотношение между выходным напряжением и подаваемым напряжением Vin генератора 100 Холла в постоянном магнитном поле. Как явствует из фиг. 22, выходное напряжение генератора 100 Холла изменяется пропорционально подаваемому напряжению Vin, несмотря на то, что магнитное поле может иметь постоянную величину. Когда генератор 100 Холла работает при постоянном напряжении, выходное напряжение вряд ли имеет какую-либо зависимость от температуры окружающей среды.
[0227] На фиг. 23 показана принципиальная схема, демонстрирующая иллюстративную конструкцию, в которой три датчика 11-13 в вышеупомянутых вариантах осуществления реализованы тремя генераторами Холла. Датчики 11-13, каждый из которых является генератором Холла, последовательно соединены между источником 80 напряжения и землей, через резисторы 15 и 16. Резисторы 15 и 16 функционируют для предотвращения отсечки напряжения.
[0228] Согласно исследованию, проведенному авторами настоящего изобретения, выходное напряжение генератора Холла в режиме работы постоянного напряжения, который первоначально вряд ли подвергается влиянию температуры окружающей среды, может флуктуировать относительно температуры окружающей среды в соответствии со схемой на фиг. 23. Причиной этой флуктуации является температурная зависимость значений сопротивления резисторов 15 и 16 и температурная зависимость значений сопротивления генераторов 100 Холла. В частности, значения сопротивления резисторов 15 и 16 возрастают с увеличением температуры окружающей среды, причем резистор 15 имеет положительный температурный коэффициент. С другой стороны, как показано на фиг. 24, значения сопротивления генераторов 100 Холла уменьшаются с увеличением температуры окружающей среды, причем генераторы 100 Холла имеют отрицательный температурный коэффициент.
[0229] Как показано на фиг. 25, резистор 15, датчик 11, датчик 12, датчик 13 и резистор 16 имеют значения сопротивления R1, Rin1, Rin2, Rin3 и R2, соответственно. Кроме того, напряжения V1, V2, V3, V4 и V5 подаются на резистор 15, датчик 11, датчик 12, датчик 13 и резистор 16, соответственно. Как упомянуто выше, когда температура окружающей среды возрастает, значения сопротивления R1 и R2 увеличиваются, но значения сопротивления Rin1, Rin2 и Rin3 уменьшаются. Напряжения, подаваемые на соответствующие элементы, делятся в соответствии с отношением их сопротивлений. Таким образом, когда температура окружающей среды возрастает, даже если источник 80 напряжения имеет постоянное напряжение, напряжения V1 и V5 будут повышаться, и напряжения V2, V3 и V4 будут снижаться. Напряжения V2, V3 и V4 являются соответствующими напряжениями, подаваемыми на три генератора 100 Холла. Как описано со ссылкой на фиг. 22, снижение напряжения, подаваемого на генератор 100 Холла, приводит к снижению его выходного напряжения, даже при постоянном внешнем магнитном поле.
[0230] Как явствует из вышеприведенного описания, при конструкции схемы, показанной на фиг. 23, когда температура окружающей среды возрастает, напряжения, подаваемые на генераторы 100 Холла снижаются, благодаря чему, сигналы Hu0, Hv0 и Hw0, показанные на фиг. 3, уменьшаются по амплитуде. С другой стороны, когда температура окружающей среды уменьшается, напряжения, подаваемые на генераторы 100 Холла повышаются, благодаря чему, сигналы Hu0, Hv0 и Hw0 на фиг. 3 увеличиваются по амплитуде.
[0231] Если температура окружающей среды в ходе работы отличается от температуры окружающей среды в ходе обучения в автономном режиме, использованием данных измерений в неизменном виде может приводить к ошибке в оцененном значении положения подвижной части.
[0232] В настоящем варианте осуществления, для уменьшения или исключения вышеупомянутой ошибки, предусмотрена конструкция для коррекции изменений амплитуд сигналов Hu0, Hv0 и Hw0, которые могут происходить при изменении температуры окружающей среды. Далее будет описан пример этой конструкции.
[0233] На фиг. 26 показана принципиальная схема, демонстрирующая иллюстративную конструкцию схемы генераторов 100 Холла согласно настоящему варианту осуществления. В настоящем варианте осуществления, датчики 11-13, каждый из которых является генератором 100 Холла, последовательно соединены между клеммой Ta источника 80 напряжения и заземленной клеммой Tb, через термисторы 17 и 18. С клемм Ta и Tb напряжение подается на последовательно соединенные термистор 17, датчики 11-13 и термистор 18. Термисторы 17 и 18 выступают в той же роли, что и вышеупомянутые резисторы 15 и 16, предотвращая отсечку напряжения. Единственное отличие состоит в том, что сопротивления термисторов 17 и 18 уменьшаются с увеличением температуры окружающей среды, и термисторы 17 и 18 имеют температурные коэффициенты той же полярности (отрицательной), что и генераторы 100 Холла. В результате, подавляются изменения подаваемого напряжения вследствие изменений температуры окружающей среды.
[0234] Вообще говоря, значение сопротивления R генератора Холла приближению выражается следующим уравнением (см. фиг. 24).
R=R0×exp{B(1/T-1/T0)}
Здесь exp обозначает экспоненциальную функцию, R0 и B - постоянные, T обозначает текущую температуру, и T0 обозначает опорную температуру. Температуры выражаются в единицах абсолютной температуры. Величина "B", которая является коэффициентом для 1/T, именуется "постоянной B". Предпочтительно, термисторы 17 и 18 имеют температурные характеристики, аналогичные температурным характеристикам, выраженным вышеприведенным приближенным выражением.
[0235] Вместо термисторов 17 и 18, в качестве резистивных элементов для предотвращения отсечки напряжения можно использовать генераторы 100 Холла. В этом случае, генераторы Холла, подлежащие использованию в качестве резистивных элементов, имеют "постоянную B" такой же величины, как генераторы Холла, используемые в качестве датчиков 11-13, что позволяет подавлять изменения подаваемого напряжения вследствие изменений температуры окружающей среды.
[0236] Пятый вариант осуществления
Настоящий вариант осуществления имеет конструкцию, которая, даже если выходной сигнал генератора Холла изменяется вследствие изменений температуры окружающей среды, компенсирует это изменение. На фиг. 27 показана принципиальная схема, демонстрирующая основной участок конструкции согласно настоящему варианту осуществления. Настоящий вариант осуществления включает в себя схему 19 измерения напряжения, которая измеряет напряжение на нижнем термистора 18. Выходной сигнал схемы 19 измерения напряжения вводится в схему 314 AD-преобразования (ADC) в секции 30 оценивания положения в реальном времени. Сигнал (цифровое значение), который выводится из схемы 314 AD-преобразования, указывает напряжение на термисторе 18. На основании напряжения на термисторе 18, секция 30 оценивания положения вычисляет напряжение, подаваемое на каждый генератор 100 Холла. Поскольку соотношение (см. фиг. 24) между напряжением, подаваемым на генератор 100 Холла, и выходным напряжением, известно, секция 3244 четвертой коррекции способна корректировать амплитуды сигналов Hu0', Hv0' и Hw0' обнаружения на основании напряжений, подаваемых на генераторы 100 Холла. В частности, допустим, что при увеличении температуры окружающей среды нескорректированные амплитуды текущих сигналов Hu0', Hv0' и Hw0' обнаружения снижаются, например, до 50% величины амплитуд сигналов Hu0', Hv0' и Hw0' обнаружения, полученных в результате обучения в автономном режиме. В этом случае, обнаруженное напряжение на термисторе 18 должно увеличиваться по сравнению с напряжением, полученным в результате обучения в автономном режиме. На основании текущего измеренного напряжения на термисторе 18, секция 3244 четвертой коррекции преобразует нескорректированные амплитуды текущих сигналов Hu0', Hv0' и Hw0' обнаружения в скорректированные значения, которые вдвое больше, и вводит их в секцию 32 вычисления положения. Например, в случае варианта осуществления, показанного на фиг. 8, сигналы Hu0', Hv0' и Hw0' обнаружения, скорректированные секцией 3244 четвертой коррекции, поступают на секцию 324 коррекции.
[0237] Вместо измерения напряжения на термисторе 18, можно измерять напряжение на верхнем термисторе 17. Кроме того, можно измерять напряжения на обоих термисторах 17 и 18. В случае, когда вместо термисторов 15 и 16 используются резисторы 15 и 16 (см. фиг. 23), схема 19 измерения напряжения может измерять напряжение на, по меньшей мере, одном из резисторов 15 и 16.
[0238] В настоящем варианте осуществления, значение напряжения, которое измеряется схемой 19 измерения напряжения при проведении обучение в автономном режиме, т.е. при получении данных измерений, сохраняется в секции 338 хранения в качестве опорного значения напряжения. Секция 3244 четвертой коррекции, функционирующая как часть схемы предобработки, считывает опорное значение напряжения из секции 338 хранения и корректирует сигнал обнаружения на основании текущего значения напряжения, полученного из схемы 19 измерения напряжения, и опорного значения напряжения.
[0239] Таким образом, устройство оценивания положения согласно настоящему варианту осуществления включает в себя схему измерения обнаружения напряжения, которая обнаруживает значение напряжения на резистивном элементе или секции обнаружения и вводит его на секцию коррекции, функционирующую как схема предобработки. Эта секция коррекции корректирует N сигналов обнаружения на основании значений обнаруженного напряжения. Способ оценивания положения, осуществляемый в настоящем варианте осуществления, включает в себя этап температурной компенсации, состоящий в обнаружении значения напряжения на одной из N секций обнаружения или резистивном элементе, и коррекции сигнала обнаружения на основании значения обнаруженного напряжения. Таким образом, даже если выходной сигнал датчика, например, генератора Холла, изменяется вследствие изменений температуры окружающей среды, это изменение можно скомпенсировать.
[0240] Шестой вариант осуществления
Согласно настоящему варианту осуществления, на этапе соединения сегментов линии, секция 32 вычисления положения генерирует и выводит сигнал Z-фазы, указывающий опорное положение подвижной части, синхронно с обнаружением одного или более конкретных сигналов подразделения, выбранных из множественных соединенных сигналов подразделения. На фиг. 28 показана схема, демонстрирующая иллюстративную конструкцию секции 32 вычисления положения согласно настоящему варианту осуществления. В настоящем варианте осуществления, любая другая конструкция, которая не показана, может быть идентична конструкции в любом из вышеописанных вариантов осуществления.
[0241] Секция 32 вычисления положения согласно настоящему варианту осуществления включает в себя схему 326 сигнала Z-фазы, которая, в соответствии с фазой сигнала, выводимой из секции 323 соединения сегментов линии, генерирует и выводит так называемый сигнал Z-фазы. Фазосдвигающая схема 327 подключена к схеме 326 сигнала Z-фазы. Фазосдвигающая схема 327 регулирует тайминг, с которым схема 326 сигнала Z-фазы выводит сигнал Z-фазы.
[0242] На фиг. 29 показана схема, демонстрирующая форму волны сигнала (сигнала, указывающего оцененное значение положения), который выводится из секции 323 соединения сегментов линии, и иллюстративные формы волны сигнала Z-фазы в каждом из вышеописанных вариантов осуществления. Как описано выше, сигнал, который выводится из секции 323 соединения сегментов линии, удерживает информацию (абсолютную механическую угловую информацию), указывающую механический угол Θ^, который является оцененным значением механического положения ротора. На самом верхнем графике фиг. 29, вертикальная ось представляет оцененный механический угол Θ^, и горизонтальная ось представляет время. Этот график демонстрирует период, в течение которого ротор делает 4 оборота и дополнительно поворачивается на механический угол 120 градусов. Как явствует из фиг. 29, это механический угол Θ^, который определяется из величины этого сигнала, что позволяет однозначно задавать абсолютное механическое положение (ориентацию) ротора.
[0243] Фиг. 29 демонстрирует различные примеры формы волны сигнала Z-фазы, который выводится из схемы 326 сигнала Z-фазы. Среди примеров, показанных на фигуре, сигнал Z1 является импульсным сигналом, который принимает логически высокое значение на каждой фазе, где механический угол Θ^ принимает значение 0 градусов относительно опорного положения. Сигнал Z2 является импульсным сигналом, который принимает логически высокое значение на каждой фазе, где механический угол Θ^ отстает от опорного положения на произвольный угол, который задается фазосдвигающей схемой 327 на фиг. 28.
[0244] В вышеприведенном примере импульсный сигнал выводится каждый раз, когда ротор делает один оборот по механическому углу; однако частота, с которой выводится сигнал Z-фазы, не ограничивается этим примером. Сигнал Z3 является импульсным сигналом, который принимает логически высокое значение на каждой фазе, где механический угол Θ^ отстает от опорного положения на множество углов (меньше, чем на 360 градусов механического угла), заданным фазосдвигающей схемой 327. Сигнал Z4 является импульсным сигналом, выводимым таким образом, что цикл механического угла Θ^ больше 360 градусов относительно опорного положения. В случае, когда угол сдвига фазы, заданный фазосдвигающей схемой 327, больше 360 градусов механического угла, никакого импульсного сигнала, имеющего логически высокое значение, не выводится, пока механический угол Θ^ не увеличится на угол сдвига фазы от опорного положения.
[0245] Таким образом, согласно настоящему варианту осуществления, без необходимости в датчике положения, на основании величины сигнала, указывающего механический угол Θ^, импульсные сигналы могут выводиться с произвольными фазами и с произвольной частотой. Такие импульсные сигналы можно использовать как сигналы Z-фазы в традиционном смысле или применять в различных других целях.
[0246] Седьмой вариант осуществления
Секции 30, 30A и 30B оценивания положения согласно вышеописанным вариантам осуществления можно реализовать с использованием схемы обработки сигнала и носителя данных, где хранится компьютерная программа, управляющая работой этой схемы обработки сигнала. Далее будет описан такой вариант осуществления.
[0247] На фиг. 30 показана схема, демонстрирующая иллюстративную конструкцию системы 1 управления двигателем согласно настоящему варианту осуществления. Как показано на фиг. 30, система 1 управления двигателем согласно настоящему варианту осуществления включает в себя двигатель M, секцию 10 обнаружения, секцию 20 усиления, устройство 300 оценивания положения, вентильный возбудитель 450, инвертор 460 и контроллер 500.
[0248] Секция 10 обнаружения включает в себя N (где N - целое число, равное 3 или более) датчиков, которые обнаруживают магнитные поля, создаваемые множеством магнитных полюсов, расположенных на роторе R, причем каждый из N датчиков выводит сигнал обнаружения, величина которого соответствует напряженности обнаруженного магнитного поля. N датчиков располагаются так, что N сигналов обнаружения сдвинуты по фазе на угол 360 градусов/N. В примере, показанном на фигуре, N равно 3, и секция 10 обнаружения включает в себя датчики 11, 12 и 13. Конструкция и работа двигателя M, секции 10 обнаружения и секции 20 усиления в настоящем варианте осуществления описаны применительно к другим вариантам осуществления, и их подробное описание здесь не будет приведено повторно.
[0249] Устройство 300 оценивания положения согласно настоящему варианту осуществления включает в себя схему 350 предобработки, которая генерирует N скорректированных сигналов обнаружения из N сигналов обнаружения, и схему 400 обработки сигнала, которая генерирует и выводит сигнал, указывающий оцененное значение положения подвижной части на основании N скорректированных сигналов обнаружения.
[0250] Схема 400 обработки сигнала согласно настоящему варианту осуществления может представлять собой интегральную схему (IC), например, центральный процессор (CPU) или цифровой сигнальный процессор. Устройство 300 оценивания положения включает в себя носитель данных, где хранится компьютерная программа для управления работой схемы 400 обработки сигнала. Этот носитель данных, который может представлять собой энергонезависимую память 420, например, флеш-память, подключен к схеме 400 обработки сигнала.
[0251] В настоящем варианте осуществления, N скорректированных сигналов обнаружения, которые выводятся из схемы 350 предобработки, временно хранятся как переменные в RAM 410.
[0252] Схема 350 предобработки включает в себя вышеупомянутую секцию 31 AD-преобразования и может, в необязательном порядке, включать в себя секцию 3244 коррекции (фиг. 27). Схема 350 предобработки преобразует сигналы обнаружения в цифровые сигналы и подвергает их различным процессам коррекции. Сигналы обнаружения, подвергнутые такой предобработке, будут именоваться здесь "скорректированными сигналами обнаружения".
[0253] В соответствии с инструкциями компьютерной программы, схема 400 обработки сигнала осуществляет следующие этапы.
[0254] Сначала схема 400 обработки сигнала считывает скорректированные сигналы обнаружения из RAM 410. Далее последовательно обнаруживается пересечение, на котором два сигнала из N скорректированных сигналов обнаружения пересекаются друг с другом.
[0255] Схема 400 обработки сигнала подразделяет скорректированный сигнал обнаружения, который связывает от пересечения к другому пересечению, которое является смежным для этого пересечения, на один или более сегментов, и обнаруживает каждый сегмент в качестве сигнала подразделения.
[0256] Схема 400 обработки сигнала считывает данные измерений, в которых величина перемещения подвижной части, соответствующая каждому сегменту, связана с каждым сегментом, из устройства хранения. Это устройство хранения может представлять собой носитель данных, в котором хранится вышеупомянутая компьютерная программа, или другое устройство хранения, например, карта памяти. В настоящем варианте осуществления, данные измерений удерживаются в энергонезависимой памяти 420 и считываются из энергонезависимой памяти 420. Как описано выше, эти данные измерений получаются посредством обработки в автономном режиме до отгрузки и удерживаются в носителе данных. После отгрузки данные измерений могут обновляться.
[0257] Согласно эти данные измерений, схема 400 обработки сигнала идентифицирует сегмент, который соответствует текущему положению ротора R, на основании соотношения N скорректированных сигналов обнаружения и на основании сигналов подразделения.
[0258] Как описано выше, в одной реализации, имея целое число i, большее или равное 1, целое число n, которое задает текущий момент времени, порядковый номер i идентифицированного сегмента, положение Θoffset[i] ротора R в начальной точке идентифицированного сегмента, разность X[n] между значением сигнала подразделения в начальной точке сегмента и текущим значением сигнала подразделения, оцененное значение положения Θ[n] ротора R и коэффициент пропорциональности k[i], выполняется соотношение Θ[n]=Θoffset[i]+k[i]×X[n]. Из этого соотношения определяется оцененное значение положения ротора R.
[0259] Сигнал, указывающий оцененное значение положения ротора R имеет значение, которое линейно возрастает пропорционально величине перемещения ротора R от опорного положения. В предпочтительной реализации, сигнал, указывающий оцененное значение положения ротора R, имеет цифровое значение или аналоговое значение, которое пропорционально Θ.
[0260] Таким образом, на основании идентифицированного сегмента, схема 400 обработки сигнала определяет оцененное значение положения подвижной части из уровней сигналов подразделения и выводит сигнал, указывающий оцененное значение положения. Сигнал оцененного положения может вводиться в клемму обратной связи (F/B) контроллера 500 в форме цифрового значения. Сигнал оцененного положения может выводиться наружу как последовательные данные или преобразовываться схемой 440 DA-преобразование (DAC) в аналоговое значение и затем выводиться. Например, в ходе обслуживания, сигнал, преобразованный в аналоговое значение, можно наблюдать на осциллографе, что позволяет сравнивать заданное значение положения и оцененное значение положения.
[0261] Устройство 300 оценивания положения может включать в себя схему (фиг. 28), которая выводит вышеупомянутый сигнал Z-фазы в импульсной форме согласно инструкции из схемы 400 обработки сигнала. Функциональные блоки, показанные на фиг. 28, также можно реализовать посредством схемы 400 обработки сигнала.
[0262] Программа может быть написана таким образом, что схема 350 предобработки в схеме 400 обработки сигнала осуществляет этап коррекции, выбранный из вышеупомянутых этапа первой коррекции, этапа второй коррекции и этапа третьей коррекции, для генерации скорректированного сигнала обнаружения. Когда схема 400 обработки сигнала действует в соответствии с такой программой, на этапе первой коррекции последовательно осуществляется выбор одного из сигналов обнаружения и вычитание среднего значения других невыбранных сигналов обнаружения из выбранного сигнала обнаружения, чтобы, таким образом, корректировать выбранный сигнал обнаружения для генерации скорректированного сигнала обнаружения. Этап второй коррекции предусматривает: для сигнала обнаружения каждой фазы, обнаружение локального максимума и локального минимума для соответствующей пары полюсов и максимального значения амплитуды и минимального значения амплитуды на цикл электрического угла, в течение, по меньшей мере, двух циклов; для сигнала обнаружения каждой фазы, вычисление в секции коррекции среднего максимальных значений амплитуды и среднего минимальных значений амплитуды; определение значения коррекции смещения как среднего между максимальным и минимальным значениями, которое вычисляется из среднего максимальных значений амплитуды и среднего минимальных значений амплитуды; для каждого сигнала обнаружения, вычисление положительного значения коррекции коэффициента усиления для соответствующей пары магнитных полюсов, которое приравнивает локальный максимум с заранее определенным максимальным значением; для сигнала обнаружения каждой фазы, вычисление отрицательного значения коррекции коэффициента усиления для соответствующей пары магнитных полюсов, которое приравнивает локальный минимум с заранее определенным минимальным значением; и для сигнала обнаружения каждой фазы, прибавление значение коррекции смещения, умножение положительного значения сигнала из соответствующей пары магнитных полюсов с положительным значением коррекции коэффициента усиления, и умножение отрицательного значения сигнала из соответствующей пары магнитных полюсов с отрицательным значением коррекции коэффициента усиления. Этап третьей коррекции предусматривает перемножение каждого сигнала обнаружения с заранее определенным коэффициентом на основании состояния формы волны сигнала обнаружения.
[0263] Из операций, подлежащих выполнению схемой 400 обработки сигнала, следующие никоим образом не являются обязательными операциями согласно настоящему изобретению: считывание, из устройства хранения, данных измерений, в которых величина перемещения подвижной части, соответствующая каждому сегменту, связана с каждым сегментом; и идентификация сегмента, который соответствует текущему положению подвижной части согласно данным измерений и на основании соотношения N скорректированных сигналов обнаружения и на основании сигналов подразделения. Вместо выполнения этих операций, схема 400 обработки сигнала может последовательно соединить сигналы подразделения и, на основании множественных соединенных сигналов подразделения, определять оцененное значение положения подвижной части из уровней сигналов подразделения, и выводить сигнал, указывающий оцененное значение положения.
[0264] Помимо выполнения вышеупомянутого процесса оценивания положения, схема 400 обработки сигнала может быть запрограммирована осуществлять вычисления, необходимые для возбуждения двигателя. Различные процессы, подлежащие выполнению схемой 400 обработки сигнала, не обязаны выполняться единой IC. Некоторые или все функции, подлежащие осуществлению секцией 30, 30A или 30B оценивания положения и секцией 50 управления согласно вариантам осуществления с первого по шестой, можно реализовать посредством цифровой обработки сигнала. Таким образом, разные процессы, подлежащие выполнению соответствующими функциональными блоками секции 30, 30A или 30B оценивания положения, могут распределяться между несколькими блоками обработки или цифровыми сигнальными процессорами (DSP). Кроме того, схема 400 обработки сигнала согласно настоящему варианту осуществления может быть реализована с использованием программируемого логического устройства, например, FPGA (вентильной матрицы, программируемой пользователем).
[0265] В настоящем варианте осуществления, на основании оцененного значения положения ротора R, схема 400 обработки сигнала вычисляет заданное значение напряжения, необходимое для управления двигателем, и подает его на схему 430 широтно-импульсной модуляции (PWM). На основании этого заданного значения напряжения, схема 430 широтно-импульсной модуляции подает сигнал PWM на вентильный возбудитель 450. На основании сигнала PWM, вентильный возбудитель 450 отпирает или запирает переключающие транзисторы в инверторе 460 для подачи необходимого напряжения и электрического тока на двигатель M.
[0266] При получении или обновлении данных измерений в автономном режиме, схема 400 обработки сигнала, ротор R перемещается (вращается) с постоянной скоростью в соответствии с инструкцией компьютерной программы. Затем она измеряет время перемещения (вращения) ротора R для каждого сегмента и генерирует данные, в которых величина перемещения (механический угол) ротора R, соответствующая каждому сегменту, связана с каждым сегментом. Схема 400 обработки сигнала предписывает сохранять эти данные в энергонезависимую память 420 в качестве данных измерений.
[0267] Когда система включает в себя элемент обнаружения температуры, температура во время получения данных измерений может сохраняться в устройстве хранения в качестве опорной температуры. Как описано применительно к шестому варианту осуществления, когда сигнал обнаружения изменяется по амплитуде в зависимости от температуры окружающей среды, опорная температура может считываться из устройства хранения, и сигнал обнаружения может корректироваться на основании текущей температуры, полученной от элемента обнаружения температуры, и на основании опорной температуры.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0268]
1, 1A, 1B, 1C - система управления двигателем, 10 - секция обнаружения, 11, 12, 13 - датчик, 20 - секция усиления, 21, 22, 23 - дифференциальный усилитель, 30, 30A, 30B - секция оценивания положения, 31 - секция AD-преобразования, 311, 312, 313 - схема AD-преобразования, 321 - секция обнаружения пересечения, 322 - секция обнаружения подразделения, 323 - секция соединения сегментов линии, 324 - секция коррекции, 3241 - секция первой коррекции, 3242 - секция второй коррекции, 3243 - секция третьей коррекции, 325 - секция нормирования, 33, 33A, 33B - секция хранения, 40 - вычитатель, 50 - секция управления, 60 - секция возбуждения, M – двигатель.
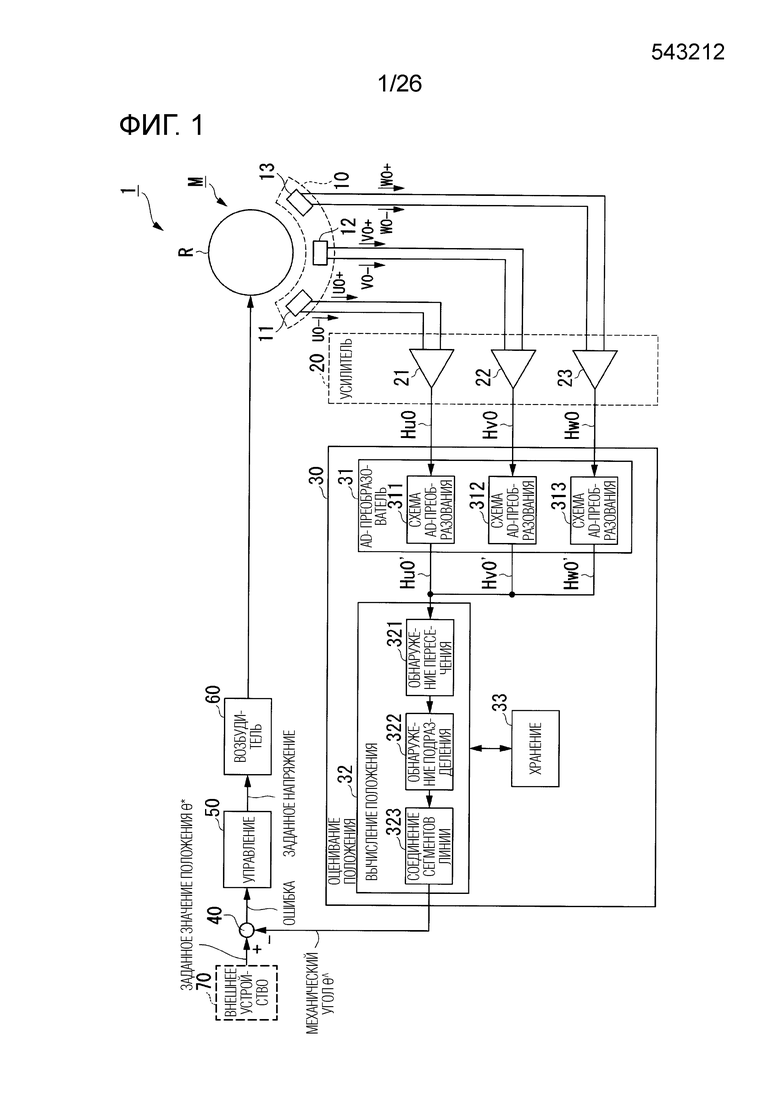
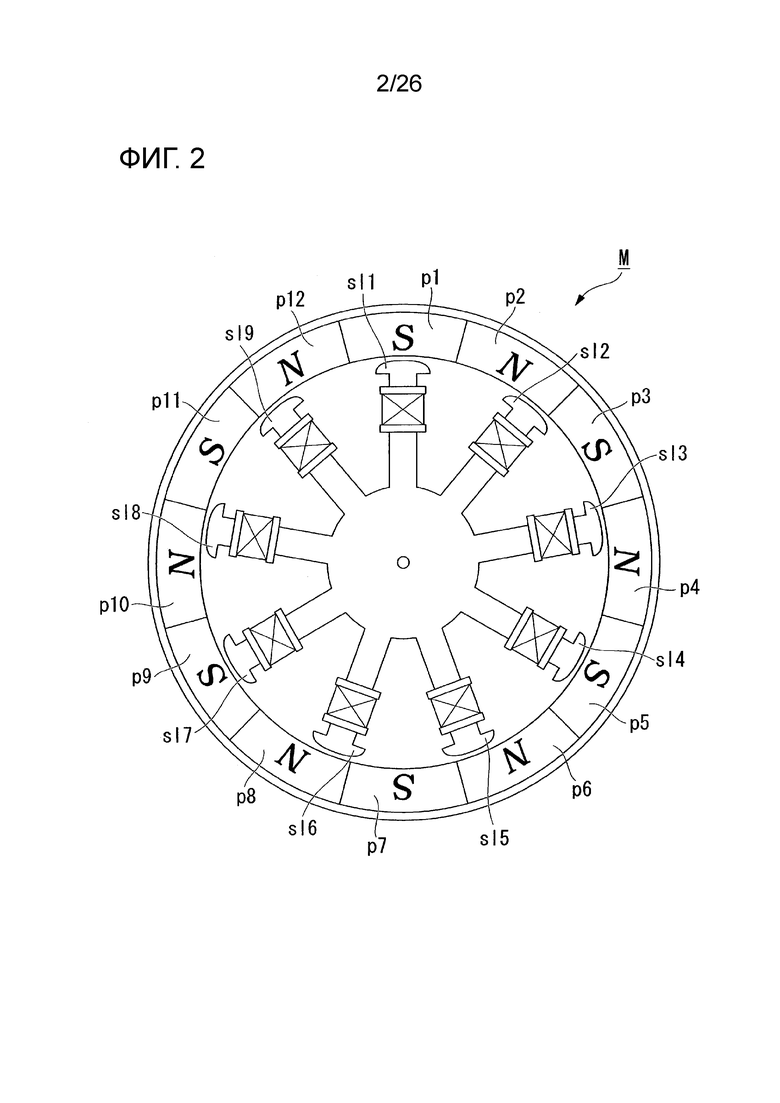

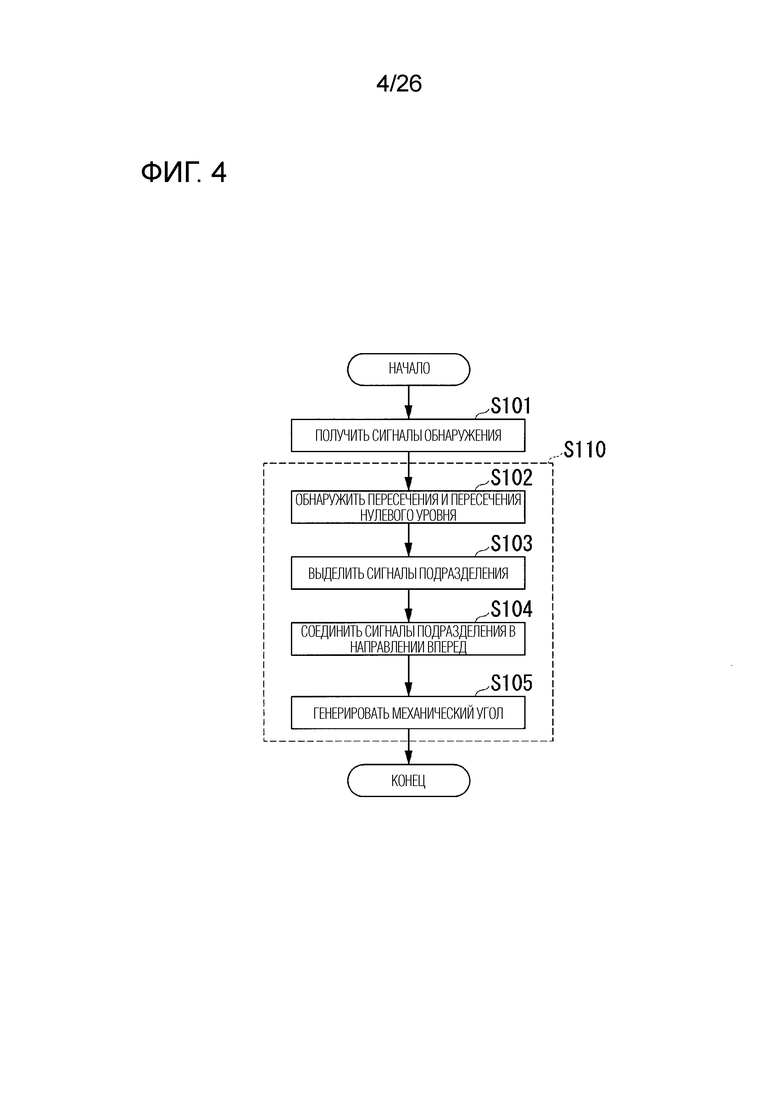

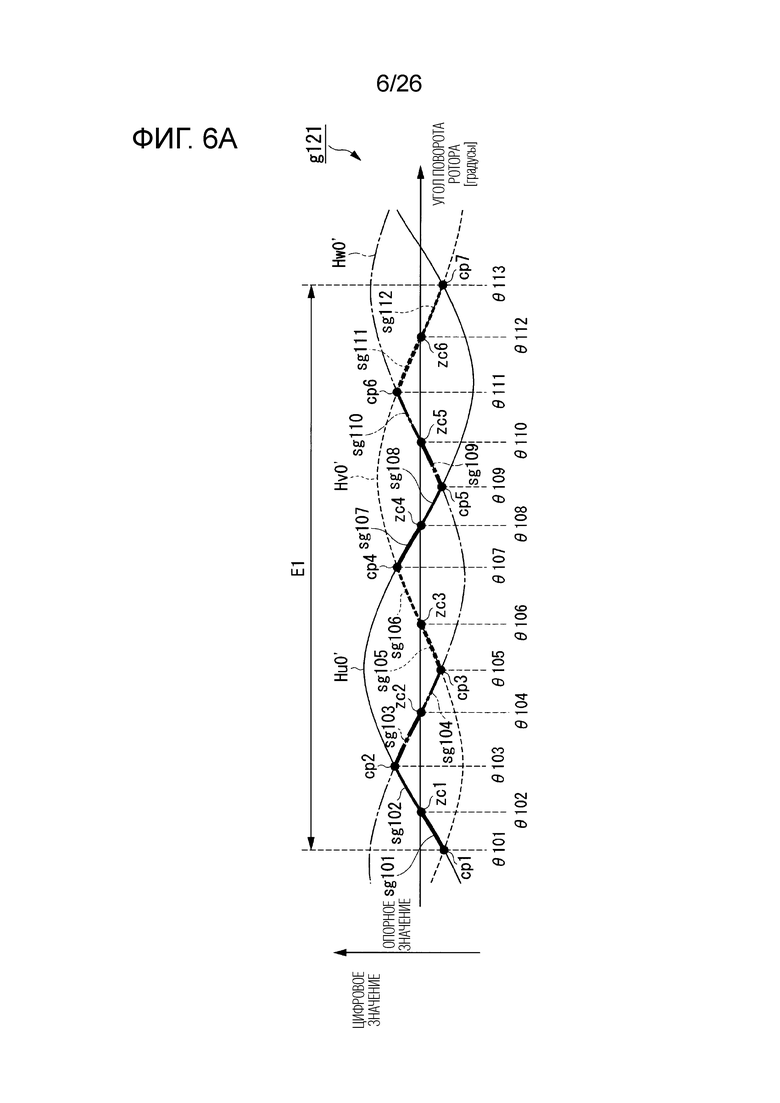
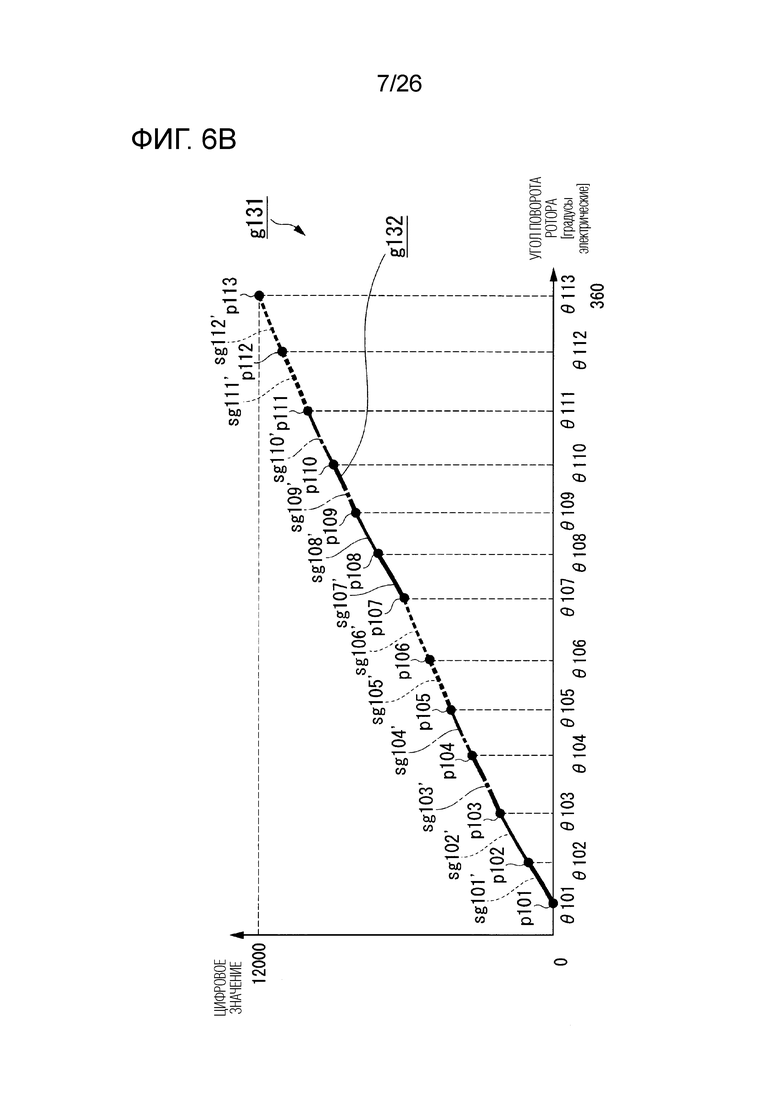

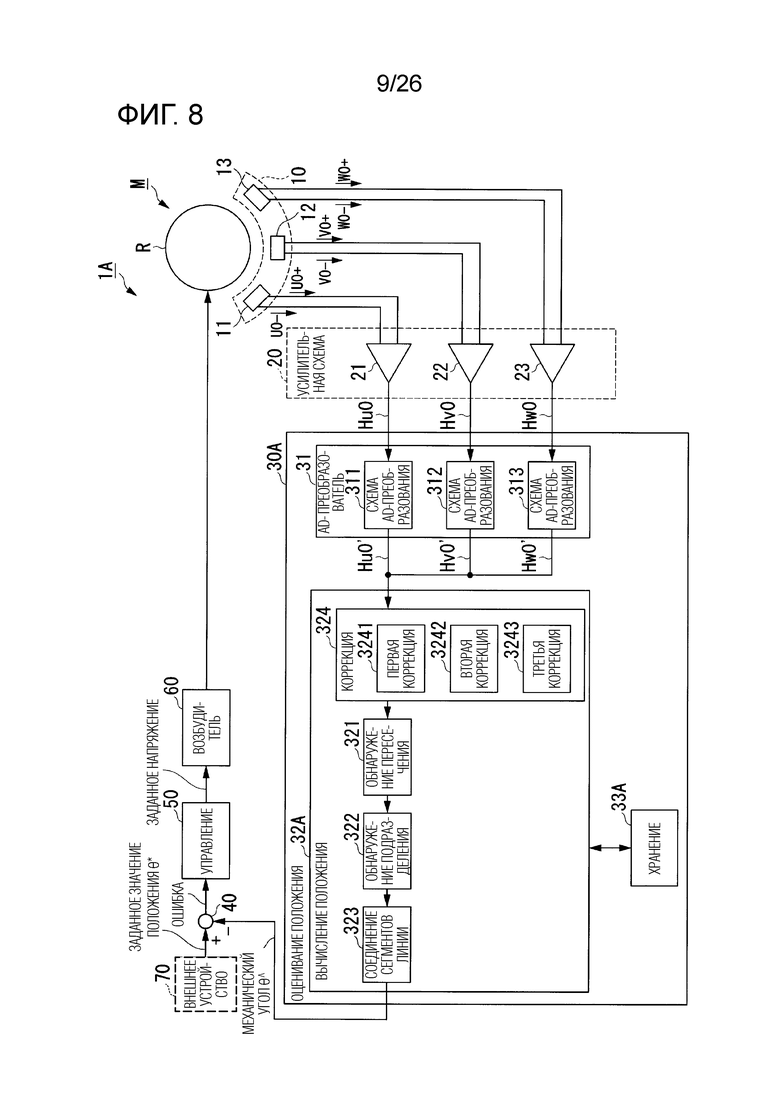
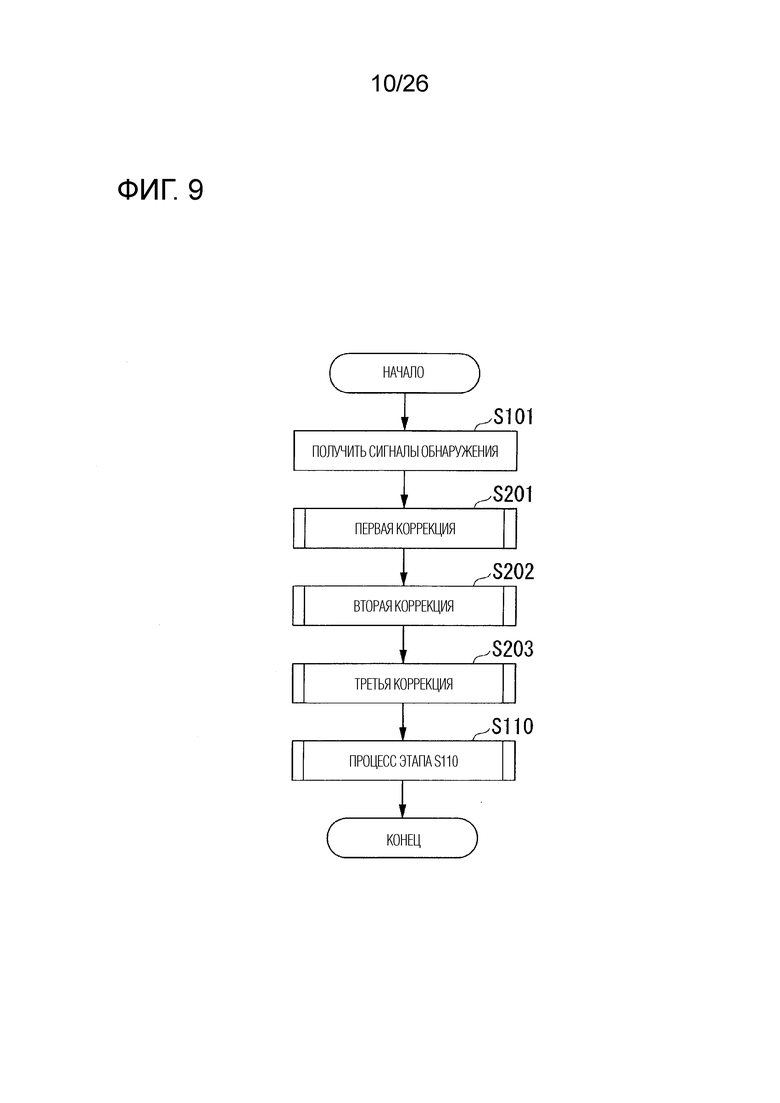
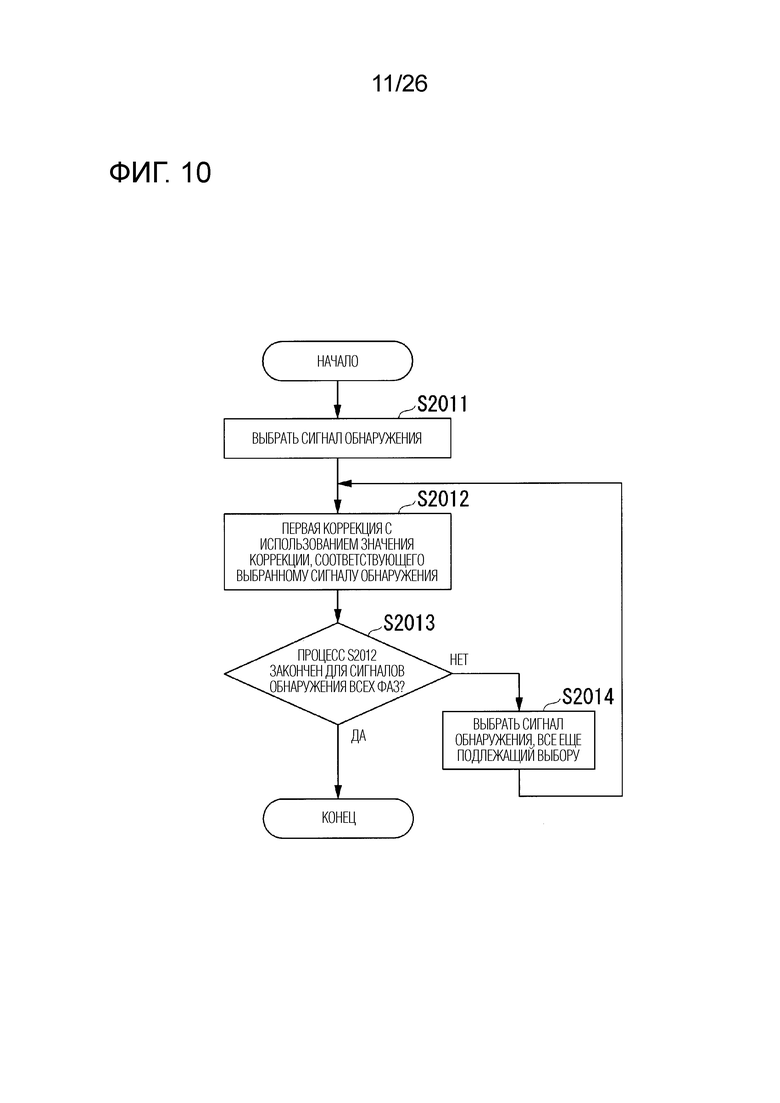
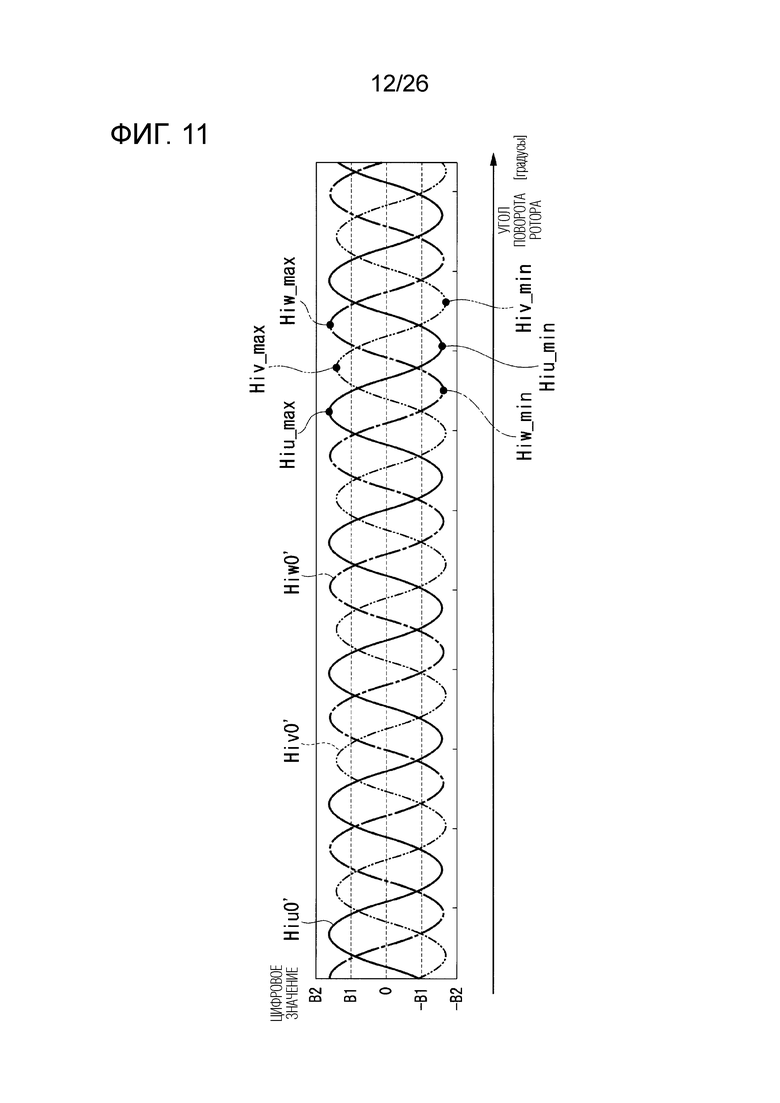
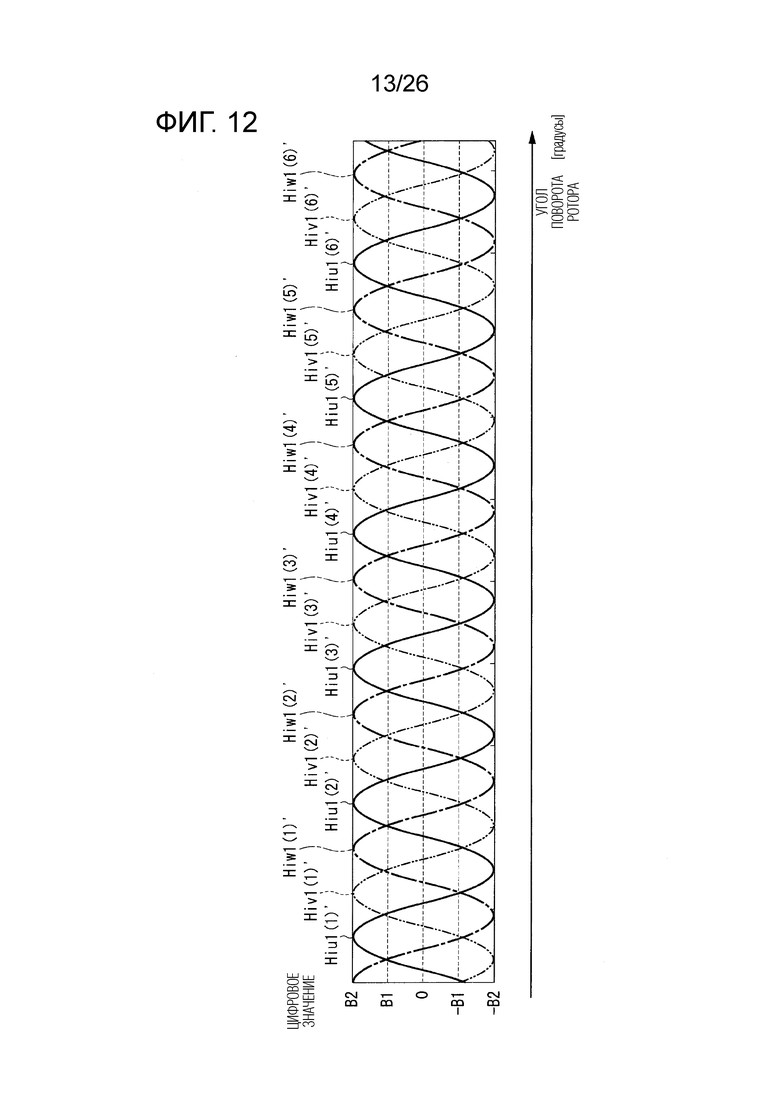
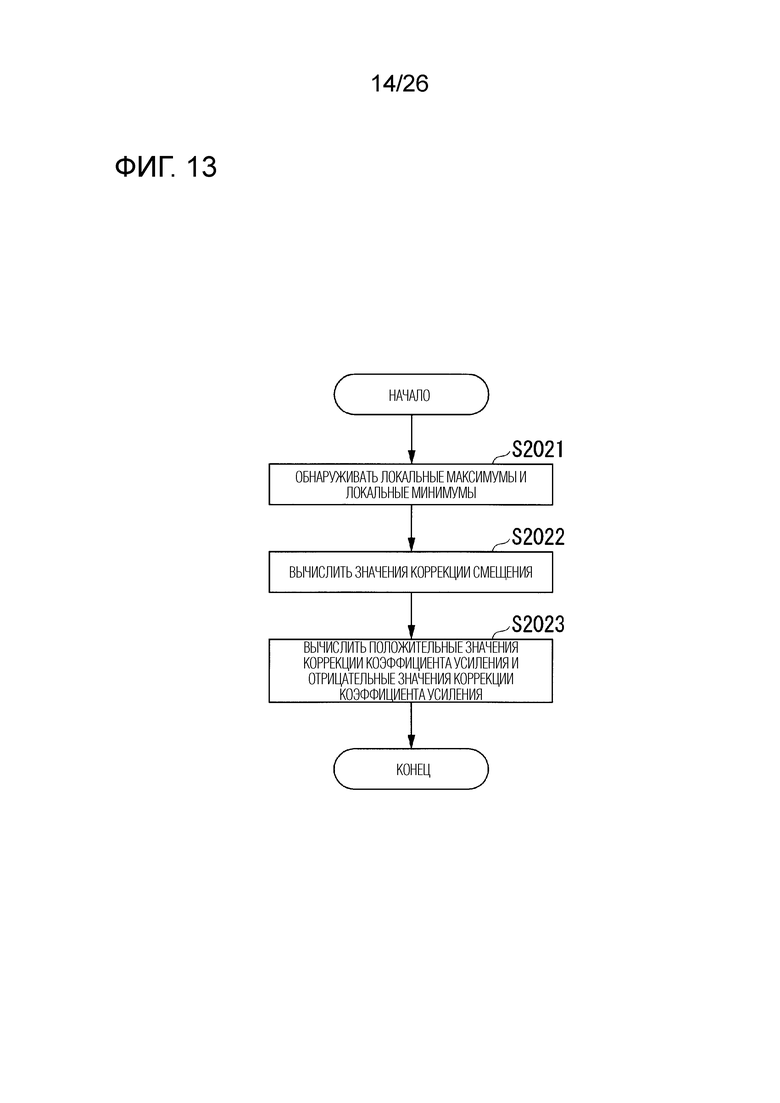
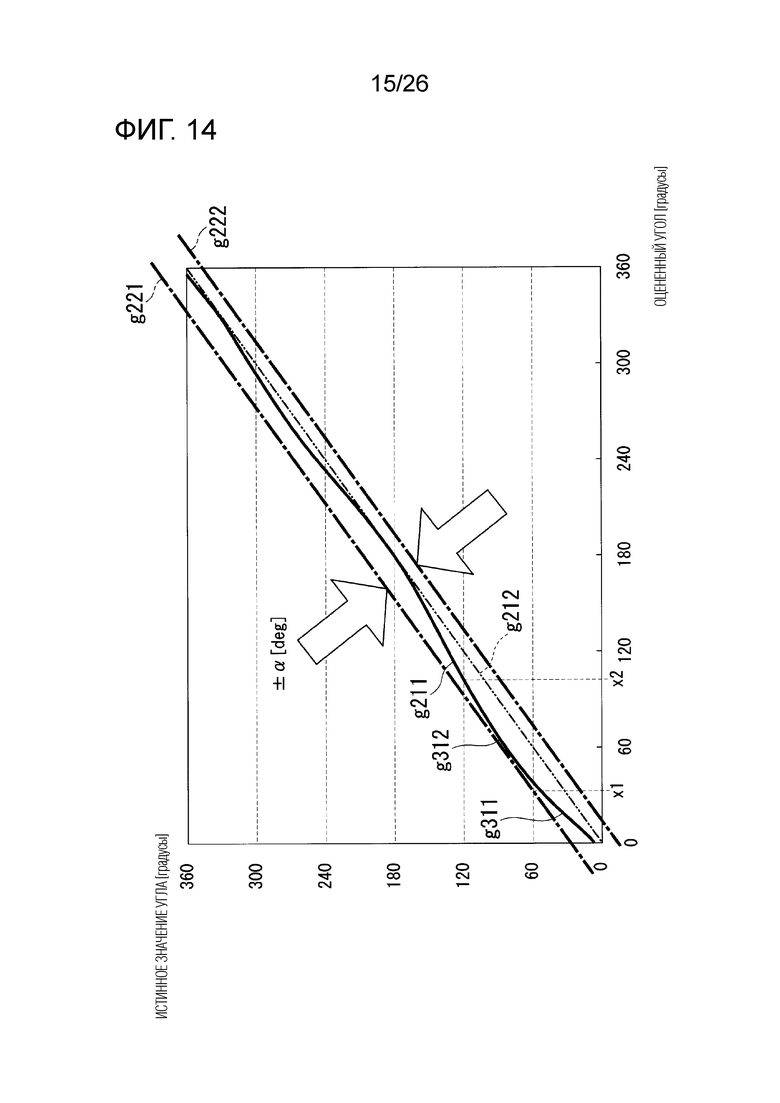
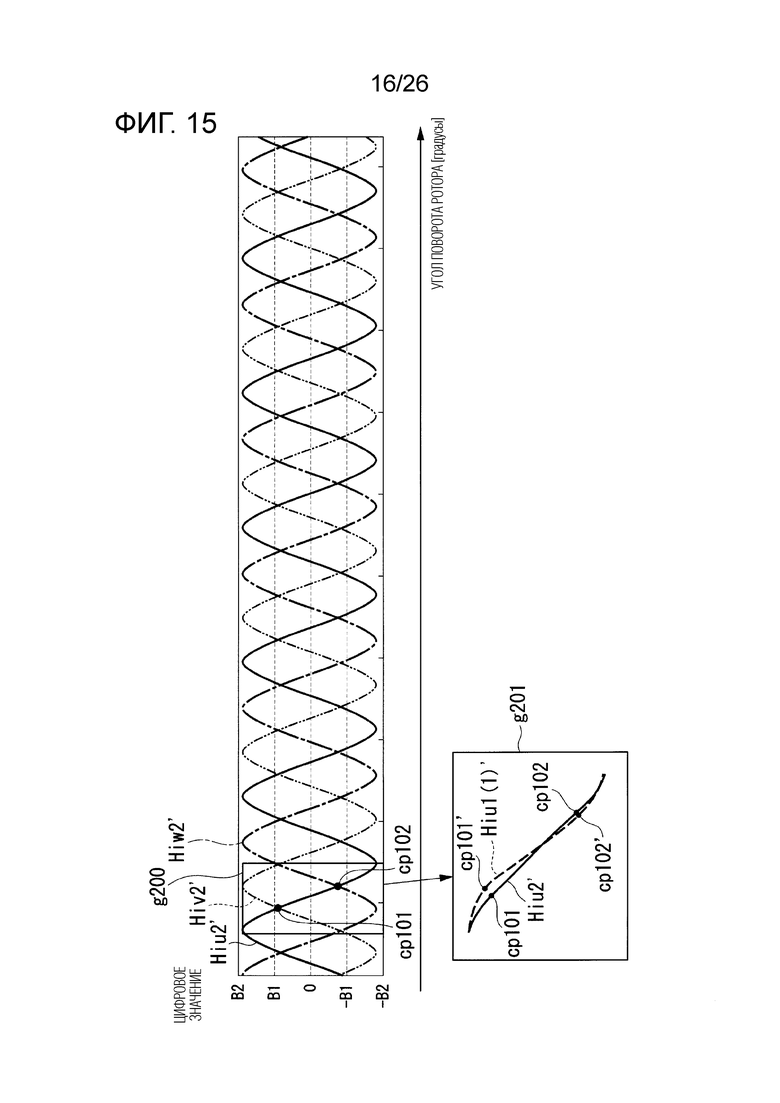
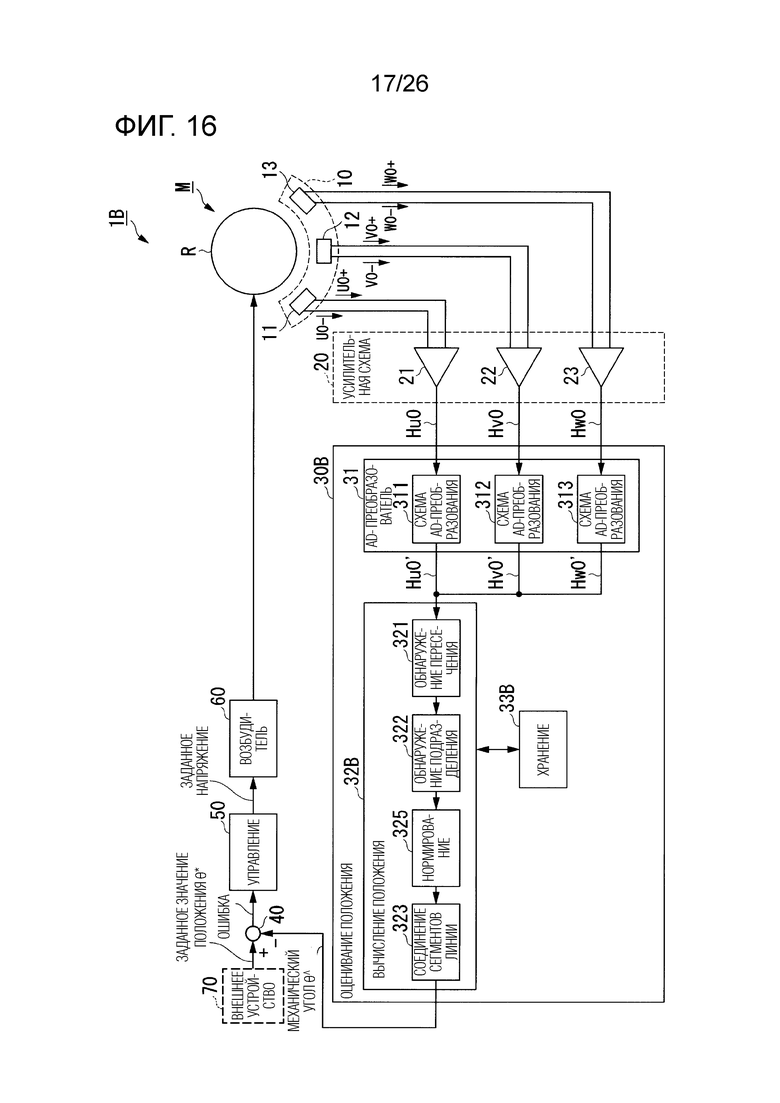


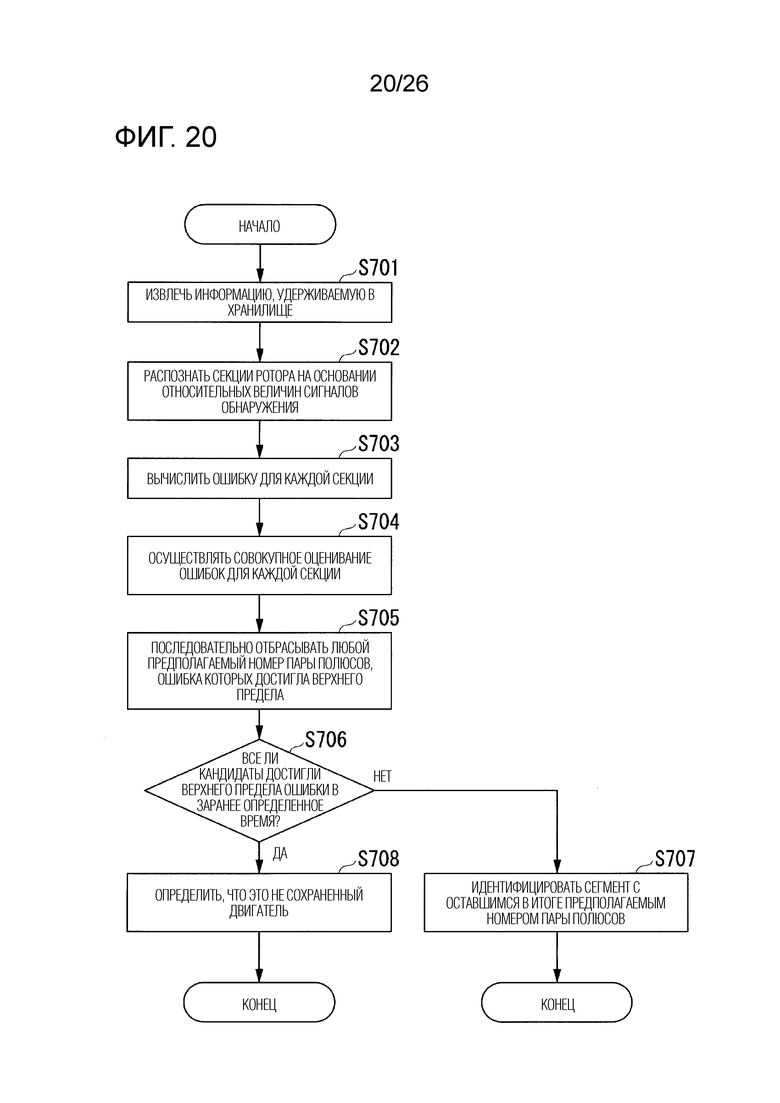
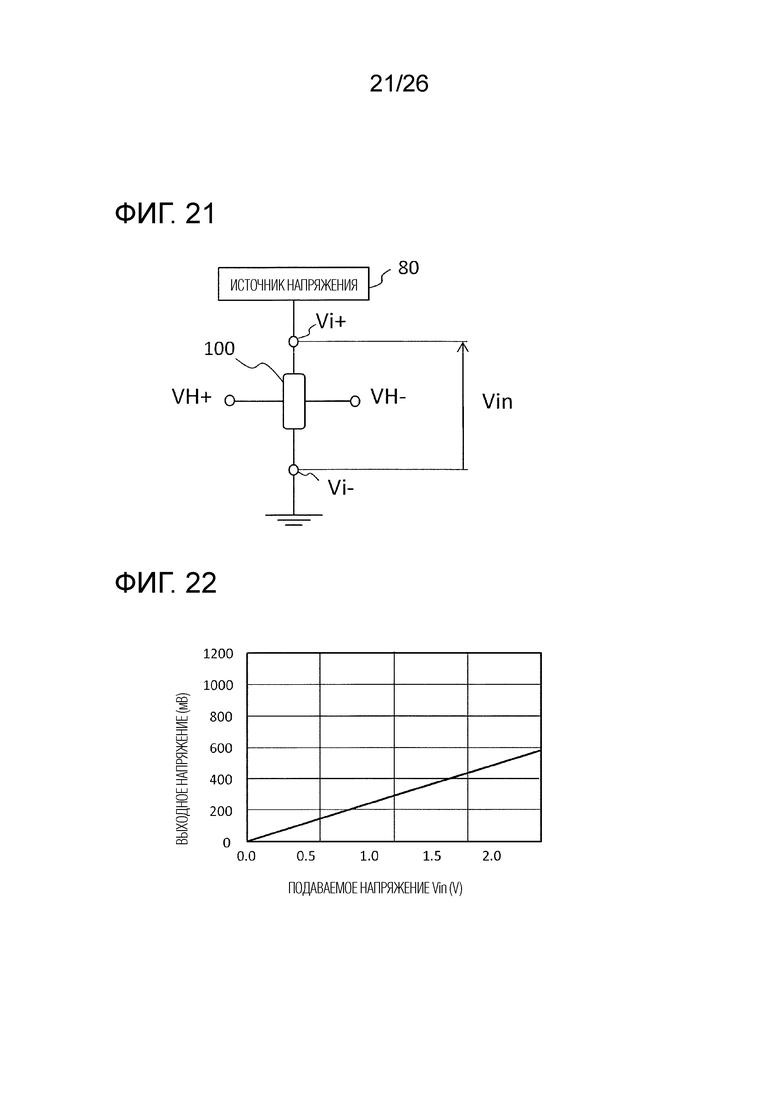


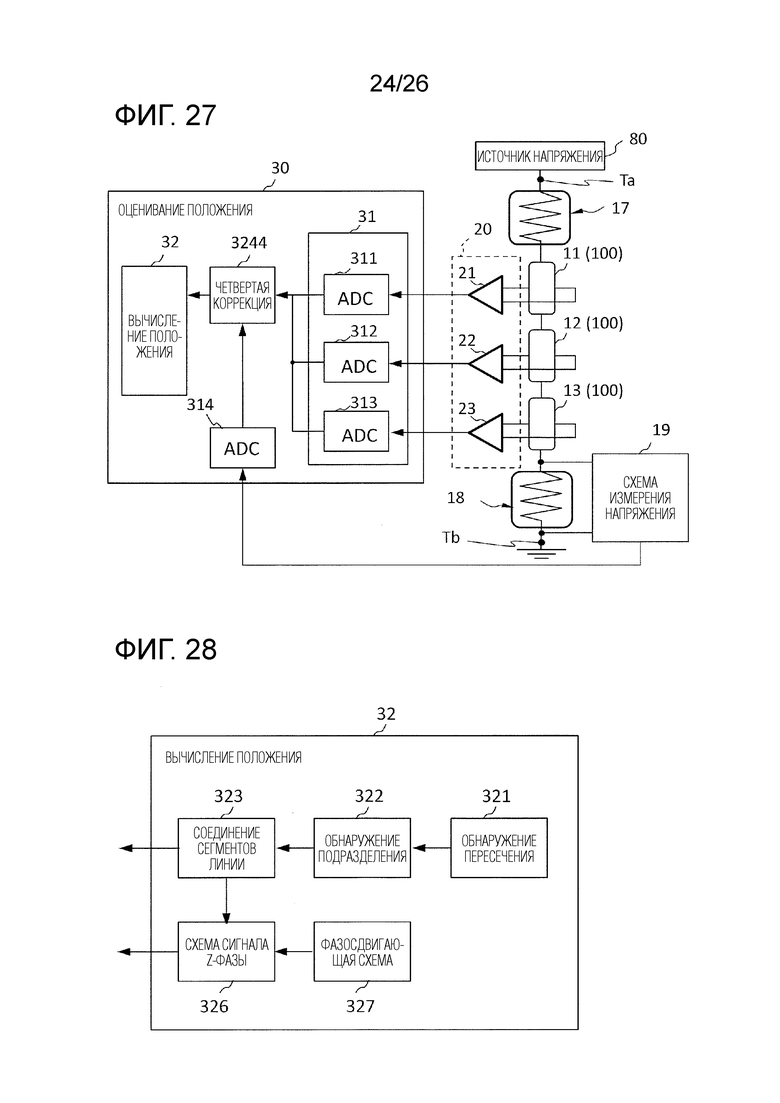
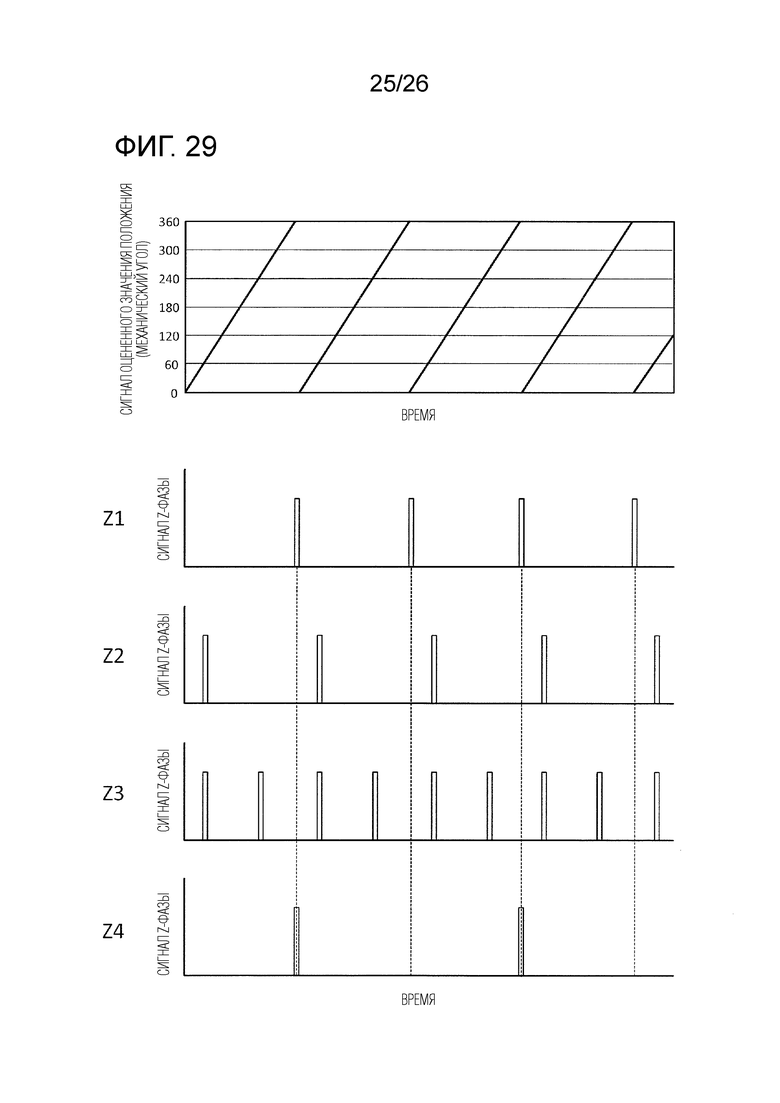
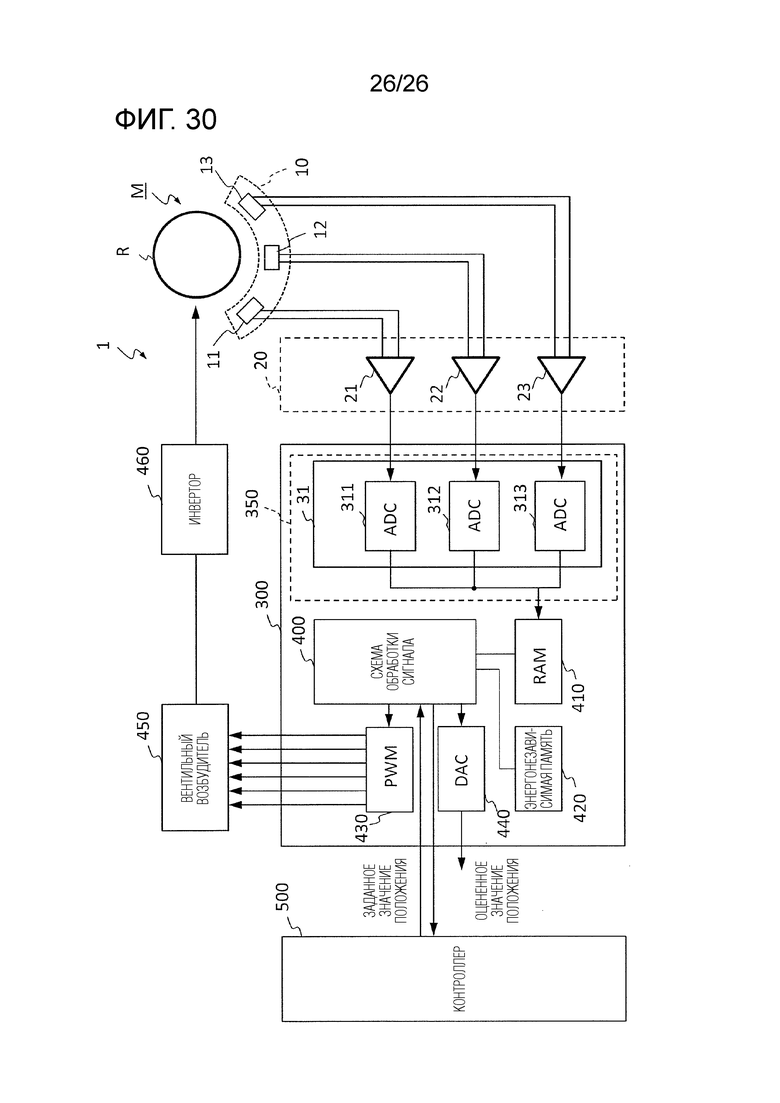
Изобретение относится к области электротехники и может быть использовано в устройствах управления положением двигателя. Техническим результатом является повышение точности обнаружения положения. Способ оценивания положения включает в себя: этап обнаружения сигнала, на котором каждый из N (где N - целое число, равное 3 или более) датчиков обнаруживает магнитное поле, которое соответствует положению подвижной части и выводит сигнал обнаружения в качестве электрического сигнала, причем сигналы обнаружения сдвинуты по фазе на угол, полученный делением 360 градусов на N; этап обнаружения пересечения, на котором секция обнаружения пересечения последовательно обнаруживает пересечение, на котором каждый сигнал обнаружения, выводимый на этапе обнаружения сигнала, пересекает другой; этап обнаружения подразделения, на котором секция обнаружения подразделения обнаруживает участок сигнала обнаружения, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, в качестве одного или более сигналов подразделения; и этап соединения сегментов линии, на котором секция соединения сегментов линии последовательно соединяет сигналы подразделения и оценивает положение подвижной части на основании множественных соединенных сигналов подразделения для генерации сигнала оцененного значения положения. 3 н. и 11 з.п. ф-лы, 31 ил.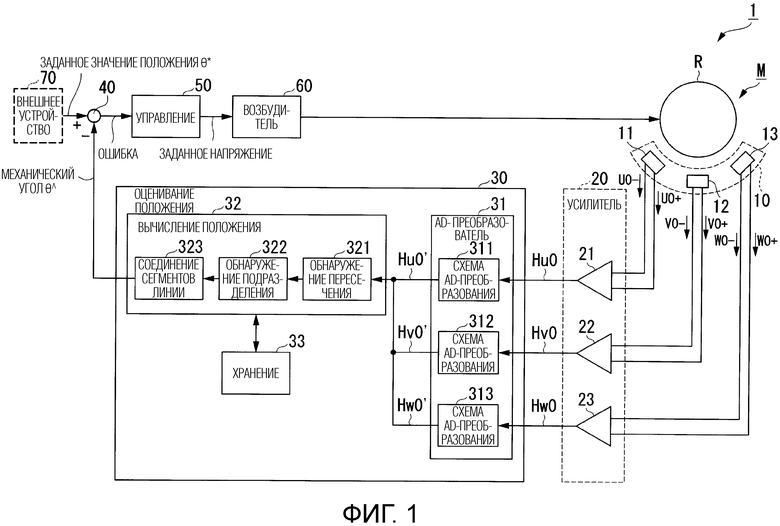
1. Способ оценивания положения, содержащий:
этап обнаружения сигнала, на котором каждый из N (где N - целое число, равное 3 или более) датчиков обнаруживает магнитное поле, которое соответствует положению подвижной части, и выводит сигнал обнаружения в качестве электрического сигнала, причем сигналы обнаружения сдвинуты по фазе на угол, полученный делением 360 градусов на N;
этап обнаружения пересечения, на котором секция обнаружения пересечения последовательно обнаруживает пересечение, на котором каждый сигнал обнаружения, выводимый на этапе обнаружения сигнала, пересекает другой;
этап обнаружения подразделения, на котором секция обнаружения подразделения обнаруживает участок сигнала обнаружения, который соединяет от пересечения к другому пересечению, которое является смежным для этого пересечения, в качестве одного или более сигналов подразделения; и
этап соединения сегментов линии, на котором секция соединения сегментов линии последовательно соединяет сигналы подразделения и оценивает положение подвижной части на основании множественных соединенных сигналов подразделения для генерации сигнала оцененного значения положения.
2. Способ оценивания положения по п. 1, в котором
на этапе обнаружения пересечения
между пересечением и другим пересечением, которое является смежным для этого пересечения, секция обнаружения пересечения последовательно обнаруживает пересечение нулевого уровня, на котором потенциал сигнала обнаружения пересекает опорное напряжение от пересечения; и
на этапе обнаружения подразделения
секция обнаружения подразделения обнаруживает в качестве первого сигнала подразделения, по меньшей мере, участок сигнала обнаружения от пересечения до пересечения нулевого уровня, которое является смежным для этого пересечения, и обнаруживает в качестве второго сигнала подразделения участок сигнала обнаружения от пересечения нулевого уровня до другого пересечения.
3. Способ оценивания положения по п. 1 или 2, в котором
на этапе обнаружения сигнала
количество N датчиков равно трем, так что три упомянутых сигнала обнаружения сдвинуты по фазе на 120 градусов; и
на этапе обнаружения пересечения
секция обнаружения пересечения обнаруживает пересечение, на котором сигнал обнаружения, обнаруженный на этапе обнаружения сигнала, пересекает другой.
4. Способ оценивания положения по любому из пп. 1-3, содержащий
этап первой коррекции, на котором секция коррекции последовательно выбирает один из сигналов обнаружения и вычитает среднее значение других невыбранных сигналов обнаружения из выбранного сигнала обнаружения, тем самым генерируя, для каждого сигнала обнаружения, сигнал обнаружения, до которого скорректирован выбранный сигнал обнаружения; и
на этапе обнаружения пересечения
секция обнаружения пересечения последовательно обнаруживает пересечение, на котором сигнал обнаружения, скорректированный на этапе первой коррекции, пересекает другой.
5. Способ оценивания положения по любому из пп. 1-4, содержащий:
этап обнаружения локального максимума/локального минимума, на котором, для сигнала обнаружения каждой фазы, секция коррекции обнаруживает локальный максимум и локальный минимум для соответствующей пары полюсов и максимальное значение амплитуды и минимальное значение амплитуды на цикл электрического угла в течение по меньшей мере двух циклов;
этап вычисления среднего, на котором, для сигнала обнаружения каждой фазы, секция коррекции вычисляет среднее максимальных значений амплитуды и среднее минимальных значений амплитуды;
этап вычисления смещения, на котором секция коррекции определяет значение коррекции смещения как среднее между максимальным и минимальным значениями, которое вычисляется из среднего максимальных значений амплитуды и среднего минимальных значений амплитуды;
этап вычисления первого коэффициента усиления, на котором, для каждого сигнала обнаружения, секция коррекции вычисляет положительное значение коррекции коэффициента усиления для соответствующей пары магнитных полюсов, которое приравнивает локальный максимум с заранее определенным максимальным значением;
этап вычисления второго коэффициента усиления, на котором, для сигнала обнаружения каждой фазы, секция коррекции вычисляет отрицательное значение коррекции коэффициента усиления для соответствующей пары магнитных полюсов, которое приравнивает локальный минимум с заранее определенным минимальным значением; и
этап второй коррекции, на котором, для сигнала обнаружения каждой фазы, секция коррекции прибавляет значение коррекции смещения, перемножает положительное значение сигнала из соответствующей пары магнитных полюсов с положительным значением коррекции коэффициента усиления и перемножает отрицательное значение сигнала из соответствующей пары магнитных полюсов с отрицательным значением коррекции коэффициента усиления, причем
на этапе обнаружения пересечения
секция обнаружения пересечения последовательно обнаруживает пересечение, на котором сигнал обнаружения, скорректированный на этапе второй коррекции, пересекает другой.
6. Способ оценивания положения по п. 5, содержащий
этап третьей коррекции, на котором секция коррекции перемножает каждый сигнал обнаружения с заранее определенным коэффициентом на основании состояния формы волны сигнала обнаружения, причем
на этапе обнаружения пересечения
секция обнаружения пересечения последовательно обнаруживает пересечение, на котором сигнал обнаружения, скорректированный на этапе третьей коррекции, пересекает другой.
7. Способ оценивания положения по любому из пп. 1-6, содержащий:
этап измерения, на котором, когда подвижная часть вращается с заранее определенным числом оборотов, секция нормирования измеряет длительность каждого сигнала подразделения, длительность, необходимую для того, чтобы подвижная часть совершила один оборот, и приращение значения сигнала на протяжении каждого сигнала подразделения или длины сегмента линии сигнала подразделения;
этап вычисления механического угла, на котором, на основании длительности каждого сигнала подразделения, измеренной на этапе измерения, и длительности, необходимой для того, чтобы подвижная часть совершила один оборот, секция нормирования вычисляет механический угол для каждого сигнала подразделения;
этап вычисления нормирующего коэффициента, на котором секция нормирования вычисляет нормирующий коэффициент для каждого сигнала подразделения делением механического угла, вычисленного на этапе вычисления механического угла, на значение сигнала или длину сегмента линии, измеренную на этапе измерения; и
этап нормирования, на котором секция нормирования корректирует механический угол посредством нормирования перемножением, для каждого сигнала подразделения, нормирующего коэффициента, вычисленного на этапе вычисления нормирующего коэффициента, со значением сигнала или длиной сегмента линии вновь обнаруженного сигнала подразделения.
8. Способ оценивания положения по п. 7, содержащий этап вычисления механического угла, на котором секция нормирования вычисляет текущий механический угол путем, в течение периода, необходимого для того, чтобы подвижная часть совершила один оборот, прибавления механического угла, скорректированного на этапе нормирования, к механическому углу из вновь обнаруженного непосредственно предыдущего сигнала подразделения.
9. Способ оценивания положения по п. 8, содержащий:
этап хранения, на котором, когда подвижная часть вращается с заранее определенным числом оборотов, секция оценивания положения предписывает сохранять удерживаемую информацию, вычисленную на этапе измерения или этапе вычисления механического угла, в секции хранения заранее;
этап определения секции, на котором, на основании относительных величин всех сигналов обнаружения, секция оценивания положения распознает множество упомянутых сигналов подразделения;
этап вычисления ошибки, на котором секция оценивания положения вычисляет ошибки между механическими углами, соответствующими множеству сигналов подразделения, сохраненных на этапе хранения, и механическими углами, скорректированными на этапе нормирования;
этап оценки, на котором секция оценивания положения осуществляет совокупную оценку ошибок, вычисленных на этапе вычисления ошибки; и
этап идентификации положения, на котором секция оценивания положения последовательно отбрасывает любой предполагаемый сигнал подразделения, ошибка которого достигла верхнего предела, и идентифицирует оставшийся в итоге предполагаемый сигнал подразделения как механическое положение подвижной части.
10. Способ оценивания положения по п. 9, содержащий
этап определения, на котором, когда все предполагаемые сигналы подразделения достигают верхнего предела ошибки в течение заранее определенного времени, секция оценивания положения определяет, что подвижная часть не является подвижной частью, для которой на этапе хранения осуществлялось хранение.
11. Способ оценивания положения по любому из пп. 1-10, в котором
N датчиков последовательно соединены с источником напряжения через резисторный элемент, причем способ содержит
этап температурной компенсации, на котором обнаруживается значение напряжения на любом из N датчиков или резисторном элементе и сигнал обнаружения корректируется на основании значения обнаруженного напряжения.
12. Способ оценивания положения по любому из пп. 1-11, в котором, на этапе соединения сегментов линии, сигнал Z-фазы, указывающий опорное положение подвижной части, выводится синхронно с обнаружением одного или более конкретных сигналов подразделения, выбранных из множественных соединенных сигналов подразделения.
13. Устройство оценивания положения, которое оценивает положение подвижной части, имеющей множество магнитных полюсов, причем устройство оценивания положения содержит:
N (где N - целое число, равное 3 или более) датчиков для обнаружения магнитных полей, созданных множеством магнитных полюсов, причем каждый из N датчиков выводит сигнал обнаружения, величина которого соответствует напряженности обнаруженного магнитного поля, и N датчиков расположены так, что N сигналов обнаружения сдвинуты по фазе на угол, равный 360 градусов/N;
схему предобработки для генерации N скорректированных сигналов обнаружения из N сигналов обнаружения;
схему обработки сигнала для генерации и вывода сигнала, указывающего оцененное значение положения подвижной части на основании N скорректированных сигналов обнаружения; и
носитель данных, подключенный к схеме обработки сигнала и имеющий сохраненную на нем компьютерную программу для управления работой схемы обработки сигнала, причем
в соответствии с инструкциями компьютерной программы схема обработки сигнала осуществляет:
последовательное обнаружение пересечения, на котором два сигнала из N скорректированных сигналов обнаружения пересекаются друг с другом;
подразделение скорректированного сигнала обнаружения, который связывает от пересечения к другому пересечению, которое является смежным для этого пересечения, на один или более сегментов и обнаружение каждого сегмента в качестве сигнала подразделения; и
последовательное соединение сигналов подразделения, на основании множественных соединенных сигналов подразделения, определение оцененного значения положения подвижной части из уровней сигналов подразделения и вывод сигнала, указывающего оцененное значение положения.
14. Устройство управления положением, которое управляет положением подвижной части, причем устройство управления положением содержит:
устройство оценивания положения по п. 13;
схему возбуждения для возбуждения подвижной части; и
схему управления, подключенную к схеме возбуждения для подачи заданного значения напряжения на схему возбуждения, причем схема управления определяет заданное значение напряжения на основании сигнала, указывающего оцененное значение положения подвижной части, полученного из устройства оценивания положения, и на основании заданного значения положения, которое вводится из внешнего устройства.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2408127C1 |
| СПОСОБ ЗАПУСКА ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2403432C2 |
| JPH 09121584 A, 06.05.1997 | |||
| JP 2009055649 A, 12.03.2009 | |||
| US 8872453 B2, 28.10.2014 | |||
| US 2012280641 A, 08.11.2012 | |||
| СПОСОБ РЕВАСКУЛЯРИЗАЦИИ ДНА ЖЕЛУДКА | 2003 |
|
RU2242173C2 |

