Изобретение относится к подводным обитаемым и необитаемым аппаратам с автоматическим и телеуправляемым регулированием, преимущественно тихоходным, используемым для освоения мирового океана.
Известны подводные аппараты, в которых для регулирования плавучести подводного аппарата изменяют объем забортной воды в балластных цистернах. Для забора воды стравливают воздух из балластных цистерн, при этом происходит погружение подводного аппарата, а для всплытия выдавливают воду из балластных цистерн, подавая в них воздух из резервуара сжатого воздуха (см., например, С.Н. Прасолов и др. «Устройство подводных лодок», 1973 г.).
Известны также подводные аппараты, в которых для регулирования плавучести изменяют объем камер плавучести, представляющих собой гибкие оболочки, подавая в оболочки воздух из резервуара со сжатым воздухом или стравливая воздух за борт (см., например, патент РФ №2120883 на изобретение «Подводная лодка», патент РФ №2120882 на изобретение «Подводная лодка», патент РФ №24787 на полезную модель «Подводный аппарат с крыльями»). При таком способе регулирования плавучести для всплытия аппарата в оболочку подают сжатый воздух из резервуара, вследствие чего объем оболочки увеличивается и аппарат всплывает. Для погружения аппарата стравливают часть воздуха из оболочки, объем оболочки уменьшается и аппарат погружается. При каждом таком всплытии и погружении расходуется часть воздуха, запасенного в резервуаре сжатого воздуха, что при частых перемещениях аппарата вверх и вниз ограничивает время его пребывания под водой.
Задачей заявляемого изобретения является уменьшение расхода хранимого на подводном аппарате сжатого воздуха при частых погружениях и всплытиях и тем самым увеличение времени нахождения подводного аппарата под водой.
Технический результат настоящего изобретения состоит в том, что изменение плавучести подводного аппарата на уже достигнутой заданной глубине осуществляется изменением объема камер плавучести путем их сжатия и растяжения, не используя при этом сжатый воздух, оставшийся в резервуаре сжатого воздуха, после опускания на эту заданную глубину и экономя его на предстоящее всплытие.
Указанный технический результат достигают тем, что регулирование плавучести подводного аппарата, включающего заполненные воздухом камеры плавучести, путем изменения их объема за счет подачи в них воздуха или выпуска из них воздуха осуществляют так, что достижение подводным аппаратом заданной глубины производят частичным выпуском воздуха из камер плавучести, а дальнейшее дополнительное изменение глубины погружения подводного аппарата - только сжатием или растяжением камер плавучести с помощью внешнего механического воздействия на камеры плавучести. При этом оставшуюся часть воздуха, находящегося в камерах плавучести, используют на всплытие. Практически это осуществляют следующим образом: у подводного аппарата, имеющего резервуар сжатого воздуха, гибкие оболочки, образующие камеры плавучести, резервуар со сжатым воздухом и систему управления подачей воздуха в камеры плавучести, а также устройства сжатия-растяжения камер плавучести, для погружения аппарата под воду частично стравливают воздух из камер плавучести, оставляя в них примерно половину первоначального объема, и при достижении необходимой глубины для дополнительного погружения уменьшают объем камер плавучести, сжимая камеры плавучести с помощью устройства сжатия-растяжения, а для частичного всплытия увеличивают объем камер плавучести, растягивая камеры плавучести с помощью устройства сжатия-растяжения, причем для полного всплытия на поверхность увеличивают объем камер плавучести до полного объема, добавляя в камеры плавучести воздух из резервуара сжатого воздуха.
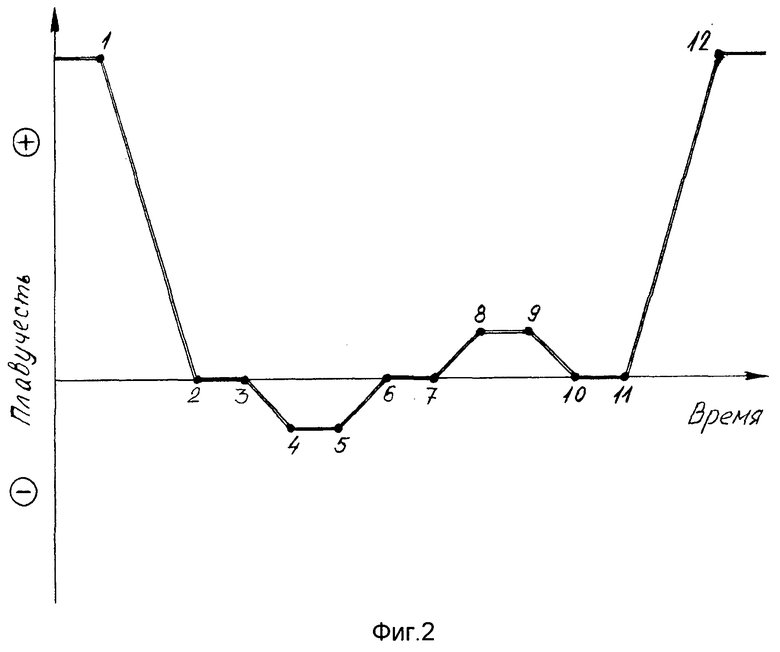
Для пояснения заявляемого способа представлены на фиг.1 - схема подводного аппарата и на фиг.2 - диаграмма изменения плавучести подводного аппарата при работе на заданной глубине.
На фиг.1 изображен подводный аппарат 1 с камерами плавучести 2 и 3, резервуаром сжатого воздуха 4, устройствами сжатия-растяжения камер плавучести в виде гидроцилиндров 5 и 6, системой управления подачей сжатого воздуха, состоящей из редуктора 7, распределителей 8 и 9, клапанов 10, 11, 12, 13, устройств выхлопа 14 и 15, системой управления гидроцилиндрами, состоящей из гидростанции 16, регулятора давления 17, распределителей 18 и 19. Для реализации заявляемого способа необходимо использовать камеры плавучести 2 и 3, представляющие собой гибкие оболочки, позволяющие под действием продольного усилия изменять свою длину без существенного изменения поперечного сечения. Таким свойством обладают, например, цилиндрические гибкие рукава, армированные металлическими кольцами или винтовой спиралью, металлические и резинотканевые сильфоны, мембранные камеры.
Плавучесть подводного аппарата регулируют следующим образом. Для погружения аппарата под воду открывают проход воздуха из камер плавучести 2 и 3 к устройствам выхлопа 12 и 13 через распределители 8 и 9 и уменьшают объем камер плавучести 2 и 3 примерно до половины, сдавливая камеры плавучести гидроцилиндрами 5 и 6, подавая в них рабочую жидкость из гидростанции 16 через распределители 18 и 19. При достижении заданной глубины перекрывают выход воздуха из камер плавучести 2 и 3 с помощью распределителей 8 и 9. Для дополнительного погружения аппарата от достигнутой заданной глубины уменьшают объем камер плавучести 2 и 3, сжимая их с помощью гидроцилиндров 5 и 6, для чего с помощью распределителей 18 и 19 подают в них рабочую жидкость из гидростанции 16. Для частичного подъема аппарата от достигнутой глубины увеличивают объем камер плавучести 2 и 3, растягивая их с помощью гидроцилиндров 5 и 6.
Описанная процедура поясняется диаграммой на фиг.2. Перевод аппарата на базовую заданную глубину, на диаграмме участок 1-2-3, осуществляется за счет выпуска части воздуха из камер плавучести 2 и 3. На участке 3-4 производится сжатие камер плавучести 2 и 3 без выпуска воздуха и перевод аппарата в режим частичного погружения, что соответствует участку 4-5. На участке 5-6 производится прекращение сжатия камер плавучести 2 и 3 и аппарат переводится в режим зависания на новой глубине, что соответствует участку 6-7. На участке 7-8 производится растяжение камер плавучести 2 и 3, вследствие чего на участке 8-9 происходит частичное всплытие. На участке 9-10 производится прекращение растяжения камер плавучести, а на участке 10-11 производится зависание аппарата на следующей глубине. Чередование частичных погружений и всплытий, которое показано на участке 2-11, может происходить многократно без нагнетания и стравливания воздуха из камер плавучести. На участке 11-12 производится всплытие аппарата за счет подачи воздуха в камеры плавучести 2 и 3. Для придания дифферента подводному аппарату одну камеру, например камеру 2, из камер плавучести 2 или 3 сжимают, а другую, например 3, растягивают, подавая рабочую жидкость в соответствующие полости гидроцилиндров 5 и 6. Аналогичным образом можно регулировать крен подводного аппарата 1. Для этого камеры плавучести 2 и 3 размещают по бортам подводного аппарата, а сжимают камеры одного борта и растягивают камеры другого борта. При этом погружение аппарата 1, всплытие, создание дифферента и крена производятся без выпуска воздуха из камер плавучести 2 и 3.
Реализация предлагаемого способа позволяет уменьшить расход сжатого воздуха, увеличить время пребывания аппарата под водой.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529589C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА, ИСПОЛЬЗУЮЩЕЕ ТЕПЛОВУЮ ЭНЕРГИЮ ОКРУЖАЮЩЕЙ СРЕДЫ | 1998 |
|
RU2130401C1 |
| Подводный аппарат | 2016 |
|
RU2703558C1 |
| ПОГРУЖНОЕ САДКОВОЕ УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ РЫБЫ | 1996 |
|
RU2105471C1 |
| САДОК ДЛЯ ВЫРАЩИВАНИЯ РЫБ, РАКООБРАЗНЫХ ИЛИ МОЛЛЮСКОВ | 1993 |
|
RU2063132C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЛУБИНЫ ГЛУБОКОВОДНОГО ДРЕЙФУЮЩЕГО ПРИБОРА | 2004 |
|
RU2290339C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАВУЧЕСТЬЮ ПРОНИЦАЕМОГО ПОДВОДНОГО АППАРАТА | 2005 |
|
RU2296693C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВСПЛЫТИЕМ ПОДВОДНОЙ ЛОДКИ, НЕ ИМЕЮЩЕЙ ХОДА, В ПОДЛЕДНОМ ПЛАВАНИИ И СПОСОБ УПРАВЛЕНИЯ ВСПЛЫТИЕМ | 2015 |
|
RU2621926C2 |
| Способ регулирования плавучести буя и устройство для его осуществления | 1983 |
|
SU1119918A1 |
| СПОСОБ СОЗДАНИЯ ПОЛОЖИТЕЛЬНОЙ ПЛАВУЧЕСТИ В ОКЕАНСКОЙ И МОРСКОЙ СРЕДЕ | 2002 |
|
RU2222458C2 |
Изобретение относится к подводным обитаемым и необитаемым аппаратам, используемым для освоения мирового океана. Способ регулирования плавучести подводного аппарата включает заполненные воздухом камеры плавучести, изменение объёма которых осуществляют за счет подачи в них воздуха или выпуска из них воздуха. При достижении подводным аппаратом заданной глубины осуществляют частичный выпуск воздуха из камер плавучести, а дальнейшее дополнительное изменение глубины погружения подводного аппарата - только сжатием или растяжением камер плавучести с помощью внешнего механического воздействия на камеры плавучести. Обеспечивается уменьшение расхода сжатого воздуха при частых погружениях и всплытиях, что увеличивает время нахождения подводного аппарата под водой. 2 ил.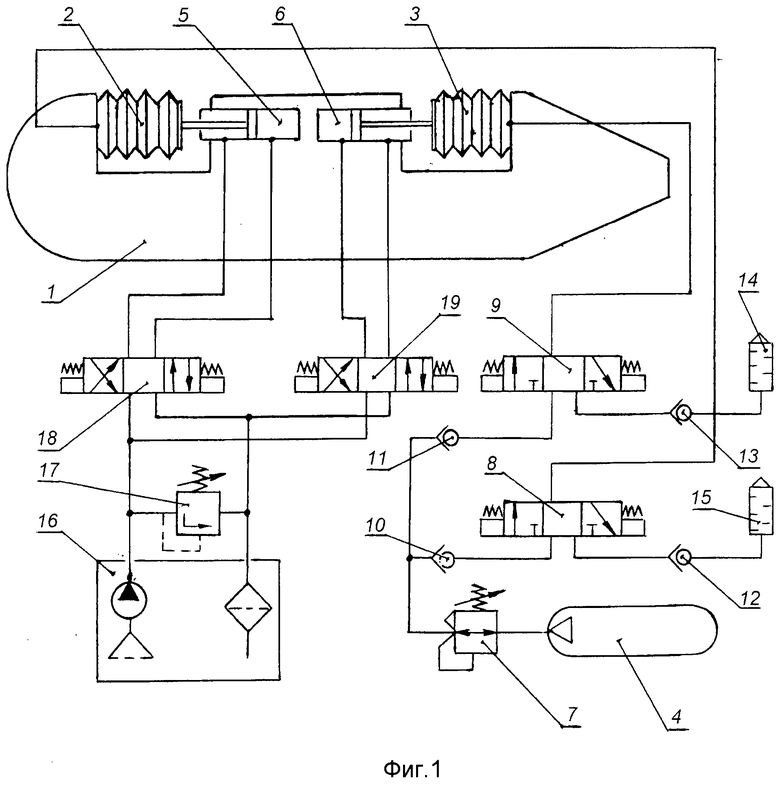
Способ регулирования плавучести подводного аппарата, включающий заполнение воздухом камер плавучести путем изменения их объема за счет подачи в них воздуха или выпуска из них воздуха, отличающийся тем, что достижение подводным аппаратом заданной глубины осуществляют частичным выпуском воздуха из камер плавучести, а дальнейшее дополнительное изменение глубины погружения подводного аппарата - только сжатием или растяжением камер плавучести с помощью внешнего механического воздействия на камеры плавучести.
| Прибор для непрерывного лабораторного получения газов | 1929 |
|
SU24987A1 |
| СПОСОБ УПРАВЛЕНИЯ ОСТАТОЧНОЙ ПЛАВУЧЕСТЬЮ ПОДВОДНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2086463C1 |
| US 3520263 A, 14.07.1970 | |||

