Изобретение относится к подводным необитаемым телеуправляемым аппаратам, предназначенным для осмотровых и технологических операций, осуществляемых в толще воды.
Подводные телеуправляемые аппараты состоят из корпуса, обычно в виде каркаса в форме параллелепипеда, блока плавучести, движителей, манипуляторов и другого технологического оборудования.
Известен малогабаритный телеуправляемый подводный аппарат (см., например, патент RU №2387570), содержащий раму модульной конструкции, движители горизонтального и вертикального хода, прочные герметичные контейнеры для размещения электронной части подводного аппарата, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, надводный модуль управления, включающий пульт управления, источник электропитания, блок отображения видеоинформации, и кабель связи, соединяющий подводный аппарат с надводным модулем. На другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр схвата манипулятора, подводный аппарат снабжен съемным перфорированным контейнером для сбора образцов, установленным в верхней части подводного аппарата соосно с его вертикальной осью, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части. При этом для перемещения этот аппарат использует винтовые движители, которые во избежание повреждений при спуске и подъеме аппарата размещают внутри защитного каркаса. Для обеспечения пространственных маневров: вперед-назад, вправо-влево, вверх-вниз, количество движителей увеличено, и оно составляет 8 штук.
Однако размещение движителей внутри контура каркаса аппарата ухудшает условия работы движителей, уменьшает размер пространства для технологического оборудования аппарата, подсасывает забортные загрязнения внутрь каркаса аппарата.
Для повышения маневренности аппарата и сокращения количества движителей известно предложение об установлении движителей внутри каркаса на вертикальных поворотных стойках или колоннах (см., например, сайт фирмы «SPERRE», Норвегия http://sperre-as.com - прототип). Это сокращает количество движителей для перемещения в горизонтальной плоскости, но по-прежнему требует дополнительной пары движителей для перемещения вверх-вниз. Для безопасности при спуске, подъеме и заведении подводного аппарата в док-станцию, движители располагают внутри контура каркаса аппарата. Для обеспечения притока забортной воды к движителям применяют разряженную компоновку оборудования, вследствие чего размеры аппарата приходится увеличивать.
Технический результат, получаемый при реализации заявляемого изобретения, заключается в упрощении конструкции за счет сокращения количества движителей при одновременном повышении маневренности подводного аппарата с сохранением возможного безопасного спуска, подъема и докования, т.е. расположения подводного аппарата в док-станции.
Указанный технический результат достигается тем, что в подводном аппарате, содержащем корпус в форме прямоугольного параллелепипеда, блок плавучести, технологическое оборудование и движители, установленные на вертикальных поворотных колоннах, вертикальные поворотные колонны размещены во внутренних углах корпуса подводного аппарата и снабжены поворотными горизонтальными приводами, к которым присоединены движители, при этом корпус подводного аппарата имеет внутри ниши, соответствующие контурам движителей при их парковке, кроме того, вертикальные поворотные колонны снабжены приводами с возможностью поворота их на угол, по крайней мере, 180°, а горизонтальные приводы, к которым присоединены движители, имеют возможность поворота, по крайней мере, на угол ±90° от исходного положения, соответствующего парковке движителей в нишах внутри корпуса подводного аппарата.
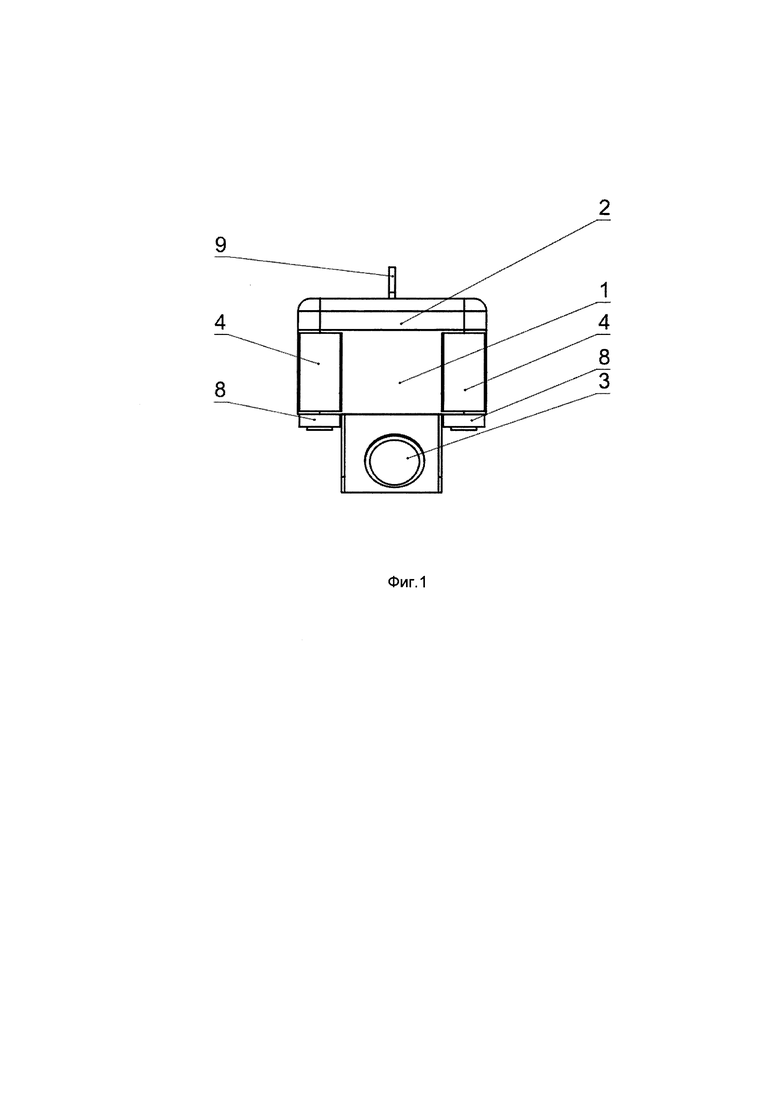
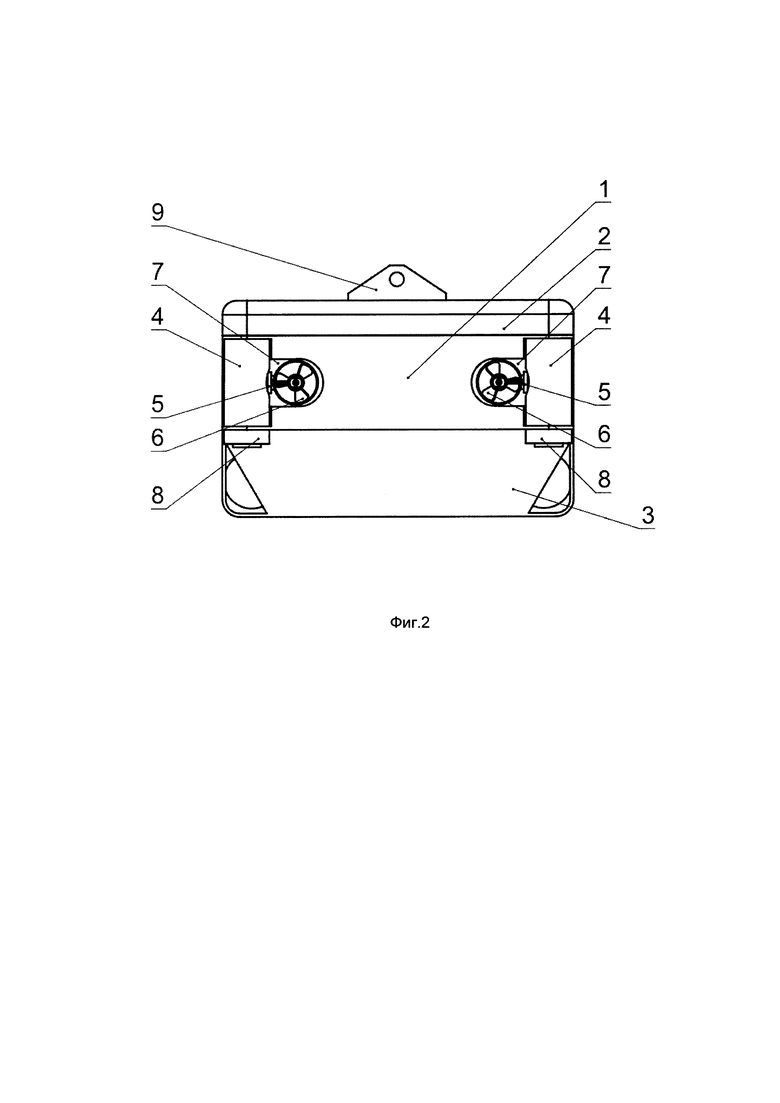
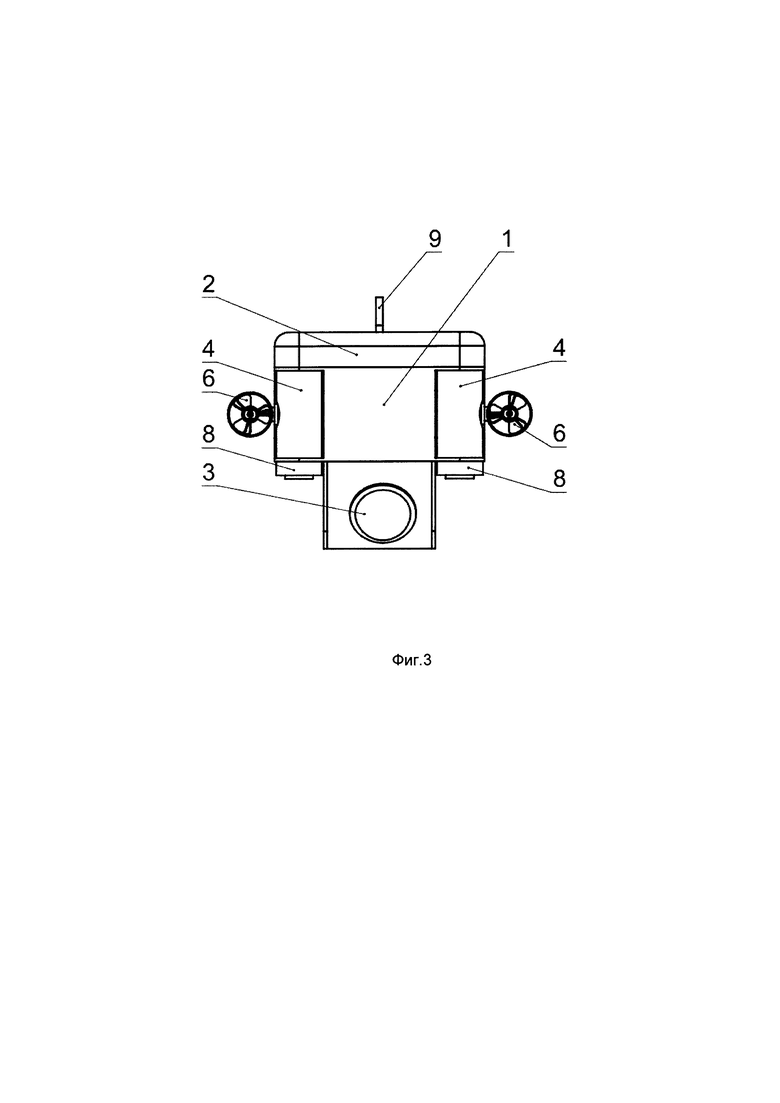
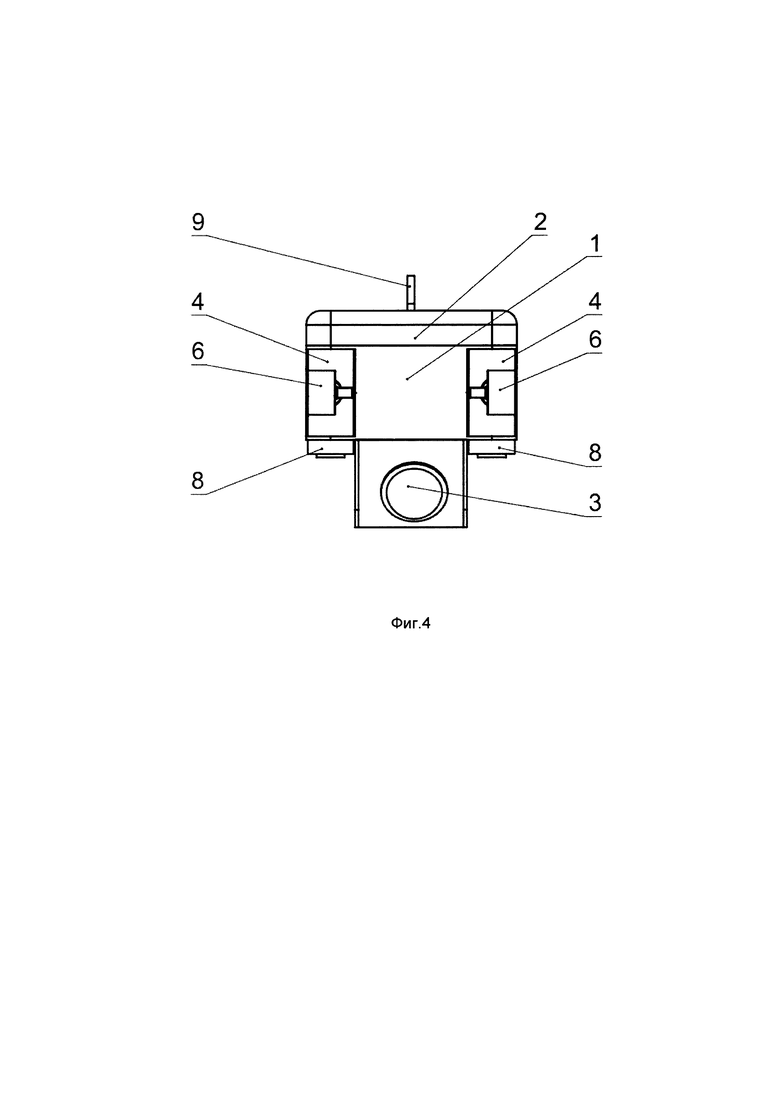
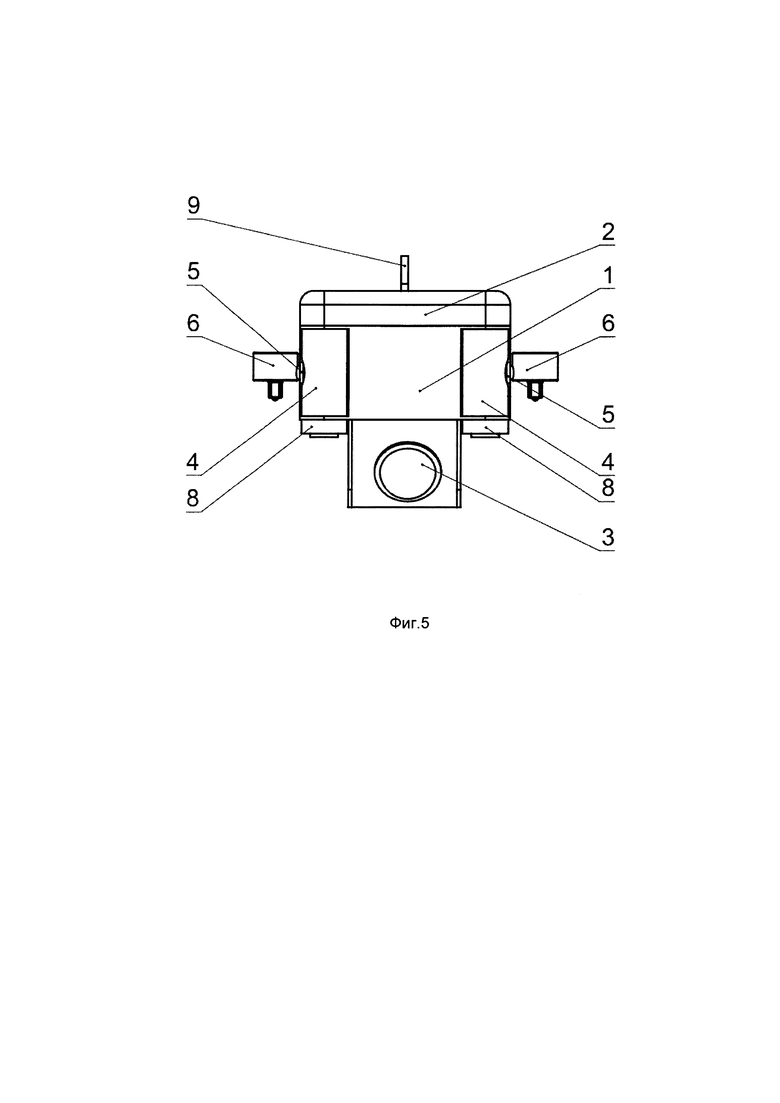
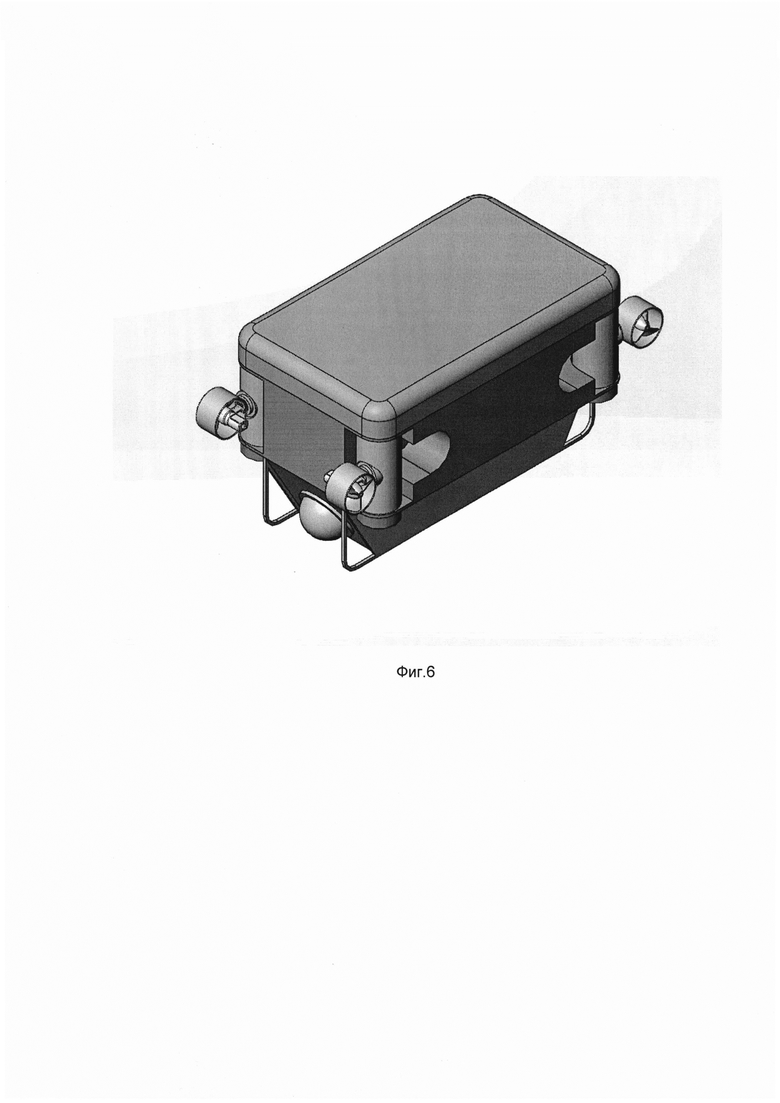
Заявляемое техническое решение поясняется чертежами, где на фиг. 1 представлен фронтальный вид подводного аппарата в собранном исходном состоянии движителей, т.е. при спуске, подъеме и доковании, на фиг. 2 - вид сбоку на подводный аппарат в собранном состоянии движителей, на фиг. 3 - фронтальный вид подводного аппарата при движении «вперед-назад», на фиг. 4 - фронтальный вид подводного аппарата при движении «лагом», на фиг. 5 - фронтальный вид подводного аппарата при движении «вверх-вниз»; на фиг. 6 - общий вид подводного аппарата.
Подводный аппарат состоит из корпуса 1 в форме прямоугольного параллелепипеда, блока плавучести 2, технологического оборудования 3. Во внутренних углах корпуса 1 подводного аппарата установлены вертикальные поворотные колонны 4, которые снабжены поворотными горизонтальными приводами 5, к которым присоединены движители 6. В корпусе 1 подводного аппарата выполнены ниши 7, форма которых соответствует контурам движителей 6. Вертикальные поворотные колонны 4 приводятся в движение поворотными приводами 8, обеспечивающими их поворот, по крайней мере, на 180° Горизонтальные поворотные приводы 5 обеспечивают поворот движителей 6, по крайней мере, на угол ±90° от исходного положения, соответствующего парковке движителей 6 в нишах 7 внутри корпуса 1 подводного аппарата. Захват 9 предназначен для заведения подводного аппарата в док снизу вверх, когда движители 6 подводного аппарата находятся в исходном состоянии.
Подводный аппарат работает следующим образом. При спуске, подъеме и доковании подводного аппарата вертикальные поворотные колонны 4 и горизонтальные приводы 5 находятся в исходном положении, как показано на фиг. 1 При этом движители 6 заведены в ниши 7 корпуса 1 так, чтобы они не выступали за контуры корпуса 1 подводного аппарата. Для движения «вперед-назад» вертикальные поворотные колонны 4 поворачиваются на угол 180°, при этом движители 6 выводятся из ниш 7 и выступают полностью за контуры корпуса 1 подводного аппарата, как показано на фиг. 3. Этим обеспечивается свободный приток забортной воды к движителям 6. Переключение направления движения осуществляется реверсированием движителей 6. Для движения «лагом» вертикальные поворотные колонны 4 поворачиваются на угол 90° от исходного положения, как показано на фиг. 4. Для движения «вверх-вниз» вертикальные поворотные колонны 4 устанавливаются в положение как для движения «вперед-назад», а горизонтальные приводы 5 поворачиваются на угол ±90° от исходного положения, как показано на фиг. 5. Возможны также и промежуточные положения вертикальных поворотных колонн 4, горизонтальных приводов 5 и различные способы включения движителей 6 для создания крена, дифферента и вращения подводного аппарата на месте. Таким образом, максимальное количество движителей 6, обеспечивающих все маневры подводного аппарата, равно четырем, что упрощает в целом конструкцию подводного аппарата. Перед подъемом в док горизонтальные приводы 5 возвращаются в исходное положение и движители 6 убираются в ниши 7 корпуса 1 подводного аппарата.
Предлагаемое размещение движителей 6 на поворотных колоннах 4 и применение горизонтальных приводов 5 повышает маневренность подводного аппарата, предотвращает подсос забортной воды внутрь каркаса корпуса 1 подводного аппарата, обеспечивает лучшие гидродинамические условия для их работы и в то же время исключает их повреждение при спуске, подъеме и доковании. Также появляется возможность более плотной компоновки технологического оборудования внутри каркаса корпуса 1 подводного аппарата и использования корпусов 1 закрытого типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529589C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2524514C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ (ВАРИАНТЫ) | 2015 |
|
RU2585380C1 |
Изобретение относится к подводным необитаемым телеуправляемым аппаратам, предназначенным для осмотровых и технологических операций, осуществляемых в толще воды. Подводный аппарат содержит корпус в форме прямоугольного параллелепипеда, блок плавучести, технологическое оборудование и движители, установленные на вертикальных поворотных колоннах, вертикальные поворотные колонны размещены во внутренних углах корпуса подводного аппарата и снабжены поворотными горизонтальными приводами, к которым присоединены движители, при этом корпус подводного аппарата имеет внутри ниши, соответствующие контурам движителей при их парковке, кроме того, вертикальные поворотные колонны снабжены приводами с возможностью поворота их на угол по крайней мере 180°, а горизонтальные приводы, к которым присоединены движители, имеют возможность поворота по крайней мере на угол ±90° от исходного положения, соответствующего парковке движителей в нишах внутри корпуса подводного аппарата. Технический результат, получаемый при реализации заявляемого изобретения, заключается в упрощении конструкции за счет сокращения количества движителей при одновременном повышении маневренности подводного аппарата с сохранением возможного безопасного спуска, подъема и докования, т.е. расположения подводного аппарата в док-станции. 1 з.п. ф-лы, 6 ил.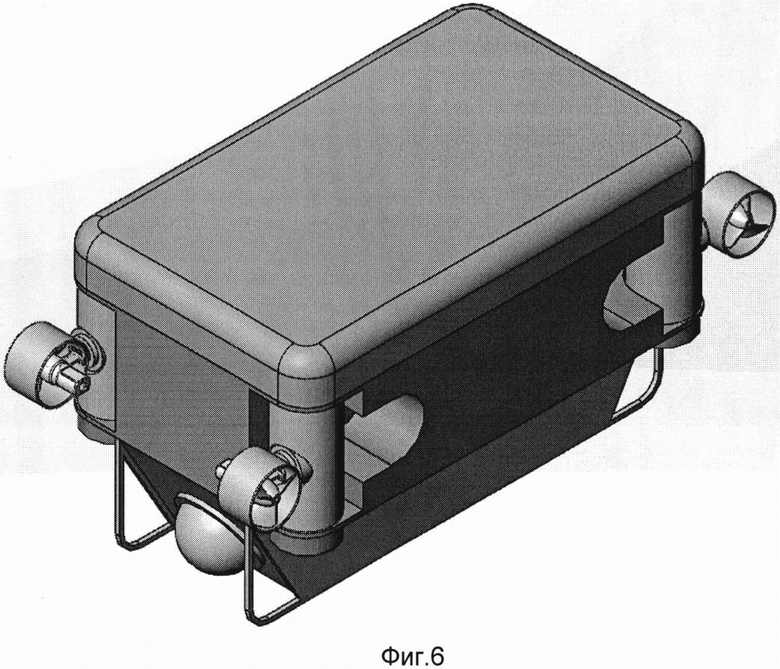
1. Подводный аппарат, содержащий корпус в форме прямоугольного параллелепипеда, блок плавучести, технологическое оборудование и движители, установленные на вертикальных поворотных колоннах, отличающийся тем, что вертикальные поворотные колонны размещены во внутренних углах корпуса подводного аппарата и снабжены поворотными горизонтальными приводами, к которым присоединены движители, при этом корпус подводного аппарата имеет внутри ниши, соответствующие контурам движителей при их парковке.
2. Подводный аппарат по п. 1, отличающийся тем, что, вертикальные поворотные колонны снабжены приводами с возможностью поворота их на угол по крайней мере 180°, а горизонтальные приводы, к которым присоединены движители, имеют возможность поворота по крайней мере на угол ±90° от исходного положения, соответствующего парковке движителей в нишах внутри корпуса подводного аппарата.
| Способ определения температурных влияний на рельсовый путь со сваренными стыками | 1932 |
|
SU33550A1 |
| ПОДВОДНЫЙ АППАРАТ В.С.ГРИГОРЧУКА | 1998 |
|
RU2131376C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2104210C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2434780C2 |
| JP 7223589 A, 22.08.1995. | |||

