ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе управления зарядной емкостью для батареи, которая установлена на транспортном средстве с электрическим двигателем в качестве источника приведения в движение.
УРОВЕНЬ ТЕХНИКИ
Батарея устанавливается в транспортном средстве, таком как EV (Электрическое Транспортное Средство) или HEV (Гибридное Электрическое Транспортное Средство) для подачи электрической мощности к электрическому двигателю. В батарее обеспечено множество последовательно соединенных аккумуляторных ячеек. В качестве аккумуляторных ячеек используются аккумуляторные батареи, такие как никель-металлгидридные батареи или ионно-литиевые батареи. Тем не менее, для того чтобы безопасно использовать аккумуляторные батареи, требуется постоянно отслеживать состояние заряда (SOC) батареи таким образом, чтобы обеспечить управлением им с целью предотвращения перезарядки или чрезмерной разрядки. Следует отметить, что SOC батареи вычисляется на основе аккумулированных значений токов заряда и разряда и/или напряжения на зажимах батареи. В вычисляемое на основе данного способа SOC (контрольное SOC) включена ошибка, и присутствует отклонение контрольного SOC от SOC в действительности (фактическое SOC).
В системе отслеживания для отслеживания SOC батареи, установленной на транспортном средстве, таком как HEV, диапазон контрольного SOC, в котором может использоваться батарея (от нижней границы SOC до верхней границы SOC), разделен на множество областей (именуемых здесь и далее как «зоны») для отслеживания батареи. Фиг.8 является схемой, изображающей пример зависимости между диапазоном контрольного SOC, в котором может использоваться батарея, и множеством его зон. Как показано на фиг.8, диапазон контрольного SOC, в котором может использоваться батарея, разделен на четыре зоны, включающие в себя Зону C, Зону B, Зону A и Зону D, начиная со стороны нижней границы SOC до стороны верхней границы SOC. Зона A разделена на три класса, включающие в себя Класс L, Класс M и Класс H, начиная со стороны нижней границы до стороны верхней границы. Зона D разделена на два класса, включающие в себя Класс L и Класс H, начиная со стороны нижней границы SOC до стороны верхней границы SOC. Модуль управления для батареи исполняет нижеследующее управление в зависимости от зоны или класса, к которому относится контрольное SOC батареи.
Батарея в Зоне C находится в таком заряженном состоянии, при котором посредством электрического двигателя может быть запущен двигатель внутреннего сгорания (состояние разрешения пуска двигателя). Следовательно, модуль управления запрещает разрядку батареи в Зоне C, но разрешает разрядку для пуска двигателя внутреннего сгорания посредством электрического двигателя. Дополнительно модуль управления запрещает приведение в движение EV, при котором приведение в движение транспортного средства осуществляется только посредством движущей силы электрического двигателя и с помощью приведения в движение транспортного средства посредством движущей силы электрического двигателя. Следует отметить, что модуль управления полностью запрещает разряд батареи, чье контрольное SOC ниже нижней границы Зоны C (нижней границы SOC) и выполняет принудительную зарядку.
Батарея в Зоне B находится в таком заряженном состоянии, которое гарантирует подачу электрической мощности на электрический двигатель при движении в гору или при пуске (состояние обеспечения движения в гору/пуска). Следовательно, модуль управления запрещает разряд батареи в Зоне B. Дополнительно модуль управления запрещает приведение в движение EV и ограничивает помощь посредством электрического двигателя.
Батарея в Классе L в Зоне A (здесь и далее именуемая как «Зона AL») находится в таком заряженном состоянии (достаточно заряженном состоянии), которое разрешает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания и которое ограничивает приведение в движение EV (приведение в движение на основе только движущей силы электрического двигателя). Следовательно, модуль управления исполняет стандартное управление батареей на стороне зарядки в Зоне AL. Дополнительно модуль управления ограничивает приведение в движение EV и разрешает помощь посредством электрического двигателя.
Дополнительно батарея в Классе M в Зоне A (здесь и далее именуемая как «Зона AM») находится в таком заряженном состоянии, которое разрешает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания и которое разрешает приведение в движение EV (состояние разрешения приведения в движение по дороге общего назначения равнинной или городской области). Следовательно, модуль управления исполняет стандартное управление над батареей в Зоне AM. В дополнение модуль управления разрешает не только приведение в движение EV, но и помощь посредством электрического двигателя.
В дополнение батарея в Классе H в Зоне A (здесь и далее именуемая как «Зона AH») находится в таком заряженном состоянии, которое ограничивает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания и которое разрешает приведение в движение EV (состояние достаточной рекуперации с ограниченной зарядкой). Следовательно, модуль управления исполняет стандартное управление на стороне разрядки над батареей в Зоне AH. Дополнительно модуль управления разрешает приведение в движение EV с тем, чтобы усилить помощь посредством электрического двигателя.
Батарея в Классе L в Зоне D (здесь и далее именуемая как «Зона DL») находится в таком заряженном состоянии, которое ограничивает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания (состояние увеличения стороны разрядки с ограниченной зарядкой). Следовательно, модуль управления ограничивает зарядку батареи в Зоне DL. Дополнительно модуль управления усиливает приведение в движение EV и помощь посредством электрического двигателя.
В дополнение батарея в Классе H в Зоне D (здесь и далее именуемая как «Зона DH») находится в таком заряженном состоянии, которое запрещает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания и ограничивает рекуперативную работу электрического двигателя во время замедления (состояние предотвращения перезарядки и отсутствия замедления). Следовательно, модуль управления запрещает зарядку батареи в Зоне DH и ограничивает рекуперацию. Следует отметить, что модули управления запрещают зарядку и рекуперативную работу батареи, чье контрольное SOC выше верхней границы Зоны DH (верхней границы SOC), и принудительно разряжают батарею.
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный Документ 1: Японский Патент № 3705008.
Патентный Документ 2: Японский Патент № 3754254.
Патентный Документ 3: Японский Патент № 3915258.
Патентный Документ 4: JP-A-2010-035350.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Батарея постепенно изнашивается в соответствии с условиями, частотой и продолжительностью использования батареи. Следовательно, в связи с износом батареи уменьшается доступная емкость батареи. А именно, доступная емкость батареи постепенно уменьшается с исходного уровня, при котором началось использование батареи, до итогового уровня, при котором срок службы батареи близок к концу. С другой стороны, диапазон (от нижней границы SOC до верхней границы SOC) контрольного SOC батареи, который был описан ранее, не меняется по значению даже при изменении доступной емкости. Таким образом, несмотря на то что диапазон контрольного SOC батареи не меняется от исходного уровня до итогового уровня, доступная емкость снижается. Фиг.9 является схемой, изображающей пример зависимости между изменением доступной емкости батареи и множеством зон контрольного SOC, которые меняются в соответствии с изменением состояния батареи от исходного уровня до итогового уровня.
Как изображено на фиг.9, диапазон емкости, который распределен на каждую из зон, уменьшается с постоянным коэффициентом по мере уменьшения доступной емкости в связи с износом батареи. Следует отметить, что, несмотря на то что это не изображено, диапазон емкости, который распределяется на каждый из классов Зоны A, также уменьшается с постоянным коэффициентом. Тем не менее, при уменьшении диапазона емкости, который распределен на Зону C, которая установлена для состояния разрешения пуска двигателя, существует возможность того, что батарея не сможет подать необходимую электрическую мощность для пуска двигателя внутреннего сгорания на электрический двигатель. Дополнительно при уменьшении диапазона емкости, который распределяется на Зону B, которая установлена для состояния движения в гору/обеспечения пуска, существует возможность того, что эффективность движения в гору или пусковая эффективность транспортного средства уменьшатся. Кроме того, при уменьшении диапазона емкости, который распределен Зоне AM, в которой батарея заряжается или разряжается с наилучшей экономией топлива, существует возможность ухудшения экономии топлива в сравнении с тем, которое достигается при исходном уровне батареи.
Задачей изобретения является предоставление системы управления зарядной емкостью, которая позволяет полностью демонстрировать эффективность батареи в достаточной мере, сдерживая при этом влияние износа батареи на наименьшем уровне.
С целью решения вышеуказанной задачи в соответствии с изобретением по пункту 1 формулы изобретения предоставляется система управления зарядной емкостью (например, система 113 управления зарядной емкостью в варианте осуществления) для батареи (например, батареи 103 в варианте осуществления), предоставленной на транспортном средстве с электрическим двигателем (например, электрическим двигателем M в варианте осуществления) в качестве источника приведения в движение, отличающаяся тем, что включает в себя: модуль оценки изношенного состояния (например, модуль 153 вычисления внутреннего сопротивления), который оценивает изношенное состояние батареи; модуль установки зон (например, модуль 155 установки зон в варианте осуществления), который устанавливает зарядную емкость, в которой может использоваться батарея, для множества зон в соответствии с изношенным состоянием батареи; модуль вычисления заряженного состояния (например, модуль 157 вычисления контрольного SOC в варианте осуществления), который вычисляет заряженное состояние батареи; модуль определения зоны (например, модуль 159 определения зоны батареи в варианте осуществления), который определяет, к какой зоне из множества зон, установленных модулем установки зон, относится заряженное состояние батареи; и модуль предписания управления (например, модуль 161 предписания управления в варианте осуществления), который предписывает выполнение управления в связи с зарядкой или разрядкой батареи в соответствии с зоной, которая определена модулем определения зоны, и отличается тем, что диапазон зарядной емкости, по меньшей мере, одной предварительно определенной зоны из множества зон, установленных модулем установки зон, остается постоянным независимо от изношенного состояния батареи, тогда как диапазоны зарядных емкостей зон, отличных от предварительно определенной зоны, меняются в соответствии с изношенным состоянием батареи.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 2 формулы, отличается тем, что модуль предписания управления, предписывает исполнение различного управления, в связи с зарядкой или разрядкой батареи в зависимости от того, к какой зоне из множества зон относится заряженное состояние батареи.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 3 формулы, отличается тем, что диапазоны зарядных емкостей зон, отличных от предварительно определенной зоны, становятся уже с ухудшением изношенного состояния батареи.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 4 формулы, отличается тем, что модуль предписания управления ограничивает или запрещает разрядку батареи в предварительно определенной зоне.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 5 формулы, отличается тем, что транспортное средство имеет двигатель внутреннего сгорания в качестве источника приведения в движение в дополнение к электрическому двигателю, и тем, что модуль предписания управления запрещает разрядку батареи, но разрешает разрядку батареи для пуска двигателя внутреннего сгорания посредством электрического двигателя в предварительно определенной зоне.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 6 формулы, отличается тем, что предварительно определенной зоной является зона, в которой батарея заряжается и разряжается с наилучшей экономией топлива из множества зон.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 7 формулы, отличается тем, что транспортное средство имеет двигатель внутреннего сгорания, который может приводить в движение электрический двигатель, с тем, чтобы заряжать батарею, и тем, что модуль предписания управления запрещает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания и ограничивает рекуперативную работу электрического двигателя при замедлении транспортного средства.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 8 формулы, отличается тем, что при ограничении рекуперативной работы электрического двигателя модуль предписания управления меняет отношение силы рекуперативного торможения к общей силе торможения во время замедления транспортного средства в соответствии с заряженным состоянием батареи.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 9 формулы, отличается тем, что модуль предписания управления ограничивает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания в зонах, отличных от предварительно определенной зоны.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 10 формулы, отличается тем, что транспортное средство имеет двигатель внутреннего сгорания (например, двигатель E внутреннего сгорания) в качестве источника приведения в движение в дополнение к электрическому двигателю, и тем, что модуль предписания управления разрешает зарядку батареи и ограничивает приведение в движение транспортного средства только на основании движущей силы электрического двигателя в зонах, отличных от предварительно определенной зоны.
Кроме того, система управления зарядной емкостью в соответствии с изобретением, изложенным в пункте 11 формулы изобретения, отличается тем, что зонами, отличными от предварительно определенной зоны, являются зоны, в которых батарея заряжается или разряжается с наилучшей экономией топлива из множества зон, и степень сужения диапазона зарядной емкости становится в них наименьшей.
В соответствии с системой управления зарядной емкостью, изложенной в пунктах 1-11 формулы, эффективность батареи может демонстрироваться в достаточной мере, при этом влияние износа сдерживается на минимальном уровне.
В соответствии с системой управления зарядной емкостью, изложенной в пункте 4 формулы, эффективность движения в гору и пусковая эффективность могут демонстрироваться в достаточной мере.
В соответствии с системой управления зарядной емкостью, изложенной в пункте 5 формулы, пусковая эффективность электрического двигателя двигателем внутреннего сгорания может демонстрироваться в достаточной мере.
В соответствии с системой управления зарядной емкостью, изложенной в пункте 6 формулы, эффективность батареи может демонстрироваться в достаточной мере без ухудшения экономии топлива.
В соответствии с системой управления зарядной емкостью, изложенной в пункте 8 формулы, может быть предотвращено резкое изменение силы торможения.
В соответствии с системой управления зарядной емкостью, изложенной в пункте 11 формулы, эффективность батареи может демонстрироваться в достаточной мере без ухудшения экономии топлива.
Краткое описание чертежей
Фиг.1 является принципиальной структурной схемой HEV, на котором установлена система управления зарядной емкостью варианта осуществления изобретения.
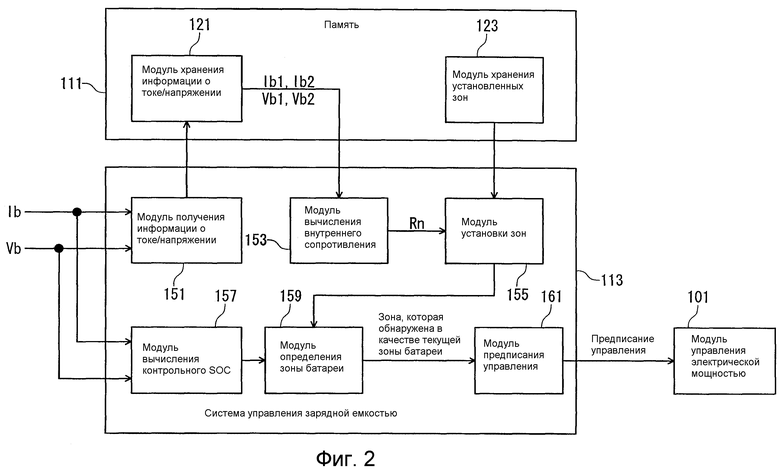
Фиг.2 является структурной схемой, изображающей внутренние конфигурации памяти 111 и системы 113 управления зарядной емкостью.
Фиг.3 является схемой, изображающей пример карты установки зон, которая установлена для внесения изменений в соответствии с изменениями контрольного SOC и внутреннего сопротивления, которые меняются в соответствии с изменением в доступной емкости батареи 103.
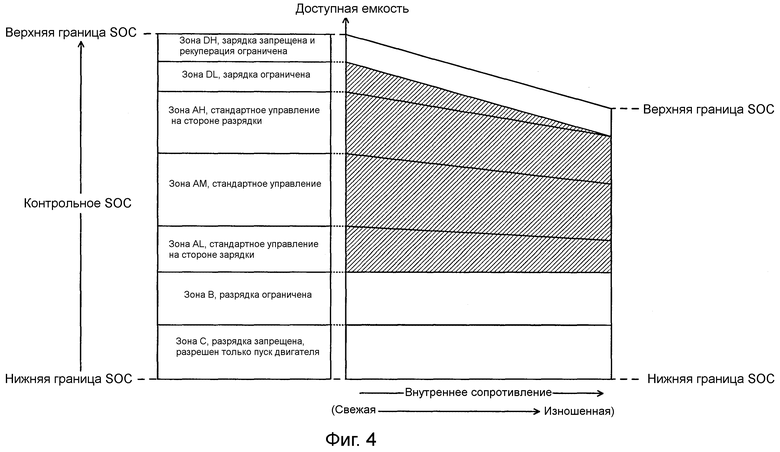
Фиг.4 является схемой, изображающей другой пример карты установки зон, которая установлена для внесения изменений в соответствии с изменениями контрольного SOC и внутреннего сопротивления, которые меняются в соответствии с изменением в доступной емкости батареи 103.
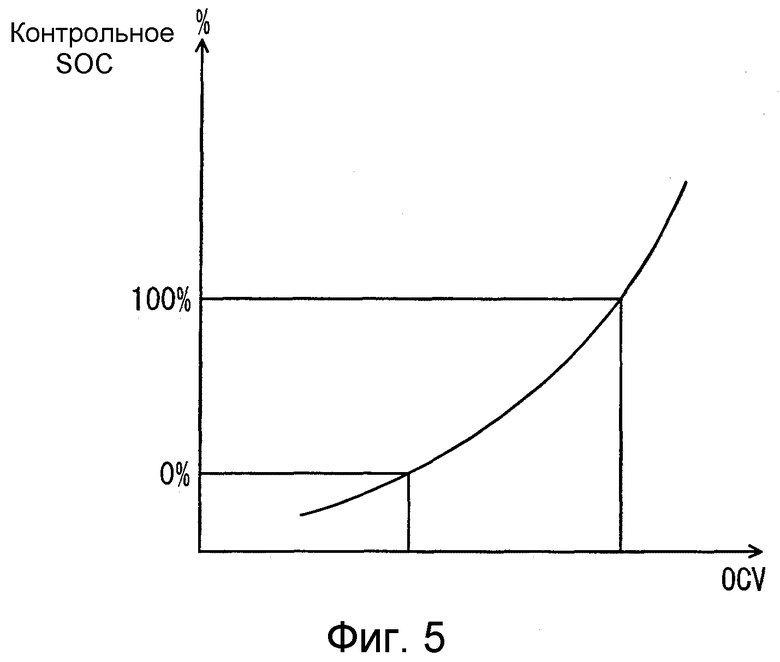
Фиг.5 является графиком, изображающим зависимость между напряжением разомкнутой цепи OCV и контрольным SOC батареи 103.
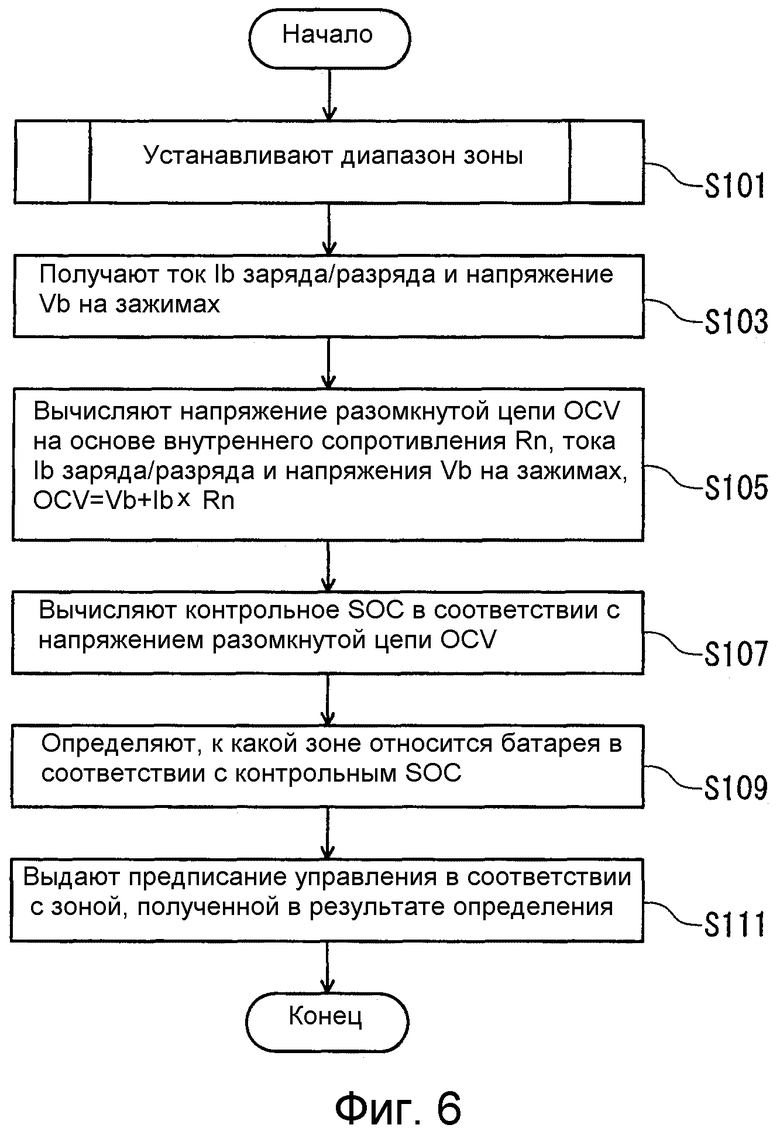
Фиг.6 является блок-схемой, изображающей функционирование системы 113 управления зарядной емкостью.
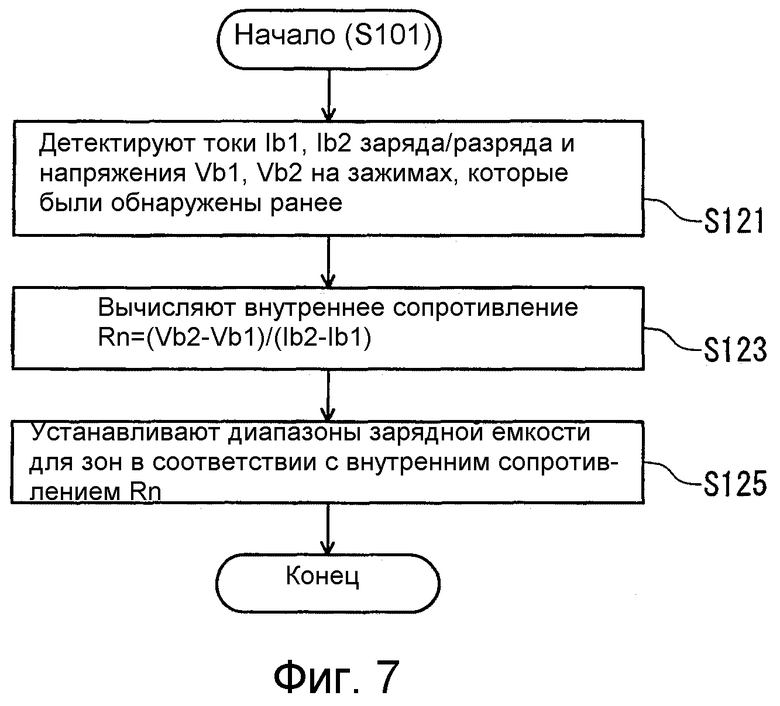
Фиг.7 является блок-схемой, подробно изображающей этап S101, который показан на фиг.6.
Фиг.8 является схемой, изображающей пример зависимости между диапазоном контрольного SOC, в котором может использоваться батарея, и множеством его зон.
Фиг.9 является схемой, изображающей пример зависимости между изменением доступной емкости батареи и множеством зон контрольного SOC, которая меняется в соответствии с изменением состояния батареи от ее исходного уровня до итогового уровня.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Здесь и далее со ссылкой на чертежи будет описан вариант осуществления изобретения. Система управления зарядной емкостью данного варианта осуществления, который будет описан ниже, установлена на транспортном средстве, таком как EV (Электрическое Транспортное Средство) или HEV (Гибридное Электрическое Транспортное Средство), в котором в качестве источника приведения в движение предоставлен электрический двигатель, который приводится в движение электрической мощностью, подаваемой от батареи.
Фиг.1 является принципиальной структурной схемой HEV, на котором установлена система управления зарядной емкостью данного варианта осуществления. HEV (здесь и далее именуемое просто как «транспортное средство»), показанное на фиг.1, главным образом включает в себя двигатель E внутреннего сгорания, электрический двигатель M, трансмиссию TM, ведомые колеса W, модуль 101 управления электрической мощностью, батарею 103, датчик 105 тока, датчик 107 напряжения, память 111 и систему 113 управления зарядной емкостью. На данном транспортном средстве движущая сила, по меньшей мере, от одного из двигателя E внутреннего сгорания и электрического двигателя M передается к ведомым колесам W через трансмиссию TM. Дополнительно при передаче движущей силы со стороны ведомых колес W на сторону электрического двигателя M во время замедления электрический двигатель M функционирует в качестве генератора, чтобы генерировать так называемую силу торможения рекуперацией, тем самым кинетическая энергия кузова транспортного средства возвращается в батарею 103 в качестве рекуперированной энергии. Кроме того, электрический двигатель M приводится в движение как генератор отдачи двигателя E внутреннего сгорания в соответствии с состоянием приведения в движение транспортного средства, и тем самым создается генерируемая энергия.
Модуль 101 управления электрической мощностью управляет подачей электрической мощности от батареи 103 на электрический двигатель M, которая связана с приведением в движение электрического двигателя M и возвратом рекуперированной энергии от электрического двигателя M на батарею 103.
Батарея 103 является, например, NiMH (никель-металлогидридной) батареей, в которой в качестве активного материала катода используется гидрид металла, или литий-ионной батареей, электрической двухслойной емкостью или конденсатором. Батарея 103 неоднократно заряжается и разряжается в рамках диапазона (от нижней границы SOC до верхней границы SOC) контрольного SOC, в котором может использоваться батарея.
Датчик 105 тока детектирует ток Ib заряда/разряда батареи 103. Ток Ib заряда/разряда включает в себя ток разряда, который подается от батареи 103 на электрический двигатель M, и ток заряда, который подается на батарею 103 электрическим двигателем M, который выполняет рекуперативную работу. Датчик 107 напряжения детектирует напряжение Vb на зажимах (также именуемое как CCV (Напряжение Замкнутой Цепи)) батареи 103. Моменты детектирования датчиком 105 тока и моменты выполнения детектирования датчиком 107 напряжения, по сути, совпадают.
Память 111 хранит информацию о токе Ib заряда/разряда, который детектирован датчиком 105 тока, и информацию о напряжении Vb на зажимах, которое детектировано датчиком 107 напряжения. Дополнительно память 111 хранит карту установки зон, которая соответствует внутреннему сопротивлению батареи 103. Карта установки зон будет описана позже.
Система 113 управления зарядной емкостью получает информацию о токе Ib заряда/разряда, который детектируется датчиком 105 тока, и информацию о напряжении Vb на зажимах, которое детектируется датчиком 107 напряжения, и сохраняет ее в памяти 111. Дополнительно система 113 управления зарядной емкостью устанавливает диапазон зарядной емкости для каждой из множества зон (Зоны C, Зоны B, Зоны A, Зоны D), которые составляют диапазон (от нижней границы SOC до верхней границы SOC) контрольного SOC, в котором может использоваться батарея, и каждого класса (Класса L, Класса M, Класса H) Зоны A. В дополнение система 113 управления зарядной емкостью вычисляет контрольное SOC батареи 103 на основе напряжения незамкнутой цепи (OCV) батареи 103. Система 113 управления зарядной емкостью определяет, к какой зоне или классу относится батарея 103 на основе вычисленного таким образом контрольного SOC. Кроме того, система 113 управления зарядной емкостью управляет модулем 101 управления электрической мощностью в соответствии с определенной зоной или классом.
Фиг.2 является структурной схемой, изображающей внутренние конфигурации памяти 111 и системы 113 управления зарядной емкостью. Как изображено на фиг.2, память 111 имеет модуль 121 хранения информации о токе/напряжении и модуль 123 хранения установленных зон. Модуль 121 хранения информации о токе/напряжении хранит ток Ib заряда/разряда и напряжение Vb на зажимах. Дополнительно модуль 123 хранения установленных зон хранит карту установки зон, изображенную на фиг.3, или карту установки зон, изображенную на фиг.4, в которой установлен диапазон зарядной емкости для каждой зоны, который соответствует внутреннему сопротивлению батареи 103.
Фиг.3 является схемой, изображающей пример карты установки зон, которая установлена для внесения изменений в соответствии с изменениями контрольного SOC и внутреннего сопротивления, которые меняются в соответствии с изменением в доступной емкости батареи 103. Как изображено на фиг.3, в карте установке зон с увеличением внутреннего сопротивления батареи 103, как изображено наклонными линиями, диапазоны зарядных емкостей Зоны AL (Класс L в Зоне A), Зоны AH (Класс H в Зоне A) и Зоны DL (Класс L в Зоне D) сужаются. С другой стороны, диапазоны зарядных емкостей Зоны C, Зоны B, Зоны AM (Класс M в Зоне A) и Зоны DH (Класс H в Зоне D) не изменяются, чтобы оставаться постоянными даже при изменении внутреннего сопротивления батареи.
Фиг.4 является схемой, изображающей другой пример карты установки зон, которая установлена для внесения изменений в соответствии с изменениями контрольного SOC и внутреннего сопротивления, которые меняются в соответствии с изменением в доступной емкости батареи 103. Как изображено на фиг.4, в карте установки зон с увеличением внутреннего сопротивления батареи 103, как изображено наклонными линиями, диапазоны зарядных емкостей Зоны AL, Зоны AM, Зоны AH и Зоны DL сужаются. С другой стороны, диапазоны зарядных емкостей Зоны C, Зоны B и Зоны DH не изменяются, чтобы оставаться постоянными даже при изменении внутреннего сопротивления батареи. Следует отметить, что степень сужения диапазона Зоны AM является наименьшей из степеней сужения диапазонов Зоны AL, Зоны AM, Зоны AH и Зоны DL.
Как изображено на фиг.2, система 113 управления зарядной емкостью имеет модуль 151 получения информации о токе/напряжении, модуль 153 вычисления внутреннего сопротивления, модуль 155 установки зон, модуль 157 вычисления контрольного SOC, модуль 159 определения зоны батареи и модуль 161 предписания управления.
Модуль 151 получения информации о токе/напряжении получает информацию о токе Ib заряда/разряда, который детектируется датчиком 105 тока, и информацию о напряжении Vb на зажимах, которое детектировано датчиком 107 напряжения, и сохраняет ее в модуле 121 хранения информации о токе/напряжении памяти 111.
Модуль 153 вычисления внутреннего сопротивления считывает токи Ib1, Ib2 заряда/разряда и напряжения Vb1, Vb2 на зажимах, которые были детектированы ранее, из модуля 121 хранения информации о токе/напряжении и вычисляет внутреннее сопротивление Rn батареи 103 посредством следующего уравнения (1).
Rn=(Vb2-Vb1)/(Ib2-Ib1)
Модуль 155 установки зон устанавливает диапазоны для зарядных емкостей соответствующих зон 123, которые соответствуют вычисленному внутреннему сопротивлению Rn.
Модуль 157 вычисления контрольного SOC вычисляет напряжение разомкнутой цепи (OCV) батареи 103 посредством нижеследующего выражения (2) на основе внутреннего сопротивления Rn, вычисленного модулем 155 установки зон, тока Ib заряда/разряда, детектированного датчиком 105 тока, и напряжения Vb на зажимах, детектированного датчиком 107 напряжения.
OCV=Vb+Ib×Rn
Модуль 159 определения зоны батареи вычисляет контрольное SOC батареи 103, которое соответствует напряжению разомкнутой цепи OCV, обращаясь к графику, изображенному на фиг.5. Фиг.5 является графиком, изображающим зависимость между напряжением разомкнутой цепи OCV и контрольным SOC. Кроме того, модуль 159 определения зоны батареи определяет, к какой зоне относится батарея 103 на основе зон, установленных модулем 155 установки зон, и вычисленного контрольного SOC.
Модуль 161 предписания управления выдает модулю 101 управления электрической мощностью предписание по управлению на основе скорости транспортного средства, положения педали акселератора, усилия на педаль тормоза, контрольного SOC и переключает позицию в соответствии с зоной, которая определена модулем 159 определения зоны батареи. А именно, как описано в разделе «Уровень техники», модуль 161 предписания управления запрещает разрядку батареи 103, которая находится в Зоне C, но разрешает разрядку батареи 103 для пуска двигателя E внутреннего сгорания посредством электрического двигателя M. Дополнительно модуль 161 предписания управления ограничивает разрядку батареи 103, которая находится в Зоне B.
Дополнительно модуль 161 предписания управления разрешает зарядку батареи 103 посредством приведения в движение электрического двигателя M двигателем E внутреннего сгорания, когда батарея 103 находится в Зоне AL, и ограничивает приведение в движение EV (приведение в движение на основе движущей силы только от электрического двигателя M). В дополнение модуль 161 предписания управления ограничивает зарядку батареи 103 посредством приведения в движение электрического двигателя M двигателем E внутреннего сгорания, когда батарея 103 находится в Зоне AM, и разрешает приведение в движение EV. В дополнение модуль 161 предписания управления ограничивает зарядку батареи 103 посредством приведения в движение электрического двигателя двигателем E внутреннего сгорания, когда батарея 103 находится в зоне AH и разрешает приведение в движение EV.
Дополнительно модуль 161 предписания управления ограничивает зарядку батареи 103 посредством приведения в движение электрического двигателя M двигателем E внутреннего сгорания, когда батарея 103 находится в Зоне DL. Кроме того, модуль 161 предписания управления запрещает зарядку батареи 103 посредством приведения в движение электрического двигателя M двигателем E внутреннего сгорания, когда батарея 103 находится в Зоне DH, и ограничивает рекуперативную работу электрического двигателя M при замедлении. Ограничение рекуперативной работы означает постепенное изменение отношения величины рекуперативного торможения посредством рекуперативной работы электрического двигателя во время замедления к величине нормального торможения с тем, чтобы избежать резкого изменения величины торможения, которая соответствует конкретному усилию на педаль тормоза. А именно, при запрете рекуперативной работы в Зоне DH сила торможения резко изменяется, поскольку величина рекуперативного торможения становится нулевой в тот же момент, как контрольное SOC батареи смещается из Зоны DL в Зону DH. Тем не менее, как в данном варианте осуществления, посредством постепенного изменения величины рекуперативного торможения в соответствии с контрольным SOC батареи 103 в Зоне DH может быть предотвращено резкое изменение силы торможения.
Фиг.6 является блок-схемой, изображающей функционирование системы 113 управления зарядной емкостью. Как изображено на фиг.6, модуль 155 установки зон устанавливает диапазоны зарядных емкостей зон, обращаясь к карте установке зон (этап S101). На этапе S101, как изображено на фиг.7, модуль 153 вычисления внутреннего сопротивления считывает токи Ib1, Ib2 заряда/разряда и напряжения Vb1, Vb2 на зажимах батареи 103, которые были детектированы ранее, из модуля 121 хранения информации о токе/напряжении (этап S121). Далее модуль 153 вычисления внутреннего сопротивления вычисляет внутреннее сопротивление Rn батареи 103 (этап S123). Далее модуль 155 установки зон устанавливает диапазоны зарядных емкостей зон в соответствии с вычисленным внутренним сопротивлением Rn (этап S125).
Далее модуль 151 получения информации о токе/напряжении получает информацию о токе Ib заряда/разряда, детектированном датчиком 105 тока, и информацию о напряжении Vb на зажимах, детектированном датчиком 107 напряжения (этап S103). Далее модуль 157 вычисления контрольного SOC вычисляет напряжение разомкнутой цепи OCV батареи 103 на основе внутреннего сопротивления Rn, вычисленного на этапе 123, тока Ib заряда/разряда и напряжения Vb на зажимах (этап S105).
Далее модуль 159 определения зоны батареи вычисляет контрольное SOC батареи 103, которое соответствует напряжению разомкнутой цепи OCV (этап S107). Кроме того, модуль 159 определения зоны батареи определяет, к какой зоне относится батарея 103 на основе зон, установленных на этапе S101, и контрольного SOC, вычисленного на этапе S107 (этап S109). Далее модуль 161 предписания управления выдает модулю 101 управления электрической мощностью предписание по управлению, которое соответствует зоне, которая определена на этапе S109 (этап S111).
Таким образом, как было описано ранее, диапазон зарядной емкости Зоны C, которая установлена для диапазона контрольного SOC, в котором может использоваться батарея 103, затрагивает электрическую мощность, которая подается на электрический двигатель M, который пускает двигатель E внутреннего сгорания. Дополнительно диапазон зарядной емкости Зоны B затрагивает эффективность движения в гору и пусковую эффективность транспортного средства. В дополнение диапазон зарядной емкости Зоны AM (Класс M в Зоне A) затрагивает экономию топлива, связанную с зарядкой/разрядкой батареи 103. Кроме того, диапазон зарядной емкости Зоны DH затрагивает эффективность управления батареи 103, чтобы предотвратить переход батареи 103 в состояние перезарядки. В данном варианте осуществления даже несмотря на то, что батарея 103 изнашивается, диапазоны зарядных емкостей Зоны C, Зоны B, Зоны AM и Зоны DH остаются неизменными в случае следования карте установки зон, изображенной на фиг.3. В дополнение диапазоны зарядных емкостей Зоны C, Зоны B и Зоны DH остаются неизменными в случае следования карте установки зон, изображенной на фиг.4. Следовательно, может в достаточной мере демонстрироваться эффективность батареи 103 посредством сдерживания влияния изношенной батареи 103 на минимальном уровне.
Вариант осуществления был описан, как если бы транспортным средством являлось HEV, которое приводится в движение только движущей силой, по меньшей мере, одного из двигателя E внутреннего сгорания и электрического двигателя M. Тем не менее, изобретение также может применяться к EV, которое приводится в движение только движущей силой электрического двигателя. Соответственно, изобретение также может применяться к последовательному HEV, который приводится в движение движущей силой электрического двигателя, который приводится в движение посредством использования в качестве источника приведения в движение электрической мощности, формируемой на основе мощности двигателя внутреннего сгорания.
Несмотря на то что изобретение было описано подробно, и опираясь на конкретный вариант осуществления, специалистам в соответствующей области, к которой относится изобретение, очевидно, что в отношении варианта осуществления могут быть выполнены изменения или модификации, не отступая от сущности и объема изобретения.
Данная патентная заявка основана на японской патентной заявке (№ 2010-158743), поданной 13 июля 2010 г., содержимое которой включено в настоящее описание посредством ссылки.
ОПИСАНИЕ ЦИФРОВЫХ И БУКВЕННЫХ ОБОЗНАЧЕНИЙ
E Двигатель внутреннего сгорания
M Электрический двигатель
TM Трансмиссия
W Ведомые колеса
101 Модуль управления электрической мощностью
103 Батарея
105 Датчик тока
107 Датчик напряжения
111 Память
113 Система управления зарядной емкостью
121 Модуль хранения информации о токе/напряжении
123 Модуль хранения установленных зон
151 Модуль получения информации о токе/напряжении
153 Модуль вычисления внутреннего сопротивления
155 Модуль установки зон
157 Модуль вычисления контрольного SOC
159 Модуль определения зоны батареи
161 Модуль предписания управления



Система управления зарядной емкостью для батареи, предоставленной на транспортном средстве с электрическим двигателем в качестве источника приведения в движение, включает в себя: модуль оценки изношенного состояния, который оценивает изношенное состояние батареи, модуль установки зон, который устанавливает зарядную емкость, когда батарея может использоваться во множестве зон в соответствии с изношенным состоянием батареи, модуль вычисления заряженного состояния, который вычисляет заряженное состояние батареи; модуль определения зоны, который определяет, к какой зоне из множества зон, установленных модулем установки зон, относится заряженное состояние батареи и модуль предписания управления, который предписывает выполнение управления в связи с зарядкой или разрядкой батареи в соответствии с зоной, которая определена модулем определения зоны. Диапазон зарядной емкости, по меньшей мере, одной предварительно определенной зоны из множества зон, установленных модулем установки зон, остается постоянным независимо от изношенного состояния батареи, тогда как диапазоны зарядных емкостей зон, отличных от предварительно определенной зоны, меняются в соответствии с изношенным состоянием батареи. Следовательно, может в достаточной мере демонстрироваться эффективность батареи, при этом сдерживая влияние износа на минимальном уровне. Технический результат заключается в обеспечении заряда батареи с предотвращением ее перезарядки или чрезмерной разрядки. 11 з.п. ф-лы, 9 ил.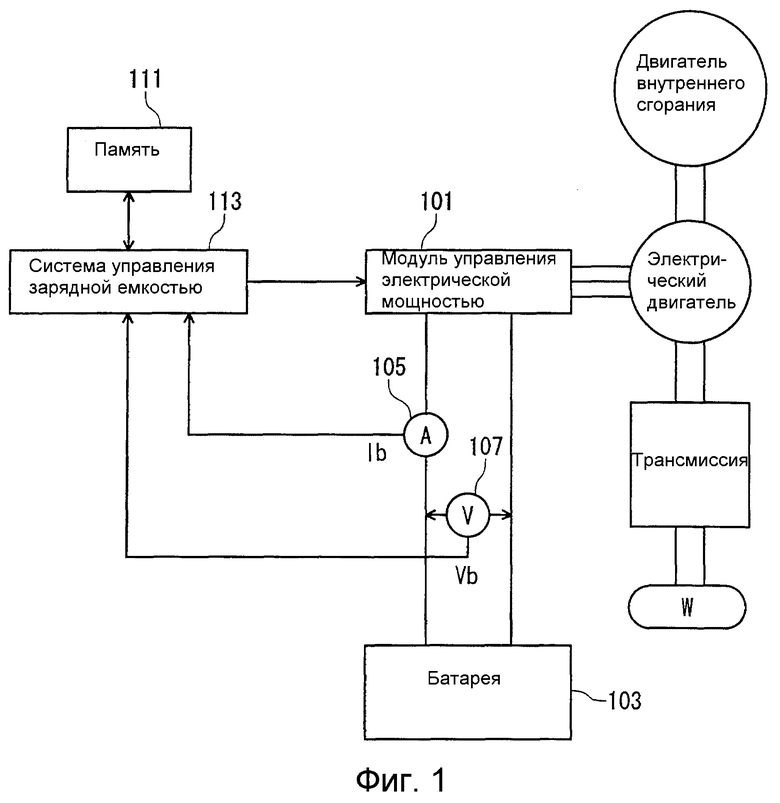
1. Система управления зарядной емкостью для батареи, предоставленной на транспортном средстве с электрическим двигателем в качестве источника приведения в движение, содержащая:
модуль оценки изношенного состояния, который оценивает изношенное состояние батареи;
модуль установки зон, который устанавливает зарядную емкость, когда батарея может быть использована во множестве зон, в соответствии с изношенным состоянием батареи;
модуль вычисления заряженного состояния, который вычисляет заряженное состояние батареи;
модуль определения зоны, который определяет, к какой зоне из множества зон, установленных модулем установки зон, относится заряженное состояние батареи; и
модуль предписания управления, который предписывает выполнение управления, связанного с зарядкой или разрядкой батареи, в соответствии с зоной, которая определена модулем определения зоны, при этом
диапазон зарядной емкости, по меньшей мере, одной предварительно определенной зоны из множества зон, установленных модулем установки зон, остается постоянным независимо от изношенного состояния батареи, тогда как диапазоны зарядных емкостей зон, отличных от предварительно определенной зоны, меняются в соответствии с изношенным состоянием батареи.
2. Система управления зарядной емкостью по п.1, в которой
модуль предписания управления предписывает исполнение различного управления в связи с зарядкой или разрядкой батареи в зависимости от того, к какой зоне из множества зон относится заряженное состояние батареи.
3. Система управления зарядной емкостью по п.1, в которой
диапазоны зарядных емкостей зон, отличных от предварительно определенной зоны, становятся уже с ухудшением изношенного состояния батареи.
4. Система управления зарядной емкостью по п.1, в которой
модуль предписания управления ограничивает или запрещает разрядку батареи в предварительно определенной зоне.
5. Система управления зарядной емкостью по п.4, в которой:
транспортное средство имеет двигатель внутреннего сгорания в качестве источника приведения в движение в дополнение к электрическому двигателю; и
модуль предписания управления запрещает разрядку батареи, но разрешает разрядку батареи для пуска двигателя внутреннего сгорания посредством электрического двигателя в предварительно определенной зоне.
6. Система управления зарядной емкостью по п.1, в которой
предварительно определенной зоной является зона, в которой батарея заряжается и разряжается с наилучшей экономией топлива из множества зон.
7. Система управления зарядной емкостью по пп.1 или 4, в которой:
транспортное средство имеет двигатель внутреннего сгорания, который может приводить в движение электрический двигатель, с тем, чтобы заряжать батарею; и
модуль предписания управления запрещает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания и ограничивает рекуперативную работу электрического двигателя при замедлении транспортного средства.
8. Система управления зарядной емкостью по п.7, в которой
при ограничении рекуперативной работы электрического двигателя модуль предписания управления меняет отношение силы рекуперативного торможения к общей силе торможения во время замедления транспортного средства в соответствии с заряженным состоянием батареи.
9. Система управления зарядной емкостью по п.1, в которой
модуль предписания управления ограничивает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания в зонах, отличных от предварительно определенной зоны.
10. Система управления зарядной емкостью по п.7, в которой
модуль предписания управления ограничивает зарядку батареи посредством приведения в движение электрического двигателя двигателем внутреннего сгорания в зонах, отличных от предварительно определенной зоны.
11. Система управления зарядной емкостью по п.1, в которой:
транспортное средство имеет двигатель внутреннего сгорания в качестве источника приведения в движение в дополнение к электрическому двигателю; и
модуль предписания управления разрешает зарядку батареи и ограничивает приведение в движение транспортного средства только на основе движущей силы электрического двигателя в зонах, отличных от предварительно определенной зоны.
12. Система управления зарядной емкостью по п.1 или 6, в которой
зонами, отличными от предварительно определенной зоны, являются зоны, в которых батарея заряжается или разряжается с наилучшей экономией топлива из множества зон, и степень сужения диапазона зарядной емкости становится в них наименьшей.
| ЗАРЯДНОЕ УСТРОЙСТВО | 1994 |
|
RU2118032C1 |
| Приспособление для подъема затворов гидротехнических сооружений | 1945 |
|
SU66610A1 |
| RU 20106266 C1, 10.03.1998 | |||
| US 20080180064A1, 31.07.2008 | |||

