Область техники
Изобретение относится к технологии управления переключением режима движения гибридного электрического транспортного средства.
Предшествующий уровень техники
Из разработанных в последнее время гибридных электрических транспортных средствах некоторые транспортные средства известны своей способностью переключения между режимом EV, в котором транспортное средство движется от электродвигателей и, используя электроэнергию, подаваемую от приводной батареи, без активации двигателя (внутреннего сгорания), последовательным режимом, в котором транспортное средство движется от электродвигателей, при одновременном генерировании электроэнергии, благодаря тому, что двигатель приводит в действие генератор, и параллельным режимом, в котором транспортное средство движется одновременно с использованием двигателя и электродвигателей.
В патентном документе 1 раскрыто гибридное электрическое транспортное средство, выполненное с возможностью переключения между режимом EV, последовательным режимом и параллельным режимом. Кроме того, раскрыта технология автоматического избирательного выполнения переключения в режим EV при низкой скорости транспортного средства и переключения в параллельный режим при высокой скорости транспортного средства, когда приводная батарея имеет высокий уровень заряда, и переключения в последовательный режим при низкой скорости транспортного средства и переключения в параллельный режим при высокой скорости транспортного средства, когда приводная батарея имеет низкий уровень заряда.
Патентный документ предшествующего уровня техники
[Патентный документ 1]
JP-A-2011-156985
Краткое изложение сущности изобретения
Когда снижается уровень заряда приводной батареи в то время, как, например, транспортное средство, которое переключает режим движения, как описано выше, перемещается с низкой скоростью транспортного средства, режим движения переключают на последовательный режим.
Как описано выше, гибридное электрическое транспортное средство, которое переключается между режимом EV (первый режим движения) и другим режимом (второй режим движения), который подразумевает активацию двигателя, в общем, выполняет операцию управления для автоматического переключения режима движения с режима EV на другой режим, для предотвращения падения уровня заряда приводной батареи ниже допустимого диапазона.
В частности, поскольку приводная батарея установлена на транспортном средстве, емкость приводной батареи имеет ограничение. Кроме того, электроэнергия, подаваемая от приводной батареи, сильно изменяется от выходной мощности приводного электродвигателя (электрического двигателя). В соответствии с этим, когда выполняют управление для переключения режима EV в другой режим, в соответствии с состоянием заряда приводной батареи, как упомянуто выше, необходимо заблаговременно переключать режим EV в другой режим для того, чтобы надежно предотвратить падение уровня заряда ниже допустимого диапазона. Однако переключение режима EV в другой режим, подразумевающий заблаговременную активацию двигателя, приводит к ухудшению потребления топлива, и, следовательно, желательно поддерживать режим EV как можно дольше.
Изобретение было разработано с учетом решения этой задачи и с целью предоставления контроллера переключения режима движения гибридного электрического транспортного средства, который позволяет улучшить потребление топлива путем соответствующего переключения режима движения.
Для решения этой задачи, контроллер переключения режима движения гибридного электрического транспортного средства, которое имеет двигатель, устанавливаемый на транспортном средстве, и приводной электродвигатель для приведения в движение ведущих колес посредством электрической мощности, подаваемой от приводной батареи, и которое перемещается путем переключения между
первым режимом движения, в котором двигатель дезактивирован, и приводной электродвигатель активирован посредством подачи электрической мощности от приводной батареи, для приведения в движение ведущих колес, и
вторым режимом движения, в котором двигатель активирован, и ведущие колеса приводятся в движение посредством мощности привода двигателя, или в котором генератор, подключенный к двигателю, активирован, и приводной электродвигатель активирован для приведения в движение ведущих колес, причем контроллер переключения режима движения, содержит:
блок детектирования состояния заряда, для детектирования состояния заряда приводной батареи;
блок детектирования выходной мощности, запрашиваемой водителем, для детектирования выходной мощности, запрашиваемой водителем, по величине срабатывания педали акселератора транспортного средства;
блок коррекции, для вычисления выходной мощности запрашиваемой транспортным средством, путем выполнения коррекции выходной мощности, запрашиваемой водителем; и
блок управления переключением, для управления переключением с первого режима движения на второй режим движения, когда запрос выходной мощности транспортного средства превышает пороговое значение выходной мощности, на основе состояния заряда приводной батареи, причем
блок управления переключением устанавливает пороговое значение выходной мощности на низком уровне, по мере понижения состояния заряда, изменяя, таким образом, условия для переключения первого режима движения на второй режим движения.
Контроллер переключения режима движения гибридного транспортного средства может быть выполнен таким образом, что блок коррекции выполняет процесс демпфирования для уменьшения величины изменения выходной мощности, запрашиваемого водителем, чтобы, таким образом, вычислять выходную мощность, запрашиваемую транспортным средством.
Контроллер переключения режима движения гибридного транспортного средства может быть выполнен таким образом, что блок коррекции устанавливает малую постоянную времени, которая представляет собой скорость уменьшения величины изменения выходной мощности, запрашиваемой водителем, используемую в процессе демпфирования, по мере понижения состояния заряда.
Контроллер переключения режима движения гибридного транспортного средства может быть выполнен таким образом, что: пороговое значение выходной мощности повышается с первой скоростью увеличения, по мере увеличения состояния заряда, в состоянии, когда состояние заряда приводной батареи равно или ниже, чем заданное состояние заряда, и пороговое значение выходной мощности увеличивается со второй скоростью увеличения, которая больше, чем первая скорость увеличения, по мере увеличения состояние заряда в состояние, когда состояние заряда приводной батареи выше, чем заданное состояние заряда.
Краткое описание чертежей
На фиг.1 показана схема включения гибридного электрического транспортного средства в варианте осуществления изобретения.
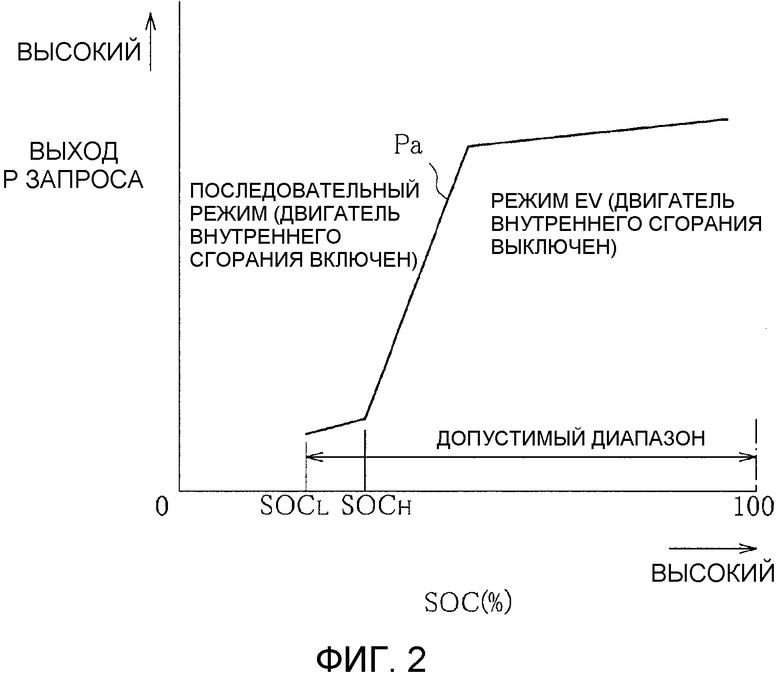
На фиг.2 представлена карта для определения переключения между режимом EV и последовательным режимом в варианте осуществления.
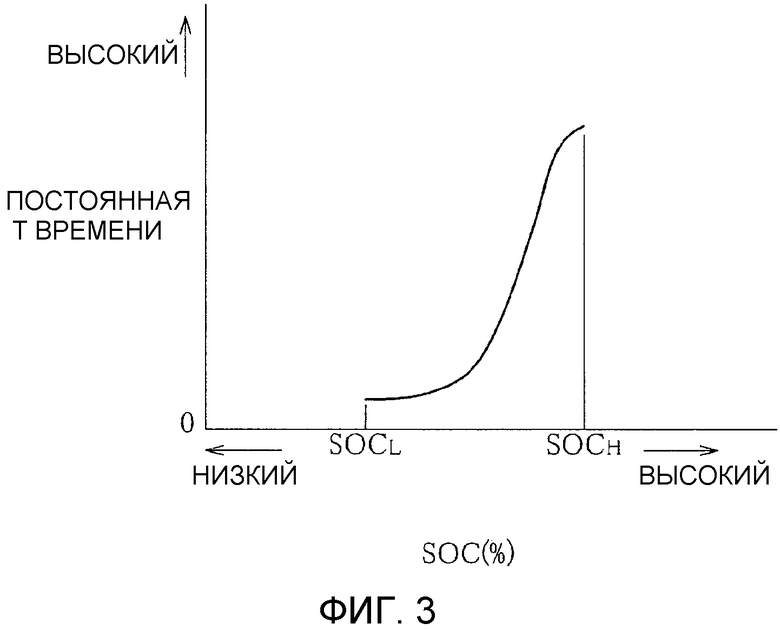
На фиг.3 показана карта для установки постоянной времени фильтра, в соответствии с вариантом осуществления.
Описание предпочтительных вариантов изобретения
Вариант осуществления изобретения описан ниже со ссылкой чертежи.
На фиг.1 показана схема подключения гибридного электрического транспортного средства (ниже называемого “транспортным средством 1”) в соответствии с вариантом осуществления изобретения.
Транспортное средство 1, в соответствии с вариантом осуществления, представляет собой транспортное средство с приводом на четыре колеса, которое может перемещаться в результате приведения в движение передних колес 3 посредством выходной мощности от двигателя 2, и в котором установлен передний электродвигатель 4 (приводной электродвигатель) для приведения в движение передних колес 3 и задний электродвигатель 6 (приводной электродвигатель) для приведения в движение задних колес 5.
Двигатель 2 может приводить в движение ведущий вал 8 передних колес 3 через редуктор 7 скорости и также генерировать электричество в результате приведения в движение генератора 9 через редуктор 7 скорости.
Передний электродвигатель 4 приводится в движение при подаче в него высоковольтного электричества от приводной батареи 11, которая установлена в транспортном средстве 1, и генератора 9 через передний инвертор 10, с тем, чтобы, таким образом, приводить в движение ведущий вал 8 передних колес 3 через редуктор 7 скорости. Редуктор 7 скорости имеет встроенное сцепление 7a, которое позволяет переключаться между подключением и отключением передачи мощности между выходным валом двигателя 2 внутреннего сгорания и ведущим валом 8 передних колес 3.
Задний электродвигатель 6, при подаче в него электроэнергии высокого напряжения от приводной батареи 11 и генератора 9 через задний инвертор 12, приводится в движение, вращая, таким образом, ведущий вал 14 задних колес 5 через редуктор 13 скорости.
Электроэнергия, генерируемая генератором 9, может использоваться для подачи электроэнергии к переднему электродвигателю 4 и заднему электродвигателю 6, а также для заряда приводной батареи 11 через передний инвертор 10.
Приводная батарея 11 состоит из аккумуляторной батареи, такой как литий-ионная батарея, и включает в себя непоказанный блок аккумуляторной батареи, состоящей из встроенного множества элементов аккумуляторной батареи. Кроме того, в приводной батарее 11 предусмотрен блок 11a мониторинга аккумуляторной батареи (блок детектирования состояния заряда), предназначенный для отслеживания температуры и состояния заряда (ниже сокращенно называется “SOC”) блока аккумуляторной батареи.
Передний инвертор 10 имеет блок 10a управления передним электродвигателем и блок 10b управления генератором. Блок 10a управления передним электродвигателем управляет выходной мощностью переднего электродвигателя 4 в соответствии с сигналом управления от блока 20 гибридного управления. Блок 20 гибридного управления включает в себя блок управления переключением и блок детектирования выходной мощности, запрашиваемой водителем. Блок 10b управления генератором имеет функцию управления количеством электричества, генерируемого генератором 9, в соответствии с сигналом управления от блока 20 гибридного управления.
Задний инвертор 12 имеет блок 12a управления задним электродвигателем. Блок 12a управления задним электродвигателем имеет функцию управления выходной мощностью заднего электродвигателя 6, в соответствии с сигналом управления от блока 20 гибридного управления.
В транспортном средстве 1 также установлено зарядное устройство 21 аккумуляторной батареи, которое заряжает приводную батарею 11 от внешнего источника питания.
Блок 20 гибридного управления представляет собой контроллер, который полностью управляет транспортным средством 1, и включает в себя устройство ввода-вывода, запоминающее устройство, блок цифровой обработки (CPU), таймер и другие. Устройство памяти может представлять собой ROM, RAM, энергонезависимое RAM и т.п.
Блок 11a мониторинга аккумуляторной батареи для приводной батареи 11, блок 10a управления передним электродвигателем и блок 10b управления генератора переднего инвертора 10, блок 12a управления задним электродвигателем заднего инвертора 12, блок 22 управления двигателем, предназначенный для управления работой двигателя 2, и датчик 40 угла педали акселератора, предназначенный для детектирования угла педали акселератора, подключены к входной стороне блока 20 гибридного управления. Информация детектирования и информация активации, выводимая из этих модулей, поступает в блок 20 гибридного управления.
В то же время, блок 10a управления передним электродвигателем и блок 10b управления генератором переднего инвертора 10, блок 12a управления задним электродвигателем заднего инвертора 12, редуктор 7 скорости, имеющий сцепление 7a, и блок 22 управления двигателем внутреннего сгорания соединены с выходной стороной блока 20 гибридного управления.
Блок 20 гибридного управления вычисляет выходную мощность P, запрашиваемую транспортным средством, которая необходима для обеспечения движения транспортного средства, по различным частям информации детектирования и активации, и передает сигналы управления в блок 22 управления двигателем, блок 10a управления передним электродвигателем, блок 10b управления генератором, блок 12a управления задним электродвигателем, и редуктор 7 скорости, переключая, таким образом, режим движения и управляя выходной мощностью двигателя 4, выходной мощностью переднего электродвигателя 9 и выходной мощностью заднего электродвигателя 11, и количеством электроэнергии, генерируемой генератором 9. Режим движения включает в себя режим EV (электрическое транспортное средство) (первый режим движения), последовательный режим (второй режим движения) и параллельный режим (второй режим движения).
В режиме EV (первый режим движения), двигатель 2 дезактивирован, и передний электродвигатель 4 и задний электродвигатель 6 активированы посредством подачи электроэнергии от приводной батареи 11, для обеспечения движения транспортного средства.
В последовательном режиме (второй режим движения), муфта 7a редуктора 7 скорости отключена, и двигатель 2 активирует генератор 9. Передний электродвигатель 4 и задний электродвигатель 6 активируют, используя электроэнергию, генерируемую генератором 9, и электроэнергию, подаваемую от приводной батареи 11, обеспечивая, таким образом, движение транспортного средства. Кроме того, в последовательном режиме, скорость вращения двигателя 2 поддерживается в пределах диапазона наилучшего потребления топлива, и электроэнергию, генерируемую, благодаря избыточной выходной мощности, подают к приводной батарее 11, заряжая, таким образом, приводную батарею 11.
В параллельном режиме (второй режим движения) сцепление 7a редуктора 7 скорости включено так, чтобы механически передавать мощность привода от двигателя 2 через редуктор 7 скорости и приводить в движении передние колеса 3. Кроме того, передний электродвигатель 4 и задний электродвигатель 6 активируют от электроэнергии, которая генерируется в результате активации генератора 9 двигателем 2 и подачи электроэнергии от приводной батареи 11, обеспечивая, таким образом, движение транспортного средства.
В диапазоне, когда двигатель 2 проявляет отличную эффективность, таком, как диапазон высокой скорости, блок 20 гибридного управления переключает режим движения на параллельный режим. В диапазоне, за исключением параллельного режима, другими словами, в диапазонах средней и низкой скорости, происходит переключение между режимом EV и последовательным режимом.
Когда SOC приводной батареи 11 падает ниже допустимого диапазона, блок 20 гибридного управления коэрцитивно активирует двигатель 2, с тем, чтобы, таким образом, генерировать электроэнергию и подзарядить приводную батарею 11. Учитывая, что значение нижнего предела допустимого диапазона SOC приводной батареи 11 представляет собой SOCL, допустимый диапазон определяют как, например, SOCL от 100%.
Кроме того, в варианте осуществления, переключение между режимом EV и последовательным режимом выполняют на основе SOC приводной батареи 11 и запрашиваемой выходной мощности P, которая генерируется при выполнении коррекции выходной мощности, запрашиваемой водителем, детектируемой блоком детектирования выходной мощности, запрашиваемой водителем, в модуле 20 гибридного управления, в соответствии с величиной операции, выполняемой с педалью акселератора.
На фиг.2 показана карта для определения переключения между режимом EV и последовательным режимом, используемая в варианте осуществления.
Блок 20 гибридного управления предварительно сохраняет карту определения переключения, такую как показана на фиг.2, и делает выбор между режимом EV и последовательным режимом в пределах рабочего диапазона, за исключением рабочего диапазона параллельного режима.
Блок 20 гибридного управления определяет пороговое значение Pa (пороговое значение выходной мощности) для выходной мощности, запрашиваемой транспортным средством, соответствующей SOC приводной батареи 11, используя карту, показанную на фиг.2. Когда выходная мощность P, запрашиваемая транспортным средством равна пороговому значению Pa или больше, режим движения переключают на последовательный режим путем активации двигателя 2. В отличие от этого, когда выходная мощность P, запрашиваемая транспортным средством ниже, чем пороговое значение Pa, режим движения переключают на режим EV путем отключения двигателя 2.
Как показано на фиг.2, в варианте осуществления, пороговое значение Pa установлено, как другое значение SOC приводной батареи 11. Более конкретно, пороговое значение Pa устанавливают более высоким по мере увеличения SOC, в то время, как пороговое значение Pa устанавливают более низким при снижении SOC. Кроме того, когда SOC находится в низком диапазоне (от SOCL до SOCH на фиг.2) в пределах допустимого диапазона, скорость увеличения порогового значения Pa (то есть, градиент порогового значения Pa на фиг.2) относительно увеличения SOC устанавливают так, чтобы она стала сравнительно меньшей скоростью (первая скорость увеличения). Кроме того, когда SOC превышает, например, SOCH, скорость повышения порогового значения Pa устанавливают так, чтобы она была сравнительно большей скоростью (второй скоростью увеличения), таким образом, что режим движения более вероятно устанавливают в режим EV, даже когда выходная мощность P, запрашиваемая транспортным средством, является высокой.
На фиг.3 показана карта для установки постоянной времени фильтра 20a, в соответствии с вариантом осуществления.
Блок 20 гибридного управления имеет фильтр 20a (блок коррекции) для преобразования выходной мощности, запрашиваемой водителем, в выходную мощность P, запрашиваемую транспортным средством с помощью блока демпфирования. Фильтр 20a выполняет коррекцию для демпфирования резкого изменения (величины изменения) выходной мощности, запрашиваемой водителем. При этом определяют, следует ли выполнить переключение между режимом EV и последовательным режимом, используя выходную мощность P, запрашиваемую транспортным средством, которая была сглажена фильтром 20a. Например, когда выходная мощность, запрашиваемая водителем, меняется в непосредственной близости к пороговому значению Pa, изменение выходной мощности P, запрашиваемой транспортным средством, таким образом, демпфируют так, что частота возникновения переключения режима понижается, чтобы, таким образом, предотвратить слишком частое включение и выключение двигателя.
Кроме того, постоянная времени T, представляющая интенсивность процесса демпфирования фильтра 20a, меняется на основе SOC. В частности, как показано на фиг.3, когда SOC увеличивается (то есть, SOC приближается к SOCH) в низком диапазоне, в пределах допустимого диапазона SOC, процесс демпфирования выполняют интенсивно путем увеличения постоянной времени T. В отличие от этого, когда SOC понижается (SOC приближается к SOCL), демпфирование выполняют менее интенсивно в результате уменьшения постоянной времени T.
В варианте осуществления, что касается переключения между режимом EV и последовательным режимом, когда выходная мощность P, запрашиваемая транспортным средством равна пороговому значению Pa или больше, режим движения переключают на последовательный режим с помощью блока выполнения операции управления, как описано выше. Когда выходная мощность P, запрашиваемая транспортным средством меньше, чем пороговое значение Pa, режим движения переключают в режим EV. В соответствии с этим, когда приводная батарея 11 потребляет мало энергии, режим EV выбирают для улучшения потребления топлива. В отличие от этого, когда приводная батарея 11 потребляет много энергии, выбирают последовательный режим для предотвращения падения SOC приводной батареи 11.
Кроме того, в варианте осуществления, пороговое значение Pa для определения переключения между режимом EV и последовательным режимом изменяют на основе SOC. Когда SOC высокий, пороговое значение Pa устанавливают высоким. Даже когда выходная мощность P, запрашиваемая транспортным средством, высокая, режим движения, таким образом, более вероятно, устанавливают, как режим EV, так, что потребление топлива может быть улучшено. Когда SOC низкий, пороговое значение Pa устанавливают низким. В соответствии с этим, режим движения, более вероятно, устанавливают, как последовательный режим, так, что возникновение падения в SOC может быть сдержано.
Переключение между режимом EV и последовательным режимом выполняют на основе выходной мощности P, запрашиваемой транспортным средством и SOC, как описано выше, в результате чего, переключение между режимом EV и последовательным режимом соответствующим образом выполняют в ответ на изменение выходной мощности P, запрашиваемой транспортным средством. Возможности для использования режима EV, таким образом, увеличиваются, так, что можно улучшить потребление топлива.
В варианте осуществления фильтр 20a подвергает выходную мощность, запрашиваемую водителем, процессу демпфирования в низком диапазоне SOC (например, от SOCL до SOCH) в пределах допустимого диапазона, в результате чего, изменение выходной мощности P, запрашиваемой транспортным средством, демпфируется. Частота возникновения переключения между режимом EV и последовательным режимом; другими словами, частота возникновения переключения между активацией и дезактивацией двигателя 2 становится меньшей, так что пассажиры транспортного средства ощущают меньший дискомфорт.
Кроме того, постоянная времени T для процесса демпфирования, выполняемого фильтром 20a, изменяется на основе SOC. Когда SOC становится высоким (SOC приближается к SOCH), постоянная времени T увеличивается, с тем, чтобы, таким образом, интенсивно выполнить процесс демпфирования. Изменение выходной мощности P, запрашиваемой транспортным средством, которое могло бы произойти в ответ на выходную мощность, запрашиваемую водителем, может быть демпфировано так, что переключение в последовательный режим затрудняется. Таким образом, можно дополнительно улучшить потребление топлива. Кроме того, постоянную времени T устанавливают низкой по мере уменьшения SOC (или по мере приближения к SOCL), что, таким образом, делает процесс демпфирования менее интенсивным. Вследствие этого, режим движения менее вероятно меняется с режима EV на последовательный режим, когда возникают изменения выходной мощности, запрашиваемой водителем. Падение SOC приводной батареи 11 можно дополнительно демпфировать таким образом, что можно надежно предотвратить падение SOC ниже допустимого диапазона.
Поэтому, даже когда происходит изменение выходной мощности, запрашиваемой водителем, SOC приводной батареи 11 может стабильно поддерживаться в низком диапазоне (от SOCL до SOCH), в пределах допустимого диапазона, путем изменения постоянной времени T процесса демпфирования для выходной мощности, запрашиваемой транспортным средством, на основе SOC. Это позволяет надежно предотвратить падение SOC ниже допустимого диапазона, и дополнительно увеличивает вероятность использования режима EV, что позволяет ожидать дополнительного улучшения потребления топлива.
Как описано выше, в соответствии с контроллером переключения режима движения гибридного транспортного средства, в соответствии с изобретением, выходная мощность, запрашиваемая транспортным средством, рассчитывается путем выполнения коррекции выходной мощности, запрашиваемой водителем, детектированной по величине операций педали акселератора. Когда выходная мощность, запрашиваемая транспортным средством, превышает пороговое значение выходной мощности на основе SOC приводной батареи в ходе движения транспортного средства в первом режиме движения, первый режим движения переключают на второй режим движения, таким образом, что можно сдержать падение SOC приводной батареи.
Кроме того, пороговое значение для использования при определении переключения с первого режима движения на второй режим движения устанавливают низким, при уменьшении SOC приводной батареи. В соответствии с этим, режим движения, более вероятно, переключается во второй режим движения при низком SOC, предотвращая, таким образом, возникновение падения SOC приводной батареи. В то же время, переключение режима движения на второй режим движения делают менее вероятным при высоком SOC, предотвращая, таким образом, активацию двигателя, так, что можно ожидать улучшения потребления топлива.
Переключение между первым режимом движения и вторым режимом движения выполняют в соответствии с SOC и выходной мощности, запрашиваемой транспортным средством, на основе выходной мощности, запрашиваемой водителем, в результате чего, переключение между первым режимом движения и вторым режимом движения можно, соответственно, выполнять в соответствии с изменением выходной мощности, запрашиваемой водителем. Таким образом, можно ожидать улучшения потребления топлива в результате увеличения вероятности использования первого режима движения.
Кроме того, выходная мощность, запрашиваемая транспортным средством, рассчитывается путем выполнения процесса демпфирования для уменьшения величины изменения выходной мощности, запрашиваемой водителем, и, следовательно, сдерживания изменения выходной мощности, запрашиваемой транспортным средством. В соответствии с этим, когда возникают изменения выходной мощности, запрашиваемой транспортным средством в непосредственной близости к пороговому значению выходной мощности, частота переключения между первым режимом движения и вторым режимом движения, другими словами, частота включения и выключения двигателя, уменьшается, так, что ощущение дискомфорта для пассажиров транспортного средства может быть снижено.
Поскольку постоянная времени процесса демпфирования блока коррекции установлена малой, при уменьшении SOC, режим EV, более вероятно, переключается на последовательный режим при низком SOC во время возникновения изменения запрашиваемой выходной мощности, так, что можно дополнительно предотвратить падение величины электрического заряда в приводной батарее. В то же время, уменьшают вероятность переключения режима движения на последовательный режим при высоком SOC, так, что можно ожидать дополнительного улучшения потребления топлива.
Изобретение, в соответствии с настоящей заявкой, не ограничено вариантом осуществления. Например, в отношении карты, показанной на фиг.2, единственное требование состоит в установлении порогового значения Pa выходной мощности, запрашиваемой транспортным средством для эффективного переключения на последовательный режим при увеличении SOC. В качестве альтернативы, пороговое значение также может быть установлено с возможностью последовательного или ступенчатого изменения. Кроме того, изменение также может быть выполнено, если необходимо, в карте, представленной на фиг.3. Однако, как показано на фиг.3, желательно устанавливать высокую постоянную времени T процесса демпфирования, по мере увеличения SOC.
Кроме того, в варианте осуществления, изобретение применяется для схемы подключения гибридного электрического транспортного средства, выполненного с возможностью переключения между режимом EV, последовательным режимом и параллельным режимом. Однако изобретение может широко применяться для гибридного электрического транспортного средства, выполненного с возможностью переключения, по меньшей мере, между режимом EV и последовательным режимом, или между режимом EV и параллельным режимом.
Список номеров ссылочных позиций
1 ТРАНСПОРТНОЕ СРЕДСТВО
2 ДВИГАТЕЛЬ
4 ПЕРЕДНИЙ ЭЛЕКТРОДВИГАТЕЛЬ (ПРИВОДНОЙ ЭЛЕКТРОДВИГАТЕЛЬ)
6 ЗАДНИЙ ЭЛЕКТРОДВИГАТЕЛЬ (ПРИВОДНОЙ ЭЛЕКТРОДВИГАТЕЛЬ)
9 ГЕНЕРАТОР
11 ПРИВОДНАЯ БАТАРЕЯ
11a БЛОК МОНИТОРИНГА АККУМУЛЯТОРНОЙ БАТАРЕИ
11a (БЛОК ДЕТЕКТИРОВАНИЯ SOC)
20 БЛОК ГИБРИДНОГО УПРАВЛЕНИЯ (БЛОК УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ, БЛОК ДЕТЕКТИРОВАНИЯ ВЫХОДНОЙ МОЩНОСТИ, ЗАПРАШИВАЕМОЙ ВОДИТЕЛЕМ)
20a ФИЛЬТР (БЛОК КОРРЕКЦИИ).
Изобретение относится к технологии управления переключением режима движения гибридного транспортного средства. Контроллер переключения режима движения гибридного электрического транспортного средства, которое перемещается, переключая режимы движения, содержит блок детектирования состояния заряда; блок детектирования выходной мощности, запрашиваемой водителем; блок коррекции выходной мощности, запрашиваемой водителем и блок управления переключением. Блок управления переключением устанавливает пороговое значение выходной мощности низкого уровня, по мере понижения состояния заряда, изменяя, таким образом, условия для переключения первого режима движения на второй режим движения. Достигается оптимизация потребления топлива. 3 з.п. ф-лы, 3 ил.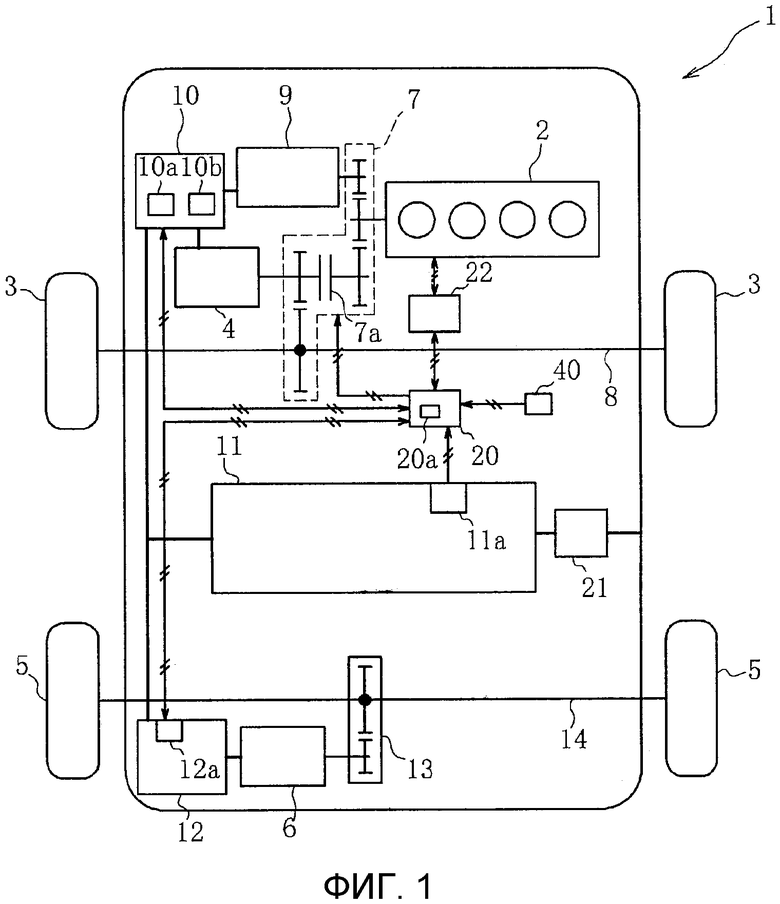
1. Контроллер переключения режима движения гибридного электрического транспортного средства, которое имеет двигатель внутреннего сгорания, устанавливаемый на транспортном средстве, и приводной электродвигатель для приведения в движение ведущих колес от электрической мощности, подаваемой от приводной батареи, и которое перемещается путем переключения между
первым режимом движения, в котором двигатель дезактивирован, и приводной электродвигатель активирован посредством электрической мощности, поданной от приводной батареи, для активации ведущих колес, и
вторым режимом движения, в котором двигатель активирован, и ведущие колеса приводятся в движение посредством приводной мощности двигателя, или в котором генератор, подключенный к двигателю, активирован, и приводной электродвигатель активирован для приведения в движение ведущих колес, причем контроллер переключения режима движения, содержит:
блок детектирования состояния заряда, для детектирования состояния заряда приводной батареи;
блок детектирования выходной мощности, запрашиваемой водителем, для детектирования выходной мощности, запрашиваемой водителем, по величине срабатывания педали акселератора транспортного средства;
блок коррекции, для вычисления запрашиваемой выходной мощности транспортного средства, путем выполнения коррекции в отношении выходной мощности, запрашиваемой водителем; и
блок управления переключением, для управления переключением с первого режима движения на второй режим движения, когда запрос выходной мощности транспортного средства превышает пороговое значение выходной мощности, на основе состояния заряда приводной батареи, причем
блок управления переключением устанавливает пороговое значение выходной мощности низкого уровня, по мере понижения состояния заряда, изменяя, таким образом, условия для переключения первого режима движения на второй режим движения.
2. Контроллер переключения режима движения гибридного транспортного средства по п.1, в котором блок коррекции выполняет процесс демпфирования для уменьшения величины изменения выходной мощности, запрашиваемой водителем, чтобы, таким образом, вычислить выходную мощность, запрашиваемую транспортным средством.
3. Контроллер переключения режима движения гибридного транспортного средства по п.2, в котором блок коррекции устанавливает малую постоянную времени, которая представляет собой скорость уменьшения величины изменения выходной мощности, запрашиваемой водителем, используемой в процессе демпфирования, по мере понижения состояния заряда.
4. Контроллер переключения режима движения гибридного транспортного средства по любому из пп.1-3, в котором
пороговое значение выходной мощности повышается с первой скоростью увеличения, по мере увеличения состояния заряда, в состоянии, когда состояние заряда приводной батареи равно или ниже, чем заданное состояние заряда, и
пороговое значение выходной мощности увеличивается со второй скоростью увеличения, которая больше, чем первая скорость увеличения, по мере увеличения состояния заряда, в состоянии, когда состояние заряда приводной батареи выше, чем заданное состояние заряда.
| WO 03072389 A1, 04.09.2003 | |||
| US 8296002 B2, 23.10.2012 | |||
| JP 2012224321 A, 15.11.2012 | |||
| JP 2012224162 A, 15.11.2012 | |||
| JP 2011246069 A, 08.12.2011 |

