Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе управления трансмиссией (коробкой передач) с несколькими сцеплениями согласно преамбуле независимых пунктов формулы изобретения.
Настоящее изобретение также относится к системе управления трансмиссией, компьютерному программному продукту и запоминающей среде компьютера, при этом все из перечисленного предназначено для применения с компьютером для осуществления упомянутого способа.
Уровень техники
Из уровня техники известны автоматические и полуавтоматические системы механических трансмиссий транспортных средств. Обычно такие системы содержат многоступенчатую механическую коробку передач, по меньшей мере одно фрикционное сцепление, с возможностью передачи приводного усилия установленное между двигателем и трансмиссией, и центральный процессор или контроллер для приема входных сигналов датчиков и передачи выходных сигналов управления исполнительным элементам для управления трансмиссией.
Из уровня техники, например из патента US 4576065, также известно скачкообразное переключение передач автоматической/полуавтоматической трансмиссии, т.е. прямое переключение на несколько ступеней передачи.
В трансмиссии с несколькими сцеплениями, такой как трансмиссия с двойным сцеплением (ТДС), в большинстве случаев предпочтительным может являться переключение под нагрузкой.
В некоторых условиях эксплуатации транспортного средства, оснащенного ТДС, водитель может передавать команду скачкообразного переключения с ранее включенного передаточного отношения на желаемое передаточное отношение. Обычно скачкообразные переключения на более высокую передачу требуются в ситуациях, когда транспортное средство имеет относительно небольшую нагрузку, движется по ровной поверхности или вниз по склону и при ускорении мощного транспортного средства. Это объясняется тем фактом, что в таких условиях частота вращения двигателя после переключения под нагрузкой на более высокую передачу может превышать частоту вращения при переключении на более высокую передачу или приближаться к ней, в результате чего возникает небольшой временной интервал между последовательными переключениями на более высокую передачу, и увеличивается число переключений передачи. Скачкообразные переключение передач используются, чтобы избежать последовательности быстрых разовых переключений на более высокую передачу и осуществлять прямое переключение на желаемое более низкое передаточное отношение (более высокую передачу). Такая стратегия скачкообразного переключения может продлевать срок службы сцепления и повышать комфортность вождения.
Аналогичное условие эксплуатации транспортного средства может возникать при определенных дорожных условиях, таких как преодоление крутого подъема автомобилем большой грузоподъемности, когда его сопротивление движению является очень высоким, и ТДС быстро осуществляет несколько последовательных переключений под нагрузкой на более низкую передачу. В этом случае также увеличивается износ сцепления и снижается комфортность вождения.
Скачкообразное переключение передач может приводиться в действие, например, путем нажатия водителем на кнопку скачкообразного переключения передач. С учетом других задач, стоящих перед водителем, он может вообще не пользоваться кнопкой скачкообразного переключения передач или включать ее в неверный момент времени, что приводит к полной потере выгод функции скачкообразного переключения передач. Недостатком описанной выше системы является то, что задача приведения в действие кнопки скачкообразного переключения передач возлагается в ней на водителя. Уровень техники, охарактеризованный в преамбуле п.1 прилагаемой формулы изобретения, раскрыт в заявке DE 102005028551.
Раскрытие изобретения
В основу настоящего изобретения положена задача создания усовершенствованного способа и устройства для управления трансмиссией с несколькими сцеплениями без одновременного участия водителя транспортного средства.
Решение задач изобретения обеспечивается за счет признаков независимых пунктов формулы изобретения. В других пунктах формулы изобретения и описании раскрыты выгодные варианты осуществления изобретения.
Согласно первой особенности изобретения предложен способ управления трансмиссией с несколькими сцеплениями, которая с возможностью передачи приводного усилия может соединяться с первичным двигателем, установленным на транспортном средстве для сообщения ему движения, включающий стадии:
использования блока управления для управления по меньшей мере первичным двигателем и трансмиссией,
использования модели для прогнозирования, содержащей по меньшей мере одну смоделированную последовательность переключений трансмиссии,
при этом способ отличается тем, что дополнительно включает стадии:
прогнозирования временного интервала между первым и вторым переключениями трансмиссии под нагрузкой на более высокую передачу или между первым и вторым переключениями трансмиссии под нагрузкой на более низкую передачу на основании по меньшей мере одной модели для прогнозирования,
изменения по меньшей мере одного параметра управления трансмиссией, если прогнозируемый временной интервал между первым и вторым переключениями трансмиссии под нагрузкой на более высокую/низкую передачу является меньшим, чем заданный предельный временной интервал.
Способ отличается тем, что упомянутый параметр управления трансмиссией изменяют путем выполнения по меньшей мере одной из следующих стадий:
снижения первой предельной частоты вращения при переключении,
повышения второй предельной частоты вращения при переключении,
при этом упомянутые предельные частоты вращения могут быть изменены в максимальной степени только при условии, что крутящий момент первичного двигателя остается в диапазоне максимальных крутящих моментов.
Согласно одному из дополнительных вариантов осуществления изобретения способ дополнительно включает стадию передачи блоку управления информации о частоте вращения двигателя, скорости автомобиля, положении педали акселератора и дорожных условиях.
В другом варианте осуществления изобретения заданный предельный временной интервал составляет менее 1 секунды.
В одном из дополнительных вариантов осуществления прогнозирование временного интервала между первым и вторым переключениями на более высокую/низкую передачу осуществляется блоком управления путем моделирования в реальном времени.
В другом варианте осуществления изобретения первым переключением под нагрузкой на более высокую/низкую передачу и вторым переключением под нагрузкой на более высокую/низкую передачу являются последовательные переключения под нагрузкой.
В одном из дополнительных вариантов осуществления параметром управления трансмиссией является первая предельная частота вращения при первом переключении под нагрузкой на более высокую/низкую передачу и вторая предельная частота вращения при втором переключении под нагрузкой на более высокую/низкую передачу.
В одной из дополнительных разновидностей этого варианта осуществления выбирают две или более ступеней традиционного (обычного) переключения на более высокую/низкую передачу, если прогнозируемый временной интервал превышает заданный временной интервал даже после того, как предельные частоты вращения при переключении передач были изменены в максимальной степени.
В другом варианте осуществления изобретения параметром управления трансмиссией являются по меньшей мере две последовательности переключения. В одной из дополнительных разновидностей этого варианта осуществления по меньшей мере последовательности переключения представляют собой одно из следующего:
последовательное переключение под нагрузкой на более высокую передачу и две или более ступеней традиционного переключения на более высокую передачу;
последовательное переключение под нагрузкой на более низкую передачу и две или более ступеней традиционного переключения на более низкую передачу.
В еще одном из дополнительных вариантов осуществления упомянутые две или более ступеней традиционного переключения на более высокую/низкую передачу выбирают, если прогнозируемый временной интервал при первом переключении под нагрузкой на более высокую передачу и втором переключении под нагрузкой на более высокую передачу или при первом переключении под нагрузкой на более низкую передачу и втором переключении под нагрузкой на более низкую передачу является меньшим, чем заданный предельный временной интервал.
В изобретении также предложена система управления трансмиссией, в которую входит блок управления, служащий для управления трансмиссией с несколькими сцеплениями, отличающаяся тем, что блок управления запрограммирован на выполнение стадий способа согласно первому описанному варианту осуществления.
Преимуществами изобретения являются повышенная комфортность хода и уменьшенный износ сцепления.
Краткое описание чертежей
Настоящее изобретение и его упомянутые и другие задачи и преимущества могут быть лучше поняты из следующего далее подробного описания вариантов осуществления, при этом изобретение не ограничено этими вариантами осуществления. На чертежах:
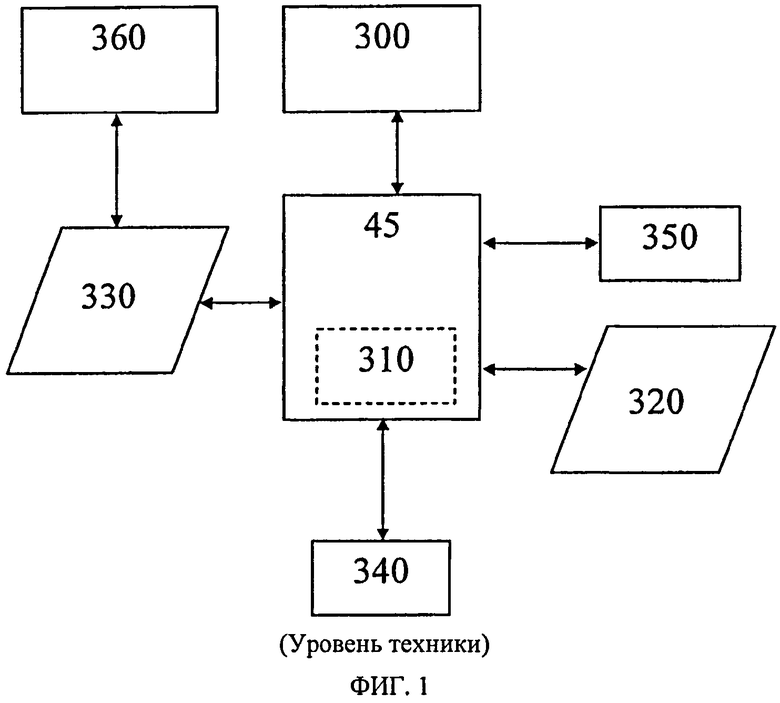
на фиг.1 показан общий вид входных данных, вводимых в блок управления согласно известному уровню техники,
на фиг.2, 3 и 5 - временные зависимости частоты вращения двигателя для различных смоделированных последовательностей переключения передач, со ссылкой на которые пояснены различные варианты осуществления изобретения,
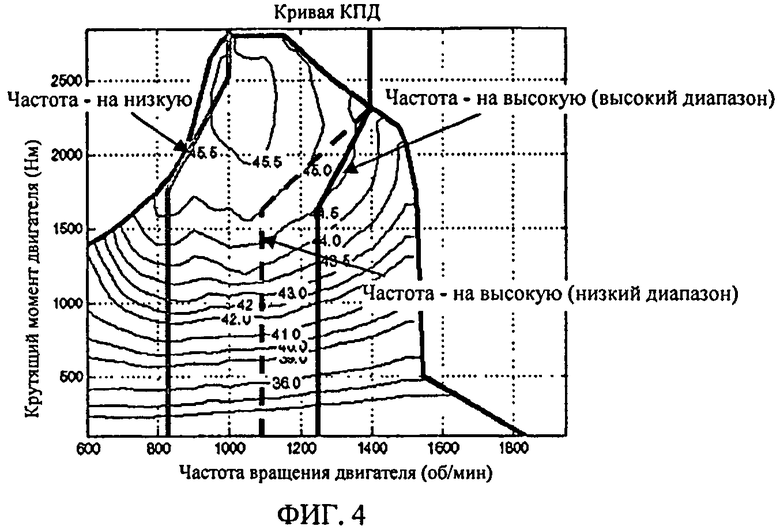
на фиг.4 - зависимость крутящего момента двигателя от частоты вращения двигателя и диапазона максимальных крутящих моментов двигателя,
на фиг.6 - применение изобретения в компьютерной среде.
Подробное описание осуществления изобретения
Одинаковые или сходные элементы обозначены на чертежах одинаковыми цифровыми позициями. Чертежи являются лишь схематическим представлением и не предназначены для отображения конкретных параметров изобретения. Кроме того, поскольку чертежи предназначены для иллюстрации только типичных вариантов осуществления изобретения, их не следует считать ограничивающими объем изобретения.
На фиг.1 схематически проиллюстрирована модель для прогнозирования и входные данные, которые необходимы блоку 45 управления, чтобы он мог осуществлять компьютерное моделирование. Модель для прогнозирования может быть реализована в транспортном средстве (далее - автомобиль), которой имеет первичный двигатель (например, двигатель внутреннего сгорания), который с возможностью передачи приводного усилия соединен с трансмиссией с несколькими сцеплениями (такой как ТДС), управляемой блоком 45 управления, при этом выходной вал ТДС может быть с возможностью передачи приводного усилия соединен в ведомыми колесами автомобиля. Моделированием можно управлять с помощью одного переключателя 300 для ручного или автоматического взвешивания параметра управления, обеспечивающего критерий управления автомобилем, выбранный водителем. Водитель может выбирать в качестве приоритета, например, низкий расход топлива (например, для экономичного управления автомобилем), постоянную скорость автомобиля (например, для движения с высокой средней скоростью), определенный уровень выбросов (например, для безвредного для окружающей среды управления автомобилем) или (взвешенное) сочетание упомянутых параметров управления. Для автоматического взвешивания параметра управления используется хранящаяся в блоке управления модель, в которой учтены различные параметры, такие как положение открытия дроссельной заслонки и масса автомобиля. Параметры управления имеют различные весовые значения при различных передачах.
Например, низкий расход топлива имеет высокий приоритет при высоких передачах, а для автомобиля большой грузоподъемности, преодолевающего подъем, большое весовое значение имеет средняя скорость. Переключатель 300 приспособлен для поддержания связи с блоком 45 управления. В блоке 45 управления хранятся данные 310, отображающие движение педали, т.е. крутящий момент двигателя в зависимости от числа оборотов в минуту при различных положениях открытия дроссельной заслонки. В электронной таблице 320, например, хранящейся в CD-ROM (постоянном запоминающем устройстве на компакт-диске), содержится информация о рельефе местности, необходимая для компьютерного моделирования, т.е. по меньшей мере, например, градиенты или значения высот на маршруте над уровнем моря и любая информация, касающаяся ограничений скорости на маршруте. В компьютерном моделировании используются параметры 330, поступающие от измерителей и датчиков 360, согласно известной технологии. В их число входят по меньшей мере вес автомобиля или автопоезда, фактическая скорость автомобиля, передаточные отношения, коэффициенты полезного действия, число оборотов двигателя в минуту, положение открытия дроссельной заслонки (даже изменение положения открытия дроссельной заслонки), фактическое положение, уклон дороги (не из электронной таблицы), температура окружающего воздуха (которая влияет на топливовоздушную смесь), сопротивление движению и динамические характеристики двигателя. Сопротивление движению относится к величине, вычисляемой блоком управления в ответ на сигналы, отображающие фактический крутящий момент двигателя и фактические ускорение и массу автомобиля, и является показателем уклона дороги, попутного или встречного ветра и сопротивления-автомобиля качению. Кроме того, также может приниматься во внимание информация о скорости движущегося впереди автомобиля. В блоке 45 управления содержатся модели параметров двигателя, включая установившийся крутящий момент или крутящий момент, который способен стабильно обеспечивать двигатель при заданном рабочем режиме, т.е. без учета так называемых переходных значений до достижения рабочего режима. На основании необходимой информации блок 45 управления способен вычислять (моделировать на протяжении определенного заданного временного интервала) в числе прочего расход топлива, среднюю скорость и выбросы (как выхлоп, так и излучение шума) для набора различных передач, входящих в различные схемы переключений, путем решения уравнений, содержащие данные моделирования и временные инкременты. Путем сравнения вычисленного расхода топлива, средней скорости и выбросов или их сочетаний выбирается оптимальная схема переключений, на основании критерия, выбранного водителем, с использованием матриц, хранящихся в блоке 45 управления. Кроме того, позицией 350 на фиг.1 обозначена GPS, которая поддерживает связь с блоком управления также возможно посредством датчиков 360. В качестве выходного сигнала блока 45 управления передается решение 340, т.е. выбор передачи согласно выбранной схеме переключений.
В качестве альтернативы GPS и электронным таблицам может использоваться, например, указание маршрута.
Далее будут пояснены варианты осуществления настоящего изобретения на основании модели для прогнозирования, такой как, например, описанная выше. В проиллюстрированных вариантах осуществления могут моделироваться три различные последовательности переключения на более высокую передачу. В их число входят:
(i) 1+ одноступенчатая последовательность переключений под нагрузкой, когда прогнозируются два последовательных переключения под нагрузкой на более высокую передачу. На фиг.2, 3 и 5 она обозначена как переключение под нагрузкой (1, 1), при этом первая цифра в скобках означает первое переключение передачи, а вторая цифра означает очередное предстоящее переключение передачи;
(ii) традиционная одноступенчатая последовательность переключений на более высокую передачу без нагрузки (РСО-последовательность (1, 0) на фиг.2, 3 и 5), которая в основном применяется для переключения передач в определенном диапазоне (в ТДС, оснащенной, например, планетарной передачей), в котором при переключении конечной передачи диапазона невозможно переключение под нагрузкой,
(iii) традиционная двухступенчатая последовательность переключений на более высокую передачу без нагрузки (скачкообразное переключение ((2,0) на фиг.2, 3 и 5), которое может применяться во избежание переключения под нагрузкой в простых дорожных условиях и в условиях ускорения мощного автомобиля.
На основании различных описанных выше прогнозируемых переключений передач может быть оценено несколько интересующих параметров. В соответствии с изобретением наиболее важным параметром для стратегии скачкообразных переключений является расчетный временной интервал (Δt на чертежах) между двумя последовательными переключениями под нагрузкой, который определяют на основании последовательности (1,1) переключений под нагрузкой. Если расчетный временной интервал является меньшим, чем заданный предельный временной интервал (обычно 1 сек), что указывает на простые дорожные условия, блок 45 управления может быть запрограммирован на избегание переключения под нагрузкой последовательных передач. Вместо этого выбирается традиционное двухступенчатое переключение на более высокую передачу, т.е. скачкообразное переключение при условии, что эта последовательность является приемлемой последовательностью переключения передач. Последнее условие выполняется, если прогнозируется, что частота вращения двигателя после переключения превысит заданную предельную частоту вращения двигателя, после переключения произойдет соответствующее ускорение, и временной интервал до очередного традиционного переключения передача является достаточно большим.
С целью дополнительного пояснения стратегии скачкообразного переключения согласно изобретению на фиг.2 и 3 в виде диаграмм проиллюстрированы результаты двух различных сценариев прогноза. В обоих сценариях рассматривается случай полного открытия дроссельной заслонки в условиях слабо пересеченной местности. В приведенных примерах используется 12-скоростная ТДС (ТДС содержит 6-скоростную основную коробку передач и коробку передач с делителем, что обеспечивает 6х2 передач). В изобретении могут использоваться трансмиссии с несколькими сцеплениями с другими конфигурациями.
При проиллюстрированном (на фиг.2) первом состоянии автомобиля включенной передачей является 3-я передача, т.е. передача низкого диапазона, в котором посредством силового привода передается довольно высокий крутящий момент. Показано, что расчетный временной интервал Δt между двумя последовательными переключениями под нагрузкой на более высокую передачу составляет приблизительно 0,6 сек, что меньше, чем заданный предельный временной интервал, составляющий, например, 1 сек. Кроме того, с учетом нескольких упомянутых условий приемлемой последовательностью переключения является традиционное двухступенчатое переключение без нагрузки. Следовательно, в одном из вариантов осуществления изобретения вместо переключения под нагрузкой в качестве результата прогнозировании блок 45 управления запрограммирован на выполнение традиционного двухступенчатого переключения ((2,0) скачкообразного переключения), поскольку установлено, что прогнозируемый интервал Δt является меньшим, чем заданный предельный временной интервал.
В проиллюстрированном (на фиг.3) втором состоянии автомобиля включенной передачей является 8-я передача, т.е. передача высокого диапазона, в котором передаваемый посредством силового привода крутящий момент является не очень высоким. В этом случае расчетный временной интервал Δt между двумя последовательными переключениями под нагрузкой составляет приблизительно 3 сек, что превышает заданный предельный временной интервал. Хотя приемлемым переключением передач является традиционное двухступенчатое переключений без нагрузки (скачкообразное переключение (2,0)), блок управления в соответствии с изобретением запрограммирован выполнять переключение под нагрузкой (переключение под нагрузкой (1,1)).
В одном из дополнительных вариантов осуществления для прогнозирования или моделирования также могут использоваться всего две из трех упомянутых последовательностей переключения, а именно последовательности (1,1) переключения под нагрузкой и последовательности (2,0) скачкообразного переключения. Таким образом, стадия, на которой рассчитывается временной интервал At между двумя последовательными переключениями под нагрузкой на более высокую передачу является такой же, как и в предыдущем варианте осуществления.
Согласно одному из дополнительных вариантов осуществления изобретения соответствующее прогнозирование может использоваться применительно к переключениям на более низкую передачу. Например, если тяжело нагруженный автомобиль преодолевает крутой подъем, может возникнуть состояние, в котором ТДС приходится выполнять несколько быстрых переключений на более низкую передачу, чтобы адаптировать передаточное отношение к быстро снижающейся скорости автомобиля. Если согласно прогнозу расчетный временной интервал Δt между двумя последовательными переключениями под нагрузкой (не проиллюстрированное переключение под нагрузкой (-1, -1)) является меньшим, чем заданный предельный временной интервал, составляющий, например, 1 секунду, блок 45 управления может быть запрограммирован на выполнение традиционного двухступенчатого переключения на более низкую передачу (если это приемлемо). В этом случае также достигаются повышенная комфортность хода и уменьшенный износ сцепления.
В одном из дополнительных вариантов осуществления на основании расчетного временного интервала Δt между двумя последовательными переключениями под нагрузкой на более высокую передачу может быть реализована стратегия адаптивного скачкообразного переключения. Вкратце согласно этому варианту осуществления переключения передач изменяются таким образом, чтобы обеспечить приемлемый временной интервал между ними. Это может делаться блоком 45 управления, запрограммированным на моделирование. Очевидно, что переключения передач должны осуществляться в пределах диапазона максимальных крутящих моментов двигателя во избежание потери мощности. На фиг.4 проиллюстрирован один из примеров диапазона максимальных крутящих моментов для двигателя с узким диапазоном. Как показано на фиг.4, частота вращения двигателя и крутящий момент двигателя должны в основном находиться в пределах обозначенной области частоты вращения при переключении на более низкую передачу и частоты вращения при переключении на более высокую передачу (соответственно, верхнего и нижнего диапазонов).
С целью подробного пояснения стратегии адаптивного скачкообразного переключения рассмотрим случай переключения, проиллюстрированный на фиг.5, когда временной интервал Д1 между двумя последовательными переключениями под нагрузкой на более высокую передачу является коротким. Во-первых, при первом переключении на более высокую передачу частота вращения при переключении (Sпереключ1) может быть снижена до Sпереключ1 сниж. Это объясняется тем, что при переключении под нагрузкой частота вращения двигателя увеличивается, поскольку не происходит прерывания крутящего момента. Во-вторых, при втором переключении под нагрузкой частота вращения при переключении на более высокую передачу (Sпереключ2) может последовательно увеличиваться, пока не будет достигнут приемлемый временной интервал (Δtадапт) между двумя последовательными переключениями под нагрузкой на более высокую передачу. Приемлемый временной интервал достигается, когда частота вращения при переключении на более высокую передачу повышается до Sпереключ2 повыш. Таким образом, блок управления запрограммирован на выполнение упомянутого прогнозирования и выбор частот вращения при переключении, когда может быть достигнут приемлемый временной интервал между двумя последовательными переключениями под нагрузкой на более высокую передачу. Тем не менее, если блок управления прогнозирует, что частота вращения при переключении на более высокую передачу превысит частоту вращения с максимальной производительностью, заданную кривой максимальных крутящих моментов двигателя (см., например, фиг.4), а временной интервал между переключениями станет еще меньшим, чем заданный предельный временной интервал (обычно 1 сек), блок 45 управления запрограммирован на выполнение традиционного двухступенчатого переключения передач, т.е. скачкообразного переключения. Преимуществом этого варианта осуществления является то, что при увеличении временного интервала между двумя последовательными переключениями под нагрузкой на более высокую передачу в основном повышается комфортность хода.
В варианте осуществления, проиллюстрированном на фиг.4 и 5, для прогнозирования или моделирования также могут использоваться всего две из трех упомянутых последовательностей переключения, а именно последовательности (1,1) переключения под нагрузкой и последовательности (2,0) скачкообразного переключения.
Кроме того, в варианте осуществления, проиллюстрированном на фиг.4 и 5, также могут соответствующим образом прогнозироваться переключения на более низкую передачу. Так, в данном случае первое переключение на более низкую передачу осуществляют раньше, то есть частота вращения при переключении повышается, а второе переключение на более низкую передачу может осуществляться позже, то есть частота вращения при переключении снижается.
В одном из дополнительных вариантов осуществления блок 45 управления может быть запрограммирован на применение сначала стратегии, описанной со ссылкой на фиг.5, если временной интервал Δt между двумя последовательными переключениями под нагрузкой на более высокую передачу невозможно адаптировать, блок 45 управления может быть запрограммирован на прогнозирование и управление согласно варианту осуществления, описанному со ссылкой на фиг.2 и 3.
В проиллюстрированных вариантах осуществления описано только традиционное двухступенчатое переключение на более высокую передачу без нагрузки ((2,0) скачкообразное переключение). В дополнительных вариантах осуществления также могут моделироваться или прогнозироваться другие скачкообразные переключения, например трех-, четырех- или более ступенчатое скачкообразное переключение.
На фиг.6 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как блок 45 управления. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления функцией выбора заданной передачи согласно изобретению. В одном из альтернативных вариантов осуществления в отдельной энергонезависимой запоминающей среде (средстве) 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками, хранится программа управления трансмиссией с несколькими сцеплениями. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.



Изобретение относится к способу и системе управления трансмиссией с двойным сцеплением. Способ управления включает стадии: использования блока управления для управления двигателем внутреннего сгорания и трансмиссией; использования модели для прогнозирования, содержащей одну смоделированную последовательность переключений трансмиссии; прогнозирования временного интервала (Δt) между первым и вторым переключениями трансмиссии под нагрузкой на более высокую передачу или между первым и вторым переключениями трансмиссии под нагрузкой на более низкую передачу на основании одной модели для прогнозирования; изменения одного параметра управления трансмиссией, если прогнозируемый временной интервал между первым и вторым переключениями трансмиссии под нагрузкой на более высокую/низкую передачу является меньшим, чем заданный предельный временной интервал. Система управления содержит блок управления трансмиссией. Блок управления запрограмирован на выполнение вышеуказанного способа. Достигается повышение комфортности управления. 2 н. и 8 з.п. ф-лы, 6 ил.
1. Способ управления трансмиссией с несколькими сцеплениями, которая может соединяться с возможностью передачи приводного усилия с первичным двигателем, установленным на транспортном средстве для сообщения ему движения, включающий:
использование блока (45) управления для управления по меньшей мере первичным двигателем и трансмиссией,
использование модели для прогнозирования, содержащей по меньшей мере одну смоделированную последовательность переключений трансмиссии,
прогнозирование временного интервала (Δt, Δtадапт) между первым и вторым переключениями трансмиссии под нагрузкой на более высокую передачу или между первым и вторым переключениями трансмиссии под нагрузкой на более низкую передачу на основании по меньшей мере одной модели для прогнозирования,
изменение по меньшей мере одного параметра управления трансмиссией, если прогнозируемый временной интервал между первым и вторым переключениями трансмиссии под нагрузкой на более высокую/низкую передачу меньше, чем заданный предельный временной интервал, при этом параметром управления трансмиссией является первая предельная частота вращения при первом переключении под нагрузкой на более высокую/низкую передачу и/или вторая предельная частота вращения при втором переключении под нагрузкой на более высокую/низкую передачу,
отличающийся тем, что упомянутый параметр управления трансмиссией изменяют путем выполнения по меньшей мере одной из следующих операций:
снижение первой предельной частоты (Sпереключ1 сниж) вращения при переключении,
повышение второй предельной частоты (Sпереключ2 повыш) вращения при переключении,
причем упомянутые предельные частоты вращения могут быть изменены в максимальной степени только при условии, что крутящий момент первичного двигателя остается в диапазоне его максимальных крутящих моментов.
2. Способ по п.1, в котором выбирают две или более ступеней обычного переключения на более высокую/низкую передачу, если прогнозируемый временной интервал превышает заданный временной интервал даже после того, как предельные частоты вращения при переключении передач были изменены в максимальной степени.
3. Способ по п.1, дополнительно включающий стадию передачи блоку управления информации о частоте вращения двигателя, скорости транспортного средства, положении педали акселератора и дорожных условиях.
4. Способ по п.1, в котором заданный предельный временной интервал составляет менее 1 секунды.
5. Способ по п.1, в котором прогнозирование временного интервала между первым и вторым переключениями на более высокую/низкую передачу выполняют посредством блока управления путем моделирования в реальном времени.
6. Способ по п.1, в котором первое и второе переключения под нагрузкой на более высокую/низкую передачу представляют собой последовательные переключения под нагрузкой.
7. Способ по п.1, в котором параметром управления трансмиссией являются по меньшей мере две последовательности переключения.
8. Способ по п.7, в котором по меньшей мере две последовательности переключения представляют собой одно из следующего:
последовательное переключение под нагрузкой на более высокую передачу и две или более ступеней обычного переключения на более высокую передачу,
последовательное переключение под нагрузкой на более низкую передачу и две или более ступеней обычного переключения на более низкую передачу.
9. Способ по п.8, в котором выбирают две или более ступеней обычного переключения на более высокую/низкую передачу, если прогнозируемый временной интервал между первым и вторым переключениями под нагрузкой на более высокую передачу или между первым и вторым переключениями под нагрузкой на более низкую передачу меньше, чем заданный временной интервал.
10. Система управления трансмиссией, содержащая блок (45) управления, обеспечивающий управление трансмиссией с несколькими сцеплениями, отличающаяся тем, что блок управления запрограммирован на выполнение способа по п.1.
| DE 102005028551 A1, 04.01.2007 | |||
| US 2009210122 A1, 20.08.2009 | |||
| RU 2063887 C1, 20.07.1996 | |||
| Способ автоматического управления переключением передач ступенчатой трансмиссии транспортного средства | 1982 |
|
SU1445551A3 |

