Область техники, к которой относится изобретения
Настоящее изобретение относится к способу автоматического определения изменения дорожных условий для наземного транспортного средства (называемого далее "автомобиль").
Предпосылки создания изобретения
В автомобилях большой грузоподъемности все чаще используют автоматические трансмиссии типа автоматических механических трансмиссий (АМТ), что стало возможным с развитием микропроцессорной технологии, позволяющей с помощью управляющего компьютера и нескольких элементов 30 управления, например сервоприводов, с высокой точностью регулировать число оборотов двигателя, взаимное соединение и разъединение автоматического сцепления между двигателем и коробкой передач и соединительными элементами коробки передач, за счет чего всегда обеспечивается плавное переключение передачи на правильную частоту вращения. Преимуществом автоматической коробки передач данного типа над традиционной автоматической коробкой передач на основе набора планетарных зубчатых колес и с гидродинамическим трансформатором на первичной стороне является, во-первых, ее простота и более высокая надежность и возможность изготовления со значительно меньшими затратами, в особенности, что касается применения в автомобилях большой грузоподъемности, и, во-вторых, более высокий кпд, что означает меньший расход топлива.
Автоматические механические трансмиссии упомянутого выше типа в значительной мере облегчают переключение передач, и водителю не стоит беспокоиться о правильном выборе очередного передаточного отношения в процессе управления автомобилем. Все это предусмотрено в автоматических механических трансмиссиях. Эти известные системы автоматических механических трансмиссий часто имеют высокооптимизированную функцию для движения по дороге (так называемых магистральных перевозок и перевозок на дальние расстояния). В этих случаях прилагаются значительные усилия, чтобы максимально увеличить среднюю скорость автомобиля или свести к минимуму расход топлива.
Когда эти оптимизированные для движения по дороге автомобили пытаются эксплуатировать вне дорог, их функционирование в таких условиях является неудовлетворительным. Вести автомобиль в условиях бездорожья необходимо осторожно, но также с достаточной тяговой мощностью, чтобы иметь возможность справляться со значительными изменениями сопротивления тяге (т.е., например, ухабами, рытвинами, лужами грязи).
В патенте US 4569255 описано устройство с автоматической механической трансмиссией, позволяющее водителю с помощью переключателя передач выбирать положение "работы с высоким сопротивлением", т.е. вне дорог. В этом случае коробка передач переключается на передачу, адаптированную к условиям бездорожья. Описание упомянутого патента в порядке ссылки включено в настоящее описание.
Задачей настоящего изобретения является еще большее упрощение управления автомобилем, оснащенным автоматической механической трансмиссией, например, в ситуации движения по дороге, а затем в условиях бездорожья и снова по дороге.
Краткое изложение сущности изобретения
В изобретении предложен способ определения дорожных условий в процессе управления транспортным средством (автомобилем).
Такой автомобиль включает (без ограничения) двигатель для приведения в действие по меньшей мере одного его колеса посредством полностью автоматической или полуавтоматической трансмиссии, по меньшей мере один блок управления для приема входных сигналов и обработки упомянутых сигналов в соответствии с запрограммированными логическими правилами с целью передачи трансмиссии выходных командных сигналов переключения передачи, при этом в случае приема сигнала, отображающего присутствие первых дорожных условий, блок управления способен за счет программирования изменять стратегию переключения передач упомянутой трансмиссии на стратегию переключения передач, оптимизированную для первых дорожных условий, если текущей стратегией переключения передач является вторая стратегия переключения передач для вторых дорожных условий, которые отличаются от первых дорожных условий.
Преимуществом предложенного в изобретении способа является то, что водитель может продолжать вождение, не предпринимая ничего особенного при переходе автомобиля из одних дорожных условий в другие. В предложенном в изобретении способе автомобиль при необходимости автоматически изменяет стратегию переключения передач.
В одном из вариантов осуществления предложенного в изобретении способа блок управления запрограммирован осуществлять изменение, если обнаружено, что перемещение автомобиля, когда он находится в первых дорожных условиях, сходно с первой заданной моделью преимущественно вертикального перемещения автомобиля.
В одном из дополнительных вариантов осуществления предложенного в изобретении способа упомянутый сигнал, отображающий дорожные условия, включает по меньшей мере сигнал, генерированный датчиком, измеряющим перемещение кабины водителя автомобиля относительно кузова автомобиля.
В одном из дополнительных вариантов осуществления предложенного в изобретении способа упомянутый сигнал, отображающий дорожные условия, включает по меньшей мере сигнал, генерированный датчиком, измеряющим вибрацию автомобиля.
В еще одном из дополнительных вариантов осуществления предложенного в изобретении способа упомянутый блок управления запрограммирован осуществлять изменение при обнаружении превышения заданного эталонного значения вибрации автомобиля.
В другом варианте осуществления предложенного в изобретении способа блок управления запрограммирован осуществлять изменение при обнаружении происходящих с течением времени скачкообразных изменений ускорения, частоты, длины волны и(или) амплитуды вертикального перемещения автомобиля или его деталей. В различных вариантах осуществления упомянутой деталью автомобиля может являться колесо, кузов или кабина водителя. Перемещение колес относительно кузова является основным параметром при оценке типа дорожных условий, в которых в данный момент находится автомобиль.
В одном из вариантов осуществления предложенного в изобретении способа автомобиль дополнительно включает по меньшей мере две колесные пары. Данный вариант осуществления отличается тем, что при определении необходимости изменения стратегии переключения передач сравнивают и учитывают перемещение различных колес в различных колесных парах. Это является простым способом обнаруживать, например, много ли на дороге ухабов или рытвин.
В одном из дополнительных вариантов осуществления предложенного в изобретении способа при определении необходимости изменения стратегии переключения передач блок управления использует сигналы датчика вибраций для измерения вибраций в кузове. Известно, что вибрации в кузове усиливаются, когда автомобиль движется по бездорожью. Тем самым, это является еще одним способом определять, изменились ли дорожные условия. Сочетание регистрации перемещений различных деталей автомобиля (указанных выше) и измерения вибраций в кузове дополнительно способствует эффективному определению момента для изменения стратегии переключения передач.
Краткое описание чертежей
Далее настоящее изобретение более подробно описано со ссылкой на приложенный чертеж, на котором в качестве примера показан предпочтительный вариант осуществления изобретения.
Описание изобретения
В одном из вариантов осуществления автомобиль имеет двигатель 1 внутреннего сгорания, например, дизельный двигатель с коленчатым валом 2, который связан с "сухим" однодисковым сцеплением 3, которое помещается в картере 4 сцепления. Коленчатый вал 2 неповоротно соединен со свободно вращающимся входным валом 7, который установлен в картере 8 коробки 9 передач. В картере 8 коробки передач также установлены свободно вращающиеся вторичный вал 10 и контрвал 11. На входном валу установлено свободно вращающееся зубчатое колесо, которое может быть зафиксировано на валу с помощью синхронизирующего устройства с соединительной муфтой, неповоротно, но с возможностью осевого перемещения установленного на ступице, неповоротно соединенной с выходным валом. С помощью соединительной муфты свободно вращающееся зубчатое колесо, установленное на вторичном валу, может быть зафиксировано относительно входного вала 7. Когда соединительная муфта находится в среднем положении, оба зубчатых колеса выведены из зацепления с соответствующими валами. Упомянутые зубчатые колеса вместе с синхронизирующим устройством и соединительной муфтой образуют разъемное зубчатое колесо.
На контрвалу 11 надежно закреплены свободно вращающиеся дополнительные зубчатые колеса, каждое из которых входит в зацепление с соответствующим свободно вращающимся зубчатым колесом, установленным на вторичном валу 10, при этом упомянутые зубчатые колеса могут быть зафиксированы на вторичном валу с помощью дополнительных соединительных муфт. Вторичная сторона вторичного вала 10 посредством карданного вала передает привод на колесную пару.
Все соединительные муфты способны перемещаться с помощью сервоэлементов, которыми могут являться устройства типа поршневых цилиндров с пневмоприводом, используемых в коробке передач описанного выше типа, предлагаемой на рынке под торговым наименованием I-SHIFT.
Для управления различными поршневыми цилиндрами с пневмоприводом, обеспечивающими различные передаточные отношения между входным валом 7 и выходным валом трансмиссии, используют блок 45 управления. Блок 45 управления запрограммирован на две различные стратегии переключения передач, одна из которых оптимизирована для движения по дороге, а другая -для движения по бездорожью. В отличие от стратегии переключения передач при движении по дороге, стратегия переключения передач при движении по бездорожью не оптимизирована для обеспечения максимально низкого расхода топлива или максимально возможной скорости движения автомобиля. Вместо этого предпочтение отдано увеличенным допускам, например, в виде увеличенных резервов тяговой мощности наряду со сведением к минимуму числа переключений передач.
Автомобиль дополнительно оснащен системой 55 подвески колес 56. В качестве системы подвески может предпочтительно использоваться механическая пружинная подвеска или пневматическая подвеска, в обоих случаях в сочетании с системой амортизации, которая может включать гидравлические или пневматические телескопические амортизаторы. В качестве механических пружин могут использоваться, например, пластинчатые пружины (как показано на чертеже) или спиральные пружины.
Перемещение колес относительно кузова 57 может быть измерено с помощью датчиков 58 для измерения вертикального перемещения колес. Этими датчиками могут быть датчики тяги управления, такие как потенциометр 59 крутящего момента, который может быть установлен на раме или кузове 57 автомобиля. Как передние, так и задние колеса автомобиля могут быть снабжены датчиком, а блок 45 управления рассчитан на прием информации о вертикальном перемещении различных колес.
В одном из вариантов осуществления в каком-либо месте на кузове может быть установлен датчик 60 вибраций для измерения вибраций в кузове.
Блок 45 управления рассчитан на прием сигналов датчика 60 вибраций.
Датчиком 60 вибраций может являться акселерометр, в котором для выдачи сигналов используется пьезоэлектрический материал, хотя для измерений вибраций могут использоваться датчики и материалы других типов.
Крутящий момент, передаваемый двигателем 1, известным способом регулируют с помощью регулятора 48 газа (обычно педали акселератора). Положение педали акселератора определяют с помощью углового датчика 49. Блок 45 управления также регулирует впрыск топлива (т.е. число оборотов и крутящий момент двигателя посредством блока 5 управления двигателем) в зависимости от положения педали акселератора и подачу воздуха в пневматические поршневые цилиндры, с помощью которых, например, управляют сцеплением и синхронизированным разъемным зубчатым колесом. Блок 45 управления принимает решения о выборе передачи и переключении на основании определенных измеренных и(или) вычисленных параметров, таких как скорость движения автомобиля, число оборотов двигателя, быстрота изменения скорости движения автомобиля, быстрота изменения числа оборотов двигателя, положение регулятора газа, быстрота изменения положения регулятора газа, приведение в действие тормозного механизма, текущее выбранное передаточное отношение и т.п., которые известны из уровня техники.
В одном из вариантов осуществления блок 45 управления запрограммирован регистрировать вертикальное перемещение колес с течением времени, а в случае резкого изменения ускорения, частоты, длины волны и(или) амплитуды вертикального перемещения колес с течением времени блок 45 управления расценивает его как изменение дорожных условий.
Как только блок 45 управления изменит стратегию переключения передач, характеристики трансмиссии будут оптимизированы для новых дорожных условий.
В другом варианте осуществления изобретения при изменении вертикального перемещения колес согласно заданной модели блок 45 управления расценивает его как изменение дорожных условий и соответствующим образом изменяет стратегию переключения передач. Заданная модель предпочтительно хранится в памяти блока 45 управления.
В дополнительном усовершенствованном варианте осуществления изобретения (не показанном) блок 45 управления запрограммирован сравнивать перемещение одного или двух передних колес относительно соответствующих задних колес автомобиля. Когда, например, одно из передних колес сначала попадает в ухаб, а затем через определенное время заднее колесо с той же стороны автомобиля попадает в тот же ухаб, перемещения регистрируют и сравнивают друг с другом. Если количество зарегистрированных ухабов и рытвин превышает определенное заданное число, это указывает на изменение дорожных условий, и блок управления немедленно соответствующим образом изменяет стратегию переключения передач. Заданное число предпочтительно хранится в памяти блока 45 управления. Передними и задними колеса являются колеса, расположенные в передней и задней части автомобиля, соответственно. Передними и задними колеса также могут являться передние и задние колеса, например, автомобиля с тележечной конфигурацией колес.
В другом дополнительном усовершенствованном варианте осуществления изобретения блок 45 управления запрограммирован регистрировать сигналы датчика 60 вибраций. При изменении частоты и(или) амплитуды вибрации блок 45 управления расценивает его как изменение дорожных условий и соответствующим образом изменяет стратегию переключения передач. Заданные эталонные значения частот и амплитуд предпочтительно хранятся в памяти блока 45 управления. Например, для ровной и горизонтальной дороги в хорошем состоянии могут быть сохранены эталонные значения, соответствующие небольшим пульсациям вибрации, т.е. вибрациям с малыми амплитудами и высокими частотами. Соответствующие эталонные значения для бездорожья включают множество различных частот и значительно более высоких амплитуд. Блок 45 управления может быть запрограммирован непрерывно сравнивать эталонные значения с текущими дорожными условиями. Эталонными значениями могут являться одно среднее значение частоты и одно среднее значение амплитуды, которые могут отображать, например, разнообразные условия, считающиеся бездорожьем. Если текущими дорожными условиями являются условия движения по дороге, блок 45 управления осуществляет стратегию переключения передач, оптимизированную для таких условий движения по дороге, и осуществляет постоянное сравнение с эталонными значениями вибрации для условий движения по бездорожью. Если блок 45 управления посредством датчика 60 вибраций зарегистрирует вибрации с большим разнообразием частот и более высокими амплитудами, чем эталонные значения для бездорожья, блок 45 управления расценивает это как изменение дорожных условий и соответствующим образом изменяет стратегию переключения передач. Помимо условий движения по дороге и бездорожью, может использоваться другое классифицирование дорожных условий. Например, возможно можно установить несколько различных уровней качества дорожных условий, начиная с уровня, соответствующего взлетно-посадочной полосе и заканчивая уровнем, соответствующим пашне.
В другом дополнительном усовершенствованном варианте осуществления изобретения блок 45 управления запрограммирован регистрировать вертикальные перемещения кабины водителя (не показана) автомобиля относительно кузова автомобиля. В предпочтительном варианте осуществления кабина водителя оснащена системой подвески, повышающей плавность хода. Как и в упомянутых выше вариантах осуществления, блок 45 управления может быть запрограммирован обнаруживать происходящие с течением времени изменения ускорения, частоты, длины волны и(или) амплитуды перемещения кабины водителя. Блок 45 управления может быть запрограммирован расценивать это изменение как изменение дорожных условий. В дополнительно варианте осуществления изобретения изменение дорожных условий может быть зарегистрировано путем сравнения заданных моделей перемещения кабины водителя при различных дорожных условиях с обнаруженными текущими дорожными условиями. Если блок управления обнаружит, что текущие перемещения кабины водителя сходны с одной из заданных моделей, которая не соответствует текущей стратегии переключения передач, он регистрирует изменение дорожных условий и осуществляет изменение стратегии переключения передач в соответствии с новыми дорожными условиями.
В показанном на чертеже варианте осуществления используют как датчик 60 вибраций, так и датчик 58 перемещения колес. Возможны варианты осуществления изобретения с использованием только одного из упомянутых выше способов обнаружения перемещений автомобиля или его деталей автомобиля (таких как колеса) для определения дорожных условий или сочетания двух или более из упомянутых выше способов. При использовании нескольких способов можно получить более надежный сигнал, отображающий, какие дорожные условия являются преобладающими.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и в него может быть внесен ряд дополнительных подробностей и усовершенствований, входящих в объем притязаний, определяемый следующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫБОРА ПЕРЕДАЧИ ВО ВРЕМЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ В ТЯЖЕЛЫХ УСЛОВИЯХ ДВИЖЕНИЯ В ГОРУ | 2005 |
|
RU2426927C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2488729C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ С НЕСКОЛЬКИМИ СЦЕПЛЕНИЯМИ | 2009 |
|
RU2526332C2 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОЙ ДВИЖУЩЕЙ СИЛЫ АВТОМОБИЛЯ | 2010 |
|
RU2540361C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ИЛИ ПОЛУАВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ В РЕЖИМЕ ХОЛОСТОГО ХОДА | 2007 |
|
RU2422706C2 |
| ДВИЖИТЕЛЬ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2229406C2 |
| Способ и устройство управления автомобилем | 2018 |
|
RU2742445C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2010 |
|
RU2528470C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2574043C2 |
Изобретение относится к способу автоматического определения изменения дорожных условий для наземного транспорта. Транспортное средство содержит двигатель (1), выходной вал которого посредством сцепления соединен с полностью автоматической или полуавтоматической трансмиссией (9). Транспортное средство дополнительно включает систему (55) подвески с датчиками (58) для измерения вертикального перемещения колес автомобиля относительно кузова (57) автомобиля и по меньшей мере один блок (45) управления, рассчитанный на прием разнообразных входных сигналов и обработку этих сигналов в соответствии с запрограммированными логическими правилами с целью передачи выходных командных сигналов запроса крутящего момента двигателю и команд переключения передачи трансмиссии и сцеплению. Блок (45) управления запрограммирован изменять стратегию переключения передач трансмиссии на стратегию переключения передач, оптимизированную для первых дорожных условий, если текущей стратегией переключения передач является вторая стратегия переключения передач для вторых дорожных условий. Изобретение позволяет упростить управление транспортным средством, оснащенным автоматической механической трансмиссией, например, при движении по дороге, затем в условиях бездорожья и снова по дороге. 7 з.п. ф-лы, 1 ил.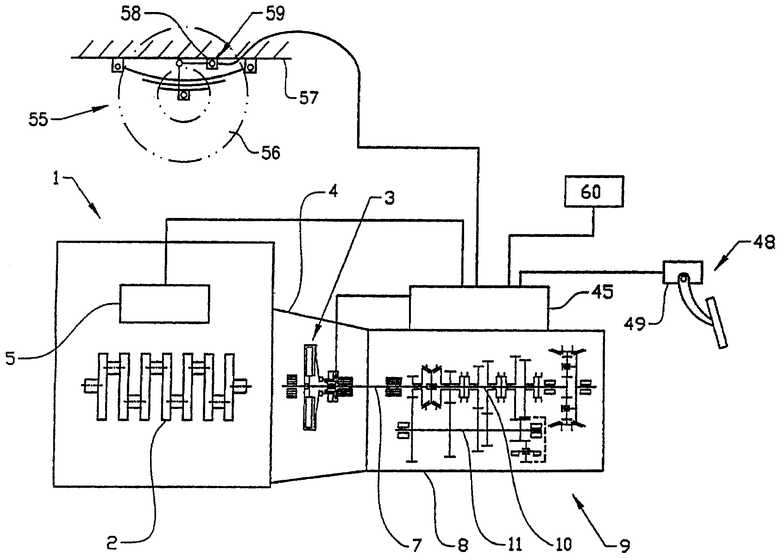
1. Способ определения дорожных условий в процессе управления транспортным средством, включающим двигатель (1) для приведения в действие по меньшей мере одного колеса транспортного средства посредством полностью автоматической или полуавтоматической трансмиссии (9), по меньшей мере один блок (45) управления для приема входных сигналов и обработки этих сигналов в соответствии с запрограммированными логическими правилами с целью передачи трансмиссии (9) выходных командных сигналов переключения передачи, при этом блок (45) управления запрограммирован, в случае приема сигнала, отображающего присутствие первых дорожных условий, изменять стратегию переключения передач упомянутой трансмиссии (9) на стратегию переключения передач, оптимизированную для этих первых дорожных условий, если текущей стратегией переключения передач является вторая стратегия переключения передач для вторых дорожных условий, которые отличаются от первых дорожных условий, отличающийся тем, что используют блок (45) управления, запрограммированный осуществлять изменение, когда датчик, установленный на транспортном средстве, обнаруживает происходящее в динамике по времени резкое изменение ускорения, частоты, длины волны и(или) амплитуды вертикальных перемещений транспортного средства или его деталей.
2. Способ по п.1, отличающийся тем, что блок (45) управления запрограммирован осуществлять изменение, если обнаружено, что первая заданная модель преимущественно вертикального перемещения транспортного средства сходна с его перемещениями, когда оно находится в первых дорожных условиях.
3. Способ по п.1, отличающийся тем, что упомянутый сигнал, отображающий дорожные условия, включает по меньшей мере сигнал, генерированный датчиком, измеряющим перемещение кабины водителя относительно кузова.
4. Способ по п.1, отличающийся тем, что упомянутый сигнал, отображающий дорожные условия, включает по меньшей мере сигнал, генерированный датчиком (60), измеряющим вибрации в транспортном средстве.
5. Способ по п.4, отличающийся тем, что блок (45) управления запрограммирован осуществлять изменение, если обнаружено превышение заданного эталонного значения вибрации транспортного средства.
6. Способ по п.1, отличающийся тем, что упомянутой деталью транспортного средства является по меньшей мере одно колесо (56), способное перемещаться по меньшей мере вертикально относительно кузова.
7. Способ по п.6, отличающийся тем, что транспортное средство имеет по меньшей мере две колесные пары, и при определении, изменились ли дорожные условия, также сравнивают и учитывают преимущественно вертикальные перемещения различных колес в различных колесных парах.
8. Способ по любому из предшествующих пунктов, отличающийся тем, что первыми дорожными условиями являются условия движения по бездорожью, а вторыми дорожными условиями являются условия движения по дороге.
| US 5911771 А, 15.06.1999 | |||
| US 6626797 В2, 30.09.2003 | |||
| US 6834224 B2, 21.12.2004 | |||
| Система управления автоматической трансмиссией транспортного средства | 1989 |
|
SU1731661A1 |

