Акселерометр предназначен для измерения линейных ускорений. Изобретение может найти применение в качестве чувствительного элемента в системах стабилизации, наведения и навигации, а также в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (патент РФ №2098833, кл. G01P 15/13, опубл. 10.12.97 г.), содержащее чувствительный элемент, включающий в себя два неподвижных электрода и подвижную пластину, три усилителя, два резистора, а вход второго усилителя соединен со вторым резистором и является выходом устройства. Для повышения помехоустойчивости при воздействии электрических помех в него введен источник опорного напряжения, генератор электрического сигнала, две транзисторные пары, три резистора, два конденсатора, позволяющих за счет охвата усилителей отрицательной обратной связью, осуществить компенсацию электрических помех.
Недостатком данного устройства является низкая точность измерения, так как выбор коэффициента усиления в жесткой отрицательной обратной связи ограничен условием устойчивости системы.
Наиболее близким по техническому решению является устройство (описанное в АС №742801, опубл. в БИ №23, 1980), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент. Причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент и дополнительный интегрирующий усилитель подключен к управляющему входу электронного ключа.
Недостатком акселерометра является малая полоса пропускания, обусловленная работой интегрирующих аналоговых усилителей и порогового элемента. Кроме того, полоса пропускания зависит от параметров схемы электронного ключа, осуществляющего выборку информации. Акселерометр имеет погрешность измерения, обусловленную конечностью времени заряда конденсатора интегрирующего усилителя. Эта погрешность приводит к апертурной ошибке, свойственной подобной схеме выборки и обработки информации. Малая полоса пропускания акселерометра, невысокое быстродействие и малый коэффициент усиления по разомкнутому контуру, определяют точность в установившемся режиме.
Технической задачей настоящего изобретения является расширение полосы пропускания акселерометра и повышение точности измерения.
Это достигается за счет того, что в акселерометр, содержащий чувствительный элемент, отклонение которого фиксируется датчиком угла, датчик момента, включенный в отрицательную обратную связь, введены две отрицательные интегрирующие обратные связи, одна с выхода датчика угла на один из входов датчика момента одновременно через усилитель обратной связи и первый интегратор, другая, отрицательная интегрирующая обратная связь, реализована с выхода датчика угла на другой вход датчика момента последовательно по информационным входам через усилитель, фильтр, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, второй интегратор, триггер, и электронный ключ. Причем, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика соединены с выходом генератора вспомогательной частоты. Вход схемы сравнения соединен с выходом генератора вспомогательной частоты через суммирующий двоичный счетчик. Вход электронного ключа соединен с выходом генератора тока. Выход с реверсивного двоичного счетчика является цифровым кодом акселерометра.
Введение двух отрицательных интегрирующих обратных связей, одна из которых стабилизирующая обратная связь, с выхода датчика угла на один из входов датчика момента через усилитель обратной связи и первый интегратор, другая - с выхода датчика угла на вход датчика момента через последовательно соединенные по информационным входам усилитель, фильтр, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, второй интегратор, триггер, электронный ключ позволяют создать акселерометр, работающий в режиме автоколебаний с расширенной полосой пропускания и значительным быстродействием.
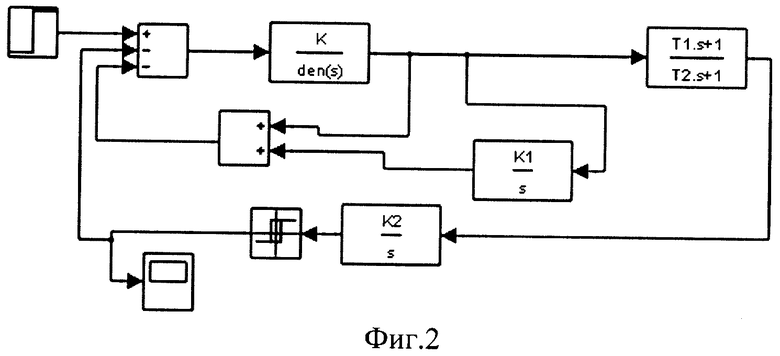
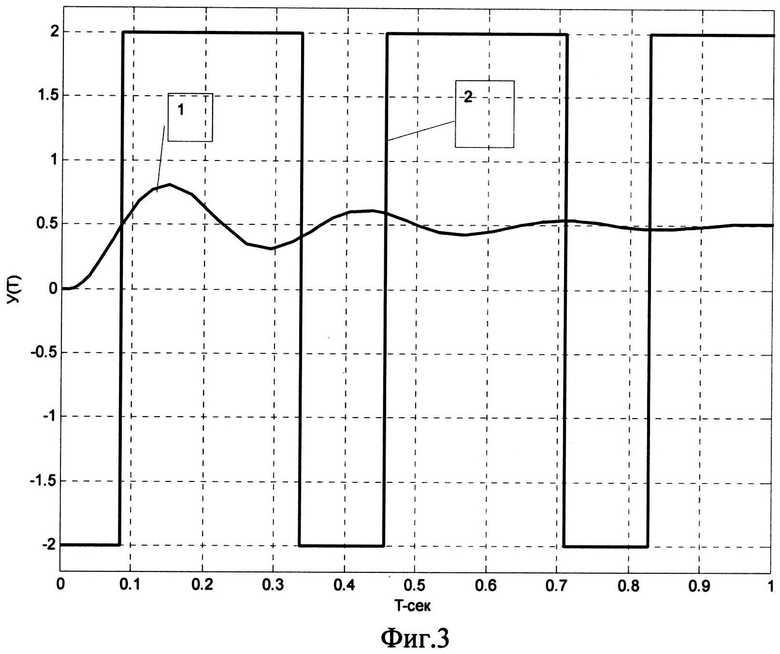
На фиг.1 изображена функциональная схема акселерометра, на фиг.2 - схема моделирования, на фиг.3 - результаты моделирования прототипа и предлагаемого устройства.
Акселерометр содержит чувствительный элемент 1, угловое отклонение которого фиксирует датчик угла 2. Выход датчика угла 2 соединен с входами усилителя обратной связи 3, первого интегратора 4, и с усилителем 5. Выход усилителя 5 соединен с входом фильтра 6. Выход фильтра 6 соединен с входом компаратора 7. Выход компаратора 7 соединен с входом преобразователя уровня 8, выходы которого соединены с входами пары ждущих синхронных генераторов (ЖСГ) 9 и 10. Выходы ЖСГ 9 и 10 соединены с входами реверсивного двоичного счетчика 11. Выход реверсивного двоичного счетчика 11 соединен с входом схемы сравнения 12. Другой вход схемы сравнения 12 соединен с выходом суммирующего двоичного счетчика 13. Выход схемы сравнения 12 соединен с входом второго интегратора 14. Выход второго интегратора 14 соединен с входом триггера 15, выход которого соединен с входом электронного ключа 16, другой вход электронного ключа 16 соединен с выходом генератора тока 17. Выход электронного ключа 16 соединен с одним из входов датчика момента 18, другие входы датчика момента 18 соединены с выходом усилителя обратной связи 3 и с выходом первого интегратора 4. Дополнительные входы компаратора 7, ЖСГ 9 и 10, реверсивного двоичного счетчика 11 соединены с выходом генератора вспомогательной частоты 19. Вход схемы сравнения 12 соединен с выходом генератора вспомогательной частоты 19 через суммирующий двоичный счетчик 13.
Внутреннее содержание интеграторов, усилителя, компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика, схемы сравнения, порогового элемента, триггера, суммирующего двоичного счетчика, преобразователя уровня, интеграторов, фильтра приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т 1-3, 1993.
Акселерометр работает следующим образом. При действии ускорения W на чувствительный элемент 1, выполненный в виде маятника, действует инерционный момент равный m·l·W (где m, l - масса и длинна маятника). Под действием этого момента происходит отклонение чувствительного элемента 1, которое фиксируется датчиком угла 2. Выходной сигнал с датчика угла 2, в виде напряжения, поступает как на вход усилителя обратной связи 3, так и на вход первого интегратора 4. Выходные сигналы с усилителя обратной связи 3 и первого интегратора 4, после преобразования в ток, поступают на один из входов датчика момента 18. Элементы, входящие в структуру акселерометра, 2, 3, 4, 18, образуют первую интегрирующую отрицательную обратную связь. Сигнал с датчика угла 2 поступает также на вход усилителя 5, а затем в виде напряжения на вход фильтра 6. Сигнал с выхода фильтра 6, в виде напряжения, поступает на вход компаратора 7. В компараторе 7 происходит сравнение сигнала с выхода фильтра 6 с сигналом, выделенного стабильного по частоте и амплитуде сигнала с выхода генератора вспомогательной частоты 19. Если сигнал с выхода фильтра 6 будет больше треугольного напряжения с выхода генератора вспомогательной частоты 19, то на выходе компаратора 7 будет высокий логический уровень, если меньше, то на выходе компаратора 7 - низкий логический уровень. Уровень сигнала с выхода компаратора 7 зависит от фазы отклонения чувствительного элемента 1. Сигнал с выхода компаратора 7, в виде уровня, поступают на вход преобразователя уровня 8, а затем на входы ждущих синхронных генераторов 9 и 10, которые, с помощью генератора вспомогательной частоты 19, выдают сигналы в виде импульса, на каждое воздействие входного сигнала (с выхода преобразователя уровня 8), равного "1". Реверсивный двоичный счетчик 11, по сигналу с генератора вспомогательной частоты 19, производит подсчет единичных импульсов поступающих с выхода ждущего синхронного генератора 9 и вычитание импульсов, поступающих с выхода ждущего синхронного генератора 10. Реверсивный двоичный счетчик 11 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде, и преобразование дополнительного кода осуществляется схемой сравнения 12 и суммирующим двоичным счетчиком 13. После логического сравнения сигналов в схеме сравнения 12, сигнал с выхода 12 поступает на вход второго интегратора 14, а затем на вход триггера 15. Сигнал, в виде уровня, с триггера 15 поступает на вход электронного ключа 16. Стабилизацию параметров электронного ключа 16 осуществляет генератор тока 17. На выходе электронного ключа 16 будут импульсы, число которых пропорционально двоичному коду, поступающему на вход схемы сравнения 12. На вход датчика момента 18 поступает сигналы с выходов усилителя обратной связи 3 и первого интегратора 4, также с выхода электронного ключа 16. Сигнал, поступающий на обмотку датчика момента 18, будет со знаком знакового разряда реверсивного двоичного счетчика 11. Выход реверсивного двоичного счетчика 11 является выходом цифрового кода акселерометра. Первая отрицательная интегрирующая обратная связь, содержащая усилитель обратной связи 3 первый интегратор 4 и датчик момента 18, осуществляет стабилизацию параметров акселерометра. Вторая интегрирующая отрицательная обратная связь, образованная элементами 2, 5, 6, 7, 8, 9, 10, 11, 12, 15, 16 и 18, осуществляет расширение полосы пропускания и повышение точности.
Введение в акселерометр двух интегрирующих отрицательных обратных связей с выхода датчика угла на вход датчика момента позволяет создать устройство с астатизмом по отклонению, работающее в автоколебательном режиме с расширенной полосой пропускания и значительным быстродействием.
На фиг.2 изображена схема моделирования предлагаемого устройства. На фиг.3 переходные процессы в прототипе (1) и в предлагаемом устройстве (2). Из их анализа следует, что предлагаемое устройство, работающее в автоколебательном режиме, имеет значительную полосу пропускания и быстродействие.
Предложенный способ изменения полосы пропускания и точности может быть использован в устройствах компенсационного типа (акселерометры и датчики угловой скорости) выпускаемых промышленностью без изменения их конструкции и технологии изготовления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513665C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2539826C2 |
| Компенсационный акселерометр | 2019 |
|
RU2720327C1 |
| Компенсационный акселерометр | 2020 |
|
RU2724241C1 |
| Компенсационный акселерометр | 2019 |
|
RU2700339C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2397498C1 |
| Компенсационный акселерометр | 2019 |
|
RU2708716C1 |
| Компенсационный акселерометр | 2020 |
|
RU2736010C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2758196C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2780407C1 |
Изобретение относится к системам навигации и может применяться в приборах измерения механических величин компенсационного типа. Техническим результатом изобретения является повышение точности измерения. Акселерометр содержит чувствительный элемент, датчик момента, включенный в отрицательную обратную связь. В акселерометр введены две отрицательные интегрирующие обратные связи, одна с выхода датчика угла на один из входов датчика момента одновременно через усилитель обратной связи и первый интегратор, другая, отрицательная интегрирующая обратная связь, реализована с выхода датчика угла на другой вход датчика момента последовательно по информационным входам через усилитель, фильтр, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, второй интегратор, триггер, электронный ключ. Дополнительные входы компаратора соединены с выходом генератора вспомогательной частоты. Вход электронного ключа соединен с выходом генератора тока, и вход схемы сравнения соединен с выходом генератора вспомогательной частоты через суммирующий двоичный счетчик, и выход реверсивного двоичного счетчика является цифровым кодом устройства. 3 ил.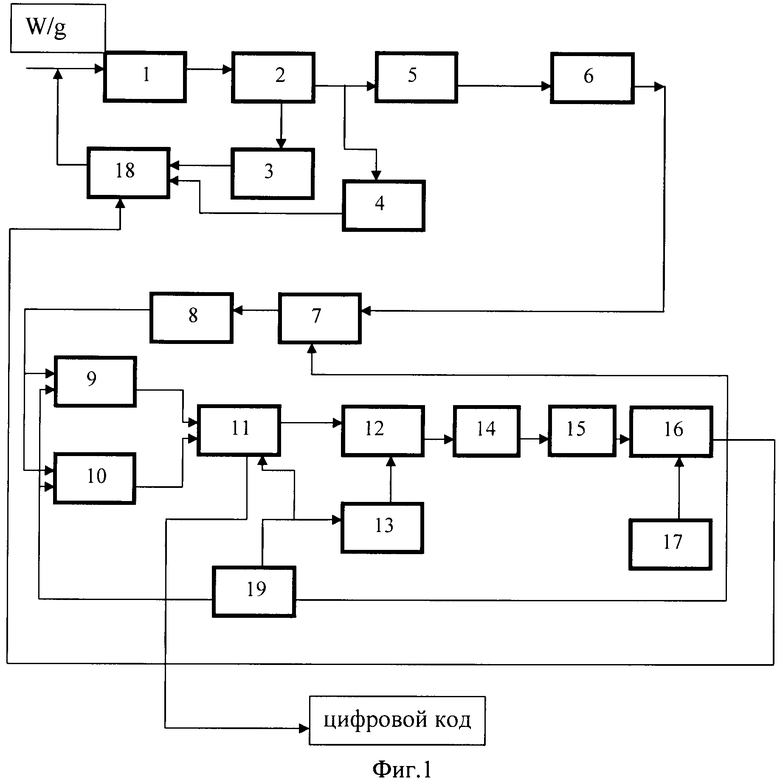
Акселерометр, содержащий чувствительный элемент, отклонение которого фиксируется датчиком угла, датчик момента, включенный в отрицательную обратную связь, отличающийся тем, что в него введены две отрицательные интегрирующие обратные связи, одна с выхода датчика угла на один из входов датчика момента одновременно через усилитель обратной связи и первый интегратор, другая, отрицательная интегрирующая обратная связь, реализована с выхода датчика угла на другой вход датчика момента последовательно по информационным входам через усилитель, фильтр, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, второй интегратор, триггер, электронный ключ, причем дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика, соединены с выходом генератора вспомогательной частоты, кроме того, вход электронного ключа соединен с выходом генератора тока, и вход схемы сравнения соединен с выходом генератора вспомогательной частоты через суммирующий двоичный счетчик, и выход реверсивного двоичного счетчика является цифровым кодом устройства.
| Акселерометр | 1977 |
|
SU742801A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2098833C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2363957C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2397498C1 |

