Настоящее изобретение относится к машине для маркировки или нанесения этикеток, которая содержит такой орган, как пуансон, предназначенный для прессования ленты к внешней поверхности маркируемой или этикетируемой детали. Изобретение относится также к способу маркировки или нанесения этикеток, в котором детали последовательно подводят к такому органу маркировки, как пуансон или органу установки этикеток.
В области маркировки в горячем состоянии известно, например, из документа WO-A-2008/142225 использование пуансона для прижимания маркировочной ленты к периферической поверхности маркируемых деталей, установленных на шести оправках, которые размещены на вращающейся пластине. Эти оправки проходят последовательно через позицию маркировки, позицию контроля и позицию разгрузки, а также через различные промежуточные позиции. Скорость маркировки деталей зависит от средней скорости вращения пластины, которая на практике ограничена различными операциями, которые должны пройти предназначенные для маркировки детали или уже маркированные, несмотря на то, что пластина остановлена.
Известно также из документа GB-A-1 558 536 перемещение чашек между различными позициями печатающей машины с помощью четырех промежуточных органов, шарнирно установленных вокруг центральной оси и каждый из которых соединен с осью зубчатого планетарного колеса. Различные зубчатые планетарные колеса взаимодействуют одно за другим с уклоном кулачка, который также вращается вокруг центральной оси. Движения различных промежуточных органов связаны в той мере, что используется единственный кулачок для перемещения этих промежуточных органов, при этом кулачок может взаимодействовать с одним из этих промежуточных органов только когда он покинул или находится в процессе отхода от другого промежуточного органа. Движения двух зубчатых планетарных колес временно перекрываются, но не могут совершаться одновременно, что соответствует тому, что только единственный кулачок может занимать одно угловое положение вокруг центральной оси.
Аналогичные проблемы возникают с другими машинами для маркировки шелкографией и машинами для нанесения этикеток.
Изобретение предназначено для исключения указанных недостатков и предлагает новую машину для маркировки и нанесения этикеток, производительность которой, по существу, повышена по сравнению с известным уровнем техники.
С этой целью изобретение раскрывает машину для маркировки и нанесения этикеток, содержащую, по меньшей мере, орган для маркировки и нанесения этикеток, а также средства подвода каждой детали, предназначенной для маркировки и нанесения этикеток, к этому органу, причем упомянутые средства подвода содержат, по меньшей мере, два кронштейна, вращающихся вокруг первой общей геометрической оси, на каждом из которых установлен, по меньшей мере, один орган для удержания детали, предназначенной для маркировки и нанесения этикеток. В соответствии с изобретением средства для подвода дополнительно содержат независимые средства привода каждого кронштейна во вращение вокруг первой общей геометрической оси, независимые от другой оси.
Благодаря изобретению кронштейны могут совершать движения в то время, когда один закрыт другим. Другими словами, один из кронштейнов может перемещать деталь для маркировки, или уже промаркированную деталь, или деталь, на которую наносят этикетку, или уже проэтикетированную деталь, тогда как другой кронштейн находится на позиции, где он держит другую деталь, такой как позиция загрузки, позиция маркировки, позиция контроля или позиция разгрузки. Это является особенно предпочтительным, так как продолжительность неподвижного нахождения одного кронштейна на одной из упомянутых позиций зависит от природы осуществляемых операций. Независимость средств привода кронштейнов во вращение вокруг первой геометрической оси позволяет, таким образом, независимое перемещение одного кронштейна от другого с собственной скоростью между различными позициями без влияния на перемещение деталей, осуществляемое одним или несколькими кронштейнами. С помощью соответствующего управления подтверждается, что машина по изобретению, содержащая два независимых кронштейна, позволяет обрабатывать предназначенные для маркировки или нанесения этикеток детали с рабочей скоростью, сравнимой с машиной, снабженной пластиной, на которой установлены шесть оправок, что является предпочтительным одновременно с точки зрения себестоимости машины и инерции перемещаемых масс, то есть срока службы машины.
В соответствии с предпочтительными, но не обязательными аспектами изобретения, такая машина может соответствовать одной или нескольким характеристикам, взятым в технически приемлемой совокупности.
- Независимые средства привода кронштейнов во вращение вокруг первой геометрической оси содержат, по меньшей мере, два электродвигателя, каждый из которых предназначен для привода кронштейна во вращение вокруг этой оси и которые установлены на неподвижной станине машины.
- Машина содержит средства привода каждого органа удержания во вращение вокруг второй геометрической оси, параллельной первой геометрической оси.
- Средства привода во вращение вокруг второй оси опоры, размещенной на первом кронштейне, являются независимыми от средств привода во вращение вокруг второй оси другой опоры, размещенной на втором кронштейне.
- Средства привода во вращение вокруг второй геометрической оси органа удержания, размещенного на кронштейне, содержат вал с центром на первой геометрической оси, кинематически связанный, с одной стороны, с электродвигателем, и, с другой стороны, с органом удержания. В этом случае, связь между электродвигателем и валом и/или связь между валом и органом удержания предпочтительно выполнены в виде гибкой связи, такой как приводной ремень или цепь.
- Средства привода во вращение размещенного на кронштейне органа удержания вокруг второй оси содержат электродвигатель, установленный на этом кронштейне. В этом случае электродвигатель, установленный на кронштейне, предпочтительно управляется с помощью, по меньшей мере, управляющего органа, установленного на опоре, вращающейся вокруг первой геометрической оси, при этом электродвигатель предназначен для привода этой опоры во вращение вокруг первой геометрической оси со скоростью, равной средней скорости вращения кронштейнов на станке.
- По меньшей мере, один из кронштейнов несет два органа удержания одной маркируемой детали с обеих сторон первой геометрической детали.
Изобретение относится также к способу маркировки или нанесения этикеток, который может быть воплощен с помощью описанной выше машины, а точнее к способу, в котором детали подводят последовательно, по меньшей мере, к органу маркировки или нанесения этикеток. Этот способ характеризуется тем, что он включает следующие этапы:
а) загрузки детали на орган удержания, размещенный на кронштейне комплекса из нескольких кронштейнов, вращающегося вокруг первой геометрической оси;
b) поворота кронштейна, на котором закреплена деталь, вокруг первой оси до момента, пока деталь не окажется напротив органа маркировки или нанесения этикеток, независимо от движения одного или нескольких кронштейнов комплекса рычагов;
с) поворота органа удержания и детали относительно кронштейна вокруг второй геометрической оси, параллельной первой оси;
d) маркировки детали с помощью маркировочного органа или размещения этикетки на внешней поверхности этикетируемой детали с помощью органа, наносящего этикетки;
е) поворота кронштейна вокруг первой оси до тех пор, пока деталь не окажется на уровне позиции разгрузки, независимо от движения одного или нескольких кронштейнов комплекса кронштейнов; и
f) выгрузки детали из органа удержания.
В соответствии с этим способом каждый кронштейн перемещает деталь, предназначенную для маркировки или уже маркированную, независимо от других кронштейнов, обеспечивая его привод во вращение вокруг первой или второй геометрической оси, что дает выигрыш во времени в процессе маркировки.
В дальнейшем изобретение поясняется нижеследующим описанием четырех вариантов воплощения машины и способа, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
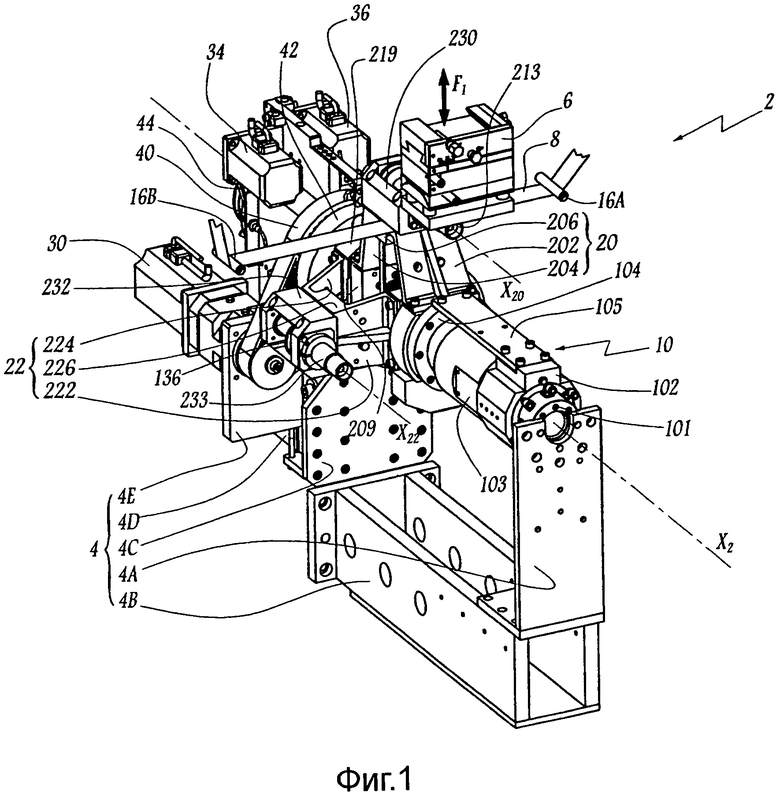
- фиг.1 изображает вид в аксонометрии части машины для маркировки по изобретению:
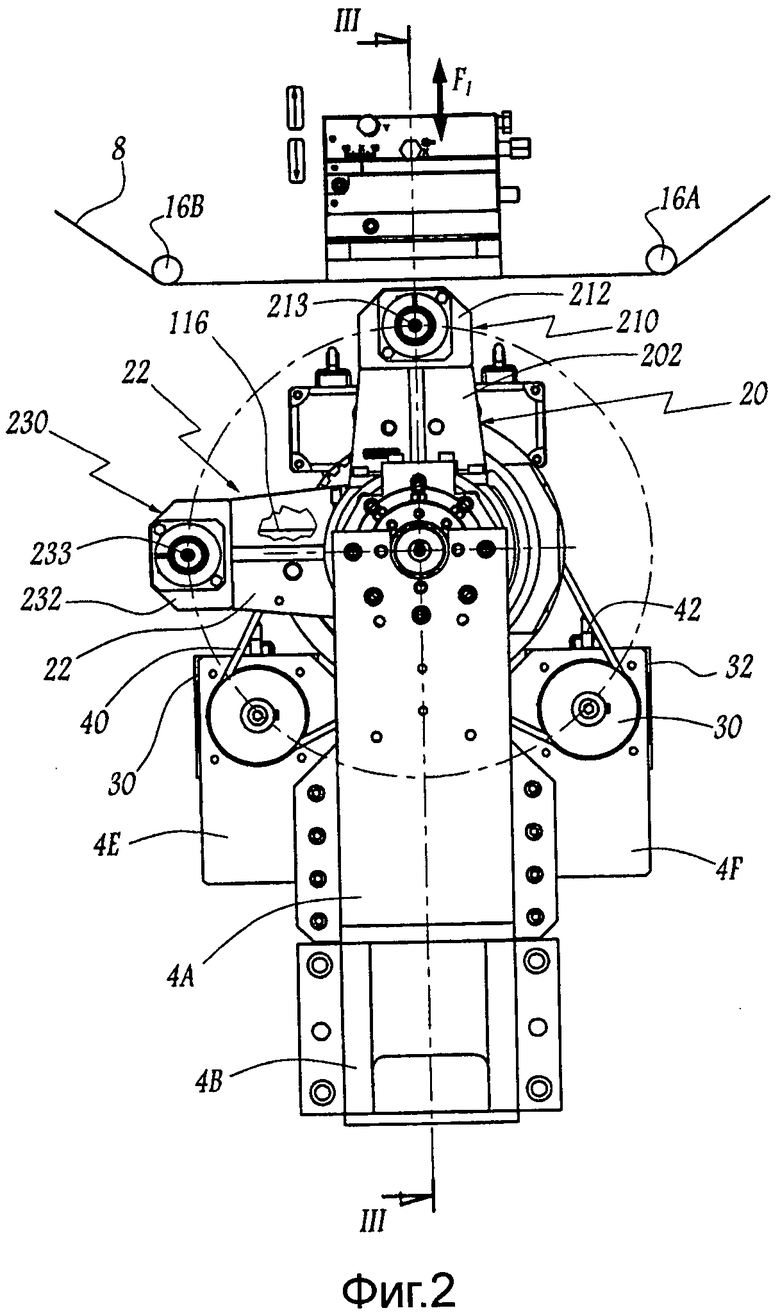
- фиг.2 изображает вид спереди машины по фиг.1 с частичным вырезом;
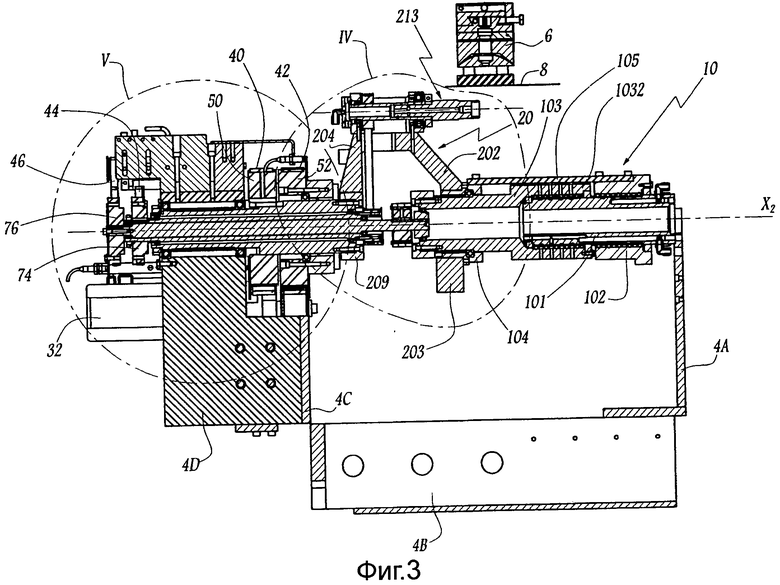
- фиг.3 изображает разрез по линии III-III по фиг.2;
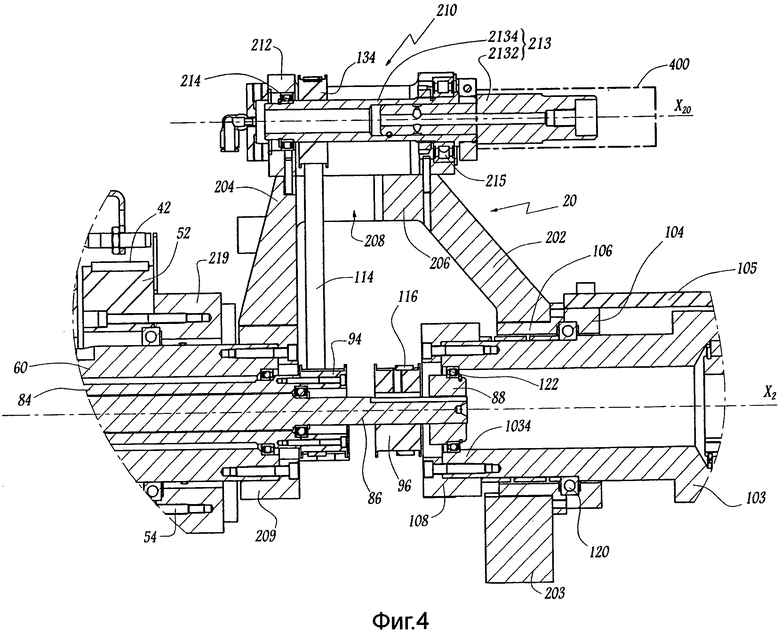
- фиг.4 изображает вид в укрупненном масштабе детали IV по фиг.3;
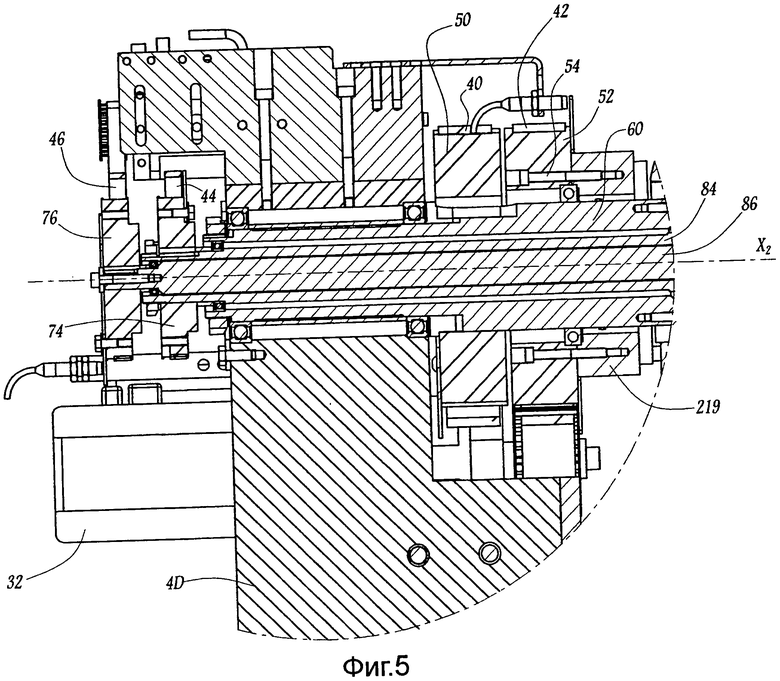
- фиг.5 изображает вид в укрупненном масштабе детали V по фиг.3;
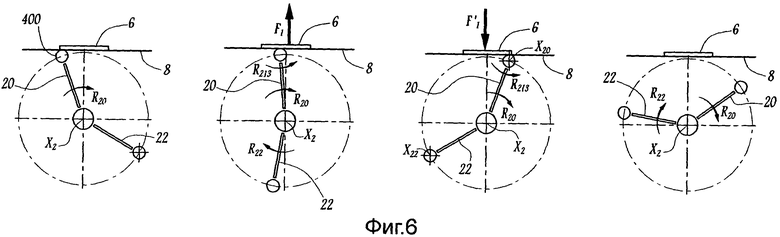
- фиг.6 является схематичным принципиальным изображением на виде спереди положения кронштейнов и пуансона машины по фиг.1-5 в процессе маркировки;
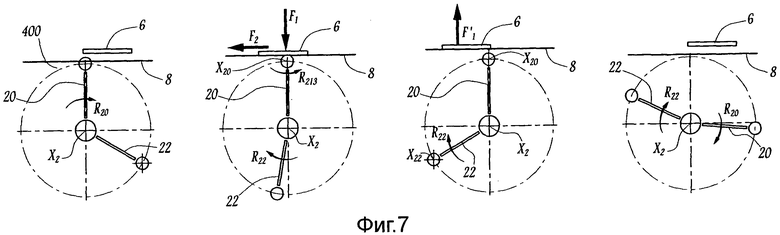
- фиг.7 изображает вид, аналогичный фиг.6, для варианта способа маркировки;
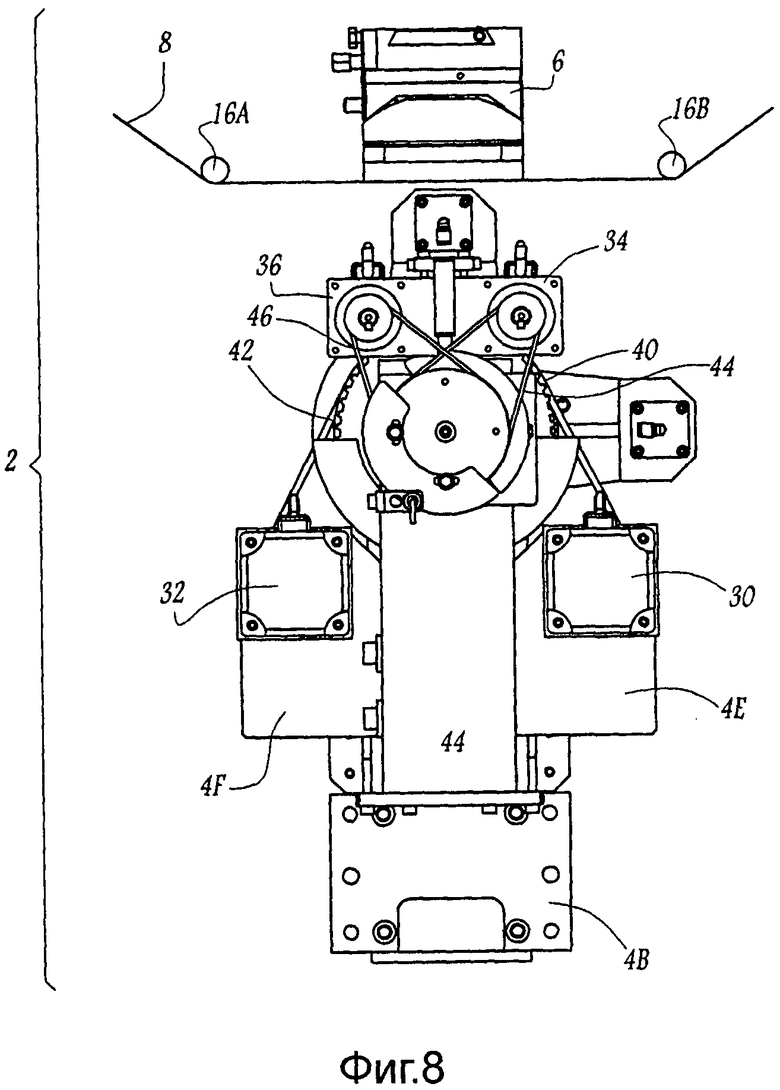
- фиг.8 изображает вид сзади машины по фиг.1-7;
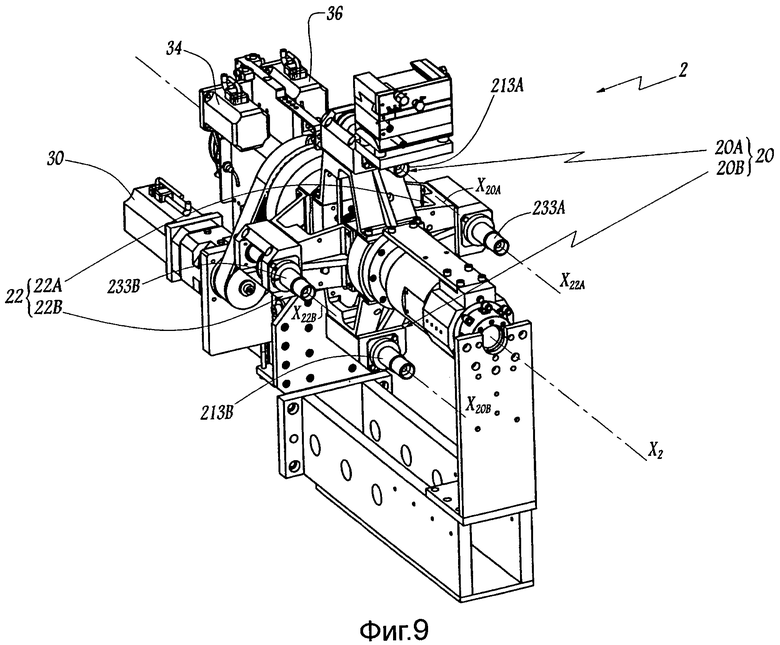
- фиг.9 изображает вид в аксонометрии, аналогичный фиг.1, для машины в соответствии со вторым вариантом воплощения изобретения;
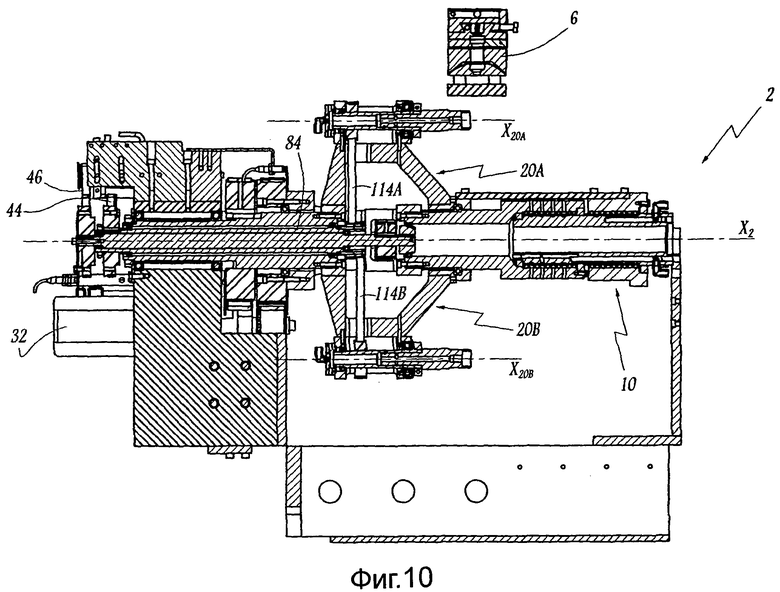
- фиг.10 изображает продольный разрез, аналогичный фиг.3, для машины по фиг.9;
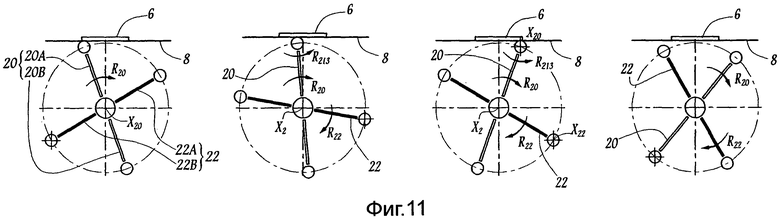
- фиг.11 представляет собой схематичное изображение, аналогичное фиг.6, для машины по фиг.9 и 10;
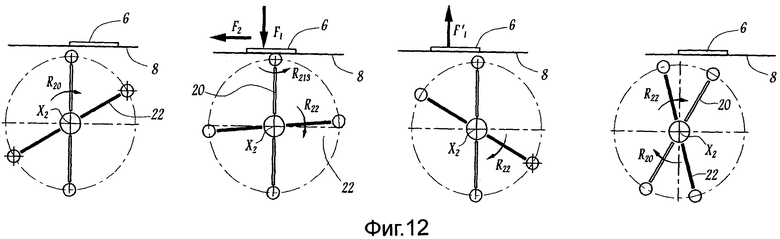
- фиг.12 изображает вид, аналогичный фиг.11, для варианта способа маркировки;
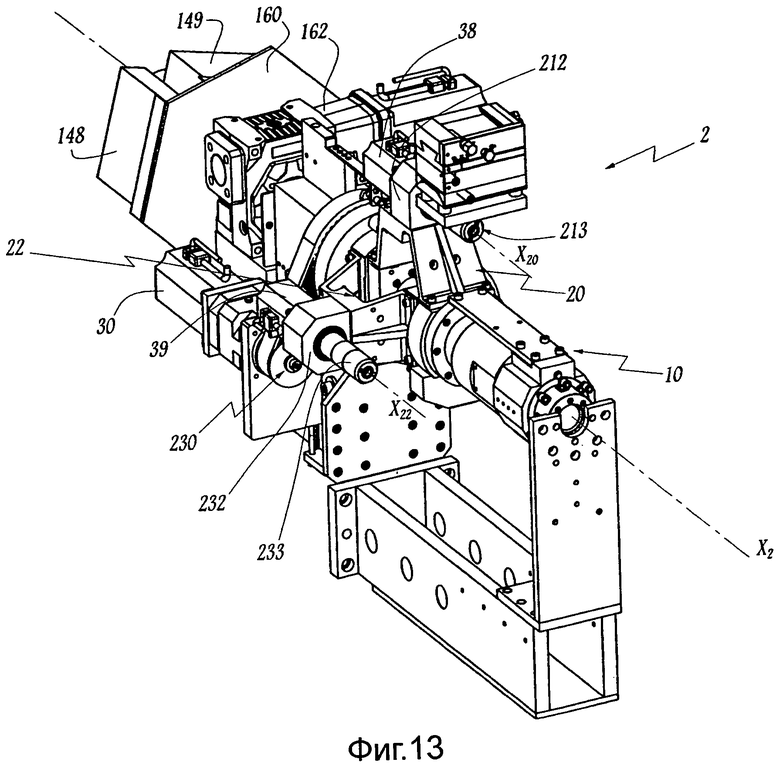
- фиг.13 изображает вид в аксонометрии, аналогичный фиг.1, для машины в соответствии с третьим вариантом воплощения изобретения;
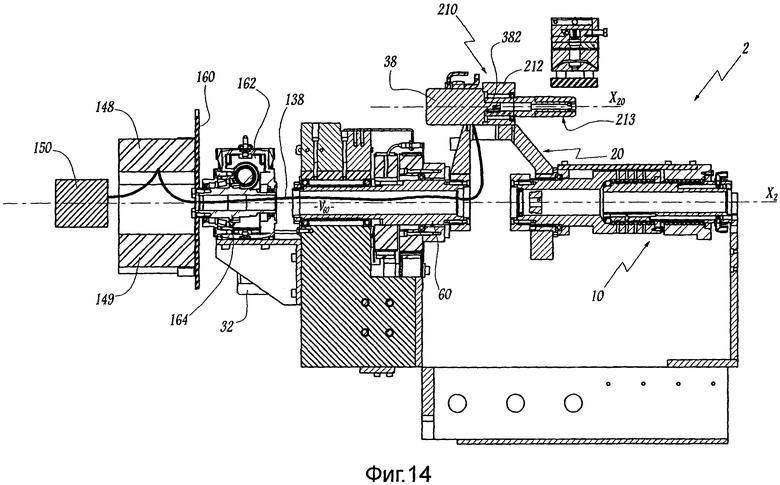
- фиг.14 изображает продольный разрез, аналогичный фиг.3, для машины по фиг.13;
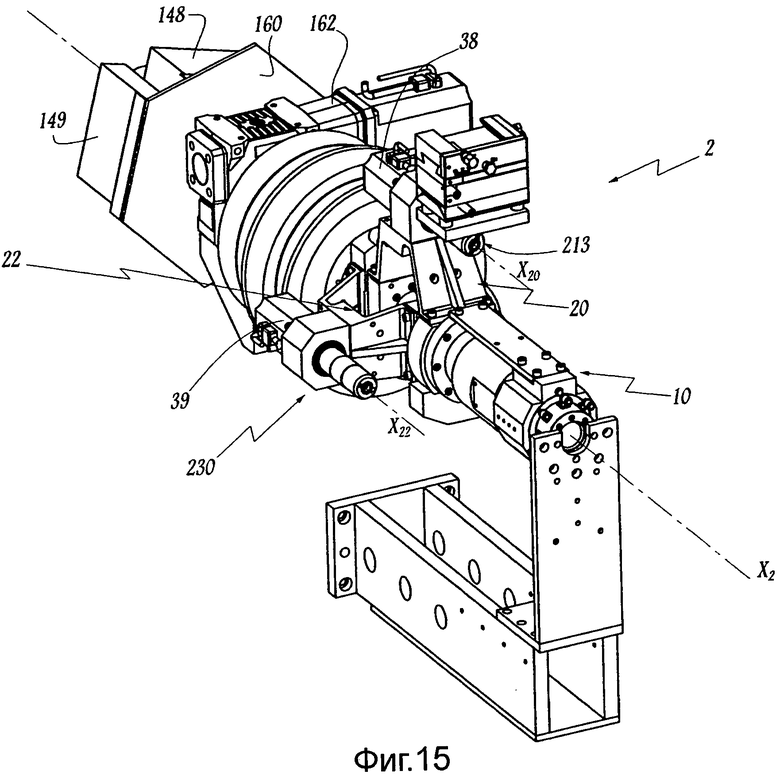
- фиг.15 изображает вид в аксонометрии, сравнимый с фиг.1, для машины в соответствии с четвертым вариантом воплощения изобретения; и
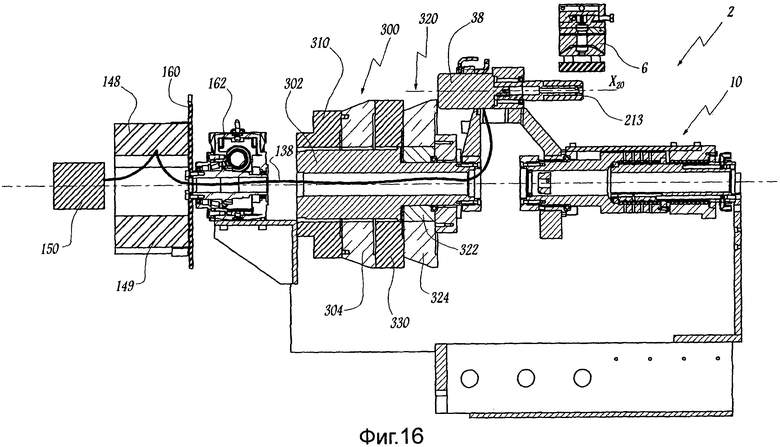
- фиг.16 изображает продольный разрез, аналогичный фиг.3, для машины по фиг.15.
Для наглядности чертежей маркировочная лента машин по фиг.9-16 не изображена.
Машина 2, изображенная на фиг.1-7, содержит неподвижную станину 4, а также пуансон 6 нагревающего типа, который способен совершать вертикальные перемещения, изображенные двойной стрелкой F1 на фиг.1 и 2. Этот нагревающий пуансон 6 предназначен для прижатия ленты 8 к внешней поверхности маркируемых деталей, таких как флаконы для духов или косметических изделий, эти флаконы имеют обычно цилиндрическую форму, наиболее часто с кольцевым сечением. Для наглядности чертежей эти детали не изображены на чертежах за исключением детали на фиг.4.
Лента 8 протянута между питающей бобиной и бобиной для приема отработанной ленты, известными сами по себе, и поэтому они не изображены. Лента 8 перемещается по направляющим роликам 16А и 16В.
Чтобы подвести предназначенные для маркировки детали к пуансону 6, машина 2 снабжена двумя подвижными кронштейнами 20 и 22, вращающимися вокруг одной и той же геометрической оси Х2, определяемой станиной 4 и перпендикулярной направлению перемещения пуансона 6, то есть горизонтальной в примере по чертежам.
В настоящем описании термины «спереди» и «сзади» используются при рассмотрении машины 2, представленной на фиг.1 и передняя часть которой ориентирована к изучающему чертеж. Другими словами, передняя часть машины видна на фиг.2 и справа на фиг.3, тогда как задняя часть машины видна на фиг.8 и слева на фиг.3.
Станина 4 содержит жестко соединенные переднюю пластину 4А, продольную балку 4В, заднюю пластину 4С и каркас 4D. На пластине 4А установлен вращающийся коллектор, который питается воздухом под давлением для распределения между различными пневматическими органами машины 2. Этот коллектор содержит неподвижную центральную часть 101, снабженную центральным отверстием и несколькими трубопроводами для циркуляции воздуха под давлением в направлении проходов, выполненных по периферии этой центральной части. Первое кольцо 102 установлено вокруг центральной части 101 с возможностью вращения вокруг оси Х2. Вдоль оси Х2 в продолжение центральной части 101 полый вал 103 установлен с возможностью вращения вокруг оси Х2 и содержит концевую часть 1032, которая частично окружает центральную часть 101. Второе кольцо 104 установлено вокруг вала 103 с возможностью вращения вокруг оси Х2. Пластина 105 связывает два кольца 102 и 104, будучи жестко соединенной с каждым из колец с помощью болтов так, чтобы эти кольца могли вращаться вместе вокруг оси Х2 и элементов 101 и 103. Между кольцом 104 и валом 103 установлен подшипник 120. Втулка 106 вращается одновременно с кольцом 104.
Кронштейн 20 содержит переднюю пластину 202 и заднюю пластину 204, соединенные пластиной 206, в которой выполнено отверстие 208. Кронштейн 202 установлен на втулке 106, которая сама удерживается подшипником 120 относительно вала 103.
Кронштейн 20 несет оборудование 210 для удержания маркируемой детали, которое содержит кожух 212, полую оправку 213 и два подшипника 214 и 215 для удержания полой оправки 213 относительно кожуха 212 с возможностью вращения вокруг оси Х20, определяемой кожухом 212, параллельной оси Х2 и обособленной от этой оси.
Как следует, в особенности, из фиг.4, полая оправка 213 разделена на две части и содержит переднюю часть 2132 и заднюю часть 2134.
Передняя часть 2132 предназначена для размещения внутри маркируемой детали, которая изображена только на фиг.4 штрихпунктирной линией и обозначена позицией 400.
В отличие от оборудования 210 кронштейн 200 снабжен противовесом 203, который позволяет уравновесить воздействие кронштейна 20 на вал 103.
Кронштейн 22 имеет конструкцию, сравнимую с конструкцией кронштейна 20, и содержит переднюю пластину 222, заднюю пластину 224, пластину 226, снабженную отверстием, которое не видно на чертежах, но сравнимо с отверстием 208. Оборудование 230 установлено на кронштейне 22 и содержит кожух 232, разделенную на две части оправку 233 и подшипники, подобные подшипникам 214 и 215. Кронштейн 22 установлен на третьем кольце 108, вращающемся вместе с конечной частью 1034 вала 103, противоположной центральной части 101. Кронштейн 22 оборудован не изображенным на чертеже противовесом.
Бесщеточный электрический двигатель 30 установлен на пластине 4Е, закрепленной на станине 4, и его выходной вал соединен c зубчатым приводным ремнем 40, который приводится зубчатым колесом 50, соединенным шпонкой с полым валом 60, на котором жестко установлена опора 209. Задняя пластина 204 кронштейна 20 закреплена на опоре 209 с помощью болтов, один из которых виден на фиг.1. Таким образом, питание электрическим током двигателя 30 приводит во вращение кронштейн 20 вокруг оси Х2.
Кроме того, второй бесщеточный электродвигатель 32 установлен на пластине 4F, закрепленной на станине 4, и его выходной вал взаимодействует с зубчатым приводным ремнем 42, который охватывает зубчатое колесо 52, соединенное болтом 54 с опорой 219. Задняя пластина 224 кронштейна 22 закреплена с помощью болта, который единственно виден на фиг.1, на опоре 219. Таким образом, питание электрическим током двигателя 32 заставляет вращаться кронштейн 22 вокруг оси Х2.
Так как двигатели 30 и 32 могут питаться независимо один от другого, кинематические связи, образованные этими двигателями, ременными передачами, зубчатыми колесами и упомянутыми опорами, а также в том, что касается кронштейна 20, образуют независимые средства привода каждого из кронштейнов 20 и 22, вращающихся вокруг оси Х2 независимо от другого кронштейна.
Кроме того, третий бесщеточный двигатель 34 установлен на станине 4 и его выходной вал приводит в движение через ремень 44 шкив 44, закрепленный шпонкой на конце вала 84, размещенный по оси Х2 радиально внутри вала 60. Конец вала 84, противолежащий шкиву 74, несет второй шкив, на который намотан ремень 114, который проходит через отверстие 208 и также намотан на шкив 134, жестко закрепленный вокруг задней части полой оправки 213. Возможно также, запитывая двигатель 34, заставлять вращаться элементы 74, 84, 94, 114, 134 и 213 таким образом, чтобы полая оправка 213 вращалась вокруг оси Х20. Это позволяет приводить во вращение маркируемую деталь 400 вокруг ее продольной оси, когда эта деталь удерживается передней частью 2132 оправки 213.
Таким же образом, четвертый бесщеточный двигатель 36 закреплен на станине 4 и его выходной вал приводит в движение через ремень 46 шкив 76, закрепленный на первом конце вала 86 по оси Х2 и размещенный радиально внутри вала 84. Второй шкив 96 жестко установлен на противолежащем конце вала 86, приводящем в движение ремень 116, видимый в разрезе на фиг.2, и который вращается на шкиве 136, вращающемся одновременно с полой оправкой 233, что позволяет приводить во вращение эту оправку вокруг оси Х22, параллельной осям Х2 и Х20 и отделенной от них.
Вал 86 продолжается вдоль оси Х2 до внутренней части конца 1034 вала 103, где зубчатое колесо 88 жестко закреплено шпонкой на валу 86. Подшипник 122 обеспечивает центровку валов 86 и 103 между ними с возможностью относительного вращения.
Средства привода во вращение оправок 213 и 223 соответственно вокруг осей Х20 и Х22 являются независимыми одни от других в той мере, что они позволяют приводить во вращение одну или другую из оправок 213 и 223 вокруг осей Х20 и Х22 или обеих в зависимости от питания двигателя 34, двигателя 36 или обоих двигателей.
Так как двигатели 30-36 закреплены на станине 4, они не перемещаются в процессе вращательных движений кронштейнов 20-22, так как инерция этих шкивов является относительно небольшой, что облегчает перемещения с повышенной скоростью и ограничивает износ удерживающих деталей, таких как подшипники.
В соответствии с не представленным опционным аспектом изобретения на пути перемещения ремней могут быть размещены натяжные устройства, в частности на пути ремней 114, 116.
Когда необходимо маркировать деталь 400 с помощью ленты 8, деталь устанавливается на один из кронштейнов, например на кронштейн 20, и последний перемещается до сближения с пуансоном 6 в направлении вращения по стрелке R20 на первой схеме по фиг.6. Кронштейн 22 является неподвижным в положении, когда деталь, предварительно загруженная на оправку 33, снимается с этого кронштейна на позиции разгрузки. Продолжая движение вращения R20, кронштейн 20 отслеживает движение опускающегося пуансона 6, обозначенное стрелкой F1, согласно второй схеме на фиг.6. Действительно, пуансон 6 механизирован, что позволяет приспосабливать его положение по высоте к положению маркируемых деталей для гарантии хорошего контакта. В это время кронштейн 22 может переместиться на позицию загрузки детали 400 на свой вал 233 со скоростью, которая может быть равной или отличной от скорости вращения кронштейна 20. В процессе части движения кронштейна 20, когда деталь 400, которую он перемещает, находится в соприкосновении с лентой 8, эта деталь приводится во вращение вокруг оси Х20, что обозначено стрелкой R213 на второй схеме фиг.6. На третьей схеме кронштейн 22 достигает позиции загрузки, где деталь 400 может быть надета на полую оправку 233, в то время как кронштейн 20 продолжает вращаться вокруг оси Х2, что обозначено стрелкой R20, чтобы отойти от пуансона 6, который перемещается радиально в направлении оси Х2, как обозначено стрелкой F'1. В этой конфигурации деталь в процессе маркировки приводится во вращение вокруг оси Х20, что обозначено стрелкой R213. На четвертой схеме фиг.6 кронштейн 22 находится в процессе перемещения для того, чтобы подвести деталь, которую он несет на позицию маркировки, что обозначено стрелкой R22, в то время как кронштейн 20 находится в процессе перемещения для подвода детали, которую он несет к позиции разгрузки, что обозначено стрелкой R20. Скорости перемещения кронштейнов 20 и 22 на этом этапе могут быть одинаковыми или различными, что обеспечивается независимыми средствами привода во вращение этих кронштейнов вокруг оси Х2.
В варианте, представленном на фиг.7, кронштейны 20 и 22 также осуществляют движение вращения R20 и R22, которые независимы одно от другого. В этом варианте воплощения кронштейн 20 удерживается неподвижным в процессе маркировки детали 400, которую он несет. На первой схеме фиг.7 кронштейн 20 перемещается в верхнее положение к пуансону 6, что обозначено стрелкой R20. Затем пуансон опускается в направлении стрелки F1, при этом кронштейн удерживается неподвижным, затем пуансон 6 перемещается горизонтально в направлении стрелки F2, показанной на второй схеме фиг. 7, поворачиваясь на детали, удерживаемой полой оправкой 213, которая вращается, таким образом, вокруг оси Х20, что обозначено стрелкой R213. По окончании маркировки пуансон 6 отводится от детали, что обозначено стрелкой F'1 на третьей схеме фиг.7.
В процессе этих перемещений вращение кронштейна 22 между позицией разгрузки, где этот кронштейн представлен на первой схеме, и позицией загрузки, где этот кронштейн представлен на третьей схеме, происходит во время, скрытое относительно неподвижного состояния кронштейна 20, необходимое для маркировки детали, которую он несет. Стрелка R22 обозначает это вращение.
На последнем этапе способа, проиллюстрированного фиг.7, кронштейны 20 и 22 вращаются вокруг оси Х2, что обозначено стрелками R20 и R22, для того, чтобы привести кронштейн 22 в положение кронштейна 20 на первой схеме, и наоборот.
В одном из вариантов способа, представленных на фиг.6 и 7, можно остановить один из кронштейнов 20 или 22 в угловом секторе, где кронштейн 20 изображен на четвертой схеме на фиг.6, для обеспечения контроля маркировки, выполненной на детали, которую он несет, при этом кронштейн 22 перемещается для подвода детали к пуансону 6. Кроме того, возможно остановить кронштейн 22 в угловом секторе, где он изображен на четвертой схеме на фиг.6, для осуществления оптического считывания маркируемой детали. В этих угловых секторах можно осуществлять другие операции с остановкой или перемещением с малой скоростью кронштейнов 20 или 22.
Во втором и четвертом вариантах воплощения изобретения, представленных на фиг.9-16, элементы, аналогичные элементам первого варианта воплощения, обозначены теми же позициями. В дальнейшем будет, в основном, описано то, что отличает эти варианты воплощения от предыдущих.
Во втором варианте воплощения, представленном на фиг.9-13, кронштейн 20 выполнен двойным в том смысле, что он содержит две части 20А и 20В, которые вытянуты соответственно с обеих сторон оси Х2 и каждая из которых несет полую оправку 213А, 213В, выполняющую функцию органа удержания для приема и перемещения маркируемых деталей.
Таким же образом кронштейн 22 содержит две части 22А и 22В, которые вытянуты с обеих сторон оси Х2 и каждая из которых несет полую оправку 233А и 233В, выполняющую функцию органа удержания для приема и перемещения маркируемых деталей.
Кронштейны 20 и 22 в этом случае снабжены противовесами.
Части кронштейнов 20А и 20В, с одной стороны, 22А и 22В, с другой стороны, жестко соединены между собой и приводятся во вращение подобно тому, как было описано для первого варианта воплощения соответственно с помощью бесщеточных электродвигателей 30 и 32, соединенных с приводными ремнями 40 или тому подобным. Кроме того, два бесщеточных электродвигателя 34 и 36 обеспечивают привод во вращение полых валов 213А, 213В, 233А и 233В соответственно вокруг их продольных осей Х20А, Х20В, Х22А, Х22В.
Как, в особенности, следует из фиг.10, вал 84, приводимый во вращение двигателем 34, снабжен двойным шкивом 94, который приводит два ремня 114А и 114В, обеспечивающих одновременное вращение полых оправок 213А и 213В вокруг осей Х20А и Х20В, которые параллельны оси Х2. Подобную же конструкцию имеет кронштейн 22.
Как, в особенности, следует из фиг.11, возможно вращать кронштейн 20 для подвода удерживаемой им детали 400 для контакта с пуансоном 6, при этом кронштейн 22 может вращаться или нет. Так как каждый из кронштейнов 20 несет два органа удержания, образованных полыми оправками 213А и 213В, можно подвести удерживаемые этими кронштейнами детали к четырем позициям раздельной обработки машины 2. В остальном способ по фиг.11 сравним со способом по фиг.6.
Способ по фиг.12 сравним со способом по фиг.7, при этом двойные кронштейны позволяют манипулировать одновременно четырьмя деталями.
В третьем варианте воплощения по фиг.13 и 14 двигатели 34 и 36 заменены бесщеточными двигателями 38 и 39, соответственно установленными на кронштейнах 20 и 22, что позволяет их соответствующим выходным валам 382 и эквивалентным непосредственно приводить во вращение полые оправки 213 и 233. На практике двигатели 38 и 39 жестко закреплены на кожухах 212 и 232 оборудования 210 и 230, которое несет соответственно кронштейны 20 и 22.
Что касается остального, бесщеточные электродвигатели 30 и 32, аналогичные двигателям из первого варианта воплощения, взаимодействуют совместно с зубчатыми ремнями для привода во вращение валов 20 и 22 вокруг оси Х2.
Двигатели 38 и 39 запитываются каждый от электрического кабеля, при этом электрический кабель 138 двигателя 38 виден на фиг.14, тогда как кабель, питающий двигатель 39, не изображен для ясности понимания чертежа. Этот электрический кабель проходит через центральный объем V60 полого вала 60, используемого для привода кронштейна 20 во вращение вокруг оси Х2. Этот кабель 138 протянут между вращающимся коллектором 150, образующим источник питания, и двигателем 38, причем этот коллектор сам связан с не представленным блоком управления.
Для облегчения движущихся масс, перемещаемых каждым кронштейном 20 или 22, управляющие вариаторы 148 и 149 двигателей 38 и 39 установлены на пластине 160, вращающейся вокруг оси Х2. Эти вариаторы 148 и 149 равномерно распределены на пластине 160. Кабель 138 проведен практически от вращающегося коллектора 150 до вариатора 148, затем от вариатора 148 до двигателя 38. Для исключения того, чтобы кабель 138 искривлялся в процессе использования машины 2 в течение относительно длительного периода или отрывался от одного из вариаторов 148 или от двигателя 138, пластина 160 приводится во вращение вокруг оси Х2 с помощью бесщеточного двигателя, который соединен с полым валом 164, в центре которого вращается также кабель 138.
Пластина 160 приводится во вращение двигателем 162 с угловой скоростью, соответствующей средней скорости перемещения кронштейнов 20 и 22 вокруг оси Х2. Таким образом, в конце одного оборота кронштейнов 20 и 22 пластина 160 приходит в угловое положение, соответствующее ее начальному положению относительно кронштейнов 20 и 22. В этих условиях угловое смещение между пластиной 160 и двигателями 38 и 39 остается относительно слабым, так что отсутствует риск повреждения кабеля 138с или соответствующего кабеля, который питает двигатель 39.
Вариант воплощения по фиг.15 и 16 отличается от предыдущего тем, что вместо двигателей 30 и 32 используют два спаренных двигателя, роторы которых 302 и 322 отцентрованы по оси Х2. Каждый из этих двигателей содержит статор 304 или 324, способный индуцировать в роторе 302 и 322 момент вращения со скоростью, сравнимой с функциями кронштейнов 20 и 22, которые вращаются одновременно с ротором 302 и 322. Две опоры 310 и 330 образуют подшипники, удерживающие, по меньшей мере, один из роторов, а именно ротор 302, при этом следует учесть, что ротор 322 расположен радиально вокруг части ротора 302.
Двигатели 300 и 320 обеспечивают, таким образом, независимый один от другого привод вокруг оси Х2, которая является общей осью вращения роторов 302 и 322. Оправки 213 и 233, установленные на концах кронштейнов 20 и 22, приводятся во вращение вокруг двух осей Х20 и Х22 параллельно оси Х2 двигателями 38 и 39, аналогичными двигателям по третьему варианту воплощения.
Во всех вариантах воплощения вращающийся коллектор 10 позволяет питать воздухом пневматические узлы, такие как позиционирующие гидроцилиндры. Например, каждый кронштейн 20 или 22 может быть соединен с гидроцилиндром, позволяющим прижимать маркируемую деталь 213 или 223. Кроме того, полые оправки 213 и 233 могут запитываться воздухом, чтобы «надувать» деталь 400 перед маркировкой для натяжения ее стенки.
Независимо от воплощения рассматриваемого варианта, изобретение позволяет размещать различные позиции, в которых осуществляют воздействие на маркируемые детали в положениях, в которых угловое расхождение не обязательно равно 60°, как в случае машины с вращающейся пластиной, известном из существующего уровня техники. Угловое расхождение между постом загрузки и зоной наложения маркировки на деталь может быть отлично от углового расхождения между зоной маркировки и зоной разгрузки. Кроме того, изобретение позволяет загрузить объект на один из кронштейнов 20 или 22 во всех угловых положениях вокруг оси Х2, что позволяет приспособить позицию загрузки к геометрии маркируемых деталей.
Изобретение позволяет также приводить во вращение маркируемую деталь вокруг оси Х20 или Х22, тогда как кронштейн 20 или 22, который ее удерживает, еще вращается вокруг оси Х2, что дает выигрыш во времени вначале этапа маркировки вследствие осуществляемого упреждения. Ускорения, получаемые движущимися деталями, могут быть уменьшены вследствие упомянутого упреждения.
В соответствии с не представленным вариантом изобретения, пуансон, используемый для маркировки деталей, может быть ненагреваемым пуансоном.
В соответствии с другим не представленным вариантом можно использовать два или больше маркирующих приспособления, так как кронштейны могут последовательно останавливаться напротив этих маркирующих узлов независимо от пути других кронштейнов.
Кронштейны, на каждом из которых установлены два держателя, такие как кронштейны 213 и 233, могут быть использованы в третьем и четвертом вариантах воплощения с использованием технического описания второго варианта воплощения.
Количество кронштейнов в машине как вариант может быть больше 2.
В качестве альтернативы ременным передачам, которые образуют гибкие связи для привода кронштейнов и оправок, можно использовать цепи.
Изобретение было описано выше для случая, когда маркировка осуществляется в процессе вращательного движения детали на оправке. Изобретение, во всяком случае, может быть использовано для машины, в которой маркировка осуществляется прямой штамповкой на плоской поверхности объекта. Изобретение может также использоваться в машине для маркировки формованных деталей, то есть деталей с некруглым сечением.
Описанное выше изобретение изображено на приложенных чертежах для варианта воплощения, касающегося маркировочной машины, что является предпочтительным.
Изобретение может быть также использовано для шелкографической машины, в этом случае необходимо разместить маркируемую деталь напротив экрана с нанесенными на него красками, образующего маркирующий узел, функция которого сопоставима с функцией упомянутого выше пуансона 6.
Изобретение применимо также в других вариантах осуществления, для этикетирующей машины, точнее машины для нанесения этикеток, в которой ширина рулона, на которой размещены этикетки, достигает ширины этикетируемых деталей, при этом печатающий узел, часто называемый «шашкой», периодически прессует этикетку к внешней поверхности этикетируемых деталей для наложения этикетки. Кроме того, этикетируемые детали должны перемещаться относительно органа для нанесения этикеток, которым является шашка, и изобретение может использоваться для этого.
Настоящее изобретение относится к машине для маркировки или нанесения этикеток, которая содержит такой орган, как пуансон, предназначенный для прессования ленты к внешней поверхности маркируемой или этикетируемой детали. Изобретение относится также к способу маркировки или нанесению этикеток, в котором детали последовательно подводят к такому органу маркировки, как пуансон или органу установки этикеток. Машина (2) для маркировки или нанесения этикеток содержит, по меньшей мере, один маркирующий или наносящий этикетки орган (6) и средства подвода каждой детали для маркировки или нанесения этикеток к этому органу (6). Средства подвода содержат, по меньшей мере, два кронштейна (20, 22), вращающихся вокруг первой общей геометрической оси (Х2), каждый из которых содержит, по меньшей мере, орган (213, 233) удержания для маркируемой или подлежащей нанесению этикеток детали, а также независимые средства (30, 40, 42) привода каждого из кронштейнов во вращение вокруг первой геометрической оси (Х2) независимо от другого кронштейна. Технический результат заключается в обеспечении возможности совершения движений кронштейнов в то время, когда один закрыт другим. 2 н. и 8 з.п. ф-лы, 16 ил.
1. Машина (2) для маркировки или нанесения этикеток, содержащая, по меньшей мере, орган (6) маркировки или нанесения этикеток и средства подвода каждой маркируемой или подлежащей нанесению этикеток детали к органу маркировки или нанесения этикеток, причем средства подвода содержат, по меньшей мере, два кронштейна (20, 22), вращающихся вокруг первой общей геометрической оси (Х2), на каждом из которых установлен орган (213, 233, 213А, 213В, 233А, 233В) удержания маркируемой или этикетируемой детали, отличающаяся тем, что средства подвода дополнительно содержат независимые средства (30, 32, 40, 42, 50, 52, 60, 209, 219, 300, 320) привода каждого из кронштейнов во вращение вокруг первой общей геометрической оси (Х2) независимо от другого кронштейна.
2. Машина по п.1, отличающаяся тем, что независимые средства содержат, по меньшей мере, два электродвигателя (30, 32, 300, 320), каждый из которых предназначен для привода кронштейна (20, 22) во вращение вокруг первой геометрической оси (Х2) и которые установлены на неподвижном шасси (4) машины (2).
3. Машина по одному из предыдущих пунктов, отличающаяся тем, что она содержит средства (34, 36, 74, 76, 84, 86, 94, 96, 114, 116) привода каждого органа (213, 233, 213А, 213В, 233А, 233В) удержания во вращение вокруг второй геометрической оси (Х20, Х22), параллельной первой геометрической оси (Х2).
4. Машина по п.3, отличающаяся тем, что средства привода (34, 74, 84, 94, 114) во вращение вокруг второй оси (Х20) опоры, размещенные на первом кронштейне (20), являются независимыми от средств привода (36, 76, 86, 96, 116) во вращение вокруг второй оси (Х22) другой опоры (233, 233А, 233В), размещенной на втором кронштейне (22).
5. Машина по п.3, отличающаяся тем, что средства привода во вращение вокруг второй геометрической оси (Х20, Х22) органа удержания (213, 233, 213А, 213В, 233А, 233В), размещенного на кронштейне, содержат вал (84, 86), отцентрованный по первой геометрической оси (Х2) и кинематически соединенный с одной стороны с электрическим приводом (34, 36) и с другой стороны с органом удержания.
6. Машина по п.5, отличающаяся тем, что связь между электрическим приводом (34, 36) и валом (84, 86) и/или связь между валом и органом удержания (213, 233) выполнена в виде гибкой связи (44, 46, 114, 116).
7. Машина по п.3, отличающаяся тем, что средства привода во вращение вокруг второй оси (Х20, Х22) органа удержания (213, 233), размещенного на кронштейне (20, 22), содержат электродвигатель (38, 39), установленный на кронштейне.
8. Машина по п.7, отличающаяся тем, что электродвигатель (38, 39), установленный на кронштейне, управляется, по меньшей мере, блоком управления (148, 149), установленным на опоре (160), вращающейся вокруг первой геометрической оси (Х2), причем электрический привод (162) выполнен с возможностью приводить опору во вращение вокруг первой геометрической оси со скоростью, равной средней скорости вращения кронштейнов (20, 22) за один оборот.
9. Машина по одному из пп.1 или 2, отличающаяся тем, что, по меньшей мере, один из кронштейнов (20, 22) содержит два органа (213А, 213В, 233А, 233В) удержания для маркируемой детали с обеих сторон первой геометрической оси (Х2).
10. Способ маркировки или нанесения этикеток, в соответствии с которым детали (400), предназначенные для маркировки и нанесения этикеток, последовательно подводят к органу (6) маркировки или нанесения этикеток, отличающийся тем, что включает следующие этапы, на которых:
а) загружают деталь (400) на орган (213, 233, 213А, 233А, 233В) удержания, размещенный на кронштейне (20, 22), входящем в комплекс из нескольких кронштейнов, вращающихся вокруг первой геометрической оси (Х2);
b) осуществляют поворот (R20, R22) кронштейна (20) с загруженной деталью вокруг первой оси, до того как деталь (400) окажется напротив органа (6) маркировки или нанесения этикеток, независимо от перемещения одного или нескольких других кронштейнов (22) комплекса кронштейнов;
с) осуществляют поворот органа (213) удержания и детали (400) относительно кронштейна (20) вокруг второй геометрической оси (Х20) параллельно первой оси;
d) маркируют деталь (F1) с помощью маркировочного узла или наносят этикетку на внешнюю поверхность этикетируемой детали с помощью этикетирующего органа для нанесения этикеток;
е) осуществляют поворот кронштейна (20) вокруг первой оси (Х2) до размещения детали на уровне положения выгрузки независимо от перемещения одного или нескольких других кронштейнов (22) комплекса кронштейнов; и
f) снимают маркированную деталь с органа удержания.

