Изобретение относится к технике измерений, может использоваться в геодезическом приборостроении и предназначено для использования в составе устройств измерения угловых координат летательных аппаратов.
Известно электронно-цифровое устройство измерения угловых координат (электронный теодолит), содержащее пульт управления и объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выходы которых подключены соответственно к первому и второму входам преобразователя угол-код, выход которого с входом цифрового табло, а также блок синхронизации, видеоконтрольное устройство, видеоконтрольный адаптер, закрепленное в опорно-поворотном устройстве, оптически связанное с объективом канала наблюдения и содержащее матрицу фотодетекторов - фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, пульт управления выполнен дистанционным, его первый и второй выходы подключены к управляющим входам соответственно механизмов горизонтального и вертикального наведения, третий и четвертый выходы - к управляющим водам соответственно блока считывания с горизонтального диска и блока считывания с вертикального диска, выход блока синхронизации подключен к синхровходам видеоконтрольного адаптера и устройства считывания информации, электрические выходы которого соединены с входной шиной видеоконтрольного адаптера, выход которого подключен к входу видеоконтрольного устройства (см. RU №2316729, G01C 1/02, 10.02.2008).
Известное электронно-цифровое устройство измерения угловых координат (электронный теодолит) обеспечивает высокую точность измерения угловых координат, удобство их считывания и позволяет выполнять дистанционные измерения, поскольку оператор может находиться в месте, удаленном от места установки теодолита.
Однако, известное электронно-цифровое устройство измерения угловых координат (электронный теодолит) не позволяет выполнять дистанционные измерения угловых координат быстро движущихся объектов, поскольку за один цикл измерения оператором угловых координат движущегося объекта в одной точке его траектории движения, движущийся объект выходит из поля зрения оператора, а так же не позволяет селектировать движущиеся объекты на общем наблюдаемом фоне.
Известно также электронно-цифровое устройство измерения угловых координат, содержащее пульт управления и объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выход последнего из которых подключен к входу первого преобразователя угол-код, а также видеоконтрольное устройство, видеоконтрольный адаптер, второй преобразователь угол-код, устройство регистрации информации, блок формирования отсчетов, блок управления и преобразования информации, содержащий блок синхронизации, преобразователь кодов и преобразователь время-код, закрепленное в опорно-поворотном устройстве и оптически связанное с объективом канала наблюдения фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, выход и синхровход которого соединены соответственно с информационным входом и синхровходом аналого-цифрового преобразователя, выход которого подключен к первой входной шине устройства регистрации информации, вторая входная шина которого соединена с выходом преобразователя кодов, первый, второй входы которого подключены к выходам соответственно первого преобразователя угол-код, второго преобразователя угол-код и преобразователя время-код, вход которого является информационным входом блока управления и преобразования информации, выход блока синхронизации соединен с синхровходом устройства считывания информации, выход которого соединен с информационным входом видеоконтрольного адаптера, выход которого подключен к входу видеоконтрольного устройства, а синхровход - к выходу блока формирования отсчетов, первый и второй выходы которого подключены к управляющим входам соответственно первого и второго преобразователей угол-код, вход последнего из которых подключен к выходу блока считывания с горизонтального диска, при этом пульт управления выполнен дистанционным, а его первый и второй выходы подключены к управляющим входам соответственно механизмов вертикального и горизонтального наведения (см. RU 2358240, G01C 1/06, 10.06.2009).
Известное электронно-цифровое устройство измерения угловых координат обеспечивает высокую точность дистанционных измерений угловых координат быстродвижущихся объектов, например летательных аппаратов.
Однако, известное электронно-цифровое устройство измерения угловых координат не позволяет селектировать движущиеся объекты на общем наблюдаемом фоне.
Наиболее близким к предлагаемому является известное электронно-цифровое устройство измерения угловых координат с селекцией подвижных объектов, содержащее объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы вертикального и горизонтального наведения которого содержат соответственно вертикальный и горизонтальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с вертикального диска и блок считывания с горизонтального диска, выходы которых подключены соответственно к первому входу первого преобразователя угол-код и к первому входу второго преобразователя угол-код, пульт дистанционного управления, первый и второй выходы которого подключены к управляющим входам соответственно механизмов вертикального и горизонтального наведения, закрепленное в опорно-поворотном устройстве и оптически связанное с объективом канала наблюдения фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, выход которого соединен с информационным входом аналого-цифрового преобразователя, видеоконтрольный адаптер, выход которого соединен с входом видеоконтрольного устройства, а информационный вход соединен с выходом устройства считывания информации, устройство регистрации информации, блок формирования отсчетов, блок управления и преобразования информации, содержащий блок синхронизации, преобразователь кодов и преобразователь время-код, вход которого является информационным входом блока управления и преобразования информации, первый и второй выходы преобразователя кодов подключены соответственно к выходу первого преобразователя угол-код и выходу второго преобразователя угол-код, третий выход подключен к первому выходу преобразователь время-код, синхровыход блока синхронизации подключен к синхровходам аналого-цифрового преобразователя, видеоконтрольного адаптера и блока формирования отсчетов, первый выход которого подключен ко второму входу первого преобразователя угол-код, второй выход подключен ко второму входу второго преобразователя угол-код, устройство селекции подвижных целей, содержащее блок оперативной памяти текущего кадра видеоизображения, первый вход которого подключен к выходу аналого-цифрового преобразователя, блок оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока оперативной памяти текущего кадра видеоизображения, блок вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства регистрации, первый вход подключен ко второму выходу блока оперативной памяти текущего кадра видеоизображения, второй вход - к выходу блока оперативной памяти предыдущего кадра видеоизображения, блок оперативной памяти текущих значений кодов, первый выход которого подключен ко второму входу устройства регистрации, первый вход подключен к выходу преобразователя кодов, блок оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока оперативной памяти текущих значений кодов, блок вычисления относительного сдвига кадров видеоизображений, выход которого подключен к третьему входу блока вычисления разностей кадров видеоизображений, первый вход подключен к третьему выходу блока оперативной памяти текущих значений кодов, второй вход - к выходу блока оперативной памяти предыдущих значений кодов, устройство управления памятью, синхровход которого подключен к синхровыходу блока синхронизации, первый, второй, третий, четвертый, пятый и шестой выходы подключены соответственно ко второму входу блока оперативной памяти текущего кадра видеоизображения, ко второму входу блока оперативной памяти предыдущего кадра видеоизображения, к четвертому входу блока вычисления разностей кадров видеоизображений, к третьему входу блока вычисления относительного сдвига кадров видеоизображений, ко второму входу блока оперативной памяти предыдущих значений кодов, ко второму входу блока оперативной памяти текущих значений кодов, при этом синхровыход устройства преобразователя время-код подключен к синхровходу блока синхронизации (см. №2010132395, G01C 1/06, 10.02.2012).
Известное электронно-цифровое устройство измерения угловых координат с селекцией подвижных объектов наблюдения обеспечивает высокую точность дистанционных измерений угловых координат быстродвижущихся объектов, например летательных аппаратов с селекцией подвижных объектов на общем наблюдаемом фоне.
Однако, известное электронно-цифровое устройство измерения угловых координат с селекцией подвижных объектов наблюдения не позволяет в ходе селекции идентифицировать подвижные цели при наличии нескольких объектов (более 1), поскольку на кадре результирующего изображения присутствуют два изображения каждой движущейся цели - прямое и инверсное, которое запаздывает относительно первого (основного) изображения на время, равное периоду следования кадров. При этом инверсные изображения объектов создают эффект "ложных целей".
Задача предлагаемого изобретения - повышение точности селекции подвижных целей за счет подавления их инверсных (ложных) изображений.
Предлагаемое устройство селекции подвижных целей позволяет повысить точность селекции подвижных целей за счет подавления их инверсных (ложных) изображений.
Для достижения указанного технического результата в устройство селекции подвижных целей, содержащее блок оперативной памяти текущего кадра видеоизображения, первый вход которого подключен к выходу датчика цифрового изображения, блок оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока оперативной памяти текущего кадра видеоизображения, блок вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства регистрации, первый вход подключен ко второму выходу блока оперативной памяти текущего кадра видеоизображения, блок оперативной памяти текущих значений кодов, первый выход которого подключен ко второму входу устройства регистрации, первый вход подключен к выходу блока формирования угловых кодов, блок оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока оперативной памяти текущих значений кодов, блок вычисления относительного сдвига кадров видеоизображений, первый вход подключен к третьему выходу блока оперативной памяти текущих значений кодов, второй вход - к выходу блока оперативной памяти предыдущих значений кодов, устройство управления памятью, синхровход которого подключен к синхровыходу блока синхронизации введен блок вычисления компиляционного кадра, выход которого подключен ко второму входу блока вычисления разностей кадров видеоизображений, первый и второй входы которого соединены соответственно с вторым выходом блока оперативной памяти текущего кадра и выходом блока оперативной памяти предыдущего кадра видеоизображения, третий вход соединен с выходом блока вычисления относительного сдвига кадров видеоизображений, а четвертый вход соединен с выходом устройства управления памятью.
На чертеже (фиг.1) приведена функциональная схема заявляемого устройства селекции подвижных целей (УСП), где:
1 - блок оперативной памяти текущего кадра видеоизображения;
2 - устройство управления памятью;
3 - блок оперативной памяти текущих значений кодов;
4 - блок вычисления компиляционного кадра;
5 - блок оперативной памяти предыдущего кадра видеоизображения;
6 - блок вычисления разностей кадров видеоизображений;
7 - блок вычисления относительного сдвига кадров видеоизображений;
8 - блок оперативной памяти предыдущих значений кодов;
9 - устройство регистрации;
10 - датчик цифрового изображения;
11 - блок синхронизации;
12 - блок формирования угловых кодов.
Устройство селекции подвижных целей (УСП) содержит блок 1 оперативной памяти текущего кадра видеоизображения, первый вход которого соединен с выходом датчика 10 цифрового изображения (или цифрового фотоприемного устройства), блок 5 оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока 1 оперативной памяти текущего кадра видеоизображения, блок 4 вычисления компиляционного кадра, первый и второй входы которого соединены соответственно с вторым выходом блока 1 оперативной памяти текущего кадра и выходом блока 5 оперативной памяти предыдущего кадра видеоизображения, третий - подключен к выходу блока 7 вычисления относительного сдвига кадров видеоизображений, а четвертый вход соединен с выходом устройства 2 управления памятью, блок 6 вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства 9 регистрации, первый вход подключен ко второму выходу блока 1 оперативной памяти текущего кадра видеоизображения, второй вход подключен к выходу блока 4 вычисления компиляционного кадра, блок 3 оперативной памяти текущих значений кодов, первый выход которого подключен ко второму входу устройства 9 регистрации, первый вход подключен к выходу блока 12 формирования угловых кодов, блок 8 оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока 3 оперативной памяти текущих значений кодов, блок 7 вычисления относительного сдвига кадров видеоизображений, выход которого подключен к третьему входу блока 4 вычисления компиляционного кадра, первый вход подключен к третьему выходу блока 3 оперативной памяти текущих значений кодов, второй вход - к выходу блока 8 оперативной памяти предыдущих значений кодов, устройство 2 управления памятью, синхровход которого подключен к синхровыходу блока 11 синхронизации, первый, второй, третий, четвертый, пятый, шестой и седьмой выходы подключены соответственно ко второму входу блока 1 оперативной памяти текущего кадра видеоизображения, ко второму входу блока 5 оперативной памяти предыдущего кадра видеоизображения, к третьему входу блока 6 вычисления разностей кадров видеоизображений, к третьему входу блока 7 вычисления относительного сдвига кадров видеоизображений, ко второму входу блока 8 оперативной памяти предыдущих значений кодов, ко второму входу блока 3 оперативной памяти текущих значений кодов, к четвертому входу блока 4 формирования компиляционного кадра.
Устройство работает следующим образом.
Устройство селекции подвижных целей подключается к датчику цифрового изображения, блоку синхронизации, блоку формирования угловых кодов и устройству регистрации информации. С датчика цифрового изображения поступает последовательность цифровых телевизионных кадров.
До поступления информации очередного кадра информация с блока 1 оперативной памяти текущего кадра видеоизображения переписывается в блок 5 оперативной памяти предыдущего кадра видеоизображения. Синхронно информационная посылка телеметрии с блока 3 оперативной памяти текущих значений кодов переписывается в блок 8 оперативной памяти предыдущих значений кодов.
Очередная посылка информации кадра видеоизображения с датчика 10 цифрового изображения записывается в блок 1 оперативной памяти текущего кадра видеоизображения. Синхронно информационная посылка с источника телеметрии 12 с угловыми кодами и кодом времени записывается в блок 3 оперативной памяти текущих значений кодов. По окончании записи информация с блока 3 оперативной памяти текущих значений кодов и информация с блока 8 оперативной памяти предыдущих значений кодов поступает на блок 7 вычисления относительного сдвига кадров видеоизображений, где вычисляется число строк и число столбцов сдвига кадра видеоизображения при перемещении датчика цифрового изображения, ведущего наблюдение за объектами.
Число строк строк Nv и число столбцов Nh сдвига кадра видеоизображения находятся известным из прототипа образом и записываются в блок 4 вычисления компиляционного кадра.
Элементы компиляционного кадра рассчитываются на основании данных блока 1 оперативной памяти текущего кадра и блока 5 оперативной памяти предыдущего кадра с учетом сдвига кадра по строкам Nv и по столбцам Nh в соответствии с формулой:

где IK(x,y) - элемент компиляционного кадра с координатами x и y;
Ii(x,y) - элемент текущего кадра видеоизображения с координатами x, y из блока памяти 1;
Ii-1(x+Nv, y+Nh) - элемент предыдущего кадра видеоизображения с координатами x, y из блока памяти 5 с учетом сдвига кадра по столбцам и по строкам.
Каждый компиляционный кадр IK состоит из минимальных значений соответствующих пикселей двух последовательных кадров с учетом их сдвига.
В блоке 6 вычисления разностей кадров видеоизображений попиксельно вычитаются данные блока 4 вычисления компиляционного кадра из данных блока 1 оперативной памяти текущего кадра видеоизображения. В результате такого вычитания общий наблюдаемый фон исключается. При этом в прототипе на кадре разностного видеоизображения сохраняется два изображения движущейся цели - прямое и инверсное, запаздывающее относительно первого, которое на последующих этапах обработки затрудняет идентификацию, создавая эффект ложной цели, изображение которой идентично основному. В предлагаемом устройстве селекции подвижных целей за счет вычитания компиляционного кадра инверсного изображения не возникает, что упрощает идентификацию наблюдаемого подвижного объекта.
Кадр разностного видеоизображения из блока 6 вычисления разностей кадров видеоизображений и информация кодов углового положения и времени из блока 3 оперативной памяти текущих значений кодов переписываются, например, в устройство 9 регистрации как показано на чертеже (фиг.1) для дальнейшей обработки, а также может быть использован для формирования управляющего сигнала для системы автоматического сопровождения целей.
Все операции по передаче данных между блоками в составе устройства селекции подвижных целей осуществляются при помощи устройства 2 управления памятью, на вход которого подается сигнал синхронизации.
Предлагаемое устройство селекции подвижных целей позволяет повысить точность селекции подвижных целей за счет подавления их инверсных (ложных) изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство селекции подвижных целей | 2015 |
|
RU2607851C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ С ДИФФЕРЕНЦИАЛЬНОЙ И ИНТЕГРАЛЬНОЙ СЕЛЕКЦИЕЙ ПОДВИЖНЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2014 |
|
RU2561310C1 |
| ЭЛЕКТРОННЫЙ ТЕОДОЛИТ С БЛОКОМ ДИСТАНЦИОННОЙ ОПЕРАТИВНОЙ ОБРАБОТКИ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2010 |
|
RU2437059C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343407C2 |
| Устройство для монтажа магнитной видеозаписи | 1982 |
|
SU1040521A1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343408C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2358240C2 |
| Устройство для монтажа магнитной видеозаписи | 1983 |
|
SU1137530A2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343411C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343410C2 |
Изобретение относится к технике измерений, может использоваться в геодезическом приборостроении и предназначено для использования в составе устройств измерения угловых координат летательных аппаратов.
Известный прототип изобретения не позволяет в ходе селекции идентифицировать подвижные цели при наличии нескольких объектов, поскольку на кадре результирующего изображения присутствуют два изображения каждой движущейся цели - прямое и инверсное, которое запаздывает относительно первого (основного) изображения на время, равное периоду следования кадров. Для устранения инверсных изображений, создающих эффект "ложных целей", в устройство селекции вводится блок вычисления компиляционного кадра. Технический результат предлагаемого устройства селекции подвижных целей - повышение точности селекции подвижных целей за счет подавления их инверсных (ложных) изображений. 1 илл.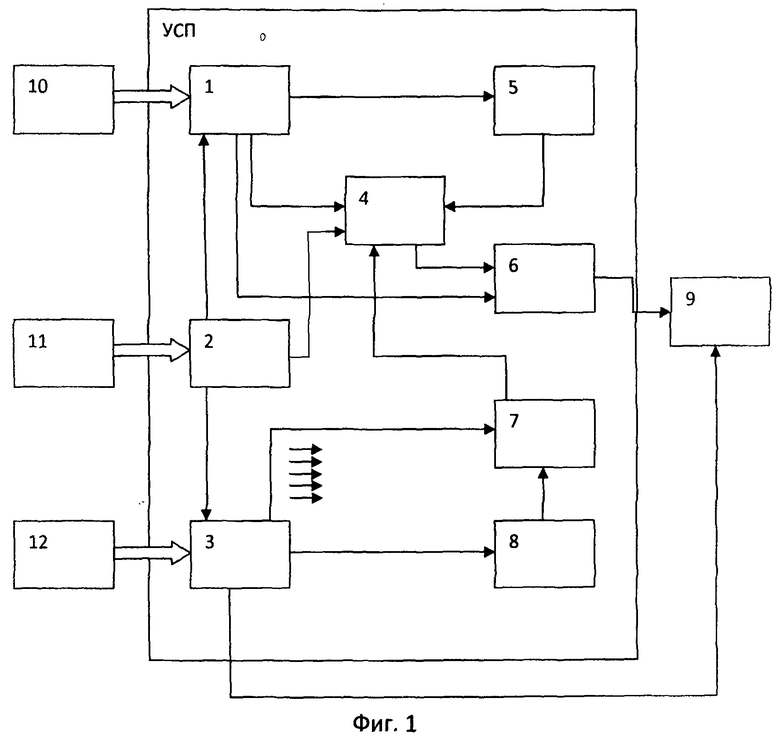
Устройство селекции подвижных целей, содержащее блок оперативной памяти текущего кадра видеоизображения, первый вход которого подключен к выходу датчика цифрового изображения, блок оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока оперативной памяти текущего кадра видеоизображения, блок вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства регистрации, первый вход подключен ко второму выходу блока оперативной памяти текущего кадра видеоизображения, блок оперативной памяти текущих значений кодов, первый выход которого подключен ко второму входу устройства регистрации, первый вход подключен к выходу блока формирования угловых кодов, блок оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока оперативной памяти текущих значений кодов, блок вычисления относительного сдвига кадров видеоизображений, первый вход подключен к третьему выходу блока оперативной памяти текущих значений кодов, второй вход - к выходу блока оперативной памяти предыдущих значений кодов, устройство управления памятью, синхровход которого подключен к синхровыходу блока синхронизации, отличающееся тем, что введен блок вычисления компиляционного кадра, выход которого подключен ко второму входу блока вычисления разностей кадров видеоизображений, первый и второй входы которого соединены соответственно со вторым выходом блока оперативной памяти текущего кадра и выходом блока оперативной памяти предыдущего кадра видеоизображения, третий вход соединен с выходом блока вычисления относительного сдвига кадров, а четвертый вход соединен с выходом устройства управления памятью.
| 2010132395 A, 10.02.2012 | |||
| СПОСОБ ПЕРЕДАЧИ СИГНАЛОВ ПО ДВУМ ПАРАЛЛЕЛЬНЫМ КАНАЛАМ С ИСПОЛЬЗОВАНИЕМ КОДОВОГО РАЗДЕЛЕНИЯ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2214060C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПЕРЕХОДА С ПОСТА НА ПОСТ ПРИ ДЕМОНСТРАЦИИ КИНОФИЛЬМОВ | 0 |
|
SU285495A1 |
| US 4811398 A1, 07.03.1989 | |||
| ВИДЕОДЕКОДЕР С ОБРАБОТКОЙ ПЕРЕМЕЖАЮЩИХСЯ ДАННЫХ | 1997 |
|
RU2204217C2 |

