Изобретение относится к технике измерений, может использоваться в геодезическом приборостроении, и предназначено для использования при измерении угловых координат летательных аппаратов.
Известен электронный теодолит, содержащий пульт управления и объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выходы которых подключены соответственно к первому и второму входам преобразователя угол-код, выход которого соединен с входом цифрового табло [1].
Известный электронный теодолит обеспечивает высокую точность измерения угловых координат и удобство их считывания оператором при геодезических измерениях. Однако известный электронный теодолит не позволяет выполнять дистанционные измерения угловых координат геодезических объектов, поскольку оператор должен находиться в месте установки электронного теодолита, не позволяет селектировать движущиеся объекты на общем наблюдаемом фоне.
Известно электронно-цифровое устройство измерения угловых координат (электронный теодолит) (RU 2316729), содержащее пульт управления и объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выходы которых подключены соответственно к первому и второму входам преобразователя угол-код, выход которого с входом цифрового табло, а также блок синхронизации, видеоконтрольное устройство, видеоконтрольный адаптер, закрепленное в опорно-поворотном устройстве, оптически связанное с объективом канала наблюдения и содержащее матрицу фотодетекторов фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, пульт управления выполнен дистанционным, его первый и второй выходы подключены к управляющим входам соответственно механизмов горизонтального и вертикального наведения, третий и четвертый выходы - к управляющим входам соответственно блока считывания с горизонтального диска и блока считывания с вертикального диска, выход блока синхронизации подключен к синхровходам видеоконтрольного адаптера и устройства считывания информации, электрические выходы которого соединены с входной шиной видеоконтрольного адаптера, выход которого подключен к входу видеоконтрольного устройства.
Известное электронно-цифровое устройство измерения угловых координат (электронный теодолит) обеспечивает высокую точность измерения угловых координат, удобство их считывания и позволяет выполнять дистанционные измерения, поскольку оператор может находиться в месте, удаленном от места установки теодолита.
Однако известное электронно-цифровое устройство измерения угловых координат (электронный теодолит) не позволяет выполнять дистанционные измерения угловых координат быстро движущихся объектов, поскольку за один цикл измерения оператором угловых координат движущегося объекта в одной точке его траектории движения движущийся объект выходит из поля зрения оператора, а также не позволяет селектировать движущиеся объекты на общем наблюдаемом фоне.
Наиболее близким к предлагаемому является известное электронно-цифровое устройство измерения угловых координат (RU 2358240), содержащее пульт управления и объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выход последнего из которых подключен к входу первого преобразователя угол-код, а также видеоконтрольное устройство, видеоконтрольный адаптер, второй преобразователь угол-код, устройство регистрации информации, блок формирования отсчетов, блок управления и преобразования информации, содержащий блок синхронизации, преобразователь кодов и преобразователь время-код, закрепленное в опорно-поворотное устройстве и оптически связанное с объективом канала наблюдения фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, выход и синхровход которого соединены соответственно с информационным входом и синхровходом аналого-цифрового преобразователя, выход которого подключен к первой входной шине устройства регистрации информации, вторая входная шина которого соединена с выходом преобразователя кодов, первый, второй входы которого подключены к выходам соответственно первого преобразователя угол-код, второго преобразователя угол-код и преобразователя время-код, вход которого является информационным входом блока управления и преобразования информации, выход блока синхронизации соединен с синхровходом устройства считывания информации, выход которого соединен с информационным входом видеоконтрольного адаптера, выход которого подключен к входу видеоконтрольного устройства, а синхровход - к выходу блока формирования отсчетов, первый и второй выходы которого подключены к управляющим входам соответственно первого и второго преобразователей угол-код, вход последнего из которых подключен к выходу блока считывания с горизонтального диска, при этом пульт управления выполнен дистанционным, а его первый и второй выходы подключены к управляющим входам соответственно механизмов вертикального и горизонтального наведения.
Известное электронно-цифровое устройство измерения угловых координат обеспечивает высокую точность дистанционных измерений угловых координат быстродвижущихся объектов, например летательных аппаратов.
Однако известное электронно-цифровое устройство измерения угловых координат не позволяет селектировать движущиеся объекты на общем наблюдаемом фоне.
Технический результат предлагаемого электронно-цифрового устройства измерения угловых координат с селекцией подвижных объектов наблюдения - возможность селектировать подвижные объекты на общем наблюдаемом фоне.
Предлагаемый электронно-цифровое устройство измерения угловых координат с селекцией подвижных объектов наблюдения реализован с помощью известных функциональных элементов.
Для достижения указанного технического результата в электронно-цифровое устройство измерения угловых координат, содержащее объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы вертикального и горизонтального наведения которого содержат соответственно вертикальный и горизонтальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с вертикального диска и блок считывания с горизонтального диска, выходы которых подключены соответственно к первому входу первого преобразователя угол-код и к первому входу второго преобразователя угол-код, пульт дистанционного управления, первый и второй выходы которого подключены к управляющим входам соответственно механизмов вертикального и горизонтального наведения, закрепленное в опорно-поворотном устройстве и оптически связанное с объективом канала наблюдения фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, выход которого соединен с информационным входом аналого-цифрового преобразователя, видеоконтрольный адаптер, выход которого соединен с входом видеоконтрольного устройства, а информационный вход соединен с выходом устройства считывания информации, устройство регистрации информации, блок формирования отсчетов, блок управления и преобразования информации, содержащий блок синхронизации, преобразователь кодов и преобразователь время-код, вход которого является информационным входом блока управления и преобразования информации, первый и второй выходы преобразователя кодов подключены соответственно к выходу первого преобразователя угол-код и выходу второго преобразователя угол-код, третий выход подключен к первому выходу преобразователь время-код, синхровыход блока синхронизации подключен к синхровходам аналого-цифрового преобразователя, видеоконтрольного адаптера и блока формирования отсчетов, первый выход которого подключен ко второму входу первого преобразователя угол-код, второй выход подключен ко второму входу второго преобразователя угол-код, введено устройство селекции подвижных целей, содержащее блок оперативной памяти текущего кадра видеоизображения, первый вход которого подключен к выходу аналого-цифрового преобразователя, блок оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока оперативной памяти текущего кадра видеоизображения, блок вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства регистрации, первый вход подключен ко второму выходу блока оперативной памяти текущего кадра видеоизображения, второй вход - к выходу блока оперативной памяти предыдущего кадра видеоизображения, блок оперативной памяти текущих значений кодов, первый выход которого подключен второму входу устройства регистрации, первый вход подключен к выходу преобразователя кодов, блок оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока оперативной памяти текущих значений кодов, блок вычисления относительного сдвига кадров видеоизображений, выход которого подключен к третьему входу блока вычисления разностей кадров видеоизображений, первый вход подключен к третьему выходу блока оперативной памяти текущих значений кодов, второй вход - к выходу блока оперативной памяти предыдущих значений кодов, блок суммирования разностей кадров видеоизображений, вход которого соединен с выходом блока вычисления разностей кадров видеоизображений, а выход соединен с третьим входом устройства регистрации, устройство управления памятью, синхровход которого подключен к синхровыходу блока синхронизации, первый, второй, третий, четвертый, пятый, шестой выходы подключены соответственно ко второму входу блока оперативной памяти текущего кадра видеоизображения, ко второму входу блока оперативной памяти предыдущего кадра видеоизображения, к четвертому входу блока вычисления разностей кадров видеоизображений, к третьему входу блока вычисления относительного сдвига кадров видеоизображений, ко второму входу блока оперативной памяти предыдущих значений кодов, к второму входу блока оперативной памяти текущих значений кодов, при этом синхровыход устройства преобразователя время-код подключен к синхровходу блока синхронизации.
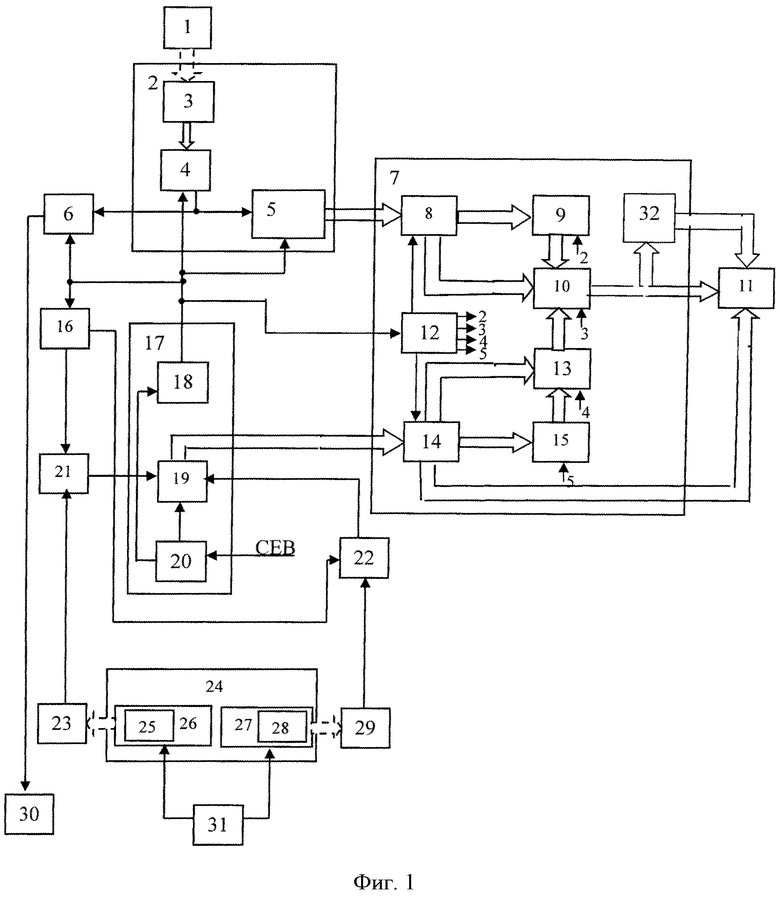
На чертеже (фигура 1) приведена функциональная схема заявляемого электронного теодолита с селекцией подвижных объектов наблюдения.
Электронно-цифровое устройство измерения угловых координат с селекцией подвижных объектов наблюдения содержит объектив 1 канала наблюдения, установленный на опорно-поворотном устройстве 24, оптически связанное с объективом 1 канала наблюдения фотоприемное устройство 2 канала наблюдения, механизмы вертикального 26 и горизонтального 27 наведения опорно-поворотного устройства 24, видеоконтрольный адаптер 6, видеоконтрольное устройство 30, блок формирования отсчетов 16, блок управления и преобразования информации 17, устройство регистрации (11), пульт 31 дистанционного управления, а также устройство селекции подвижных целей 7. Фотоприемное устройство 2 канала наблюдения выполнено в виде матрицы 3 фотодетекторов (пикселей), выходы которых соединены с входной шиной устройства 4 считывания информации, выход которого соединен с информационным входом аналого-цифрового преобразователя 5. Механизмы вертикального 26 и горизонтального 27 наведения опорно-поворотного устройства 24 содержат соответственно вертикальный 25 и горизонтальный 28 диски с кодовыми дорожками, оптически связанные с ними соответственно блок 23 считывания с вертикального диска и блок 29 считывания с горизонтального диска, выходы которых подключены соответственно к первому входу первого преобразователя 21 угол-код и к первому входу второго преобразователя 22 угол-код. Блок 17 управления и преобразования информации содержит блок 18 синхронизации, преобразователь кодов 19 и преобразователь время-код 20, вход которого является информационным входом блока управления и преобразования информации 17, синхровыход преобразователя время-код 20 соединен с синхровходом блока 18 синхронизации, первый и второй входы преобразователя кодов 19 подключены соответственно к выходу первого преобразователя угол-код 21 и выходу второго преобразователя угол-код 22, третий вход подключен к первому выходу преобразователь время-код 20, синхровыход блока синхронизации 18 подключен к синхровходу аналого-цифрового преобразователя 5, синхровходу видеоконтрольного адаптера 6, синхровходу устройства 12 управления памятью и синхровходу блока 16 формирования отсчетов, первый выход которого подключен ко второму входу первого преобразователя 21 угол-код, второй выход подключен ко второму входу второго преобразователя 22 угол-код. Выход видеоконтрольного адаптера 6 соединен с входом видеоконтрольного устройства 30, а информационный вход соединен с выходом устройства 4 считывания информации. Первый и второй выходы пульта 31 дистанционного управления подключены к управляющим входам соответственно механизмов вертикального 26 и горизонтального 27 наведения. Устройство 7 селекции подвижных целей содержит блок 8 оперативной памяти текущего кадра видеоизображения, первый вход которого подключен к выходу аналого-цифрового преобразователя 5, блок 9 оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока 8 оперативной памяти текущего кадра видеоизображения, блок 10 вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства 11 регистрации, первый вход подключен ко второму выходу блока 8 оперативной памяти текущего кадра видеоизображения, второй вход - к выходу блока 9 оперативной памяти предыдущего кадра видеоизображения, блок 32 суммирования разностей кадров видеоизображений, вход которого соединен с выходом блока 10 вычисления разностей кадров видеоизображений, а выход соединен с третьим входом устройства регистрации 11, блок 14 оперативной памяти текущих значений кодов, первый выход которого подключен ко второму входу устройства 11 регистрации, первый вход подключен к выходу преобразователя кодов 19, блок 15 оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока 14 оперативной памяти текущих значений кодов, блок 13 вычисления относительного сдвига кадров видеоизображений, выход которого подключен к третьему входу блока 10 вычисления разностей кадров видеоизображений, первый вход подключен к третьему выходу блока 14 оперативной памяти текущих значений кодов, второй вход - к выходу блока 15 оперативной памяти предыдущих значений кодов, устройство 12 управления памятью, синхровход которого подключен к синхровыходу блока 18 синхронизации, первый, второй, третий, четвертый, пятый и шестой выходы подключены соответственно ко второму входу блока 8 оперативной памяти текущего кадра видеоизображения, ко второму входу блока 9 оперативной памяти предыдущего кадра видеоизображения, к четвертому входу блока 10 вычисления разностей кадров видеоизображений, к третьему входу блока 13 вычисления относительного сдвига кадров видеоизображений, ко второму входу блока 15 оперативной памяти предыдущих значений кодов, ко второму входу блока 14 оперативной памяти текущих значений кодов.
Устройство работает следующим образом.
Электронно-цифровое устройство измерения угловых координат с селекцией подвижных объектов наблюдения устанавливают и горизонтируют в точке стояния. Видеоконтрольное устройство 30, пульт дистанционного управления 31 размещают на необходимом для решения задачи измерений расстоянии в месте нахождения оператора. Устройство 7 селекции подвижных целей и устройство 11 регистрации могут размещаться либо непосредственно на теодолите, либо в месте нахождения оператора.
Работа электронно-цифрового устройства измерения угловых координат без устройства 7 селекции подвижных объектов и устройства 11 регистрации информации работает известным из прототипа образом.
Работа электронно-цифрового устройства измерения угловых координат совместно с устройством 7 селекции подвижных объектов и устройством 11 регистрации информации осуществляется следующим образом.
Изображение объекта наблюдения - движущейся цели - проектируется через объектив 1 канала наблюдения на матрицу 3 фотодетекторов фотоприемного устройства 2 канала наблюдения. Изображение цели наблюдается на общем наблюдаемом фоне. Перемещение изображения цели на матрице фотодетекторов 3 является результирующим двух угловых перемещений: движущейся цели и двигающегося объектива 1 канала наблюдения, движение которого задается оператором с помощью механизмов вертикального 26 и горизонтального 27 наведения опорно-поворотного устройства 24. Перемещение изображения общего наблюдаемого фона на матрице 3 фотодетекторов является результатом движения только объектива 1.
Электрический сигнал видеоизображения цели и общего наблюдаемого фона с матрицы 3 фотодетекторов считывается с помощью устройства 4 считывания информации, входящего в состав фотоприемного устройства 2. Преобразованный сигнал видеоизображения аналого-цифровым преобразователем 5 поступает на блок оперативной памяти текущего кадра видеоизображения 8 устройства 7 селекции подвижных объектов, где в цифровой форме построчно запоминается в объеме одного видеокадра. Время экспозиции существенно меньше периода следования кадра, задаваемого блоком синхронизации 18. Время считывания информации меньше периода следования кадра.
Синхронно этому процессу цифровые данные углового перемещения объектива по вертикали и горизонтали и код времени поступают с преобразователя кодов 19 на блок 14 оперативной памяти текущих значений кодов устройства 7 селекции подвижных объектов.
Работа устройства 7 селекции подвижных объектов осуществляется в дифференциальном и интегральном режимах. Для их реализации до поступления информации очередного кадра информация с блока 8 оперативной памяти текущего кадра видеоизображения переписывается с помощью устройства 12 управления памятью в блок 9 оперативной памяти предыдущего кадра видеоизображения. Синхронно информационная посылка - цифровые данные углового перемещения объектива и код времени - с блока 14 оперативной памяти текущих значений кодов переписывается с помощью устройства 12 управления памятью в блок 15 оперативной памяти предыдущих значений кодов.
Все перемещения информации осуществляются по сигналам устройства 12 управления памятью.
Очередная посылка информации кадра видеоизображения записывается в блок 8 оперативной памяти текущего кадра видеоизображения. Синхронно информационная посылка с цифровыми данными углового перемещения объектива и кодом времени записываются в блок 14 оперативной памяти текущих значений кодов. По окончании записи информация с блока 14 оперативной памяти текущих значений кодов и информация с блока 15 оперативной памяти предыдущих значений кодов поступает на блок 13 вычисления относительного сдвига кадров видеоизображений, где вычисляется число строк и число столбцов сдвига кадра видеоизображения за счет движения объектива 1.
Число строк Nv и число столбцов Nh сдвига кадра находится по следующим формулам


где Δβ, Δα - разность измерений углового положения визирной линии объектива соответственно по вертикали и горизонтали;
βpv, αph - разрешающая способность матрицы фотодетекторов соответственно по вертикали и горизонтали.
βpv, αph находятся из формул
где Lpv и Lph размеры по вертикали и горизонтали фоточувствительной поверхности фотодетектров;
f - фокусное расстояние объектива;
k - число угловых секунд в радиане k=206265.
Вычисленные значения Nv и Nh записываются в блок 10 вычисления разностей кадров видеоизображений.
В блоке 10 вычисления разностей кадров видеоизображений попиксельно вычитаются данные блока 9 оперативной памяти предыдущего кадра видеоизображения из данных блока 8 оперативной памяти текущего кадра видеоизображения с учетом сдвига кадра по строкам Nv и по столбцам Nh. В результате такого вычитания общий наблюдаемый фон исключается. На кадре разностного видеоизображения сохранятся два изображения движущейся цели - прямое и инверсное, которое запаздывает относительно первого на время, равное периоду следования кадров. Кадр разностного видеоизображения из блока 10 вычисления разностей кадров видеоизображений переписывается в устройство 11 регистрации по первому информационному входу. По второму информационному входу переписывается информация кодов углового положения оптической оси объектива 1 и код времени. Для обеспечения синхронности информационных посылок сигнал синхронизации из преобразователя время-код 20 по синхровыходу поступает на синхровход блока 18 синхронизации. Для повышения надежности селекции цели на блоке 32 разностные кадры суммируются на текущем ограниченном отрезке времени и записываются в устройство 11 регистрации. На обобщенном кадре фон наблюдения по-прежнему будет отсутствовать, случайные остатки разностей кадров будут равномерно распределены в зоне наблюдения. Данные объекта наблюдения сосредотачиваются на траекториях вокруг центральной точки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЕЛЕКЦИИ ПОДВИЖНЫХ ЦЕЛЕЙ | 2013 |
|
RU2526890C1 |
| Устройство селекции подвижных целей | 2015 |
|
RU2607851C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343411C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343408C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343410C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343409C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343407C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ БЫСТРО ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2324199C1 |
| ЭЛЕКТРОННЫЙ ТЕОДОЛИТ С БЛОКОМ ДИСТАНЦИОННОЙ ОПЕРАТИВНОЙ ОБРАБОТКИ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2010 |
|
RU2437059C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2358240C2 |
Электронно-цифровое устройство относится к технике измерений, может использоваться в геодезическом приборостроении для измерения угловых координат летательных аппаратов. Данное устройство содержит: объектив канала наблюдения, опорно-поворотное устройство, фотоприемное устройство канала наблюдения, матрицу фотодетекторов, устройство считывания информации и аналого-цифровой преобразователь, механизмы вертикального и горизонтального наведения, вертикальный и горизонтальный диски с кодовыми дорожками, блок считывания с вертикального диска и блок считывания с горизонтального диска, первый преобразователь угол-код и второй преобразователь угол-код, видеоконтрольный адаптер, видеоконтрольное устройство, блок формирования отсчетов, блок управления и преобразования информации, блок синхронизации, преобразователь кодов и преобразователь время-код, устройство регистрации, пульт дистанционного управления, а также устройство селекции подвижных целей, содержащее блок оперативной памяти текущего кадра видеоизображения, блок оперативной памяти предыдущего кадра видеоизображения, блок вычисления разностей кадров видеоизображений, блок оперативной памяти текущего кадра видеоизображения, блок суммирования разностей кадров видеоизображений, устройство регистрации, блок оперативной памяти текущих значений кодов, блок оперативной памяти предыдущих значений кодов, блок вычисления относительного сдвига кадров видеоизображений, устройство управления памятью, связанные соответствующим образом. Технический результат - возможность селектировать подвижные объекты на общем наблюдаемом фоне. 1 ил.
Электронно-цифровое устройство измерения угловых координат, содержащее объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы вертикального и горизонтального наведения которого содержат соответственно вертикальный и горизонтальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с вертикального диска и блок считывания с горизонтального диска, выходы которых подключены соответственно к первому входу первого преобразователя угол-код и к первому входу второго преобразователя угол-код, пульт дистанционного управления, первый и второй выходы которого подключены к управляющим входам соответственно механизмов вертикального и горизонтального наведения, закрепленное в опорно-поворотном устройстве и оптически связанное с объективом канала наблюдения фотоприемное устройство канала наблюдения, выполненное в виде матрицы фотодетекторов, выходы которых соединены с входной шиной устройства считывания информации, выход которого соединен с информационным входом аналого-цифрового преобразователя, видеоконтрольный адаптер, выход которого соединен с входом видеоконтрольного устройства, а информационный вход соединен с выходом устройства считывания информации, устройство регистрации информации, блок формирования отсчетов, блок управления и преобразования информации, содержащий блок синхронизации, преобразователь кодов и преобразователь время-код, вход которого является информационным входом блока управления и преобразования информации, первый и второй выходы преобразователя кодов подключены соответственно к выходу первого преобразователя угол-код и выходу второго преобразователя угол-код, третий выход подключен к первому выходу преобразователь время-код, синхровыход блока синхронизации подключен к синхровходам аналого-цифрового преобразователя, видеоконтрольного адаптера и блока формирования отсчетов, первый выход которого подключен ко второму входу первого преобразователя угол-код, второй выход подключен ко второму входу второго преобразователя угол-код, отличающееся тем, что введено устройство селекции подвижных целей, содержащее блок оперативной памяти текущего кадра видеоизображения, первый вход которого подключен к выходу аналого-цифрового преобразователя, блок оперативной памяти предыдущего кадра видеоизображения, первый вход которого подключен к первому выходу блока оперативной памяти текущего кадра видеоизображения, блок вычисления разностей кадров видеоизображений, выход которого подключен к первому входу устройства регистрации, первый вход подключен ко второму выходу блока оперативной памяти текущего кадра видеоизображения, второй вход - к выходу блока оперативной памяти предыдущего кадра видеоизображения, блок оперативной памяти текущих значений кодов, первый выход которого подключен ко второму входу устройства регистрации, первый вход подключен к выходу преобразователя кодов, блок оперативной памяти предыдущих значений кодов, первый вход которого подключен ко второму выходу блока оперативной памяти текущих значений кодов, блок вычисления относительного сдвига кадров видеоизображений, выход которого подключен к третьему входу блока вычисления разностей кадров видеоизображений, первый вход подключен к третьему выходу блока оперативной памяти текущих значений кодов, второй вход - к выходу блока оперативной памяти предыдущих значений кодов, блок суммирования разностей кадров видеоизображений, вход которого соединен с выходом блока вычисления разностей кадров видеоизображений, а выход соединен с третьим входом устройства регистрации, устройство управления памятью, синхровход которого подключен к синхровыходу блока синхронизации, первый, второй, третий, четвертый, пятый, шестой выходы подключены соответственно ко второму входу блока оперативной памяти текущего кадра видеоизображения, ко второму входу блока оперативной памяти предыдущего кадра видеоизображения, к четвертому входу блока вычисления разностей кадров видеоизображений, к третьему входу блока вычисления относительного сдвига кадров видеоизображений, ко второму входу блока оперативной памяти предыдущих значений кодов, ко второму входу блока оперативной памяти текущих значений кодов, при этом синхровыход устройства преобразователя время-код подключен к синхровходу блока синхронизации.
| RU 2010132395 А, 10.02.2012 | |||
| Способ предохранения стальных деталей от задиров при вытяжке | 1956 |
|
SU106399A1 |
| Электронный теодолит | 1988 |
|
SU1610272A1 |
| US 0006310644 B1, 30.10.2001 | |||

