ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет настоящего изобретения заявляется по дате подачи предварительной заявки на патент США №61/110609, поданной 3 ноября 2008 г., на которой основана настоящая заявка и все содержимое которой для всех целей включено в настоящий документ посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Многие виды тренажерного оборудования включают тяговые рукоятки, соединенные с тросами, грузами и другими формами сопротивления. Пользователь, как правило, захватывает тяговую рукоятку, чтобы поднять груз, потянуть трос или совершить иное движение, противодействующее сопротивлению. Проблема с существующими тяговыми рукоятками состоит в том, что они имеют фиксированную точку крепления к источнику сопротивления и поэтому имеют ограниченный диапазон подвижности и не учитывают поворот ладони пользователя, запястья и/или руки (или стопы, лодыжки и/или ноги), когда пользователь растягивается в движении, выполняя определенное упражнение. Это может создавать неестественное напряжение, действующее на суставы пользователя, связки и/или сухожилия, что может привести к травме. Это также ограничивает вид упражнений, которые могут быть выполнены с помощью рукоятки.
Эти проблемы возникают с одиночными тяговыми рукоятками, которые пользователь может держать в одной руке, а также при упражнении с перекладиной, которые используются в тяге сверху или в других подобных упражнениях, где одновременно в обеих руках пользователя используются две тяговые рукоятки.
Ввиду всего сказанного выше, существует потребность в тяговой рукоятке, которая решает вышеупомянутые описанные проблемы, такие как снятие неестественного напряжения, действующего на суставы пользователя в момент выполнения упражнения. Существует также потребность в различных способах выполнения упражнений, которые могут выполняться с одной или несколькими тяговыми рукоятками, которые решают эти проблемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является выполнение тяговой рукоятки, которая эргономично выполнена с обеспечением отсутствия неестественной нагрузки на тело пользователя во всем диапазоне движений. Другой целью является обеспечение пользователю возможности выполнять упражнения, которые невозможно выполнить с существующими рукоятками или это сделать очень трудно. Эти цели достигаются путем создания одной или нескольких осей поворота или гибкости в тяговой рукоятке так, чтобы ладонь пользователя, запястье и/или рука (или стопа, лодыжка и/или нога) сгибались и/или поворачивались более естественно во всем диапазоне движений пользователя.
Эргономичная тяговая рукоятка, выполненная в соответствии с изобретением, используется с различным тренажерным оборудованием. Например, эргономичная тяговая рукоятка может быть присоединена или прикреплена к концу любого типа перекладин, например штанге, перекладине для подтягивания, перекладине для тяги вниз на высоком блоке и т.д., или составлять их часть. Эргономичная тяговая рукоятка, выполненная в соответствии с изобретением, может также быть прикреплена к концам тросов, которые тянет пользователь.
Эргономичная тяговая рукоятка, выполненная в соответствии с изобретением, также подходит для другого использования, помимо тренажерного оборудования. Например, она может использоваться в качестве рукоятки, прикрепляемой к концу троса для газонокосилки, или для любого другого применения, при котором человек прилагает усилия во всем диапазоне движений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой вид в аксонометрии тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
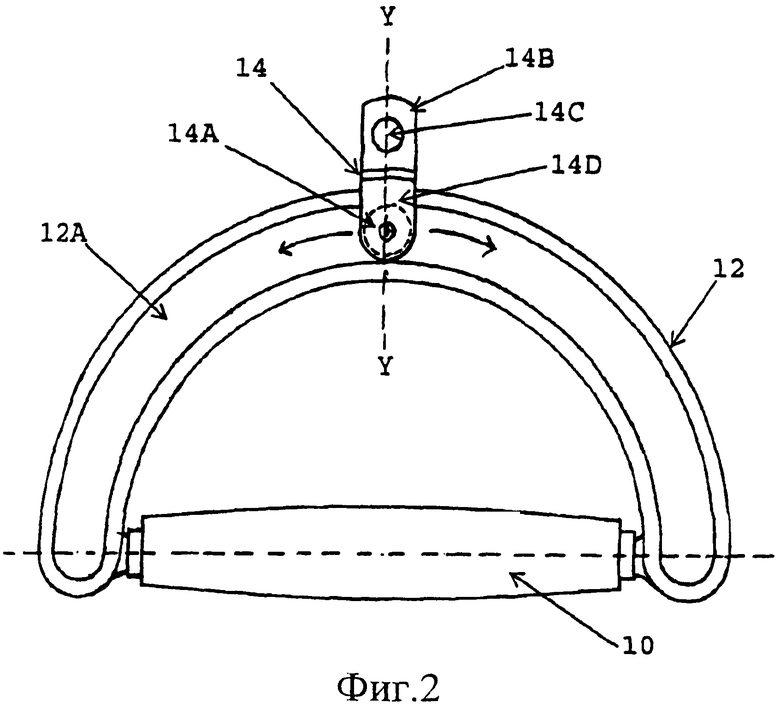
Фиг.2 представляет собой вид сбоку тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
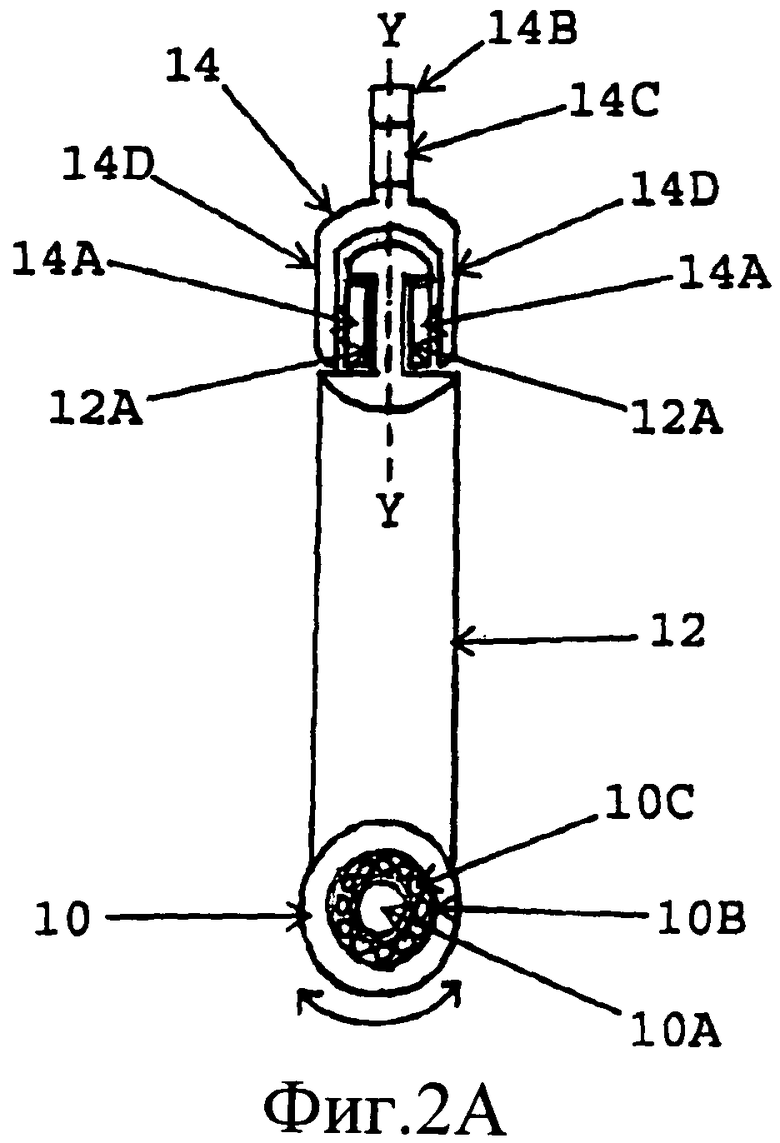
Фиг.2А представляет собой вид с конца тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
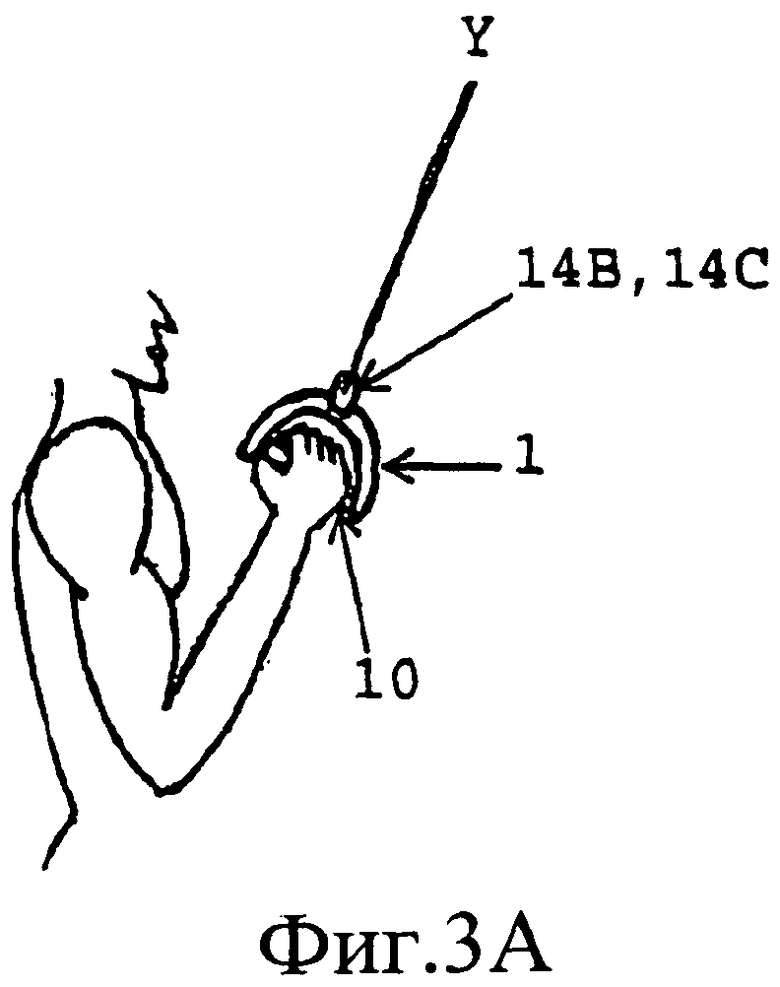
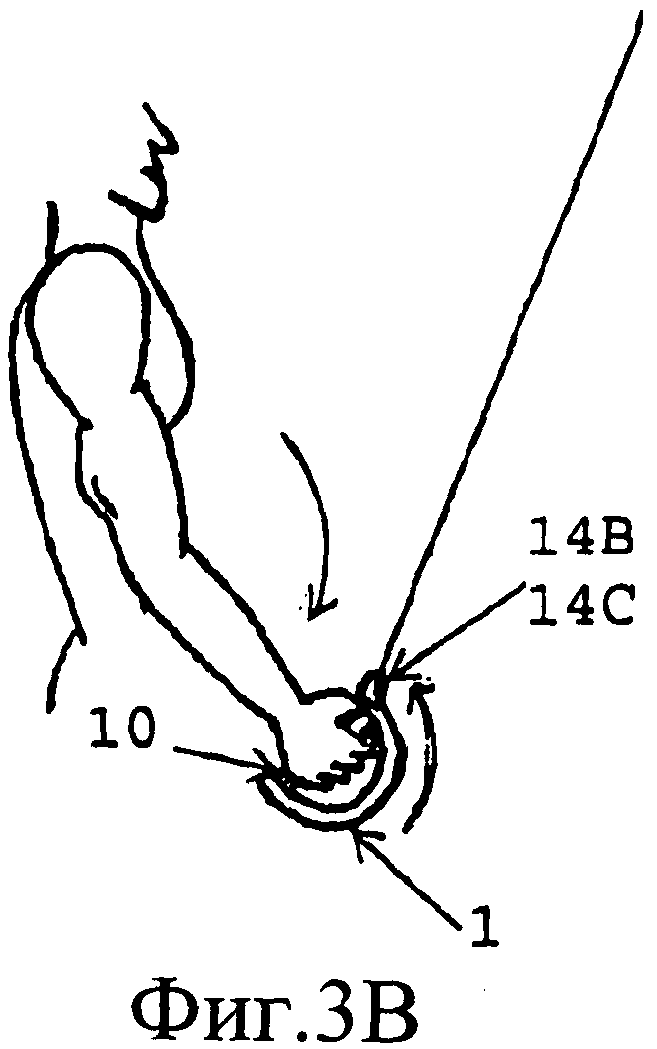
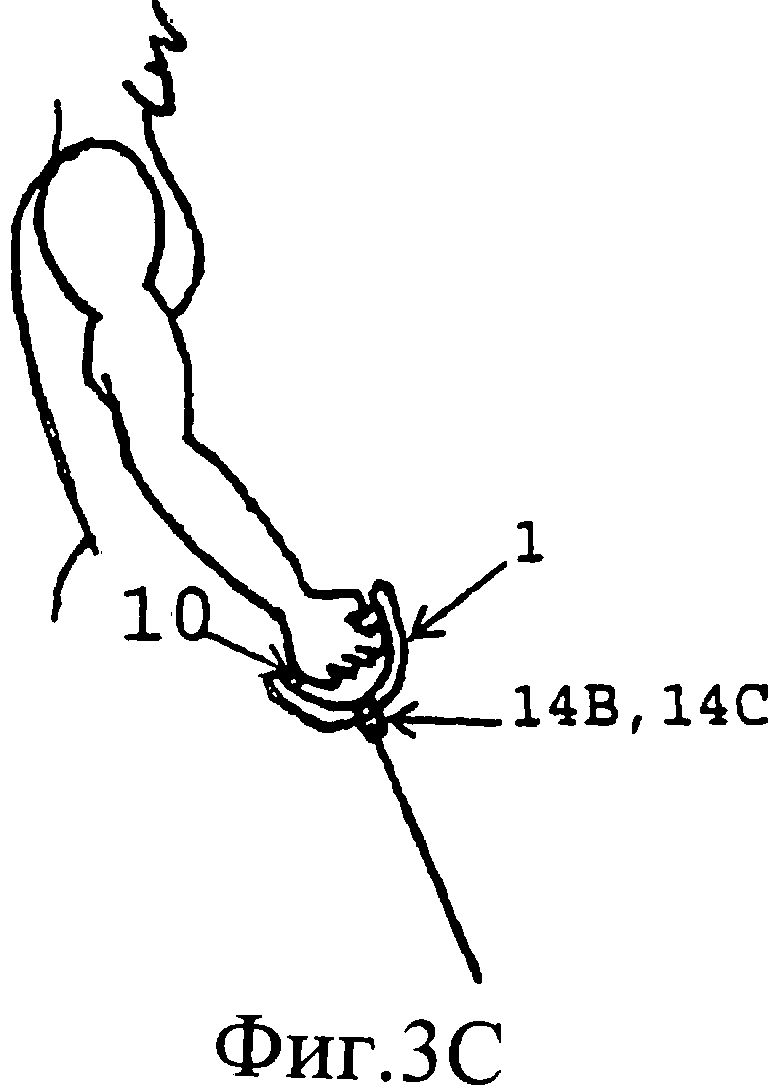
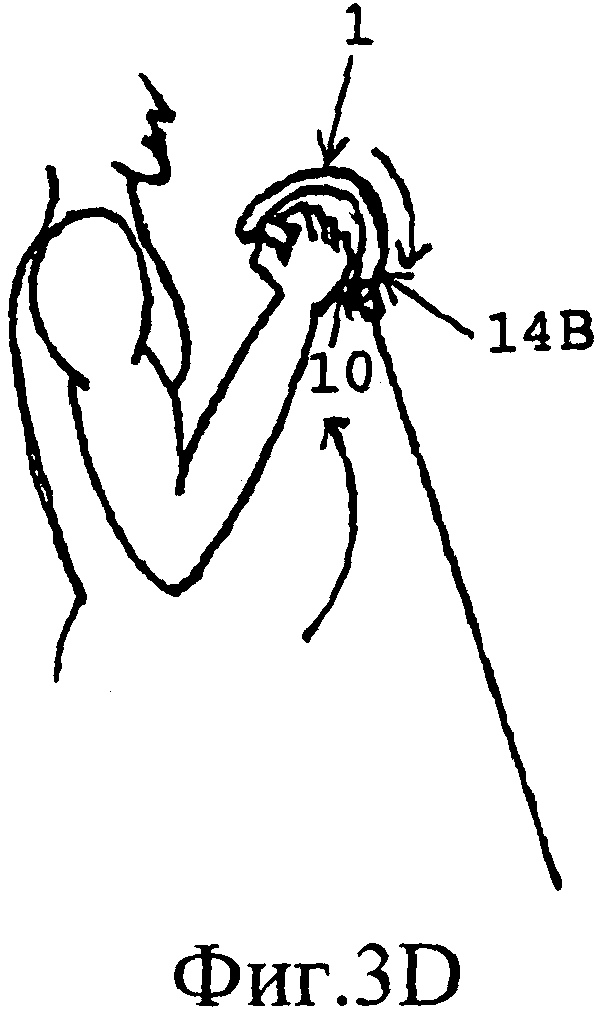
Фиг.3А-3D изображает тяговую рукоятку, выполненную в соответствии с настоящим изобретением, используемую в упражнении на трицепс.
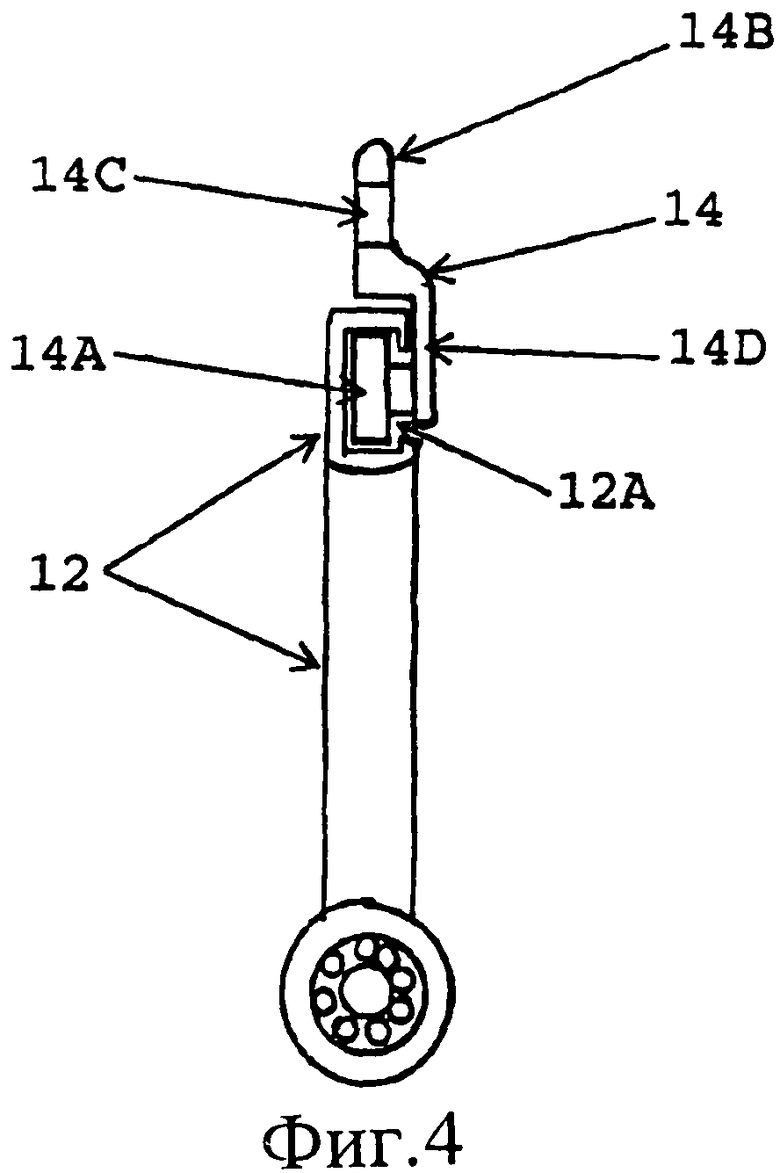
Фиг.4 представляет собой вид сбоку альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
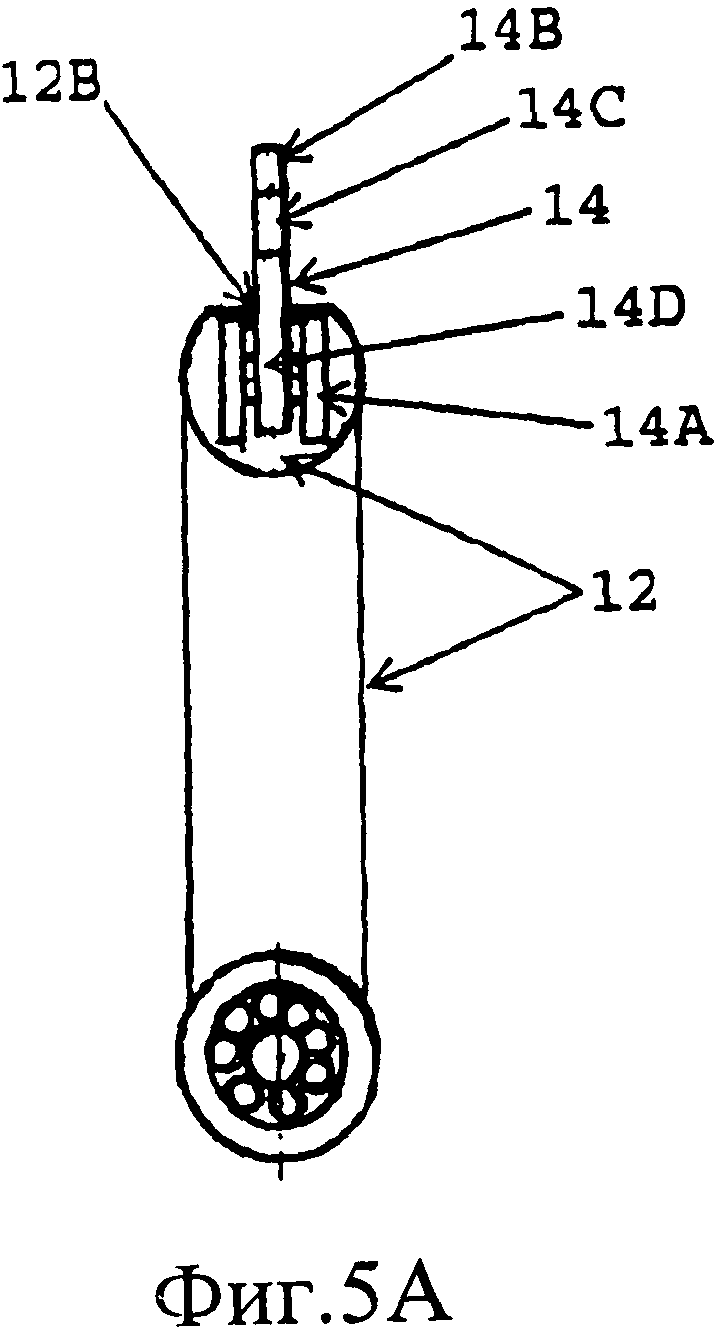
Фиг.5А представляет собой вид с конца альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
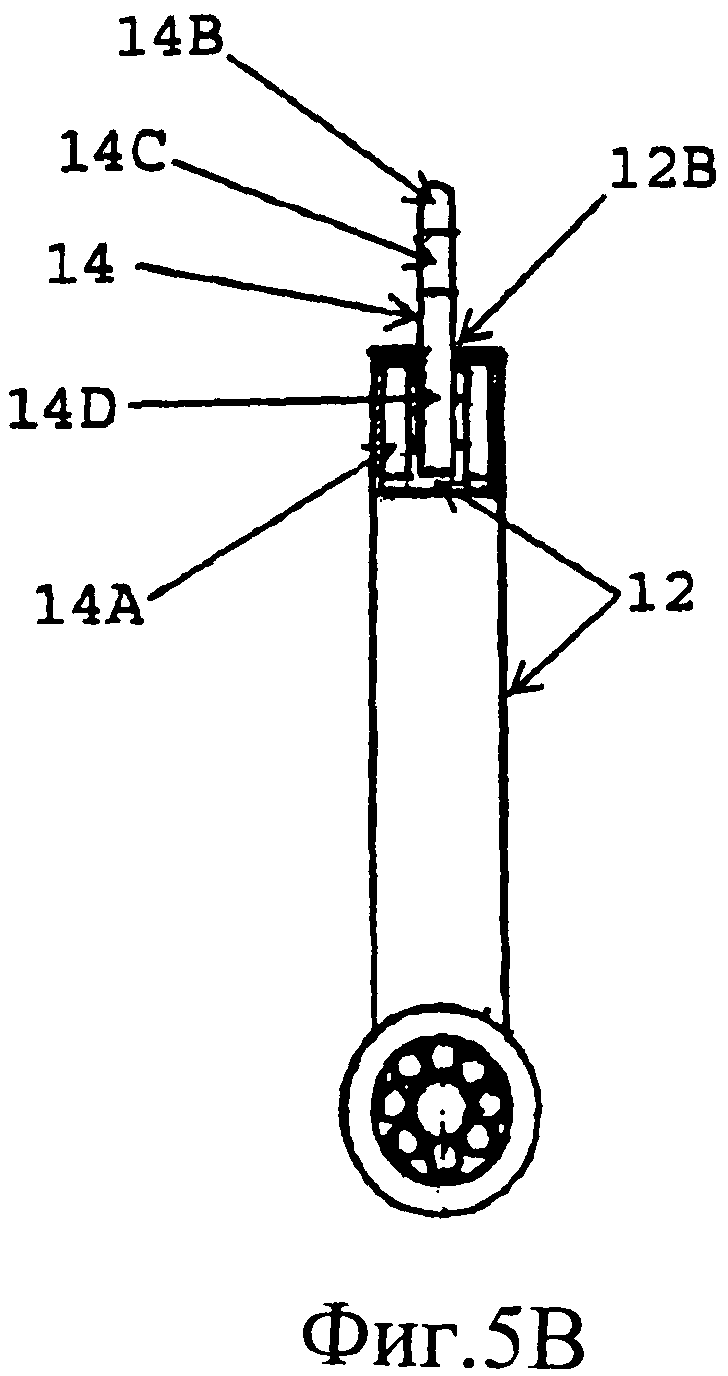
Фиг.5В представляет собой вид с конца альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
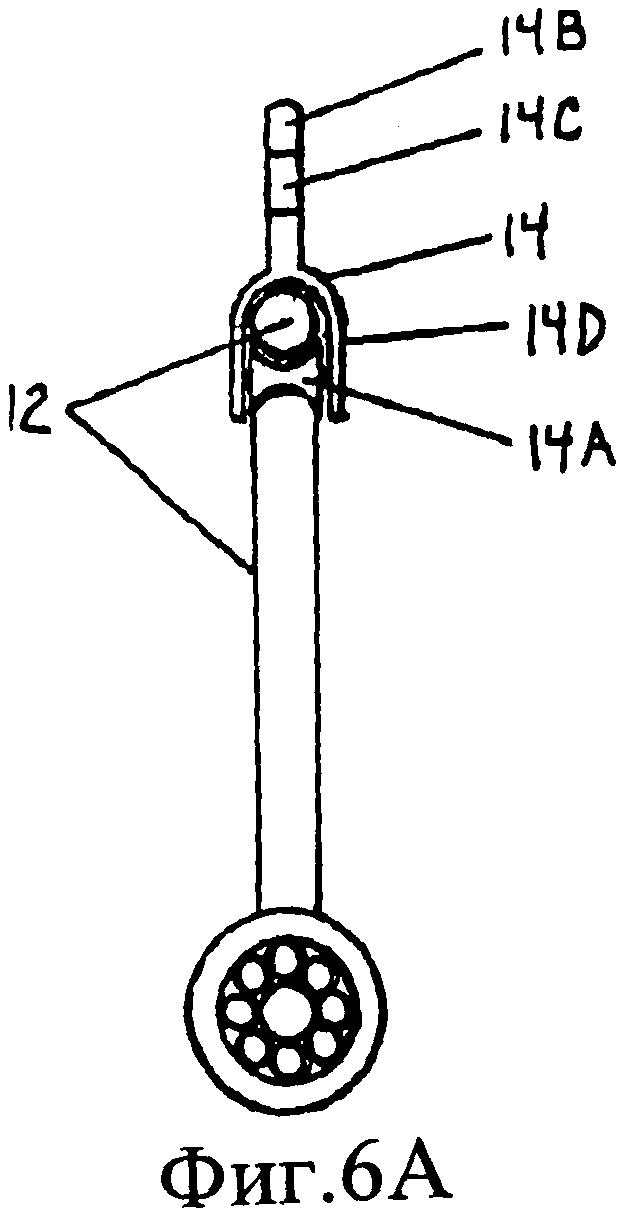
Фиг.6А представляет собой вид с конца альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
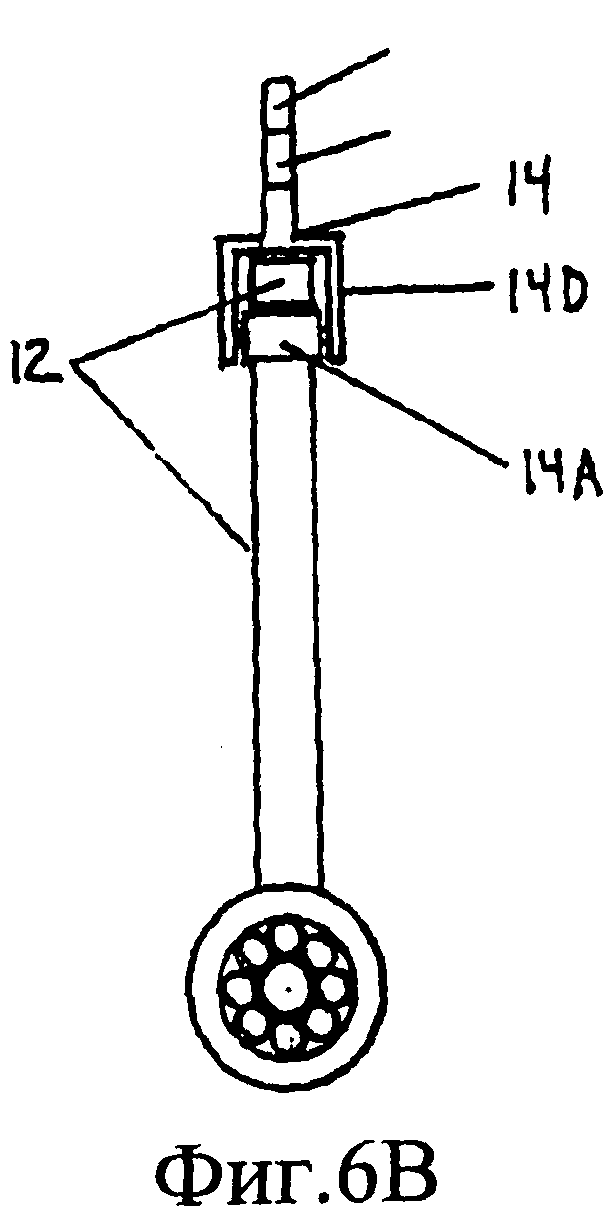
Фиг.6В представляет собой вид с конца альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
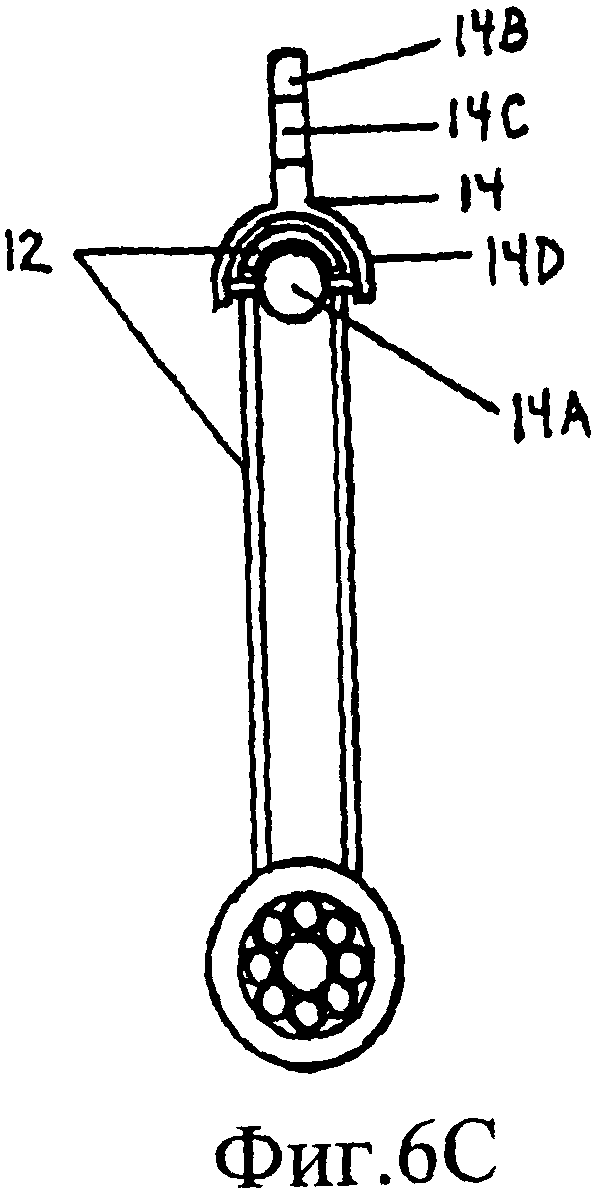
Фиг.6С представляет собой вид с конца альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
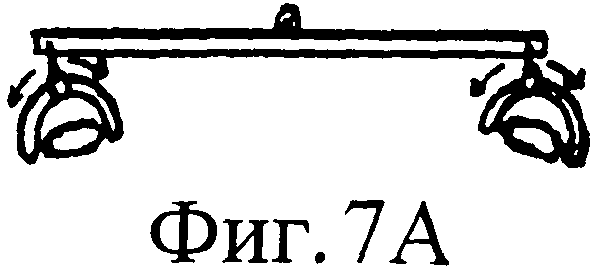
Фиг.7А представляет собой вид сбоку перекладины для выполнения упражнений, в соответствии с настоящим изобретением, имеющей тяговые рукоятки.
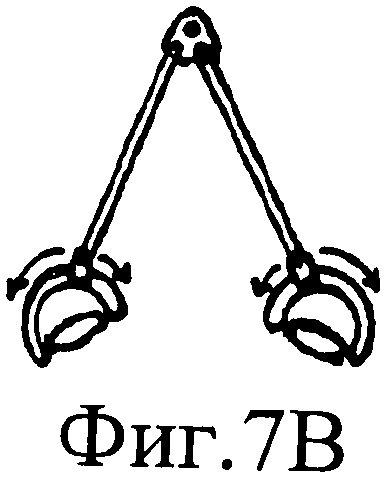
Фиг.7В представляет собой вид сбоку альтернативной перекладины для выполнения упражнений, в соответствии с настоящим изобретением, имеющей тяговые рукоятки.
Фиг.7С представляет собой вид сбоку альтернативной перекладины для выполнения упражнений, в соответствии с настоящим изобретением, имеющей альтернативные скобы для присоединения к перекладине для подтягивания или выполнения других упражнений тяги.
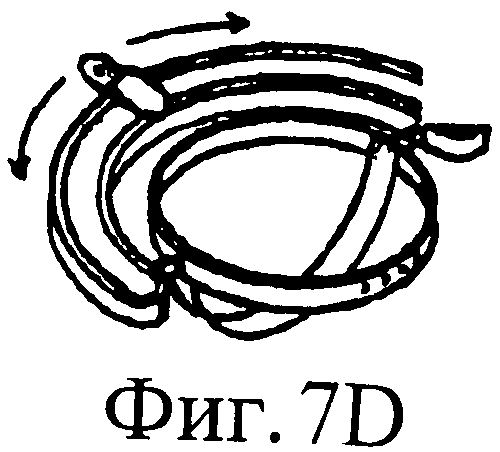
Фиг.7D представляет собой вид в аксонометрии настоящего изобретения, имеющего оснастку для крепления к ноге или лодыжке.
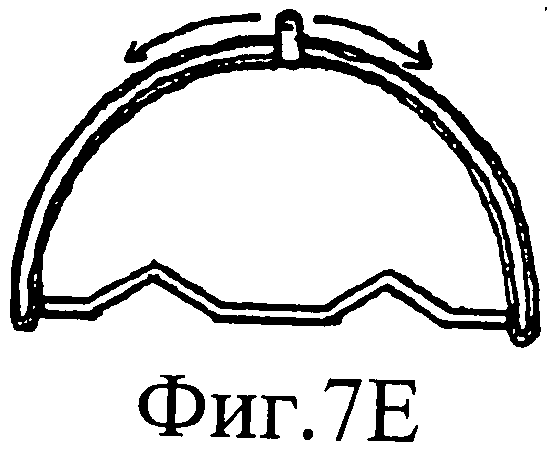
Фиг.7Е представляет собой вид сбоку настоящего изобретения, с большим диаметром направляющей и альтернативной перекладиной для использования двумя руками.
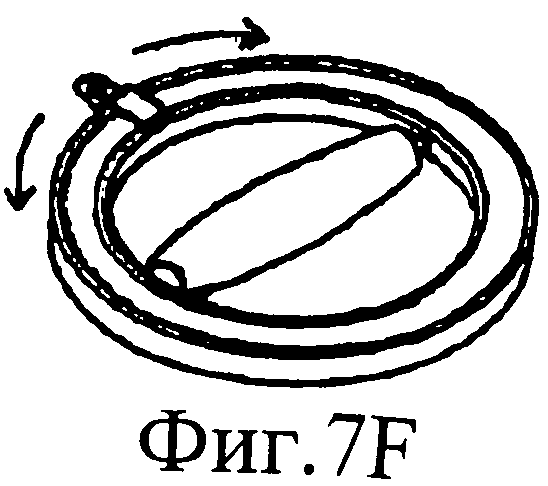
Фиг.7F представляет собой вид в аксонометрии альтернативной тяговой рукоятки, выполненной в соответствии с настоящим изобретением.
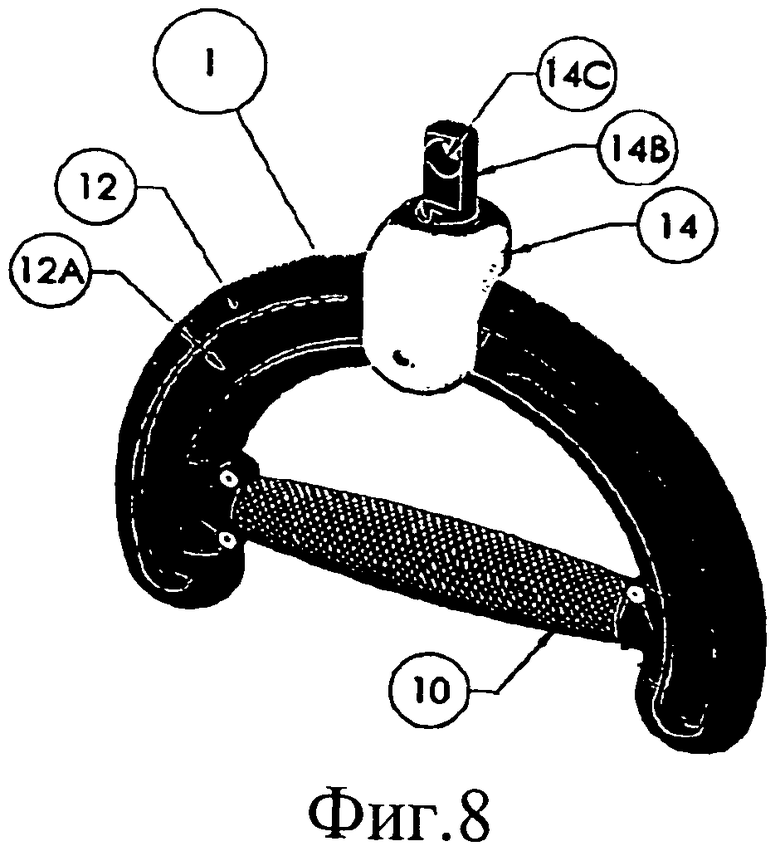
Фиг.8 представляет собой вид в аксонометрии предпочтительного варианта выполнения настоящего изобретения.
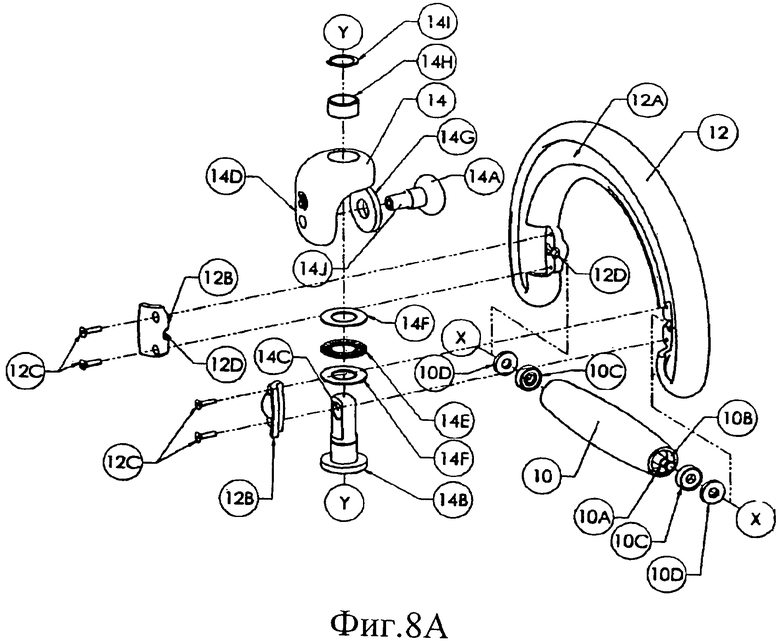
Фиг.8А представляет собой сборочный чертеж тяговой рукоятки, представленной на Фиг.8.
Фиг.8В представляет собой вид сверху тяговой рукоятки, изображенной на Фиг.8.
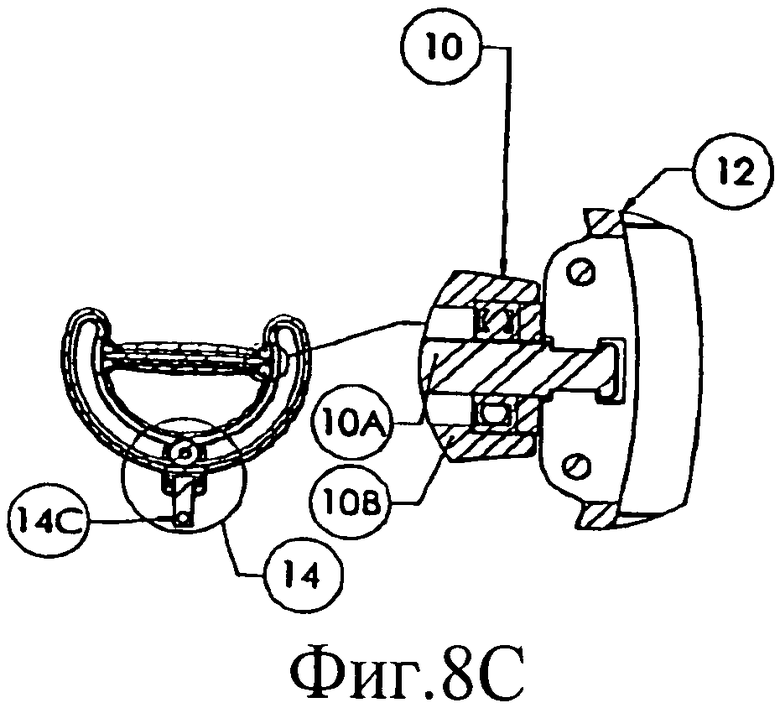
Фиг.8С представляет собой подробный вид в сечении соединения между стержнем, рукояткой и направляющей.
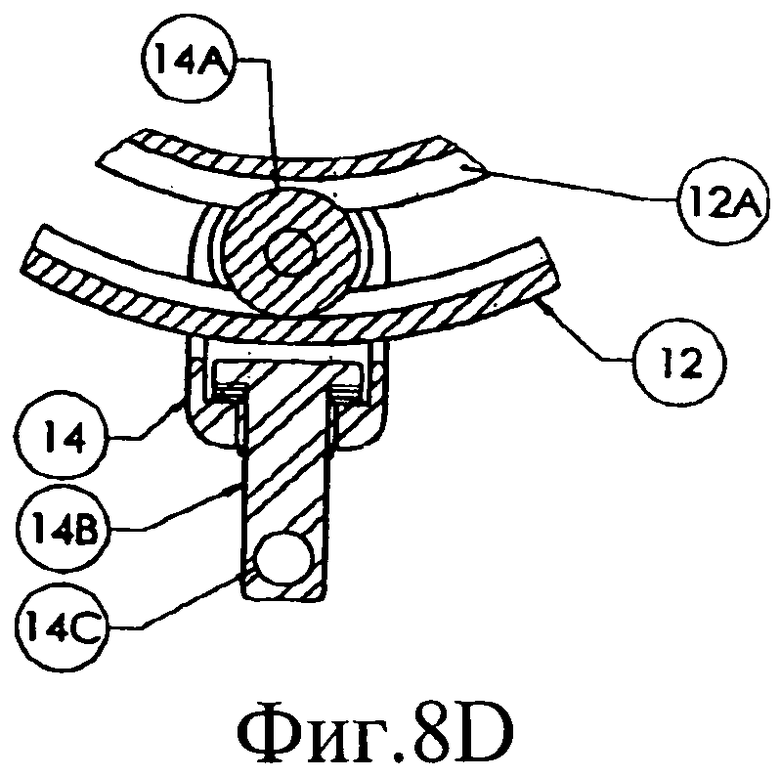
Фиг.8D представляет собой подробный вид в сечении соединения между скобой и направляющей.
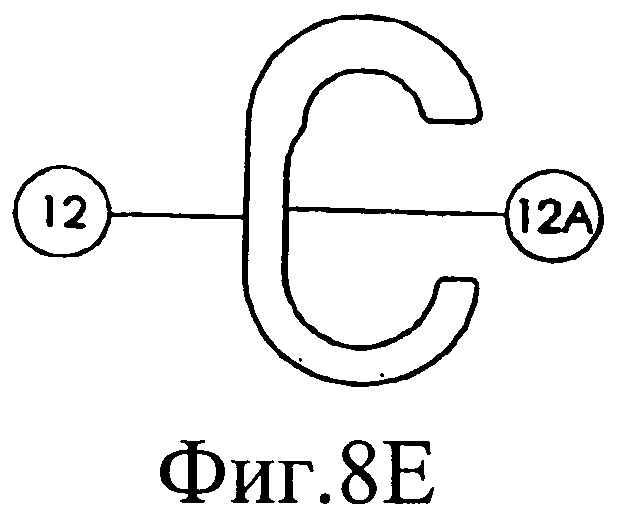
Фиг.8Е представляет собой вид в сечении направляющей.
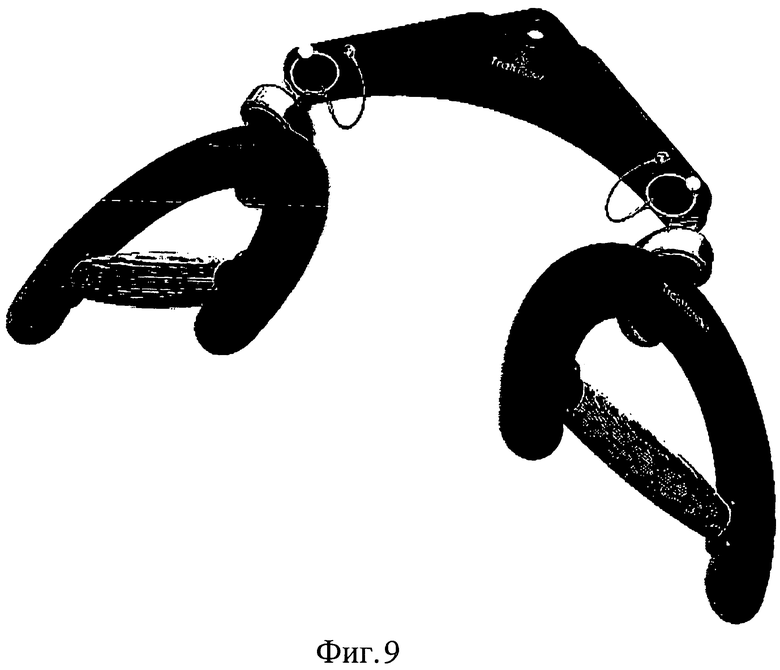
Фиг.9 представляет собой вид в аксонометрии перекладины для выполнения упражнений, выполненной в соответствии с настоящим изобретением, имеющей две тяговые рукоятки.
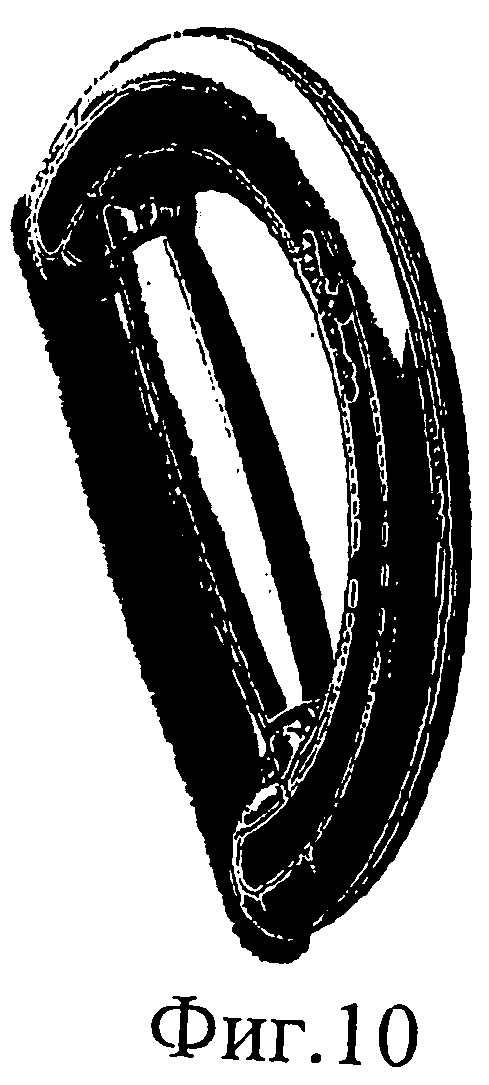
Фиг.10 представляет собой вид в аксонометрии настоящего изобретения с полой направляющей и пазом по внешнему периметру.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Предпочтительный вариант выполнения эргономичной тяговой рукоятки 1, выполненной в соответствии с настоящим изобретением, показан на Фиг.8, 8А, 8В, 8С, 8D, 8Е и Фиг.4. Как показано, тяговая рукоятка 1 может содержать ручку или захват 10, который может захватывать пользователь, и направляющую или изогнутый элемент 12, прикрепленный к ручке 10, а именно к концам ручки 10. Захват 10 предпочтительно круглый и текстурированный так, чтобы пользователю было удобно его захватить и ограничить проскальзывание, или он может иметь продолговатую или другую форму и может иметь гладкую отделку или другую структуру. Направляющая 12 предпочтительно изогнута и может иметь форму полукруга, как это показано. Однако для изогнутого элемента 12 могут использоваться овальные и другие формы. Направляющая или изогнутый элемент 12 предпочтительно имеет канавку 12А, в которую вмещается скоба 14. Ввиду всего сказанного выше, скоба 14 может перемещаться вдоль канавки 12А элемента 12 в момент выполнения пользователем упражнения. Направляющие 12, 12В и 12С могут предпочтительно быть выполнены из алюминия для комбинации прочности и легкости, но могут быть выполнены из композитных или других материалов.
Как показано на Фиг.8А и 8С, ручка или захват 10 может содержать отверстие или полую часть 10В, через которую проходит стержень 10А. Ручной захват 10 может предпочтительно быть выполнен из алюминия для комбинации прочности и легкости, но может быть выполнен из композитных или других материалов или их комбинации. Ручка или захват 10 может предпочтительно поворачиваться вокруг оси Х стержня 10А. Концы стержня 10А предпочтительно проходят за концы ручки 10, чтобы взаимодействовать с изогнутым элементом 12, описанным позднее в связи с Фиг.8С. Стержень 10А может предпочтительно быть изготовлен из нержавеющей стали для прочности и устойчивости к коррозии (такой как устойчивости к потовым выделениям), но также из композитных или других материалов. Между ручкой 10 и стержнем 10А могут быть размещены подшипники 10С, чтобы обеспечить ручке 10 возможность поворота вокруг оси Х и предотвращать трение между ручкой 10 и стержнем 10А. К концам захвата 10 могут быть прикреплены шайбы 10D так, чтобы подшипники и другие внутренние элементы были герметично закрыты и чтобы предотвратить истирание концов ручки 10 в контакте с направляющей 12 и создания трения. Шайбы могут быть выполнены из нейлона, пластмассы или любого другого материала, но предпочтительно с низкими характеристиками трения.
Кроме того, как показано на Фиг.3А и 8С, направляющая или изогнутый элемент 12 может содержать выполненные с возможностью съема части 12В, которые могут быть сконцентрированы около диаметральной оси направляющей 12, то есть сконцентрированы на оси или около оси, которая проходит через диаметр направляющей 12, и которые могут быть прикреплены к изогнутому элементу 12 посредством заклепок или болтов 12С. Помимо заклепок или болтов могут использоваться другие типы крепежа 12С.
Съемные части 12В могут содержать отверстие 12D, выполненное так, что, когда съемные части прикреплены к изогнутому элементу 12, на концах стержня 10А образуется отверстие. Отверстие 12D и стержень 10А могут иметь такие размеры, что они надежно соединены. В качестве альтернативы, они могут иметь такие размеры, что концы 10А могут поворачиваться внутри отверстий 12D. Так или иначе, ручка 10 может поворачиваться вокруг оси X. Таким образом, ручка 10 может поворачиваться вокруг стержня 10А, или же ручка 10 и стержень 10А могут быть надежно прикреплены, а концы стержня 10А могут поворачиваться в отверстии 12D. Этим или другим подходящим образом захват 10 с возможностью поворота соединен с изогнутым элементом 12. Таким образом, предусмотренный поворот обеспечивает возможность перемещения эргономичной тяговой рукоятки 1, защищая, тем самым, пользователя. Таким образом, например, тяговая рукоятка обеспечивает направление или тип движения между пользователем и грузом или сопротивлением, к которому прикреплена тяговая рукоятка.
Направляющая 12 может иметь С-образное поперечное сечение, как показано на Фиг.8Е. Это С-образное поперечное сечение может образовывать канавку 12А, упомянутое выше. Скобу 14 может быть с возможностью перемещения установлен на направляющей 12, как показано на Фиг.8, Фиг.8А и Фиг.8D. Предпочтительно, скоба 14 может перемещаться вдоль канавки 12А и/или внутри нее.
Скоба 14 может содержать фланец 14D, который может быть размещен на стороне направляющей 12. Как показано на Фиг.8В, предпочтительно, чтобы фланец 14D имел в целом L-образную форму, так чтобы он проходил поверх направляющей 12, чтобы лапка 14В находилась в центре направляющей 12 и оси X. Однако могут быть использованы и другие формы. Как описано ниже, это обеспечивает точке крепления 14С и, таким образом, тяговой рукоятке 1 возможность располагаться на одной линии с тросом или другим устройством, к которому прикреплена тяговая рукоятка 1. Благодаря этому обеспечивается безопасность и плавная работа для пользователя.
Фланец 14D может быть соединен с колесом 14А, которое имеет подходящий размер для скольжения вдоль и/или внутри канавки 12А, обеспечивая, тем самым, скобе 14 и, таким образом, точке крепления, например крепления к тросу, возможность поворачиваться вокруг или иным образом перемещаться по окружности или траектории канавки 12А направляющей 12. Колесо может быть выполнено из большого разнообразия материалов, но предпочтительно из материала, который не будет деформироваться или защемляться под тяжелыми нагрузками. Колесо может быть с возможностью поворота установлено на оси 14J с подшипниками для ровной работы. Конец 14J оси может иметь резьбу, причем конец может быть вкручен во фланец 14D или надежно прикреплен другими средствами. Ось 14J может иметь больший диаметр или она может иметь другие стопорные средства, чтобы сохранять определенное расстояние между колесом 14А и фланцем 14D. В качестве альтернативы, ось 14J может быть отлита или обработана на станке в виде одной целой части фланца 14D. Колесо 14А может также быть надежно прикреплено к оси 14J, которая может быть с возможностью поворота присоединена к фланцу 14D и, таким образом, к скобе 14. Так или иначе, колесо 14А может быть прикреплено к фланцу 14D для обеспечения возможности поворота колеса 14А относительно фланца 14D и скобы 14.
Канавка 12А и колесо 14А могут иметь множество различных форм, например выпуклую и вогнутую или V-образную канавку и V-образный выступ. Предпочтительно, чтобы колесо 14А и канавка 12А взаимодействовали плавно так, чтобы тяговая рукоятка 1 обеспечивала безопасность и плавную работу во всем диапазоне движений пользователя. Например, предпочтительно, чтобы колесо 14А и канавка 12А не защемлялись, во избежание внезапной остановки или старта во всем диапазоне движений пользователя. Канавка 12А может проходить к каждому концу направляющей 12 так, чтобы колесо 14А могло перемещаться к концам направляющей и обеспечивать возможность поворота скобы 14 вокруг концов направляющей 12 без защемления и, таким образом, обеспечивать дополнительные степени подвижности между ручкой 1 и скобой 14 и, следовательно, между ручкой 1 и сопротивлением, присоединенным к скобе 14.
Хотя вариант выполнения, описанный выше, рассматривает использование колеса, такого как колесо 14А, в объеме изобретения также рассматриваются другие элементы, которые могут перемещаться по канавке 12А. Например, может использоваться блок материала с искривленной и гладкой наружной поверхностью, такой как, тефлон(тм), который может в целом соответствовать изгибу канавки 12А. В качестве альтернативы, может использоваться элемент, который содержит подшипники, предпочтительно, чтобы обеспечивать возможность перемещения скобы 14 по канавке 12А.
Шайба 14G может быть использована на оси 14J, чтобы совместить скобу 14 с направляющей 12, таким образом, совмещая колесо 14А с канавкой 12А, чтобы предотвратить защемление колеса 14А в канавке 12А и предотвратить истирание скобы 14 о направляющую 12. Скоба 14 может также содержать лапку 14В, имеющую отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки 1, например, с тросом. Предпочтительно, лапка 14В может быть изготовлена из нержавеющей стали для прочности и устойчивости к коррозии, но может быть изготовлена из композитных или других материалов с подходящим пределом прочности на растяжение, чтобы выдерживать большой вес. При использовании скоба 14 будет скользить вдоль направляющей 12, обеспечивая, тем самым, еще одну степень подвижности эргономичной тяговой рукоятки 1, еще больше предохраняя, тем самым, пользователя, когда пользователь растягивается во всем диапазоне движений. Как упомянуто выше, эта точка соединения 14С предпочтительно расположена выше направляющей 12.
Скоба 14 может также быть выполнена так, что лапка 14В может поворачиваться относительно остальной части скобы 14. Например, лапка 14В может быть соединена с остальной частью скобы 14 упорным подшипником 14Е и 14F скольжения и/или втулочным подшипником 14Н, или другим механизмом, который обеспечивает возможность поворота лапки 14В вокруг оси Y, проходящей вверх. Это обеспечивает еще одну степень подвижности, которая добавляется к безопасности и комфорту, испытываемым пользователем.
Как показано на Фиг.8А, предохранительное кольцо 14I или подобный механизм может быть соединен с лапкой 14В, чтобы не допустить ее выскальзывания из скобы 14, когда та не используется. Лапка 14В может быть с возможностью поворота соединена со скобой 14 путем вставления ее через втулочный подшипник 14Н, который может быть вдавлен в лапку 14. Втулочный подшипник может быть выполнен из промасленной бронзы или другого материала, который минимизирует трение между лапкой 14В и скобой 14.
На Фиг.8D показана часть узла 14 скобы и ее связь с направляющей 12 и канавкой 12С.
Лапка 14В может также быть видоизменена или снабжена дополнениями, которые обеспечивают возможность соединения ручки с большим количеством оборудования для выполнения упражнений и спортивного инвентаря, например, ремни сопротивления или трубки, рычажное тренажерное оборудование, доски для кайта, и т.д. В качестве альтернативы, ручка может быть соединена с большим разнообразием другого оборудования, такого как конец троса, который необходимо потянуть, чтобы завести газонокосилку.
Альтернативный вариант выполнения эргономичной тяговой рукоятки 1, выполненной в соответствии с настоящим изобретением, показан на Фиг.1. Как показано, тяговая рукоятка 1 может содержать ручку или захват 10, который захватывает пользователь, и направляющая 12, прикрепленная к концам ручки 10. Захват 10 предпочтительно имеет круглую форму и гладкую поверхность, чтобы пользователю было удобно его захватывать. Направляющая 12 может быть выполнена в форме полукруга, как показано, либо могут использоваться овальные и другие формы. Направляющая 12 имеет два конца, которые соединены с концами захвата 10 или вблизи этих концов.
Длина захвата 10 определяет ось X. Соединение между захватом 10 и направляющей 12 таково, что захват 10 может поворачиваться вокруг оси X, как показано. Это может быть достигнуто несколькими способами. Например, как показано на Фиг.2А, захват 10 может иметь отверстие 10В снизу по оси X, через которое проходит стержень 10А. Между захватом 10 и стержнем 10А могут быть расположены подшипники 10С, которые обеспечивают возможность поворота захвата 10 относительно стержня 10А. Концы стержня 10А могут быть надежно соединены с концами направляющей 12 таким образом, чтобы захват 10 мог поворачиваться вокруг оси X. Это обеспечивает одну степень подвижности эргономичной тяговой рукоятки 1, предохраняя, тем самым, пользователя.
Направляющая 12 может иметь I-образное поперечное сечение, как показано на Фиг.2А. С этой целью направляющая может включать расположенные друг напротив друга канавки 12А, которые формируют I-образное поперечное сечение. Скоба 14 может быть с возможностью перемещения установлена на направляющей, как показано на Фиг.1, Фиг.2 и Фиг.2А. Скоба 14 может содержать две вилки или фланца 14D, которые расположены по обе стороны направляющей 12. Каждый фланец может быть соединен с колесом 14А, который имеет такой размер, чтобы скользить внутри канавок 12А, обеспечивая, тем самым, поворот скобы 14 и, соответственно, точки крепления, например крепления к тросу, вокруг или перемещение по окружности или по пути канавок 12А направляющей 12. Скоба 14 может также содержать лапку 14В, которая имеет отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки 1, например, с кабелем. При использовании скоба 14 может скользить вдоль направляющей 12, обеспечивая, тем самым, еще одну степень подвижности эргономичной тяговой рукоятки 1, тем самым еще больше защищая пользователя, когда пользователь растягивается во всем диапазоне движений.
Скоба 14 может также быть выполнена так, чтобы лапка 14В могла поворачиваться относительно остальной части скобы 14. Например, лапка 14В может быть соединена с остальной частью скобы 14 подшипниками, подобными тем, что используются между захватом 10 и направляющей 12, либо другим механизмом, который обеспечивает возможность поворота лапки 14В вокруг оси Y, проходящей вверх. Это обеспечивает еще одну степень подвижности, которая добавляется к безопасности и комфорту, испытываемому пользователем.
Лапка 14В может быть модифицирована или снабжена дополнениями, которые обеспечивают возможность соединения рукоятки с разнообразным оборудованием для выполнения упражнений и спортивного инвентаря, например ремни сопротивления или трубки, рычажное тренажерное оборудование, доски для кайта и т.д. В качестве альтернативы, ручка может быть соединена с большим разнообразием других видов оборудования, таких как конец троса, который необходимо потянуть, чтобы завести газонокосилку.
Подвижная точка крепления, обеспечиваемая этой сборкой, обеспечивает пользователю возможность выполнять упражнения, которые не могут быть выполнены с существующими ручками, или по меньшей мере обеспечивает возможность выполнения таких упражнений более безопасно и удобно. На Фиг.3А-3D показаны два упражнения, которые пользователь может выполнять с помощью этого изобретения и которые невозможно выполнить с существующими ручками.
На Фиг.3А и 3В изображен пользователь, выполняющий упражнение на трицепс, причем ручка присоединена к тросу сопротивления, который начинается в точке, расположенной выше плеч пользователя. На Фиг.3А изображен пользователь, держащий рукоятку 1, как если бы он держал в руках молоток, поднятый вверх. На Фиг.3В изображено, как точка крепления 14В, 14С перемещается вдоль направляющей 12 рукоятки 1, когда пользователь вытягивает свою руку в движении вниз, поддерживая относительное положение руки пользователя, запястья и предплечья. Чтобы добиться комфорта и безопасности, захват 10 может также поворачиваться вокруг оси Y, если пользователь стремится загнуть свое запястье во время движения вниз, обеспечивая, тем самым, еще одну степень подвижности. И если пользователь стремится поворачивать свое запястье во время движения вниз, поворот между скобой 14 и лапкой 14А обеспечивает еще одну степень подвижности. Такие движения не могут быть выполнены с существующими ручками, не вызывая чрезмерного и неестественного напряжения на мышцы пользователя, сухожилия и/или связки руки, запястья и/или предплечья.
На Фиг.3С и 3D изображен пользователь, выполняющий упражнение на бицепс, причем рукоятка 1 присоединена к тросу сопротивления, который начинается в точке, расположенной ниже локтя пользователя.
На Фиг.3А изображен пользователь, держащий рукоятку 1, как если бы он держал в руках молоток, опущенный вниз. На Фиг.3В изображено, как точка крепления 14В, 14С перемещается вдоль направляющей 12 рукоятки 1, когда пользователь вытягивает свою руку в движении вверх, поддерживая относительное положение руки пользователя, запястья и предплечья. Чтобы добиться комфорта и безопасности, захват 10 может также поворачиваться вокруг оси Y, если пользователь стремится загнуть свое запястье во время движения вверх. И если пользователь стремится поворачивать свое запястье во время движения вверх, поворот между скобой 14 и лапкой 14А обеспечивает еще одну степень подвижности. Такие движения не могут быть выполнены с существующими ручками, не вызывая чрезмерного и неестественного напряжения на мышцы пользователя, сухожилия и/или связки руки, запястья и/или предплечья.
Вариант выполнения, описанный выше, подходит для использования тренажера с тросом (и/или трубками или ремнями сопротивления). Однако тяговая рукоятка 1, выполненная в соответствии с изобретением, может быть внедрена в концы перекладины, например перекладины для тяги вниз на высоком блоке, как показано на Фиг.7А, перекладины для гребли и в других упражнениях, как показано на Фиг.9, перекладины с V-образной ручкой для тяги вниз, как показано на Фиг.7В, перекладины для подтягивания, как показано на Фиг.7С, и/или рычажной перекладины для занятий фитнесом. В каждом из этих вариантов выполнения степени подвижности могут быть обеспечены поворотом захвата 10 вокруг оси А, движением скобы 14 по направляющей 12 и поворотом лапки 14А относительно скобы 14.
Альтернативный вариант выполнения этого изобретения может содержать ремень для лодыжки или ноги вместо захвата 10, как показано на Фиг.7D, который, соединяя тяговую рукоятку 1 и ногу или лодыжку пользователя, защищает пользователя во время упражнений на ноги.
В альтернативном варианте выполнения этого изобретения направляющая 12 может быть выполнена круглой или в форме эллипса, как показано на Фиг.7F, обеспечивая, тем самым, возможность перемещения скобы 14 на 360 градусов вокруг захвата 10 и/или указанного дополнительного ремня для лодыжки/ноги.
В альтернативном варианте выполнения направляющая 12 может быть значительно увеличена, как показано на Фиг.7Е, обеспечивая возможность, тем самым, замены захвата 10 множеством различных элементов, например перекладиной для подтягивания, перекладиной для тяги вниз, трапецией и т.д.
В альтернативном варианте выполнения этого изобретения направляющая 12 может иметь поперечное сечение различной формы, например в форме полой круглой или квадратной трубы, или сплошного круга, квадрата и другой формы. Скоба 14 может быть видоизменена, чтобы перемещаться вдоль окружности направляющей 12.
Рукоятка 1 может быть выполнена во множестве альтернативных вариантов выполнения, чтобы обеспечить возможность перемещения точки крепления, описанной выше, по направляющей 12.
На Фиг.5А изображен альтернативный вариант выполнения этого изобретения, где направляющая 12 может иметь круглое, овальное или другое полое трубчатое поперечное сечение. Направляющая 12 может иметь паз 12В, который находится на внешней стороне направляющей 12. Скоба 14 может быть модифицирована, чтобы содержать одну единственную вилку или фланец 14D, вставленный в канавку 12В. Колесо 14А, имеющее размер, подходящий для скольжения внутри направляющей 12, может быть соединено с одним или обеими сторонами фланца 14D, обеспечивая, тем самым, возможность поворота скобы 14 и, соответственно, точки крепления вокруг окружности направляющей 12. Скоба 14 может также иметь лапку 14В, которая имеет отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки, например, с тросом. Лапка 14В может также быть выполнена с возможностью поворота относительно остальной части скобы 14. Этот вариант выполнения выгоден тем, что движущиеся колеса 14А могут быть заключены внутри направляющей 12, предотвращая, таким образом, контакт c пользователем.
На Фиг.5В изображен альтернативный вариант выполнения этого изобретения, где направляющая 12 может иметь квадратное, прямоугольное или другое полое трубчатое поперечное сечение. Направляющая 12 может иметь паз 12В, который проходит по наружному периметру направляющей 12. Скоба 14 может быть модифицирована, чтобы содержать одну единственную вилку или фланец 14D, вставленный в канавку 12В. Колесо 14А, имеющее размер, подходящий для скольжения по внутренней стороне направляющей 12, может быть соединено с одной или обеими сторонами фланца 14D, обеспечивая, тем самым, возможность поворота скобы 14 и, соответственно, точке крепления по окружности направляющей 12. Скоба 14 может также содержать лапку 14В, которая имеет отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки, например, с тросом. Лапка 14В может также быть выполнена с возможностью поворота относительно остальной части скоби 14. Этот вариант выполнения обеспечивает преимущество, заключающееся в том, что движущиеся колеса 14А могут быть заключены внутри направляющей 12, предотвращая, таким образом, контакт с пользователем.
На Фиг.6А изображен альтернативный вариант выполнения этого изобретения, где направляющая 12 может иметь круглое, овальное или другое профилированное сплошное поперечное сечение. Скоба 14 может иметь две вилки или фланца 14D, которые расположены по обе стороны от направляющей 12. Каждый фланец может быть соединен с колесом 14А, имеющим размер, подходящий для скольжения по внутреннему периметру направляющей 12, обеспечивая, тем самым, возможность поворота скобы 14 и, соответственно, точке крепления по окружности направляющей 12. Скоба 14 может также содержать лапку 14В, которая имеет отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки, например, с тросом. Лапка 14В может также быть выполнена с возможностью поворота относительно остальной части скобы 14. Этот вариант выполнения обеспечивает преимущество, заключающееся в том, что движущиеся колеса 14А могут быть заключены внутри направляющей 12, предотвращая, таким образом, контакт с пользователем.
На Фиг.6В изображен альтернативный вариант выполнения этого изобретения, где направляющая 12 может иметь квадратное, прямоугольное или другое профилированное сплошное поперечное сечение. Скоба 14 может иметь две вилки или фланца 14D, которые расположены по обе стороны от направляющей 12. Каждый фланец может быть соединен с колесом 14А, имеющим размер, подходящий для скольжения по внутреннему периметру направляющей 12, обеспечивая, тем самым, возможность поворота скобы 14 и, соответственно, точке крепления по окружности направляющей 12. Скоба 14 может также содержать лапку 14В, которая имеет отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки, например, с тросом. Лапка 14В может также быть выполнена с возможностью поворота относительно остальной части скобы 14. Этот вариант выполнения обеспечивает преимущество, заключающееся в том, что движущиеся колеса 14А могут быть заключены внутри направляющей 12, предотвращая, таким образом, контакт с пользователем.
На Фиг.6С изображен альтернативный вариант выполнения этого изобретения, где направляющая 12 может иметь вогнутую или другую профилированную выемку на внутренней стороне направляющей. Скоба 14 может иметь две вилки или фланца 14D, которые расположены по обе стороны от направляющей 12. Каждый фланец может быть соединен с колесом 14А, имеющим размер, подходящий для скольжения внутри и по вогнутому внутреннему периметру направляющей 12, обеспечивая, тем самым, возможность поворота скобы 14 и, соответственно, точке крепления по окружности направляющей 12. Скоба 14 может также содержать лапку 14В, которая имеет отверстие 14С, обеспечивающее возможность соединения скобы 14 и, таким образом, эргономичной тяговой рукоятки, например, с тросом. Лапка 14В может также быть выполнена с возможностью поворота относительно остальной части скобы 14. Этот вариант выполнения обеспечивает преимущество, заключающееся в том, что движущиеся колеса 14А могут быть заключены внутри направляющей 12, предотвращая, таким образом, контакт с пользователем.
На Фиг.10 изображен вариант выполнения этого изобретения, подобный описанным на Фиг.5А и/или 5В, с пазом, проходящим по внешнему периметру направляющей, что обеспечивает возможность перемещения скобы или лапки и, тем самым, точки крепления по окружности направляющей.
Рукоятка 1, выполненная в соответствии с настоящим изобретением, и ее составляющие предпочтительно изготовлены из соответствующих прочных материалов таких, которые, как правило, используются в строительстве тренажерного оборудования, например стали, алюминия и/или других металлов, пластмассы, поливинилхлорида, стекловолокна и/или других композитных материалов, или любых других подходящих материалов, которые могут улучшить функциональность, прочность и/или комфорт изобретения.
Настоящее изобретение имеет много других применений, помимо тренажерного оборудования. Например, тяговая рукоятка 1 может быть прикреплена к концу троса, за который тянут, чтобы завести газонокосилку или другой двигатель. Это изобретение обладает существенным преимуществом в данном применении, поскольку пользователь, как правило, дает тросу хороший рывок, таким образом, увеличивающий напряжение. В другом применении тяговая рукоятка может быть прикреплена к тросу или веревке, используемым на спортивных состязаниях, например буксирная веревка для водного лыжника, веревка для кайта, или обвязка на парусе, как те, что используются в кайт-бординге.
Со ссылкой снова на использование тяговой рукоятки 1, большое количество упражнений, для которых может использоваться тяговая рукоятка 1, описаны ниже. В следующих упражнениях на тяговую рукоятку 1 ссылаются как на Тяговую Рукоятку (TRAK HANDLE™).
Молотковые сгибания на бицепс
1. Начните с правой руки. Установите кабельный шкив приблизительно на уровне колена. Встаньте перед шкивом так, чтобы ваше правое плечо находилось в центре шкива, а ваши ноги - перпендикулярно линии натяжения, приблизительно на расстоянии 12 дюймов (30 сантиметров) между пальцами ног и передней частью шкива.
2. Захватите Тяговую Рукоятку в правую руку так, чтобы захват находился в вертикальном положении, как если бы вы держали молоток. Расположите плечо таким образом, чтобы оно было направлено вниз вдоль боковой стороны вашего тела, а ваше плечо направлено на шкив. Держите спину прямо и грудь вперед. Это ваше исходное положение.
3. Согните руку, поднося Тяговую Рукоятку к плечу. Не поворачивайте запястье во время движения. Ваше плечо должно быть опущено во время всего движения.
4. Вернитесь к вашему исходному положению. Это одно повторение.
5. Повторите то же самое для левой руки, стоя слева от шкива.
Поворот на высоком блоке в положении сидя на коленях
1. Используйте перекрестную систему тросов и установите оба шкива в самом высоком положении. Встаньте между шкивами. Возьмите Тяговую Рукоятку (ТР) в обе руки так, чтобы направляющая была обращена к вашим ладоням. Примите положение сидя на коленях, чтобы колени оказались немного позади тяговой линии. Выпрямите руки так, чтобы они находились на одной линии с тросом и с вашими ладонями, направленными вниз. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
2. Держите плечи неподвижно, а локти направленными к шкивам. Согните руки, поворачивая ладони, запястье и предплечья, подводя рукоятки к плечам.
3. Вернитесь к вашему исходному положению. Убедитесь, что ваши плечи остаются в одном положении во время движения. Это одно повторение.
Вариант №1: не поворачивайте руки при возврате к исходному положению. Работайте вашим бицепсом, используя отрицательное сопротивление. Ваши ладони будут направлены вверх в конце повторения. Затем поворачивайте ладони вниз прежде, чем начинать следующее повторение.
Тяга с поворотом
1. Используйте перекрестную систему тросов и установите оба шкива в самом низком положении. Встаньте между шкивами так, чтобы ваши ноги были немного позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки так, чтобы направляющая была обращена к вашим ладоням. Выпрямите руки так, чтобы они были на одной линии с тросом и с вашими ладонями, обращенными назад. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
2. Согните руки, поворачивая ладони и запястья к потолку. Поднимите руки к ключицам. Ваши ладони должны быть направлены к груди в конце движения. Ваши плечи должны оставаться неподвижными, направленными вниз на шкивы во время всего движения.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Вариант №1: не поворачивайте руки, возвращаясь к исходному положению, и работайте бицепсом, используя отрицательное сопротивление. Ваши ладони будут направлены вперед в конце повторения. Поверните ладони назад и начните следующее повторение.
Тяга блока с поворотом
1. Используйте перекрестную систему тросов и установите оба шкива в самом низком положении. Встаньте между шкивами так, чтобы ваши ноги были немного позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки так, чтобы направляющая была обращена к вашим ладоням. Вытяните руки прямо в направлении шкивов, чтобы они находились на одной линии с тросами и ваши ладони были направлены назад. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
2. Согните руки и поднимите локти назад и вверх, поворачивая кисти, запястья и локти к потолку. Поднесите руки сбоку груди. Ваши ладони должны быть направлены вверх в конце повторения.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Вариант №1: На самом верху движения поворачивайте ваши локти вниз и затем вверх, одновременно перемещая руки и Тяговую Рукоятку (ТР) к плечам спереди. Сожмите свой бицепс. Выполните движение в противоположном направлении, а затем завершите вторую часть повторения.
Вариант №2: Не поворачивайте руки, возвращаясь к исходному положению, и работайте бицепсом, используя отрицательное сопротивление. Ваши ладони будут направлены вперед в конце повторения. Поверните ладони назад и начните следующее повторение.
Поворот на высоком блоке в положении стоя
1. Используйте перекрестную систему тросов и установите оба шкива в самом высоком положении. Встаньте между шкивами так, чтобы ваши ноги были немного позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки так, чтобы направляющая была обращена к вашим ладоням. Держите руки прямо по бокам и ладони рук опустите вниз. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
2. Держите предплечья неподвижными и параллельно полу, согните руки, поворачивая кисти, запястья и предплечья. Потяните рукоятки как можно ближе к вашим ключицам.
3. Вернитесь к вашему исходному положению. Убедитесь, что ваши предплечья остаются в горизонтальном положении во время всего движения. Это - одно повторение.
Вариант №1: Не поворачивайте руки, возвращаясь к исходному положению. Работайте бицепсом, используя отрицательное сопротивление. Ваши ладони будут направлены вверх в конце повторения. Дальше, поверните ладони вниз прежде, чем вы начнете следующее повторение.
Попеременные наклоны вниз
1. Используйте перекрестную систему тросов и установите оба шкива в самом высоком положении. Встаньте между шкивами так, чтобы ваши пятки находились перед тяговой линией. Захватите Тяговую Рукоятку (ТР) в обе руки, чтобы крюк скользил по тыльной стороне вашей руки. Вытяните руки прямо, по направлению к шкивам, чтобы они были на одной линии с тросами. Расположите тыльную сторону рук таким образом, чтобы они были направлены вверх и наклонены вперед, держа вашу спину прямо и грудь вперед, а колени и бедра немного согните. Найдите баланс с грузом, который вы используете. Сведите лопатки и выпрямите грудную клетку. Это - ваше исходное положение.
2. Немного согните руки и сократите грудные мышцы, опуская руки и плечи вниз и вперед. Поворачивайте кисти и руки таким образом, чтобы ваши ладони встретились и руки соединились на уровне живота. Сведите предплечья так близко друг к другу, как вам удобно и согните вашу грудную клетку.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время движения ваше туловище должно быть неподвижным. Избегайте качания назад и вперед.
Попеременные движения
1. Используйте перекрестную систему тросов и установите оба шкива в положение слегка ниже грудной клетки. Встаньте между шкивами так, чтобы ваши пятки находились перед тяговой линией. Захватите Тяговую Рукоятку (ТР) в обе руки, чтобы направляющая была направлена к тыльной стороне вашей руки. Вытяните руки по направлению к шкивам, чтобы они были на одной линии с тросами. Расположите тыльную сторону рук таким образом, чтобы они были направлены вниз и немного наклонены вперед, держа вашу спину прямо, грудь вперед, а колени и бедра немного согните. Найдите баланс с грузом, который вы используете. Сведите лопатки и выпрямите грудную клетку. Это - ваше исходное положение.
2. Немного согните руки и сократите грудные мышцы, поднимая руки и плечи вперед. Поворачивайте кисти и руки таким образом, чтобы ваши ладони встретились и руки соединились на уровне лица. Сведите предплечья так близко друг к другу, как вам удобно и сведите вашу грудную клетку.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время движения ваше туловище должно быть неподвижным. Избегайте качания назад и вперед.
Попеременные наклоны вверх
1. Используйте перекрестную систему тросов и установите оба шкива в самом низком положении. Встаньте между шкивами так, чтобы ваши пятки находились перед тяговой линией. Захватите Тяговую Рукоятку (ТР) в обе руки, чтобы крюк скользил по тыльной стороне вашей руки. Вытяните руки по направлению к шкивам, чтобы они были на одной линии с тросами. Расположите тыльную сторону рук таким образом, чтобы они были направлены вниз и немного наклонены вперед, держа вашу спину прямо, грудь вперед, а колени и бедра немного согните. Найдите баланс с грузом, который вы используете. Сведите лопатки и выпрямите грудную клетку. Это - ваше исходное положение.
2. Немного согните руки и сократите грудные мышцы, поднимая руки и плечи вперед и вверх. Поворачивайте кисти и руки таким образом, чтобы ваши ладони встретились и руки соединились на уровне груди. Сведите предплечья так близко друг к другу, как вам удобно.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время движения ваше туловище должно быть неподвижным. Избегайте качания назад и вперед.
Попеременное скрещивание пресса к груди
1. Используйте перекрестную систему тросов и установите оба шкива в самом высоком положении. Встаньте между шкивами так, чтобы ваши носки находились на тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Держите руки прямо по направлению к шкивам. Поворачивайте руки и предплечья, чтобы ваши ладони были направлены вперед. Держите спину прямо, плечи назад, грудь вперед и расправьте грудную клетку. Это - ваше исходное положение.
2. Держите ваши руки прямо, опустите вниз плечи и руки, поворачивая кисти и руки, пока ваши ладони направлены назад и ваши руки опущены вниз вдоль передней части ваших бедер. Поверните плечи вперед и согните вашу грудную клетку в конце этого движения.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Обратный поворот вниз
1. Начните с поворота вправо. Установите шкив в самом высоком положении. Встаньте так, чтобы ваше левое плечо было направлено к шкиву и ноги параллельно тяговой линии. Ноги на ширине плеч и носки приблизительно на 6-12 дюймов (15-30 сантиметров) позади тяговой линии. Ваша левая нога должна быть на расстоянии приблизительно 18 дюймов (45 сантиметров) от шкива.
2. Держите спину прямо, грудь вперед, расправьте плечи, и голову выровняйте по центру. Захватите Тяговую Рукоятку (ТР) в правую руку, чтобы крюк скользил по тыльной стороне вашей руки. Поворачивайте плечи налево, пока они не приблизятся к шкиву (держите позвоночник прямо, насколько это возможно). Направьте правую руку на шкив ладонью вниз. Втяните свой живот и задействуйте все основные мышцы туловища. Это - ваше исходное положение.
3. Поворачивайтесь по диагонали вниз от шкива, перемещая ваш вес к вашей правой ноге и сгибая правое колено и бедро. Во время этого движения вытяните правую руку от груди направо вниз, поворачивая ваше запястье и предплечье так, чтобы тыльная сторона вашей руки удалялась от шкива. Остановите движение бедер, когда они будут параллельны вашим носкам, и затем продолжайте повороты плеч направо и рук вниз от шкива.
4. Повернитесь назад к вашему исходному положению. Это - одно повторение.
5. Измените направление поворота с правого плеча на левое плечо.
Обратный поворот вверх
1. Начните с поворота вправо. Установите шкив в самом низком положении. Встаньте так, чтобы ваше левое плечо было направлено к шкиву и ноги параллельно тяговой линии. Ноги на ширине плеч и носки приблизительно на 6-12 дюймов (15-30 сантиметров) позади тяговой линии. Ваша левая нога должна быть на расстоянии приблизительно 18 дюймов (45 сантиметров) от шкива.
2. Держите спину прямо, грудь вперед, расправьте плечи, и голову выровняйте по центру. Согните колени и бедра. Захватите Тяговую Рукоятку (ТР) в правую руку, чтобы крюк скользил по тыльной стороне вашей руки. Переместите свой вес на вашу левую ногу, согнитесь в бедрах, и поворачивайте ваши плечи налево, пока они не приблизятся к шкиву (Держите позвоночник прямо, насколько это возможно). Направьте правую руку на шкив ладонью вниз. Втяните свой живот и задействуйте все основные мышцы туловища. Это - ваше исходное положение.
3. Согните ягодичные мышцы и выпрямите ногу, нажимая через вашу левую пятку. Поворачивайтесь по диагонали вверх от шкива до тех пор, пока ваши носки будут параллельны корпусу. Во время этого движения вытяните правую руку от груди направо вверх, поворачивая ваше запястье и предплечье так, чтобы тыльная сторона вашей руки удалялась от Шкива. Вы должны завершить упражнение, смотря вперед, чтобы ваша правая рука двигалась по диагонали вверх и наружу к вашей правой стороне.
4. Повернитесь назад к вашему исходному положению. Это - одно повторение.
5. Измените направление поворота с правого плеча на левое плечо.
Обратный Поворот
1. Начните с поворота вправо. Поместите шкив слегка ниже высоты грудной клетки. Встаньте так, чтобы ваше левое плечо было направлено к шкиву и ноги параллельно тяговой линии. Ноги на ширине плеч и носки приблизительно на 6-12 дюймов (15-30 сантиметров) позади тяговой линии. Ваша левая нога должна быть на расстоянии приблизительно 18 дюймов (45 сантиметров) от шкива.
2. Держите спину прямо, грудь вперед, расправьте плечи, и голову выровняйте по центру. Согните немного колени и бедра. Захватите Тяговую Рукоятку (ТР) в правую руку, чтобы крюк скользил по тыльной стороне вашей руки. Напрягите основные мышцы и поворачивайте плечи налево, пока вы не будете обращены к шкиву. Направьте правую руку на шкив ладонью вниз. Это - ваше исходное положение.
3. Держите руку прямо и расправьте плечи. Задействуйте мышцы спины и поворачивайтесь направо, начиная с бедер. Вытяните правую руку от груди, поворачивая запястье и предплечье так, чтобы тыльная сторона пальцев рук смотрела вправо. Остановите поворот бедер, когда они будут параллельны вашим носкам и продолжайте повороты, пока ваши плечи не будут направлены вправо. Держите левую руку поднятой во время всего движения так, чтобы трос проходил под вашей левой рукой.
4. Повернитесь назад к вашему исходному положению. Это - одно повторение.
5. Измените направление поворота с правого плеча на левое плечо.
Попеременная тяга вниз в положении сидя на коленях
1. Используйте перекрестную систему тросов и установите оба шкива в самом высоком положении. Встаньте между шкивами так, чтобы ваши ноги были в середине тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните руки прямо к шкивам и на одну линию с тросами. Расположите тыльную сторону рук вверх, сядьте на колени на тяговую линию, спина прямая и грудь вперед. Опустите плечи и вытяните руки к шкивам. Расправьте грудную клетку и расслабьте спину и живот. Это - ваше исходное положение.
2. Согните всю спину. Согните руки, отводя локти назад к задней части ваших бедер. Одновременно поворачивайте руки, пока ладони не будет обращены к вам. Втяните живот и грудную клетку во время тяги вниз.
3. Вернитесь к первоначальному положению, расслабляя вашу спину и живот и распрямляя вашу грудную клетку. Держите плечи опущенными вниз. Это - одно повторение.
Попеременное скрещивание пресса назад
1. Используйте перекрестную систему тросов и установите оба шкива в самом высоком положении. Встаньте между шкивами так, чтобы ваши пятки были на тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Держите ваши руки и плечи прямо по направлению к шкивам. Поверните ваши руки и предплечья ладонями вниз. Держите спину прямо, плечи назад, грудь вперед и расправьте грудную клетку. Это - ваше исходное положение.
2. Задействуйте широчайшие мышцы и мышцы вашей спины. Держите руки прямо и опускайте плечи и руки вниз, поворачивая кисти и руки до тех пор, пока ваши ладони не будут смотреть вперед и ваши руки не будут опущены вниз вдоль тела.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Попеременное сжатие широчайших мышц/трапециевидных мышц
1. Используйте перекрестную систему тросов и установите оба шкива на уровне грудной клетки. Встаньте между шкивами так, чтобы ваши носки были приблизительно на 12 дюймов (30 сантиметров) позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните ваши руки так, чтобы они указывали прямо на шкивы и были на одной линии с тросами. Расположите тыльную сторону ваших рук таким образом, чтобы они были направлены назад и слегка наклонитесь назад, держа вашу спину прямо, грудь вперед, и слегка согните ваши колени и бедра. Найдите баланс с грузом, который вы используете. Вытяните плечи к шкивам. Это - ваше исходное положение.
2. Сократите нижние трапециевидные мышцы и верхние широчайшие мышцы спины. (Мышцы между и ниже ваших лопаток). Опустите плечи назад и согните руки, отводя локти назад к сокращаемым мышцам. Одновременно поворачивайте руки до тех пор, пока ваши ладони не направлены вниз.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время этого движения ваше туловище должно оставаться неподвижным. Избегайте качания назад и вперед.
Попеременное сжатие нижних широчайших мышц спины
1. Используйте перекрестную систему тросов и установите оба шкива на уровне головы. Встаньте между шкивами так, чтобы ваши носки были на 12 или более дюймов (30 сантиметров) позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните ваши руки так, чтобы они указывали прямо на шкивы и были на одной линии с тросами. Расположите тыльную сторону ваших рук таким образом, чтобы они были направлены назад и слегка наклонитесь, держа вашу спину прямо, грудь вперед, и слегка согните ваши колени и бедра, чтобы оказаться почти в сидячем положении. Найдите баланс с грузом, который вы используете. Вытяните плечи к шкивам. Это - ваше исходное положение.
2. Сократите нижние трапециевидные мышцы чуть выше вашей поясничной области. Поворачивайте ваши плечи назад и согните руки, отводя ваши локти назад к сокращаемым мышцам. Одновременно поворачивайте руки до тех пор, пока ваши ладони не направлены вниз.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время этого движения ваше туловище должно оставаться неподвижным. Избегайте качания назад и вперед.
Попеременное сжатие средних широчайших мышц спины
1. Используйте перекрестную систему тросов и установите оба шкива приблизительно на уровне подбородка. Встаньте между шкивами так, чтобы ваши носки были на 12 дюймов (30 сантиметров) позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните ваши руки так, чтобы они указывали прямо на шкивы и были на одной линии с тросами. Расположите тыльную сторону ваших рук таким образом, чтобы они были направлены назад и слегка наклонитесь, держа вашу спину прямо, грудь вперед, и слегка согните ваши колени и бедра, садясь на корточки. Найдите баланс с грузом, который вы используете. Вытяните плечи к шкивам. Это - ваше исходное положение.
2. Сократите средние мышцы спины. Опустите ваши плечи назад и согните руки, отводя ваши локти назад к сокращаемым мышцам. Одновременно поворачивайте руки до тех пор, пока ваши ладони не направлены вниз.
3. Вернитесь к исходному положению. Это одно повторение.
Замечание: Во время этого движения ваше туловище должно оставаться неподвижным. Избегайте качания назад и вперед.
Попеременное сгибание рук с поднятием плеча
1. Начните с правого плеча. Поместите шкив на уровне колена. Встаньте так, чтобы левое плечо было обращено к шкиву и ноги параллельны тяговой линии. Ваши ноги должны быть примерно на ширине плеч и ваши носки приблизительно отстоят на 6 дюймов (15 сантиметров) от тяговой линии. Ваша левая нога должна отстоять по меньшей мере на 6-12 дюймов (15-30 сантиметров) от шкива.
2. Захватите Тяговую Рукоятку (ТР) в вашу правую руку. Согните руку на 90 градусов к плечу, указывающему прямо вниз вдоль тела. Расположите вашу руку таким образом, чтобы тыльная сторона вашей руки смотрела направо. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
3. Зафиксируйте выше предплечье, запястье и руку в этом положении 90 градусов. Держите плечи прямо и поворачивайте руку назад и вперед вправо. Тыльная часть вашей руки будет обращена наверх в верхней точке движения. Крюк будет естественно скользить вокруг Тяговой Рукоятки (ТР), чтобы обеспечить это движение.
4. Вернитесь к вашему исходному положению. Это одно повторение.
5. Измените направление поворота с правого плеча на левое плечо.
Попеременное поднятие плеч с поворотом
1. Начните с правого плеча. Поместите шкив на нижний уровень. Встаньте так, чтобы правое плечо было обращено к шкиву и ноги параллельны тяговой линии. Ваши ноги должны быть примерно на ширине плеч и ваши носки приблизительно отстоят на 6 дюймов (15 сантиметров) от тяговой линии. Ваша правая нога должна отстоять по меньшей мере на 12 дюймов (30 сантиметров) от шкива.
2. Захватите Тяговую Рукоятку (ТР) в вашу правую руку так, что тыльная сторона вашей руки обращена к направляющей. Вытяните вашу правую руку прямо к шкиву на одну линию с тросом и тыльную часть вашей руки направьте к тренажеру. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
3. Держа вашу руку прямо и плечи ровно, поднимите вашу руку вверх по диагонали от шкива, скрещивая вашу руку перед лбом. Поворачивайте вашу кисть, запястье и руку тыльной стороной вашей руки от шкива в верхней точке движения.
В начале движения вы должны согнуть немного правое колено и бедро, держа вашу спину прямо. В начале движение, выпрямите вашу ногу и бедро, нажимая через вашу правую пятку и включая в движение ягодичные мышцы.
4. Смените движение на обратное и вернитесь к вашему исходному положению. Это одно повторение.
5. Измените направление поворота с правого плеча на левое плечо.
Попеременное поднятие плеча
1. Начните с правого плеча. Поместите шкив на нижний уровень. Встаньте так, чтобы левое плечо было обращено к шкиву и ноги параллельны тяговой линии. Ваши ноги должны быть примерно на ширине плеч и ваши носки отстоять на несколько дюймов от тяговой линии. Ваша левая нога должна отстоять по меньшей мере на 6-12 дюймов (15-30 сантиметров) от шкива.
2. Захватите Тяговую Рукоятку (ТР) в вашу правую руку. Держите руку прямо вниз вдоль правой стороны вашего тела, немного поворачивайте ее лицевой стороной и тыльной стороной руки вперед. Держите спину прямо и грудь вперед. Это - ваше исходное положение.
3. Держите руку прямо и плечи ровно, поднимите руку направо, поворачивая кисть, запястье и предплечье так, чтобы тыльная сторона вашей руки была направлена вверх в верхней точке движения.
4. Вернитесь к вашему исходному положению. Это одно повторение.
5. Измените направление поворота с правого плеча на левое плечо.
Попеременное сжатие широчайших мышц/трапециевидных мышц
1. Используйте перекрестную систему тросов и установите оба шкива на уровне грудной клетки. Встаньте между шкивами так, чтобы ваши носки были приблизительно на 12 дюймов (30 сантиметров) позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните ваши руки так, чтобы они указывали прямо на шкивы и были на одной линии с тросами. Расположите тыльную сторону ваших рук таким образом, чтобы они были направлены назад и слегка наклонитесь назад, держа вашу спину прямо, грудь вперед, и слегка согните ваши колени и бедра. Найдите баланс с грузом, который вы используете. Вытяните плечи к шкивам. Это - ваше исходное положение.
2. Сократите нижние трапециевидные мышцы и верхние широчайшие мышцы спины (мышцы между и ниже ваших лопаток). Опустите плечи назад и согните руки, отводя локти назад к сокращаемым мышцам. Одновременно поворачивайте руки до тех пор, пока ваши ладони не направлены вниз.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время этого движения ваше туловище должно оставаться неподвижным. Избегайте качания назад и вперед.
Попеременное сжатие средних трапециевидных мышц
1. Используйте перекрестную систему тросов и установите оба шкива на уровне колена. Встаньте между шкивами так, чтобы ваши носки были на 12 дюймов (30 сантиметров) позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните ваши руки так, чтобы они указывали прямо на шкивы и были на одной линии с тросами. Расположите тыльную сторону ваших рук таким образом, чтобы они были направлены назад и слегка наклонитесь назад, держа вашу спину прямо, грудь вперед, и слегка согните ваши колени и бедра. Найдите баланс с грузом, который вы используете. Опустите ваши плечи вниз к шкивам. Это - ваше исходное положение.
2. Сократите средние трапециевидные мышцы (Между вашими лопатками). Опустите ваши плечи назад и согните руки, отводя ваши локти назад к сокращаемым мышцам. Одновременно поворачивайте ладони к потолку. Согните ваши руки для обеспечения хорошего сокращения средних трапециевидных мышц.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время этого движения ваше туловище должно оставаться неподвижным. Избегайте качания назад и вперед.
Попеременное сжатие верхних трапециевидных мышц
1. Используйте перекрестную систему тросов и установите оба шкива на самом низком уровне. Встаньте между шкивами так, чтобы ваши носки были на 6-12 дюймов (15-30 сантиметров) позади тяговой линии. Захватите Тяговую Рукоятку (ТР) в обе руки. Вытяните руки прямо к шкивам на одну линию с тросами. Расположите тыльную сторону ваших рук таким образом, чтобы они были направлены вперед и слегка наклонитесь назад, держа вашу спину прямо, грудь вперед, и слегка согните ваши колени и бедра. Найдите баланс с грузом, который вы используете. Опустите ваши плечи вниз к шкивам. Это - ваше исходное положение.
2. Сократите трапециевидные мышцы и пожмите плечами. Поднимите плечи вверх к основанию головы, и потяните Тяговую Рукоятку (ТР) к вашим подмышкам, одновременно сгибая руки, отводя локти назад и поворачивая руки к потолку. Согните ваши руки для обеспечения хорошего сокращения верхних трапециевидных мышц.
3. Вернитесь к вашему исходному положению. Это одно повторение.
Замечание: Во время этого движения ваше туловище должно оставаться неподвижным. Избегайте качания назад и вперед.
Поворотное расширение трицепса
1. Начните с правой руки. Поместите шкив на уровне головы. Встаньте левым плечом к шкиву и ноги параллельно тяговой линии. Ваши ноги должны быть примерно на ширине плеч и носки отстоят приблизительно на 6 дюймов (15 сантиметров) от тяговой линии. Ваша левая нога должна отстоять на 6-12 дюймов (15-30 сантиметров) от шкива.
2. Захватите Тяговую Рукоятку (ТР) в правую руку тыльной стороной обращенной к направляющей. Опустите ваше плечо вниз вдоль правой стороны вашего тела. Согните руку в локте и поворачивайте ваше плечо немного вперед, чтобы ваше предплечье и запястье были направлены вверх к шкиву. Расположите вашу правую руку на левой стороне вашей груди ладонью к груди. Это - исходное положение.
3. Вытяните предплечье вниз к стороне вашего тела, поворачивая запястье и предплечье так, чтобы кончики пальцев были направлены вперед в конце движения.
4. Вернитесь к исходному положению. Это одно повторение. Измените направление с правой руки на левую руку.
Молотковое расширение трицепса
1. Начните с правой руки. Установите трос шкива приблизительно на уровне головы. Встаньте перед шкивом, чтобы ваше правое плечо было по середине шкива и ваши ноги перпендикулярны тяговой линии приблизительно на 12 дюймов (30 сантиметров) между пальцами ног и передней частью шкива.
2. Захватите тяговую ручку (ТР) в правую руку тыльной стороной обращенной к направляющей. Держите рукоятку в вертикальном положении, как если бы вы держали молоток и, таким образом, ваша ладонь направлена влево. Опустите плечо вниз и согните локоть, чтобы ваше предплечье и рука были направлены к шкиву. Это - исходное положение.
3. Вытяните руку вниз вдоль вашего тела. Не поворачивайте ваше запястье во время движения. Ваша ладонь должна все время быть направлена влево во время движения. Держите плечо неподвижным во время всего движения.
4. Вернитесь к исходному положению. Это одно повторение.
5. Измените направление с правой руки на левую руку.
Обратное расширение трицепса
1. Начните с правой руки. Установите трос шкива приблизительно на уровне головы. Встаньте перед шкивом, чтобы ваше правое плечо было по середине шкива и ваши ноги перпендикулярны тяговой линии приблизительно на 12 дюймов (30 сантиметров) между пальцами ног и передней частью шкива.
2. Захватите тяговую ручку (ТР) в правую руку тыльной стороной обращенной к направляющей. Держите рукоятку в вертикальном положении, как если бы вы держали молоток и, таким образом, ваша ладонь направлена влево. Опустите плечо вниз и согните локоть, чтобы ваше предплечье и рука были направлены к шкиву. Это - исходное положение.
3. Вытяните вашу руку вниз вдоль вашего тела, поворачивая кисть, запястье и предплечье вверх к потолку. Завершите движение ладонью вперед. Держите плечо неподвижным во время всего движения.
4. Вернитесь к исходному положению. Это одно повторение.
5. Измените направление с правой руки на левую руку.
Расширение трицепса
1. Начните с правой руки. Установите трос шкива приблизительно на уровне головы. Встаньте перед шкивом, чтобы ваше правое плечо было по середине шкива и ваши ноги перпендикулярны тяговой линии приблизительно на 12 дюймов (30 сантиметров) между пальцами ног и передней частью шкива.
2. Захватите тяговую ручку (ТР) в правую руку тыльной стороной обращенной к направляющей. Держите рукоятку в вертикальном положении, как если бы вы держали молоток и, таким образом, ваша ладонь направлена влево. Опустите плечо вниз и согните локоть, чтобы ваше предплечье и рука были направлены к шкиву. Это - исходное положение.
3. Вытягивайте вашу руку вниз, пока она не направлена вдоль вашего тела вниз, поворачивая кисть, запястье и предплечье вниз к полу. Завершите движение ладонью вниз. Держите плечо неподвижным во время движения.
4. Вернитесь к исходному положению. Это одно повторение.
5. Измените направление с правой руки на левую руку.

Заявленное изобретение относится к тренажерному оборудованию, а именно к эргономическим тяговым рукояткам. Представлена тяговая рукоятка, которая имеет эргономичную конструкцию, чтобы во всем диапазоне движения не допустить неестественного напряжения, действующего на тело пользователя. Изобретение позволяет пользователю выполнять упражнения, которые не могут быть выполнены с существующими рукоятками или которые делать с ними труднее. Эти цели достигаются путем обеспечения одной или нескольких осей поворота или гибкости в тяговой рукоятке, так что кисть, запястье и/или рука пользователя (или стопа, лодыжка и/или нога) может сгибаться и/или поворачиваться более естественно во всем диапазоне движения. Технический результат заключается в исключении травмоопасности при выполнении упражнений. 3 н. и 16 з.п. ф-лы, 10 ил.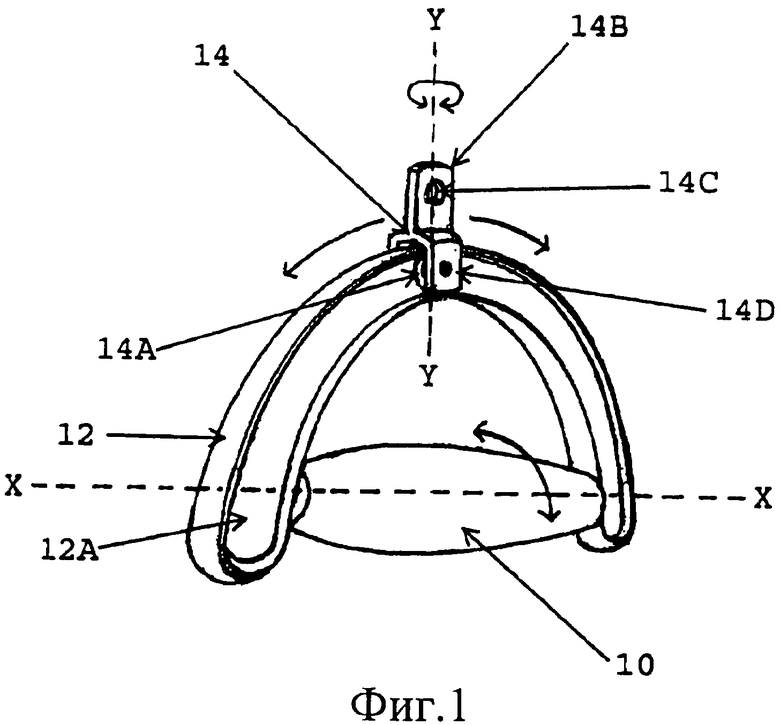
1. Тяговая рукоятка для выполнения упражнений, содержащая
изогнутый элемент, имеющий канавку,
захватную ручку, соединенную с возможностью поворота с изогнутым элементом, и
скобу, выполненную отдельно от захватной ручки и соединенную с изогнутым элементом с возможностью перемещения скобы вдоль канавки.
2. Тяговая рукоятка по п.1, в которой захватная ручка имеет отверстие, через которое проходит стержень, имеющий первый и второй концы, которые соединены с изогнутым элементом.
3. Тяговая рукоятка для выполнения упражнений, содержащая
изогнутый элемент, имеющий канавку,
захватную ручку, соединенную с возможностью поворота с изогнутым элементом,
скобу, соединенную с изогнутым элементом с возможностью ее перемещения вдоль канавки, причем скоба содержит колесо, которое перемещается по канавке.
4. Тяговая рукоятка по п.3, в которой канавка имеет С-образную форму.
5. Тяговая рукоятка по п.3, в которой колесо перемещается по длине канавки.
6. Тяговая рукоятка по п.1, в которой скоба содержит блок гладкого материала, который перемещается вдоль канавки.
7. Тяговая рукоятка по п.1, в которой скоба содержит устройство для прикрепления к тросу.
8. Тяговая рукоятка по п.1, в которой скоба выполнена с возможностью поворота вокруг оси.
9. Тяговая рукоятка по п.8, которая обеспечивает три степени подвижности.
10. Тяговая рукоятка по п.1, в которой изогнутый элемент содержит две съемные части, каждая из которых имеет отверстие, а захватная ручка содержит стержень, концы которого проходят за концы захватной ручки и взаимодействуют с указанными отверстиями.
11. Тяговая рукоятка для выполнения упражнений, содержащая
изогнутый элемент,
захватную ручку, соединенную с возможностью поворота с изогнутым элементом с обеспечением, тем самым, первой степени подвижности, и
скобу, установленную с возможностью скольжения на изогнутом элементе с обеспечением, тем самым, второй степени подвижности, причем скоба выполнена с возможностью поворота вокруг своей оси с обеспечением, тем самым, третьей степени подвижности.
12. Тяговая рукоятка по п.11, в которой захватная ручка содержит стержень, соединенный с изогнутым элементом, при этом захватная ручка выполнена с возможностью поворота вокруг стержня.
13. Тяговая рукоятка по п.11, в которой изогнутый элемент имеет канавку, а скоба содержит колесо, которое перемещается по канавке.
14. Тяговая рукоятка по п.11, в которой канавка имеет С-образную форму.
15. Тяговая рукоятка по п.11, в которой скоба содержит устройство для прикрепления к тросу.
16. Тяговая рукоятка по п.15, в которой указанное устройство расположено вдоль оси изогнутого элемента.
17. Тяговая рукоятка по п.13, в которой колесо перемещается по длине канавки.
18. Тяговая рукоятка по п.3, которая присоединена к тренажеру.
19. Тяговая рукоятка по п.3, которая присоединена к газонокосилке.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 4743018 A, 10,05,1988 | |||
| US 3384370 A, 21.05.1968 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

