ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в общем смысле, относится к области систем для изменения угла атаки лопаток рабочего колеса газотурбинного двигателя летательного аппарата, при этом этот тип системы также называется устройством для задания угла атаки или устройством для изменения шага.
Здесь, изобретение применяется к любому газотурбинному двигателю летательного аппарата, например турбовинтовому двигателю с одним рабочим колесом или турбовинтовому двигателю с двумя противоположно вращающимися рабочими колесами, т.е. двойным рядом противоположно вращающихся рабочих колес, например, типа "винтовентилятор".
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Система для изменения угла атаки лопаток рабочего колеса является известной из предшествующего уровня техники, на основе использования гидроцилиндра, поршень которого механически соединен с приводным колесом хвостовиков лопаток. Изменение угла атаки лопаток выполняется посредством изменения выходной амплитуды поршня.
Этот широко распространенный принцип тем не менее имеет недостаток, заключающийся в требовании существенного гидравлического контура, включении, дополнительно к цилиндру насоса, масляного резервуара и существенного трубопровода. Это является дорогостоящим с точки зрения массы и объема, поскольку рабочее колесо, включающее эту систему, уже является очень объемным вследствие наличия другого оборудования.
Кроме того, наличие гидравлического контура создает риск утечки масла, способного вызвать возгорание в газотурбинном двигателе.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следовательно, изобретение стремится, по меньшей мере, частично решить вышеупомянутые недостатки относительно вариантов осуществления предшествующего уровня техники.
С этой целью изобретение, в первую очередь, относится к системе для изменения угла атаки лопаток рабочего колеса газотурбинного двигателя летательного аппарата, при этом каждая лопатка смонтирована с возможностью поворачивания на втулке, вращающейся вдоль оси вращения указанного рабочего колеса, при этом указанная система содержит бесщеточный электродвигатель с осевым потоком, содержащий статор, оснащенный катушками, предназначенный для надежного монтажа на неподвижной части газотурбинного двигателя, а также ротор, оснащенный постоянными магнитами, при этом ротор и статор сцентрированы на оси вращения указанного рабочего колеса и расположены таким образом, что катушки размещены напротив указанных постоянных магнитов в направлении указанной оси вращения. Более того, она содержит механические соединительные средства между указанным ротором и указанными лопатками, и, более того, указанный ротор смонтирован подвижно в осевом направлении между заблокированным положением, в котором он прикреплен с возможностью вращения к вращающейся втулке, и разблокированным положением, в котором его вращение относительно указанной втулки вдоль оси вращения рабочего колеса вызывает, через посредство указанных механических соединительных средств, изменение угла атаки лопаток.
Использование бесщеточного электродвигателя с осевым потоком делает возможным исключить громоздкий гидравлический контур, встречающийся в предшествующем уровне техники, тем самым исключая риск утечки, связанный с наличием этого контура. В общем смысле, конструкция системы является упрощенной, и ее объем уменьшен, особенно рядом с приводным валом рабочего колеса.
Благодаря наличию осевого потока, этот электродвигатель, в действительности, может иметь существенный диаметр, значительно перемещая его от приводного вала рабочего колеса, где температурные условия существенно менее тяжелые.
Эта конструкция обеспечивает существенную гибкость для полного освобождения пространства в центре втулки от поддерживания средства управления шага, при этом это освобожденное пространство, в таком случае, является способным разместить понижающую передачу и/или противоположно вращающееся приводное устройство рабочего колеса. Следовательно, это значительно упрощает конструкцию последних элементов и тем самым гарантирует их бόльшую надежность.
Кроме того, в отличие от других возможных конструкций, она не требует передачи электрической энергии посредством скользящего контакта между неподвижной частью и вращательной частью электрического генератора, который представляет собой известный источник неисправности в этом типе окружающей среды.
Кроме того, большие диаметры, возможные с этим типом двигателя, являются благоприятными для низких номиналов и высоких крутящих моментов.
Изобретение, в общем смысле, обеспечивает простое, негромоздкое и надежное управление углом атаки лопаток рабочего колеса газотурбинного двигателя.
Предпочтительно, система выполнена таким образом, что осевое перемещение указанного ротора между его заблокированным положением и его разблокированным положением, и/или его обратное перемещение, выполняется посредством создания осевой силы отталкивания/притяжения между катушками и магнитами. Здесь, следовательно, именно катушки и магниты используются для обеспечения, по меньшей мере, одного из осевых перемещений ротора, посредством управления катушками надлежащим образом для получения требуемой силы отталкивания/притяжения. Предпочтительно, каждое из двух перемещений выполняется посредством осевой силы отталкивания, притяжения, соответственно, между катушками и магнитами. В случае выполнения только одного из двух перемещений посредством осевой силы отталкивания/притяжения, другое осевое перемещение может выполняться, используя упругие возвратные средства.
Другие принципы, известные специалистам в данной области техники, тем не менее могут рассматриваться для получения осевых перемещений ротора бесщеточного двигателя, не выходя за пределы объема изобретения.
Предпочтительно, система содержит механическое устройство для блокировки вращения ротора с вращательной втулкой, при этом устройство приводится в действие, когда ротор находится в его заблокированном положении. Например, это может представлять собой механическое устройство для блокировки вращения, содержащее зубчатые колеса.
Предпочтительно, указанные механические соединительные средства между указанным ротором и указанными лопатками содержат связанный с каждой лопаткой палец, скрепленный с указанным ротором, скользящий в полости рычага, закрепленного во вращении относительно связанной лопатки, вдоль его оси поворота. Тем не менее, другие конструкции могут рассматриваться, не выходя за пределы объема изобретения.
Предпочтительно, система также содержит, по меньшей мере, одно энергонакопительное устройство, предназначенное для вставки между ротором и вращательной втулкой, при этом указанное накопительное устройство предназначено для накапливания энергии во время вращения ротора с целью увеличения угла атаки лопаток. Таким образом, в случае инцидента, возникающего на газотурбинном двигателе, эта энергия может высвобождаться для возврата лопаток в их минимальный угол атаки для того, чтобы флюгировать рабочее колесо.
Изобретение также относится к рабочему колесу газотурбинного двигателя летательного аппарата, содержащему систему, как описана выше, использующуюся для управления углом атаки его лопаток.
Это рабочее колесо также включает втулку, сцентрированную на продольной оси, вал для приведения во вращение указанной втулку также сцентрированный на продольной оси, и множество лопаток, каждая смонтирована с возможностью поворачивания на указанной втулке вдоль оси поворота.
Предпочтительно, указанный ротор бесщеточного электродвигателя расположен вокруг указанной вращательной втулки, что, предпочтительно, дает ему очень большой диаметр.
Кроме того, изобретение также относится к газотурбинному двигателю летатательного аппарата, содержащему, по меньшей мере, одно рабочее колесо, как описано выше. Как упомянуто ранее, он может представлять собой турбовинтовой двигатель с одним рабочим колесом или турбовинтовой двигатель с двумя противоположно вращающимися рабочими колесами, например, типа "винтовентилятор". В этом последнем случае, каждое из двух рабочих колес, следовательно, имеет свою собственную систему для изменения угла атаки его лопаток.
В заключение, изобретение относится к способу управления углом атаки лопаток рабочего колеса газотурбинного двигателя летательного аппарата, используя систему, как описано выше. Для изменения угла атаки лопаток он содержит следующие этапы:
- разблокирование ротора бесщеточного электродвигателя посредством его перемещения в осевом направлении из его заблокированного положения в его разблокированное положение;
- вращение ротора для приведения лопаток в требуемый угол атаки; и
- блокировку ротора бесщеточного электродвигателя, посредством его перемещения в осевом направлении из его разблокированного положения в его заблокированное положение.
Предпочтительно, как упомянуто выше, по меньшей мере, один из этапов разблокирования выполняется посредством создания осевой силы отталкивания/притяжения между катушками и магнитами.
Другие преимущества и признаки изобретения будут очевидными в неограничивающем подробном описании ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Это описание будет выполняться с учетом прилагаемых чертежей, на которых:
- на фигуре 1 показан продольный разрез части рабочего колеса газотурбинного двигателя летательного аппарата в соответствии с одним предпочтительным вариантом осуществления настоящего изобретения;
- на фигуре 2 показан частичный вид, развернутый в плоскости, части рабочего колеса на фигуре 1, рассматриваемый радиально снаружи;
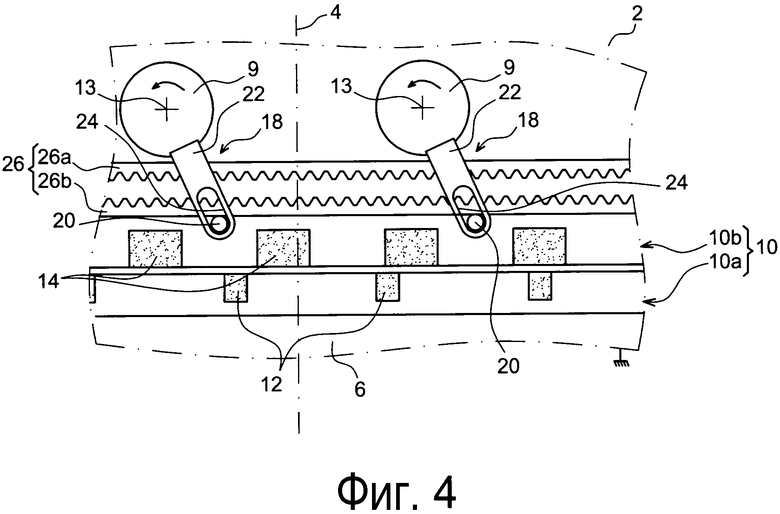
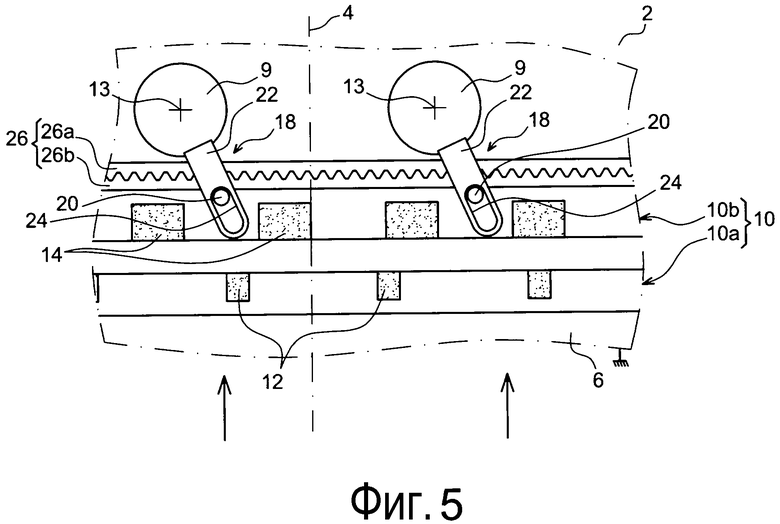
- на фигурах 3-5 изображена операция для изменения угла атаки лопаток, используя специальную систему, предусмотренную в рабочем колесе, при этом система для изменения угла атаки лопаток также является целью настоящего изобретения;
- на фигурах 6а и 6b показана первая возможная конфигурация магнитов и катушек, предусмотренных в бесщеточном двигателе с осевым потоком системы для изменения угла атаки;
- на фигурах 6с и 6d показана вторая возможная конфигурация магнитов и катушек для указанного бесщеточного двигателя;
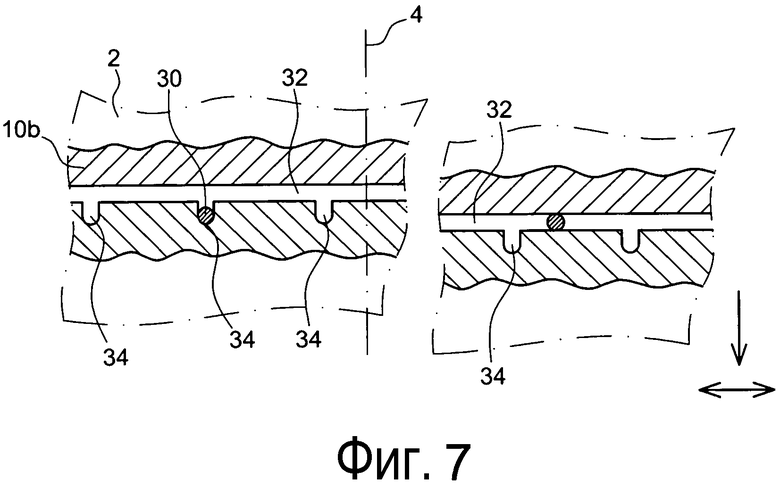
- на фигуре 7 показан частичный вид, развернутый в плоскости, части рабочего колеса на фигуре 1, показывающий возможное взаимодействие между ротором бесщеточного двигателя и вращательной втулкой рабочего колеса;
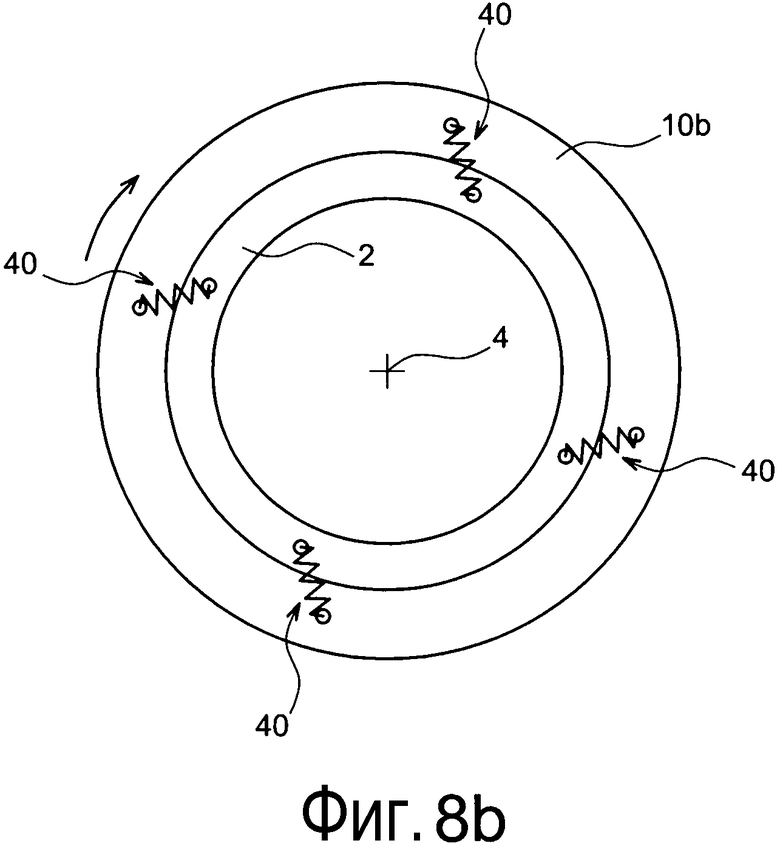
- на фигурах 8а и 8b схематично показано энергонакопительное устройство, вставленное между ротором бесщеточного двигателя и втулкой, поддерживающей лопатки;
- на фигурах 9а и 9b показаны виды, аналогичные видам на фигурах 3 и 4, с механическими соединительными средствами между ротором и лопатками, принимающими форму альтернативного варианта осуществления; и
- на фигуре 10 показан перспективный вид с частичным разнесением деталей части рабочего колеса газотурбинного двигателя летательного аппарата в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фигуре 1 показано рабочее колесо 1 газотурбинного двигателя летательного аппарата, предпочтительно представляющего собой тип турбовинтового двигателя с одним рабочим колесом.
Рабочее колесо 1 содержит втулку или диск 2, сцентрированный на продольной оси 4 рабочего колеса, при этом указанный диск смонтирован с возможностью вращения относительно статора 6 рабочего колеса вдоль оси 4. Оно вращается посредством приводного вала 8, также сцентрированного на продольной оси 4, при этом указанный вал способен быть выходным валом коробки скоростей, приводимой в движение посредством газового генератора газотурбинного двигателя, или выходным валом указанного газового генератора. Постоянный крутящий момент вала 8 с втулкой 2 был выполнен традиционным образом, как известно специалистам в данной области техники.
На ее периферии, втулка 2 поддерживает множество лопаток 9 рабочего колеса, например десять или больше, каждая смонтирована с возможностью поворачивания в соответствующем отверстии 11 втулки 2 вдоль оси 13 поворота. Все оси 13 поворота расположены в одной и той же плоскости, ортогонально относительно оси 4 рабочего колеса и предпочтительно радиально ориентированы.
Рабочее колесо 1 также содержит систему 100 для изменения угла атаки лопаток, обеспечивающую возможность одновременного управления их углами атаки.
Эта система 100 содержит бесщеточный электродвигатель 10 с осевым потоком, содержащий статор 10а, надежно смонтированный на статоре 6 рабочего колеса и оснащенный катушками 12, а также ротор 10b, оснащенный постоянными магнитами 14 и смонтированный вокруг вращательной втулки 2. Кроме того, двигатель содержит средство 16 управления, делающее возможным управление электрической мощностью катушек, при этом этот тип средства управления является известным специалистам в данной области техники.
Ротор 10b и статор 10а сцентрированы на оси вращения рабочего колеса, соответствующей оси 4. Для обеспечения осевого потока между ними они расположены таким образом, что катушки 12 являются противоположными постоянным магнитам 14 в направлении указанной оси 4 вращения. Следовательно, ротор 10b и статор 10а имеют существенный диаметр и расположены таким образом, что катушки 12 и постоянные магниты 14 расположены радиально наружу относительно части хвостовиков лопаток, размещенных в отверстиях 11 втулки 2.
Статор 10а принимает форму короны, неподвижно поддерживающей, например, в соответствующих гнездах этой короны катушки 12, разнесенные в окружном направлении друг от друга, например, которых имеется девять. Ротор 10b также принимает форму короны, неподвижно поддерживающей, например, в соответствующих гнездах указанной короны постоянные магниты 14, разнесенные в окружном направлении друг от друга, и, например, которых имеется четырнадцать, при этом их количество меньше, чем количество катушек.
Этот тип бесщеточного двигателя работает посредством создания, используя средство 16 управления, вращающегося поля в катушках 12. Чтобы заставить ротор вращаться в первом направлении вращения, поле должно вращаться в опережающей фазе вращения, и наоборот, чтобы вращать ротор в противоположном направлении вращения.
Система 100 также содержит соединительные средства между ротором 10b и лопатками 9. Эти средства, в общем обозначенные ссылочной позицией 18 на фигуре 1, будут описаны со ссылкой на фигуры 2. На этой фигуре можно увидеть, что каждая лопатка 9 связана с ее собственным соединительным средством 18 с ротором 10b, при этом указанное средство здесь состоит из пальца 20, прикрепленного к ротору 10b и выступающего радиально наружу, а также рычага 22, прикрепленного во вращении относительно его связанной лопатки 9, на оси 13 поворота. Кроме того, рычаг 22 имеет полость 24, в которой скользит палец 20.
Система 100 также содержит механическое устройство 26 для блокировки вращения ротора 10b с вращательной втулкой 2, при этом указанное устройство здесь содержит первое зубчатое колесо 26а, центрированное на оси 4 и скрепленное с венцом ротора 10b, а также второе зубатое колесо 26b с таким же диаметром, центрированное на оси 4 и скрепленное с втулкой 2. На фигуре 2 можно увидеть механическое устройство 26 в его сцепленной конфигурации, полученной благодаря зацеплению зубьев двух колес 26а, 26b, предотвращающей относительное вращение ротора 10b относительно втулки 2. Как теперь будет описываться, ротор 10b, расположенный таким образом, занимает так называемое заблокированное положение в противоположность так называемому разблокированному положению, которое он также может занимать.
В действительности, одна из особенностей настоящего изобретения заключается в том факте, что ротор 10b смонтирован подвижно в осевом направлении между заблокированным положением фигуры 2, в котором скреплен во вращении с вращательной втулкой 2, и разблокированным положением, в котором его вращение относительно втулки вызывает, через посредство механических соединительных средств 18, изменение угла атаки лопаток 9.
В этом отношении теперь будет описываться операция изменения угла атаки лопаток со ссылкой на фигуры 2-5. На фигуре 2, сцепление механического устройства 26, следовательно, предотвращает относительное вращение ротора 10b и втулки 2, которые совместно приводятся в движение посредством приводного вала, причем лопатки 9 занимают заданный угол атаки, поддерживающийся до тех пор, пока механическое устройство 26 остается сцепленным. Когда является необходимым изменить угол атаки лопаток, сначала ротор 10b разблокируется, посредством перемещения в осевом направлении в его разблокированное положение, в котором располагается на расстоянии от зубчатого колеса 26b, как показано на фигуре 3, и подводится ближе к статору 10а. Вследствие скольжения ротора 10b по втулке 2 в осевом направлении сцепление зубьев колес 26а, 26b разрывается. Кроме того, во время этого перемещения ротора 10b каждый палец 20 также скользит в его связанной полости 24, по существу по всей ее длине.
Затем, средство 16 управления двигателем подает мощность на катушки для того, чтобы вращать ротор 10b на заданную угловую амплитуду, заставляя лопатки 9 приводиться в требуемый угол атаки через посредство механических соединительных средств 18. Как изображено на фигуре 4, вращение пальцев 20 посредством ротора 10b заставляет их связанный рычаг 22 поворачиваться вдоль оси 13, который затем вращает всю лопатку 9 во вращении вдоль этой же самой оси.
Как только достигнут требуемый угол атаки, ротор 10b блокируется посредством перемещения в осевом направлении в его заблокированное положение, в котором он снова подводится ближе к зубчатому колесу 26b, как показано на фигуре 5, и перемещается от статора 10а. В результате скольжения ротора 10b по втулке 2 в осевом направлении сцепление зубьев колес 26а, 26b снова достигается, таким образом угол атаки лопаток больше не может изменяться до выполнения новой операции для изменения угла атаки, аналогичной только что описанной операции.
Для информации, следует отметить, что для зацепления зубьев с целью только незначительного изменения или совсем без изменения угла атаки лопаток шаг зубьев колес 26а, 26b является близким или идентичным шагу для управления углом атаки лопаток.
Этот предпочтительный вариант осуществления выполнен таким образом, что относительное угловое положение ротора 10b и втулки 2 не изменяется во время осевых перемещений ротора 10b, для того чтобы непреднамеренно не изменять угол атаки лопаток. Электромагнитное решение для приведения ротора в движение, которое будет описываться ниже, представляет собой одну возможность, рассматриваемую для получения такой функции.
Также следует отметить, что конфигурация механического соединительного средства 18 является такой, что она может потенциально вызывать изменение угла атаки лопаток во время осевого перемещения ротора 10b, предназначенного для его разблокировки, даже когда последний не перемещается в угловом направлении относительно втулки 2 во время такого осевого перемещения. В таком сценарии это паразитное перемещение учитывается в величине вращения ротора, таким образом полученный угол атаки лопаток в конце модификационной операции представляет собой требуемое изменение. Другими словами, если предполагается, что такое паразитное перемещение происходит, то вращение ротора 10b останавливается в положении, в котором он размещает лопатки 9 с другим углом атаки, чем угол атаки, который будет получен в конечном счете, после блокировки указанного ротора 10b.
Как упомянуто выше, блокировка и разблокировка ротора 10b может разумно выполняться, используя электродвигатель 10, управляемый особенным образом, и не используя дополнительное приводное устройство, хотя эта опция остается возможной.
Для разблокировки катушки и постоянные магниты используются таким образом, чтобы создавать силу притяжения, заставляющую ротор 10b перемещаться в осевом направлении к статору 10а. Более конкретно, катушки 12 управляются таким образом, чтобы получить неподвижное осевое поле во вращающейся системе координат. Для создания этого поля от статора 10а, катушки 12 переключаются на ту же скорость, как скорость вращения втулки 2, для того чтобы иметь, все время, бόльшую часть катушек и магнитов в противоположных направлениях, обращенных друг к другу, для создания вышеупомянутой силы притяжения. Это поле, при наблюдении от ротора 10b, имеет постоянную осевую ориентацию, тогда как при наблюдении от статора, оно также имеет постоянную осевую ориентацию, но вращается со скоростью ротора 10b и втулки 2.
На фигуре 6а показано схематическое изображение, развернутое в плоскости, катушек 12 и магнитов 14, составляющих бесщеточный двигатель 10. В принятой конфигурации с девятью катушками и четырнадцатью магнитами, в действительности, является возможным управлять полярностями катушек 12 таким образом, что в каждый момент каждая из них имеет как можно бόльшую поверхность напротив магнита с противоположной полярностью. Здесь, в наиболее предпочтительном случае, 60% всей поверхности катушек располагается напротив магнита с противоположной полярностью, что является достаточным для получения требуемой силы притяжения, даже если ротор может вибрировать вследствие противодействующей силы, прикладываемой к нему, образованной остальными 40% площади поверхности. То же является справедливым, когда требуется отталкивающая сила, нужная для этапа блокировки, в случае чего полярности катушек 12 управляются таким образом, что каждый момент каждая из них имеет как можно бόльшую поверхность напротив магнита с той же полярностью, как показано на фигуре 6b. В этом отношении, на этих фигурах, темно-серый соответствует положительной полярности, тогда как светло-серый соответствует отрицательной полярности.
На фигурах 6с и 6d показан другой предпочтительный вариант осуществления, в котором каждая катушка 12 разделена на две отдельные части 12а, 12b, которые могут принимать идентичные или противоположные полярности. Максимальная поверхность перекрывания, в таком случае, может быть увеличена с 60% до 75%, что способствует получению более интенсивной силы отталкивания/притяжения и уменьшает действия вибрации ротора.
Следует отметить, что в предпочтительном варианте осуществления, описанном выше, сила отталкивания создается двигателем 10 не только во время этапа блокировки ротора 10b, но также когда последний находится в заблокированном положении, для того чтобы поддерживать зацепление зубьев двух колес 26а, 26b устройства 26 для блокировки вращения ротора 10b.
На фигуре 7 показан способ обеспечения того, что во время фазы для приведения ротора 10b во вращение на втулке 2, выполняемой для изменения угла атаки лопаток, указанный ротор не перемещается в осевом направлении относительно указанной втулки. С этой целью, последняя оснащена одним или более штифтами 30, выступающими наружу, тогда как ротор 10b имеет, на его внутренней поверхности, канавку 32, одна боковая стенка которой имеет гнезда 34, равномерно разнесенные на расстояние, соответствующее шагу для управления углом атаки лопаток. Когда ротор находится в заблокированном положении, как показано на левой части фигуры 7, каждый штифт 30 вставлен в одно из гнезд 34. В результате это приводит к вращательной блокировке ротора относительно втулки, при этом указанная система является способной выполнять блокировку устройства 26 или заменять его. С другой стороны, после разблокировки ротора 10b, каждый штифт 30 размещается в канавку 32 таким образом, что, когда он расположен между двумя гнездами 34, как показано на правой части фигуры 7, относительное осевое перемещение не является возможным между вращающимся ротором и втулкой 2.
Для придания функции безопасности, также называемой "отказоустойчивостью", система 100 может быть оснащена несколькими энергонакопительными устройствами 40, вставленными между ротором 10b и вращательной втулкой 2. Здесь, каждое устройство 40 принимает форму пружины или эквивалентного средства, оба конца которого соответственно смонтированы на элементах 10b, два, при этом эти пружины выполнены с возможностью накопления энергии во время вращения ротора, предназначенного для увеличения угла атаки лопаток. С этой конфигурацией, в случае инцидента, возникающего на газотурбинном двигателе, энергия, ранее накопленная в устройствах 40, автоматически высвобождается, как только вращение ротора относительно втулки 2 разблокируется. Высвобождение этой энергии производит относительное вращение ротора относительно втулки, в направлении, которое приводит лопатки в их минимальный угол атаки, тем самым делая возможным флюгирование рабочего колеса. В этом отношении, на фигуре 8а показана конструкция с устройствами 40 во время вращения ротора 10b с целью увеличения угла атаки лопаток, тогда как на фигуре 8b показана та же самая конструкция во время высвобождения энергии, ранее накопленной пружинами.
Решение накапливания гидравлической энергии также может рассматриваться, не выходя за пределы объема изобретения.
На фигурах 9а и 9b показаны механические соединительные средства между ротором и лопатками, принимающие форму альтернативного варианта осуществления. Здесь, эти средства 18 по-прежнему содержат связанный с каждой лопаткой 9 рычаг 22, скрепленный во вращении с ней, вдоль оси 13 поворота. Тем не менее, дистальный конец каждого рычага 22 шарнирно соединен на общем кольце 42, сцентрированном на оси 4 и предпочтительно расположенном вокруг ротора 10b. Средства 18 также содержат один или более ведущих пальцев 20, скрепленных с ротором 10b, выступающих радиально наружу и каждый скользящий в осевой полости 24, обеспеченной на кольце 42. Тем не менее, здесь, количество штифтов и полостей может быть существенно меньше, чем количество лопаток рабочего колеса, в отличие от варианта осуществления, показанного на предшествующих фигурах. Таким образом, в положении блокировки ротора, как показано на фигуре 9а, каждый палец 20 расположен в одном конце его связанной полости, затем скользит к противоположному концу во время разблокировки ротора 10b, перемещаясь в осевом направлении. В этом положении, относительное вращение ротора относительно втулки, изображенное на фигуре 9b, приводит к вращению кольца 42 вокруг оси 4 благодаря пальцам 20, а также поворачиванию каждого рычага 22 вокруг его оси 13, приводя к изменению угла атаки связанной лопатки 9.
В заключение, на фигуре 10 показан другой предпочтительный вариант осуществления настоящего изобретения, который отличается от предшествующего варианта осуществления по существу конструкцией механических соединительных средств 18 между ротором и лопатками. Эти средства здесь содержат зубчатое колесо 18а, сцентрированное на оси 4, которое является составной частью ротора 10b бесщеточного электродвигателя 10. Кроме того, они включают в себя связанное с каждой лопаткой 9 зубчатое колесо 18b, прикрепленное во вращении к хвостовику связанной лопатки. Таким образом, в заблокированном положении ротора 10b, в котором он подводится ближе к статору 10а, в противоположность предшествующему варианту осуществления, отсутствие зацепления между колесами 18а, 18b предотвращает изменение угла атаки лопаток посредством зубчатого колеса 18а. В этом отношении, на фигуре 10, устройство для блокировки вращения ротора 10b относительно втулки 2 не было показано, тем не менее указывая, что оно может принимать любую форму, рассматриваемую подходящей специалистом в данной области техники. Кроме того, в этом положении, лопатки 9 могут поддерживаться с их углом атаки посредством дополнительных систем, также известных специалистам в данной области техники. Следовательно, механические соединительные средства 18 здесь принимают расцепляемый характер.
Кроме того, после перемещения в осевом направлении в его разблокированное положение, где он перемещен от статора 10а, ротор 10b зацепляется с колесами 18b через посредство колеса 18а, которое он поддерживает, таким образом его вращение вызывает изменение угла атаки лопаток.
Конечно, различные изменения могут быть выполнены специалистом в данной области техники относительно только что описанного изобретения, только в качестве неограничивающих примеров.











Система изменения угла атаки лопаток рабочего колеса, смонтированных на втулке, вращающейся вдоль оси рабочего колеса, содержит бесщеточный электродвигатель и механические соединительные средства. Электродвигатель включает статор, оснащенный катушками, предназначенный для надежного монтажа на неподвижной части газотурбинного двигателя, а также ротор, оснащенный постоянными магнитами. Ротор и статор сцентрированы на оси вращения рабочего колеса и расположены таким образом, что катушки размещены напротив постоянных магнитов в направлении оси вращения. Механические соединительные средства расположены между ротором и лопатками. Ротор смонтирован подвижно в осевом направлении между заблокированным положением, в котором он прикреплен к вращающейся втулке, и разблокированным положением, в котором его вращение относительно указанной втулки вдоль оси вращения рабочего колеса вызывает посредствам механических соединительных средств изменение угла атаки лопаток. Другие изобретения группы относятся к рабочему колесу газотурбинного двигателя летательного аппарата, содержащему указанную выше систему, а также к газотурбинному двигателю, включающему такое рабочее колесо. При управлении углом атаки лопаток рабочего колеса разблокируют ротор бесщеточного электродвигателя посредством его перемещения в осевом направлении из заблокированного в разблокированное положение. Вращают ротор для приведения лопаток в требуемый угол атаки и блокируют ротор электродвигателя посредством его перемещения в осевом направлении из разблокированного в заблокированное положение. Группа изобретений позволяет повысить надежность и упростить систему управления углом атаки лопаток рабочего колеса. 4 н. и 8 з.п. ф-лы, 15 ил.
1. Система (100) для изменения угла атаки лопаток (9) рабочего колеса газотурбинного двигателя летательного аппарата, при этом каждая лопатка смонтирована с возможностью поворачивания на втулке (2), вращающейся вдоль оси (4) вращения указанного рабочего колеса, при этом указанная система отличается
тем, что она содержит бесщеточный электродвигатель (10) с осевым потоком, содержащий статор (10а), оснащенный катушками (12), предназначенный для надежного монтажа на неподвижной части газотурбинного двигателя, а также ротор (10b), оснащенный постоянными магнитами (14), при этом ротор и статор сцентрированы на оси (4) вращения упомянутого рабочего колеса и расположены таким образом, что катушки размещены напротив указанных постоянных магнитов в направлении указанной оси вращения,
тем, что она также содержит механические соединительные средства (18) между указанным ротором (10b) и указанными лопатками (9),
и тем, что указанный ротор (10b) смонтирован подвижно в осевом направлении между заблокированным положением, в котором он прикреплен с возможностью вращения к вращающейся втулке (2), и разблокированным положением, в котором его вращение относительно указанной втулки вдоль оси вращения рабочего колеса вызывает, через посредство указанных механических соединительных средств (18), изменение угла атаки лопаток.
2. Система по п.1, отличающаяся тем, что система выполнена таким образом, что осевое перемещение указанного ротора (10b) между его заблокированным положением и его разблокированным положением, и/или его обратное перемещение, выполняется посредством создания осевой силы отталкивания/притяжения между катушками (12) и магнитами (14).
3. Система по п.1, отличающаяся тем, что она содержит механическое устройство (26) для блокировки вращения ротора с вращательной втулкой, при этом устройство приводится в действие, когда ротор (10b) находится в его заблокированном положении.
4. Система по п.3, отличающаяся тем, что механическое блокирующее вращение устройство содержит зубчатые колеса (26а, 26b).
5. Система по п.1, отличающаяся тем, что указанные механические соединительные средства (18) между указанным ротором и указанными лопатками содержат связанный с каждой лопаткой (9) палец (20), скрепленный с указанным ротором, скользящий в полости (24) рычага (22), закрепленного во вращении относительно связанной лопатки, вдоль его оси (13) поворота.
6. Система по п.1, отличающаяся тем, что она также содержит, по меньшей мере, одно энергонакопительное устройство (40), предназначенное для вставки между ротором (10b) и вращательной втулкой (2), при этом указанное накопительное устройство предназначено для накапливания энергии во время вращения ротора с целью увеличения угла атаки лопаток.
7. Рабочее колесо (1) газотурбинного двигателя летательного аппарата, содержащее систему (100) по п.1.
8. Рабочее колесо по п.7, также включающее втулку (2), центрированную на продольной оси (4), вал (8) для приведения во вращение указанной втулки (2), также центрированный на продольной оси (4), и множество лопаток (9), каждая смонтирована с возможностью поворачивания на указанной втулке (2) вдоль оси (13) поворота.
9. Рабочее колесо по п.8, отличающееся тем, что ротор (10b) бесщеточного электродвигателя расположен вокруг указанной вращательной втулки (2).
10. Газотурбинный двигатель летательного аппарата, содержащий по меньшей мере одно рабочее колесо (1) по п.7.
11. Способ управления углом атаки лопаток рабочего колеса газотурбинного двигателя летательного аппарата, используя систему (100) по п.1, отличающийся тем, что для изменения угла атаки лопаток он содержит следующие этапы:
- разблокирование ротора бесщеточного электродвигателя посредством его перемещения в осевом направлении из его заблокированного положения в его разблокированное положение;
- вращение ротора для приведения лопаток в требуемый угол атаки; и
- блокировку ротора бесщеточного электродвигателя посредством его перемещения в осевом направлении из его разблокированного положения в его заблокированное положение.
12. Способ по п.11, отличающийся тем, что по меньшей мере один из этапов разблокирования выполняется посредством создания осевой силы отталкивания/притяжения между катушками и магнитами.
| US 4591313 A, 27.05.1986 | |||
| СПОСОБ ЛЕЧЕНИЯ РАСПРОСТРАНЕННЫХ ОПУХОЛЕЙ ВЕРХНЕЙ ЧЕЛЮСТИ | 1991 |
|
RU2028099C1 |
| US 5282719 A, 01.02.1994 | |||
| US 5451141 A, 19.09.1995 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ УГЛОВ УСТАНОВКИ РАБОЧИХ ЛОПАТОК ВЕНТИЛЯТОРА ТУРБОДВИГАТЕЛЯ И СПОСОБ РЕГУЛИРОВАНИЯ ВЕНТИЛЯТОРА ТУРБОДВИГАТЕЛЯ | 1994 |
|
RU2107194C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ РЕВЕРСИВНЫМ ВИНТОВЕНТИЛЯТОРОМ | 1996 |
|
RU2101212C1 |

