ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к общей области газотурбинных двигателей, таких как двухконтурные и двухкорпусные турбореактивные двигатели для летательных аппаратов. Более конкретно, изобретение касается системы, обеспечивающей приведение во вращение ротора газотурбинного двигателя во время контроля качества или технического обслуживания газотурбинного двигателя.
УРОВЕНЬ ТЕХНИКИ
Как правило, двухконтурный и двухкорпусной турбореактивный двигатель содержит, от входа к выходу по направлению прохождения газов, вентилятор, компрессор низкого давления, компрессор высокого давления, камеру сгорания, турбину высокого давления, турбину низкого давления и выпускную трубу для отработавших газов. Вентилятор, компрессоры и турбины состоят из первого узла неподвижных деталей, называемого статором, и из второго узла деталей, который может приводиться во вращение относительно статора и который называется ротором.
В частности, роторы турбореактивного двигателя содержат один или множество дисков, на периферии которых закреплены лопатки. Они могут быть связаны между собой через различные трансмиссионные системы. Например, роторы компрессора низкого давления и турбины низкого давления образуют корпус низкого давления и связаны друг с другом через вал низкого давления. Точно так же, роторы компрессора высокого давления и турбины высокого давления образуют корпус высокого давления и связаны друг с другом через вал высокого давления, расположенный вокруг вала низкого давления. Валы низкого давления и высокого давления центрованы по продольной оси турбореактивного двигателя и не связаны между собой механически. Ротор вентилятора, окруженный в радиальном направлении кожухом вентилятора, приводится во вращение напрямую или опосредованно (например, через редуктор) валом низкого давления.
Статор компрессоров и турбин содержит, в частности, наружный кольцевой кожух и неподвижные лопаточные колеса, закрепленные на кольцевом кожухе. Эти неподвижные лопаточные колеса направлены в радиальном направлении внутрь кольцевого кожуха и действуют как спрямляющие или направляющие аппараты для газового потока (в зависимости от того, идет ли речь о компрессоре или о турбине).
Поставке турбореактивного двигателя на авиастроительный завод всегда предшествует приемочный контроль, позволяющий убедиться в соответствии турбореактивного двигателя техническим требованиям. Этот приемочный контроль включает в себя, в частности, этап эндоскопии для проверки отсутствия дефектов (следов от ударов, трещин…) внутри различных участков турбореактивного двигателя. Эндоскопическое выявление дефектов производят, в частности, для лопаток, дисков и кожухов вентилятора, компрессоров (низкого давления и высокого давления) и турбин (низкого давления и высокого давления).
Для контроля всех лопаток вентилятора, компрессора или турбины необходимо проворачивать соответствующий ротор. Для этого можно использовать систему приведения во вращение ротора газотурбинного двигателя. Современная приводная система содержит первую часть, оснащенную приводным двигателем, которую крепят на конце вала вентилятора, и вторую часть (или силовую штангу), которую крепят на фланцах кожуха вентилятора.
Однако эта приводная система не является практичной в использовании, так как ее установка на турбореактивный двигатель и ее снятие с турбореактивного двигателя представляют собой длительные и трудоемкие операции. В частности, перед креплением первой части на конце вала вентилятора необходимо снять входной конус турбореактивного двигателя. Кроме того, манипулирование системой является сложным, поскольку она является тяжелой и громоздкой. Это манипулирование требует присутствия двух операторов, чтобы ограничивать профессиональные риски.
Как следствие, от современной приводной системы часто отказываются и производят вращение ротора вручную. Это решение тоже требует присутствия двух операторов, один из которых обеспечивает контроль деталей при помощи эндоскопа, а другой вручную прокручивает ротор при помощи лопаток.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Таким образом, существует потребность в системе приведения во вращение ротора газотурбинного двигателя, которая является компактной и выполнена с возможностью легкой и быстрой установки на газотурбинном двигателе, чтобы ею мог безопасно манипулировать один человек.
Для удовлетворения этой потребности первым объектом изобретения является система для приведения во вращение ротора газотурбинного двигателя относительно кожуха статора, при этом ротор содержит кольцевой ряд лопаток, при этом приводная система содержит:
- держатель, первый конец которого выполнен с возможностью удержания передней кромки первой лопатки кольцевого ряда и второй конец которого выполнен с возможностью удержания задней кромки первой лопатки;
- электрический двигатель, содержащий вал и корпус, закрепленный на держателе;
- колесо, связанное с валом двигателя и имеющее поверхность качения, при этом колесо расположено таким образом, чтобы поверхность качения могла входить в контакт с кольцевой стенкой кожуха статора, когда держатель установлен на первой лопатке.
Благодаря держателю, заявленную приводную систему можно установить непосредственно на лопатке ротора. В частности, держатель располагают на уровне одного из концов лопатки (вершины или ножки), чтобы колесо системы могло опираться на кольцевую (наружную или внутреннюю) стенку кожуха статора и сообщать ротору движение вращения. Поскольку доступ к лопаткам роторов, в частности, к лопаткам ротора вентилятора является легким, установку приводной системы производят просто и быстро. В частности, она не требует никакого предварительного демонтажа, например, демонтажа входного конуса. Снятие приводной системы газотурбинного двигателя тоже является легким. Кроме того, учитывая, что длина держателя имеет тот же порядок величины, что и ширина лопатки (то есть расстояние, разделяющее переднюю и заднюю кромки лопатки), заявленная приводная система является относительно компактной. Ею может легко манипулировать всего один человек.
В первом варианте выполнения приводная система содержит по меньшей мере одну батарею, неподвижно закрепленную на держателе и электрически соединенную с двигателем.
Во втором варианте выполнения приводная система дополнительно содержит:
- держатель батареи, выполненный с возможностью установки на второй лопатке кольцевого ряда, диаметрально противоположной относительно первой лопатки; и
- по меньшей мере одну батарею, неподвижно закрепленную на держателе батареи и электрически соединенную с электрическим двигателем.
Согласно признаку второго варианта выполнения, держатель батареи содержит первый конец, выполненный с возможностью удержания передней кромки второй лопатки, и второй конец, выполненный с возможностью удержания задней кромки второй лопатки.
Согласно другому признаку второго варианта выполнения:
- держатель, электрический двигатель и колесо принадлежат к первому подузлу элементов, предназначенному для установки на первой лопатке;
- держатель батареи и упомянутая по меньшей мере одна батарея принадлежат к второму подузлу элементов, предназначенному для установки на второй лопатке; и
- первый и второй подузлы элементов имеют по существу одинаковую массу.
Приводная система, являющаяся первым объектом изобретения, может также иметь один или несколько указанных ниже признаков, рассматриваемых отдельно или во всех технически возможных комбинациях:
- двигатель и колесо расположены между первым и вторым концами держателя;
- первый конец держателя содержит зажим, и второй конец держателя выполнен в виде крючка;
- электрический двигатель является шаговым двигателем;
- колесо оснащено редуктором; и
- держатель выполнен из полимерного материала, такого как полимолочная кислота (ПЛА).
Вторым объектом изобретения является ротор газотурбинного двигателя, в частности, ротор вентилятора двухконтурного турбореактивного двигателя, оснащенный приводной системой, являющейся первым объектом изобретения.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на следующие прилагаемые фигуры:
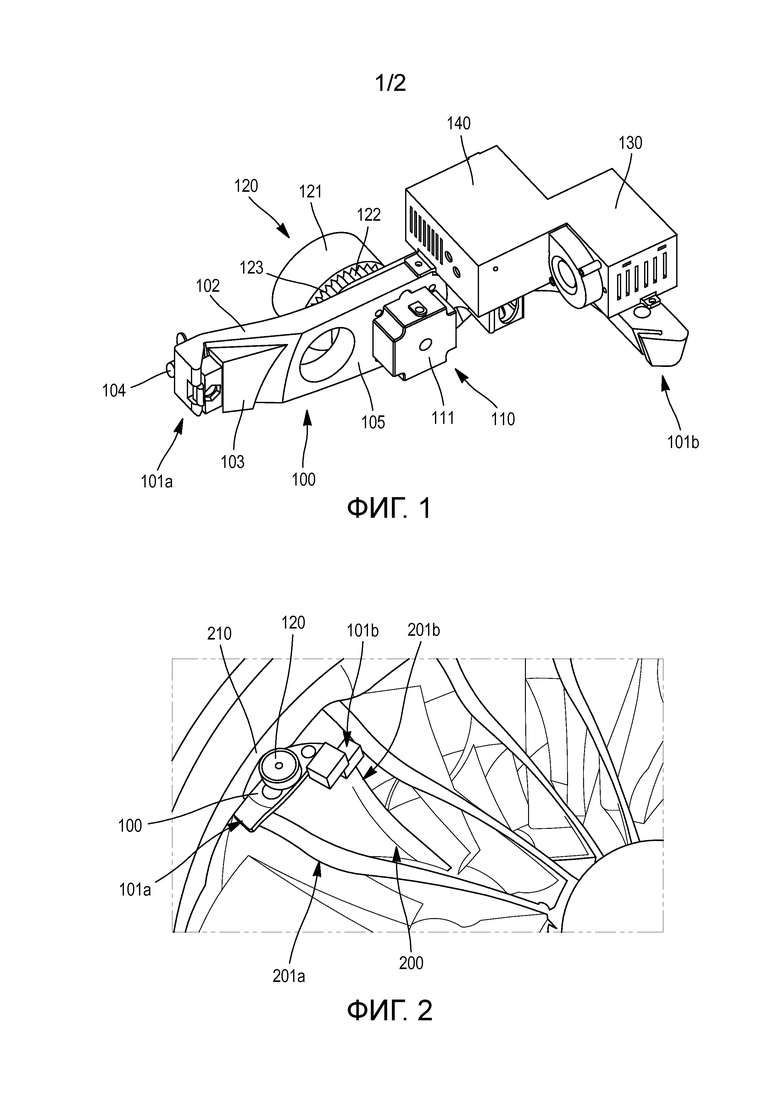
Фиг. 1 - вид в перспективе системы привода ротора газотурбинного двигателя согласно первому варианту выполнения изобретения.
Фиг. 2 - приводная система, показанная на фиг. 1, установленная на колесе вентилятора двухконтурного турбореактивного двигателя.
Фиг. 3 - приводная система согласно второму варианту выполнения изобретения, установленная в вентиляторе двухконтурного турбореактивного двигателя.
Фиг. 4 - узел приводной системы, показанной на фиг. 3, состоящий из батарей и их держателя, в положении на второй противоположной лопатке вентилятора.
Для большей ясности идентичные или аналогичные элементы на всех фигурах имеют одинаковые обозначения.
ПОДРОБНОЕ ОПИСАНИЕ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ВАРИАНТА ВЫПОЛНЕНИЯ
В дальнейшем тексте описания термины «вход» и «выход» следует рассматривать относительно главного направления нормального потока газов (от входа к выходу) в газотурбинном двигателе. Кроме того, осью (продольной) газотурбинного двигателя называется ось вращения газотурбинного двигателя. Осевое направление газотурбинного двигателя соответствует направлению оси газотурбинного двигателя. Радиальное направление газотурбинного двигателя является направлением, перпендикулярным к оси газотурбинного двигателя. Если только не указано иное, прилагательные и наречия «осевой», «радиальный», «аксиально» и «радиально» используются относительно вышеупомянутых осевого и радиального направлений. Кроме того, если не указано иное, термины «внутренний» или «наружный» используются относительно радиального направления, то есть внутренняя часть элемента находится ближе к оси газотурбинного двигателя, чем наружная часть этого же элемента.
На фиг. 1 представлен первый вариант выполнения системы, обеспечивающей приведение во вращение ротора газотурбинного двигателя, например, во время приемочного контроля или технического обслуживания газотурбинного двигателя. Эта приводная система предназначена для любого типа газотурбинного двигателя, как наземного, так и авиационного (турбореактивный двигатель, турбовинтовой двигатель, наземная газовая турбина…), который содержит по меньшей мере один ротор, оснащенный кольцевым рядом лопаток, и кожух статора, имеющий кольцевую стенку.
В частном случае двухконтурного и двухкорпусного турбореактивного двигателя приводную систему можно использовать для проворачивания ротора вентилятора (или “fan”), ротора компрессора низкого давления (или “booster”), ротора компрессора высокого давления, ротора турбины низкого давления и/или ротора турбины высокого давления турбореактивного двигателя. Как правило, эти различные роторы вращаются вокруг одной и той же оси, которую называют осью вращения или продольной осью турбореактивного двигателя. Кроме того, несколько роторов могут быть связаны между собой через трансмиссионные системы и приводятся во вращение одновременно. Обычно вращение ротора вентилятора, обеспечиваемое приводной системой, передается на ротор компрессора низкого давления, затем на ротор турбины низкого давления.
Как показано на фиг. 1, приводная система содержит держатель 100 общей удлиненной формы, электрический двигатель 110, корпус 111 которого закреплен на держателе 100, и колесо 120, связанное с валом двигателя 110.
Держатель 100 выполнен с возможностью установки на лопатке 200 приводимого во вращение ротора, как показано на фиг. 2. Первый конец 101а держателя 100 выполнен с возможностью удерживать переднюю кромку 201а (или входную кромку) лопатки 200, и второй коне 101b держателя 201b, расположенный противоположно к первому концу 101а, выполнен с возможностью удерживать заднюю кромку 201b (или выходную кромку) этой лопатки. Между первым и вторым концами 101а-101b держатель 100 имеет кривизну, по существу соответствующую аэродинамическому профилю лопатки 200.
В примере монтажа, представленном на фиг. 2, лопатка 200 принадлежит к ротору вентилятора двухконтурного турбореактивного двигателя. Лопатки ротора вентилятора окружены наружным кожухом 210 кольцевой формы. Наружный кожух 210 является неподвижной частью вентилятора, иначе говоря, деталью статора вентилятора. Держатель 100 установлен на вершине лопатки 200, то есть на дистальном конце лопатки относительно оси турбореактивного двигателя, таким образом, чтобы колесо 120 могло входить в контакт с внутренней поверхностью наружного кожуха 210. Следовательно, в этом примере длина держателя 100 по существу равна ширине лопатки 200 на уровне ее вершины. В данном случае «ширина» лопатка обозначает расстояние, которое отделяет ее переднюю кромку 201а от ее задней кромки 201b.
Для установки приводной системы на лопатке 200 ротора вентилятора отвечающий за контроль оператор располагается перед вентилятором. Поскольку доступ к задней кромке 201b лопатки затруднен в большей степени (так как она находится дальше от оператора), чем к ее передней кромке 201а, то предпочтительно в первую очередь на лопатке 200 располагают второй конец 101b держателя, который не имеет регулировочного механизма. Например, он выполнен согнутым в виде крючка, чтобы зацепляться за заднюю кромку 201b. С другой стороны, первый конец 101а держателя может быть оснащен регулировочным механизмом, чтобы прижимать держатель 100 к лопатке 200. Например, первый конец 101а содержит зажим, имеющий неподвижную губку 102 и подвижную губку 103, при этом положение подвижной губки 103 (по отношению к неподвижной губке 102) регулируют при помощи винта 104.
Для лучшей устойчивости держателя 100 на лопатке 200 промежуточный участок держателя может опираться на стенку, соединяющую переднюю и заднюю кромки 201а-102b лопатки 200.
Колесо 120 расположено таким образом, чтобы его поверхность 121 качения могла входить в контакт с кольцевой стенкой наружного кожуха 210, когда держатель 100 установлен на лопатке 200. Следовательно, наружный диаметр колеса 120 и его положение на держателе 100 обусловлены геометрией держателя (которая, в свою очередь, зависит от геометрии лопатки 200) и положением держателя на лопатке. Предпочтительно поверхность 121 качения колеса 120 имеет высокий коэффициент сцепления, способствующий качению без проскальзывания. Это позволяет значительно уменьшить потери мощности по причине проскальзывания поверхности 121 качения на кольцевой стенке наружного кожуха 210.
В колесо 120 можно встроить редуктор 122, чтобы увеличить крутящий момент, выдаваемый двигателем 110. Этот редуктор 122 содержит, например, шестерню, расположенную внутри колеса 120 и взаимодействующую с зубьями 123, выполненными на внутреннем контуре колеса 120. Входная ось редуктора 122, соответствующая оси двигателя, предпочтительно расположена параллельно его выходной оси, то есть оси колеса 120.
Предпочтительно двигатель 110 и колесо 120 находятся между двумя концами 101а-101b держателя 100 и предпочтительно на равном удалении от этих двух концов. Это расположение позволяет избегать контакта корпуса 111 двигателя с лопаткой 200. Кроме того, корпус 111 двигателя и колесо 120 предпочтительно расположены с двух сторон от имеющего форму параллелепипеда участка 105 держателя 100. Вал (не показан) двигателя 110 проходит при этом через держатель 100. В этой конфигурации показанная на фиг. 1 приводная система в целом является уравновешенной.
Предпочтительно электрический двигатель 110 является шаговым двигателем. Этот тип двигателя обеспечивает точное и тонкое вращение вала двигателя, например, с шагом 1,8° (200 шагов за один оборот вала двигателя). Выдаваемый шаговым двигателем крутящий момент является также более значительным в сравнении с другими двигателями такой же мощности (например, с щеточными двигателями постоянного тока), в частности, на низкой скорости. В отличие от этих других двигателей он имеет удерживающий момент, позволяющий блокировать вращение ротора турбореактивного двигателя (и удерживать его в заблокированном состоянии). Наконец, он позволяет точно определять угловое положение, в котором находится ось двигателя и, следовательно, лопатка 200 по отношению к наружному кожуху 210.
Показанная на фиг. 1 приводная система содержит также электронику 130 управления, например, в виде электронной платы (не показана), и по меньшей мере одну батарею 140. Электроника 130 управления управляет работой двигателя 110, тогда как батарея 140 питает двигатель 110 энергией и обеспечивает автономность приводной системы с точки зрения питания электричеством. Электроника 130 управления осуществляет следующие базовые функции: пуск и остановку двигателя, регулировку направления вращения и регулировку скорости вращения. Кроме того, она может осуществлять другие, так называемые умные функции, такие как экстренная остановка с разблокировкой удерживающего момента, выполнение полного оборота ротора (благодаря запоминанию первоначальной метки) и управление зарядкой батареи 140.
В этом первом варианте выполнения электроника 130 управления и батарея (или батареи) 140 неподвижно закреплены на держателе 100. Они могут находиться в одном корпусе, как показано на фиг. 1, или в разных корпусах. Корпус или корпусы закреплены на держателе 100.
Электроника 130 управления содержит, например, микроконтроллер, предпочтительно программируемый микроконтроллер, имеющий память, в которой записаны одна или несколько программ. Программа, исполняемая процессором микроконтроллера, может, в частности, различаться в зависимости от типа турбореактивного двигателя, от внутреннего диаметра кожуха статора, от числа ступеней компрессора и турбины низкого давления, а также от числа лопаток на каждой ступени компрессора и турбины. Предпочтительно микроконтроллер связан с областью записи, например, в виде платы памяти. Эта область записи содержит данные, необходимые для нормального исполнения программы, такие как передаточное число редуктора, число шагов на оборот двигателя 110, тип турбореактивного двигателя, внутренний диаметр кожуха статора, число ступеней компрессора и турбины низкого давления, а также число лопаток на каждой ступени компрессора и турбины.
Предпочтительно электроникой 130 управления и, следовательно, работой двигателя 110 можно управлять при помощи дистанционного пульта управления. Этот дистанционный пульт управления позволяет одному оператору управлять вращением ротора и одновременно осуществлять контроль деталей турбореактивного двигателя, например, при помощи эндоскопа. Например, пульт имеет кнопку пуск/остановка, потенциометр для регулировки скорости и/или направления вращения двигателя, кнопку запоминания положения ротора (метки) и кнопку «экстренная остановка».
Дистанционный пульт управления предпочтительно является беспроводным. Таким образом, его можно использовать при любом положении оператора вокруг турбореактивного двигателя. Электроника 130 и дистанционный пульт содержат при этом средства беспроводной связи, например, типа Bluetooth.
На фиг. 3 представлен второй вариант выполнения заявленной приводной системы, установленной в вентиляторе двухконтурного турбореактивного двигателя. Этот второй вариант выполнения отличается от первого варианта выполнения (фиг. 1-2) тем, что батареи 140 (в данном случае в количестве двух) вынесены на вторую лопатку 300, диаметрально противоположную относительно первой лопатки 200, на которой установлен держатель 100. Батареи 140 установлены на второй лопатке 300 при помощи держателя 150 батареи.
Иначе говоря, приводная система, показанная на фиг. 3, состоит из двух подузлов элементов:
- первый подузел установлен на первой лопатке 200 и включает в себя держатель 100, двигатель 110 и колесо 120:
- второй подузел установлен на второй лопатке 300 и включает в себя батареи 140 и держатель 150 батареи.
Оба подузла и, в частности, двигатель 110 и батареи 140 соединены электрически, например, при помощи электрических проводов, охваченных оболочкой 310.
Расположение батарей 140 противоположно к держателю 100 позволяет уравновесить вес первого подузла (держатель 100 - двигатель 110 - колесо 120) и легче преодолевать момент сил для прохождения некоторых угловых позиций ротора (как правило, на 3 часа и на 9 часов). Это позволяет использовать менее мощный (и, следовательно, меньший и более легкий) электрический двигатель 110, чем в первом варианте выполнения. Следовательно, в этом втором варианте выполнения система потребляет меньше электрической энергии (ток двигателя равен 0,5 А по сравнению с 2,8 А в первом варианте выполнения), что увеличивает срок службы батарей 140.
Чтобы максимизировать этот эффект противовеса, оба подузла предпочтительно имеют по существу одинаковые массы (±10%).
Учитывая, что вес электроники 130 управления является ничтожным по сравнению с другими элементами системы, она может принадлежать как к первому подузлу, так и к второму подузлу.
На фиг. 4 в увеличенном виде показаны батареи 140 и держатель 150, на котором они закреплены. Предпочтительно держатель 150 батареи сконструирован так же, как и держатель 100. Говоря другими словами, он имеет форму, адаптированную к аэродинамическому профилю второй лопатки 300, и содержит два конца 151а-151b, выполненные с возможностью удерживать переднюю и заднюю кромки 301а-301b второй лопатки 300. Оба конца 151а и 151b могут быть выполнены так же, как и концы держателя 100, то есть соответственно с зажимом и крючком.
Предпочтительно держатель 100, колесо 120 и держатель 150 батареи в основном выполнены из полимерного материала, такого как полимолочная кислота (ПЛА). Выбор такого материала позволяет значительно уменьшить вес заявленной приводной системы. Эта система весит около 3 кг (в отличие от 20 кг в случае известной приводной системы), из которых 1,5 кг приходятся только на батареи. Кроме того, полимерные материалы являются прочными в нормальных условиях эксплуатации и не могут повредить соседние детали турбореактивного двигателя, такие как лопатки вентилятора, кожух вентилятора или истираемый материал, покрывающий изнутри кожух вентилятора.
Учитывая свое крепление на лопаточном колесе ротора при помощи держателя 100 (и, в случае необходимости, держателя 150 батареи), заявленная приводная система является исключительно простой в использовании. Ее установка на роторе газотурбинного двигателя не требует никакого предварительного демонтажа, поскольку лопатки ротора являются доступными для оператора. По этим же причинам ее снятие с ротора является тоже быстрым и простым. Кроме того, она является легкой и компактной, что обеспечивает ее манипулирование одним человеком. Для ротора вентилятора ее максимальный размер (в данном случае длина) составляет, например, порядка 32 см. Например, колесо 120 имеет диаметр 9 см для наружного кожуха диаметром 195 см. Поверхность 121 качения имеет, например, ширину 3,5 см.
Благодаря компактности, небольшому весу и автономии заявленной приводной системы, ее можно использовать для операций технического обслуживания на стояночной площадке (без снятия силовой установки). Естественно, ее можно также использовать на заводе для приемочного контроля перед поставкой или для технического обслуживания.
Изобретение было описано выше в примере применения для вентилятора двухконтурного турбореактивного двигателя, содержащего наружный кожух 210 (то есть кожух, ограничивающий наружное пространство аэродинамического проточного тракта). Как было указано выше, приводная система, показанная на фиг. 1-4, является совместимой с другими типами ротора и/или с другими типами газотурбинного двигателя. В некоторых вариантах применения (например, для турбореактивного двигателя типа “Open Rotor”, колесо 120 может входить в контакт с внутренним (кольцевым) кожухом (то есть, с кожухом, ограничивающим внутреннее пространство аэродинамического проточного тракта), а не с наружным кожухом. Держатель 100 и, в случае необходимости, держатель 150 батареи будут в этом случае установлены на уровне ножки лопатки (проксимального конца относительно оси газотурбинного двигателя).
Наконец, специалист в данной области может предусмотреть самые разные версии и модификации заявленной приводной системы. Например, конфигурация первого и второго концов держателя 100 (и держателя 150 батареи) может быть изменена на противоположную, если необходимо получить доступ к кольцевом ряду лопаток ротора со стороны выхода, а не со стороны входа, как правило, для роторов, отличных от ротора вентилятора. В этом случае второй конец 101b держателя будет оснащен зажимным механизмом и будет удерживать заднюю кромку лопатки в последнюю очередь.

Объектом изобретения является система для приведения во вращение ротора газотурбинного двигателя относительно кожуха статора, при этом ротор содержит кольцевой ряд лопаток. Эта приводная система содержит: держатель (100), первый конец (101а) которого выполнен с возможностью удержания передней кромки первой лопатки кольцевого ряда и второй конец (101b) которого выполнен с возможностью удержания задней кромки первой лопатки; электрический двигатель (110), содержащий вал и корпус (111), закрепленный на держателе (100); и колесо (120), связанное с валом двигателя (110) и имеющее поверхность (121) качения, при этом колесо расположено таким образом, чтобы поверхность (121) качения могла входить в контакт с кольцевой стенкой кожуха статора, когда держатель (100) установлен на первой лопатке. Предложенная система является компактной и выполнена с возможностью легкой и быстрой установки на газотурбинном двигателе, чтобы ею мог безопасно манипулировать один человек. 2 н. и 9 з.п. ф-лы, 4 ил.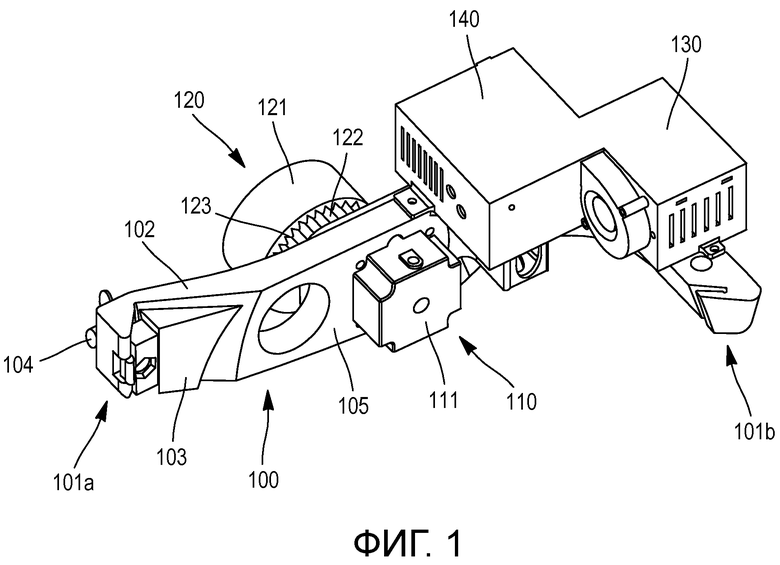
1. Система для приведения во вращение ротора газотурбинного двигателя относительно кожуха статора (210), при этом ротор содержит кольцевой ряд лопаток (200,300), при этом приводная система отличается тем, что содержит:
- держатель (100), первый конец (101а) которого выполнен с возможностью удержания передней кромки (201а) первой лопатки (200) кольцевого ряда и второй конец (101b) которого выполнен с возможностью удержания задней кромки (201b) первой лопатки;
- электрический двигатель (110), содержащий вал и корпус (111), закрепленный на держателе (100); и
- колесо (120), связанное с валом двигателя (110) и имеющее поверхность (121) качения, при этом колесо расположено таким образом, чтобы поверхность (121) качения могла входить в контакт с кольцевой стенкой кожуха статора (210), когда держатель (100) установлен на первой лопатке (200).
2. Система по п. 1, в которой двигатель (110) и колесо (120) расположены между первым и вторым концами (101а-101b) держателя (100).
3. Система по одному из пп. 1 и 2, содержащая по меньшей мере одну батарею (140), закрепленную на держателе (100) и электрически соединенную с двигателем (110).
4. Система по одному из пп. 1 и 2, дополнительно содержащая:
- держатель (150) батареи, выполненный с возможностью установки на второй лопатке (300) кольцевого ряда, диаметрально противоположной относительно первой лопатки (200); и
- по меньшей мере одну батарею (140), закрепленную на держателе (150) батареи и электрически соединенную с электрическим двигателем (110).
5. Система по п. 4, в которой держатель (150) батареи содержит первый конец (151а), выполненный с возможностью удержания передней кромки (301а) второй лопатки (300), и второй конец (151b), выполненный с возможностью удержания задней кромки (301b) второй лопатки (300).
6. Система по одному из пп. 4 и 5, в которой:
- держатель (100), электрический двигатель (110) и колесо (120) принадлежат первому подузлу элементов, предназначенному для установки на первой лопатке (200);
- держатель (150) батареи и упомянутая по меньшей мере одна батарея (140) принадлежат второму подузлу элементов, предназначенному для установки на второй лопатке (300); и
- первый и второй подузлы элементов имеют по существу одинаковую массу.
7. Система по любому из пп. 1-6, в которой первый конец (101а) держателя (100) содержит зажим и второй конец (101b) держателя (100) выполнен в виде крючка.
8. Система по любому из пп. 1-7, в которой электрический двигатель (110) является шаговым двигателем.
9. Система по любому из пп. 1-8, в которой колесо (120) оснащено редуктором (122-123) скорости.
10. Система по любому из пп. 1-9, в которой держатель (100) выполнен из полимерного материала, такого как полимолочная кислота (ПЛА).
11. Ротор газотурбинного двигателя, более точно ротор вентилятора двухконтурного турбореактивного двигателя, оснащенный системой по любому из пп. 1-10.
| СПОСОБ ПРОИЗВОДСТВА ЭНДОДОНТИЧЕСКИХ ИНСТРУМЕНТОВ (ВАРИАНТЫ) | 2006 |
|
RU2394523C2 |
| Щипцы для удаления искусственных зубных коронок | 1934 |
|
SU42670A1 |
| САХАРОСОДЕРЖАЩИЙ ПРОДУКТ | 1997 |
|
RU2114916C1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ВРАЩЕНИЯ ТУРБИННОГО ВАЛОПРОВОДА И ТУРБОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2556730C2 |
| SU 754925 A1, 23.01.1984. | |||

