Изобретение относится к электромеханике и может быть использовано в ударных приводах машин и механизмов, которые предназначены для создания циклических ударных импульсов, например, при деформации объектов в технологическом процессе.
Известен преобразователь электрических импульсов в механические, содержащий размещенные в корпусе плоский индуктор и выводы для соединения с источником электрических импульсов, а также расположенный со стороны рабочей поверхности индуктора якорь (силопередающий элемент) из электропроводного материала, который выполнен составным из плоских элементов и заключен в гибкую оболочку [1]. При этом плоские элементы якоря могут быть выполнены в виде концентрических колец, параллельных или радиально расположенных полос.
Однако такая конструкция обладает низкой эффективностью за счет выполнения якоря не сплошным, а составным с неэлектропроводящими зазорами между плоскими электропроводящими элементами. Вследствие этого вихревые токи, индуцированные в якоре, имеют уменьшенную амплитуду, а значит и электродинамическая сила между индуктором и якорем недостаточно велика. Кроме того, составная конструкция обуславливает низкую надежность якоря, а значит и всего преобразователя.
Известно ударное электромеханическое устройство, содержащее плоскую обмотку возбуждения, размещенную в диэлектрическом корпусе, на котором установлены регулируемые упоры, обеспечивающие зазор между корпусом и стенкой объекта воздействия [2]. Ударник этого устройства выполнен в виде метаемой шайбы из электропроводящего материала, установлен над обмоткой возбуждения и связан с возвратно-фиксирующим механизмом. К ударнику прикреплена накладка с ребрами, причем форма накладки определяется формой обрабатываемой поверхности и ее жесткостью.
Однако эффективность известного электромеханического устройства недостаточно высока из-за того, что выполненный в виде шайбы ударник и плоская обмотка возбуждения характеризуются относительно небольшим значением взаимной индуктивности. Вследствие этого в ударнике индуцируются вихревые токи небольшой величины, а значит и развивается незначительная электродинамическая сила между обмоткой возбуждения и ударником.
Известна магнитно-импульсная установка для разрушения сводов и очистки технологического оборудования от налипших материалов, содержащая индуктор, выполненный в виде плоской обмотки возбуждения с диэлектрическим корпусом, подключаемой к источнику импульсного тока, и расположенный между индуктором и очищаемой поверхностью оборудования якорь, выполненный из материала с высокой электропроводностью и коаксиально установленный с обмоткой индуктора [3]. Якорь этой установки выполнен в форме плоского диска, торцевая поверхность которого прилегает к торцевой поверхности обмотки индуктора, с внутренней обечайкой, расположенной внутри обмотки индуктора так, что наружная боковая поверхность обечайки контактирует с частью внутренней боковой поверхности обмотки возбуждения.
В этом устройстве за счет наличия внутренней обечайки в дисковом якоре обеспечивается улучшенная магнитная связь между якорем и обмоткой индуктора, вследствие чего усиливается электродинамическое взаимодействие между ними, а значит и силовое воздействие на очищаемую поверхность оборудования.
Однако эффективность работы описанного электромеханического устройства недостаточно высока. Это связано с тем, что коэффициент магнитной связи между обмоткой индуктора и якорем небольшой, а значит имеет место недостаточное силовое воздействие на якорь со стороны обмотки индуктоpa. Кроме того, в этом устройстве проблематично формирование значительной амплитуды электродинамической силы без увеличения параметров источника импульсного тока. Поскольку обмотка индуктора охвачена диэлектрическим корпусом, то эффективность ее охлаждения низка. Из-за повышенной температуры обмотки растет ее сопротивление, ухудшается состояние электрической изоляции, что обуславливает снижение величины силового ударного импульса или частоты следования токовых импульсов, а значит и производительности установки.
Наиболее близким по технической сущности и заявляемому результату является линейный электромеханический преобразователь ударного действия, содержащий коаксиально расположенные ферромагнитный корпус, индуктор, подвижные якорь и боек [4]. Внутри ферромагнитного корпуса, выполненного в виде стакана с боковыми стенками и центральным стержнем, закрытого крышкой, расположены индуктор и электропроводящий диск якоря. Индуктор выполнен в виде соленоидальной катушки с центральным отверстием. Якорь выполнен в виде электропроводящего диска с центральным отверстием, плоская поверхность которого прилегает к индуктору, и коаксиально расположенного ударного диска, взаимодействующего с бойком, заостренный конец которого направлен в сторону объекта деформирования. Между крышкой ферромагнитного корпуса с аксиальным направляющим отверстием и электропроводящим диском якоря установлена возвратная пружина.
В устройстве-прототипе ферромагнитный корпус обеспечивает ослабление внешних магнитных полей рассеяния и усиление полей в активной зоне между индуктором и электропроводящим диском якоря, создавая высокую механическую надежность преобразователя. Известный преобразователь обладает высокой технологичностью за счет простых конфигураций основных конструктивных элементов и характеризуется легкостью их сборки и настройки.
При этом можно отметить следующие недостатки устройства-прототипа.
Аксиально вытянутая соленоидная конфигурация индуктора и конфигурация ферромагнитного корпуса формируют малую площадь поверхности электропроводящего диска якоря, прилегающей к индуктору, что уменьшает электродинамическую силу взаимодействия между ними. При этом существенно возрастают аксиальные габариты устройства.
Кроме того, после токового импульса в индукторе начинается перемещение якоря, что обуславливает ослабление магнитной связи между ними. В результате уменьшаются индуцированные токи в электропроводящем диске якоря, а значит и электродинамическая сила отталкивания. Все это снижает эффективность электромеханического преобразователя ударного действия.
Задачей изобретения является повышение эффективности линейного электромеханического преобразователя ударного действия.
Поставленная задача решается за счет того, что в известном линейном электромеханическом преобразователе ударного действия, содержащем коаксиально расположенные ферромагнитный корпус, индуктор, подвижные якорь и боек, внутри ферромагнитного корпуса, выполненного с боковым цилиндрическим и торцевыми дисковыми участками, расположены индуктор и электропроводящий диск якоря, индуктор выполнен в виде катушки с центральным отверстием, якорь выполнен в виде электропроводящего диска с центральным отверстием, плоская поверхность которого прилегает к индуктору, и коаксиально расположенного ударного диска, взаимодействующего с бойком, заостренный конец которого направлен в сторону объекта деформирования, между торцевым дисковым участком ферромагнитного корпуса с аксиальным направляющим отверстием и электропроводящим диском якоря установлена возвратная пружина, в соответствии с предлагаемым изобретением, индуктор прикреплен к боковому цилиндрическому участку ферромагнитного корпуса так, что между его плоской поверхностью и торцевым дисковым участком ферромагнитного корпуса, удаленным от объекта деформирования, выполнен зазор, в котором коаксиально расположен аксиально подвижный ферромагнитный сердечник в форме диска с центральным выступом, который выполнен с возможностью перемещения внутри центрального отверстия индуктора, одна из торцевых сторон диска сердечника выполнена с возможностью прилегания к плоской стороне индуктора, а вторая сторона выполнена с возможностью прилегания к дисковому участку ферромагнитного корпуса, электропроводящий и ударный диски якоря соединены между собой, причем между центральным выступом ударного диска, расположенном в центральных отверстиях электропроводящего диска якоря и индуктора, и центральным выступом подвижного ферромагнитного сердечника установлена силовая аксиально сжимаемая пружина, ударный диск якоря, взаимодействующий с по крайней мере тремя фиксаторами, упорядоченно в тангенциальном направлении закрепленными на боковом цилиндрическом участке ферромагнитного корпуса, соединен с бойком, выполненным с возможностью перемещения через центральное направляющее отверстие торцевого дискового участка ферромагнитного корпуса.
Кроме того, фиксатор содержит упругий элемент с возможностью сжатия в направлении бокового цилиндрического участка ферромагнитного корпуса, при котором обеспечивается аксиальное перемещение якоря.
Кроме того, взаимодействующий с якорем элемент фиксатора содержит закругленный участок.
Кроме того, фиксатор выполнен в виде упругой изогнутой скобы, концевые участки которой расположены с возможностью перемещения в пазах бокового цилиндрического участка ферромагнитного корпуса, а максимально выступающий участок выполнен со смещением в направлении индуктора относительно концевых участков.
Кроме того, в центральном отверстии подвижного ферромагнитного сердечника размещен центральный направляющий штырь, прикрепленный к торцевому дисковому участку ферромагнитного корпуса, удаленному от объекта деформирования.
Кроме того, поверхность электропроводящего диска якоря, взаимодействующая с фиксатором, выполнена со скосом.
Кроме того, к ферромагнитному сердечнику присоединены аксиально направленные и упорядоченно расположенные в тангенциальном направлении по крайней мере три направляющих стержня, проходящих через направляющие отверстия в изоляционном цилиндре, крепящем индуктор к боковому цилиндрическому участку ферромагнитного корпуса.
Кроме того, направляющий стержень, присоединенный к ферромагнитному сердечнику, выполнен с возможностью взаимодействия с фиксатором, обеспечивая перемещение подвижного элемента фиксатора в направлении бокового цилиндрического участка ферромагнитного корпуса.
Кроме того, подвижный элемент фиксатора содержит наклонные участки, которые при взаимодействии с направляющим стержнем и электропроводящим диском якоря обеспечивают его перемещение в направлении бокового цилиндрического участка ферромагнитного корпуса.
Кроме того, направляющий стержень, присоединенный к ферромагнитному сердечнику, выполнен с возможностью взаимодействия с подвижным элементом фиксатора, выполненным в виде подпружиненного постоянного магнита, длинная боковая сторона которого установлена напротив боковой стороны ферромагнитного ударного диска якоря.
Кроме того, подпружиненный постоянный магнит фиксатора выполнен с возможностью поворота относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса.
Кроме того, подпружиненный постоянный магнит фиксатора выполнен с возможностью наклона относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса.
Кроме того, силовая аксиально сжимаемая пружина выполнена из ферромагнитного материала.
Кроме того, боковая цилиндрическая и торцевые дисковые участки ферромагнитного корпуса выполнены с возможностью разъединения.
Наличие зазора между плоской поверхностью индуктора и торцевым дисковым участком ферромагнитного корпуса, удаленным от объекта деформирования, формирует пространство, в котором размещается подвижный ферромагнитный сердечник. Данный сердечник вначале притягивается к индуктору при его возбуждении от импульсного источника, сжимая силовую пружину. При этом якорь удерживается фиксаторами до момента, при котором либо электродинамическая сила превысит определенную величину, либо сердечник приблизится к индуктору на определенное расстояние, например до контакта. После чего фиксаторы отпускают якорь, который под действием электродинамических сил со стороны индуктора и со стороны сжатой силовой пружины отталкивается в направлении объекта деформирования.
В данном процессе ферромагнитный сердечник при приближении к индуктору усиливает магнитное поле в зоне якоря и сжимает силовую пружину, накапливая механическую энергию.
Удержание фиксаторами якоря на начальном этапе позволяет увеличить силовое электродинамическое воздействие на электропроводящий диск якоря и максимально сжать силовую пружину, накопив максимальную энергию сжатия.
При этом торцевой дисковый участок ферромагнитного корпуса может быть выполнен тонкостенным, поскольку подвижный ферромагнитный сердечник обеспечивает экранирование магнитных полей рассеивания и является элементом магнитопровода совместно с остальными участками ферромагнитного корпуса.
Закрепление индуктора к боковому цилиндрическому участку ферромагнитного корпуса позволяет к обеим его плоским поверхностям плотно прижимать, к одной стороне - ферромагнитный сердечник, а к другой стороне - электропроводящий диск якоря. Ферромагнитный сердечник развивает электромагнитную силу притяжения, а электропроводящий диск якоря - электродинамическую силу отталкивания, которые направлены в сторону объекта деформирования.
Наличие центрального выступа в диске ферромагнитного сердечника, который заходит в центральное отверстие индуктора, позволяет увеличить электромагнитную силу притяжения сердечника к индуктору, обеспечить надежное сжатие силовой пружины и центрировать сердечник относительно индуктора.
Соединение электропроводящего и ударного дисков якоря и бойка между собой делает конструкцию механически более надежной и прочной, что важно, учитывая малую механическую прочность электропроводящего, например медного, диска.
Наличие центрального выступа в ударном диске якоря, который заходит в центральное отверстие индуктора, позволяет увеличить прочность якоря, обеспечить надежное сжатие силовой пружины и центрировать якорь относительно индуктора.
Наличие по крайней мере трех фиксаторов, упорядоченно в тангенциальном направлении закрепленных на боковом цилиндрическом участке ферромагнитного корпуса, позволяет надежно удерживать якорь на первом этапе работы после возбуждения индуктора без аксиальных перекосов.
Выполнение бойка с возможностью перемещения через центральное направляющее отверстие торцевого дискового участка ферромагнитного корпуса обеспечивает строго аксиальное перемещение бойка.
Наличие в фиксаторе упругого элемента, который выполнен с возможностью сжатия в направлении бокового цилиндрического участка ферромагнитного корпуса, позволяет как удерживать якорь на начальном этапе работы, так и отпускать его на втором этапе для аксиального перемещения.
Наличие у элемента фиксатора, который взаимодействует с якорем, закругленного участка обеспечивает взаимное перемещение якоря относительно фиксатора при определенной величине аксиальной силы.
Выполнение фиксатора в виде упругой изогнутой скобы обуславливает его максимальную простоту и надежность. Если концевые участки скобы расположены в пазах бокового цилиндрического участка ферромагнитного корпуса с возможностью перемещения, то высоту скобы можно уменьшать путем давления со стороны якоря. Так как максимально выступающий участок скобы выполнен со смещением в направлении индуктора относительно концевых участков, то для ее радиального сжатия якорем при направлении в сторону объекта деформирования требуется бόльшая сила, чем при движении якоря в противоположном направлении.
Центральный направляющий штырь, прикрепленный к торцевому дисковому участку ферромагнитного корпуса, удаленному от объекта деформирования, обеспечивает аксиальное перемещение ферромагнитного сердечника при помощи его центрального отверстия.
Выполнение поверхности электропроводящего диска якоря, взаимодействующей с фиксатором, со скосом обеспечивает перемещение якоря от объекта деформирования при малой жесткости возвратной пружины.
Аксиально направленные направляющие стержни, присоединенные к ферромагнитному сердечнику и проходящие через направляющие отверстия в изоляционном цилиндре, который крепит индуктор к боковому цилиндрическому участку ферромагнитного корпуса, обеспечивают аксиальное без перекосов перемещение ферромагнитного сердечника. Для обеспечения такого перемещения необходимо иметь минимум три направляющих стержня, которые упорядоченно, например равномерно, расположены в тангенциальном направлении.
Поскольку эти направляющие стержни выполнены с возможностью взаимодействия с фиксатором, то они обеспечивают отпускание якоря при определенном положении ферромагнитного сердечника относительно индуктора. Наличие наклонных участков у подвижного элемента фиксатора обеспечивает его перемещение в направлении бокового цилиндрического участка ферромагнитного корпуса при воздействии на один из участков направляющего стержня (при рабочем ходе якоря), а на другой участок - якоря (при возвратном ходе).
Если подвижный элемент фиксатора выполнен в виде подпружиненного постоянного магнита, длинная боковая сторона которого установлена напротив боковой стороны ферромагнитного ударного диска якоря, то при воздействии на него направляющего стержня и его перемещении электромагнитная сила притяжения уменьшается и якорь начинает движение. При этом постоянный магнит может либо поворачиваться, либо наклоняться относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса
Выполнение силовой пружины из ферромагнитного материала усиливает как электромагнитную силу притяжения ферромагнитного сердечника к индуктору, так и электродинамическую силу отталкивания якоря, поскольку пружина выполняет функцию магнитопровода, усиливая магнитные поля.
Выполнение боковой цилиндрической и двух торцевых дисковых участков ферромагнитного корпуса с возможностью разъединения позволяет сделать конструкцию технологичной, легкой при монтаже и ремонте.
На фиг.1 представлено поперечное сечение линейного электромеханического преобразователя ударного действия с центральным направляющим штырем в исходном положении;
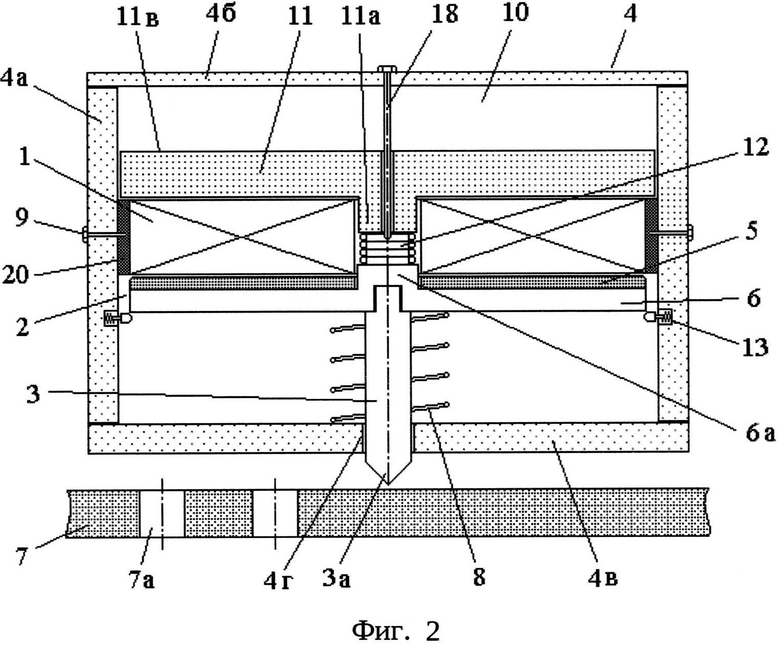
на фиг.2 - преобразователь на фиг.1 на начальном этапе работы при перемещении ферромагнитного сердечника к индуктору и удержании якоря фиксаторами;
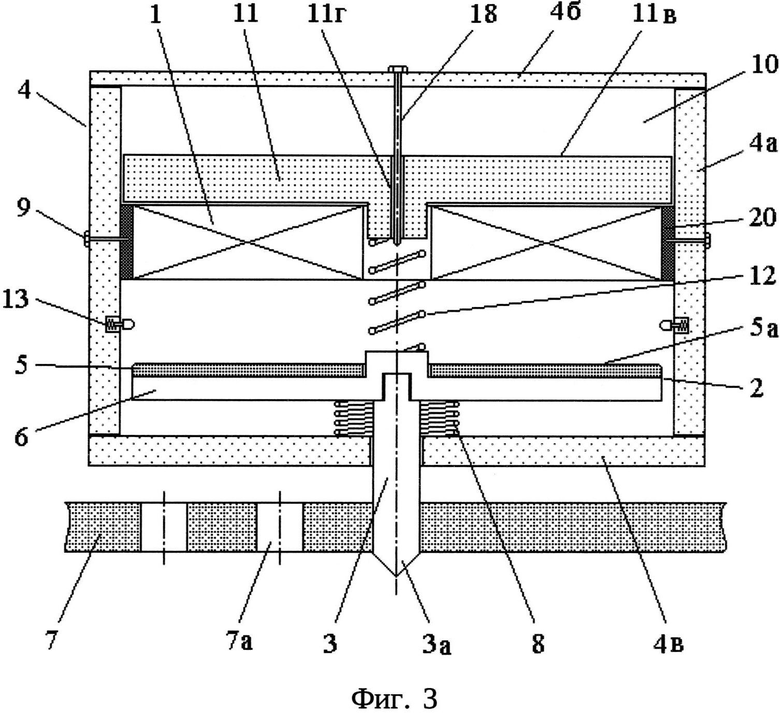
на фиг.3 - преобразователь на фиг.1 на втором этапе работы при перемещении якоря в направлении объекта деформирования;
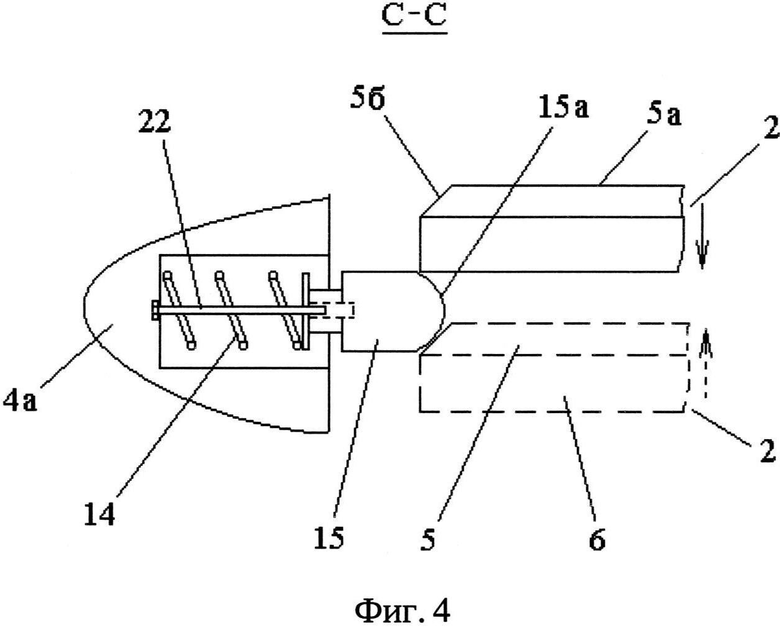
на фиг.4 - вид С на фиг.1. Сплошными линиями показан якорь, удерживаемый фиксатором. Штриховыми линиями показан якорь при возвратном движении в направлении индуктора. Стрелками показаны направления перемещения якоря при рабочем (сплошные линии) и возвратном (штриховые линии) ходе якоря;
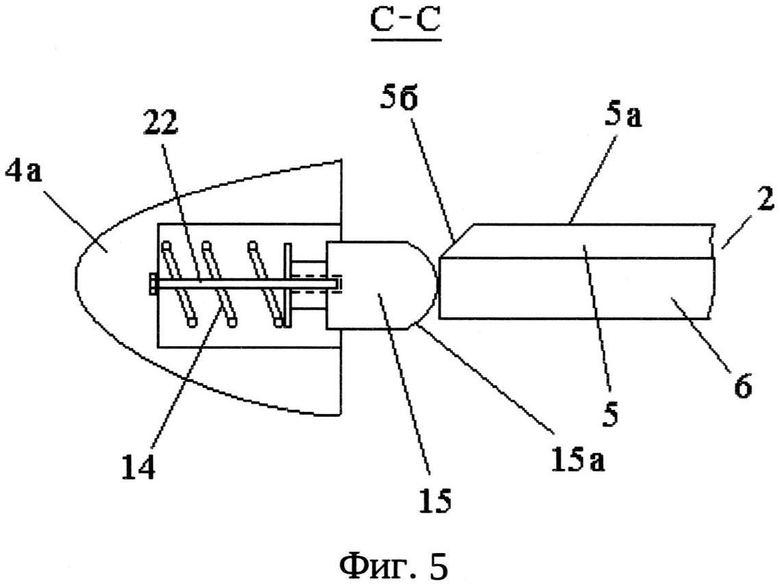
на фиг.5 - вид на фиг.4 при прохождении якоря через фиксатор;
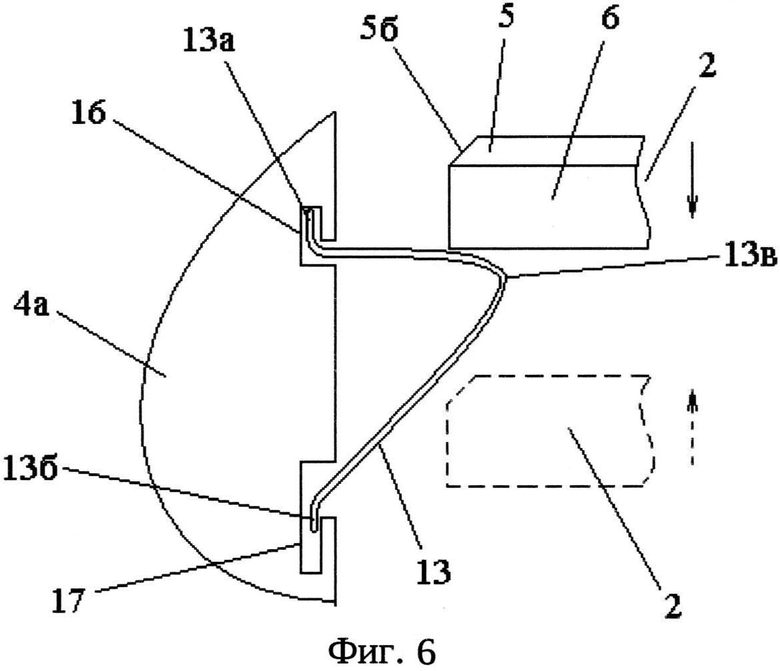
на фиг.6 - фиксатор, выполненный в виде упругой изогнутой скобы. Сплошными линиями показан якорь, удерживаемый фиксатором. Штриховыми линиями показан якорь при возвратном движении в направлении индуктора. Стрелками показаны направления перемещения якоря при рабочем (сплошные линии) и возвратном (штриховые линии) перемещении якоря;
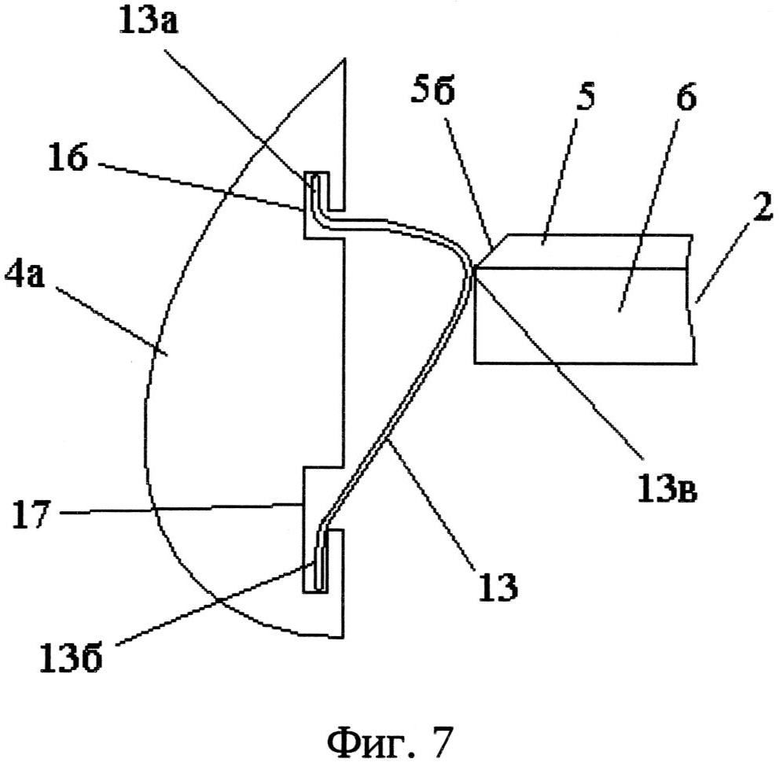
на фиг.7 - вид на фиг.6 при прохождении якоря через фиксатор;
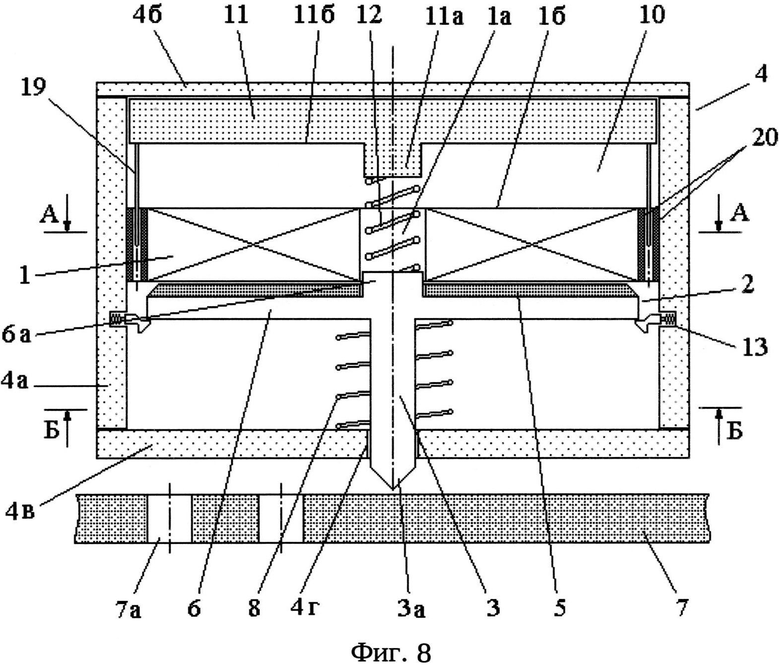
на фиг.8 - поперечное сечение линейного электромеханического преобразователя ударного действия, у которого к ферромагнитному сердечнику присоединены направляющие стержни, в исходном положении;
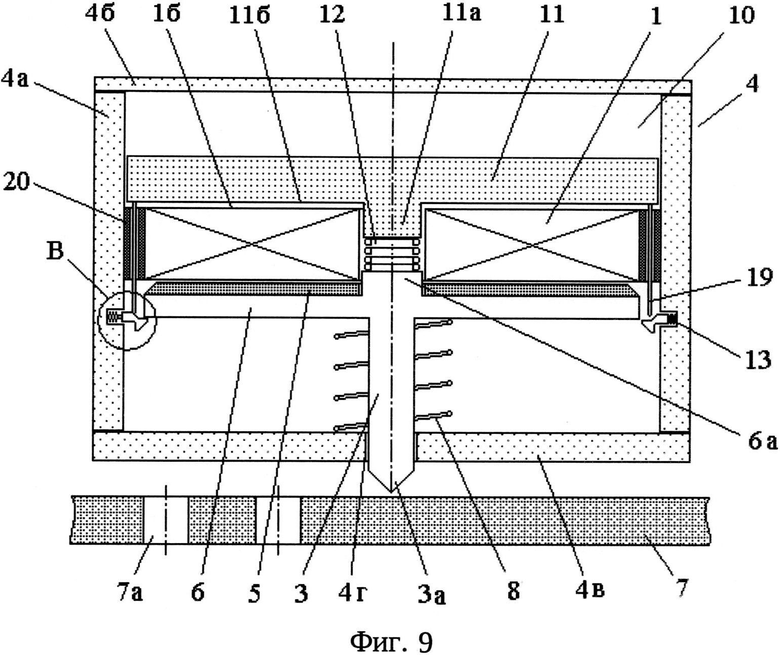
на фиг.9 - преобразователь на фиг.8 на начальном этапе работы при перемещении ферромагнитного сердечника к индуктору и удержании якоря фиксаторами;
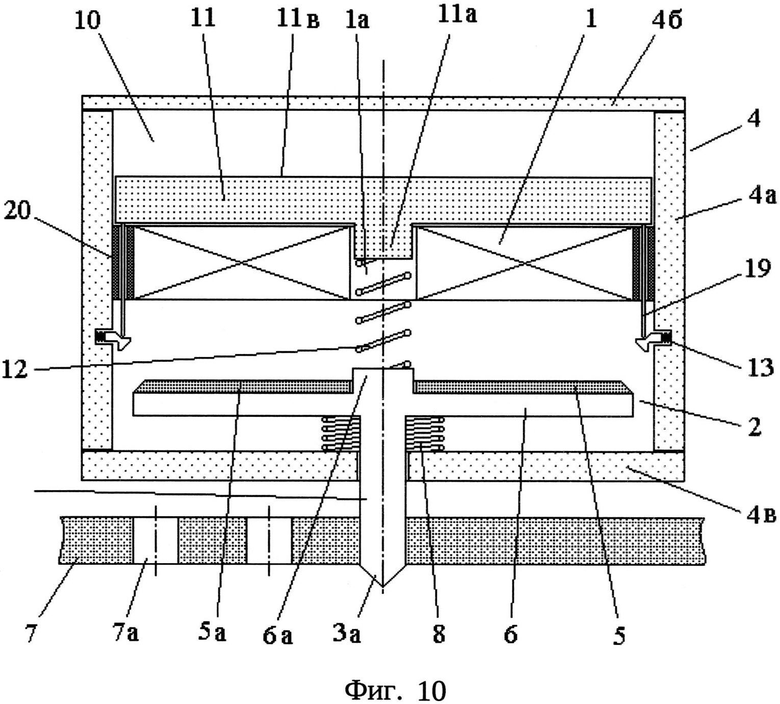
на фиг.10 - преобразователь на фиг.8 на втором этапе работы при перемещении якоря в направлении объекта деформирования;
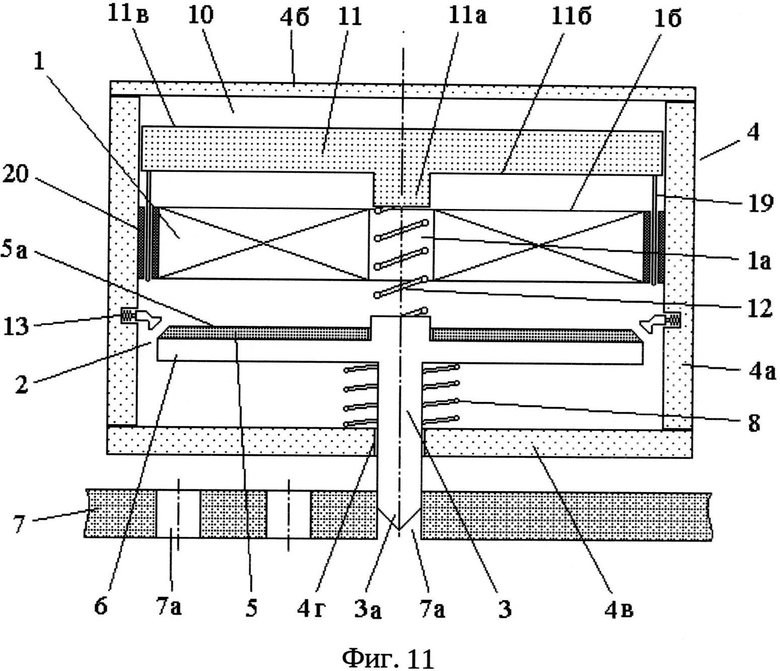
на фиг.11 - преобразователь на фиг.8, у которого якорь под действием возвратной пружины перемещается от объекта деформирования в направлении индуктора;
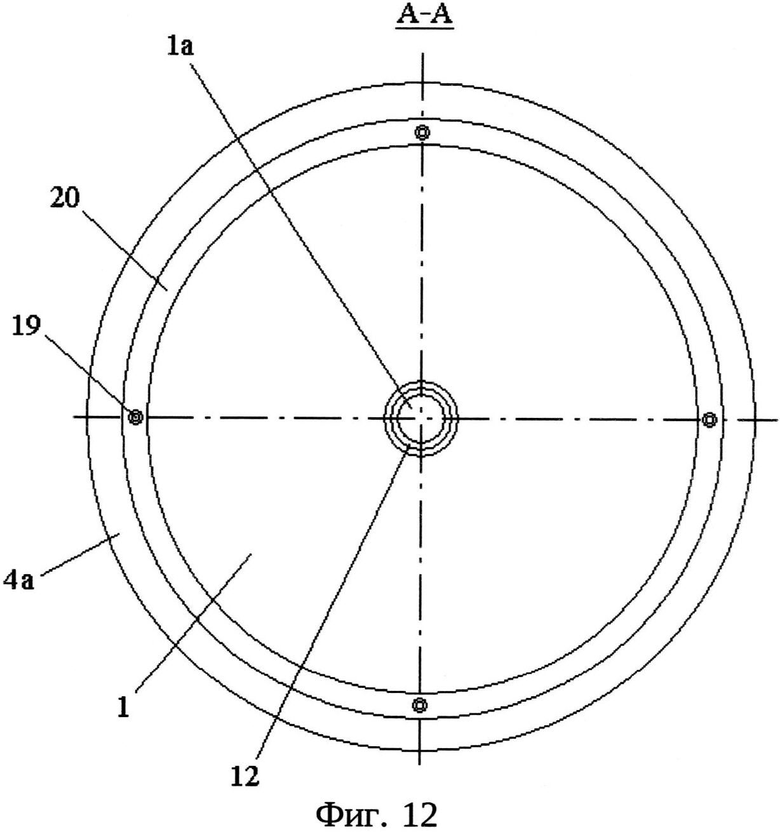
на фиг.12 - вид А-А на фиг.8;
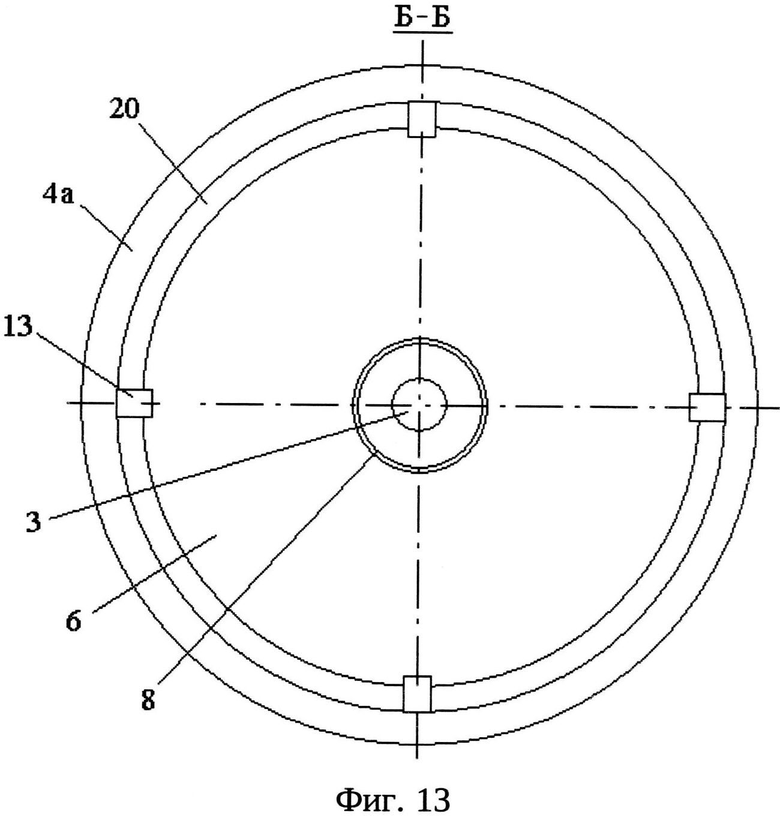
на фиг.13 - вид Б-Б на фиг.8;
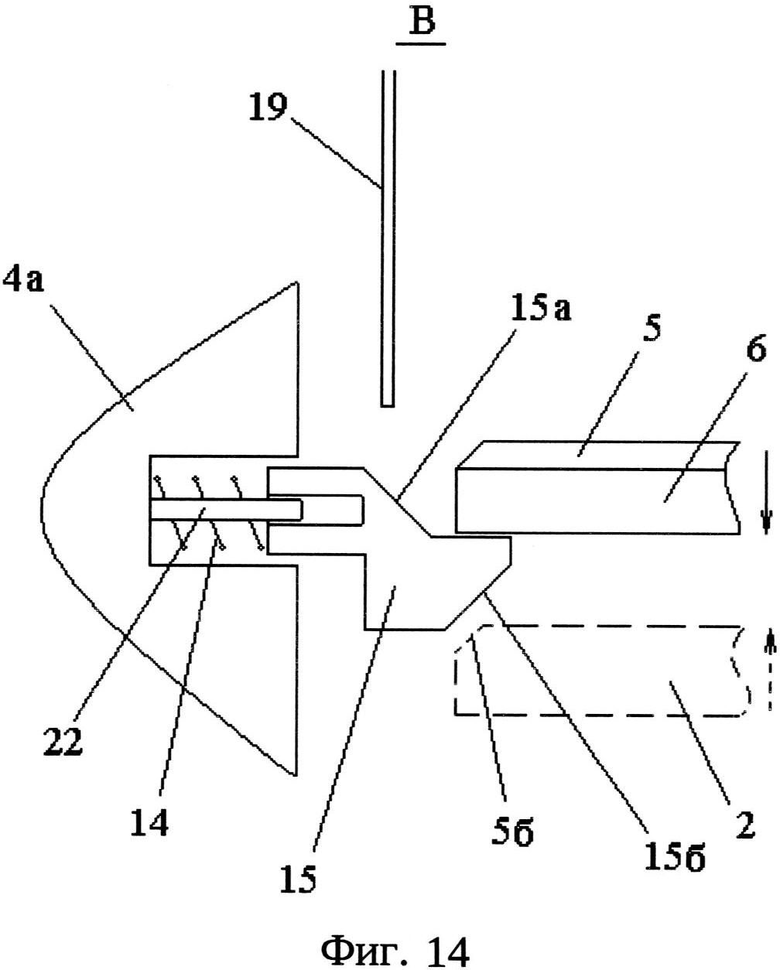
на фиг.14 - вид В на фиг.9. Сплошными линиями показан якорь, удерживаемый фиксатором до взаимодействия с направляющим стержнем. Штриховыми линиями показан якорь при возвратном движении в направлении индуктора. Стрелками показаны направления перемещения якоря при рабочем (сплошные линии) и возвратном (штриховые линии) перемещении якоря;
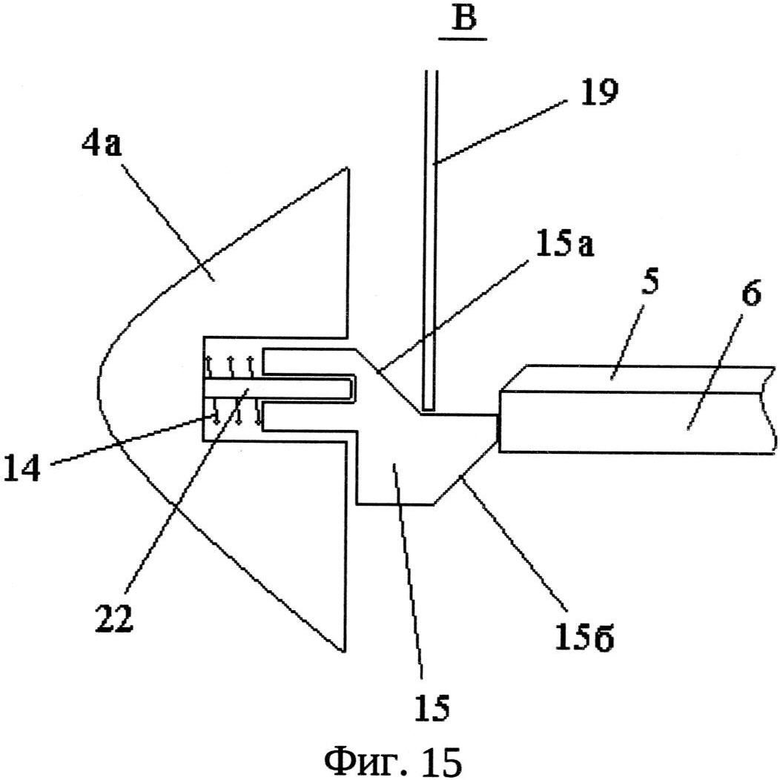
на фиг.15 - вид на фиг.14 при прохождении якоря через фиксатор;
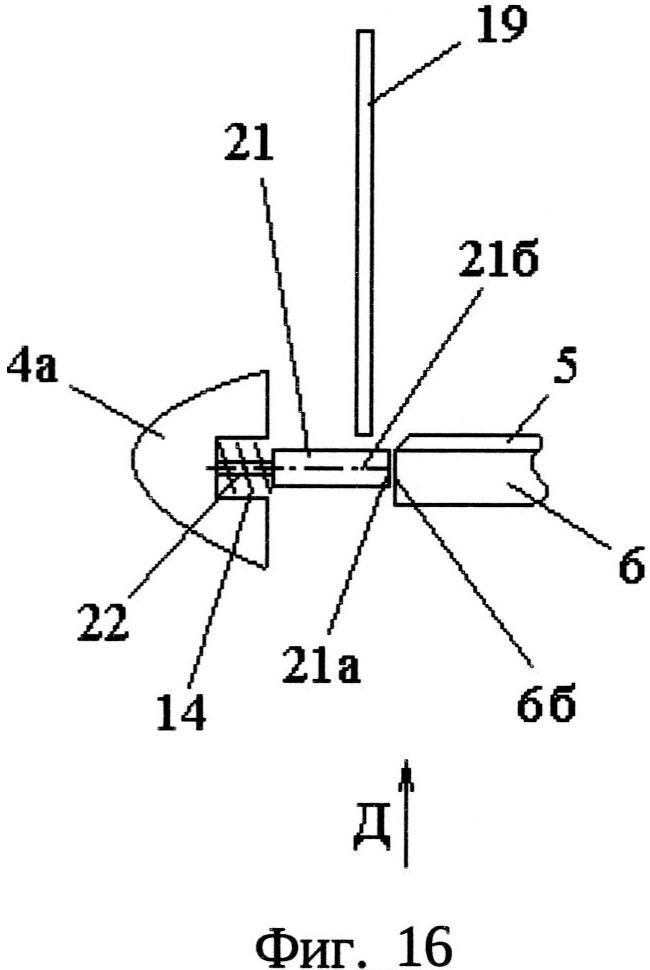
на фиг.16 - фиксатор, у которого подвижный элемент выполнен в виде подпружиненного постоянного магнита, длинная боковая сторона которого установлена напротив боковой стороны ферромагнитного ударного диска якоря, до взаимодействия с направляющим стержнем;
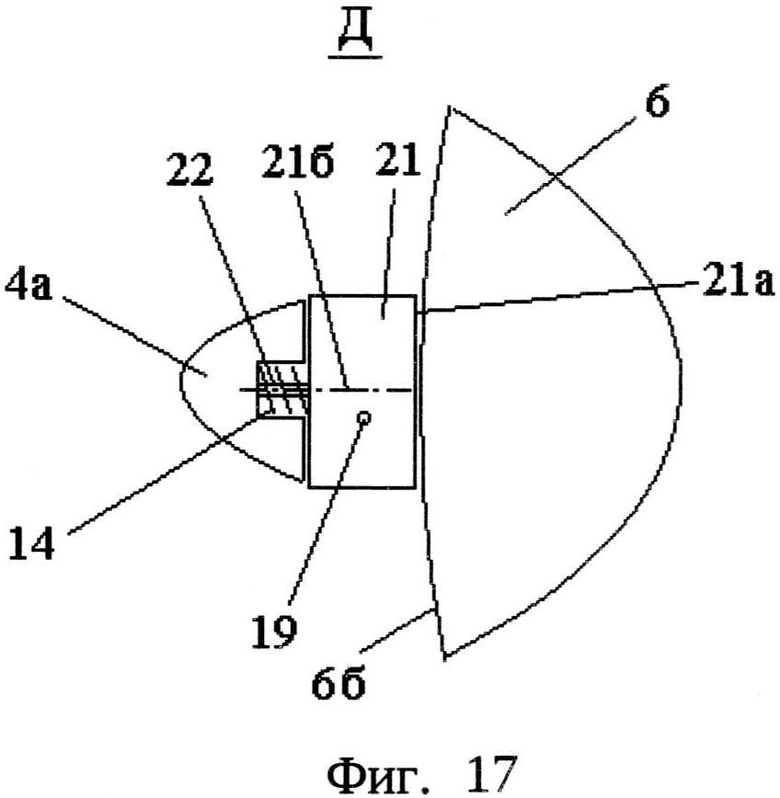
на фиг.17 - вид Д на фиг.16;
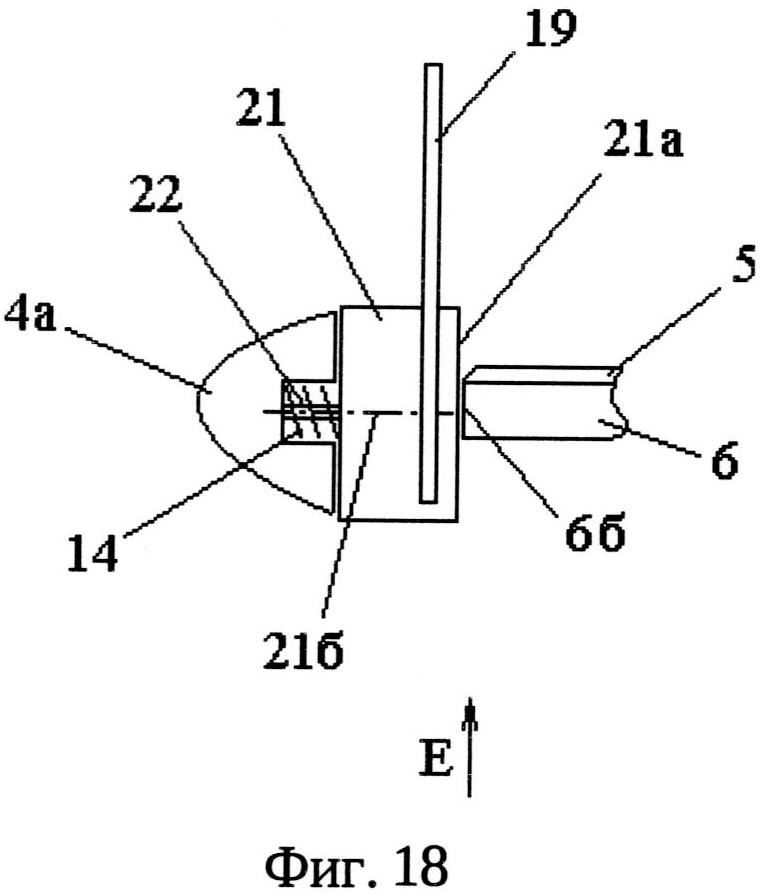
на фиг.18 - вид на фиг.16 после взаимодействия подвижного элемента фиксатора с направляющим стержнем и поворота относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса;
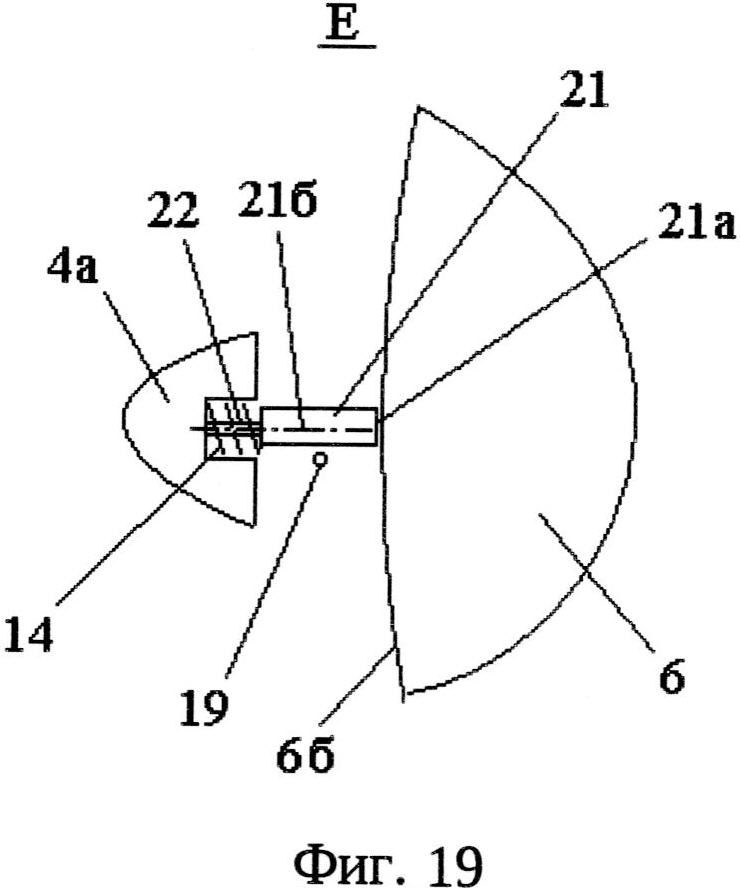
на фиг.19 - вид Е на фиг.18;
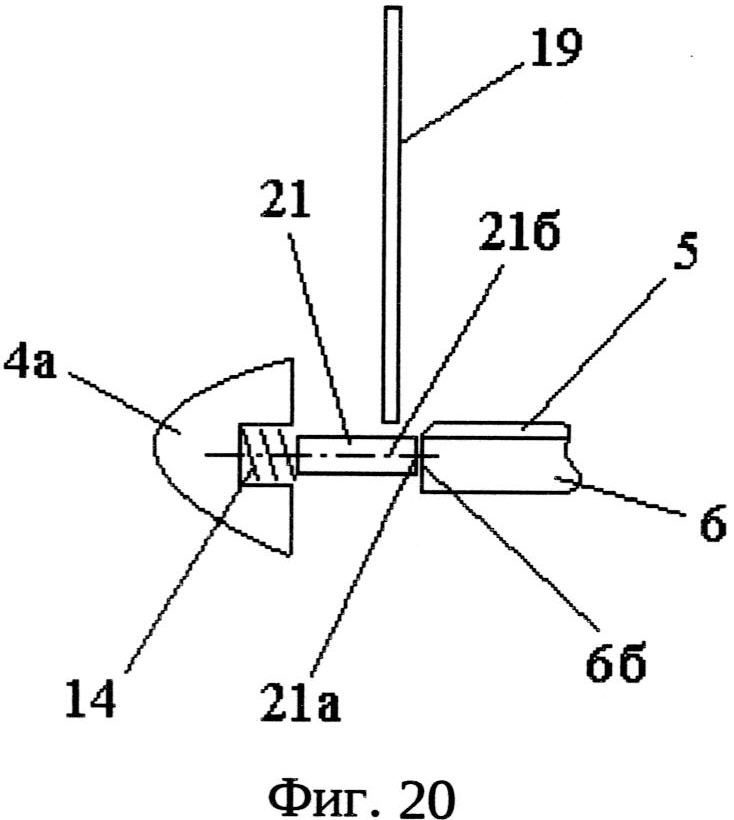
на фиг.20 - вид на фиг.16, у которого подпружиненный постоянный магнит фиксатора выполнен с возможностью наклона до взаимодействия с направляющим стержнем;
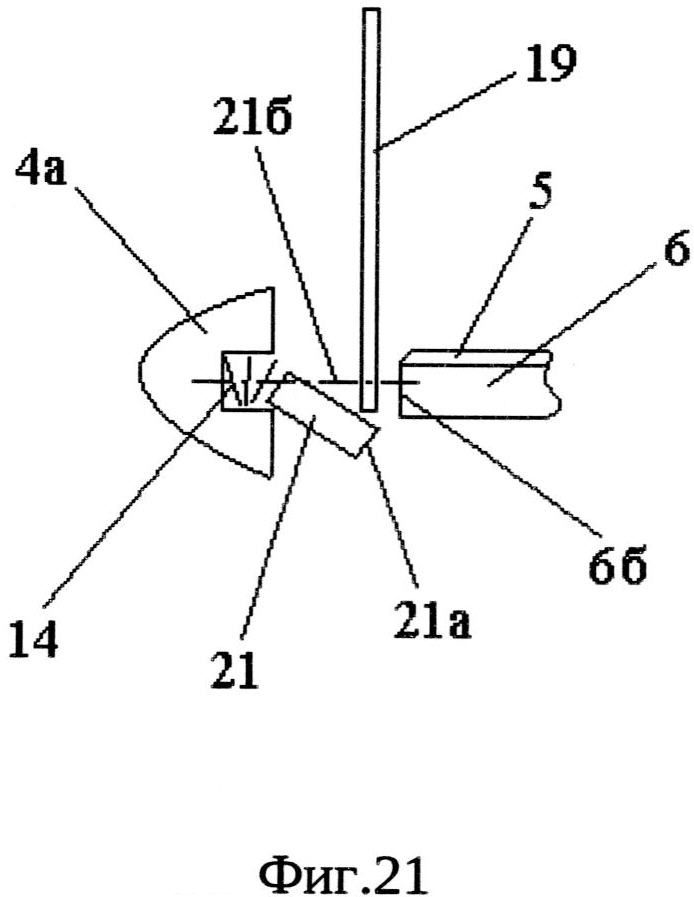
на фиг.21 - вид на фиг.20 после взаимодействия подвижного элемента фиксатора с направляющим стержнем и наклона относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса.
Линейный электромеханический преобразователь ударного действия состоит из индуктора 1, подключаемого к импульсному источнику, например емкостному накопителю энергии (не показан), подвижного якоря 2 и бойка 3, которые коаксиально расположены внутри ферромагнитного корпуса 4. Корпус 4 выполнен из бокового цилиндрического 4а и двух торцевых дисковых 4б и 4в участков, которые выполнены с возможностью разъединения.
Индуктор 1 выполнен в виде катушки с центральным отверстием 1а.
Якорь 2 выполнен в виде электропроводящего диска 5 с центральным отверстием, плоская поверхность 5а которого прилегает к индуктору 1, и коаксиально расположенного и соединенного с ним ударного диска 6, который, в свою очередь, соединен с бойком 3.
Электропроводящий 5 и ударный 6 диски якоря 2 соединены между собой (не показано).
Заостренный конец 3а бойка направлен в сторону объекта деформирования 7, в котором боек 3 выполняет отверстия 7а.
Между торцевым дисковым участком 4в ферромагнитного корпуса с аксиальным направляющим отверстием 4 г и электропроводящим диском 5 якоря установлена возвратная пружина 8, обладающая малой жесткостью.
Индуктор 1 прикреплен к боковому цилиндрическому участку 4а ферромагнитного корпуса 4, например, при помощи крепежных элементов 9 так, что между его плоской поверхностью 1б и торцевым дисковым участком 4б ферромагнитного корпуса выполнен зазор 10.
В зазоре 10 коаксиально расположен аксиально подвижный ферромагнитный сердечник 11 в форме диска с центральным выступом 11а.
Центральный выступ 11а сердечника 11 выполнен с возможностью перемещения внутри центрального отверстия 1а индуктора 1.
Одна из торцевых сторон 11б диска сердечника 11 выполнена с возможностью прилегания к плоской стороне 1б индуктора, а вторая сторона 11в выполнена с возможностью прилегания к дисковому участку 4б ферромагнитного корпуса.
Между центральным выступом 6а ударного диска, расположенном в центральных отверстиях электропроводящего диска 5 якоря и индуктора 1, и центральным выступом 11а ферромагнитного сердечника установлена силовая аксиально сжимаемая пружина 12, выполненная из ферромагнитного материала и обладающая высокой жесткостью.
Ударный диск 6 якоря соединен с бойком 3, который выполнен с возможностью перемещения через центральное направляющее отверстие 4г торцевого дискового участка 4в ферромагнитного корпуса.
Ударный диск 6 якоря взаимодействует, например, с четырьмя фиксаторами 13, которые в тангенциальном направлении упорядоченно, например, равномерно закреплены на боковом цилиндрическом участке 4а ферромагнитного корпуса (фиг.13).
Фиксатор 13 содержит упругий элемент 14, который обеспечивает возможность сжатия в направлении бокового цилиндрического участка 4а ферромагнитного корпуса, при котором обеспечивается аксиальное перемещение якоря 2 (фиг.4, фиг.5). Упругий элемент 14 выполнен, например, в виде спиральной пружины.
Подвижный элемент 15 фиксатора 13, который взаимодействует с якорем 2, содержит закругленный участок 15а (фиг.4, фиг.5).
На фиг.6 и фиг.7 показан фиксатор 13, который выполнен в виде упругой изогнутой скобы. Концевые участки скобы 13а и 13б расположены с возможностью перемещения в пазах 16 и 17 бокового цилиндрического участка 4а ферромагнитного корпуса. Максимально выступающий участок 13в скобы выполнен со смещением в направлении индуктора 1 относительно концевых участков 13а и 13б.
В центральном отверстии 11г подвижного ферромагнитного сердечника 11 размещен центральный направляющий штырь 18, прикрепленный к торцевому дисковому участку 4б ферромагнитного корпуса.
Плоская поверхность 5а электропроводящего диска якоря, взаимодействующая с фиксатором 13, выполнена со скосом 5б (фиг.4 и фиг.5).
К ферромагнитному сердечнику 11 присоединены направляющие стержни 19, аксиально направленно и упорядоченно, например равномерно, расположенные в тангенциальном направлении. На фиг.12 показано четыре стержня 19, которые проходят через направляющие отверстия в изоляционном цилиндре 20, крепящем индуктор 1 к боковому цилиндрическому участку 4а ферромагнитного корпуса.
Каждый направляющий стержень 19, присоединенный к ферромагнитному сердечнику 11, выполнен с возможностью взаимодействия с фиксатором 13, обеспечивая перемещение подвижного элемента 15 фиксатора в направлении бокового цилиндрического участка 4а ферромагнитного корпуса (фиг.14 и фиг.15). Подвижный элемент фиксатора 15 содержит наклонные участки 15а и 15б, которые при взаимодействии с направляющим стержнем 19 и электропроводящим диском 5 якоря 2 обеспечивают его перемещение в направлении бокового цилиндрического участка 4а ферромагнитного корпуса.
Подвижный элемент фиксатора 13 может быть выполнен в виде подпружиненного постоянного магнита 21, длинная боковая сторона 21а которого установлена напротив боковой стороны 6б ферромагнитного ударного диска якоря 2 (фиг.16 - фиг.21). Подвижный элемент фиксатора 15 (фиг.4 и фиг.5) и постоянный магнит 21 закреплены относительно бокового цилиндрического участка 4а ферромагнитного корпуса при помощи упругого элемента 14 и направляющего стержня 22 (фиг.4, 5, 16-19).
Подпружиненный постоянный магнит 21 фиксатора 13 может быть выполнен с возможностью поворота (фиг.16-19) или наклона (фиг.20-21) относительно оси 21б, перпендикулярной боковому цилиндрическому участку 4а ферромагнитного корпуса.
Линейный электромеханический преобразователь ударного действия работает следующим образом.
В исходном состоянии ферромагнитный сердечник 11 при помощи силовой пружины 12 прижат к торцевому дисковому участку 4б корпуса 4, а якорь 2 при помощи возвратной пружины 8 своим электропроводящим диском 5 прижат к индуктору 1 и удерживается фиксаторами 13. При этом пружины 8 и 12 находятся в разжатом состоянии (фиг.1, фиг.8).
При подключении индуктора 1 к емкостному накопителю энергии ток в индукторе возбуждает магнитное поле, которое, замыкаясь по ферромагнитному корпусу и сердечнику 11, индуцирует вихревые токи в электропроводящем диске 5 якоря 2. При этом со стороны индуктора 1 на сердечник 11 действуют электромагнитные силы притяжения, а на электропроводящий диск 5 якоря действуют электродинамические силы отталкивания.
На начальном этапе работы, когда индуцированный ток в электропроводящем диске 5 нарастает, якорь 2 удерживается фиксаторами 13 в исходном положении. В это время ферромагнитный сердечник 11 приближается к индуктору 1, сжимая своим центральным выступом 11а силовую пружину 12 (фиг.2, фиг.9). При этом происходит усиление магнитного поля в зоне электропроводящего диска 5 якоря.
За счет удержания якоря 2, при котором существует максимальная магнитная связь, и усиления магнитного поля между его электропроводящим диском 5 и индуктором 1 образуются наибольшие электродинамические силы отталкивания. При этом электродинамические силы отталкивания, действующие на электропроводящий диск 5 якоря, суммируются с силами сжатия силовой пружины 12.
Если преобразователь выполнен с центральным направляющим штырем 18, по которому перемещается сердечник 11, то суммарные аксиально направленные силы со стороны ударного диска 6 якоря 2 сжимают упругий элемент 14 фиксатора 13 в направлении бокового цилиндрического участка 4а ферромагнитного корпуса 4, обеспечивая аксиальное перемещение якоря 2 (фиг.5).
Боек 3 под действие значительной суммарной силы стремительно перемещается в сторону объекта деформирования 7, пробивая заостренным концом 3а отверстие 7а. При этом возвратная пружина 8 сжимается (фиг.3, фиг.10).
После затухания токового импульса в индукторе 1 возвратная пружина 8 перемещает якорь 2 в исходное положение до соприкосновения с индуктором. При этом центральный выступ 6а ударного диска 6 через жесткую силовую пружину 12 перемещает сердечник 11 до соприкосновения с торцевым дисковым участком 4б корпуса 4 (фиг.1, фиг.8). После этого происходит смещение объекта деформирования 7 так, что напротив бойка располагается непробитый участок.
Поскольку плоская поверхность 5а электропроводящего диска якоря, взаимодействующая с фиксатором 13, выполнена со скосом 5б, то сила удержания якоря на рабочем этапе в направлении объекта деформирования 7 существенно больше, чем на этапе возвратного перемещения якоря под действием пружины 8 в обратную сторону (фиг.4). Якорь 2 аксиально перемещается относительно фиксатора 13 за счет того, что его подвижный элемент 15, содержащий закругленный участок 15а, сжимая упругую спиральную пружину 14, перемещается в направлении бокового цилиндрического участка 4а ферромагнитного корпуса (фиг.5).
Если фиксатор 13 выполнен в виде упругой изогнутой скобы, то за счет I того, что ее максимально выступающий участок 13в выполнен со смещением в направлении индуктора 1 относительно концевых участков 13а и 13б, сила удержания якоря на рабочем этапе в направлении объекта деформирования 7 существенно больше, чем на этапе возвратного перемещения якоря под действием пружины 8 в обратную сторону (фиг.6). Якорь 2 аксиально перемещается относительно такого фиксатора за счет того, что скоба радиально сжимается и ее концевые участки 13а и 13б перемещаются в пазах 16 и 17 бокового цилиндрического участка 4а ферромагнитного корпуса (фиг.7).
Если подвижный элемент фиксатора 13 выполнен в виде подпружиненного постоянного магнита 21 и его длинная боковая сторона 21а установлена напротив боковой стороны 6б ферромагнитного ударного диска 6 якоря 2, то между магнитом 21 и ферромагнитным диском действует значительная сила притяжения, удерживающая якорь в исходном положении (фиг.16, фиг.17, фиг.20).
При воздействии направляющего стержня 19, присоединенного к ферромагнитному сердечнику 11, на постоянный магнит 21 за счет упругого элемента 14 происходит поворот (фиг.18, фиг.19) или наклон (фиг.21) магнита 21. При этом напротив боковой стороны 6б ферромагнитного ударного диска 6 якоря 2 расположена малая часть длинной боковой стороны 21а магнита, что делает силу притяжения между ними небольшой. В результате происходит отпускание фиксатором 13 якоря 2 для перемещения в сторону объекта деформирования 7 под действием суммарной аксиальной силы.
Таким образом, в предлагаемом линейном электромеханическом преобразователе ударного действия развиваются значительные суммарные силовые воздействия, которые передаются от бойка на объект деформирования, что повышает эффективность преобразования электрической энергии импульсного источника в кинетическую энергию силовых импульсов.
Источники информации
1. Патент РФ №2018377, МКИ В06В 1/04. - Опубл. 30.08.94 г., Бюл. №16.
2. А.с. СССР №796132, МКИ B65G 65/40. - Опубл. 15.01.81 г., Бюл. №2.
3. Тютькин В.А. Магнитно-импульсный способ разрушения сводов и очистки технологического оборудования от налипших материалов // Электротехника. - М. - 2002. - №11. - С.24-28.
4. Патент Украины №97561, МКИ G06F 12/14. - Опубл. 27.02.2012, Бюл. №4 (прототип).
Изобретение относится к электромеханике и может быть использовано в ударных приводах машин и механизмов, которые предназначены для создания циклических ударных импульсов, например, при деформации объектов в технологическом процессе. Технический результат заключается в повышении эффективности линейного электромеханического преобразователя ударного действия. Линейный электромеханический преобразователь ударного действия состоит из индуктора, подвижного якоря и бойка, которые расположены внутри ферромагнитного корпуса. Якорь выполнен в виде электропроводящего диска и соединенного с ним ударного диска, который соединен с бойком. Заостренный конец бойка направлен в сторону объекта деформирования. Между торцевым дисковым участком ферромагнитного корпуса и электропроводящим диском якоря установлена возвратная пружина. Между центральным выступом диска и центральным выступом подвижного ферромагнитного сердечника установлена силовая пружина. При подключении индуктора к емкостному накопителю энергии ток в индукторе возбуждает магнитное поле, которое, замыкаясь по ферромагнитному корпусу и сердечнику, индуцирует вихревые токи в электропроводящем диске якоря. 13 з.п. ф-лы, 21 ил.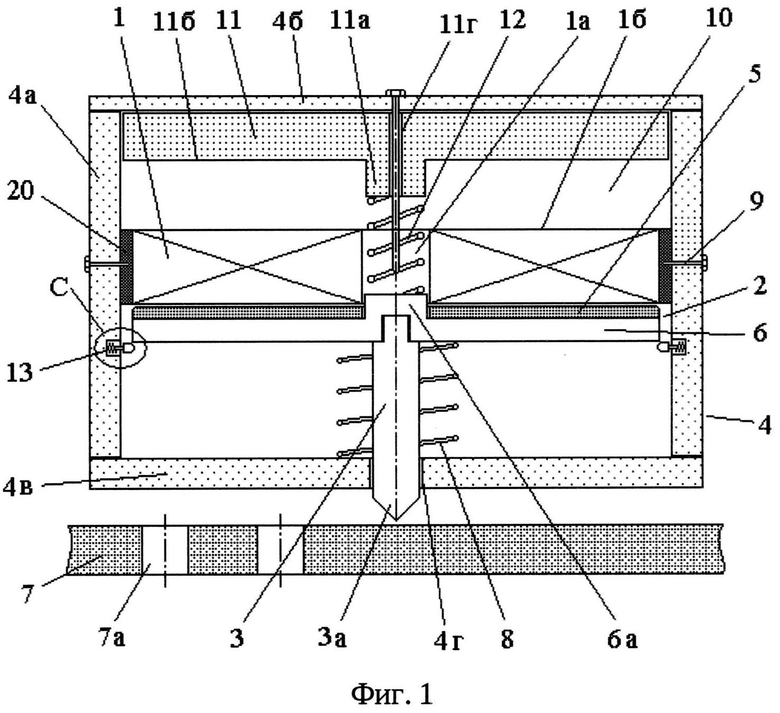
1. Линейный электромеханический преобразователь ударного действия, содержащий коаксиально расположенные ферромагнитный корпус, индуктор, подвижные якорь и боек, внутри ферромагнитного корпуса, выполненного с боковым цилиндрическим и торцевыми дисковыми участками, расположены индуктор и электропроводящий диск якоря, индуктор выполнен в виде катушки с центральным отверстием, якорь выполнен в виде электропроводящего диска с центральным отверстием, плоская поверхность которого прилегает к индуктору, и коаксиально расположенного ударного диска, взаимодействующего с бойком, заостренный конец которого направлен в сторону объекта деформирования, между торцевым дисковым участком ферромагнитного корпуса с аксиальным направляющим отверстием и электропроводящим диском якоря установлена возвратная пружина, отличающийся тем, что индуктор прикреплен к боковому цилиндрическому участку ферромагнитного корпуса так, что между его плоской поверхностью и торцевым дисковым участком ферромагнитного корпуса, удаленным от объекта деформирования, выполнен зазор, в котором коаксиально расположен аксиально подвижный ферромагнитный сердечник в форме диска с центральным выступом, который выполнен с возможностью перемещения внутри центрального отверстия индуктора, одна из торцевых сторон диска сердечника выполнена с возможностью прилегания к плоской стороне индуктора, а вторая сторона выполнена с возможностью прилегания к дисковому участку ферромагнитного корпуса, электропроводящий и ударный диски якоря соединены между собой, причем между центральным выступом ударного диска, расположенном в центральных отверстиях электропроводящего диска якоря и индуктора, и центральным выступом подвижного ферромагнитного сердечника установлена силовая аксиально сжимаемая пружина, ударный диск якоря, взаимодействующий с по крайней мере тремя фиксаторами, упорядоченно в тангенциальном направлении закрепленными на боковом цилиндрическом участке ферромагнитного корпуса, соединен с бойком, выполненным с возможностью перемещения через центральное направляющее отверстие торцевого дискового участка ферромагнитного корпуса.
2. Линейный электромеханический преобразователь по п.1, отличающийся тем, что фиксатор содержит упругий элемент с возможностью сжатия в направлении бокового цилиндрического участка ферромагнитного корпуса, при котором обеспечивается аксиальное перемещение якоря.
3. Линейный электромеханический преобразователь по п.2, отличающийся тем, что взаимодействующий с якорем элемент фиксатора содержит закругленный участок.
4. Линейный электромеханический преобразователь по п.2, отличающийся тем, что фиксатор выполнен в виде упругой изогнутой скобы, концевые участки которой расположены с возможностью перемещения в пазах бокового цилиндрического участка ферромагнитного корпуса, а максимально выступающий участок выполнен со смещением в направлении индуктора относительно концевых участков.
5. Линейный электромеханический преобразователь по п.1, отличающийся тем, что в центральном отверстии подвижного ферромагнитного сердечника размещен центральный направляющий штырь, прикрепленный к торцевому дисковому участку ферромагнитного корпуса, удаленному от объекта деформирования.
6. Линейный электромеханический преобразователь по п.3, отличающийся тем, что поверхность электропроводящего диска якоря, взаимодействующая с фиксатором, выполнена со скосом.
7. Линейный электромеханический преобразователь по п.1, отличающийся тем, что к ферромагнитному сердечнику присоединены аксиально направленные и упорядоченно расположенные в тангенциальном направлении по крайней мере три направляющих стержня, проходящих через направляющие отверстия в изоляционном цилиндре, крепящем индуктор к боковому цилиндрическому участку ферромагнитного корпуса.
8. Линейный электромеханический преобразователь по п.7, отличающийся тем, что направляющий стержень, присоединенный к ферромагнитному сердечнику, выполнен с возможностью взаимодействия с фиксатором, обеспечивая перемещение подвижного элемента фиксатора в направлении бокового цилиндрического участка ферромагнитного корпуса.
9. Линейный электромеханический преобразователь по п.8, отличающийся тем, что подвижный элемент фиксатора содержит наклонные участки, которые при взаимодействии с направляющим стержнем и электропроводящим диском якоря обеспечивают его перемещение в направлении бокового цилиндрического участка ферромагнитного корпуса.
10. Линейный электромеханический преобразователь по п.7, отличающийся тем, что направляющий стержень, присоединенный к ферромагнитному сердечнику, выполнен с возможность взаимодействия с подвижным элементом фиксатора, выполненным в виде подпружиненного постоянного магнита, длинная боковая сторона которого установлена напротив боковой стороны ферромагнитного ударного диска якоря.
11. Линейный электромеханический преобразователь по п.10, отличающийся тем, что подпружиненный постоянный магнит фиксатора выполнен с возможностью поворота относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса.
12. Линейный электромеханический преобразователь по п.10, отличающийся тем, что подпружиненный постоянный магнит фиксатора выполнен с возможностью наклона относительно оси, перпендикулярной боковому цилиндрическому участку ферромагнитного корпуса.
13. Линейный электромеханический преобразователь по п.1, отличающийся тем, что силовая аксиально сжимаемая пружина выполнена из ферромагнитного материала.
14. Линейный электромеханический преобразователь по п.1, отличающийся тем, что боковая цилиндрическая и торцевые дисковые участки ферромагнитного корпуса выполнены с возможностью разъединения.
| Устройство для изготовления полуцилиндрических теплоизоляционных изделий | 1952 |
|
SU97561A1 |
| ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 1994 |
|
RU2091971C1 |
| Ударный механизм электродинамического действия | 1976 |
|
SU602676A1 |
| US 0004188552 A1, 12.02.1980 | |||

