ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству считывания изображения и способу считывания изображения, в котором изображение поверхности объекта считывают путем захвата изображения объекта с задней стороны панели обнаружения, осуществляя при этом вращательное перемещение (прокатку) объекта на поверхности панели обнаружения, и конкретно - к устройству и способу, подходящему для считывания кругового («прокатанного») отпечатка пальца.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В качестве одного из способов для идентификации личности существует способ, использующий отпечаток пальца. В таком способе обычно изображение отпечатка пальца вводится в устройство, и введенное изображение сравнивается с предварительно зарегистрированными изображениями отпечатков пальцев. В качестве способа осуществления ввода изображения отпечатка пальца использовали способ, в котором покрытый краской палец прижимается к поверхности бумаги и посредством этого отпечаток пальца переносится на поверхность бумаги, и затем поверхность бумаги, на которую перенесен отпечаток пальца, считывается сканером изображения. Кроме того, если необходим отпечаток пальца, имеющий большую область, в том числе бока пальца, отпечаток пальца целиком (круговой отпечаток пальца) переносят на поверхность бумаги, осуществляя вращательное перемещение покрытого краской пальца таким образом, что палец прокатывается на поверхности бумаги.
Однако в вышеописанном способе имеются недостатки, что палец окрашивается краской, и способ нуждается в бумаге. В частности, в случае перенесения отпечатка пальца путем вращательного перемещения пальца, если вращательное перемещение пальца на поверхности бумаги не осуществляется надлежащим образом, то действие должно повторяться многократно. Кроме того, при всякой необходимости повторения действия палец вытирают, чтобы удалить приставшую краску, и требуется новая бумага. Кроме того, в вышеописанном способе каждый лист бумаги, на который переносится отпечаток пальца, необходимо считывать только по одному при использовании сканера изображения, чтобы преобразовывать изображение в данные, и таким образом обуславливая затруднительность процесса в целом.
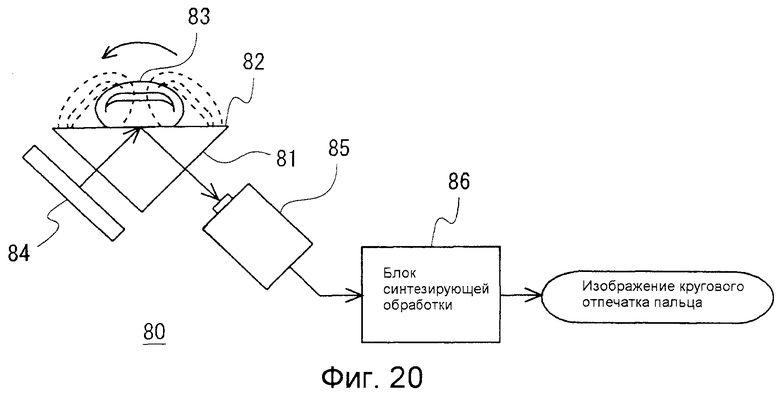
Соответственно, в Патентной литературе 1-3, например, предлагается устройство 80 считывания изображения, в котором: палец 83 помещают на поверхность 82 обнаружения треугольной призмы (оптической призмы) 81; палец 83 облучается светом снизу с помощью источника 84 света; и круговое изображение отпечатка пальца при этом захватывают цифровой камерой 85, оснащенной двумерным сенсором, таким как прибор с зарядовой связью (CCD) (твердотельное устройство захвата изображения)), как показано на Фиг. 20.
Для получения кругового изображения отпечатка пальца цифровая камера 85 приводится в движение последовательным образом с частотой кадров от 30 кадр/с до 60 кадр/с, например, тогда как человек-объект осуществляет вращательное перемещение своего пальца 83 на поверхности 82 обнаружения, так что полное изображение пальца 83 от одного бока до другого бока пальца захватывается в виде движущихся изображений. После этого изображения из множества кадров, которые получены посредством процесса захвата движущегося изображения, объединяются блоком 86 синтезирующей обработки, и посредством этого генерируется одно статическое изображение. Таким образом, получают данные изображения кругового отпечатка пальца, полученного преобразованием изображений от одного бока до другого бока пальца 83 в одно изображение.
Список цитат
Патентная литература
Патентная литература 1: Патент Японии № 3353878
Патентная литература 2: Публикация нерассмотренной заявки на патент Японии № 2000-268162
Патентная литература 3: Публикация нерассмотренной заявки на патент Японии № 2000-67208
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача изобретения
Однако в устройстве 80 считывания изображения, раскрытом в патентной литературе 1-3, необходимо с фиксацией размещать конструктивно большую цифровую камеру, и таким образом необходимо обеспечивать пространство для размещения цифровой камеры в устройстве, что тем самым вызывает проблему увеличения габаритного размера устройства.
Кроме того, в вышеописанном устройстве 80 считывания изображения одно статическое изображение создается из изображений множества кадров. Следовательно, если только палец 83 не осуществляет вращательное перемещение с постоянной скоростью, имеют место искажения на стыках между изображениями в синтезированном статическом изображении. Однако является весьма трудным осуществлять вращательное перемещение пальца 83 с постоянной скоростью. Следовательно, устройство необходимо обеспечить конфигурацией для коррекции искажений при синтезе изображения и/или для удалении искажений из синтезированного изображения. В результате усложненная функция коррекции изображения является обязательной для устройства. Следовательно, схемное и программное обеспечение для обработки сигналов усложняются, и таким образом вызывают проблему, что цена устройства повышается.
Соответственно, настоящее изобретение было выполнено для решения вышеописанных проблем, и объект такового состоит в обеспечении устройства считывания изображения, допускающего уменьшение размера устройства, получение отличного изображения без искажения или с небольшим искажением без использования усложненной обработки сигналов и, следовательно, снижение стоимости устройства.
Решение задачи изобретения
Для решения вышеописанной задачи изобретения устройством считывания изображения согласно осуществлению настоящего изобретения является устройство считывания изображения, которое считывает изображение поверхности объекта при вращательном перемещении объекта в направлении субсканирования, включающее в себя: воспринимающую касание панель, которая выводит позицию нажима, нажатую объектом, в виде информации координат в направлении субсканирования, причем объект помещен на поверхность воспринимающей касание панели; линейный сенсор, который воспринимает изображение объекта, помещенного на воспринимающую касание панель, с задней стороны воспринимающей касание панели в направлении основного сканирования, и выводит сигнал изображения; средство обнаружения, для обнаружения (определения) величины перемещения позиции нажима объекта по отношению к направлению субсканирования на воспринимающей касание панели на основании информации координат, выводимой из воспринимающей касание панели; и средство передвижения сенсора для перемещения линейного сенсора в направлении субсканирования с тем, чтобы следовать за вращательным перемещением объекта на основании величины перемещения, обнаруженной средством обнаружения.
Кроме того, способом считывания изображения согласно варианту осуществления настоящего изобретения является способ считывания изображения для считывания изображения поверхности объекта при вращательном перемещении объекта в направлении субсканирования, включающий в себя: вывод позиции нажима, нажатой объектом, в виде информации координат в направлении субсканирования; обнаружение величины перемещения позиции нажима объекта по отношению к направлению субсканирования на основании информации координат; и перемещение линейного сенсора в направлении субсканирования с тем, чтобы следовать за вращательным перемещением объекта, на основании величины перемещения.
Полезные эффекты изобретения
Как описано выше, согласно настоящему изобретению является возможным уменьшить размер устройства. Кроме того, является возможным получать отличное изображение без искажения или с небольшим искажением без использования усложненной обработки сигналов и тем самым уменьшить стоимость устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1A - вид в перспективе, показывающий примерный вариант осуществления устройства считывания изображения согласно настоящему изобретению.
Фиг. 1B - вид в плане, показывающий примерный вариант осуществления устройства считывания изображения согласно настоящему изобретению.
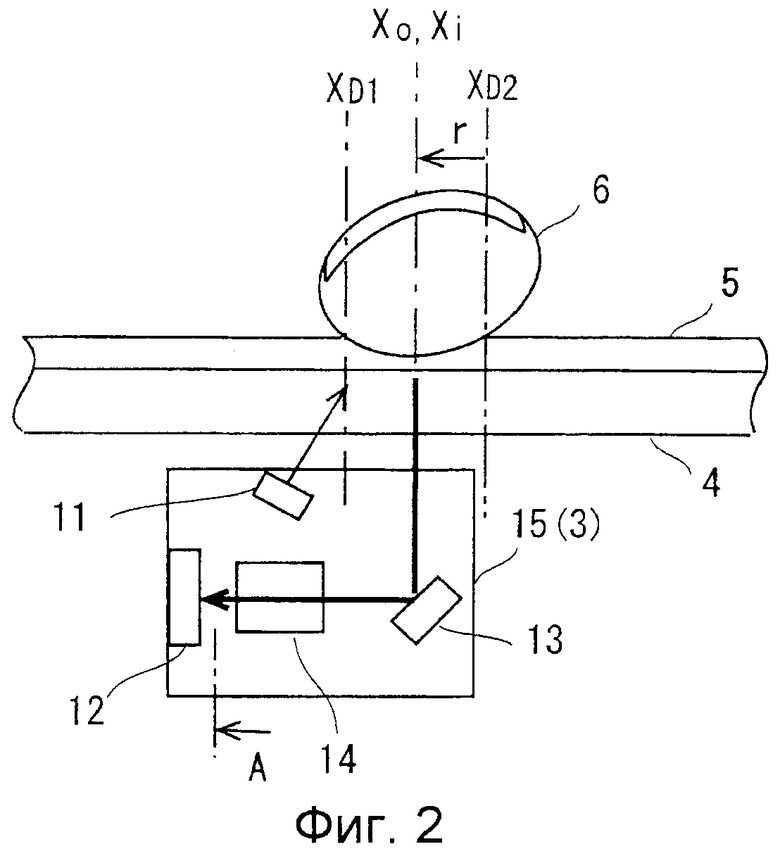
Фиг. 2 - поперечное сечение устройства считывания изображения.
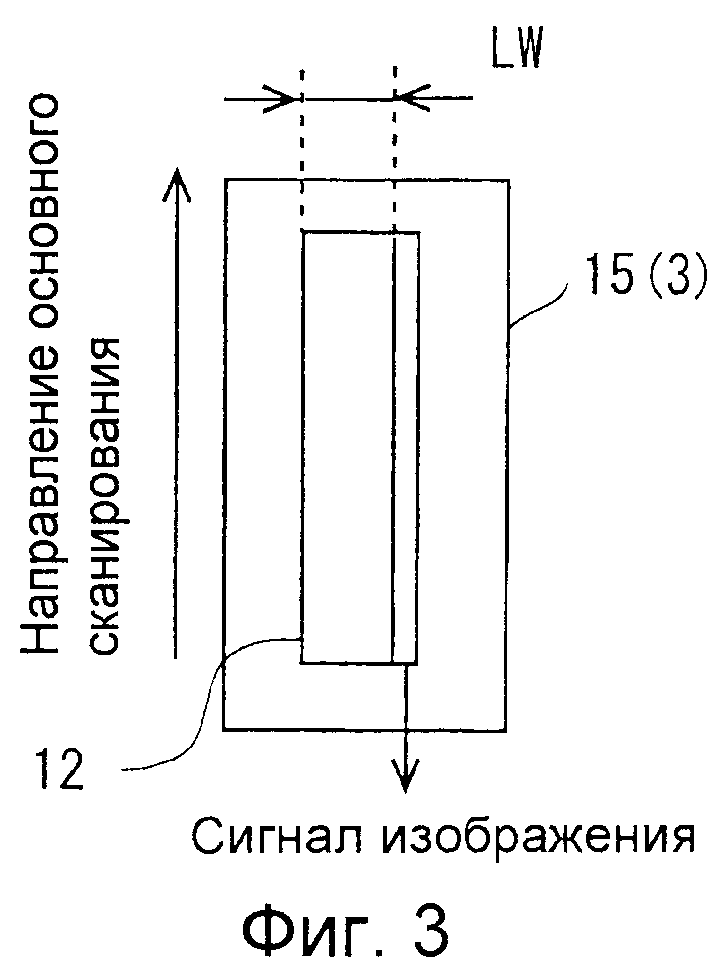
Фиг. 3 - вид в плане CCD, показанного на Фиг. 2 (рассматриваемый в направлении, обозначенном стрелкой A).
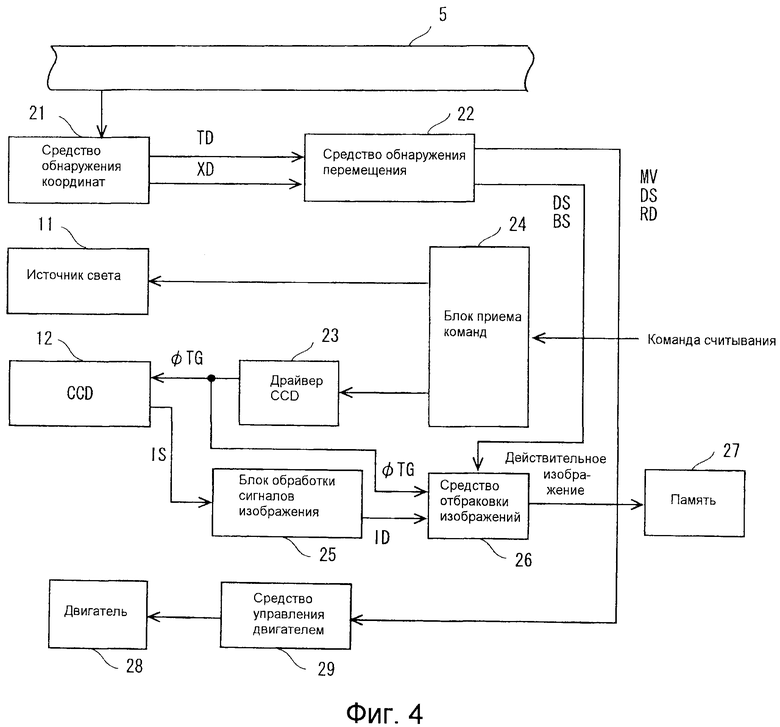
Фиг. 4 - блок-схема, показывающая функциональную конфигурацию устройства считывания изображения.
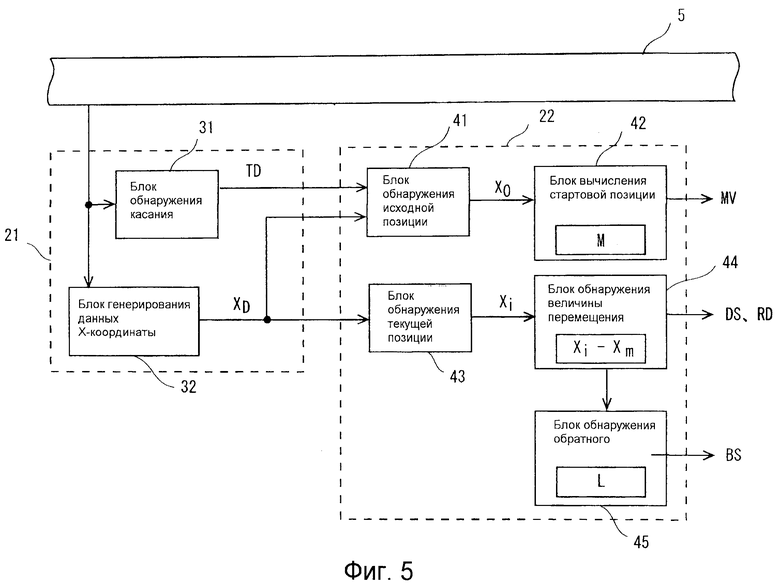
Фиг. 5 - конфигурация средства обнаружения координат и средства обнаружения перемещения, показанных на Фиг. 4.
Фиг. 6 - способ обнаружения позиции нажима.
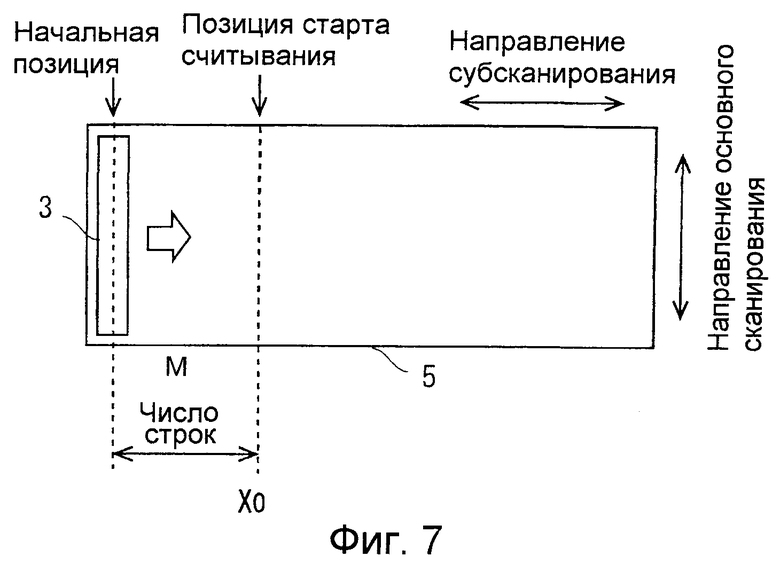
Фиг. 7 - способ вычисления величины перемещения по отношению к позиции начала считывания.
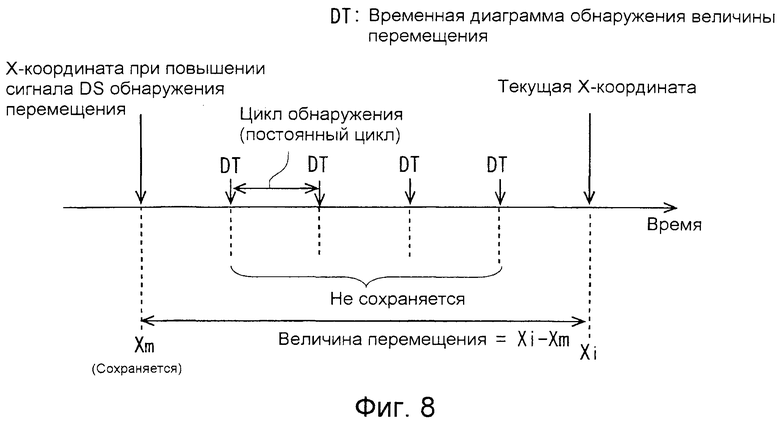
Фиг. 8 - способ обнаружения величины перемещения пальца.
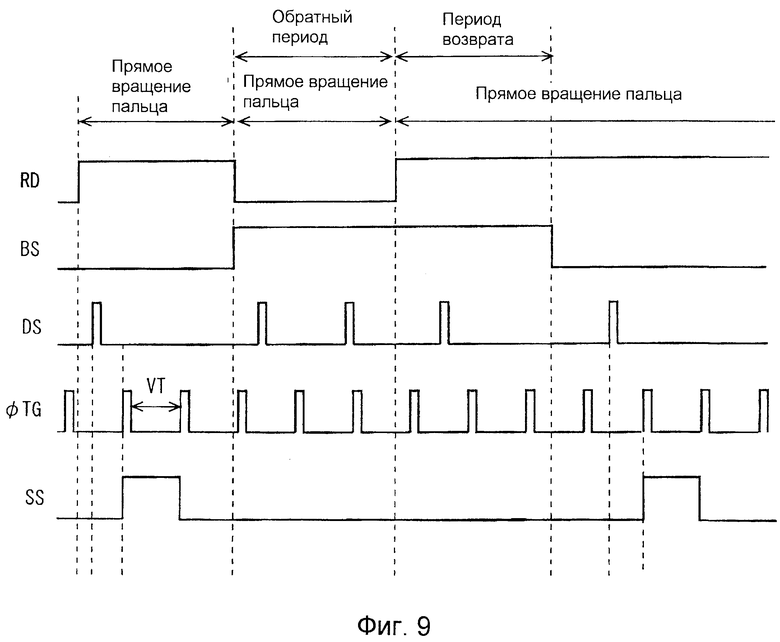
Фиг. 9 - временная диаграмма, показывающая способ отбраковки достоверности/недостоверности данных изображения.
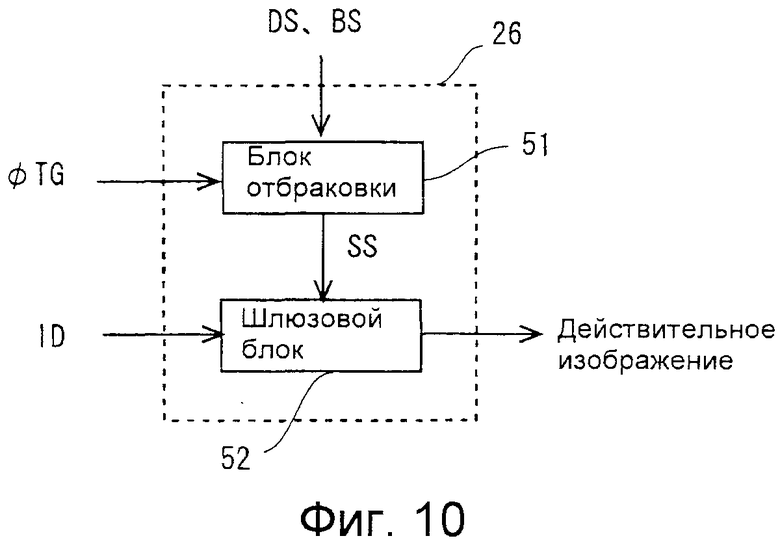
Фиг. 10 - конфигурация средства отбраковки изображения.
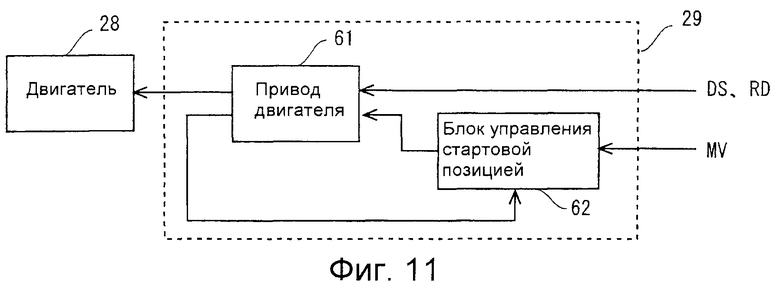
Фиг. 11 - конфигурация средства управления двигателем.
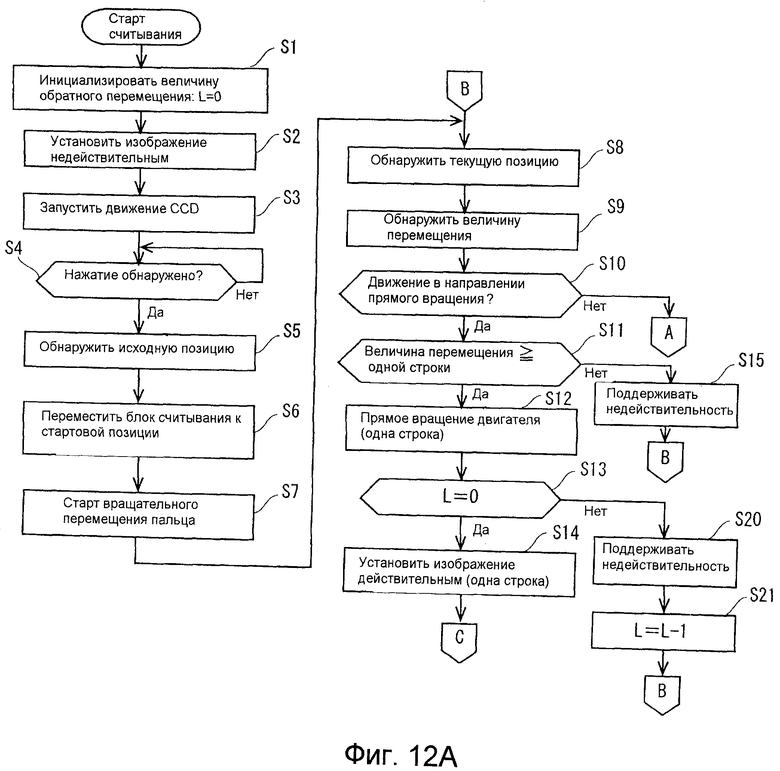
Фиг. 12A - основная структурная схема, показывающая последовательность операций устройства считывания изображения.
Фиг. 12B - основная структурная схема, показывающая последовательность операций устройства считывания изображения.
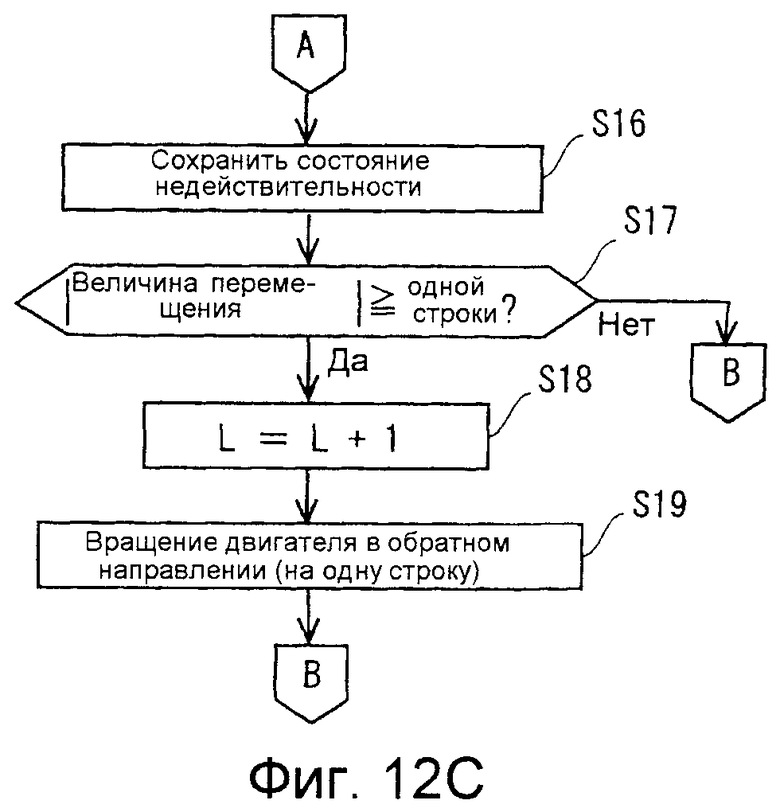
Фиг. 12C - основная структурная схема, показывающая последовательность операций устройства считывания изображения.
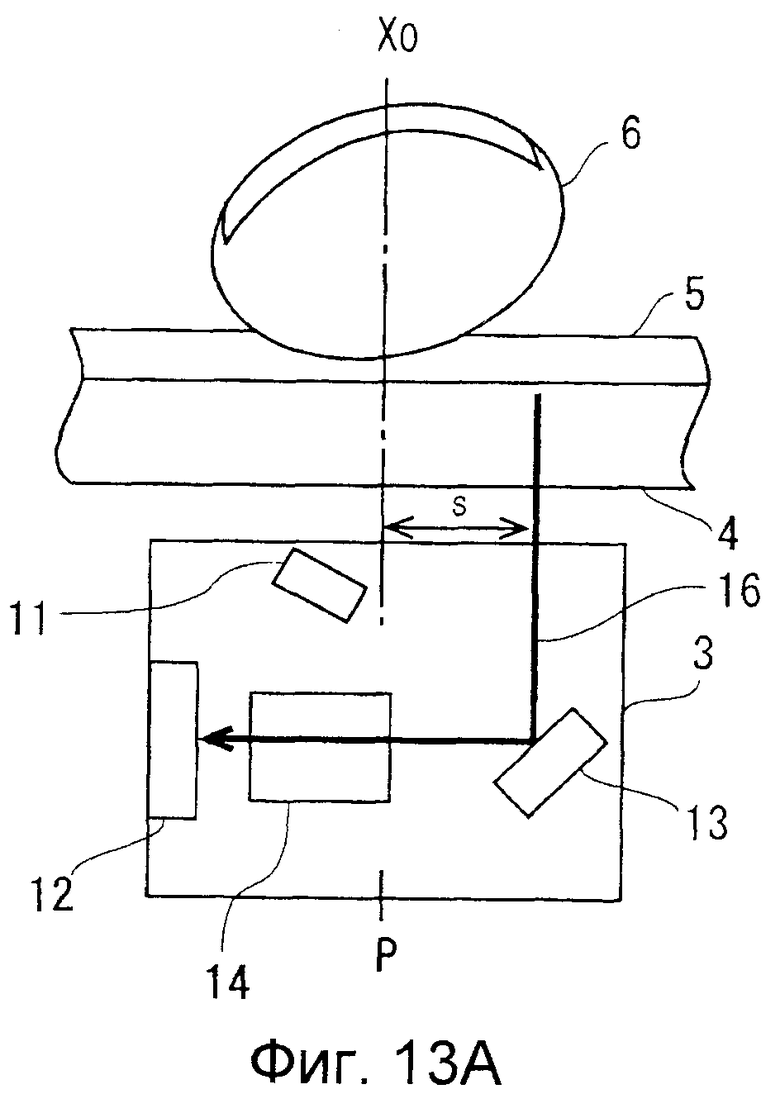
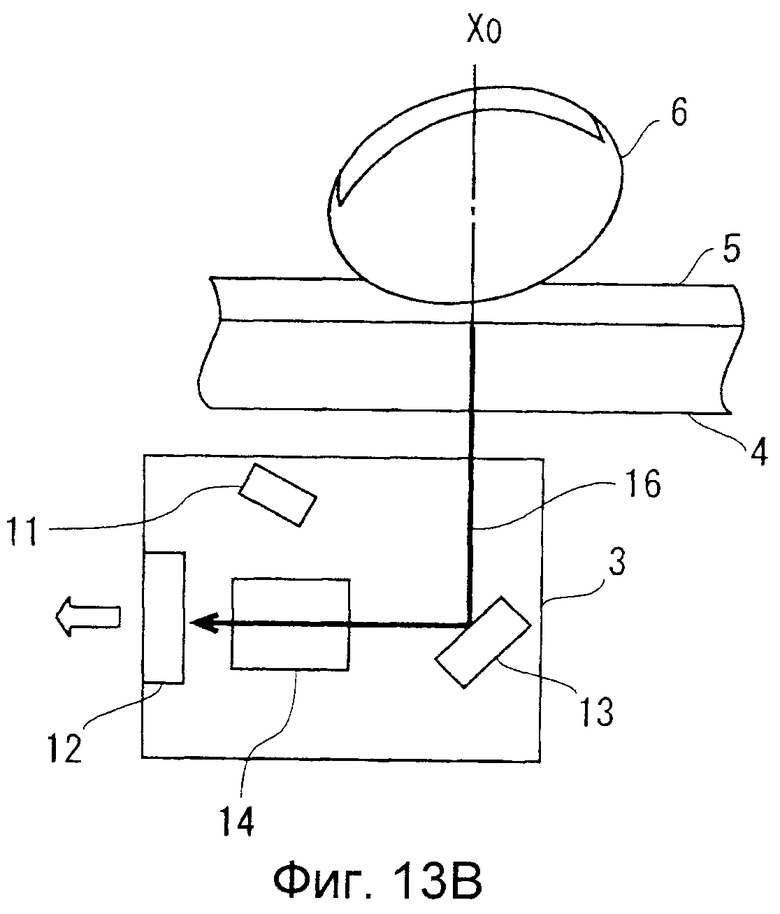
Фиг. 13A показывает коррекцию позиции блока считывания и показывает состояние до коррекции.
Фиг. 13B показывает коррекцию позиции блока считывания и показывает состояние после коррекции.
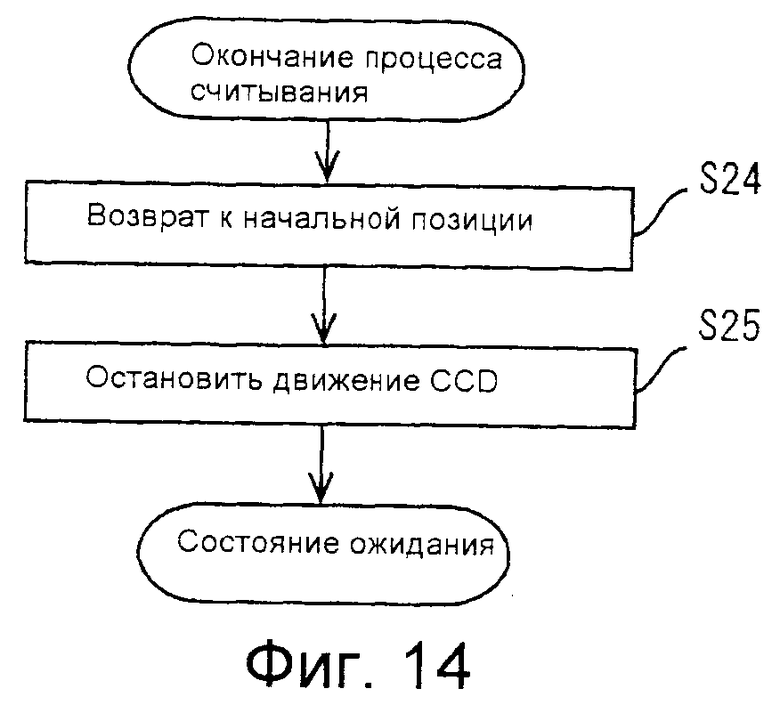
Фиг. 14 - структурная подсхема, показывающая последовательность операций для процесса окончания считывания.
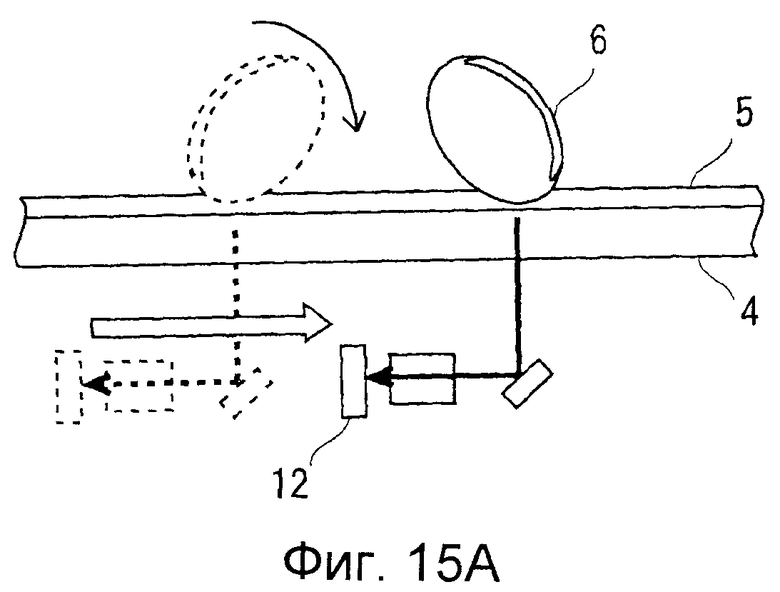
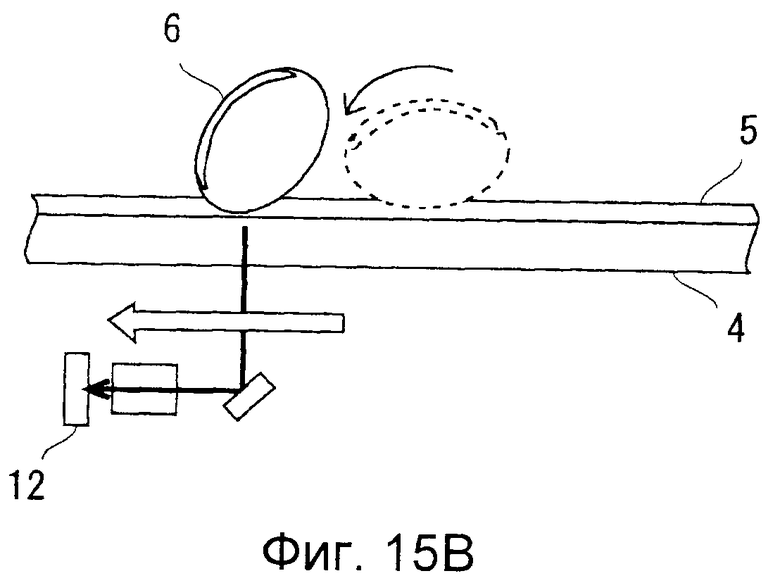
Фиг. 15A - взаимосвязь между вращательным перемещением пальца и перемещением CCD.
Фиг. 15B - взаимосвязь между вращательным перемещением пальца и перемещением CCD.
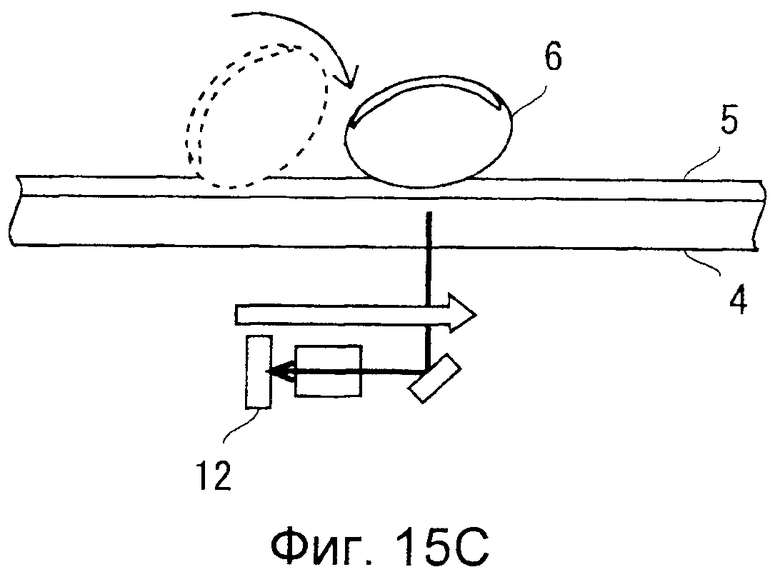
Фиг. 15C - взаимосвязь между вращательным перемещением пальца и перемещением CCD.
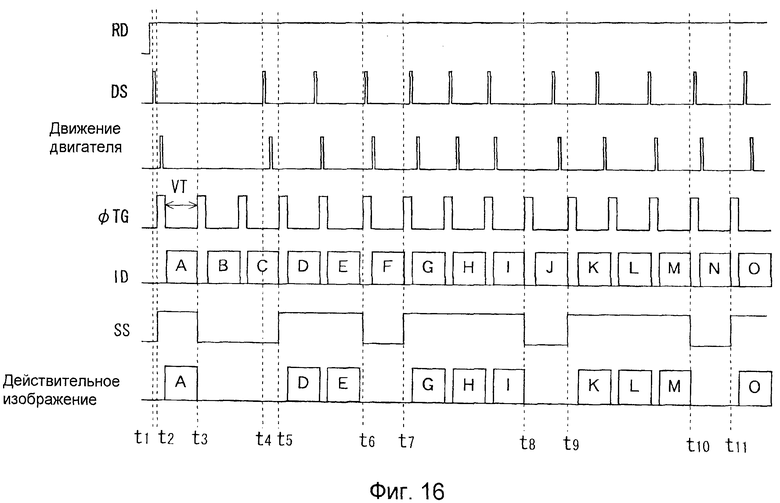
Фиг. 16 - временная диаграмма, показывающая работу устройства считывания изображения, и показывающая работу в случае, где помещенный на воспринимающую касание панель палец вращательно перемещают только в направлении прямого вращения.
Фиг. 17 - временная диаграмма, показывающая работу устройства считывания изображения, и показывающая работу в случае, где направление вращательного перемещения пальца, помещенного на воспринимающую касание панель, изменено на обратное.
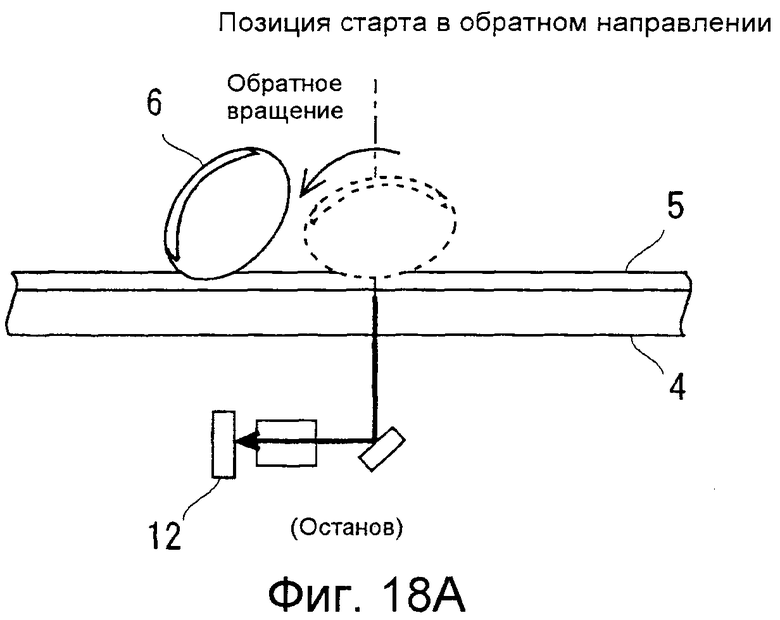
Фиг. 18A - взаимосвязь между измененным на обратное вращательным перемещением пальца и перемещением CCD.
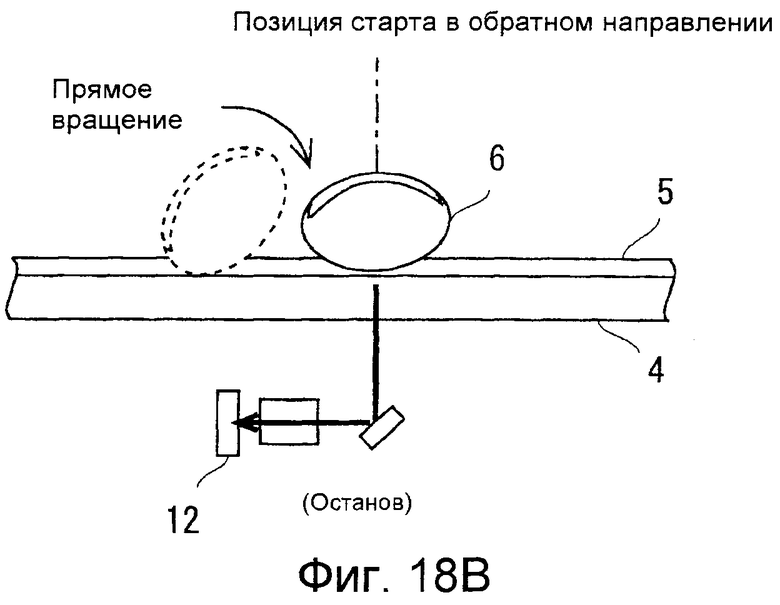
Фиг. 18B - взаимосвязь между измененным на обратное вращательным перемещением пальца и перемещением CCD.
Фиг. 18C - взаимосвязь между измененным на обратное вращательным перемещением пальца и перемещением CCD.
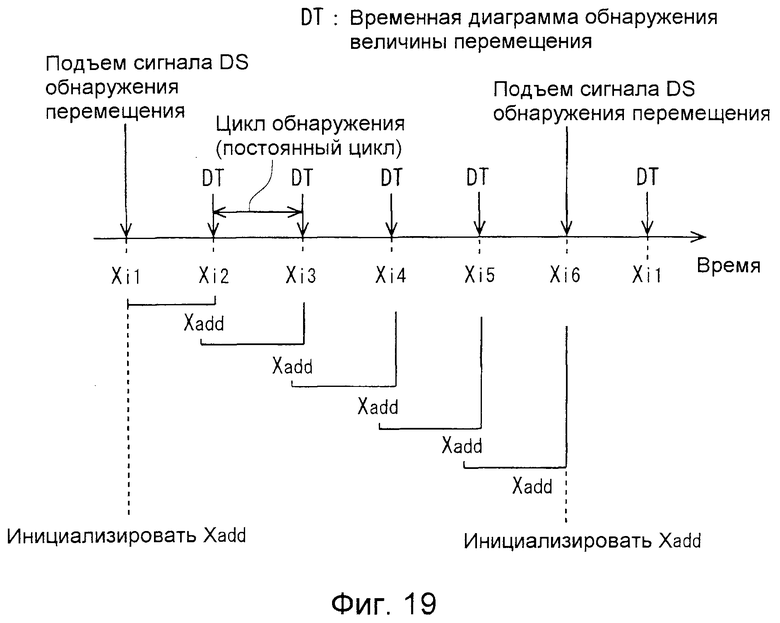
Фиг. 19 - другой пример способа определения, достигла ли величина перемещения позиции нажима пальца ширины строки.
Фиг. 20 - пример устройства считывания изображения в связанной области техники.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее примеры осуществления для выполнения изобретения поясняются подробно со ссылкой на чертежи.
На Фиг. 1A показан примерный вариант осуществления устройства считывания изображения согласно настоящему изобретению. Как показано на фигуре, это устройство 1 считывания изображения включает в себя корпус 2 сканера, блок 3 считывания, который смонтирован внутри корпуса 2 сканера и сконфигурирован с возможностью перемещения в направлении субсканирования путем приведения в движение двигателя, прозрачную стеклянную пластину 4, расположенную выше корпуса 2 сканера, и прозрачную воспринимающую касание панель 5, приклеенную на прозрачной стеклянной пластине 4. Следует отметить, что хотя иллюстрация опущена, направляющая(ие) скольжения установлена в корпусе 2 сканера. Кроме того, в блоке 3 считывания размещены (зубчатый) механизм(ы), который входит в зацепление с направляющей(ями) скольжения, и двигатель, который приводит в движение механизм(ы).
Как показано на Фиг. 1B, воспринимающая касание панель 5 сформирована в прямоугольной форме, как видно сверху, например, и используется в качестве панели размещения, на которую помещается палец 6, как показано на Фиг. 2. Как показано на Фиг. 1B, на воспринимающей касание панели 5 направление короткой стороны (направление основного сканирования) задано в качестве Y-координаты, и направление длинной стороны (направление субсканирования) задано в качестве X-координаты. Кроме того, позиция, в которую помещается палец 6, выводится в виде информации координат. Следует отметить, что имеются различные типы воспринимающих касание панелей, включающие в себя тип с резистивной пленкой, емкостной тип и оптический тип. Любая из этих воспринимающих касание панелей может использоваться в качестве воспринимающей касание панели 5.
Стеклянная пластина 4 действует в качестве опорной панели при помещении пальца 6 на воспринимающую касание панель 5 и состоит из прозрачного стекла, имеющего прочность выше, чем у воспринимающей касание панели 5.
Как показано на Фиг. 2, блок 3 считывания включает в себя источник 11 света, который облучает светом палец 6, помещенный на воспринимающую касание панель 5, CCD 12, который захватывает изображение, зеркало 13 и оптическую линзу 14, которые направляют изображение отпечатка пальца 6 на светоприемную поверхность CCD 12, и корпус 15 блока, который вмещает источник 11 света, CCD 12, зеркало 13 и оптическую линзу 14.
CCD 12 является одномерным CCD (линейным сенсором), который захватывает изображение «построчно», и размещен так, чтобы проходить в направлении основного сканирования, как показано на Фиг. 3. Следует отметить, что ширина LW (ширина строки) светоприемной поверхности CCD 12 больше ширины одного деления шкалы по X-координате воспринимающей касание панели 5.
На Фиг. 4 показана блок-схема функциональной конфигурации устройства 1 считывания изображения. Как показано на фигуре чертежа, устройство 1 считывания изображения включает в себя средство 21 обнаружения координат для обнаружения позиции пальца 6 на воспринимающей касание панели 5, средство 22 обнаружения перемещения для обнаружения величины перемещения пальца 6 на основании результата обнаружения средства 21 обнаружения координат и вывода сигнала DS обнаружения перемещения, источник 11 света, CCD 12, драйвер 23 CCD, который управляет CCD 12 путем подачи сигнала φTG вывода изображения и заставляет CCD 12 выводить сигнал изображения (аналоговый сигнал) IS с равномерными интервалами, блок 24 приема команд, который выдает инструкцию драйверу 23 CCD в соответствии с внешней командой считывания (инструкцией считывания) и включает источник 11 света, блок 25 обработки сигналов изображения, который выполняет заранее заданную обработку сигналов, такую как аналого-цифровое преобразование (A/D) для сигнала изображения IS, выводимого из CCD 12, средство 26 отбраковки изображений, чтобы отбраковывать данные изображения (цифровой сигнал) ID, выводимые из блока 25 обработки сигналов изображения, на действительные данные изображения и недействительные данные изображения на основании сигнала DS обнаружения перемещения средства 21 обнаружения координат, и сигнал φTG вывода изображения драйвера 23 CCD, память 27, которая сохраняет действительные данные изображения, выводимые из средства 26 отбраковки изображений, шаговый двигатель (в дальнейшем называемый "двигателем") 28, который перемещает блок 3 считывания (см. Фиг. 1A и 1B) в направлении субсканирования, средство 29 управления двигателем, чтобы управлять двигателем 28, и так далее. Следует отметить, что все из этих средств от средства 21 обнаружения координат до средства 29 управления двигателем размещены внутри блока 3 считывания, показанного на Фиг. 1A и 1B.
Как показано на Фиг. 5, средство 21 обнаружения координат включает в себя блок 31 обнаружения касания, который обнаруживает, помещен ли палец 6 на воспринимающую касание панель 5, в соответствии с выводом воспринимающей касание панели 5, и выводит сигнал TD обнаружения касания, и блок 32 генерирования данных X-координаты, который выполняет A/D преобразование сигнала X-координаты, выводимого из воспринимающей касание панели 5 (сигнал, указывающий область в направлении X-координаты области воспринимающей касание панели 5, на которой прижимается палец 6), и таким образом генерирует данные X-координаты XD.
Кроме того, средство 22 обнаружения перемещения включает в себя блок 41 обнаружения исходной позиции, блок 42 вычисления стартовой позиции, блок 43 обнаружения текущей позиции, блок 44 обнаружения величины перемещения и блок 45 обнаружения обратного.
Блок 41 обнаружения исходной позиции обнаруживает позицию, в которой палец 6 первоначально нажимает воспринимающую касание панель 5 (позицию, в которую человек-объект первоначально помещает свой палец 6), на основании сигнала TD обнаружения касания блока 31 обнаружения касания и данных XD-координаты блока 32 генерирования X-координаты, и выводит данные X0 исходной позиции, указывающие X-координату обнаруженной позиции.
Следует отметить, что как показано на Фиг. 6, область нажатия пальца 6 в направлении субсканирования (направление X-координаты) намного больше ширины одного деления шкалы X-координаты, воспринимающей касание панели 5. Следовательно, данные XD X-координаты, которые подаются от блока 32 генерирования данных X-координаты на блок 41 обнаружения исходной позиции, являются значением, соответствующим множеству делений шкалы от данных XD1 X-координаты на левом конце до данных XD2 X-координаты на правом конце. В блоке 41 обнаружения исходной позиции значение координат корректируется путем вычитания заранее заданной величины r в направлении, начиная от данных XD2 X-координаты в направлении внутренней стороны пальца 6, или суммирования заранее заданной величины r в направлении, начиная от данных XD1 X-координаты к внутренней стороне пальца 6. Затем это скорректированное значение задается в качестве "позиции нажима" пальца 6 и используется в качестве данных X0 исходной позиции.
Следует отметить, что вышеописанная функция коррекции не должна обязательно размещаться в блоке 41 обнаружения исходной позиции. То есть, функция коррекции может размещаться в блоке 32 генерирования данных X-координаты средства 21 обнаружения координат. Кроме того, когда информация координат сужается до одной точки заранее и выводится в качестве данных одной точки вследствие технических характеристик воспринимающей касание панели 5 (например, при выводе среднего значения между X-координатой на левом конце области нажатия и X-координатой на правом конце), вышеописанный процесс коррекции координат является ненужным.
Как показано на Фиг. 7, блок 42 вычисления стартовой позиции вычисляет величину M перемещения от начальной позиции блока 3 считывания до позиции старта считывания на основании данных X0 исходной позиции блока 41 обнаружения исходной позиции, и выводит значение MV начального движения, указывающее величину перемещения. В блоке 42 вычисления стартовой позиции информация о том, скольким делениям шкалы X-координаты воспринимающей касание панели 5, соответствует ширина LW строки CCD 12, сохраняется заранее.
Блок 43 обнаружения текущей позиции выводит данные Xi текущей позиции X-координаты, указывающие текущую позицию нажима пальца 6, на основании данных XD X-координаты блока 32 генерирования данных X-координаты. Подобно случаю блока 41 обнаружения исходной позиции, показанному на Фиг. 6, в блоке 43 обнаружения текущей позиции значение координаты корректируется путем вычитания заранее заданной величины r в направлении, начиная от данных XD1 или XD2 X-координаты, в направлении внутренней стороны пальца 6. Затем, это скорректированное значение задается в качестве "позиции нажима" пальца 6 и используется в качестве данных Xi X-координаты текущей позиции. Следует отметить, что циклом обнаружения данных Xi X-координаты текущей позиции является постоянный цикл, и установлен в цикл короче цикла VT вывода сигнала изображения CCD 12 (см. Фиг. 9).
Блок 44 обнаружения величины перемещения определяет, достигла ли величина перемещения позиции нажима пальца 6 ширины LW строки CCD 12 (см. Фиг. 3), на основании данных Xi X-координаты текущей позиции блока 43 обнаружения текущей позиции, и выводит сигнал DS обнаружения перемещения.
Как показано на Фиг. 8, блок 44 обнаружения величины перемещения сохраняет данные Xm X-координаты в момент, когда поднят описанный далее сигнал DS обнаружения перемещения, и вычисляет величину (Xi-Xm) перемещения пальца 6 путем вычитания сохраненных данных Xm X-координаты из имеющихся данных Xi X-координаты текущей позиции. Затем, блок 44 обнаружения величины перемещения определяет, достигла ли вычисленная величина (Xi-Xm) перемещения длины эквивалентной ширине LW строки CCD 12. Если достигла, то сигнал DS обнаружения перемещения поднимают до уровня Hi, как показано на Фиг. 9. Следует отметить, что в блоке 44 обнаружения величины перемещения информация о том, скольким делениям шкалы X-координаты воспринимающей касание панели 5 соответствует ширина LW строки CCD 12, также сохраняется заранее.
Кроме того, блок 44 обнаружения величины перемещения определяет направление перемещения пальца 6 (является ли оно прямым вращением или обратным вращением в направлении субсканирования) и выводит сигнал RD направления, указывающий направление перемещения. Этот сигнал RD направления становится сигналом уровня Hi (высокий), если направление перемещения пальца 6 является направлением прямого вращения, и становится сигналом уровня Low (низкий), если направление перемещения пальца 6 является направлением обратного вращения. Решение относительно направления перемещения пальца 6 может приниматься путем использования вышеописанной вычисленной величины (Xi-Xm) перемещения. При положительном значении величины (Xi-Xm) перемещения определяется, что направление перемещения является прямым вращением, тогда как при отрицательном значении определяется, что направление перемещения является обратным вращением.
Блок 45 обнаружения обратного обеспечивается, чтобы управлять операцией, выполняемой при изменении направления перемещения пальца 6 на обратное. Блок 45 обнаружения обратного контролирует значение L, указывающее величину обратного перемещения пальца 6 (значение, получаемое выражением величины перемещения в обратном направлении посредством числа строк), на основании сигнала RD направления и величины (Xi-Xm) перемещения блока 44 обнаружения величины перемещения и генерирует сигнал BS обратного возврата на основании этой величины L обратного перемещения.
Сигнал BS обратного возврата является сигналом, который указывает период, в который палец 6 движется в обратном направлении (обратный период), и период, в который палец 6 меняет направление на обратное снова из состояния движения в обратном направлении и возвращается к позиции обратного старта (позиции, в которой направление вращательного перемещения пальца 6 изменяется от прямого вращения к обратному вращению) (период возврата). Следовательно, как показано на Фиг. 9, сигнал BS обратного возврата находится на уровне Hi в период от момента, когда палец 6 начинает обратное действие от прямого вращения к обратному вращению, и до момента, когда палец 6 осуществил возврат к исходной позиции.
Снова со ссылкой на Фиг. 4, средство 26 отбраковки изображений включает в себя, как показано на Фиг. 10, блок 51 отбраковки, который принимает сигнал DS обнаружения перемещения и сигнал BS обратного возврата, подаваемый от средства 22 обнаружения перемещения, и сигнал φTG вывода изображения, подаваемый от драйвера 23 CCD, и выводит сигнал SS выбора изображения, и шлюзовой блок 52, который осуществляет отбраковку данных ID изображения на действительные данные изображения и недействительные данные изображения на основании сигнала SS выбора изображения блока 51 отбраковки.
Как показано на Фиг. 9, блок 51 отбраковки обращается к сигналу DS обнаружения перемещения и сигналу φTG вывода изображения в течение периода, в котором сигнал BS обратного возврата находится на уровне Low. Затем, блок 51 отбраковки повышает сигнал SS выбора изображения до уровня Hi в ответ на повышение сигнала φTG вывода изображения, которое происходит непосредственно после повышения сигнала DS обнаружения перемещения до уровня Hi, и удерживает повышенный сигнал SS выбора изображения в течение периода, эквивалентного одному циклу цикла VT вывода сигнала изображения CCD 12. Следует отметить, что период уровня Hi сигнала SS выбора изображения соответствует периоду, в течение которого данные ID изображения становятся действительным изображением(ями), и период уровня Low сигнала SS выбора изображения соответствует периоду, в течение которого данные ID изображения становятся недействительным изображением(ями).
Между тем, в течение периода, в который сигнал BS обратного возврата имеет уровень Hi, сигнал SS выбора изображения удерживается на уровне Low независимо от сигнала DS обнаружения перемещения и сигнала φTG вывода изображения.
Шлюзовой блок 52 выводит данные ID изображения, выводимые из блока 25 обработки сигналов изображения, в виде действительного изображения(ий) к последующей памяти 27 в течение периода, в который сигнал SS выбора изображения находится на уровне Hi. Кроме того, шлюзовой блок 52 рассматривает данные ID изображения в качестве недействительного изображения(й) и тем самым отбрасывает данные ID изображения в течение периода, в который сигнал SS выбора изображения находится на уровне Low. Следует отметить, что шлюзовой блок 52 может быть сформирован, например, логической схемой «И».
Снова со ссылкой на Фиг. 3, средство 29 управления двигателем включает в себя, как показано на Фиг. 11, привод 61 двигателя, который приводит в движение двигатель 28 в ответ на сигнал DS обнаружения перемещения, подаваемый от средства 22 обнаружения перемещения, и блок 62 управления стартовой позицией, который управляет перемещением CCD 12 (блока 3 считывания) к позиции старта считывания.
При повышении сигнала DS обнаружения перемещения блока 44 обнаружения величины перемещения до уровня Hi, привод 61 двигателя приводит в движение двигатель 28 и посредством этого перемещает CCD 12 (блок 3 считывания) на расстояние, эквивалентное ширине LW строки, в направлении субсканирования. Кроме того, если сигнал RD направления блока 44 обнаружения величины перемещения указывает прямое направление, привод 61 двигателя вращает двигатель 28 в прямом направлении (направление вращения для перемещения CCD 12 в прямом направлении), тогда как если сигнал RD направления указывает обратное направление, привод 61 двигателя вращает двигатель 28 в обратном направлении.
Блок 62 управления стартовой позицией используется, если CCD 12 перемещается из начальной позиции к позиции старта считывания (см. Фиг. 7). Блок 62 управления стартовой позицией сравнивает исходное значение MV движения, подаваемое от средства 22 обнаружения перемещения (см. Фиг. 5), с величиной движения двигателя (число строк, на которое CCD 12 переместился), и инструктирует привод 61 двигателя, так что двигатель 28 приводится в движение до тех пор, пока эти значения не станут равными друг другу.
Следует отметить, что вышеописанная конфигурация средств, поясненная со ссылкой на Фиг. 4-11, не должна обязательно создаваться полностью аппаратно. То есть, разумеется, что часть конфигурации может быть сконфигурирована программными средствами.
Затем поясняется работа устройства 1 считывания изображения, имеющего вышеописанную конфигурацию. Сначала ниже поясняется последовательность действий для операции считывания отпечатка пальца со ссылкой в основном на Фиг. 12-15.
Как показано на Фиг. 12A, при приеме внешней команды считывания, сначала величина обратного перемещения (число строк) L инициализируется как "L=0" в блоке 45 обнаружения обратного (см. Фиг. 5) (этап S1). Кроме того, в блоке 51 отбраковки (см. Фиг. 10) сигнал SS выбора изображения снижается до уровня Low, и посредством этого выполняется установка недействительности данных ID изображения (этап S2).
Затем, CCD 12 начинает приводиться в движение (этап S3), и ожидает, чтобы палец 6 был помещен на воспринимающую касание панель 5 (этап S4). Затем, если палец 6 помещен на воспринимающую касание панель 5 и блок 31 обнаружения касания (см. Фиг. 5) обнаруживает помещение пальца 6, блок 41 обнаружения исходной позиции отвечает на это обнаружение и генерирует данные X0 исходной позиции, указывающие исходную позицию пальца 6 (этап S5).
Затем, блок 42 вычисления стартовой позиции (см. Фиг. 5) вычисляет величину M перемещения блока 3 считывания от начальной позиции до позиции старта считывания (см. Фиг. 7), и блок 62 управления стартовой позицией (см. Фиг. 11) перемещает блок 3 считывания к позиции старта считывания (этап S6).
Следует отметить, что как показано на Фиг. 13A, например, в случае, где управление позицией блока 3 считывания выполняется путем использования центра блока 3 считывания в качестве опорной позиции P, хотя в зависимости от позиций компоновки зеркала 13 и оптической линзы 14, при перемещении блока 3 считывания из начальной позиции к позиции старта считывания, блок 3 считывания может быть позиционирован в такое состояние, что имеется расхождение между оптической осью 16 зеркала 13 и оптической линзой 14 и исходной позицией X0 пальца 6.
В случае, подобном показанному на Фиг. 13B, позиция блока 3 считывания, после перемещения блока 3 считывания к позиции старта считывания, может быть скорректирована путем перемещения блока 3 считывания в обратном направлении на малую величину, эквивалентную расхождению между оптической осью 16 и позицией X0 нажима. Альтернативно, после получения величины M перемещения, показанной на Фиг. 7, расхождение s можно вычесть из величины M перемещения (M-s) и исходное значение MV движения может быть определено на основании этого вычтенного значения (разности значений).
Однако при использовании конфигурации, в которой расхождение не происходит в первую очередь, например, когда опорная позиция P блока считывания устанавливается так, что совпадает с оптической осью 16, вышеописанный процесс коррекции является ненужным.
Вновь со ссылкой на Фиг. 12A, когда человек-объект начинает вращательное перемещение своего пальца 6 (этап S7), блок 43 обнаружения текущей позиции (см. Фиг. 5) генерирует данные Xi X-координаты текущей позиции, указывающие текущую позицию нажима пальца 6 (этап 8). Следует отметить, что как описано ранее, цикл обнаружения данных Xi X-координаты текущей позиции является постоянным циклом, и установлен в цикл короче цикла VT вывода сигнала изображения CCD 12 (цикл вывода сигнала IS изображения) (см. Фиг. 9).
Затем блок 44 обнаружения величины перемещения (см. Фиг. 5) вычисляет величину (Xi-Xm) перемещения пальца 6 и генерирует сигнал RD направления, указывающий направление перемещения пальца 6 (этап S9). Затем, определяется, является ли направление перемещения пальца 6 направлением прямого вращения (этап S10). Если им является прямое вращение (этап S10: Да), то определяется, достигла ли величина (Xi-Xm) перемещения пальца 6 ширины LW строки CCD 12 (см. Фиг. 3) (этап S11).
Затем, если величина (Xi-Xm) перемещения пальца 6 равна или больше ширины LW строки (при повышении сигнала DS обнаружения перемещения до уровня Hi) (этап S11: Да), то это указывает, что позиция нажима пальца 6 прошла расстояние, равное или большее ширины LW строки в направлении прямого вращения. Следовательно, привод 61 двигателя (см. Фиг. 11) приводит в движение двигатель 28 и посредством этого перемещает CCD 12 (блок 3 считывания) на расстояние, эквивалентное ширине LW строки в направлении прямого вращения (этап S12). В результате, как показано на Фиг. 15A, CCD 12 перемещается в прямом направлении на одну строку за один раз, заставляя при этом CCD 12 следовать за движением пальца 6.
Следует отметить, что на Фиг. 12A этап S13 выполняется после этапа S12. Однако пояснение этапа S13 опущено здесь ради удобства. Этап S13 будет пояснен далее.
Параллельно с процессом на этапе S12 блок 51 отбраковки повышает сигнал SS выбора изображения до уровня Hi и данные ID изображения, выводимые из блока 25 обработки сигналов изображения, посредством этого делаются действительными (этап S14). Как описано ранее, повышение сигнала SS выбора изображения выполняется в ответ на повышение сигнала φTG вывода изображения, которое происходит непосредственно после повышения сигнала DS обнаружения перемещения до уровня Hi. Кроме того, период уровня Hi сигнала SS выбора изображения выдерживается в течение периода, эквивалентного одному циклу цикла VT вывода сигнала изображения CCD 12 (см. Фиг. 9). В результате данные ID изображения, соответствующие одной строке, делаются действительными, и действительные данные ID изображения выводятся в память 27 через шлюзовой блок 52 (см. Фиг. 10).
С другой стороны, если величина (Xi-Xm) перемещения пальца 6 меньше ширины LW строки (когда сигнал DS обнаружения перемещения не был повышен до уровня Hi) (этап S11: Нет), состояние, где данные ID изображения являются недействительными (состояние, где сигнал SS выбора изображения находится на уровне Low) поддерживается в блоке 51 отбраковки (этап S15).
В отличие от этих состояний, когда направление движения пальца 6 является направлением обратного вращения (этап S10: Нет), как показано на Фиг. 12C, состояние, где данные ID изображения являются недействительными, поддерживается в блоке 51 отбраковки (этап S16), и определяется, является ли абсолютное значение величины (Xi-Xm) перемещения пальца 6 равным или большим ширины LW строки (этап S17).
Если абсолютное значение величины (Xi-Xm) перемещения пальца 6 меньше ширины LW строки (этап S17: Нет), процедура переходит на этап S8. Затем в ответ на наступление следующего момента синхронизации обнаружения данных Xi X-координаты текущей позиции, выполняются процессы на этапе S8 и последующих этапах.
С другой стороны, если абсолютное значение величины (Xi-Xm) перемещения пальца 6 равно или больше ширины LW строки (этап S17: Да), это указывает, что позиция нажима пальца 6 прошла расстояние, равное или большее ширины LW строки в направлении обратного вращения. Следовательно, блок 45 обнаружения обратного добавляет одну строку к величине L обратного перемещения (этап S18). Кроме того, двигатель 28 вращается в обратном направлении, и CCD 12 посредством этого перемещается на расстояние, эквивалентное ширине LW строки, в направлении обратного вращения (этап S19).
После этого, в ответ на наступление следующего момента синхронизации обнаружения данных Xi X-координаты текущей позиции выполняется процесс на этапе S8. Затем, на этапе S10 определяется, является ли направление перемещения пальца 6 направлением прямого вращения. На этой стадии, если палец 6 все еще перемещается в обратном направлении (этап S10: Нет), процедура переходит к процессу на этапе S16 снова, и повторяются процессы на этапах S16-S19. Следовательно, всякий раз, когда абсолютное значение величины (Xi-Xm) перемещения становится равным или большим ширины LW строки, значение "1" кумулятивно суммируется с величиной L обратного перемещения, и CCD 12 перемещается в обратном направлении на одну строку за один раз, чтобы следовать за перемещением пальца 6, как показано на Фиг. 15B.
С другой стороны, при изменении направления перемещения пальца 6 на прямое направление вращения в ходе процесса на этапе S10 (этап S10: Да), процедура переходит к процессу на этапе S11, и определяется, является ли величина (Xi-Xm) перемещения пальца 6 равной или большей ширины LW строки. Затем, если величина перемещения пальца 6 для направления прямого вращения (величина перемещения по отношению к направлению для возврата к позиции обратного старта) равна или больше ширины LW строки (этап S11: Да), двигатель 28 вращается в прямом направлении, и CCD 12 возвращается в направлении прямого вращения на расстояние, эквивалентное одной строке (этап S12).
Затем определяется, является ли "0" величина L обратного перемещения блока 45 обнаружения обратного (этап S13). Этот процесс выполняется, чтобы проверить, возвратился ли CCD 12 к позиции обратного старта пальца 6. Если величина L обратного перемещения не является "0" (этап S13: Нет), то есть, если CCD 12 не возвратился к позиции обратного старта, значение "1" вычитается из величины L обратного перемещения, сохраняемой в блоке 45 обнаружения обратного (этап S21), поддерживая при этом недействительность данных ID изображения (этап S20). Следует отметить, что вычитание "1" из величины L обратного перемещения соответствует процессу, в котором CCD 12 возвратился в направлении прямого вращения на расстояние, эквивалентное одной строке, на этапе S12.
После этого вышеописанные процессы повторяются до тех пор, пока величина L обратного перемещения не станет "0". Как показано на Фиг. 15C, CCD 12 перемещают в направлении прямого вращения на одну строку за один раз, заставляя при этом CCD 12 следовать за перемещением пальца 6, который возвращается к позиции обратного старта. Затем, если величина L обратного перемещения является "0", то есть, при возврате CCD 12 к позиции обратного старта пальца 6 (этап S13: Да), процедура переходит к процессу на этапе S14. Затем, подобно вышеописанным процессам, CCD 12 периодически перемещается на одну строку за один раз в прямом направлении, делая при этом данные ID изображения действительными, как надлежит.
После этого, как показано на Фиг. 12B, пока палец 6 не отделится от воспринимающей касание панели 5 или число полученных строк данных ID изображения не достигнет номера строки обозначения действительного изображения (этапы S22 и S23), процессы на этапах S8-S20 повторяются, и круговое изображение отпечатка пальца от одной стороны до другой стороны пальца 6, посредством этого получается «построчно». Следует отметить, что номером строки обозначения действительного изображения является значение, которое задается заранее путем оценки обычного размера изображений круговых отпечатков пальцев всех людей и является значением, полученным выражением оцениваемого размера изображений круговых отпечатков пальцев посредством числа строк CCD 12.
Затем, когда палец 6 отделяется от воспринимающей касание панели 5, или число полученных строк данных ID изображения достигло номера строки обозначения действительного изображения (этап S22: Да, или этап S23: Да), операция считывания завершается. Следовательно, как показано на Фиг. 14, CCD 12 возвращается к начальной позиции, и приведение в движение CCD 12 останавливается (этапы S24 и S25).
Затем, поясняется пример операции устройства 1 считывания изображения, выполняемой в соответствии с процедурой, показанной на Фиг. 12-15. В этом примере, сначала случай, где пальцем 6, помещенным на воспринимающую касание панель 5, осуществляют вращательное перемещение только в направлении прямого вращения, поясняется со ссылкой в основном на Фиг. 16. Следует отметить, что хотя на Фиг. 16 не иллюстрируется, сигнал BS обратного возврата удерживается на уровне Low.
В начале, при низкой скорости вращательного перемещения пальца 6 после подъема сигнала DS обнаружения перемещения в момент t1 синхронизации, состояние, где сигнал DS обнаружения перемещения остается на уровне Low, продолжается в течение некоторого времени. В этом случае, сначала повышается сигнал SS выбора изображения в ответ на повышение сигнала φTG вывода изображения (момент t2 синхронизации), что происходит непосредственно после повышения сигнала DS обнаружения перемещения. Следовательно, данные ID(A) изображения делаются действительными. Кроме того, в ответ на повышение сигнала DS обнаружения перемещения (момент t1 синхронизации), сигнал приведения в движение двигателя повышается и CCD 12 посредством этого перемещается на расстояние, эквивалентное одной строке, в направлении прямого вращения.
Затем, когда истек цикл VT вывода сигнала изображения CCD 12 (то есть, в ответ на следующее повышение сигнала φTG вывода изображения), сигнал SS выбора изображения спадает и состояние изменяется так, что данные ID изображения делаются недействительным (момент t3 синхронизации). После этого недействительность данных ID изображения продолжается до следующего повышения сигнала SS выбора изображения (момент t5 синхронизации), так что отбрасываются данные изображения и ID(B) и ID(C), которые выводятся в течение того периода.
В момент t4 синхронизации, когда сигнал DS обнаружения перемещения повышается второй раз, данные ID (D) изображения делаются действительными, и двигатель приводится в движение, как в случае вышеописанных процессов. На этой стадии, если скорость вращательного перемещения пальца 6 изменилась и стала выше, сигнал DS обнаружения перемещения повышается с более короткими интервалами после момента t4 синхронизации. В ответ на это, частота, с которой данные ID изображения делаются действительными, возрастает. Следовательно, данные ID (E) изображения, которые являются следующими данными данных ID (D) изображения, также делаются действительными.
После этого данные ID изображения отбраковываются на действительные данные или недействительные данные согласно степени продвижения пальца 6 (моменты t6 - t11 синхронизации). Кроме того, CCD 12 периодически перемещается в прямом направлении, как надлежит, и операция считывания, посредством этого продвигается. Затем, когда операция считывания была закончена, одно изображение отпечатка пальца получают соединением действительных данных изображения (данные изображения, хранимые в памяти 27) ID(A), ID(D), ID(E), ID(G)-ID(I), ID(K)-ID(M), и ID(O) вместе. Следует отметить, что операция соединения данных ID изображения не требует какого-либо сложного процесса редактирования данных, такого как, так называемая обработка синтеза изображений. Таким образом, операция соединения может выполняться только считыванием данных ID изображения, записанных в памяти 27 согласно очередности записи данных ID изображения.
Как описано выше, этот примерный вариант осуществления сконфигурирован таким образом, что обнаруживается величина перемещения позиции нажима пальца 6, и CCD 12 перемещается так, чтобы следовать за вращательным перемещением пальца 6, тогда как заставляя CCD 12 выводить сигнал IS изображения для каждой строки с равномерными интервалами. Кроме того, каждый раз, когда величина перемещения позиции нажима пальца 6 достигает ширины LW строки, данные ID изображения селективно делаются действительными. В результате является возможным получать изображение отпечатка пальца «построчно» упорядоченным способом, предотвращая перекрытия между изображениями отпечатков пальцев (перекрытия между изображениями). Кроме того, полное изображение кругового отпечатка пальцев генерируется соединением вместе множества строка за строкой данных ID изображения, которые получены вышеописанным образом. В результате менее вероятно, что возникнут искажения в стыковке между изображениями по сравнению со случаем, где объединяются изображения кадра (изображения области). Следовательно, возможно получать отличное изображение без искажения или с небольшим, без использования какой-либо обработки коррекции искажения, подобной используемой в традиционном способе.
Затем, случай изменения на обратное направления вращательного перемещения пальца 6, помещенного на воспринимающую касание панель 5, поясняется со ссылкой главным образом на Фиг. 17.
В моменты t21-t24 синхронизации, в которые пальцем 6 осуществляют вращательное перемещение в прямом направлении, сигнал RD направления повышается до Hi уровня. Следовательно, устройство работает образом, подобным таковому в моменты t1-t3 синхронизации, показанные на Фиг. 16.
Затем, в момент t24 синхронизации, когда направление вращательного перемещения пальца 6 изменяется на обратное и позиция нажима пальца 6 начинает перемещаться в обратном направлении, сигнал BS обратного возврата поднимается до уровня Hi. Сигнал BS обратного возврата удерживается на уровне Hi до момента t30 синхронизации, в котором палец 6, будучи обращенным снова, возвратился к позиции обратного старта (позиция, в которой направление вращательного перемещения пальца 6 изменяется от прямого вращения к обратному вращению). Следовательно, все данные изображения от ID(C) до ID(H), которые выводятся в течение периода от момента t24 до t30 синхронизации, делаются недействительными и в силу этого - отброшенными.
Кроме того, в момент t25 синхронизации, когда величина перемещения пальца 6 по отношению к обратному направлению достигла ширины LW строки, повышается сигнал приведения в движение двигателя (момент t26 синхронизации) и двигатель 28 в силу этого вращается в обратном направлении. Следовательно, CCD 12 перемещается в обратном направлении.
После этого, в момент t27 синхронизации, когда направление вращательного перемещения пальца 6 вновь изменяется на обратное и позиция нажима пальца 6 начинает перемещаться в прямом направлении, сигнал RD направления повышается до уровня Hi. Затем, в момент t28 синхронизации, когда величина перемещения пальца 6 по отношению к прямому направлению достигла ширины LW строки, повышается сигнал приведения в движение двигателя (момент t29 синхронизации) и двигатель 28 посредством этого вращается в прямом направлении. Следовательно, CCD 12 перемещается в прямом направлении.
После этого в момент t30 синхронизации, в который палец 6 возвратился к позиции обратного старта, данные ID изображения отбраковываются на действительные данные или недействительные данные согласно степени продвижения пальца 6 как в случае, показанном на Фиг. 16. Кроме того, CCD 12 перемещается в прямом направлении как надлежит, и операция считывания тем самым продвигается.
Как описано выше, этот примерный вариант осуществления сконфигурирован таким образом, что обнаруживаются момент синхронизации, в который направление вращательного перемещения пальца 6 изменяется на обратное, и момент синхронизации, в который палец 6 снова изменяет направление на обратное и возвращается к позиции обратного старта, и все данные ID изображения делаются недействительными в течение этого периода. Следовательно, является возможным отбросить, как соответствует, данные ID изображения, которые получены в течение периода, в который человек-объект не осуществлял вращательного перемещения своим пальцем 6 надлежащим образом. Следовательно, данные ID изображения, которые получены в течение этого периода, не примешиваются в данные ID составного изображения, и посредством этого позволяют препятствовать нарушению составного изображения. В результате, даже если человек-объект изменяет направление вращательного перемещения своего пальца 6 на полпути операции считывания, человека-объекта не вынуждают выполнять операцию считывания снова, и посредством этого возможно повысить удобство в использовании.
Как описано выше, этот примерный вариант осуществления сконфигурирован таким образом, что CCD 12, имеющий одномерную конфигурацию (линейный сенсор), перемещается так, чтобы следовать за вращательным перемещением пальца 6, в ходе считывания посредством CCD 12 изображения отпечатка пальца «построчно». Кроме того, поскольку принята конфигурация сканера отслеживающего типа для блока считывания, генерирующего сигнал изображения для изображения отпечатка пальца, не является необходимым оснащать устройство конструктивно большой цифровой камерой, и посредством этого возможно уменьшить габаритный размер устройства.
Кроме того, как описано выше, оно сконфигурировано таким образом, что при каждом достижении величиной перемещения позиции нажима пальца 6 ширины LW строки, данные ID изображения селективно делаются действительными. Следовательно, является возможным получать отличное изображение без искажения или с небольшим искажением без использования обработки коррекции искажения, подобной используемой в традиционном способе. В результате является возможным решить вопрос сложности схемы и программного обеспечения для обработки сигналов и посредством этого снизить стоимость устройства.
Хотя на данный момент поясняются иллюстративные варианты осуществления согласно настоящему изобретению, настоящее изобретение не ограничивается вышеописанными конфигурациями. То есть, могут выполняться различные модификации в примерах осуществления в рамках объема настоящего изобретения, определенного в пунктах формулы изобретения.
Например, хотя примеры, где устройство считывания изображения согласно настоящему изобретению используется, чтобы считывать отпечаток пальца, пояснены в вышеописанных примерных вариантах осуществления, объект, который должен быть считан, (предмет), не ограничивается пальцами, а включает в себя любой объект, который можно вращательно перемещать на воспринимающей касание панели 5. То есть, настоящее изобретение может быть широко применимым к любым объектам, которые могут вращательно перемещаться на воспринимающей касание панели 5 и изображения поверхности которых могут посредством этого считываться. Например, настоящее изобретение может применяться для исследований поверхности или подобного для упакованных в банки напитков и/или консервов. Следует отметить, что предпочтительно объекты имеют цилиндрическую форму. Однако любые предметы, которые можно вращательно перемещать на воспринимающей касание панели 5, могут становиться объектом, не вызывая какой-либо проблемы даже при несколько искаженной своей форме.
Кроме того, вышеописанные примеры осуществления сконфигурированы так, что при изменении направления вращательного перемещения пальца 6 на обратное, CCD 12 перемещают так, чтобы следовать его перемещению (см. Фиг. 15B). Однако, как показано на Фиг. 18A, 18B и 18C, их также можно сконфигурировать таким образом, что: даже если пальцем 6 осуществляют вращательное перемещение в обратном направлении, CCD 12 останавливается в позиции обратного старта пальца 6, не будучи перемещаемым в обратном направлении; и после этого CCD 12 ожидает в ней до тех пор, пока палец 6 не изменит направление на обратное снова и не возвратится к позиции обратного старта. Следует отметить, что после возвращения пальца 6 к позиции обратного старта CCD 12 перемещают в прямом направлении, чтобы следовать за перемещением позиции нажима пальца 6, как в показанном на Фиг. 16 случае.
Кроме того, вышеописанные примерные варианты осуществления сконфигурированы таким образом, что: при определении, достигла ли величина перемещения позиции нажима пальца 6 ширины LW строки, данные Xm X-координаты в момент повышения сигнала DS обнаружения перемещения сохраняются; эти данные вычитают из данных Xi X-координаты текущей позиции; и посредством этого получают величину (Xi-Xm) перемещения; и определяют, является ли полученная величина (Xi-Xm) перемещения равной или большей ширины LW строки. Однако, как показано на Фиг. 19, их можно сконфигурировать таким образом, что: величину Xadd перемещения получают кумулятивно сложением данных X-координаты для каждого цикла обнаружения DT, то есть, кумулятивным суммированием данных Xi1-Xi6 X-координаты; и определяют, является величина перемещения Xadd равной или большей длины, эквивалентной ширине LW строки. В этом случае величину перемещения Xadd инициализируют в "0" при каждом повышении сигнала DS обнаружения перемещения.
Кроме того, вышеописанные примерные варианты осуществления сконфигурированы таким образом, что при идентификации позиции нажима пальца 6, позицию нажима идентифицируют просто сложением/вычитанием заранее заданной величины r (см. Фиг. 6). Однако, например, их можно сконфигурировать таким образом, что: арифметическая обработка “XD1+{(XD2-XD1)/2}” или “XD2-{(XD2-XD1)/2}” может выполняться в блоке 41 обнаружения исходной позиции/или блоке 43 обнаружения текущей позиции; и координату центра между данными XD1 X-координаты и данными XD2 X-координаты можно всегда получить, и это значение может быть идентифицировано в качестве позиции нажима.
Кроме того, хотя в вышеописанных примерах осуществления CCD используется в качестве примера линейного сенсора, который выводит сигнал IS изображения, устройству не требуется обязательно использовать CCD. Например, могут использоваться другие устройства захвата изображения, такие как датчик на комплементарной структуре «металл-оксид-полупроводник» (КМОП, CMOS).
Как описано выше, устройство считывания изображения может включать в себя средство отбраковки изображений, чтобы селективно делать действительным сигнал изображения, выводимый из линейного сенсора, на основании величины перемещения, обнаруженной средством обнаружения, и запоминающее средство, чтобы сохранять сигнал изображения, который делается действительным средством отбраковки изображений.
Как описано выше, в устройстве считывания изображения средство обнаружения может включать в себя блок обнаружения величины перемещения, который обращается к информации координат, выводимой из воспринимающей касание панели с равномерными интервалами, и обнаруживает, что величина перемещения позиции нажима объекта по отношению к направлению субсканирования достигла ширины строки линейного сенсора, и средство отбраковки изображений может делать действительным сигнал изображения, выводимый из линейного сенсора, при достижении величиной перемещения позиции нажима объекта по отношению к направлению субсканирования ширины строки линейного сенсора.
С помощью вышеописанной конфигурации является возможным получать изображение отпечатка пальца построчно упорядоченным образом с предотвращением при этом перекрытий между изображениями. Кроме того, путем генерирования полного изображения путем объединения множества построчных сигналов изображения, полученных таким образом, менее вероятно появление искажений в стыковке между изображениями по сравнению со случаем, где объединяются изображения кадра (изображения области). Следовательно, является возможным получать отличное изображение без искажения или с небольшим искажением без использования обработки коррекции искажения, подобной таковой, используемой в традиционном способе.
Как описано выше, в устройстве считывания изображения, средство передвижения датчика может включать в себя двигатель, который передвигает линейный сенсор в направлении субсканирования, и привод двигателя, который приводит в движение двигатель на основании результата обнаружения блока обнаружения величины перемещения, и посредством этого построчно передвигает линейный сенсор.
С помощью вышеописанной конфигурации является возможным перемещать линейный сенсор построчно в соответствии с вращательным перемещением объекта и посредством этого соответственно изменять позицию линейного сенсора, чтобы следовать за вращательным перемещением объекта.
Как описано выше, в устройстве считывания изображения, средство обнаружения может включать в себя блок обнаружения направления перемещения, который обнаруживает направление вращательного перемещения объекта на основании информации координат, выводимой из воспринимающей касание панели, и блок обнаружения обратного, который обнаруживает обратный период, в который направление вращательного перемещения объекта изменилось на обратное, и период возврата, в который объект изменяет направление на обратное снова после того и возвращается к исходной позиции, на основании направления вращательного перемещения, обнаруженного блоком обнаружения направления перемещения и информации координат, выводимой из воспринимающей касание панели, и средство отбраковки изображений может делать недействительным весь сигнал изображения, выводимый из линейного сенсора, в период, в который блок обнаружения обратного обнаруживает обратный период или период возврата, и селективно делает действительным сигнал изображения, выводимый из линейного сенсора, на основании величины перемещения, обнаруженной средством обнаружения в период, в который блок обнаружения обратного не обнаруживает ни обратный период, ни период возврата.
С помощью вышеописанной конфигурации детектируют обратный период, в который направление вращательного перемещения объекта изменяется на обратное, и период возврата, в который объект изменяет направление на обратное снова после этого и возвращается к исходной позиции, и сигналы изображения делают недействительными в эти периоды. В результате является возможным отбросить, как надлежит, сигналы изображения, которые генерируются в период, в который объект не осуществляет вращательного перемещения надлежащим образом, и посредством этого препятствовать нарушению составного изображение.
Как описано выше, в устройстве считывания изображения, линейный сенсор может выводить сигнал изображения с равномерными интервалами, и средство отбраковки изображений, может селективно делать сигнал изображения, выводимый из линейного сенсора с равномерными интервалами, действительным в синхронизации с циклом вывода сигнала изображения линейного сенсора на основании величины перемещения, обнаруженной средством обнаружения.
С помощью вышеописанной конфигурации осуществляется такая конфигурация, что линейный сенсор непрерывно приводится в движение в постоянном цикле, и необходимый сигнал(ы) изображения извлекается, как надлежит, из его выходных сигналов изображения. Следовательно, не требуется управлять синхронизацией движения линейного сенсора сложным способом (например, осуществлять мониторинг величины перемещения объекта и управлять линейным датчиком только при необходимости), и таким образом давать возможность препятствовать усложнению управляющей последовательности. Кроме того, поскольку действительность/недействительность сигналов изображения может переключаться в соответствии с временной диаграммой вывода сигналов линейного сенсора, является возможным получать надлежащий сигнал(ы) изображения, когда сигналы изображения являются действительными.
Как описано выше, в устройстве считывания изображения, объект может быть пальцем, и изображение поверхности может быть круговым изображением отпечатка пальца от одной стороны до другой стороны пальца.
Эта заявка основывается на и испрашивает преимущество приоритета заявки на патент Японии № 2010-216406, поданной 28 сентября 2010, раскрытие которой полностью включено в документ путем ссылки.
Промышленная применимость
Настоящее изобретение может использоваться для систем, которые сравнивают отпечатки пальцев.
Перечень ссылочных обозначений
1 Устройство считывания изображения
2 Корпус сканера
3 Блок считывания
4 Стеклянная пластина
5 Воспринимающая касание панель
6 Палец
11 Источник света
12 CCD (ПЗС-детектор)
13 Зеркало
14 Оптические линзы
15 Корпус блока
21 Средство обнаружения координат
22 Средство обнаружения перемещения
23 Драйвер CCD
24 Блок приема команд
25 Блок обработки сигнала изображения
26 Средство отбраковки изображений
27 Память
28 Двигатель
29 Средство управления двигателем
31 Блок обнаружения касания
32 Блок генерирования данных X-координаты
41 Блок обнаружения исходной позиции
42 Блок вычисления стартовой позиции
43 Блок обнаружения текущей позиции
44 Блок обнаружения величины перемещения
45 Блок обнаружения обратного
51 Блок отбраковки
52 Шлюзовой блок
61 Привод двигателя
62 Блок управления стартовой позицией
TD Сигнал обнаружения касания
XD Данные X-координаты
RD Сигнал направления
DS Сигнал обнаружения перемещения
BS Сигнал обратного возврата
SS Сигнал выбора изображения
φTG Сигнал вывода изображения
IS Сигнал изображения
ID Данные изображения
MV Начальное значение движения





Изобретение относится к устройствам считывания изображений. Технический результат - получение четких изображений без искажений. Устройство считывания изображения, которое считывает изображение поверхности объекта при вращательном перемещении объекта в направлении субсканирования, содержит воспринимающую касание панель, которая выводит позицию нажима, нажатую объектом, в виде информации координат в направлении субсканирования, причем объект помещен на поверхность воспринимающей касание панели; линейный сенсор, который захватывает изображение объекта, помещенного на воспринимающую касание панель, с задней стороны, воспринимающей касание панели в направлении основного сканирования и выводит сигнал изображения; средство обнаружения, чтобы обнаруживать величину перемещения позиции нажима объекта по отношению к направлению субсканирования на воспринимающей касание панели на основании информации координат, выводимой из воспринимающей касание панели; и средство передвижения сенсора, чтобы перемещать линейный сенсор в направлении субсканирования с тем, чтобы следовать за вращательным перемещением объекта, на основании величины перемещения, обнаруженной средством обнаружения. 2 н. и 6 з.п. ф-лы, 20 ил.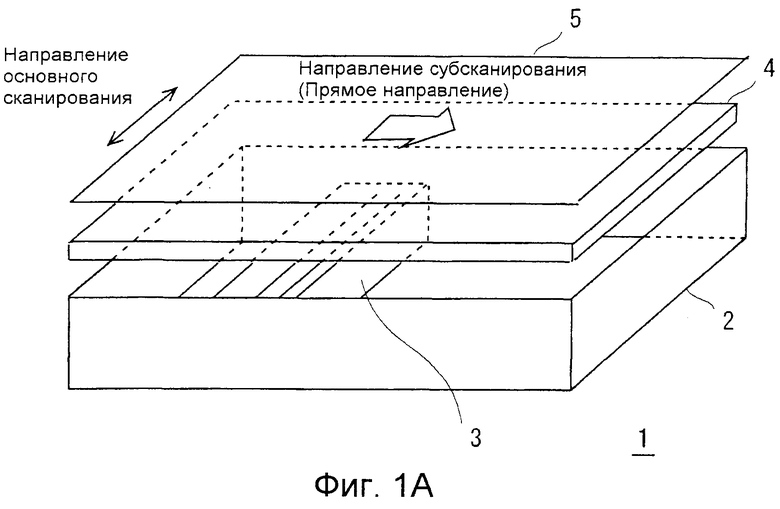
1. Устройство считывания изображения, которое считывает изображение поверхности объекта при вращательном перемещении объекта в направлении субсканирования, содержащее:
воспринимающую касание панель, которая выводит позицию нажима, нажатую объектом, в виде информации координат в направлении субсканирования, причем объект помещен на поверхность воспринимающей касание панели;
линейный сенсор, который захватывает изображение объекта, помещенного на воспринимающую касание панель, с задней стороны воспринимающей касание панели в направлении основного сканирования и выводит сигнал изображения;
средство обнаружения, чтобы обнаруживать величину перемещения позиции нажима объекта по отношению к направлению субсканирования на воспринимающей касание панели на основании информации координат, выводимой из воспринимающей касание панели; и
средство передвижения сенсора, чтобы перемещать линейный сенсор в направлении субсканирования с тем, чтобы следовать за вращательным перемещением объекта на основании величины перемещения, обнаруженной средством обнаружения.
2. Устройство считывания изображения по п.1, дополнительно содержащее:
средство отбраковки изображений, чтобы селективно делать действительным сигнал изображения, выводимый из линейного сенсора, на основании величины перемещения, обнаруженной средством обнаружения; и
запоминающее средство, чтобы сохранять сигнал изображения, который делается действительным посредством средства отбраковки изображений.
3. Устройство считывания изображения по п.2, в котором
средство обнаружения содержит блок обнаружения величины перемещения, который обращается к информации координат, выводимой из воспринимающей касание панели, с регулярным интервалом, и обнаруживает, что величина перемещения позиции нажима объекта по отношению к направлению субсканирования достигла ширины строки линейного сенсора, и
средство отбраковки изображений делает действительным сигнал изображения, выводимый из линейного сенсора, если величина перемещения позиции нажима объекта по отношению к направлению субсканирования достигла ширины строки линейного сенсора.
4. Устройство считывания изображения по п.3, в котором средство передвижения датчика содержит:
двигатель, который передвигает линейный сенсор в направлении субсканирования; и
привод двигателя, который приводит в движение двигатель на основании результата обнаружения блока обнаружения величины перемещения и посредством этого передвигает линейный сенсор построчным образом.
5. Устройство считывания изображения по п.2, в котором
средство обнаружения содержит: блок обнаружения направления перемещения, который обнаруживает направление вращательного перемещения объекта на основании информации координат, выводимой из воспринимающей касание панели; и блок обнаружения обратного, который обнаруживает обратный период, в который направление вращательного перемещения объекта изменилось на обратное, и период возврата, в который объект снова изменяет направление на обратное после этого и возвращается к исходной позиции на основании направления вращательного перемещения, обнаруженного блоком обнаружения направления перемещения и информации координат, выводимой из воспринимающей касание панели, и
средство отбраковки изображений делает недействительным весь сигнал изображения, выводимый из линейного сенсора, в период, в который блок обнаружения обратного обнаруживает обратный период или период возврата и селективно делает действительным сигнал изображения, выводимый из линейного сенсора, на основании величины перемещения, обнаруженной средством обнаружения в период, в который блок обнаружения обратного не обнаруживает ни обратного периода, ни периода возврата.
6. Устройство считывания изображения по п.2, в котором
линейный сенсор выводит сигнал изображения с регулярным интервалом, и
средство отбраковки изображений селективно делает действительным сигнал изображения, выводимый из линейного сенсора с регулярным интервалом, в синхронизации с циклом вывода сигнала изображения линейного сенсора на основании величины перемещения, обнаруженной средством обнаружения.
7. Устройство считывания изображения по п.1, в котором объектом является палец, и изображением поверхности является изображение кругового отпечатка пальца от одного бока пальца до другого бока пальца.
8. Способ считывания изображения для считывания изображения поверхности объекта при вращательном перемещении объекта в направлении субсканирования, содержащий:
вывод позиции нажима, нажатой объектом, в виде информации координат в направлении субсканирования;
обнаружение величины перемещения позиции нажима объекта по отношению к направлению субсканирования на основании информации координат; и
перемещение линейного сенсора в направлении субсканирования, чтобы следовать за вращательным перемещением объекта на основании величины перемещения.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ОТПЕЧАТКОВ ПАЛЬЦЕВ (СКАНЕР) | 2007 |
|
RU2364935C2 |

