Предлагаемое изобретение относится к устройствам, специально приспособленным для фотомеханического изготовления поверхностей с рисунком, и может найти применение в фотолитографии при производстве печатных плат.
Известно устройство лазерного рисования с точной коррекцией масштабирования [Laser drawing apparatus with precision scaling-correction, US 5980088 А, опубл. 09.11.1999], реализующее с помощью сканирующей системы прямое лазерное экспонирование пучком лазерного излучения, который промодулирован сигналом, основанным на растровых данных наносимого изображения.
Устройство лазерного рисования с точной коррекцией масштабирования содержит направляющие с линейным двигателем, подвижный столик, θ-столик, рамку для размещения заготовки, четыре подстроенных механизма, зажимы, источник лазерного излучения, пятнадцать плоских зеркал, разветвитель пучка, два делителя пучка, два электронных затвора, поляризационный оптический компоновщик, полигональное зеркало, fθ-линзу, направляющее зеркало, линзу-конденсор, две CCD-камеры, панель для размещения оптических элементов, основание, на котором закреплены направляющие, CCD-камеры, направляющее зеркало, линзу-конденсор, источник лазерного излучения и панель для размещения оптических элементов, к которой прикреплены пятнадцать плоских зеркал, разветвитель пучка, два электронных затвора, два делителя пучка, поляризационный оптический компоновщик, полигональное зеркало и fθ-линза, причем источник лазерного излучения, семь плоских зеркал, разветвитель пучка и два делителя пучка расположены так, чтобы излучаемый источником лазерный пучок, последовательно отразившись от двух зеркал, попадал на разветвитель и разделялся на два перпендикулярных пучка, каждый из которых, отразившись от отдельной группы - один из двух, другой из трех зеркал, попадал в предназначенный для него расщепитель, где разделялся на восемь параллельных пучков лазерного излучения, пять других плоских зеркал, два электронных затвора и поляризационный оптический компоновщик размещены относительно друг друга таким образом, что упомянутые две группы из восьми параллельных пучков излучения, последовательно отразившись каждая от своей пары плоских зеркал, проходят через отдельные электронные затворы и попадают в поляризационный оптический компоновщик, одна попадает непосредственно из электронного затвора, в то время как другая, отразившись от плоского зеркала, а поляризационный оптический компоновщик, три иных плоских зеркала, полигональное зеркало, fθ-линза, направляющее зеркало, линза-конденсор и рамка для размещения заготовки взаимно расположены в конфигурации, при которой во время вращения полигонального зеркала выходящая из поляризационного оптического компоновщика группа из шестнадцати параллельных пучков лазерного излучения, последовательно отразившись от каждого из трех упомянутых плоских зеркал, отражалась от движущихся граней полигонального зеркала, проходила через fθ-линзу, отражалась от направляющего зеркала, проходила через линзу-конденсор и производила сканирование поверхности рамки для размещения заготовки, при этом подвижный столик установлен на направляющих и соединен с подвижной частью линейного двигателя так, что может перемещаться вдоль них, θ-столик закреплен на подвижном столике способом, позволяющим ему вращаться вокруг оси, перпендикулярной его верхней поверхности и проходящей через ее центр, рамка для размещения заготовки зафиксирована на θ-столике с помощью четырех подстроечных механизмов, расположенных по ее краям с двух противоположных сторон по два, а зажимы прикреплены к поверхности рамки.
Устройство позволяет наносить рисунок на поверхность заготовки с помощью источника лазерного излучения и сканирующей системы следующим образом. Экспонируемый материал, закрепленный на специальном столике в рамке, перемещается с постоянной скоростью в направлении субсканирования с помощью линейного двигателя. В это время лазерный пучок от источника лазерного излучения расщепляется на шестнадцать параллельных пучков, которые модулируются с помощью электронных затворов сигналами, основанными на растровых данных наносимого изображения. Из электронных затворов эти пучки попадают на вращающееся полигональное зеркало, отражаются от его граней, фокусируются fθ-линзой, отклоняются направляющим зеркалом и, пройдя через линзу-конденсор, совершают сканирование заготовки. Компьютерная система управления формирует упомянутые сигналы модуляции таким образом, чтобы лазерное излучение, попадающее на подложку в процессе сканирования, облучало только определенные ее области, совершая прямое лазерное экспонирование. Из этих областей в процессе работы устройства формируется рисунок создаваемого изображения.
Недостатком этого устройства является сложность, связанная с распараллеливанием пучка лазерного излучения при построении оптико-механической системы.
Из числа аналогов наиболее близким по технической сущности к заявляемому устройству является устройство для прямого лазерного экспонирования [Laser direct imaging apparatus, JP 2007094122 A, опубл. 12.04.2007], которое и принято в качестве прототипа.
Прототип осуществляет прямое экспонирование фоторезиста лучом лазера и является более простым устройством, в котором исключена система распараллеливания пучка лазерного излучения, а дефекты оптико-механической системы корректируются с помощью однолучевого блока отклонения оптической оси.
В состав прототипа входят источник лазерного излучения, плоское зеркало, полигональное зеркало, fθ-линза, направляющее зеркало, двигатель, сенсор начала, панель для размещения оптических элементов, основание с установленной на нем горизонтально подставкой, с которой жестко соединена панель для размещения оптических элементов, где закреплены источник лазерного излучения, плоское зеркало, полигональное зеркало, fθ-линза и направляющее зеркало, причем источник лазерного излучения и плоское зеркало установлены таким образом, что лазерный пучок попадает в центр этого зеркала, а полигональное зеркало, fθ-линза и направляющее зеркало размещены так, чтобы при вращении полигонального зеркала отраженный от его граней пучок излучения проходил через fθ-линзу, отражался от направляющего зеркала в сторону плоскости размещения заготовки и производил ее сканирование, при этом сенсор начала прикреплен к подставке в таком положении, чтобы пучок лазерного излучения при каждом сканирующем движении мог кратковременно попадать на светочувствительную зону сенсора, а двигатель имел механическую связь с заготовкой для ее перемещения в направлении субсканирования.
Кроме того, прототип содержит расширитель пучка, акустико-оптический модулятор, цилиндрическую линзу, зеркало сенсора начала, дополнительное плоское зеркало, средство отклонения оптической оси, четырехсекционные фотосенсоры, направляющие столика, подвижный столик, установленный на направляющих столика, закрепленных на основании, причем двигатель в линейном исполнении смонтирован на основании и соединен подвижной частью с подвижным столиком, а плоское зеркало, расширитель пучка, дополнительное плоское зеркало, акустико-оптический модулятор и средство отклонения оптической оси расположены на панели для размещения оптических элементов так, чтобы отраженный плоским зеркалом пучок лазерного излучения проходил через расширитель пучка, отражался от дополнительного плоского зеркала, попадал в акустико-оптический модулятор, затем отражался от средства отклонения оптической оси в сторону полигонального зеркала, при этом четырехсекционные фотосенсоры размещены на подвижном столике вдоль его наиболее удаленного от подставки края с равномерным интервалом вдоль прямой линии, параллельной направлению сканирования, цилиндрическая линза прикреплена к подставке таким образом, что совершающий сканирование лазерный пучок, отраженный от направляющего зеркала, проходит через цилиндрическую ось цилиндрической линзы и фокусируется на поверхности экспонируемой заготовки, а зеркало сенсора начала установлено рядом с одним из краев цилиндрической линзы под ней в положении, позволяющем направлять кратковременно попадающий на это зеркало пучок лазерного излучения на светочувствительную поверхность сенсора начала.
Прототип работает следующим образом.
Пусть в начальный момент времени плоская заготовка зафиксирована на подвижном столике, который выдвинут на максимальное расстояние от подставки, источник лазерного излучения выключен, двигатель находится в остановленном состоянии, а полигональное зеркало неподвижно.
После поступления сигнала "Пуск" от компьютерной системы управления полигональное зеркало начинает вращаться с некоторой постоянной скоростью, а двигатель начинает перемещать подвижный столик с размещенной на нем плоской заготовкой в направлении субсканирования. После этого источник лазерного излучения начинает излучать лазерный пучок, промодулированный с помощью акустико-оптического модулятора специально сформированным электрическим сигналом. Это излучение попадает на вращающееся полигональные зеркало. Отразившийся от его движущихся граней пучок лазерного излучения, пройдя через fθ-линзу и отразившись от направляющего зеркала, фокусируется цилиндрической линзой, попадает на поверхность заготовки и совершает ее сканирование. При этом во время каждого сканирующего движения этот лазерный пучок через зеркало сенсора начала кратковременно попадает на светочувствительную зону сенсора начала, который генерирует электрические импульсы. По этим импульсам компьютерная система управления синхронизирует во времени сигналы модуляции лазерного излучения. Оптическая конструкция, представляющая собой совокупность fθ-линзы и цилиндрической линзы, обеспечивает фокусирование упомянутого пучка на сканируемую поверхность в каждый момент времени. При каждом сканирующем движении средство отклонения оптической оси корректирует ее таким образом, чтобы линия сканирования представляла собой прямую.
Таким образом, сканирующая система экспонирует прямую линию на покрытой фоторезистом плоской заготовке точно направляемым лазерным пучком. При этом механическое устройство перемещения, представляющее собой подвижный столик с линейным приводом, обеспечивает равномерное движение заготовки относительно других элементов в перпендикулярном этой линии направлении, а компьютерная система управления с помощью акустико-оптического модулятора обеспечивает прохождение и блокирование лазерного излучения в строго определенные моменты времени так, чтобы оно попадало только на те участки поверхности, которые соответствуют засвечиваемым пикселам наносимого изображения. В итоге в слое фоторезиста линия за линией из облученных и необлученных участков формируется рисунок.
Недостатком прототипа является конструкционная сложность средств перемещения в оптико-механической системе, обусловленная наличием подвижного столика с элементами позиционирования заготовки.
Задачей, на решение которой направлено заявляемое изобретение, является упрощение устройства за счет применения простого средства перемещения экспонируемой подложки, позволяющего исключить из оптико-механической системы подвижный столик с элементами позиционирования.
Техническим результатом является упрощение конструкции за счет применения простой валковой подачи с направляющей поверхностью для перемещения расположенной вертикально плоской заготовки в направлении субсканирования, что позволяет осуществлять движение экспонируемой подложки непосредственно без применения подвижного столика при сохранении функциональных возможностей устройства.
Указанный технический результат достигается тем, что в устройство, содержащее источник лазерного излучения, плоское зеркало, полигональное зеркало, fθ-линзу, направляющее зеркало, двигатель, сенсор начала, панель для размещения оптических элементов, основание с установленной на нем горизонтально подставкой, с которой жестко соединена панель для размещения оптических элементов, где закреплены источник лазерного излучения, плоское зеркало, полигональное зеркало, fθ-линза и направляющее зеркало, причем источник лазерного излучения и плоское зеркало установлены таким образом, что лазерный пучок попадает в центр этого зеркала, а полигональное зеркало, fθ-линза и направляющее зеркало размещены так, чтобы при вращении полигонального зеркала отраженный от его граней пучок излучения проходил через fθ-линзу, отражался от направляющего зеркала в сторону плоскости размещения заготовки и производил ее сканирование, при этом сенсор начала прикреплен к подставке в таком положении, чтобы пучок лазерного излучения при каждом сканирующем движении мог кратковременно попадать на светочувствительную зону сенсора, а двигатель имел механическую связь с заготовкой для ее перемещения в направлении субсканирования, введены червяк, восемь червячных колес, две рамки с вырезами, восемь осей с закрепленными на них валками из эластичного материала, установленные параллельно рядами по четыре штуки в рамки таким образом, чтобы между валками сохранялся равномерный зазор, при этом зазор между вторым и третьим валками в каждой рамке находится напротив выреза в ней, а сами рамки жестко прикреплены к подставке одна напротив другой так, что все валки располагаются вертикально, а те из них, что находятся в разных рамках напротив друг друга, образуют соприкасающиеся поверхностями пары для передвижения экспонируемой заготовки в направлении субсканирования, причем оси валков проходят насквозь через подставку и выходят под ней концами, на которых в два ряда закреплены червячные колеса, двигатель выполнен шаговым и закреплен на подставке с нижней стороны, его вал соединен с червяком, который закреплен на подставке снизу способом, позволяющим ему свободно вращаться вокруг продольной оси, и расположен между двумя рядами червячных колес так, что соприкасается с зубьями каждого из них и образует с ними червячную передачу, плоское зеркало сориентировано так, чтобы направляемый на него пучок из источника лазерного излучения отражался непосредственно на полигональное зеркало, а положение направляющего зеркала позволяет ему направлять пучок прошедшего через fθ-линзу лазерного излучения через вырез в одной из рамок и зазор между двумя валками сразу на поверхность экспонируемой заготовки.
Сущность предлагаемого изобретения состоит в использовании вертикальной валковой подачи с протягиванием вдоль направляющей поверхности для перемещения покрытой фоторезистом плоской заготовки в направлении субсканирования при сканировании ее поверхности пучком лазерного излучения, промодулированным сигналом, основанным на растровых данных наносимого изображения.
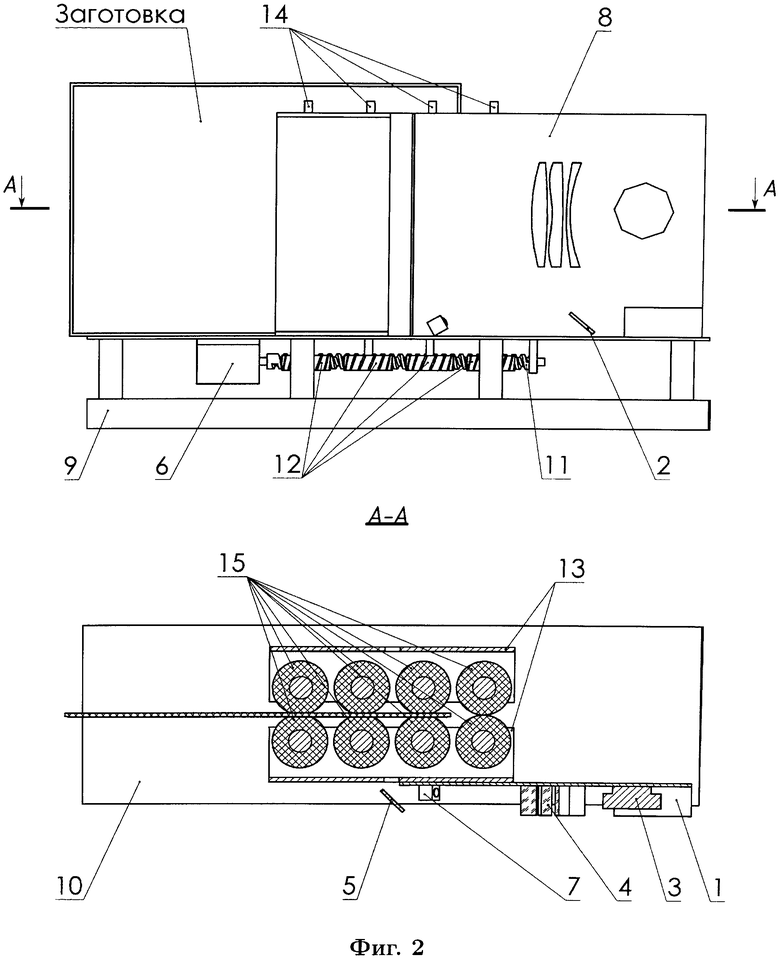
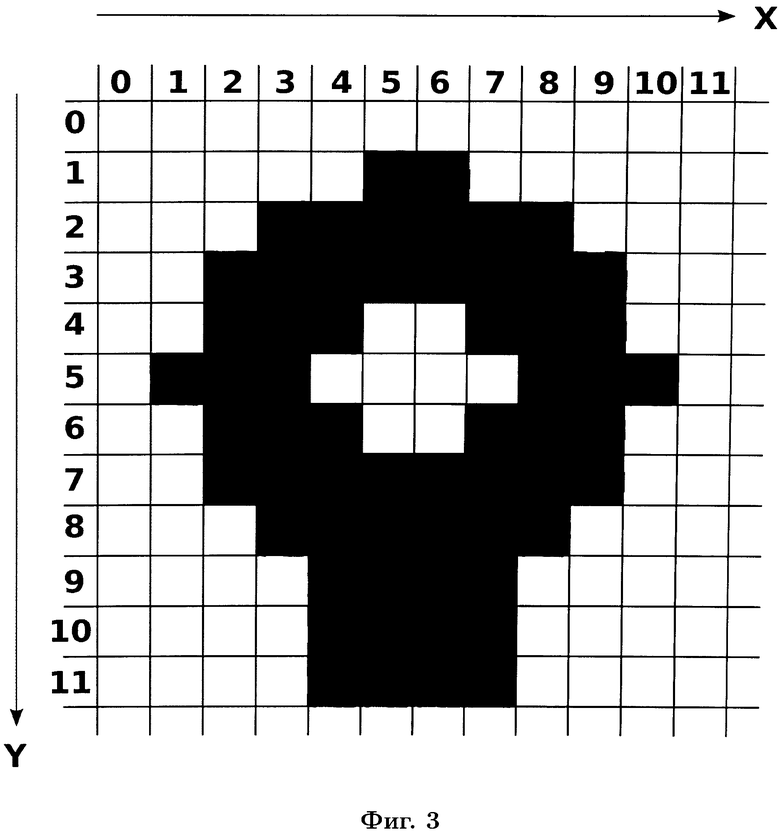
Сущность предлагаемого изобретения поясняется чертежами, где на фиг. 1 представлена аксонометрия устройства прямого лазерного экспонирования, на фиг. 2 отображены его фронтальный вид и сечение горизонтальной плоскостью, на фиг. 3 изображен пример растрового рисунка, а на фиг. 4 приведена схема работы сканирующего устройства.
Предлагаемое устройство (фиг. 1) содержит источник 1 лазерного излучения, плоское зеркало 2, полигональное зеркало 3, fθ-линзу 4, направляющее зеркало 5, двигатель 6, сенсор начала 7, панель для размещения оптических элементов 8, основание 9 с установленной на нем горизонтально подставкой 10, с которой жестко соединена панель 8 для размещения оптических элементов, где закреплены источник 1 лазерного излучения, плоское зеркало 2, полигональное зеркало 3, fθ-линза 4 и направляющее зеркало 5, причем источник 1 лазерного излучения и плоское зеркало 2 установлены таким образом, что лазерный пучок попадает в центр этого зеркала, а полигональное зеркало 3, fθ-линза 4 и направляющее зеркало 5 размещены так, чтобы при вращении полигонального зеркала 3 отраженный от его граней пучок излучения проходил через fθ-линзу 4, отражался от направляющего зеркала 5 в сторону плоскости размещения заготовки и производил ее сканирование, при этом сенсор начала 7 прикреплен к подставке 10 в таком положении, чтобы пучок лазерного излучения при каждом сканирующем движении мог кратковременно попадать на светочувствительную зону сенсора 7, а двигатель 6 имел механическую связь с заготовкой для ее перемещения в направлении субсканирования. Кроме того, оно содержит червяк 11, восемь червячных колес 12, две рамки 13 с вырезами, восемь осей 14 с закрепленными на них валками 15 из эластичного материала, установленные параллельно рядами по четыре штуки в рамки 13 таким образом, чтобы между валками 15 сохранялся равномерный зазор, при этом зазор между вторым и третьим валками 15 в каждой рамке 13 находится напротив выреза в ней, а сами рамки 13 жестко прикреплены к подставке 10 одна напротив другой так, что все валки 15 располагаются вертикально, а те из них, что находятся в разных рамках 13 напротив друг друга, образуют соприкасающиеся поверхностями пары для передвижения экспонируемой заготовки в направлении субсканирования, причем оси 14 валков 15 проходят насквозь через подставку 10 и выходят под ней концами, на которых в два ряда закреплены червячные колеса 12, двигатель 6 выполнен шаговым и закреплен на подставке 10 с нижней стороны, его вал соединен с червяком 11, который закреплен на подставке 10 снизу способом, позволяющим ему свободно вращаться вокруг продольной оси, и расположен между двумя рядами червячных колес 12 так, что соприкасается с зубьями каждого из них и образует с ними червячную передачу, плоское зеркало 2 сориентировано так, чтобы направляемый на него пучок из источника 1 лазерного излучения отражался непосредственно на полигональное зеркало 3, а положение направляющего зеркала 5 позволяет ему направлять пучок прошедшего через fθ-линзу 4 лазерного излучения через вырез в одной из рамок 13 и зазор между двумя валками 15 сразу на поверхность экспонируемой заготовки.
Устройство работает следующим образом.
Пусть в начальный момент времени плоская заготовка зажата между валками 15, источник 1 лазерного излучения выключен, двигатель 6 находится в остановленном состоянии, а полигональное зеркало 3 неподвижно.
После поступления сигнала "Пуск" от компьютерной системы управления полигональное зеркало 3 начинает вращаться с некоторой постоянной скоростью, двигатель 6 начинает поворачивать червяк 11, вращательное движение которого передается на червячные колеса 12, оси валков 14 и валки 15, двигающие зажатую между ними покрытую фоторезистом заготовку в направлении субсканирования. После этого источник 1 лазерного излучения начинает излучать лазерный пучок, промодулированный специально сформированным электрическим сигналом. Это излучение отражается от плоского зеркала 2 и попадает на вращающееся полигональное зеркало 3. Отразившийся от его движущихся граней, пучок лазерного излучения, пройдя через fθ-линзу 5 и отразившись от направляющего зеркала 5, попадает на поверхность заготовки и совершает ее сканирование. При этом во время каждого сканирующего движения этот лазерный пучок кратковременно попадает на светочувствительную зону сенсора начала 7, генерирующего при этом электрические импульсы, по которым компьютерная система управления синхронизирует во времени сигналы модуляции лазерного излучения. Оптическая конструкция, представляющая собой fθ-линзу 4, обеспечивает фокусировку упомянутого пучка на сканируемую поверхность в каждый момент времени.
Таким образом, сканирующая система экспонирует прямую линию на покрытой фоторезистом плоской заготовке точно направленным лазерным пучком. При этом механическое устройство перемещения, представляющее собой валковую подачу, обеспечивает равномерное движение этой заготовки относительно других элементов в перпендикулярном данной линии направлении, а компьютерная система управления включает и выключает источник 1 лазерного излучения в строго определенные моменты времени так, чтобы его излучение попадало только на те участки, которые соответствуют засвечиваемым пикселам наносимого изображения. В итоге в слое фоторезиста линия за линией из облученных и необлученных участков формируется рисунок.
В основу работы устройства положен принцип модуляции лазерного излучения основанным на растровых данных изображения сигналом при сканировании лазерным пучком движущейся в направлении субсканирования поверхности, равномерно перемещаемой с помощью валковой подачи, вращение валков которой обеспечено двигателем вращения, соединенным с каждым из них посредством червячной передачи.
В качестве источника 1 лазерного излучения данное устройство использует полупроводниковый лазерный диод, излучение которого регулируется проходящим через него током. Модуляция лазерного пучка растровыми данными наносимого изображения производится следующим образом.
На фиг. 3 схематически изображен пример растрового рисунка, помещенного в прямоугольную координатную сетку. Видно, что он состоит из пикселов двух типов, каждый из которых связан с участком поверхности, который необходимо облучить пучком излучения или, наоборот, оставить необлученным. Каждый из этих пикселов имеет свои координаты, обозначающие, в каком столбце (координата по оси X) и в какой строке (координата по оси Y) он находится. Компьютерная система управления сопоставляет имеющуюся в ее памяти информацию с точками на поверхности заготовки и включает либо выключает источник 1 лазерного излучения, когда сканирующая система направляет излучение в каждую из этих точек. Определение координат места, на которое в данный момент направлена система сканирования, и переключение источника 1 излучения производится с постоянной частотой ν, при этом устройство скомпоновано таким образом, чтобы ось Х была параллельна линии сканирования, а ось Y совпадала с направлением перемещения заготовки. Это позволяет связывать координату по оси Х экспонируемой в данный момент точки поверхности только с состоянием сканирующей системы, а координату по оси Y получать из информации о работе валковой подачи.
Сканирующая система данного устройства оснащена сенсором начала 7, который генерирует электрический сигнал при каждом сканирующем движении во время попадания на его светочувствительную зону лазерного излучения. Компьютерная система управления считает количество n интервалов времени, равных периоду дискретизации 
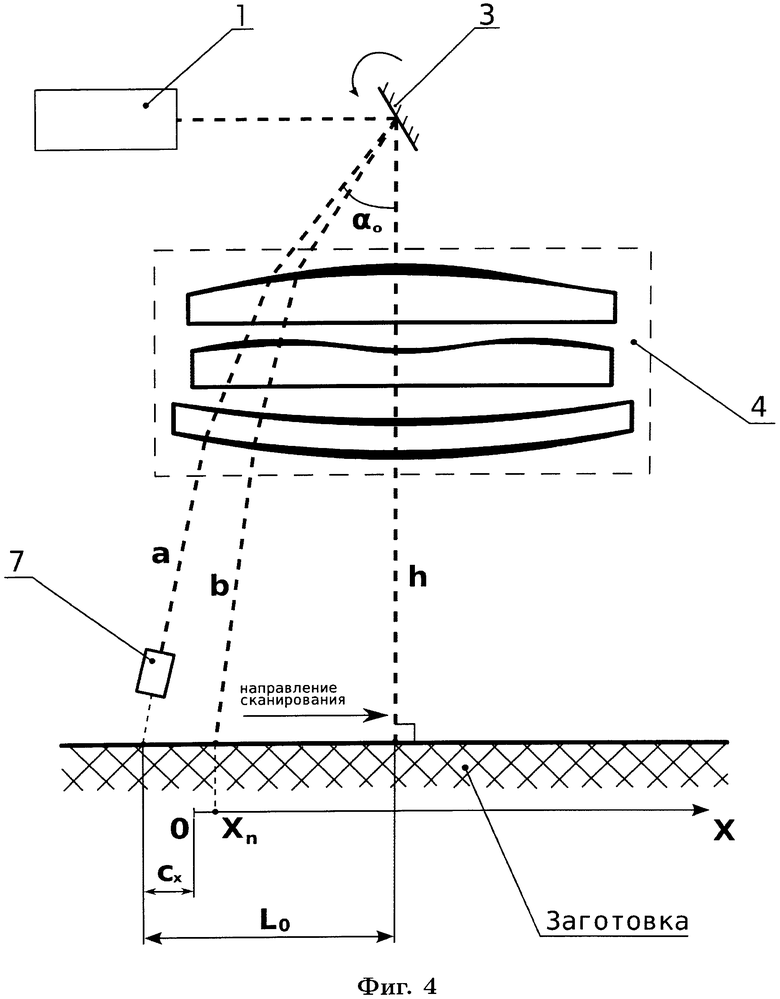
Принцип работы используемой сканирующей системы поясняется на фиг. 4, где изображены источник 1 лазерного излучения, вращающееся зеркало 3, fθ-линза 4, сенсор начала 7 и поверхность заготовки. Кроме того, на фиг. 4 отображены смещение cx системы отсчета координат, координатная ось Х и траектории движущегося к экспонируемой поверхности вертикально (h), попадающего на сенсор начала 7 (а) и падающего на произвольную точку линии сканирования (b) пучков лазерного излучения, а также отмечено расстояние L0 между предлагаемой точкой падения луча на поверхность заготовки в момент поступления сигнала от сенсора начала 7 и траекторией h. В такой системе в каждый момент времени можно определить координату Х (номер в строке на фиг. 3) пиксела, соответствующего точке, на которую направляется пучок лазерного излучения, по формуле:
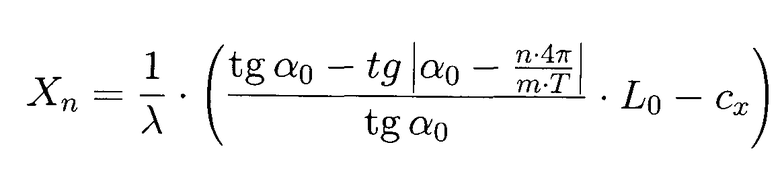 ,
,
где
Xn - координата отображаемого пиксела по оси X;
λ - размер пиксела;
α0 - угол между нормалью к поверхности и лазерным лучом, отраженным зеркалом 3 и направленным на сенсор начала 7;
n - количество интервалов времени τ, прошедших с момента получения сигнала от сенсора начала 7;
m - количество граней полигонального зеркала 3;
Т - период повторения сигнала от сенсора начала 7;
L0 - расстояние между предполагаемой точкой падения луча на поверхность заготовки в момент поступления сигнала от сенсора начала 7 и траекторией h;
cx - подстроечное смещение координат по оси X.
Передвижение заготовки вдоль оси Y обеспечивает валковая подача. Она состоит из восьми валков 15 из эластичного материала, оси которых соединены червячной передачей с единым червяком 11, к которому подведен вращательный момент от шагового двигателя 6. Компьютерная система управления в каждый момент времени экспонирования хранит информацию о количестве k шагов, сделанных двигателем 6 с момента начала нанесения изображения. Используя эту информацию, возможно получить координату по оси Y, исходя из состояния валковой подачи, по формуле:
 ,
,
где
Yk - номер отображаемой строки;
αs - угол поворота червяка 11 за один шаг шагового двигателя 6;
k - номер шага шагового двигателя б;
N - количество зубьев в червячном колесе 12;
λ - размер пиксела;
R - радиус валка 15;
d - толщина заготовки;
cy - подстроечное смещение координат по оси Y.
Наносимый рисунок позиционируется с высокой точностью благодаря подбору подстроечных констант cx и cy во время юстировки аппарата. Эти константы позволяют смещать изображение относительно заготовки вдоль осей Х и Y соответственно.
Посредством изменения скорости вращения двигателя 6 данное устройство позволяет управлять интенсивностью облучения заготовки. Если энергии однократного сканирующего прохода пучком лазерного излучения недостаточно для нанесения изображения на данный тип фоторезиста, то можно добиться многократного экспонирования каждой растровой строки, замедлив движение заготовки или останавливая его на некоторое время после каждого шага двигателя 6.
Конструкция устройства предполагает продвижение плоской заготовки валками 15 таким образом, чтобы она все время касалась одним из краев гладкой горизонтальной поверхности подставки 10 и направлялась ею. Это гарантирует прямолинейность движения заготовки, а также позволяет позиционировать изображение на ней по оси X. Благодаря тому что в конструкции ряды валков 15 размещены в отдельных рамках 13, ширина заготовки может быть больше размера валков 15 и может выходить за границы рамок 13. В этом случае для достижения более полного использования поверхности, например, прямоугольной заготовки после экспонирования одного края ее можно перевернуть экспонированной частью вверх, чтобы затем нанести изображение на другой край.
Работа с устройством производится в следующем порядке. В компьютер, соединенный с устройством прямого лазерного экспонирования линией цифровой связи, с помощью специальной программы загружается наносимое изображение. После этого заготовка, покрытая слоем фоторезиста, помещается в начальное положение между валками 15. По сигналу "Пуск" от компьютера в устройстве приводятся в действие сканирующая система и валковая подача, а упомянутая компьютерная программа начинает передавать по линии связи данные, с помощью которых модулируется лазерное излучение. Когда нанесение изображения оканчивается, валки 15 подачи выгружают заготовку из установки.
Таким образом, оптико-механическая система использует простую валковую подачу заготовки, находящейся в вертикальном положении, что позволяет исключить из этой системы подвижный столик с элементами позиционирования подложки, благодаря чему упрощается устройство прямого лазерного экспонирования.
Изобретение относится к области фотомеханического изготовления поверхностей с рисунком и касается устройства для прямого лазерного экспонирования. Устройство включает в себя источник лазерного излучения, плоское и полигональное зеркала, fθ-линзу, направляющее зеркало, двигатель, сенсор начала, панель для размещения оптических элементов, основание с установленной на нем горизонтально подставкой. Кроме того, в устройство введены червяк, восемь червячных колес, две рамки с вырезами, восемь осей с закрепленными на них валками из эластичного материала, установленные параллельно рядами по четыре штуки в рамки таким образом, чтобы между валками сохранялся равномерный зазор. При этом зазор между вторым и третьим валками в каждой рамке находится напротив выреза в ней, а сами рамки жестко прикреплены к подставке одна напротив другой так, что все валки располагаются вертикально и образуют соприкасающиеся поверхностями пары для передвижения экспонируемой заготовки. Технический результат заключается в упрощении устройства. 4 ил.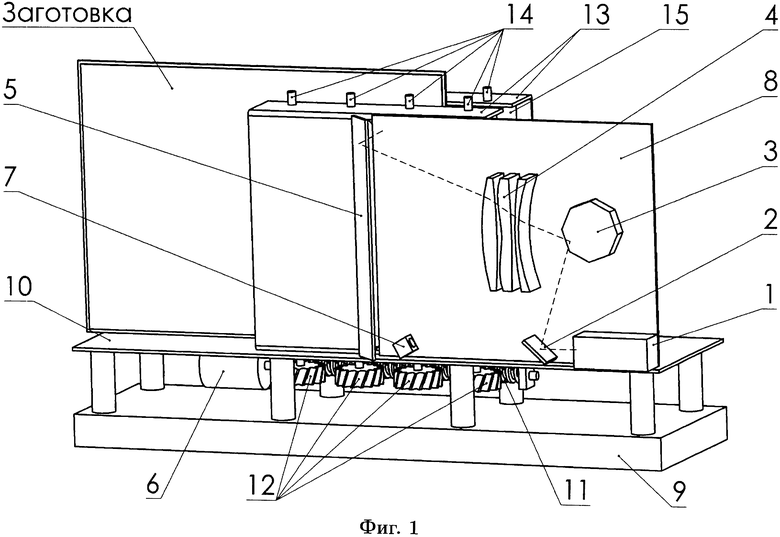
Устройство для прямого лазерного экспонирования, содержащее источник лазерного излучения, плоское зеркало, полигональное зеркало, fθ-линзу, направляющее зеркало, двигатель, сенсор начала, панель для размещения оптических элементов, основание с установленной на нем горизонтально подставкой, с которой жестко соединена панель для размещения оптических элементов, где закреплены источник лазерного излучения, плоское зеркало, полигональное зеркало, fθ-линза и направляющее зеркало, причем источник лазерного излучения и плоское зеркало установлены таким образом, что лазерный пучок попадает в центр этого зеркала, а полигональное зеркало, fθ-линза и направляющее зеркало размещены так, чтобы при вращении полигонального зеркала отраженный от его граней пучок излучения проходил через fθ-линзу, отражался от направляющего зеркала в сторону плоскости размещения заготовки и производил ее сканирование, при этом сенсор начала прикреплен к подставке в таком положении, чтобы пучок лазерного излучения при каждом сканирующем движении мог кратковременно попадать на светочувствительную зону сенсора, а двигатель имеет механическую связь с заготовкой для ее перемещения в направлении субсканирования, отличающееся тем, что в устройство введены червяк, восемь червячных колес, две рамки с вырезами, восемь осей с закрепленными на них валками из эластичного материала, установленные параллельно рядами по четыре штуки в рамки таким образом, чтобы между валками сохранялся равномерный зазор, при этом зазор между вторым и третьим валками в каждой рамке находится напротив выреза в ней, а сами рамки жестко прикреплены к подставке одна напротив другой так, что все валки располагаются вертикально, а те из них, что находятся в разных рамках напротив друг друга, образуют соприкасающиеся поверхностями пары для передвижения экспонируемой заготовки в направлении субсканирования, причем оси валков проходят насквозь через подставку и выходят под ней концами, на которых в два ряда закреплены червячные колеса, двигатель выполнен шаговым и закреплен на подставке с нижней стороны, его вал соединен с червяком, который закреплен на подставке снизу способом, позволяющим ему свободно вращаться вокруг продольной оси, и расположен между двумя рядами червячных колес так, что соприкасается с зубьями каждого из них и образует с ними червячную передачу, плоское зеркало сориентировано так, чтобы направляемый на него пучок из источника лазерного излучения отражался непосредственно на полигональное зеркало, а положение направляющего зеркала позволяет ему направлять пучок прошедшего через fθ-линзу лазерного излучения через вырез в одной из рамок и зазор между двумя валками сразу на поверхность экспонируемой заготовки.
| JP 2007094122 A, 12.04.2007 | |||
| US 5980088 A1, 09.11.1999 | |||
| US 20010053487 A1, 20.12.2001 | |||
| RU 2059984 C1, 10.05.1996 |

