Область техники, к которой относится изобретение
Настоящее изобретение относится к системе с датчиками и способу для обнаружения образования льда, и более точно для определения, насколько близки окружающие условия к тем условиям, в которых на поверхности будет образовываться лед.
Уровень техники
На самолете лед, нарастающий на крыльях, пропеллерах, лопатках ротора, управляющих поверхностях и т.д., может вызвать трудности для пилотирования, оказывая неблагоприятное воздействие на управляемость самолета. Будет или нет происходить образование льда, зависит от условий локальной окружающей среды, таких как температура атмосферы, давление и содержание влаги, так же, как скорость самолета. Традиционно используются сигнализаторы обледенения, которые, как правило, ищут присутствие льда на внешней поверхности самолета таким образом, чтобы генерировать индикацию или предупреждение о существовании условий для образования обледенения. Недостатком этих устройств является то, что они могут обнаружить условия для образования обледенения после того, как лед начал образовываться. Они не могут определить, насколько близко находятся локальные условия к условиям для образования льда, или изменяются ли эти условия, и как быстро они изменяются. Чтобы гарантировать, что самолет остается управляемым и безопасным, для пилота важно знать, какими являются условия потока воздуха, как близко они находятся к условиям льдообразования, и образуется ли лед, или он с некоторой вероятностью может образоваться на поверхностях самолета, если не предпринять предупреждающего действия. Традиционные сигнализаторы обледенения становятся особенно неэффективными, когда температура воздуха близка к точке замерзания или несколько ниже ее.
Документ US 6456200 раскрывает устройство для обнаружения образования льда, которое использует термоэлектрический элемент Пельтье в качестве устройства измерения разницы температуры. Образования льда обнаруживается за счет измерения изменения в тепловом потоке, благодаря освобождению скрытой теплоты во время процесса образования льда, что вызывает генерирование напряжения на концах элемента Пельтье.
Раскрытие изобретения
Целью настоящего изобретения является обеспечение способа, системы и воспринимающего устройства для использования в такой системе, которая уменьшает вышеупомянутые ограничения и недостатки.
Дополнительной целью настоящего изобретения является обеспечение воспринимающего устройства, которое будет позволять системе определить близость условий для образования льда. Говоря другими словами, это система, которая может обеспечить определение признаков того, насколько близко локальные условия окружающей среды приблизились к тем условиям, при которых будет образовываться лед, или определить, образовался лед или нет.
Согласно первому аспекту настоящего изобретения обеспечивается система с датчиками для определения близости условий окружающей среды к условиям для образования льда. Система содержит:
- датчик, имеющий воспринимающую поверхность, предназначенную для воздействия на нее окружающей среды, средства в виде электрического теплового насоса для охлаждения и/или нагревания поверхности, и один или более термочувствительных элементов для обеспечения сигнала, представляющего температуру поверхности;
- средства для определения температуры окружающей среды; и
- процессор для определения близости условий окружающей среды, которые воздействуют на поверхность, к процессу образования льда, исходя из температуры, определенной термочувствительным элементом, и температуры окружающей среды.
Согласно второму аспекту настоящего изобретения обеспечивается система с датчиками для определения близости условий окружающей среды к условиям образования льда. Система содержит:
- датчик, имеющий воспринимающую поверхность, предназначенную для воздействия на нее окружающей среды, средства в виде электрического теплового насоса для охлаждения и/или нагревания поверхности, и термочувствительный элемент для обеспечения сигнала, представляющего температуру поверхности;
- устройство контроля мощности для определения значения мощности, требуемой для нагревания или охлаждения поверхности до температуры, показывающей образование льда; и
- процессор для определения близости условий окружающей среды, которые воздействуют на поверхность, к условиям образования льда, исходя из обнаруженных температур и значения мощности для нагревания или охлаждения.
В вариантах осуществления изобретения первого и второго аспектов, средства для охлаждения и/или нагревания содержат тепловой насос. Предпочтительно, чтобы тепловой насос был двунаправленным тепловым насосом, например, тепловым насосом Пельтье, или другими устройствами, основанными на нагревании и охлаждении текучей среды. Предпочтительно, средства для охлаждения дополнительно содержат теплоотводящий радиатор.
Предпочтительно, чтобы термочувствительный элемент содержал один или более термометров или термопар. Более предпочтительно, чтобы термометры включали в себя платиновый или никелевый резистивные термометры.
В варианте осуществления изобретения датчик конфигурируется для использования на самолете таким образом, поверхность датчика находится заподлицо с поверхностью самолета, такой как обшивка самолета или крыло. В альтернативном варианте осуществления изобретения поверхность датчика формирует часть структуры, установленной на самолете, такой как стойка или хвостовое оперение.
Поверхность датчика может находиться, по существу, перпендикулярно направлению потока воздуха, обтекающего самолет. Альтернативно, поверхность датчика может быть, по существу, параллельна направлению потока воздуха, обтекающего самолет. Тот факт, что устройство может быть использовано для определения условий образования льда либо в области застойной зоны потока, или в области пограничного ламинарного слоя, является преимуществом. Альтернативно, поверхность датчика может быть ориентирована под углом к направлению потока, обтекающего самолет, чтобы помочь поглощению влажности, и помочь льду или влажности отрываться от поверхности датчика.
В вариантах осуществления изобретения система с датчиками может содержать множество датчиков, каждый из которых имеет поверхность, открытую для воздействия окружающей среды, в которой обрабатывающее устройство определяет близость условий для образования льда из обнаруженных температур и/или значения мощности на нагревание или охлаждение для каждого из множества датчиков.
В вариантах осуществления изобретения процессор может быть сконфигурирован таким образом, чтобы определять интенсивность образования льда.
Согласно третьему аспекту настоящего изобретения обеспечивается способ определения близости окружающей среды к условиям для образования льда, содержащий следующие шаги:
- обеспечение поверхности, открытой для воздействия окружающей среды,
- охлаждение или нагревание поверхности,
- отслеживание температуры поверхности,
- определение температуры, показывающей на образование льда,
- определение температуры окружающей среды, и
- определение близости условий окружающей среды, воздействию которых подвергается поверхность, к условиям для образования льда, исходя из отслеживаемых температур и температуры окружающей среды.
Приближение к условиям образования льда может иметь значение, определяемое как разница между температурой окружающей среды и температурой, показывающей на образование льда. Температура окружающей среды может быть преобладающей температурой воздуха. Температура окружающей среды может быть определена из температуры поверхности датчика, когда нет его охлаждения или нагревания, также она может быть определена из независимого датчика температуры, или может быть обеспечена с помощью других систем самолета.
Когда локальные условия окружающей среды теплее, чем условия, когда ожидается образование льда, то значение, придаваемое определяемому приближению, может иметь одну полярность, например положительную, в то время как значение приближения может быть отображено как отрицательное, если условия уже являются такими, что происходит образование льда. Величина значения приближения показывает, насколько близко находится пороговое значение для образования льда, т.е. точка, в которой лед будет или не будет образовываться. Когда условия уже являются такими, что происходит образование льда, величина приближения образования льда указывает на то, насколько сильно необходимо изменить условия, чтобы выйти из процесса образования льда.
Согласно четвертому аспекту настоящего изобретения обеспечивается способ определения близости окружающей среды к условиям для образования льда, содержащий следующие шаги:
- обеспечение поверхности, открытой для воздействия окружающей среды,
- охлаждение или нагревание поверхности,
- отслеживание температуры поверхности,
- определение количества энергии, требуемой для нагревания или охлаждения поверхности до температуры, показывающей на образование льда, и
- определение близости условий окружающей среды, воздействию которых подвергается поверхность, к условиям для образования льда, исходя из отслеживаемых температур и количества энергии, требуемой для нагревания или охлаждения.
Предпочтительно, способ дополнительно содержит определение потенциала образования льда как отображение времени или вероятности возникновения условий для образования льда, или, если условия для образования льда уже существуют, потенциал образования льда может быть обозначением времени, или вероятности того, что условия для образования льда уже прекратились или самолет выходит из этих условий. Потенциал образования льда может быть определен с помощью измерения скорости изменения и направления приближения к условиям для образования льда.
В варианте осуществления изобретения охлаждение или нагревание поверхности выполняется с известной или практически постоянной мощностью. Температура, показывающая образование льда, может быть определена с помощью измерения изменения температуры со временем и определения пологого участка кривой, или изменения в направлении отклонения температуры со временем, являющегося результатом скрытой теплоты при образовании льда.
В альтернативном варианте осуществления изобретения этап охлаждения или нагревания поверхности содержит управление охлаждением или нагреванием, чтобы обеспечить известную или практически постоянную скорость изменения температуры на единицу времени. Температура, показывающая образование льда, может быть определена с помощью отслеживания мощности для охлаждения или нагревания во времени, чтобы определить температуру, при которой происходит изменение в мощности, являющееся результатом скрытой теплоты при образовании льда.
В вариантах осуществления изобретения способ может содержать попеременное охлаждение или нагревание поверхности. Приближение к условиям образования льда может быть определено в обоих случаях: когда поверхность нагревается и когда она охлаждается. Способ может содержать постоянно повторяющиеся попеременные нагревание и охлаждение.
В предпочтительном варианте осуществления изобретения способ дополнительно содержит шаг для определения интенсивности образования льда. Предпочтительно, что шаг для определения интенсивности образования льда содержит измерение величины и продолжительности увеличения по температуре, когда происходит образование льда во время охлаждения.
Является преимуществом также и то, что наряду с получением информации о приближении к условиям образования льда, пилот может отдавать себе полный отчет об интенсивности условий для образования льда. На необходимость предпринять предупреждающее действие может оказать влияние интенсивность условий для образования льда. Кроме того, эффективность любого предпринятого предупреждающего действия будет отражаться на изменении интенсивности. Интенсивность может быть представлена как сгруппированный по категориям вывод, например полное отсутствие, легкая форма, средняя или интенсивное образование льда, или может быть представлена в цифровом виде, например, как значение содержания воды в жидком виде.
Система обнаружения льда, как описано выше, обеспечивает конкретные преимущества по сравнению с традиционными системами для обнаружения льда. Существует возможность обеспечить информацию для пилота самолета о приближении к условиям образования льда, когда самолет летит через изменяющиеся условия окружающей среды. Это особенно важно, поскольку условия могут вызвать образование льда на определенной поверхности, расположенной на самолете, без образования льда на специфическом месте расположения традиционного датчика, который является датчиком, и следовательно, пилот не осознавал бы происходящий процесс образования льда. Однако эти обстоятельства могут возникнуть там, где существуют различные локальные условия окружающей среды на местах расположения различных поверхностей, например, благодаря локальным вариациям давления.
Пока поддерживается полет самолета или вертолета в направлении вперед, на датчике представлен постоянный и устойчивый воздушный поток, который является желательным, чтобы позволить датчику быстро и точно обнаруживать изменения в окружающих условиях, которые воздействуют на датчик. Однако когда вертолет зависает в воздухе, скорость полета вперед больше не обеспечивает такой воздушный поток над датчиком, и по существу, время реакции и точность будут ухудшаться. Традиционные датчики обычно используют отводимый от двигателя воздух, чтобы поддерживать воздушный поток над датчиком даже во время зависания в воздухе, чтобы позволить непрерывное отслеживание измерения датчиком. Использование отводимого от двигателя воздуха является нежелательным, поскольку это отбирает энергию от двигателя, является более сложным при установке, и отводимый воздух по своей сути является горячим, что приуменьшает действенность процесса при попытке обнаружить образование льда.
Таким образом, в соответствии с пятым аспектом настоящего изобретения обеспечивается система обнаружения льда, содержащая:
- вращающуюся поверхность,
- датчик, установленный на вращающейся поверхности, при этом датчик содержит средства для определения температуры с целью определения температуры вращающейся поверхности и температуры окружающей среды, в которой поверхность вращается, и
- процессор для определения приближения или наличия условий для образования льда, основываясь на обнаруженных температурах.
Вращающаяся поверхность может быть, например, поверхностью ротора, пропеллера или лопаткой турбины.
Тот факт, что за счет установки датчика на (т.е. на или в) вращающуюся поверхность, обеспечиваются средства для создания постоянного воздушного потока над датчиком для обнаружения льда без необходимости для отдельно создаваемого потока, такого как отбираемый воздух, является преимуществом.
В вариантах осуществления изобретения этого пятого аспекта система может дополнительно содержать признаки первого или второго аспектов или их варианты осуществления изобретения.
Краткое описание чертежей
Варианты осуществления изобретения сейчас будут описаны в качестве примера со ссылкой на чертежи, на которых:
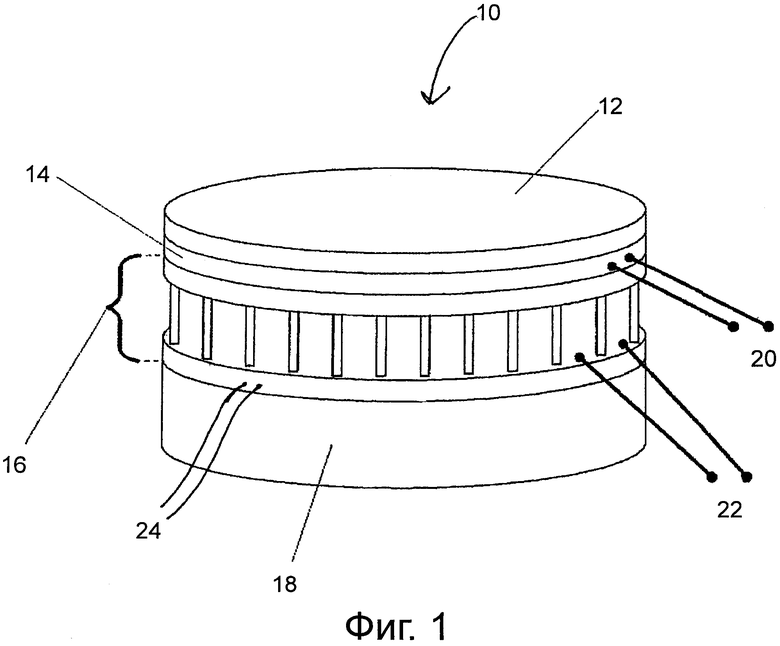
фиг.1 является видом в перспективе воспринимающего устройства, согласно настоящему изобретению;
фиг.2 является диаграммой, показывающей взаимосвязь между воспринимающим устройством фиг.1 и другими компонентами системы, согласно настоящему изобретению;
фиг.3 является схемой последовательности операций воспринимающего устройства фиг.1;
фиг.4 является графиком, показывающим температуру и изменение мощности теплового насоса во времени, в то же время отображающий попытку постоянного температурного режима охлаждения воспринимающего устройства фиг.1;
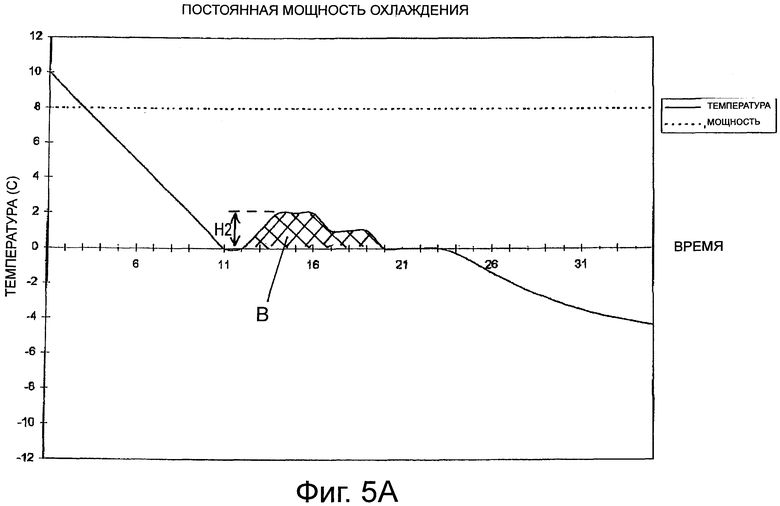
фиг.5А является графиком, показывающим температуру и изменение мощности теплового насоса во времени при постоянной мощности охлаждения воспринимающего устройства фиг.1;
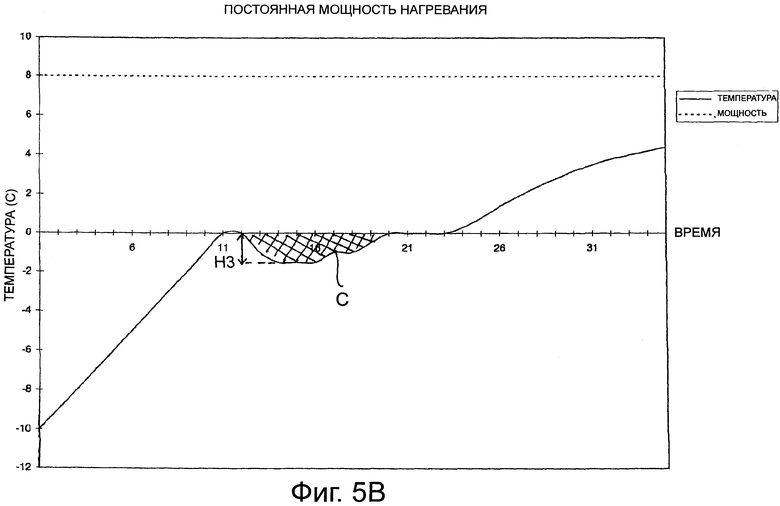
фиг.5В является графиком, показывающим температуру и изменение мощности теплового насоса во времени при постоянной мощности нагревания воспринимающего устройства фиг.1;
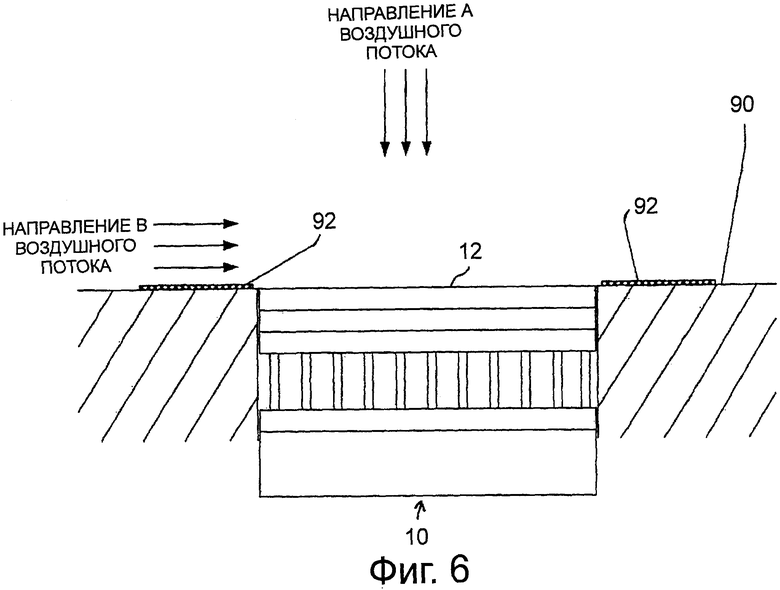
фиг.6 является видом поперечного сечения воспринимающего устройства фиг.1, встроенного во внутреннюю поверхность самолета;
фиг.7 является видом поперечного сечения системы обнаружения льда во вращающейся поверхности самолета.
Осуществление изобретения
На фиг.1 воспринимающее устройство 10 содержит поверхность 12, которая подвергается воздействию окружающей среды. Воспринимающее устройство 10 дополнительно содержит средства 16 для охлаждения или нагревания подвергаемой воздействию поверхности 12. Этим средством является двунаправленный тепловой насос 16, например тепловой насос Пельтье, с электронным управлением от контроллера (не показан) через провода 22 теплового насоса. Теплоотводящий радиатор 18 обеспечивается для использования с тепловым насосом 16, чтобы рассеивать тепло в окружающий воздух или структуру самолета. Термочувствительный элемент 14, образующий часть поверхности 12 или расположенный сразу за ней, выводит показания температуры, показывающие температуру поверхности 12, к системе сбора данных (не показана) через провода 20 для измерения температуры. Внешняя поверхность 12 может быть образована материалом, который обеспечивает физическую защиту для датчика 10 и/или термочувствительного элемента 14, например защиту от абразивного воздействия. Внешняя поверхность 12 может быть частью датчика 10 или термочувствительного элемента 14, или может быть защитным покрытием, размещенным над датчиком 10 или термочувствительным элементом 14. В качестве необязательного варианта может быть использовано множество термочувствительных элементов, обеспечивающих множество показаний температуры, которые могут быть усреднены системой сбора данных. Второй термочувствительный элемент 24 обеспечивается необязательно и используется, чтобы отслеживать характеристику теплового насоса 16.
На фиг.2 система для определения приближения к условиям образования льда содержит воспринимающее устройство 10, как показано на фиг.1. Для электронного управления тепловым насосом 16 обеспечивается контроллер 50, причем управление осуществляется через провода 22 теплового насоса, чтобы нагревать или охлаждать подвергающуюся воздействию поверхность 12. Показания температуры считываются из термочувствительного элемента 14 и выводятся к системе 60 сбора данных через провода 20 для измерения температуры. Обрабатывающее устройство 70 обеспечивается для обработки показаний температуры, передаваемых из системы 60 сбора данных, при этом результаты выводятся к индикатору 80 или к другой системе самолета.
Контроллер 50 во время своей работы осуществляет электронное управление тепловым насосом 16, чтобы нагреть или охладить поверхность 12. Термочувствительный элемент 14 отслеживает температуру, показывающую температуру поверхности 12, а провода 20 для измерения температуры обеспечивают считанными показаниями температуры систему 60 сбора данных. Обрабатывающее устройство 70 обрабатывает показания температуры, поступающие из системы 60 сбора данных таким способом, который будет подробно описан ниже, и обеспечивает индикатор 80 информацией, показывающей вероятность образования льда. Затем обрабатывающее устройство 70 выдает инструкции для контроллера 50 нагревать или охлаждать поверхность, как предназначено для того, чтобы позволить многократное измерение вероятности образования льда.
Когда температура воздуха выше температуры, при которой происходит образование льда на поверхности 12, воспринимающее устройство 10 действует таким образом, чтобы прогнозировать, насколько близко условия текущего полета («преобладающие воздушные условия») находятся к условиям, в которых лед, с определенной вероятностью, образуется на поверхности 12 («поверхности с условиями для образования льда»). В этом случае контроллер 50 выдает инструкции тепловому насосу 16 охладить поверхность 12. При наличии достаточного содержания воды в окружающей атмосфере лед будет постепенно образовываться на охлажденной поверхности 12. Разница между преобладающей температурой воздуха и температурой, при которой происходит образование льда на поверхности 12, является мерой приближения к условиям образования льда. Альтернативно, количество удаленного тепла, которое вызывает образование льда (т.е. величина охлаждения, требуемая для образования льда), обеспечивает качественное измерение, насколько близко преобладающие воздушные условия находятся к условиям, в которых лед образуется на поверхности, т.е. «близость к условиям образования льда». Если преобладающие условия находятся близко к условиям замерзания, в этом случае возможно, что лед может образоваться на части самолета, несмотря на то, что его может не быть на месте расположения датчика. В этих обстоятельствах близость к условиям образования льда определяется из показаний датчика, который будет обеспечивать пилота индикацией, что самолет может быть в опасности из-за образования льда. Это является значительным улучшением по сравнению с традиционным сигнализатором обледенения, который не может обеспечить индикацию, показывающую насколько близко находится самолет к условиям образования льда и являются ли имеющиеся условия потенциально подходящими для образования льда, а также не может отследить ситуацию, когда лед уже может образоваться на самолете, но он не может быть обнаружен. Кроме того, датчик обеспечивает положительное определение, что существуют условия для образования льда, или условия, которые могут быть подходящими для существования льда, независимо от того, присутствует или нет видимая влажность.
После того, как лед аккумулировался на поверхности 12 и выполнено измерение приближения к условиям для образования льда, контроллер 50 управляет тепловым насосом 16 таким образом, чтобы снова нагреть поверхность 12. Поскольку лед тает, то другое измерение приближения к условиям для образования льда выполняется за счет измерения разницы между температурой, показывающей температуру, при которой образуется лед на поверхности 12, и преобладающей температурой воздуха, или за счет измерения величины мощности для нагревания, требуемого для расплавления образовавшегося льда. Когда температура поверхности 12 достигает желаемого значения (например, предшествующая температура поверхности перед охлаждением и последующим нагреванием, или температура окружающего воздуха, или максимальная температура, которая может быть достигнута с максимальной мощностью, приложенной к тепловому насосу, или определенная рабочая температура), процесс охлаждения запускается снова, и процесс определения приближения к условиям для образования льда, как описано выше, повторяется. Это дает возможность системе непрерывно отслеживать и обновлять приближение к условиям для образования льда и интенсивность образования льда.
Когда существуют условия для образования льда, преобладающие условия окружающей среды являются такими, что лед будет формироваться на поверхности без необходимости какого-либо охлаждения с помощью теплового насоса 16. В этих условиях контроллер 50 управляет тепловым насосом 16 таким образом, чтобы нагреть поверхность 12, и величина мощности для нагревания, требуемая для того, чтобы растопить образовавшийся лед, дает измерение количества льда, который был образован. Однако охлаждение все еще используется, чтобы обеспечить более регулярный во времени ответ и дать другое измерение количества льда, который был образован. Эта информация может быть полезна пилоту, который может предпринять действие, чтобы вывести самолет из условий образования льда или обеспечить ввод для запуска антиобледенительной системы.
Фиг.3 является схемой последовательности операций, показывающей типичные шаги, которые следуют в работе воспринимающего устройства 10, как показано на фиг.1, в системе, показанной на фиг.2.
Во время шага S100, с поверхностью 12, или температурой воздуха, которая выше той температуры, при которой лед обычно будет образовываться на поверхности 12, эта поверхность 12 охлаждается за счет работы теплового насоса 16. Это охлаждение является управляемым процессом, и выполняется, например, с помощью теплового насоса 16, работающего с известной или постоянной мощностью, или чтобы обеспечить известную или постоянную скорость уменьшения температуры по времени. В то время как температура поверхности 12 охлаждается, она отслеживается термочувствительным элементом 14 во время шага S102. Охлаждающая мощность ("cooling power"), которая является количеством охлаждения, требуемым для уменьшения температуры с момента запуска (например, температура окружающего воздуха) до температуры, измеренной в этот момент времени, также отслеживается во время шага S102.
Когда температура поверхности 12 достаточно низкая, для того чтобы на ней начал образовываться лед, скрытая теплота будет удалена в точку, где вода изменяет состояние, чтобы образовывать лед. Эта точка называется точкой обледенения ("icing point"), и она характеризуется тем, что в ней требуется продолжительное удаление тепла без какого-либо наблюдаемого общего изменения в температуре.
Фиг.4 показывает изменение в температуре и мощности как функции времени, с тепловым насосом, управляемым таким образом, чтобы попытаться создать постоянный температурный режим охлаждения. Первоначальное охлаждение следует линии Х графика на фиг.4, которая показывает, что когда температура достигает точки, в которой образуется лед (0°С в показанном примере), температура поверхности 12 обычно слегка увеличивается, перед тем как она становится плоской на пологом участке кривой. (Эта ситуация возникает потому, что скорость, при которой вода отдает свою скрытую теплоту при замораживании, первоначально превышает управляемую скорость охлаждения теплового насоса. Но поскольку слой образующегося льда утолщается, это обеспечивает некоторую изоляцию, таким образом скорость, с которой отдается скрытая теплота, уменьшается). Эта область (область «А») между точкой, в которой температура первоначально достигает 0°С, до точки, когда она снова достигает 0°С, представляет удаление скрытой теплоты. Площадь/величина области А обеспечивает отображение интенсивности условий для образования льда. В дальнейшем температура продолжает стабильно падать, как показано с помощью линии Y на графике, по существу с тем же самым углом наклона, который был до точки образования льда. Следует принимать во внимание, что лед необязательно будет начинать образовываться при 0°С, но он может также образовываться при различных температурах, в зависимости от локального давления, воздушного потока и содержания влаги в воздухе. Как показано на фиг.4, если в воздухе нет влаги, то лед не будет образовываться, поэтому линия графика будет проходить прямо через 0°С, следуя линии Z на графике.
Поскольку увеличение и пологий участок кривой в области А на графике температура/время фиг.4 является характеристикой по форме, и значительно отклоняется от приблизительно постоянного или известного угла наклона температуры, наблюдаемого до и после точки образования льда, то обрабатывающее устройство 70 использует эту информацию о температуре, чтобы определить начало процесса образования льда.
Вернемся снова к фиг.3. Если точка образования льда обнаружена во время шага S104, т.е. температура достаточно уменьшилась для образования льда на поверхности, тогда приближение преобладающих воздушных условий к условиям образования льда на поверхности рассчитывается во время шага S106. Близость к условиям образования льда имеет значение, определяемое как разница между первой температурой и температурой, показывающей образование льда. Первая температура может быть преобладающей температурой воздуха. Альтернативно, первая температура может быть температурой поверхности при запуске шага охлаждения.
Кроме того, рассчитывается «потенциал образования льда» ("icing potential"). Он определяется как скорость изменения и направление близости образования льда, и это обеспечивает индикацию или прогнозирование времени, или вероятности того, что самолет испытывает на себе условия образования льда.
Также выполняется измерение «интенсивности образования льда» ("icing severity"), как упоминалось выше, которая рассчитывается из величины подъема температуры (благодаря освобождению скрытой теплоты) во время охлаждения, т.е. 'H1' на фиг.4, или область 'A' под температурной кривой между временем, когда температура первый раз достигает 0°С (или точка образования льда, когда лед образуется первый раз), и когда кривая температуры в следующий раз проходит через 0°С (или точка образования льда).
Если точка образования льда не обнаружена во время шага S104 на фиг.3, т.е. если температура еще не является достаточно низкой для образования льда на поверхности, или если в атмосфере присутствует недостаточно влажности, вместо этого выполняется определение: был ли достигнут заданный минимум температуры во время шага S108 (или состояние максимальной мощности, в котором нет дальнейшего изменения температуры, в то время как тепловой насос продолжает работать с максимальной мощностью). Если это не тот случай, то процесс возвращается к шагу S100, чтобы продолжать охлаждение поверхности 12.
Если во время выполнения шага S104 обнаружена точка образования льда, и в дальнейшем близость образования льда и потенциал образования льда были рассчитаны во время шага S106, или минимальная температура (или максимальное состояние мощности) были достигнуты во время шага S108, то поверхность снова подогревается во время шага S110 с известным или практически постоянным температурным режимом (или известным или практически постоянным режимом мощности). И снова температура поверхности 12 отслеживается термочувствительным элементом 14 во время шага S112. «Мощность для нагревания» ("heating power"), которая является величиной нагревания, требуемой для увеличения температуры от температуры образования льда на поверхности или заданной минимальной температуры, чтобы вернуться к преобладающей температуре воздуха (или максимуму желаемой или достижимой температуры), также отслеживается во время шага S112.
Если лед ранее уже образовался на поверхности 12, то во время этого нагревания поверхности 12 он будет таять. Это является эквивалентом другой обнаруженной точке обледенения, поскольку скрытая теплота способствует таянию льда. Поэтому, если точка обледенения обнаружена во время нагревания, другое измерение близости к образованию льда и потенциала образования льда выполняется во время шага S116. Профиль температуры, наблюдаемый во время нагревания, является обратным по отношению к профилю, наблюдаемому во время охлаждения, и показан на фиг.5В. Количество обеспеченной теплоты показывает количество льда, образованного ранее, и льда, который сейчас удаляется. Однако следует иметь в виду, что во время нагревания возможно такое явление, что как только маленький слой льда, прилегающий к поверхности 12 теплового насоса, растаял, лед, находящийся на вершине, может быть просто сдут потоком. В этом случае количество обеспеченной теплоты не может быть надежным индикатором, за исключением случая, когда позволяется образоваться только маленькому количеству льда, или измеренные значения компенсируются, чтобы предусмотреть это явление. Альтернативно, может быть лучше просто положиться на измерение интенсивности образования льда из цикла охлаждения.
Эти дополнительные измерения используются или как перекрестный контроль, или берется среднее значение измерений охлаждения и нагревания во время шагов S106 и S116. После того, как измерения были произведены, процесс S100 охлаждения запускается снова, для того чтобы получить дополнительные измерения близости образования льда и потенциала образования льда. Процесс охлаждения и нагревания, а также произведенные измерения, как описывалось ранее, выполняются постоянно, пока самолет находится в использовании и требуется обнаружение льда.
Если точка образования льда не обнаружена во время шага S110 нагревания, и температура поверхности 12 достигла максимального заданного значения (например, температуры перед началом охлаждения, или средней температуры окружающего воздуха, или определенной максимальной температуры), или достигается максимальное состояние мощности, в котором нет дальнейшего изменения температуры, тогда процесс охлаждения во время шага S100 запускается снова. Если максимальная температура еще не была достигнута во время шага S118, тогда процесс нагревания во время шага S110 продолжается до тех пор, пока не обнаружится точка образования льда во время шага S114, или пока не будет достигнута максимальная температура во время шага S118.
Фиг.4 также показывает изменение мощности во времени, в то время как предпринимается попытка сохранения постоянного температурного режима охлаждения. В точке образования льда требуется быстрое увеличение мощности охлаждения (или быстрое увеличение мощности нагревателя, если окружающая температура находится ниже 0°С). Этот процесс происходит без значительного среднего изменения в температуре. Это увеличение мощности представляет начало условий образования льда и, следовательно, отображает близость образования льда и потенциала образования льда. Значение увеличения также могло бы быть использовано для обеспечения измерения интенсивности образования льда таким образом, который аналогичен описанному выше способу для случая, когда поверхность подвергалась охлаждению.
Фиг.5А показывает изменение температуры и мощности во времени с охлаждением, выполняемым с известной или практически постоянной мощностью (по сравнению с попыткой создания постоянного температурного режима охлаждения, показанного на фиг.4). Подобное увеличение и пологий участок температурной кривой наблюдается снова как скрытая теплота, освобождаемая с момента начала образования льда. Близость образования льда и потенциал образования льда определяются способом, аналогичным описанному выше для постоянного температурного режима охлаждения. Величина 'H2' подъема температуры, или область В, отображают освобождение скрытой теплоты и могут быть использованы для обеспечения измерения интенсивности образования льда.
Воспринимающее устройство 10 также работает как традиционный сигнализатор обледенения, если лед уже образовался на контролируемой поверхности 12. Если поверхность нагревается, чтобы растопить лед, то скрытая теплота потребуется для фазового изменения, обеспечивая обнаруживаемое обратное движение температуры и/или пологий участок кривой. Фиг.5В показывает изменение температуры во времени для случая, когда поверхность нагревается с известной или практически постоянной мощностью, с обратным движением температуры, показанным как Н3, и областью, находящейся под пологим участком кривой, обозначенной как С. Характеристики этого обратного движения температуры или пологого участка кривой обеспечивают измерение интенсивности образования льда, как описано выше.
На фиг.6 воспринимающее устройство 10 фиг.1 показано встроенным в поверхность 90 самолета. Внешняя поверхность 12 воспринимающего устройства 10, предпочтительно, выровнена и находится на одном уровне с внешней поверхностью 90 самолета, в которую оно встроено. Поверхность 90 самолета обычно является крылом самолета, или его обшивкой, или гондолой двигателя, или частью новой стойки или хвостового оперения, обеспеченных с целью обнаружения и прогнозирования образования льда. Альтернативно, устройство 10 могло бы быть установлено таким образом, что внешняя поверхность 12 выдается или углублена в поверхности 90 самолета. Устройство также могло бы формировать часть структуры, установленной на самолете. Альтернативно, устройство 10 могло бы быть объединено в корпусе с каналом, через который воздух может быть введен в поток (например, используя воздух, отводимый из двигательной системы самолета). Датчик этого типа может быть особенно полезным при низких скоростях воздуха или в том случае, когда самолет (или например, вертолет) зависает в воздухе. Альтернативно, устройство 10 могло бы быть объединено с корпусом, который является подвижным или вращающимся, как часть новой или существующей системы самолета, таким образом, что поток воздуха над устройством 10 поддерживается или создается, чтобы позволить обнаружение льда при низких скоростях воздуха, или при зависании в воздухе (например, устройство устанавливается во вращающейся части головки ротора или лопастей вертолета, например такой части, как секция распределения мощности противообледенительной системы ротора).
Расположение воспринимающего устройства 10 относительно воздушного потока, протекающего вокруг самолета, важно для эффективности системы прогнозирования/обнаружения. Ориентация воспринимающего устройства 10 к воздушному потоку определяет обнаруживаемые условия. Если воспринимающее устройство 10 установлено на переднем крае структуры самолета, воздух протекает в направлении 'A', и поэтому датчик воспринимает условия в точке полного торможения потока воздуха, которая обычно имеет более высокую температуру, чем окружающая температура. Передний край может быть плоским или криволинейным. Если воспринимающее устройство 10 установлено таким образом, что оно взаимодействует с потоком по направлению 'B', то воспринимаемые условия являются такими, как в пределах пограничного слоя воздушного потока, внутри области ламинарного потока. В этом случае воспринимающее устройство 10 устанавливается на плоской поверхности горизонтального (например, верхней или нижней поверхности крыла) или вертикального элемента структуры самолета, который в нормальных условиях будет практически плоским. Воспринимающее устройство 10 также может быть расположено на поверхности, имеющей любую ориентацию между практически вертикальным и горизонтальным положениями, показанными на фиг.6. Подходящее положение и место установки могут быть основаны на характеристиках, относящихся к нарастанию льда на поверхности самолета, которые могут зависеть от локальных характеристик поверхности и ее аэродинамики, помогающих собирать влажность и помогающих льду или влажности сбрасываться с поверхности датчика.
Локальные условия по давлению и температуре могут быть различными в точке торможения потока воздуха и в пограничном слое, поэтому для получения оптимальных характеристик используются два или более воспринимающих устройств 10, расположенных в положениях, определяемых для оптимальных характеристик.
Для предотвращения нарастания льда на окружающих поверхностях, приводящих к закрыванию устройства 10, на поверхности 90 самолета, поблизости от поверхности 12 устройства, может быть обеспечен нагреватель 92. Нагреватель на чертеже показан установленным близко к поверхности 12, но не контактирующим с ней. Разделение нагревателя и устройства выбирается таким образом, чтобы тепло, проводимое от нагревателя в датчик, не создавало помех для работы или точности устройства 10. Альтернативно, или дополнительно, между нагревателем 92 и поверхностью 12 датчика может быть обеспечена область термической изоляции (не показана). Нагреватель 92 и локальная поверхность 90 могут быть обеспечены как часть сборочной единицы, включающей в себя датчик 10.
Системы обнаружения льда, как описано выше, имеют значительные преимущества по сравнению с традиционными системами обнаружения льда, за счет обеспечения информации для пилота самолета о близости условий образования льда, когда самолет пролетает через изменяющиеся условия окружающей среды. Это имеет особую важность, поскольку условия могут вызвать образование льда на определенных местах поверхности самолета без образования льда на специфическом месте расположения традиционного датчика, который является датчиком, и, следовательно, пилот не осознавал бы происходящий процесс образования льда. Однако, как объяснялось выше, расположение датчика является важным, поскольку могут возникнуть различные локальные условия окружающей среды на местах расположения различных поверхностей, например, благодаря локальным вариациям давления.
Пока поддерживается полет самолета или вертолета в направлении вперед, на датчике присутствует постоянный и стабильный воздушный поток, который является желательным, чтобы позволить датчику обнаруживать изменения в окружающей среде, воздействию которой он подвергается. Пока вертолет находится в состоянии зависания в воздухе, скорость движения вертолета вперед больше не обеспечивает такой воздушный поток над датчиком, вследствие чего время реакции и точность будут ухудшаться. Традиционные датчики обычно используют отводимый от двигателя воздух, чтобы поддерживать воздушный поток над датчиком, даже во время зависания в воздухе, и чтобы позволить непрерывное отслеживание измерения датчиком. Использование отводимого от двигателя воздуха является нежелательным, поскольку это отбирает энергию от двигателя, является более сложным при установке, и отводимый воздух по своей сути является горячим, что приуменьшает действенность процесса при попытке измерить лед. По существу, средства для создания постоянного воздушного потока над датчиком для обнаружения льда без необходимости отвода воздуха от двигателя являются преимуществом.
Фиг.7 иллюстрирует систему обнаружения льда для поверхностей 94, 95, которые принудительно вращаются вокруг оси Х-Х. Два датчика 96а и 96b показаны в качестве примера. Каждый из этих датчиков установлен на вращающихся поверхностях 94, 95. Например, поверхность 94 может быть горизонтальной поверхностью части сборочного узла ротора вертолета, в то время как поверхность 95 может быть радиальной направленной наружу облицовочной поверхностью этого сборочного узла ротора. Принципы, описанные ниже, могут быть применены к системе, имеющей только один датчик или множество датчиков.
Датчики 96а и 96b имеют соответствующие поверхности 97а и 97b для воздействия, причем в проиллюстрированном варианте осуществления изобретения поверхности 97а и 97b установлены на одном уровне с вращающимися поверхностями 94, 95. В альтернативном варианте датчики могут быть установлены таким образом, что поверхности 97а и 97b для воздействия выступают над поверхностями 94, 95 или утоплены ниже уровня вращающихся поверхностей 94, 95. Датчики 96а и 96b могут быть установлены таким образом, чтобы представлять поверхности 97а и 97b для воздействия под углом к направлению перемещения, так что вращательное перемещение представляет набегающий «воздушный поток». Поверхности 97а и 97b для воздействия могут быть наклонены под любым углом между положением, когда они параллельны с потоком воздуха и являются перпендикулярными воздушному потоку. Угол может быть выбран таким образом, чтобы оптимизировать эффективность воспринимающей способности, не вызывая чрезмерного сопротивления среды. Поверхности 94, 95 могут быть наклонены таким образом, чтобы представлять датчики 96а и 96b и поверхности 97а и 97b для воздействия под углом к направлению перемещения, для того чтобы вращательное перемещение представляло собой набегающий «воздушный поток». Поверхности 94, 95 могут быть наклонены под любым углом между положением, когда они параллельны с потоком воздуха и являются перпендикулярными воздушному потоку. Угол может быть выбран таким образом, чтобы оптимизировать эффективность воспринимающей способности, не вызывая чрезмерного сопротивления среды.
Каждый из датчиков 96а и 96b включает в себя термочувствительный элемент, такой как термопара или резистивный термометр, который определяет температуру вращающихся поверхностей 97а и 97b, подвергающихся воздействию окружающей среды. Каждый из датчиков 96а и 96b обеспечивает сигнал на соответствующий выход 98а и 98b. Датчики 96а и 96b также могут включать в себя один или более дополнительных термочувствительных элементов, которые отслеживают температуру окружающей среды, в которой находится вращающаяся поверхность. Альтернативно, отдельные датчики могут быть использованы для определения температуры локальной окружающей среды, или это может быть обеспечено другими компонентами системы. Значения температуры (поверхности и окружающей среды) обеспечиваются для процессора, который определяет близость к условиям образования льда, или присутствие этих условий, таким способом, который аналогичен описанному выше. Процессор может формировать часть каждого датчика 96а и 96b, в котором случай сигнала обеспечивается на соответствующий выход 98а и 98b, чтобы отобразить присутствие условий образования льда, или близость к этим условиям на соответствующих вращающихся поверхностях 97а и 97b, подвергающихся воздействию окружающей среды. Альтернативно, обработка может быть выполнена где-то в другом месте (например, в центральном процессоре, который может вращаться или не вращаться вместе с датчиками 96а и 96b). Система обнаружения образования льда может включать в себя любой или все признаки систем обнаружения, описанных выше, со ссылками на фиг.1-6.
Многие другие применения могут получить преимущество от включения в свой состав таких систем обнаружения образования льда, например такие как: ветряные турбины, лопатки ветряных турбин, впускной воздушный канал для двигателя, такого как реактивная турбина для генерирования электроэнергии, система также может устанавливаться на беспилотный летательный аппарат, или использоваться для любого другого применения, когда определение присутствия или близости условий образования льда было бы полезным. Устройство и средства обработки также могут быть использованы, как описано выше, чтобы определить уровень влажности или содержание влаги в окружающей среде.




Группа изобретений относится к системе и способам для обнаружения льда на самолете. Способ определения близости условий окружающей среды к условиям для образования льда содержит следующие этапы: обеспечение датчика, имеющего воспринимающую поверхность для воздействия на нее окружающей среды, и средства в виде теплового насоса для охлаждения и/или нагревания поверхности, функционирование теплового насоса для охлаждения или нагревания поверхности, отслеживание температуры поверхности, определение температуры, показывающей образование льда, определение температуры окружающей среды, представляющей температуру окружающей среды, воздействию которой подвергается поверхность датчика. По полученным значениям определяют значение разницы между температурой окружающей среды и температурой, показывающей образование льда, при этом вышеуказанное значение представляет близость условий окружающей среды, воздействию которой подвергается поверхность, к условиям для образования льда. Во втором варианте способа дополнительно определяют значение мощности, требуемой для нагревания или охлаждения поверхности, в соответствии с температурой, показывающей образование льда. Система включает в себя датчик, средства (16) в виде электрического теплового насоса для охлаждения и/или нагревания поверхности (12) и термочувствительный элемент (14) для обеспечения сигнала, представляющего температуру поверхности (12), средства для определения окружающей среды и процессор. Достигается повышение эффективности обнаружения образования льда на поверхностях самолета. 3 н. и 30 з.п. ф-лы, 8 ил.
1. Способ определения близости условий окружающей среды к условиям для образования льда, содержащий следующие этапы:
- обеспечение датчика, имеющего воспринимающую поверхность для воздействия на нее окружающей среды, и средства в виде теплового насоса для охлаждения и/или нагревания поверхности;
- функционирование теплового насоса для охлаждения или нагревания поверхности;
- отслеживание температуры поверхности;
- определение температуры, показывающей образование льда;
- определение температуры окружающей среды, представляющей температуру окружающей среды, воздействию которой подвергается поверхность датчика; и
- определение значения разницы между температурой окружающей среды и температурой, показывающей образование льда, при этом вышеуказанное значение представляет близость условий окружающей среды, воздействию которой подвергается поверхность, к условиям для образования льда.
2. Способ по п.1, в котором температура окружающей среды является преобладающей температурой воздуха.
3. Способ по п.2, в котором температура окружающей среды определяется из температуры поверхности, когда не происходит ее охлаждение или нагревание, или определяется из независимого датчика температуры.
4. Способ по любому из пп.1-3, дополнительно содержащий определение отображения времени, или вероятности возникновения условий для образования льда.
5. Способ по п.4, в котором потенциал образования льда определяется с помощью измерения скорости изменения и направления приближения к условиям для образования льда.
6. Способ по любому из пп.1-3, в котором охлаждение или нагревание поверхности выполняется с известной или практически постоянной мощностью.
7. Способ по любому из пп.1-3, в котором температура, показывающая образование льда, определяется с помощью измерения изменения температуры во времени, и обнаружения пологого участка кривой, или изменения в направлении при изменении температуры со временем, являющегося результатом скрытой теплоты при образовании льда.
8. Способ по любому из пп.1-3, в котором шаг охлаждения или нагревания поверхности содержит управляемое охлаждение или нагревание, с тем чтобы попытаться обеспечить практически постоянную скорость изменения температуры на единицу времени.
9. Способ по п.8, в котором температура, показывающая образование льда, определяется с помощью отслеживания мощности для охлаждения или нагревания во времени, чтобы определить температуру, при которой происходит изменение в мощности, являющееся результатом скрытой теплоты при образовании льда.
10. Способ по любому из пп.1-3, содержащий попеременное охлаждение или нагревание поверхности.
11. Способ по п.10, в котором близость к условиям для образования льда определяется в обоих случаях: когда поверхность нагревается и когда она охлаждается.
12. Способ по п.10, содержащий постоянно повторяющиеся попеременные нагревание и охлаждение.
13. Способ по любому из пп.1-3, дополнительно содержащий определение интенсивности образования льда.
14. Способ по п.13, в котором определение интенсивности образования льда содержит измерение величины увеличения по температуре или продолжительности пологого участка кривой температуры, когда образование льда происходит во время охлаждения, или измерение величины уменьшения по температуре или продолжительности пологого участка кривой температуры, когда таяние льда происходит во время нагревания.
15. Способ определения близости условий окружающей среды к условиям для образования льда, содержащий следующие этапы:
- обеспечение датчика, имеющего воспринимающую поверхность для воздействия на нее окружающей среды, и средства в виде электрического теплового насоса для нагревания и/или охлаждения поверхности;
- функционирование теплового насоса для охлаждения или нагревания поверхности;
- отслеживание температуры поверхности;
- определение значения мощности, требуемой для охлаждения или нагревания поверхности через температуру, показывающую образование льда; и
- определение из отслеживаемой температуры и значения мощности, требуемой для нагревания или охлаждения, величины количества удаляемой теплоты, которая вызывает образование обледенения, или количества требуемой теплоты, чтобы расплавить уже образованный лед, причем вышеуказанное значение представляет близость условий окружающей среды, воздействию которой подвергается поверхность, к условиям для образования льда.
16. Способ по п.15, дополнительно содержащий определение отображения времени, или вероятности возникновения условий для образования льда.
17. Способ по п.16, в котором потенциал образования льда определяется с помощью измерения скорости изменения и направления приближения к условиям для образования льда.
18. Способ по любому из пп.15-17, в котором охлаждение или нагревание поверхности выполняется с известной или практически постоянной мощностью.
19. Способ по любому из пп.15-17, в котором температура, показывающая образование льда, определяется с помощью измерения изменения температуры во времени и обнаружения пологого участка кривой, или изменения в направлении при изменении температуры со временем, являющегося результатом скрытой теплоты при образовании льда.
20. Способ по любому из пп.15-17, в котором шаг охлаждения или нагревания поверхности содержит управляемое охлаждение или нагревание, с тем чтобы попытаться обеспечить практически постоянную скорость изменения температуры на единицу времени.
21. Способ по п.20, в котором температура, показывающая образование льда, определяется с помощью отслеживания мощности для охлаждения или нагревания во времени, чтобы определить температуру, при которой происходит изменение в мощности, являющееся результатом скрытой теплоты при образовании льда.
22. Способ по любому из пп.15-17, содержащий попеременное охлаждение или нагревание поверхности.
23. Способ по п.22, в котором близость к условиям для образования льда определяется в обоих случаях: когда поверхность нагревается, и когда она охлаждается.
24. Способ по п.22, содержащий постоянно повторяющиеся попеременные нагревание и охлаждение.
25. Способ по любому из пп.15-17, дополнительно содержащий определение интенсивности образования льда.
26. Способ по п.25, в котором определение интенсивности образования льда содержит измерение величины увеличения по температуре или продолжительности пологого участка кривой температуры, когда образование льда происходит во время охлаждения, или измерение величины уменьшения по температуре или продолжительности пологого участка кривой температуры, когда таяние льда происходит во время нагревания.
27. Система с датчиками для определения близости условий окружающей среды к условиям для образования льда, при этом система содержит:
- датчик, имеющий воспринимающую поверхность, предназначенную для воздействия на нее окружающей среды, средства в виде электрического теплового насоса для охлаждения и/или нагревания поверхности и термочувствительный элемент для обеспечения сигнала, представляющего температуру поверхности;
- средства для определения температуры окружающей среды; и
- процессор, сконфигурированный для определения близости условий окружающей среды, которые воздействуют на поверхность, в соответствии со способом по любому из пп.1-26.
28. Система с датчиками по п.27, в которой тепловой насос является двунаправленным тепловым насосом, например тепловым насосом Пельтье.
29. Система с датчиками по п.27, конфигурируемая для использования на самолете, в которой поверхность датчика находится заподлицо с поверхностью самолета, такой как обшивка самолета, крыло или гондола двигателя, или в которой поверхность датчика выступает из поверхности самолета или утоплена в ней, или в которой поверхность датчика образует часть структуры, установленной на самолете, такой как выступающая опорная часть, или стойка, или хвостовое оперение самолета.
30. Система с датчиками по п.29, в которой поверхность датчика находится, по существу, параллельно направлению потока воздуха, обтекающего самолет, или в которой поверхность датчика находится, по существу, перпендикулярно направлению потока воздуха, обтекающего самолет, или в которой поверхность датчика ориентирована под углом к направлению потока воздуха, обтекающего самолет.
31. Система с датчиками по по п.27, содержащая множество датчиков, каждый из которых имеет поверхность, открытую для воздействия окружающей среды, в которой процессор определяет близость условий для образования льда из обнаруженных температур, и по дополнительному выбору, из величины мощности для охлаждения или нагревания для каждого из множества датчиков.
32. Система с датчиками по п.27, образующая часть системы обнаружения льда, содержащая:
- вращающуюся поверхность, в которой
- датчик является первым датчиком, установленным на вращающейся поверхности, при этом средства для определения температуры окружающей среды содержат второй датчик для определения температуры окружающей среды, в которой поверхность вращается.
33. Система с датчиками по п.32, в которой вращающаяся поверхность является поверхностью ротора, сборочного узла ротора, пропеллера или лопатки турбины.
| FR 2914906 A1, 17.10.2008; |

