Изобретение относится к железнодорожному транспорту, а именно к способу регулирования электрической передачи тепловозов с автономным тепловым двигателем, тяговым генератором переменного тока, управляемыми выпрямителями и тяговыми электродвигателями постоянного тока.
Известен способ регулирования электрической передачи тепловозов путем регулирования напряжения тягового генератора, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки двигателя, соответствующее текущему значению его частоты вращения, измеряют напряжение тягового генератора, сравнивают его с величиной уставки и по величине рассогласования изменяют ток возбуждения генератора, задают положение дозирующего органа топливоподачи регулятора пропорционально заданной частоте вращения, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения тягового генератора (SU, авторское свидетельство №925693, кл. B60L 11/02, опубл. 1982 г.).
Недостатком известного способа является то, что напряжение тягового генератора при появлении боксования хотя бы у одного из тяговых электродвигателей увеличивается с темпом, определяемым интегратором задания напряжения тягового генератора. Это объясняется тем, что при появлении режима боксования хотя бы у одной из колесных пар подводимая к тяговому электродвигателю боксующей колесной пары мощность снижается и появляется несоответствие между свободной мощностью теплового двигателя и мощностью, реализумой тяговой передачей, что приводит к рассогласованию положения дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя с заданным.
Другим недостатком известного способа является то, что напряжение тягового генератора подается на все тяговые электродвигатели одинакового уровня независимо от того, принадлежит ли тяговый электродвигатель боксующей колесной паре или принадлежит небоксующей колесной паре.
Поддержание постоянным напряжения тягового генератора, которое подводится к электродвигателям, не исключает возможность как одновременного боксования всех колесных пар тепловоза, так и нескольких, и приводит к тому, что мощность, подводимая к тяговым электродвигателям, уменьшается, а тяговые электродвигатели боксующих колесных пар могут продолжать боксовать, работая по естественной мягкой механической характеристике.
Известен способ регулирования электрической передачи, принятый за прототип, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению частоты вращения теплового двигателя, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени, устанавливают ток возбуждения синхронного генератора, причем устанавливают предельный для заданной частоты вращения теплового двигателя постоянный ток возбуждения синхронного генератора, интегрируют по времени величину рассогласования измеренного положения дозирующего органа топливоподачи с заданным положением с постоянными времени, величину которых устанавливают дискретно в зависимости от положительного или отрицательного знака величины рассогласования, принимают за уставку частоты вращения тяговых электродвигателей результат интегрирования, измеряют частоту вращения каждого тягового электродвигателя, сравнивают частоту вращения каждого тягового электродвигателя отдельно с уставкой частоты вращения тяговых электродвигателей, результат сравнения усиливают и принимают за величину уставки напряжения выхода управляемого выпрямителя тягового электродвигателя, подают на управляющий вход управляемого выпрямителя тягового электродвигателя и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя, которое подают на вход тягового электродвигателя (RU, патент на изобретение №2130389 кл. B60L 1/06, опубл. 1999 г.).
Недостатком является то, что на работу системы управления электропередачей, реализованной по данному способу, оказывает значительное влияние надежность датчиков частоты вращения, и в случае выхода из строя датчиков частоты вращения тягового электродвигателя система становится неработоспособной, что снижает противобоксовочные свойства тепловоза.
Техническим результатом изобретения является повышение надежности и повышение противобоксовочных свойств тепловоза в условиях ухудшенного сцепления.
Указанный технический результат достигается тем, что в способе регулирования электрической передачи тепловоза, заключающемся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению частоты вращения теплового двигателя, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени, устанавливают постоянный ток возбуждения синхронного генератора, ток возбуждения синхронного генератора устанавливают предельным для заданной частоты вращения теплового двигателя, величину рассогласования измеренного положения дозирующего органа топливоподачи с заданным положением интегрируют по времени, величину постоянной времени интегрирования устанавливают дискретно, в зависимости от положительного или отрицательного знака сигнала величины рассогласования, результат интегрирования принимают за соответствующую уставку частоты вращения каждого тягового электродвигателя, измеряют частоту вращения каждого тягового электродвигателя, осуществляют фазовое регулирование выходных напряжений управляемых выпрямителей, которые подают на входы тяговых электродвигателей, измеряют напряжения, токи якорей и обмоток возбуждения всех тяговых электродвигателей постоянного тока локомотива, определяют по величинам токов якорей и токов обмоток возбуждения тяговых электродвигателей постоянного тока величины магнитных потоков, по величинам измеренных напряжений на тяговых электродвигателях, определенных значений магнитных потоков и измеренных значений токов якорей тяговых электродвигателей постоянного тока вычисляют расчетные значения частот вращения всех тяговых электродвигателей постоянного тока, сравнивают их попарно с величинами измеренных частот вращения всех тяговых электродвигателей постоянного тока, выделяют из них соответственно максимальные значения, сравнивают максимальные значения для каждого тягового электродвигателя с уставкой частоты вращения тяговых электродвигателей, результаты сравнения усиливают и принимают за величины уставок выходного напряжения управляемых выпрямителей. Вычисляют отклонения всех расчетных и измеренных частот вращения тяговых электродвигателей постоянного тока, сравнивают их с пороговым значением и в случае превышения порогового значения принимают решение о неисправности соответствующего датчика частоты вращения или тягового электродвигателя постоянного тока.
На фиг.1 представлена блок-схема устройства, реализующего способ. На фиг.2 представлены внешние вольт-амперные характеристики тягового синхронного генератора и управляемого выпрямителя одного из тяговых электродвигателей, Ud=f(Id), на которой показаны: кривая "а" - внешняя вольт-амперная характеристика тягового синхронного генератора при постоянном, предельном для заданной частоты вращения теплового двигателя токе возбуждения, приведенная к выходу управляемого выпрямителя одного из тяговых электродвигателей, кривая "д" - внешняя вольт-амперная характеристика постоянной мощности синхронного генератора при постоянной частоте вращения теплового двигателя, приведенная к выходу управляемого выпрямителя одного из тяговых электродвигателей; кривые "б", "в", "г" - внешние вольт-амперные характеристики управляемого выпрямителя одного из тяговых электродвигателей при различных частотах вращения тягового электродвигателя.
Устройство (фиг.1) для реализации предлагаемого способа состоит из теплового двигателя 1, например дизеля, с регулятором 2 частоты вращения и нагрузки дизеля, с датчиком 3 положения дозирующего органа топливоподачи (на чертеже не показан), например датчиком положения рейки топливных насосов высокого давления дизеля. Дизель 1 связан с электрической передачей, в которую входит нижеперечисленное электрооборудование, дизель 1 механически соединен с синхронным тяговым генератором 4. Силовой выход синхронного генератора 4 подключен к силовым входам управляемых выпрямителей 5 и 6. Силовой выход управляемого выпрямителя 5 подключен на вход тягового электродвигателя 7, силовой выход управляемого выпрямителя 6 подключен на силовой вход тягового электродвигателя 8. Синхронный генератор 4 соединен с блоком 9 управления током возбуждения синхронного генератора 4. Тяговый электродвигатель 7 соединен с датчиком 10 частоты вращения. Тяговый электродвигатель 8 соединен с датчиком 11 частоты вращения. Выход задатчика 12 частоты вращения дизеля, например, многопозиционного контроллера машиниста тепловоза, соединен с входом регулятора 2 частоты вращения и нагрузки дизеля 1, с входом функционального преобразователя 13, формирующего по заданной частоте вращения дизеля 1 задание положения дозирующего органа топливоподачи и задание тока возбуждения синхронного генератора 4. Первый выход функционального преобразователя 13 соединен с блоком 9 управления током возбуждения синхронного генератора 4. Второй выход функционального преобразователя 13 соединен с одним из входов блока 14 измерения рассогласования положения дозирующего органа топливоподачи, другой вход блока 14 соединен с выходом датчика 3 положения дозирующего органа топливоподачи. Выход блока 14 соединен с входом блока 15 интегрирования величины рассогласования по времени, выход которого соединен с первыми входами сумматоров 16 и 17. Выход сумматора 16 подключен через усилитель 18 на управляющий вход управляемого выпрямителя 5, а выход сумматора 17 через усилитель 19 подключен на управляющий вход управляемого выпрямителя 6. Датчики напряжения 20 и 21 подключены к якорям тяговых электродвигателей 7 и 8 постоянного тока соответственно, в цепи якорей и обмоток возбуждения тяговых электродвигателей 7 и 8 постоянного тока установлены датчики 22 и 23 соответственно тока якорей и обмоток возбуждения тяговых электродвигателей 7 и 8 постоянного тока. Первые выходы датчиков 22 и 23 токов якорей и обмоток возбуждения подключены к входам функциональных преобразователей 24 и 25 соответственно. Выходы датчиков напряжения 20 и 21, вторые выходы датчиков 22 и 23 тока якорей и обмоток возбуждения, выходы функциональных преобразователей 24 и 25 подключены к входам блоков расчета скорости 26 и 27 соответственно. Выходы блоков 26 и 27 расчета скоростей соединены с первыми входами блоков 28 и 29 выделения максимального сигнала, вторые входы которых подключены к выходам датчиков 10 и 11 частоты вращения тяговых электродвигателей 7 и 8 постоянного тока соответственно. Выходы блоков 28 и 29 выделения максимального сигнала соединены с вторыми входами сумматоров 16 и 17 соответственно.
Число пар "управляемый выпрямитель и тяговый электродвигатель", например 5 и 7 или 6 и 8, пар "сумматор и усилитель", например 16 и 18 или 17 и 19, пар «функциональный преобразователь и блок расчета скорости», например 24 и 26 или 25 и 27, пар «датчик частоты вращения и блок выделения максимального сигнала», например 10 и 28 или 11 и 29, датчиков тока якоря и обмоток возбуждения, например 22 и 23, в электрической тяговой передаче равно числу движущих колесных пар тепловоза, например двум, как в рассматриваемом устройстве на фиг.1. Датчик 10 частоты вращения, блок 28 выделения максимального сигнала, сумматор 16 и усилитель 18 образуют контур регулирования частоты вращения тягового электродвигателя 7, датчик 11 частоты вращения, блок 29 выделения максимального сигнала, сумматор 17 и усилитель 19 образуют контур регулирования частоты вращения тягового электродвигателя 8.
Способ осуществляется следующим образом.
Задатчиком 12 частоты вращения дизеля задают частоту вращения дизеля 1, который приводит во вращение синхронный тяговый генератор 4. На выходе задатчика 12 действует кодовый сигнал, пропорциональный заданной частоте вращения дизеля 1, который поступает на вход регулятора 2 частоты вращения и нагрузки дизеля 1, на вход функционального преобразователя 13. Регулятор 2 частоты вращения и нагрузки дизеля удерживает частоту вращения дизеля 1 пропорционально кодовому сигналу задания задатчика 12.
Датчиком 3 измеряют положение дозирующего органа топливоподачи регулятора 2 частоты и нагрузки дизеля 1, соответствующее текущему значению частоты вращения дизеля 1. Выходной сигнал "Lu" датчика 3, пропорциональный положению органа топливоподачи, поступает на первый вход блока 14 измерения рассогласования.
Функциональным преобразователем 13 устанавливают:
1. На первом выходе - предельный постоянный ток возбуждения синхронного тягового генератора 4 для заданной частоты вращения дизеля 1, для чего преобразуют поступающий на вход функционального преобразователя 13 кодовый сигнал, пропорциональный заданной частоте вращения дизеля 1 в сигнал задания тока возбуждения синхронного генератора 4, который подают на вход блока 9 управления током возбуждения синхронного генератора 4.
2. На втором выходе - положение дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки дизеля 1 пропорционально заданной частоте вращения дизеля 1, для чего в функциональном преобразователе 13 преобразуют код заданной частоты, поступающий на вход функционального преобразователя 13 с выхода задатчика 12 в сигнал "L3" задания положения дозирующего органа топливоподачи, который с первого выхода функционального преобразователя 13 поступает на второй вход блока 14 измерения рассогласования. Сигнал "L3" заданного положения дозирующего органа топливоподачи и сигнал "Lu" измеренного датчиком 3 положения дозирующего органа топливоподачи в блоке 14 сравнивают по величине и знаку отклонения. Величина рассогласования ΔL=±(L3-Lu) с выхода блока 14 измерения рассогласования поступает на вход блока 15 интегрирования, где ее интегрируют по времени.
Блок 9 управления током возбуждения синхронного генератора 4 устанавливает постоянный ток возбуждения синхронного генератора 4. Тяговый генератор 4 возбуждается, и на его выходе действует напряжение переменного тока.
Величина рассогласования ΔL измеренного положения дозирующего органа топливоподачи с заданным положением с выхода блока 14 измерения рассогласования поступает на вход блока интегрирования 15, где его интегрируют по времени, а величину постоянной времени интегрирования в блоке 15 устанавливают дискретно, в зависимости от положительного или отрицательного знака сигнала величины рассогласования. Если сигнал рассогласования ΔL>0 (положительный), то постоянную времени интегрирования устанавливают одной величины, а если сигнал рассогласования ΔL<0 (отрицательный), то постоянную времени интегрирования устанавливают другой, меньшей величины. Результат интегрирования - сигнал выхода блока 15 интегрирования - принимают за соответствующую уставку частоты вращения каждого тягового электродвигателя 7 и 8 и подают на первые входы сумматоров 16 и 17.
Датчиками 10 и 11 частоты вращения тяговых электродвигателей 7 и 8 измеряют частоту вращения каждого тягового электродвигателя. Сигналы с выходов датчиков 10 и 11 частоты, пропорциональные частотам вращения тяговых электродвигателей 7 и 8, подают на первые входы блоков 28 и 29 выделения максимального сигнала. Измеряют напряжения, токи якорей и обмоток возбуждения всех тяговых электродвигателей 7 и 8 постоянного тока локомотива и определяют по величинам измеренных значений токов якорей и токов возбуждения тяговых электродвигателей постоянного тока величины магнитных потоков, для чего датчики 20 и 21 напряжения тяговых электродвигателей 7 и 8 постоянного тока своими выходами подключены к первым входам блоков 26 и 27 расчета скоростей, ко вторым и третьим входам блоков 26 и 27 расчета скоростей с выходов датчиков 22 и 23 подаются сигналы, пропорциональные току якорей тяговых электродвигателей 7 и 8 постоянного тока, и с выходов функциональных преобразователей 24 и 25 пропорциональные их магнитному потоку.
По величинам измеренных напряжений на тяговых электродвигателях 7 и 8, определенных значений магнитных потоков и измеренных значений токов якорей тяговых электродвигателей постоянного тока в блоках 26 и 27 расчета скорости вычисляют расчетные значения частот вращения всех тяговых электродвигателей 7 и 8 постоянного тока в соответствии с выражением:
где:
Jя - измеренное датчиком тока 22 или 23 значение тока якоря тягового электродвигателя постоянного тока;
Uдв - напряжение тягового электродвигателя 7 или 8, измеренное датчиком 20 или 21 напряжения;
СФ - магнитный поток тягового электродвигателя постоянного тока, определенный для измеренных значений тока якоря Jя и тока возбуждения Jв тяговых электродвигателей постоянного тока по известной для тягового электродвигателя постоянного тока кривой намагничивания СФ=f(Jв,Jя);
∑R - суммарное сопротивление цепи тягового электродвигателя постоянного тока;
nдв - вычисленное значение частоты вращения тягового электродвигателя постоянного тока.
В блоках 28 и 29 выделения максимального сигнала сравнивают попарно величины измеренных и расчетных частот вращения тяговых электродвигателей 7 и 8 постоянного тока, выделяют из них соответственно максимальные значения, сравнивают максимальные значения для каждого тягового электродвигателя с уставкой частоты вращения тяговых электродвигателей, для чего максимальное значение с выхода блоков 28 и 29 выделения максимального сигнала подают на вторые входы сумматоров 16 и 17, где сравнивают с сигналом уставки частоты вращения тяговых электродвигателей 7 и 8, полученным в блоке 15 интегрирования, результаты сравнения с выходов сумматоров 16 и 17 подают на входы усилителей 18 и 19. Результаты сравнения в усилителях 18 и 19 усиливают и принимают за величину уставок выходного напряжения управляемых выпрямителей 5 и 6, подают сигналы на управляющие входы управляемых выпрямителей 5 и 6 и по этим сигналам осуществляют фазовое регулирование выходного напряжения управляемых выпрямителей 5 и 6, которое подают на входы тяговых электродвигателей 7 и 8 постоянного тока. Тяговые электродвигатели 7 и 8 запускают, и их частоты вращения устанавливают близкими к заданной частоте вращения.
Использование максимального сигнала с выхода блоков 28 и 29 из двух: сигнала с датчиков 10, 11 частоты вращения и сигнала с блоков расчета скорости 26, 27 повышает надежность электрической передачи за счет дублирования канала обратной связи по частоте вращения тяговых электродвигателей 7, 8. При значительном расхождении измеренных значений частоты вращения от датчиков 10, 11 частоты вращения с расчетными значениями от блоков 26, 27 возможно сделать вывод о неисправности датчика 10, 11 частоты вращения или же о неисправности тягового электродвигателя постоянного тока 7, 8, что повышает противобоксовочные свойства тепловоза в целом.
В блоках 28 и 29 выделения максимального сигнала вычисляют отклонения всех расчетных частот вращения тяговых электродвигателей постоянного тока 7 и 8 и измеренных частот вращения тяговых электродвигателей постоянного тока 7 и 8. Вычисленное отклонение сравнивают с пороговым значением, и в случае превышения отклонения порогового значения принимают решение о неисправности соответствующего датчика 10 или 11 частоты вращения тягового электродвигателя постоянного тока 7 или 8.
Механические переходные процессы, обусловленные весом поезда и изменением профиля, на котором работает тепловоз, совершаются с значительной инерцией, обусловленной наличием больших инерционных масс поезда. Электрические процессы в электрической передаче в таких режимах работы тепловоза по отношению к механическим процессам следует рассматривать как статические.
В режимах трогания поезда, сопровождающихся увеличением частоты вращения и мощности дизеля 1, ускорение движения поезда зависит от приемистости дизеля и тягового усилия, развиваемого тепловозом в этих режимах:

где 

F0 - тяговое усилие тепловоза 24-40 тс.
Численное значение ускорения движения поезда в упомянутых режимах составляет 0,05-0,4 м/с2.
Если окружное ускорение колесной пары тепловоза превышает 0,45-0,5 м/с2, то это ускорение вызвано режимом боксования [Минов А.К. "Повышение тяговых свойств электровозов и тепловозов с электрической передачей". М., Транспорт, 1965 г., с.229].
Для выделения процессов боксования колесных пар при положительном отклонении (ΔL>0) величины рассогласования заданного и измеренного датчиком 3 положения дозирующего органа топливоподачи дизеля устанавливают постоянную времени и интегрирования величины рассогласования такой величины, чтобы результат интегрирования, принятый за уставку частоты вращения тяговых электродвигателей 7 и 8, изменялся в пересчете на окружное ускорение колесной пары, не превышая 0,5 м/с2.
При медленно изменяющемся задании на частоту вращения тяговых электродвигателей 7 и 8 на выходе каждого управляемого выпрямителя 5 и 6 формируется поле элементарных вольт-амперных характеристик (фиг.2, кривые «б», «в» и «г») для постоянных частот вращения тягового электродвигателя 7 или 8. Это поле характеристик ограничено естественной внешней вольт-амперной характеристикой тягового генератора 4 при постоянном токе его возбуждения Ud=f(Id) и постоянной частоте вращения дизеля 1 (фиг.2, кривая "а"). Кривую "а" (фиг.2) располагают выше постоянной мощности (кривая "д") для определенной частоты вращения дизеля 1 с целью расширения диапазона регулирования выходного напряжения управляемых выпрямителей 5 и 6. По достижении, например, частоты вращения тягового электродвигателя 7 или 8 ω=ω1 управляемые выпрямители 5 и 6 формируют вольт-амперную характеристику "б" (фиг.2). Ток нагрузки Id тяговых электродвигателей 7 и 8, определяемой весом поезда и величиной уклона на элементе профиля, на котором работает тепловоз, достиг, например, значения Id1, а уровень подводимой мощности к тяговым электродвигателям 7 и 8 достиг значения полной свободной мощности дизеля 1, что соответствует точке К на вольт-амперной характеристике постоянной мощности, кривая "д" (фиг.2). Измеренное датчиком 3 положение дозирующего органа в этом случае оказывается равным заданному положению. Выход блока 14 измерения рассогласования положения дозирующего органа топливоподачи равен нулю. На выходе блока 15 интегрирования действует постоянный сигнал задания частоты вращения тяговых электродвигателей 7 и 8. Частота вращения тяговых электродвигателей 7 и 8 остается постоянной, и в системе наступает режим равновесия. Мощность, отбираемая на тягу, равна свободной мощности дизеля 1.
При переходе перелома профиля пути ток тяговых электродвигателей 7 и 8 может принимать значение, например, Id2 при увеличении подъема или, например, Id3 при уменьшении подъема. Если ток тяговых электродвигателей 7 и 8 увеличивается при неизменном значении уставки частоты вращения тяговых электродвигателей 7 и 8, положение рабочей точки по кривой "б" (фиг.2) сместится в положение Л и выйдет в зону перегрузки тягового генератора 4. Мощность на тягу превышает свободную мощность дизеля 1. Положение дозирующего органа топливоподачи превышает заданное значение. На выходе блока 14 измерения рассогласования положения дозирующего органа топливоподачи появляется отрицательный сигнал рассогласования (ΔL<0), который поступает на вход блока 15 интегрирования. При отрицательном значении величины рассогласования заданного и измеренного положения дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки дизеля 1 дискретно устанавливают постоянную времени интегрирования в блоке 15 интегрирования такой величины, чтобы результат интегрирования, принятый за уставку частоты вращения тяговых электродвигателей 7 и 8, изменялся с интенсивностью в пересчете на окружное замедление колесной пары, равной 0,7 м/с2.
Блок 15 интегрирования с ускоренным темпом устанавливает выходной сигнал, который принимают за новую уставку задания частоты вращения тяговых электродвигателей 7 и 8. В сумматорах 16 и 17 находят отклонения заданной частоты вращения тяговых электродвигателей 7 и 8 с расчетными или фактическими значениями частот вращения тяговых электродвигателей 7 и 8, отклонения усиливают в усилителях 18 и 19 и принимают за новую уставку выходного напряжения управляемых выпрямителей 5 и 6. Управляемые выпрямители 5 и 6 работают на работу по вольт-амперной характеристике (кривая "в" фиг.2). Частота вращения тяговых электродвигателей 7 и 8, поддерживаемая контурами регулирования частоты вращения, уменьшается. Равновесие в системе наступит в точке Е, когда напряжение Ud на тяговых электродвигателях 7 и 8 станет равным Ud2 при токе Id2, а мощность, отбираемая тяговым генератором 4 от дизеля 1, станет равной свободной мощности дизеля 1. Если ток тяговых электродвигателей 7 и 8 уменьшается и положение рабочей точки по кривой "б" (фиг.2) смещается в положение С и выходит в зону недоиспользования свободной мощности дизеля 1, то мощность, отбираемая на тягу, становится меньше свободной мощности дизеля 1. Положение дозирующего органа топливоподачи, измеренное датчиком 3, не достигает заданного. На выходе блока 14 рассогласования положения дозирующего органа топливоподачи появляется положительный сигнал рассогласования (ΔL>0), который поступает на вход блока 15 интегрирования, который увеличивает задание частоты вращения тяговых электродвигателей. Частота вращения тяговых электродвигателей 7 и 8, поддерживаемая контурами регулирования частоты вращения, увеличивается, равновесие в системе наступит в точке М, когда напряжение Ud на тяговых электродвигателях 7 и 8 станет равным Ud3 при токе Id3, а мощность, отбираемая тяговым генератором 4, работающим на управляемые выпрямители 5 и 6, станет равной свободной мощности дизеля. Управляемые выпрямители 5 и 6 работают на работу по вольт-амперной характеристике (кривая "г" фиг.2). Аналогично устанавливается равновесное состояние системы передачи мощности от дизеля 1 к тяговым электродвигателям 7 и 8 при изменении частоты вращения вала дизеля 1.
Способ регулирования электрической передачи при одиночном боксовании колесной пары, связанной, например, с тяговым электродвигателем 8, осуществляется следующим образом. Перед возникновением режима боксования колесной пары, связанной с тяговым электродвигателем 8, электрическая передача находилась в равновесном состоянии, а тяговые электродвигатели 7 и 8 работали, например, по характеристике - кривая "б" в точке К (фиг.2). В силу изменения условий по сцеплению колесо-рельс колесная пара тягового электродвигателя 8 начинает приобретать избыточную скорость скольжения. Частота вращения электродвигателя 8 из-за возникшего режима боксования колесной пары увеличивается с ускорением, приведенным к скорости движения, превышающим 0,5 м/с2 с одновременным нарушением равновесия в электрической передаче. Свободная мощность дизеля 1 становится больше мощности, реализуемой на тягу. Измеряют датчиком 3 новое положение дозирующего органа топливоподачи и сравнивают в блоке 14 измерения рассогласования положения дозирующего органа топливоподачи с заданным положением. Сигнал, пропорциональный рассогласованию дозирующего органа, действующий на выходе блока 14 измерения рассогласования положения дозирующего органа топливоподачи, имеет положительное значение ΔL>0. Сигнал рассогласования ΔL с выхода блока 14 измерения рассогласования положения дозирующего органа топливоподачи подают на вход блока 15 интегрирования величины рассогласования, где его интегрируют по времени, причем при положительном значении сигнала рассогласования ΔL дискретно устанавливают наибольшую постоянную времени интегрирования. Результат с выхода блока 15 интегрирования принимают за новую уставку частоты вращения тяговых электродвигателей 7 и 8, причем изменение уставки на новую большую частоту вращения тяговых электродвигателей 7 и 8 производят в пересчете на скорость движения тепловоза с ускорением, меньшим 0,5 м/с2. Сигнал с выхода блока 15 интегрирования подают на первые входы сумматоров 16 и 17. На второй вход сумматора 17 подают сигнал, максимальный из двух значений, пропорциональный измеренной датчиком 11 частоты вращения тягового электродвигателя 8, связанного с боксующей колесной парой и вычисленного в блоке 27 расчета значения частоты вращения. На выходе сумматора 17 устанавливается новый результат сравнения частот, который усиливают усилителем 19, принимают за величину уставки выпрямителя 6 и подают на управляющий вход управляемого выпрямителя 6. По сигналу выхода усилителя 19 осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя 6, которое уменьшается. Это напряжение подают на вход тягового электродвигателя 8. Поскольку уставка на новую частоту вращения тяговых электродвигателей, формируемая блоком 15 интегрирования, изменяется с значительной инерцией, а увеличение частоты вращения тягового электродвигателя 8 боксующей колесной пары происходит с существенно большим ускорением, регулирование напряжения питания тягового электродвигателя 8 осуществляют по вольт-амперной характеристике, близкой к характеристике постоянной скорости - кривой "б" (фиг.2). У тягового электродвигателя 8 вне зависимости от токовой нагрузки тягового электродвигателя 8 (связанной с силой трения скольжения в точке контакта колеса с рельсом) частота вращения остается близкой к постоянной. При этом минимальны потери касательной силы тяги и мощности на трение скольжения. Тяговый электродвигатель 7 небоксующей колесной пары работает в равновесном режиме в точке, близкой к точке К на кривой "б" (фиг.2). При возможной потере сцепления всех обмоторенных колесных пар (при синхронном боксовании) процессы в электрической передаче происходят аналогично одиночному боксованию колесной пары. Жесткая механическая характеристика у всех тяговых электродвигателей получается за счет общей уставки по скорости вращения колесной пары и, как указывалось выше, уставка по скорости зависит не от нагрузки тягового электродвигателя, а от интеграла рассогласования, формируемого блоком 15 интегрирования, и ограничивается темпом приращения скорости колесной пары на уровне 0,5 м/с2.
Во всех перечисленных случаях боксования, одиночном или синхронном, жесткость механических характеристик тяговых электродвигателей определяется коэффициентом усиления усилителей 18, 19 и, исходя из устойчивости электрической передачи, может быть получена такой же, как у тяговых электродвигателей с независимым возбуждением.
Указанный способ регулирования тяговой передачи позволяет сформировать для каждого тягового электродвигателя поле элементарных вольт-амперных характеристик управляемого выпрямителя для постоянных частот вращения тягового электродвигателя, уровень которых определяется интегралом рассогласования заданного и измеренного положения дозирующего органа топливоподачи дизеля независимо от наличия или числа одновременно боксующих колесных пар, в том числе и одновременном боксовании всех колесных пар.
Механические характеристики тяговых электродвигателей последовательного возбуждения приобретают жесткость не хуже, чем у тяговых электродвигателей независимого возбуждения, что позволяет получить высокие коэффициенты использования сцепного веса локомотива, исключить разносное боксование, ограничить избыточные скорости скольжения колесных пар минимальными величинами вне зависимости от эксплуатационного разброса в диаметрах колесных пар, сделать тяговые характеристики тепловоза близкими к тяговым характеристикам тепловозов с приводом переменно-постоянного тока с тяговыми электродвигателями независимого возбуждения.
Использование в способе максимального сигнала из двух: сигнала с датчика частоты и сигнала с блока расчета скорости позволяет повысить надежность электрической передачи за счет дублирования канала обратной связи по частоте вращения тяговых электродвигателей, а при значительном расхождении измеренных значений частоты вращения с расчетными позволяет сделать вывод о неисправности датчика частоты вращения или же о неисправности тягового электродвигателя постоянного тока, что повышает противобоксовочные свойства тепловоза в целом.
Предлагаемый способ испытан на магистральном грузовом тепловозе 2ТЭ116У и показал положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 1998 |
|
RU2130389C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2009 |
|
RU2438886C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| Способ регулирования электрической тяговой передачи тепловоза | 2020 |
|
RU2735305C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2008 |
|
RU2366583C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ МАНЕВРОВОГО ТЕПЛОВОЗА | 2012 |
|
RU2487021C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2006 |
|
RU2300470C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2001 |
|
RU2205114C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |

Изобретение относится к электрическим тяговым системам транспортных средств. В данном способе устанавливают предельный ток возбуждения синхронного генератора для заданной частоты вращения теплового двигателя, величину рассогласования измеренного положения дозирующего органа топливоподачи с заданным положением интегрируют по времени, результат интегрирования принимают за соответствующую уставку частоты вращения каждого тягового электродвигателя. Затем измеряют частоту вращения, напряжения, токи якорей и обмоток возбуждения всех тяговых электродвигателей постоянного тока локомотива, по полученным результатам определяют величины магнитных потоков, далее вычисляют расчетные значения частот вращения всех тяговых электродвигателей, сравнивают их с величинами измеренных частот, выделяют из них максимальные значения, сравнивают максимальные значения для каждого тягового электродвигателя с уставкой частоты вращения, результаты сравнения усиливают и принимают за величины уставок выходного напряжения управляемых выпрямителей. Также по расчетным и измеренным частотам вращения тяговых электродвигателей вычисляют отклонения и в случае превышения порогового значения отклонения принимают решение о неисправности датчика частоты вращения или тягового электродвигателя. Техническим результатом изобретения является повышение надежности и противобуксовочных свойств тепловоза в условиях ухудшенного сцепления. 1 з.п. ф-лы, 2 ил.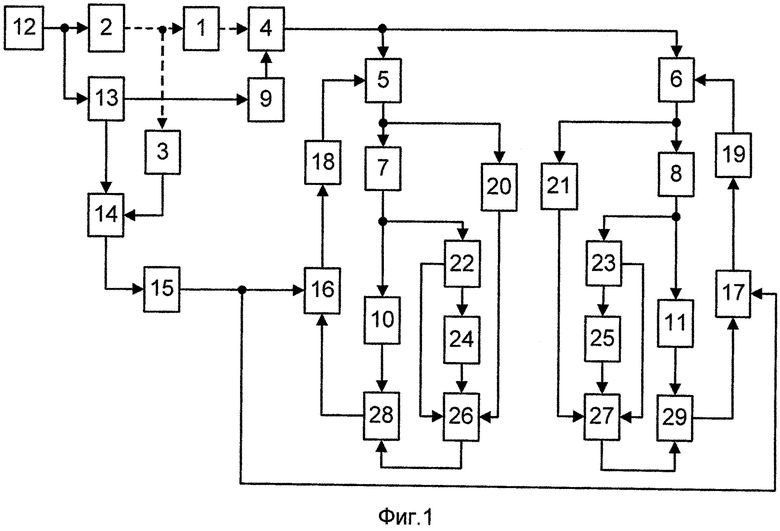
1. Способ регулирования электрической передачи тепловоза, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению частоты вращения теплового двигателя, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени, устанавливают постоянный ток возбуждения синхронного генератора, ток возбуждения синхронного генератора устанавливают предельным для заданной частоты вращения теплового двигателя, величину рассогласования измеренного положения дозирующего органа топливоподачи с заданным положением интегрируют по времени, величину постоянной времени интегрирования устанавливают дискретно, в зависимости от положительного или отрицательного знака сигнала величины рассогласования, результат интегрирования принимают за соответствующую уставку частоты вращения каждого тягового электродвигателя, измеряют частоту вращения каждого тягового электродвигателя, осуществляют фазовое регулирование выходных напряжений управляемых выпрямителей, которые подают на входы тяговых электродвигателей, отличающийся тем, что измеряют напряжения, токи якорей и обмоток возбуждения всех тяговых электродвигателей постоянного тока локомотива, определяют по величинам токов якорей и токов обмоток возбуждения тяговых электродвигателей постоянного тока величины магнитных потоков, по величинам измеренных напряжений на тяговых электродвигателях, определенных значений магнитных потоков и измеренных значений токов якорей тяговых электродвигателей постоянного тока вычисляют расчетные значения частот вращения всех тяговых электродвигателей постоянного тока, сравнивают их попарно с величинами измеренных частот вращения всех тяговых электродвигателей постоянного тока, выделяют из них соответственно максимальные значения, сравнивают максимальные значения для каждого тягового электродвигателя с уставкой частоты вращения тяговых электродвигателей, результаты сравнения усиливают и принимают за величины уставок выходного напряжения управляемых выпрямителей.
2. Способ по п.1, отличающийся тем, что вычисляют отклонения всех расчетных и измеренных частот вращения тяговых электродвигателей постоянного тока, сравнивают их с пороговым значением и в случае превышения порогового значения принимают решение о неисправности соответствующего датчика частоты вращения или тягового электродвигателя постоянного тока.
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 1998 |
|
RU2130389C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2008 |
|
RU2366583C1 |
| US 2010168946 A1, 01.07.2010 | |||

