Изобретение относится к железнодорожному транспорту, а именно к способу регулирования электропередачи тепловозов с автономным тепловым двигателем, тяговым генератором переменного тока, управляемыми выпрямителями и электродвигателями постоянного тока.
Известен способ регулирования электропередачи тепловозов путем регулирования напряжения тягового генератора, принятый за прототип, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение тяговый генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению его частоты вращения, задают положение дозирующего органа топливоподачи регулятора пропорционально заданной частоте вращения, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения тягового генератора, измеряют напряжение тягового генератора, сравнивают его с величиной уставки и по величине рассогласования изменяют ток возбуждения тягового генератора. /SU, авторское свидетельство N 925693, кл. B 60 L 11/02, опубликованное в 1982 г./.
Недостатком известного способа является то, что при реализации тяговых усилий электрическая нагрузка по параллельно соединенным тяговым электродвигателям распределяется равномерно без учета изменения вертикальных механических нагрузок по колесным парам, обусловленного реакциями привода и особенностью экипажной части тепловоза.
При равномерном распределении электронагрузок по тяговым двигателям лимитирующая (с меньшей вертикальной нагрузкой) колесная пара имеет большую склонность к боксованию, по сравнению с компенсирующими (с большей вертикальной нагрузкой) колесными парами.
Реализация тяговых усилий тепловозом производится при недоиспользовании сцепного веса тепловоза, что снижает его тяговые возможности без боксования.
Известен способ регулирования электрической передачи тепловоза, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению частоты вращения теплового двигателя, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени, устанавливают постоянный ток возбуждения синхронного генератора, отличающийся тем, что ток возбуждения синхронного генератора устанавливают предельным для заданной частоты вращения теплового двигателя, величину рассогласования измеренного положения дозирующего органа топливоподачи с заданным положением интегрируют по времени с постоянными времени, величину которых устанавливают дискретно - большей при положительном и меньшей при отрицательном знаках величины рассогласования, по результату интегрирования принимают соответствующую уставку частоты вращения тяговых электродвигателей, измеряют частоту вращения каждого тягового электродвигателя, сравнивают частоту вращения каждого тягового электродвигателя отдельно с уставкой частоты вращения тяговых электродвигателей, результат сравнения усиливают, принимают за величину, соответствующую уставке выходного напряжения управляемого выпрямителя, подают на управляющий вход управляемого выпрямителя и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя, которое подают на вход тягового электродвигателя. (RU, патент N 2130389, кл. B 60 L 1/06, 1999 г.).
Недостатком известного способа является то, что распределение мощности (тяговых усилий по электродвигателям колесных пар) производят только в режимах возникающего боксования колесных пар тепловоза, что приводит к потерям мощности в контакте колесо - рельс, обусловленным потерями на трение, и недоиспользованию потенциальных возможностей к реализации тяговых усилий тепловоза без боксования.
Техническим результатом изобретения является повышение тяговых свойств тепловоза путем раздельного регулирования мощности, подводимой к тяговым электродвигателям последовательного возбуждения и создания в условиях отсутствия боксования колесных пар тепловоза более полного использования сцепного веса тепловоза во всем скоростном диапазоне работы тепловоза.
Указанный технический результат достигается тем, что в способе регулирования электрической передачи тепловоза, заключающемся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты и нагрузки теплового двигателя, соответствующее текущему значению его частоты вращения, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину их рассогласования интегрируют и принимают за величину уставки выходного напряжения тягового генератора, измеряют напряжение тягового генератора, сравнивают его с величиной уставки и по величине рассогласования изменяют ток возбуждения тягового генератора, определяют направление движения тепловоза, измеряют частоту вращения каждого электродвигателя, выделяют минимальную частоту вращения тягового электродвигателя, измеряют мощность тягового генератора, распределяют мощность тягового генератора по тяговым электродвигателям колесных пар, для чего формируют задание мощности каждого тягового электродвигателя в функции действующих вертикальных нагрузок на колесные пары тепловоза, минимальной частоты вращения тягового электродвигателя, мощности тягового генератора, направления движения тепловоза, заданной частоты вращения теплового двигателя, измеряют мощность каждого тягового электродвигателя и сравнивают с заданием уставки мощности, результат сравнения усиливают, принимают за величину, соответствующую уставке выходного напряжения управляемого выпрямителя, подают на управляющий вход управляемого выпрямителя и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя, которое подают на вход тягового электродвигателя.
На фиг. 1 представлена блок-схема устройства, реализующего способ.
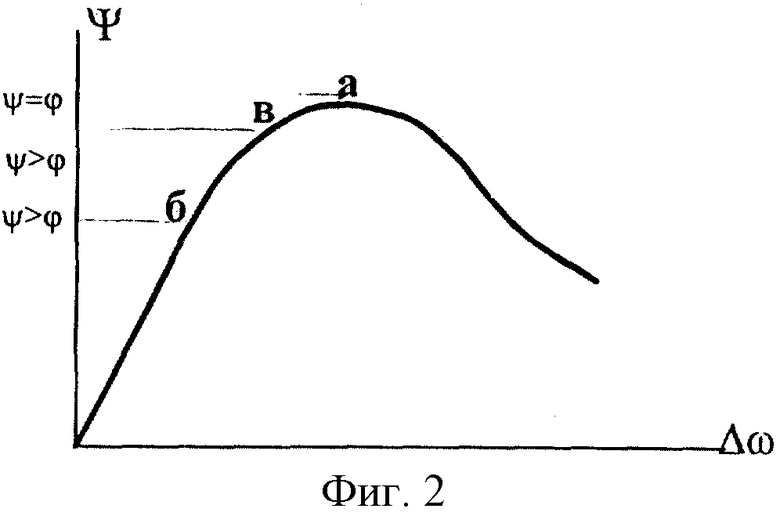
На фиг. 2 представлена характеристика боксования колесных пар тепловоза, избыточная скорость скольжения которых приведена к избыточной частоте вращения тяговых электродвигателей колесных пар.
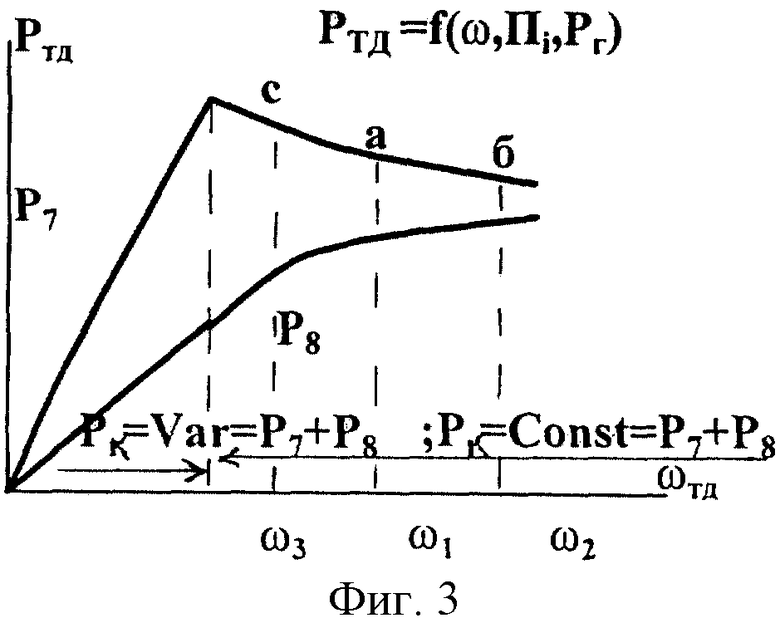
На фиг. 3 представлены характеристики изменения мощности, подводимой к тяговым электродвигателям в функции частоты вращения тяговых электродвигателей, вертикальных нагрузок колесных пар и мощности тягового генератора.
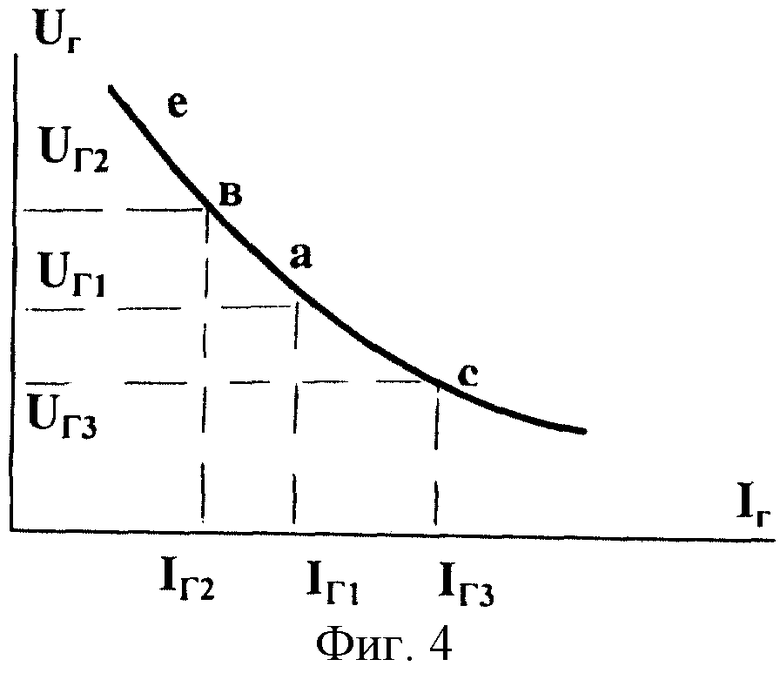
На фиг. 4 представлена внешняя характеристика тягового генератора в режиме постоянной мощности.
Устройство (фиг. 1) для реализации предлагаемого способа состоит из теплового двигателя 1, например дизеля, с регулятором 2 частоты вращения и нагрузки, с датчиком 3 положения рейки топливных насосов высокого давления дизеля. Дизель 1 связан с электрической передачей, в которую входит нижеперечисленное оборудование, так сам дизель 1 соединен, например, с синхронным тяговым генератором 4. Силовой выход синхронного генератора 4 подключен к силовым входам управляемых выпрямителей 5 и 6. Силовой выход управляемого выпрямителя 5 подключен на вход тягового электродвигателя 7, силовой выход управляемого выпрямителя 6 подключен на силовой вход тягового электродвигателя 8. Тяговый электродвигатель 7 соединен с датчиком частоты 9, тяговый электродвигатель 8 соединен с датчиком частоты 10. Выходы датчиков частоты 9 и 10 соединены с входами устройства 11 выделения минимальной частоты вращения тяговых электродвигателей 7 и 8. К силовому выходу управляемого выпрямителя 5 подключены датчик тока 12 и датчик напряжения 13, выходы которых подключены на входы множительного устройства 14 измерения мощности тягового электродвигателя 7.
К силовому выходу управляемого выпрямителя 6 подключены датчик тока 15 и датчик напряжения 16, выходы которых подключены на входы множительного устройства 17 измерения мощности тягового электродвигателя 8.
Один из выходов задатчика 18 частоты вращения дизеля и направления движения тепловоза, например многопозиционного контроллера машиниста тепловоза, соединен с входом регулятора 2 частоты вращения и нагрузки дизеля 1, с входом функционального преобразователя 19, формирующего по заданной частоте вращения дизеля 1 задание положения дозирующего органа топливоподачи, и с одним из входов блока 20 формирования задания мощности тяговых электродвигателей 7 и 8, выполненного на базе микроконтроллера, другой выход задатчика 18 частоты вращения и направления движения соединен с другим входом блока 20.
Выход функционального преобразователя 19 соединен с одним из входов сумматора 21 измерения рассогласования, другой вход которого соединен с выходом датчика 3 положения рейки топливных насосов. Выход сумматора 21 соединен с входом интегратора 22, выход которого соединен с одним из входов сумматора 23. На силовой выход синхронного генератора подключены датчик напряжения 24 и датчик тока 25, выходы которых подключены на вход множительного устройства 26 измерения мощности тягового генератора 4, а выход множительного устройства 26 соединен с одним из входов блока 20 формирования задания мощности тяговых электродвигателей 7 и 8.
Выход сумматора 23 через блок управления 27 тока возбуждения тягового генератора 4 соединен с обмоткой возбуждения тягового генератора 4. Выход устройства 11 выделения минимальной частоты вращения соединен с одним из входов блока 20 формирования задания мощности тяговых электродвигателей.
Один из выходов блока 20 формирования задания мощности тяговых двигателей соединен с одним из входов сумматора 28, другой выход блока 20 соединен с одним из входов сумматора 29. Выход сумматора 28 через усилитель 30 подключен на управляющий вход управляемого выпрямителя 5. Выход сумматора 29 через усилитель 31 подключен на управляющий вход управляемого выпрямителя 6. Число пар "управляемый выпрямитель - тяговый электродвигатель", например 5 и 7, или 6 и 8, и число функциональных элементов, например 9, 12, 13, 14, 28 и 30 или 10, 15, 16, 17, 29, 31, в электрической тяговой передаче равно числу движущих колесных пар тепловоза, например, двум, как в рассматриваемом устройстве на фиг. 1.
Способ осуществляется следующим образом.
Контроллером 18 машиниста определяют направление движения тепловоза и задают частоту вращения дизеля 1.
На выходах контроллера 18 машиниста действуют сигналы, кодовый сигнал, пропорциональный заданной частоте вращения дизеля 1, который поступает на вход регулятора 2 частоты вращения и нагрузки дизеля 1, на вход функционального преобразователя 19 и на один из входов блока 20 формирования задания мощности тяговых электродвигателей 7 и 8, на другой из входов которого поступает другой сигнал с выхода контроллера 18 машиниста, по которому определяют задание на направление движения тепловоза.
Регулятор 2 частоты и нагрузки удерживает частоту вращения дизеля пропорционально кодовому сигналу задания частоты вращения дизеля 1, поступающего с контроллера 18 машиниста.
Датчиком 3 измеряют положение дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки дизеля 1, соответствующее текущему значению частоты вращения дизеля 1. Выходной сигнал "Lи" датчика 3, пропорциональный положению органа топливоподачи, поступает на один из входов сумматора 21.
Функциональным преобразователем 19 задают положение дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки пропорционально заданной частоте вращения дизеля 1, для чего в функциональном преобразователе 19 преобразуют код заданной частоты, поступающий на вход функционального преобразователя 19 с выхода контроллера 18 машиниста, в сигнал "Lз" задания положения дозирующего органа топливоподачи, который с выхода функционального преобразователя 19 поступает на другой вход сумматора 21 измерения рассогласования. Сигнал "Lз" заданного положения дозирующего органа топливоподачи и сигнал "Lu" измеренного датчиком 3 положения дозирующего органа топливоподачи в сумматоре 21 сравниваются по величине и знаку отклонения. Величина рассогласования ΔL = ± (Lз - Lu) с выхода сумматора 21 поступает на вход интегратора 22. Величину рассогласования ΔL интегрируют по времени в интеграторе 22 и выходной сигнал интегратора 22 принимают за величину уставки выходного напряжения тягового генератора 4 и подают на вход сумматора 23. Датчиком напряжения 24 измеряют напряжение тягового генератора 4. Сигнал с выхода датчика 24 подают на вход сумматора 23 и на вход множительного устройства 26.
В сумматоре 23 сравнивают сигнал с датчика 24, пропорциональный напряжению тягового генератора 4, с сигналом уставки напряжения тягового генератора 4 и результат сравнения с выхода сумматора 23 подают на вход блока управления 27 током возбуждения тягового генератора 4, и по величине рассогласования изменяют ток в обмотке возбуждения тягового генератора 4. Тяговый генератор 4 возбуждается и на его выходе действует напряжение переменного тока, которое поступает на силовые входы управляемых выпрямителей 5 и 6.
Измеряют частоты вращения каждого тягового электродвигателя 7 и 8 и выделяют минимальную частоту вращения тягового электродвигателя, для чего:
датчиком частоты 9 измеряют частоту вращения тягового электродвигателя 7 и сигнал, пропорциональный частоте вращения тягового электродвигателя 7, с выхода датчика 9 подают на один из входов устройства 11 выделения минимальной частоты;
датчиком частоты 10 измеряют частоту вращения тягового электродвигателя 8 и сигнал, пропорциональный частоте вращения тягового электродвигателя с выхода датчика 10 подают на другой вход устройства выделения минимальной частоты.
Устройство 11 выделяет из измеренных частот вращения тяговых электродвигателей 7 и 8 минимальную частоту вращения и сигнал минимальной частоты с выхода устройства 11 подают на один из входов блока 20.
Мощность тягового генератора 4 измеряют множительным устройством 26 перемножением сигналов, сигнала с выхода датчика 24, пропорционального напряжению тягового генератора 4, и сигнала с выхода датчика 25, пропорционального току тягового генератора 4. Сигнал, пропорциональный измеренной мощности тягового генератора 4, с выхода множительного устройства 26 подают на один из входов блока 20 формирования задания мощности тяговых электродвигателей 7 и 8.
На другие входы блока 20 формирования задания мощности тяговых электродвигателей 7 и 8 поступают сигналы: сигнал направления движения тепловоза с выхода контроллера 18 машиниста, сигнал кода заданной частоты вращения дизеля 1 с другого выхода контроллера 18 машиниста, сигнал, пропорциональный минимальной частоте вращения тяговых электродвигателей 7 и 8 с выхода устройства 11, сигнал, пропорциональный измеренной мощности тягового генератора 4 с выхода множительного устройства 26.
Распределяют мощность тягового генератора 4 по тяговым электродвигателям 7 и 8 колесных пар тепловоза, для чего в блоке 20 формируют задание мощности каждого тягового электродвигателя в функции действующих вертикальных нагрузок на колесные пары тепловоза, минимальной частоты вращения одного из тяговых электродвигателей, мощности тягового генератора, направления движения тепловоза и заданной частоты вращения коленчатого вала дизеля.
Формирование сигналов задания мощности тяговых электродвигателей 7 и 8 в блоке 20 производится исходя из следующих положений.
Если электрическая мощность равномерно распределяется по тяговым электродвигателям, например при их параллельном соединении, то реализуемые колесными парами силы тяги одинаковы
F1 = F2 =... = Fi. (1)
Коэффициенты тяги колесных пар различны. Лимитирующая (с наименьшей вертикальной нагрузкой) колесная пара реализует наибольший коэффициент тяги. Компенсирующая (с наибольшей вертикальной нагрузкой) колесная пара реализует наименьший коэффициент тяги.
При работе лимитирующей колесной пары на грани сцепления коэффициент тяги лимитирующей колесной пары приближается в пределе к физическому значению коэффициента сцепления (фиг. 2, характеристика боксования, точка "а"), а коэффициент тяги компенсирующей колесной пары (фиг. 2, характеристика боксования, точка "б") меньше физического коэффициента сцепления. Запас сцепления колес с рельсами лимитирующей колесной пары минимален, а через компенсирующую колесную пару не реализуются ее потенциальные возможности.
Одинаковые условия по реализации сцепления колесных пар тепловоза с рельсами, в том числе и потенциальных возможностей по сцеплению, достигается выравниванием коэффициентов тяги колесных пар тепловоза (фиг. 2, характеристика боксования, точка "в"). Выравнивание коэффициентов тяги колесных пар тепловоза увеличивает использование сцепного веса тепловоза.
Полное использование сцепного веса тепловоза при реализации тяговых усилий возможно, если коэффициенты тяги колесных пар тепловоза одинаковы, равны коэффициенту тяги тепловоза и не превышают потенциальный коэффициент сцепления
где F1, F2,..., Fi - сила тяги, развиваемая колесными парами; П1, П2,... , Пi - вертикальные нагрузки колесных пар; РСЦ - сцепной вес тепловоза; ψ - потенциальный коэффициент сцепления (точка "а" на фиг. 2), ∑ Fi - тяговое усилие, развиваемое тепловозом.
Реализация тяговых усилий сопровождается распределением сцепного веса по колесным парам тепловоза. Вертикальные нагрузки на колесные пары можно определить из соотношений
где П0 - среднее значение вертикальной нагрузки на колесную пару; m - число колесных пар; kmi - коэффициент, учитывающий реакцию в приводе и экипажной части тепловоза от Fi на колесную пару, знак которого определяется направлением движения тепловоза.
Тяговое усилие i-й колесной пары соответствует
где Pi - касательная мощность, подводимая к i-й колесной паре; ω - частота вращения тягового электродвигателя, приведенная к i-й колесной паре; k - коэффициент размерности.
Тяговое усилие, развиваемое тепловозом, соответствует
где Pk - мощность тягового генератора, идущая на реализацию тяговых усилий; ωmin - минимальная частота вращения одного из тяговых электродвигателей; k - коэффициент размерности.
На основании соотношений (2), (3), (4) и (5) в блоке 20 находят значение Pi подводимых к тяговым электродвигателям мощностей при условии реализации по колесным парам одинаковых коэффициентов тяги и формируют на выходе блока 20 уставку заданных мощностей тяговых электродвигателей. Формирование уставки задания мощности тяговых электродвигателей в блоке 20 осуществляют как для режима Pк = Const, так и для режима Pк = Var (режима трогания), а границы режимов определяются заданной частотой вращения теплового двигателя.
На фиг. 3 представлена, например, характеристика уставки задания уровня мощности для тяговых электродвигателей 7 и 8 двухосного тепловоза для некоторой фиксированной частоты вращения дизеля в режимах работы Рк= Const и Pк= Var.
Измеряют мощность каждого тягового электродвигателя и сравнивают с заданием уставки мощности, результат сравнения усиливают, принимают за величину, соответствующую уставке выходного напряжения управляемого выпрямителя, подают на управляющий вход управляемого выпрямителя и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя, которое подают на вход тягового электродвигателя.
Так уставка задания мощности тягового электродвигателя 7 с одного из выходов блока 20 поступает на один из входов сумматора 28, на другой вход которого поступает сигнал, пропорциональный мощности тягового электродвигателя 7, которую измеряют множительным устройством 14, на входы которого поступают сигналы с датчиков тока 12 и напряжения 13 тягового электродвигателя 7.
В сумматоре 28 сравнивают сигнал, пропорциональный измеренной мощности, с уставкой мощности тягового электродвигателя 7 и результат сравнения с выхода сумматора 28 подают на вход усилителя 30. Результат сравнения в усилителе 30 усиливают и принимают за величину уставки выходного напряжения управляемого выпрямителя 5 тягового электродвигателя 7 и подают на управляющий вход управляемого выпрямителя 5, и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя 5, которое подают на вход тягового электродвигателя 7. Тяговый электродвигатель 7 нагружается и его мощность устанавливается близкой к заданной мощности.
Уставка задания мощности тягового электродвигателя 8 с другого выхода блока 20 поступает на один из входов сумматора 29, на другой вход которого поступает сигнал, пропорциональный мощности тягового электродвигателя 8, которую измеряют множительным устройством 17, на входы которого поступают сигналы с датчиков тока 15 и напряжения 16 тягового электродвигателя 8.
В сумматоре 29 сравнивают сигнал, пропорциональный измеренной мощности, с уставкой мощности тягового электродвигателя 8 и результат сравнения с выхода сумматора 29 подают на вход усилителя 31. Результат сравнения в усилителе 31 усиливают и принимают за величину уставки выходного напряжения управляемого выпрямителя 6 тягового электродвигателя 7, и подают на управляющий вход управляемого выпрямителя 6, и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя 5, которое подают на вход тягового электродвигателя 8.
Тяговый электродвигатель 8 нагружается, и его мощность устанавливается близкой к заданной мощности.
Тяговый генератор 4 нагружается, и нагружается дизель 1. Равновесие в системе наступает, когда текущее положение дозирующего органа топливоподачи дизеля (сигнал Lи, датчик 3), заданное положение дозирующего органа (сигнал L3, функциональный преобразователь 19) будут близки друг к другу, что соответствует равенству заданной величины мощности дизеля, ограниченной его экономичностью и частотой вращения коленчатого вала, с свободной мощностью дизеля 1.
Равновесие в системе может быть представлено, например, положением точки "а" на равнобокой гиперболе "е", наложенной на линии постоянного напряжения в координатах "Напряжение генератора UГ - ток генератора IГ", фиг. 3, и уровнями мощности тяговых электродвигателей в сечении "а", фиг. 3.
При переходах поездом перелома профиля ток тягового генератора 4 может увеличиваться до IГ3 или уменьшаться до IГ2, фиг. 4, возникает перегрузка или недогрузка тягового генератора, в этом случае появляется рассогласование в заданном "Lз" и измеренном "Lи" положении дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки дизеля 1. Разность ± ΔL поступает на вход интегратора 22. Сигнал на выходе интегратора 22 изменяется, изменяется сигнал задания на выходе сумматора 23, контура регулирования напряжения тягового генератора 4. Напряжение генератора 4, поддерживаемое контуром регулирования (датчик 24, сумматор 23, блок 27 возбуждения), изменяется. Равновесие в системе при уменьшении тока генератора 4 наступит, когда напряжение тягового генератора 4 станет равным UГ2, ток - lГ2, (фиг. 4), а мощность, отбираемая тяговым генератором от дизеля, станет равной свободной мощности дизеля, (фиг. 4, точка "в"). Эта мощность будет распределена контуром регулирования распределения мощности по тяговым электродвигателям 7 и 8 в соответствии с фиг. 3, например, в сечении "в".
Равновесие в системе при увеличении тока генератора 4 наступает в точке "с", когда напряжение генератора 4 станет равным UГ3, ток - IГ3 (фиг.3), а мощность, отбираемая тяговым генератором от дизеля, станет равной свободной мощности дизеля и эта мощность будет распределена контуром регулирования распределения мощности по тяговым электродвигателям 7 и 8 в соответствии с фиг. 3, например, в сечении "c".
Кроме того, указанный способ позволяет при необходимости осуществить формирование задания электрической мощности тяговых электродвигателей для равномерного (одинакового) распределения электрической мощности без учета действующих вертикальных нагрузок колесных пар, для этого в блок 20 вводится дополнительный постоянный внешний сигнал, например единичный сигнал некоторого постоянного уровня напряжения, указанный на фиг. 1 пунктиром.
Указанный способ регулирования тяговой электрической передачи позволяет распределить электрическую мощность тягового генератора 4 по тяговым электродвигателям колесных пар тепловоза исходя из потенциальных возможностей колесных пар тепловоза к реализации тяговых усилий, создаст одинаковые условия для реализации тяговых усилий колесными парами тепловоза за счет учета действующих на колесные пары вертикальных нагрузок. Сила тяги, реализуемая тепловозом без режима боксования, увеличивается. Тяговые свойства тепловоза улучшаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2001 |
|
RU2205114C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 1998 |
|
RU2130389C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2006 |
|
RU2300470C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2534597C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2009 |
|
RU2438886C2 |
| Способ регулирования электрической тяговой передачи тепловоза | 2020 |
|
RU2735305C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2008 |
|
RU2366583C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ МАНЕВРОВОГО ТЕПЛОВОЗА | 2012 |
|
RU2487021C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423252C1 |
Изобретение относится к железнодорожному транспорту. В способе задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину рассогласования интегрируют по времени и принимают за величину уставки выходного напряжения синхронного генератора. Ток возбуждения генератора изменяют по отклонению его напряжения от уставки. Мощность генератора распределяют по тяговым электродвигателям колесных пар, для чего формируют задание мощности каждого электродвигателя в функции вертикальных нагрузок на колесные пары, минимальной частоты вращения электродвигателя, мощности генератора, направления движения, заданной частоты вращения теплового двигателя. По отклонению мощности электродвигателя от заданной определяют уставку выходного напряжения управляемого выпрямителя и осуществляют фазовое регулирование выходного напряжения последнего. Способ обеспечивает повышение тяговых свойств тепловоза и более полное использование сцепного веса во всем скоростном диапазоне. 4 ил.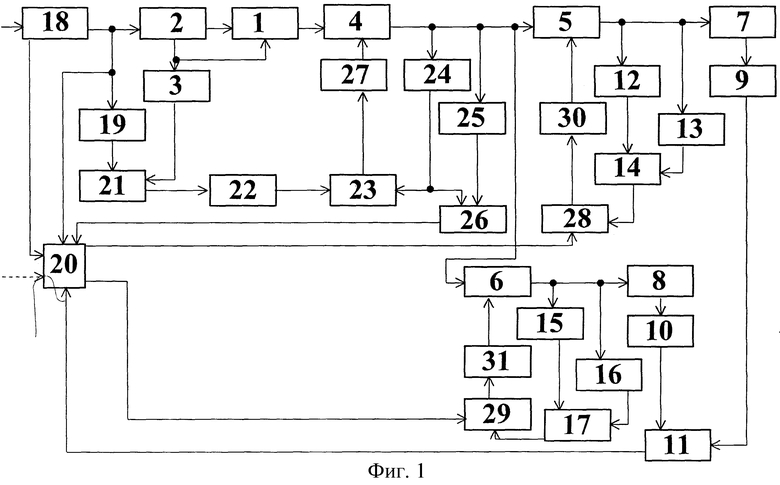
Способ регулирования электрической передачи тепловоза, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты и нагрузки теплового двигателя, соответствующее текущему значению его частоты вращения, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки пропорционально заданной частоте вращения теплового двигателя, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени и принимают за величину уставки выходного напряжения тягового генератора, измеряют напряжение тягового генератора, сравнивают его с величиной уставки и по величине рассогласования изменяют ток возбуждения тягового генератора, отличающийся тем, что определяют направление движения тепловоза, измеряют частоту вращения каждого электродвигателя, выделяют минимальную частоту вращения тягового электродвигателя, измеряют мощность тягового генератора, распределяют мощность тягового генератора по тяговым электродвигателям колесных пар, для чего формируют задание мощности каждого тягового электродвигателя в функции действующих вертикальных нагрузок на колесные пары тепловоза, минимальной частоты вращения тягового электродвигателя, мощности тягового генератора, направления движения тепловоза, заданной частоты вращения теплового двигателя, измеряют мощность каждого тягового электродвигателя и сравнивают с заданием уставки мощности, результат сравнения усиливают, принимают за величину, соответствующую уставке выходного напряжения управляемого выпрямителя, подают на управляющий вход управляемого выпрямителя и осуществляют фазовое регулирование выходного напряжения управляемого выпрямителя, которое подают на вход тягового электродвигателя.
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ И ВИХРЕВОЙ ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 1993 |
|
RU2120389C1 |
| Способ регулирования напряжения тягового генератора тепловоза | 1980 |
|
SU925693A1 |
| Тяговый электропривод транспортного средства | 1988 |
|
SU1532353A1 |
| Устройство регулирования скорости тепловоза с электрической передачей | 1987 |
|
SU1472304A1 |

