Область техники, к которой относится изобретение
Настоящее изобретение относится к оборудованию гидроэлектростанций и, более конкретно, к системам управления кольцевым затвором турбинной установки гидроэлектростанции, позволяющим отключать поток воды от турбины для производства электроэнергии.
Уровень техники
В используемых на гидроэлектростанциях турбинных установках применяются кольцевые затворы для отключения потока воды, поступающего от расположенного выше по течению водохранилища, такого как река или озеро, через турбину для производства электроэнергии в находящийся внизу по течению водоем, кольцевые затворы (называемые также цилиндрическими затворами) применяются в гидроэлектрических турбинах в качестве шлюзовых отключающих устройств взамен обычных дисковых затворов или шаровых задвижек. Кольцевой затвор содержит затворное кольцо, представляющее собой тонкий, короткий и жесткий цилиндр, окружающий ротор гидротурбины, который, будучи установлен в закрытое положение, блокирует канал для прохода воды между распределительным каналом и статорным кольцом гидрогенератора. Затворное кольцо, выполняющее роль изолирующего клапана, обычно располагается в распределительном канале гидротурбины между статорной колонной и направляющими аппаратами. Когда кольцевой затвор находится в открытом положении, затворное кольцо обычно располагается в отделении, образованном между статорным кольцом и крышкой головки, где затворное кольцо остается полностью втянутым и удаленным из канала для прохода воды. При обычной работе кольцевой затвор закрывается после закрытия направляющих аппаратов гидротурбины, а при запуске установки кольцевой затвор открывается перед началом открытия направляющих аппаратов. При возникновении аварийных условий или ситуаций затворное кольцо может быть закрыто с преодолением силы сопротивления полного потока.
Примеры известных систем управления кольцевым затвором, в которых используются механические связи, описываются в патенте США №4434964 и в публикации патента РСТ WO 99/43954. Как указывается, управление кольцевым затвором осуществляется с помощью комплекта сервомоторов, расположенных на расстоянии друг от друга по окружности затворного кольца. Данные сервомоторы синхронизированы посредством механического соединения пар расположенных рядом сервомоторов с помощью цепных петель, таким образом, что каждые два расположенных рядом сервомотора соединены замкнутой цепной петлей. В одной из возможных конфигураций, для соединения шести сервомоторов всего требуется шесть цепных петель. Кроме того, каждая цепная петля должна иметь свое собственное натяжное устройство для поддержания натяжения в каждой из петель. Для сохранения горизонтальной ориентации затворного кольца необходимы точные и жесткие винтовые кинематические пары и приводы.
Каждая из этих систем управления кольцевым затвором включает много механических частей, которые подвержены износу (например, цепные петли и звездочки для цепей), являются сравнительно сложными и достаточно дорогостоящими при производстве и техобслуживании и требуют сложной регулировки и настройки (например, использования натяжных устройств для цепных петель). Кроме того, при применении механических звеньев для более чем трех сервомоторов система управления становится статически неопределимой и ее эффективная тяговая способность уменьшается, поскольку сервомоторы взаимно нагружают друг друга вследствие распространения параметров по их каналам управления. В результате способность запорного кольца воспринимать внешнюю нагрузку уменьшается.
В публикации патента РСТ WO 99/43954 описывается система управления, в которой используются как гидромеханические, так и электрогидравлические звенья для сохранения горизонтальной ориентации затворного кольца. Данная система включает в себя значительное количество гидравлических клапанов, а также объемных дозаторов. Система также содержит определенное количество моторов и/или насосов, равное количеству сервомоторов. Конфигурация с гидравлическими клапанами, моторами, насосами и т.п. делает систему сложной и более дорогостоящей из-за количества единиц гидравлического оборудования и объема работ, связанных с настройкой системы. Кроме того, при наличии более чем трех сервомоторов система становится статически неопределимой, что уменьшает ее эффективную тяговую способность. Когда система статически неопределима, алгоритм настройки регулятора также является неопределимым, что увеличивает объем работ, связанных с настройкой системы управления.
Раскрытие изобретения
Изобретение представляет собой систему управления кольцевым затвором для управления перемещением кольцевого затвора между открытым и закрытым положениями и содержит:
три группы сервомоторов, каждая из которых связана с одной из трех контрольных точек, расположенных по окружности затворного кольца, и содержит:
сервомоторы, гидравлически параллельно соединенные друг с другом и соединенные с затворным кольцом в точках соединения на затворном кольце, размещенные по периферии затворного кольца симметрично относительно плоскости, проходящей через соответствующую контрольную точку и ось симметрии затворного кольца;
датчик, подключенный для определения положения соответствующей контрольной точки сервомоторной группы;
клапан управления, подключенный между гидравлическим источником давления и сервомоторами в сервомоторной группе для регулирования расхода жидкости под давлением, подаваемой к сервомоторам данной сервомоторной группы; и
регулятор, подключенный к каждому из управляющих клапанов и к каждому датчику, служащий для того, чтобы три отдельных позиционных замкнутых контура управления могли осуществлять управление положением контрольных точек; при этом данные позиционные замкнутые контуры управления работают одновременно, регулируя положение контрольных точек на затворном кольце для сохранения горизонтальной ориентации затворного кольца с заданной степенью точности.
Контрольные точки могут быть расположены под углом 120 градусов относительно друг друга на периферии затворного кольца.
Каждая сервомоторная группа может содержать два сервомотора.
Предпочтительно, два сервомотора каждой сервомоторной группы присоединены к затворному кольцу в точках соединения, расположенных под углом 60 градусов или менее относительно друг друга по окружности затворного кольца на одинаковом расстоянии по обе стороны от соответствующей контрольной точки.
Каждая сервомоторная группа может содержать три сервомотора.
При этом первый и второй сервомоторы каждой сервомоторной группы соединены с затворным кольцом в точках соединения, расположенных под углом 60 градусов или менее относительно друг друга по окружности затворного кольца на одинаковых расстояниях с обеих сторон от соответствующей контрольной точки, а третий сервомотор каждой сервомоторной группы соединен с затворным кольцом в точке соединения, которая совпадает с соответствующей контрольной точкой.
Каждая сервомоторная группа может содержать четное число сервомоторов, включающее в себя одну или несколько пар сервомоторов, причем сервомоторы каждой пары соединены с затворным кольцом в точках соединения на окружности затворного кольца, расположенных на одинаковом расстоянии по обе стороны от соответствующей контрольной точки.
При этом каждая сервомоторная группа содержит одну или несколько пар сервомоторов, причем каждый из расположенных друг с другом комплектов сервомоторов в каждой сервомоторной группе соединен с затворным кольцом в точках соединения, расположенных на одинаковых расстояниях друг от друга.
Каждая сервомоторная группа может содержать нечетное количество сервомоторов, включающее в себя одну или несколько пар сервомоторов, причем сервомоторы каждой пары соединены с затворным кольцом в точках соединения на окружности затворного кольца, находящихся на одинаковых расстояниях от соответствующей контрольной точки, а также один сервомотор, соединенный с затворным кольцом в точке соединения, совпадающей с соответствующей контрольной точкой.
Предпочтительно, датчики измеряют перемещение поршневого штока, соединенного с соответствующей контрольной точкой.
Регулятор может одновременно контролировать положения по вертикали трех контрольных точек на затворном кольце с целью сохранения горизонтальной ориентации данного затворного кольца с заданной степенью точности при его перемещении.
Используемые сервомоторы представляют собой сервомоторы линейного типа.
Другим объектом изобретения является способ управления положением кольцевого затвора с помощью определенного количества сервомоторов, соединенных с затворным кольцом в точках соединения, расположенных по окружности затворного кольца, предусматривающий:
измерение перемещения или положения каждой из трех контрольных точек для формирования трех сигналов обратной связи; и
одновременное использование входных управляющих сигналов для регулирования вертикального положения контрольных точек и сохранения горизонтального положения затворного кольца.
Способ может включать использование управляющих сигналов для регулирования вертикального положения контрольных точек включает в себя подачу каждого из управляющих сигналов к разным клапанам управления, каждый из которых установлен между источником гидравлического давления и одной из сервомоторных групп с целью обеспечения возможности регулирования одним и тем же клапаном управления расхода гидравлической жидкости, поступающего ко всем сервомоторам одной из сервомоторных групп.
Измерение перемещения или положения каждой из трех контрольных точек осуществляется посредством измерения перемещения или положения поршневых штоков или кронштейнов, прикрепленных к каждой из трех контрольных точек.
Еще одним объектом является система управления кольцевым затвором, включающая в себя:
первую сервомоторную группу, вторую сервомоторную группу и третью сервомоторную группу, каждая из которых связана с соответствующей контрольной точкой, расположенной на кольцевом торце кольцевого затвора, причем каждая из вышеупомянутых групп исполнительных механизмов связана с
сервомоторами сервомоторных групп, соединенных с кольцевым торцом кольцевого затвора в соответствующих точках соединения;
датчиком, соединенным с кольцевым торцом кольцевого затвора, и
клапаном управления, соединенным с источником гидравлического давления и, по меньшей мере, с двумя исполнительными механизмами; и
регулятор, соединенный с каждым из клапанов управления и каждым из датчиков, управляющий по отдельности замкнутым контуром управления каждой сервомоторной группы с целью регулирования положения контрольных точек и сохранения горизонтальной ориентации кольцевого затвора.
Предпочтительно, соответствующие контрольные точки для сервомоторных групп равномерно разнесены по окружности кольцевого торца кольцевого затвора.
Каждый из датчиков служит для определения положения соответствующей контрольной точки определенной сервомоторной группы, связанной с данным датчиком обратной связи по положению/скорости.
Клапан управления осуществляет регулирование расхода гидрожидкости под давлением, подаваемой к сервомоторам определенной сервомоторной группы.
Точки соединения каждой сервомоторной группы могут быть расположены под углом менее чем 60 градусов одна к другой на кольцевом торце кольцевого затвора.
Краткое описание чертежей
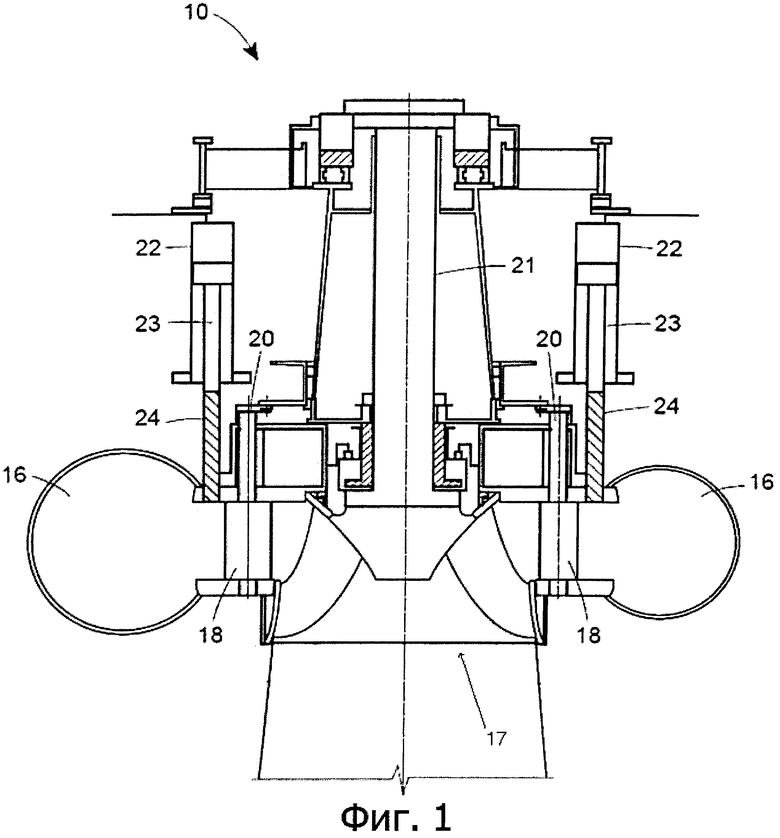
На Фиг.1 показан вид в разрезе турбинной установки гидроэлектростанции, в которой используется кольцевой затвор для отключения потока воды от радиально-осевой гидротурбины.
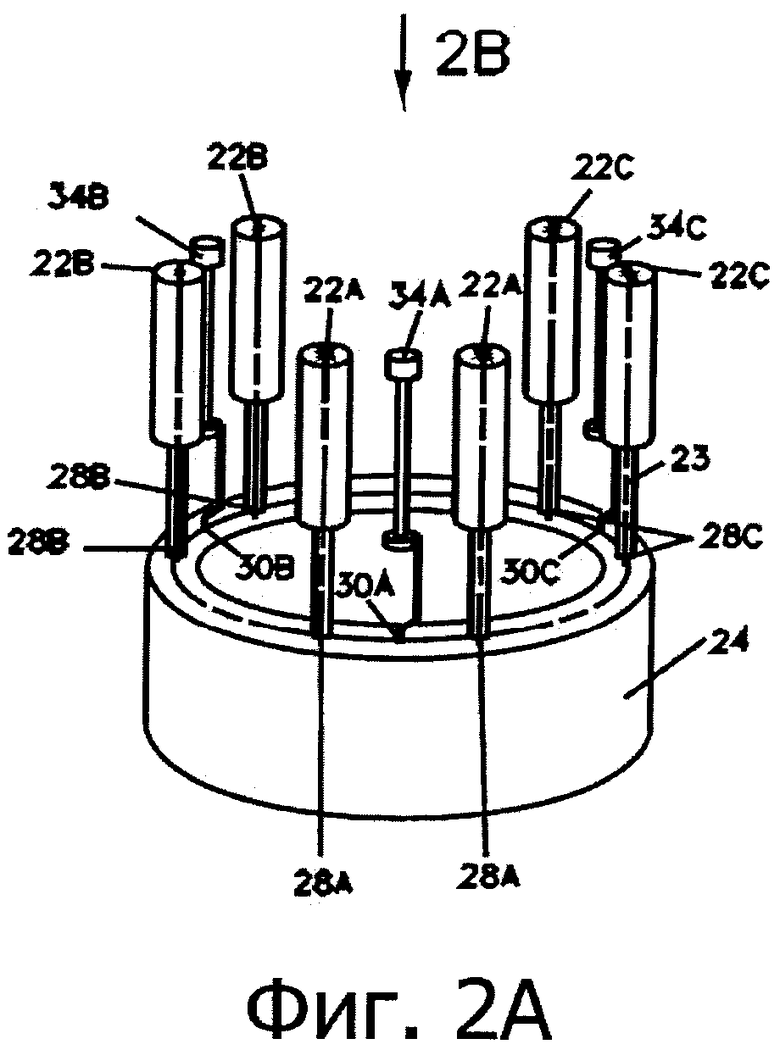
На Фиг.2А представлено перспективное изображение примера кольцевого затвора и сервоприводной системы с тремя группами сервомоторов, в каждой по два сервомотора, которая может быть использована для перемещения кольцевого затвора, показанного на Фиг.1.
На Фиг.2В представлен вид сверху примерного кольцевого затвора и сервоприводной системы с тремя группами сервомоторов, в каждой по два сервомотора, которая может быть использована для перемещения кольцевого затвора, показанного на Фиг.1.
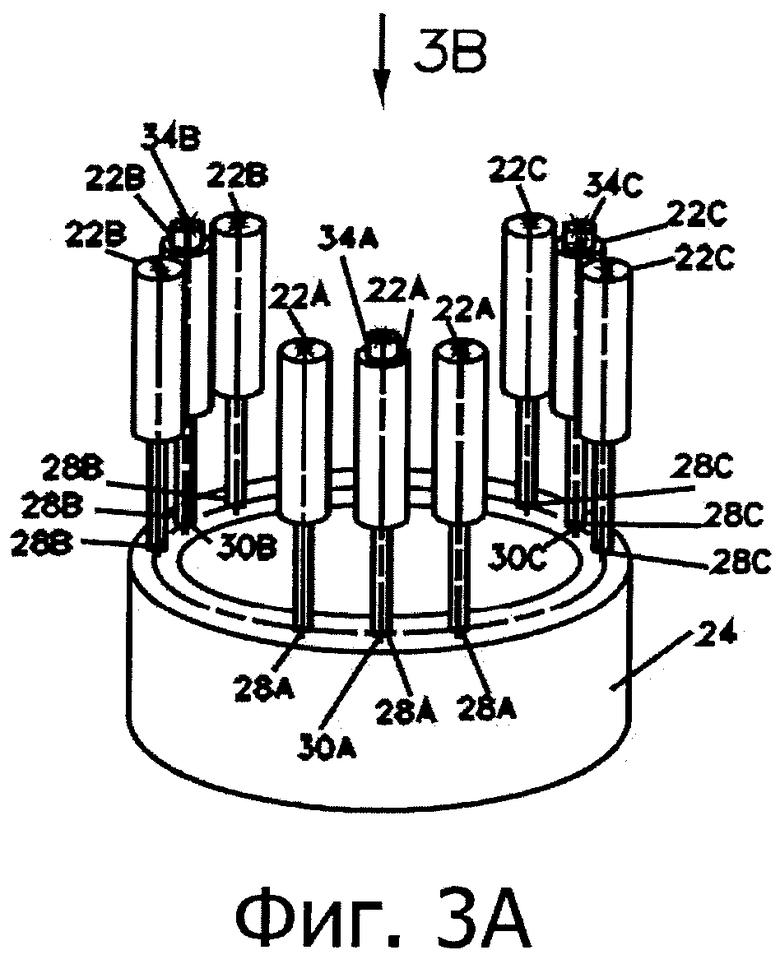
На Фиг.3а приведено перспективное изображение примерного кольцевого затвора и сервоприводной системы с тремя группами сервомоторов, в каждой по три сервомотора, которая может быть использована для перемещения кольцевого затвора, показанного на Фиг.1.
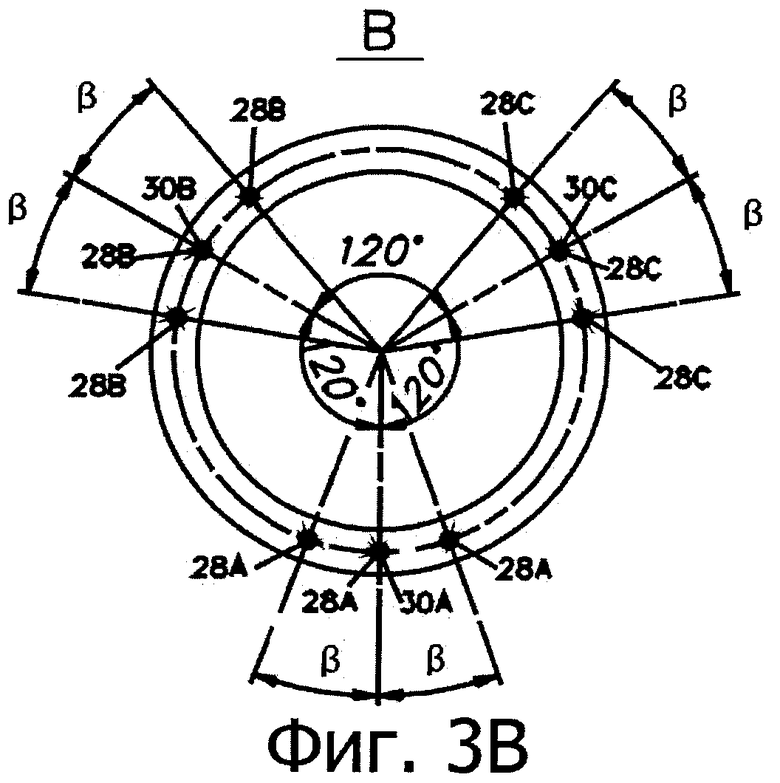
На Фиг.3В представлен вид сверху примерного кольцевого затвора и сервоприводной системы с тремя группами сервомоторов, в каждой по три сервомотора, которая может быть использована для перемещения кольцевого затвора, показанного на Фиг.1.
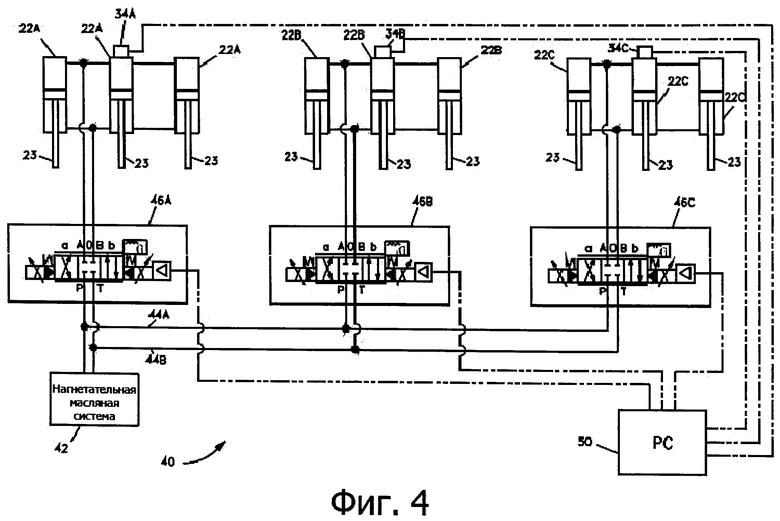
На Фиг.4 показана примерная комбинированная принципиальная схема системы управления, которую можно использовать для управления примерным кольцевым затвором, показанным на Фиг.2 и 3.
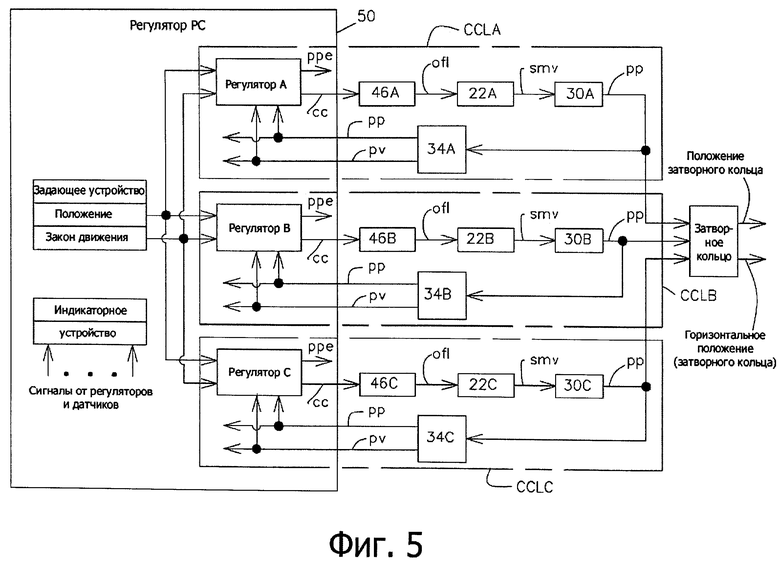
На Фиг.5 показана структурная схема примерной системы управления, которую можно использовать для управления примерным кольцевым затвором, показанным на Фиг.2 и 3.
Осуществление изобретения
Для обеспечения надлежащего функционирования затворного кольца во время работы предусмотрена система управления, которая контролирует перемещение затворного кольца и сохраняет горизонтальное положение затворного кольца с достаточной степенью точности при его перемещениях между открытым и закрытым положениями. Горизонтальная ориентация затворного кольца предотвращает возможность его заклинивания во время движения. Кроме того, для обеспечения надлежащего функционирования затворного кольца в процессе работы система управления, контролирующая перемещение затворного кольца, ограничивает его деформацию, что также позволяет избежать заклинивания при оказании значительного силового воздействия на затворное кольцо для его перемещения. Вследствие данных ограничений и с целью обеспечения правильной двухмерной ориентации затворного кольца во время перемещения, системы привода затворного кольца используют более трех сервомоторов.
В системе управления кольцевым затвором, раскрытой в настоящем описании, используются три идентичных и раздельных замкнутых позиционных контура управления, с высокой точностью контролирующие вертикальные координаты трех контрольных точек. Данные контрольные точки размещены на одинаковом расстоянии друг от друга по периметру затворного кольца. Вертикальные координаты данных контрольных точек однозначно определяют горизонтальную ориентацию затворного кольца. Позиционные контуры управления получают одинаковые входные сигналы и функционируют совместно, чтобы осуществить перемещение кольцевого затвора между закрытым и открытым положениями. Благодаря высокой точности позиционных контуров управления, смещение контрольных точек при перемещении является незначительным, и затворное кольцо сохраняет свою горизонтальную ориентацию в заданных пределах.
В некоторых примерах, каждый позиционный контур управления содержит отдельную группу сервомоторов (например, гидравлических цилиндров). Каждая группа сервомоторов включает в себя два или более отдельных сервомотора, соединенных с затворным кольцом для его перемещения. Каждая группа сервомоторов служит для перемещения одной из трех контрольных точек. Каждый позиционный контур управления также содержит датчик обратной связи по положению/скорости, связанный со своей соответствующей контрольной точкой. Работой сервомоторов в отдельной группе управляет клапан управления. В некоторых примерах, сервомоторы в группе гидравлически параллельно соединены друг с другом. В некоторых примерах, электрический регулятор управляет работой клапана управления и закрывает позиционный контур управления посредством обратной связи от датчика положения/скорости.
Раскрываемая примерная система управления кольцевым затвором по своей конструкции проще применяемых в настоящее время систем управления кольцевым затвором, поскольку данная система не требует наличия механических связей между всеми сервомоторами и не требует отдельного клапана управления для каждого сервомотора. В силу этого, предлагаемая примерная система управления содержит меньшее число компонентов, ее сборка проще, а надежность выше. Кроме того, примерная система управления, в которой используются три независимых контура управления, является статически определимой, поскольку контуры управления управляют положением трех контрольных точек на затворном кольце. Статическая определимость системы обеспечивает возможность простой и точной настройки замкнутых контуров управления, что обеспечивает повышение степени надежности. Описываемая здесь система управления кольцевым затвором содержит меньшее число компонентов, становится статически определимой, что обеспечивает более простую и точную настройку замкнутых контуров управления, и в ней используются лишь три независимых канала управления, которые могут быть легко настроены. Вышеупомянутые отличительные признаки обеспечивают более высокую надежность системы управления кольцевым затвором при ее работе.
На Фиг.1 представлено вертикальное сечение примерной турбинной установки 10, используемой в гидроэнергетической установке. Турбинная установка 10 используется для выработки электроэнергии за счет использования энергии воды, перетекающей из расположенного вверху по течению водоема типа реки или озера по напорному трубопроводу сквозь турбинную систему 10 в расположенный внизу по течению водоем, например в реку (не показано). Спиральный корпус 16 соединен с расположенным выше по течению напорным трубопроводом, из которого поступает вода для привода турбины 21. Как показано на Фиг.1, лопасти 18 направляющего аппарата 20, установленные между спиральным корпусом 16 и корпусом 17 турбины, служат для направления потока воды к ротору гидротурбины равномерно со всех сторон по окружности корпуса 17 в процессе работы турбины 21. Затворное кольцо 24 представляет собой относительно тонкостенный, короткий, жесткий цилиндр, окружающий турбину. В закрытом положении затворное кольцо 24 блокирует поступление потока воды в турбину. В открытом положении затворное кольцо 24 вытягивается из канала для прохода воды.
Примерная турбинная система 10 содержит систему кольцевого затвора с несколькими сервомоторами 22, механически соединенными с затворным кольцом 24 с помощью поршневых штоков 23. Несмотря на то, что на Фиг.1 показаны лишь два сервомотора 22, система кольцевого затвора может содержать шесть и более сервомоторов. Каждый сервомотор 22 включает в себя гидравлический цилиндр, который приводит в действие поршневой шток 23, соединенный с затворным кольцом 24. Затворное кольцо 24, показанное на Фиг.1, находится в полностью вытянутом (полностью открытом) положении, при котором затворное кольцо 24 полностью удалено из канала подачи жидкости из спирального корпуса (улитки) 16 в корпус 17 турбины. Сервомоторы 22 работают совместно, заставляя затворное кольцо 24 переместиться вниз и войти в канал подачи жидкости, уменьшая расход воды, поступающей из спирального корпуса 16 в корпус 17 турбины, или полностью перекрывая этот расход, когда затворное кольцо 24 находится в свое полностью закрытое (невытянутое) положение. В частности, когда затворное кольцо 24 находится в закрытом положении, оно полностью расположено в канале для прохода воды между местом крепления спирального корпуса 16 и лопастями 18 направляющего аппарата 20. Система управления кольцевым затвором перемещает затворное кольцо 24 в вертикальном направлении, чтобы открыть или полностью закрыть доступ воды к лопастям 18 направляющего аппарата турбины.
Для сохранения горизонтального положения затворного кольца 24 с заданной степенью точностью во время перемещения затворного кольца 24 между открытым и закрытым положениями, в некоторых способах осуществления изобретения описываемая здесь примерная система управления кольцевым затвором управляет работой или перемещением затворного кольца 24 путем управления по отдельности тремя идентичными группами сервомоторов, соединенных с затворным кольцом 24. Каждая группа сервомоторов может включать в себя два или более отдельных сервомотора, соединенных с шарнирными точками по периметру затворного кольца 24. Поскольку каждая группа сервомоторов 22А, 22В, 22С содержит более одного сервомотора, система 40 управления кольцевым затвором может использовать достаточное количество сервомоторов для обеспечения мощности или усилия для перемещения затворного кольца 24 при сохранении его горизонтальной ориентации с достаточной степенью точности. Количество сервомоторов в группе сервомоторов может быть любым, например, оно может равняться двум, трем, четырем и т.д. Однако в рассматриваемых вариантах осуществления количество сервомоторов в каждой из различных групп является одинаковым. Предпочтительно, чтобы каждая сервомоторная группа включала сервомоторы одного и того же типа и размера. Размеры сервомоторов могут быть разными, но в каждой из различных сервомоторных групп должны быть пары сервомоторов одинакового размера. Кроме того, сервомоторы одной пары должны быть расположены симметрично относительно плоскости, пересекающей соответствующую контрольную точку и проходящей через ось затворного кольца. В способах осуществления, в которых сервомоторная группа содержит нечетное количество сервомоторов, один сервомотор не имеет пары. В некоторых способах осуществления сервомоторные группы являются идентичными.
На Фиг.2А, 2В, 3А и 3В показаны два примера осуществления данного изобретения с различной конфигурацией сервомоторных групп, датчиков обратной связи по положению/скорости, контрольных точек и точек соединения, предназначенных для управления затворным кольцом 24, представленным на Фиг.1. На Фиг.2а и 2В представлены способы осуществления, при которых число сервомоторов в группе равно семи. На Фиг.3А и 3В представлен способ осуществления, при котором количество сервомоторов в группе является нечетным. Установлены три контрольные точки 30А, 30В, 30С, распределенные по окружности затворного кольца 24 на одинаковом расстоянии друг от друга. Точки соединения 28А, 28В и 28С сервомоторных групп расположены симметрично относительно одной из трех плоскостей, проходящих через соответствующие контрольные точки 30А, 30В, 30С сервомоторных групп и через ось затворного кольца 24. Сервомоторы 22А, 22В и 22С соединены с затворным кольцом 24 в соответствующих точках соединения 28A, 28B, 28C с помощью поршневых штоков 23. Три датчика обратной связи по положению/скорости 34А, 34В, 34С закреплены на затворном кольце 24 в соответствующих контрольных точках 30А, 30В, 30С.
В способе осуществления изобретения, показанном на Фиг.2В, линии, ведущие от оси симметрии к контрольным точкам 30А, 30В и 30С, расположены под углом 120° относительно друг друга, так что данные контрольные точки 30А, 30В и 30С находятся на одинаковом расстоянии друг от друга по периферической поверхности кольцевого затвора 24. Как показано на Фиг.2В, сервомоторы каждой сервомоторной группы расположены под углом α друг к другу на периферической поверхности кольцевого затвора 24. Например, точки соединения 28А, соответствующие местам подсоединения сервомоторов 22А, расположены под углом α относительно друг друга, причем каждая точка соединения 28А расположена на одинаковом расстоянии от контрольной точки 30А. Симметричное размещение сервомоторов 22А относительно контрольной точки 30А обеспечивает уравновешенность усилий, прикладываемых для перемещения кольцевого затвора 24. В приведенном примере угол α составляет приблизительно 60°. В других вариантах осуществления, данный угол α может быть больше или меньше 60°. Далее, в способах осуществления, в которых используются дополнительные сервомоторы, сервомоторы размещают таким образом, чтобы обеспечить равномерное распределение воздействующих на кольцевой затвор 24 усилий относительно контрольных точек 30А, 30В, и 30С.
При четном числе сервомоторов в группе датчики обратной связи по положению/скорости 34А, 34В и 34С соединяют с контрольными точками с помощью кронштейнов, как показано на Фиг.2А.
Как показано на Фиг.3А, при нечетном количестве сервомоторов в группе, датчики обратной связи по положению/скорости 34А, 34В и 34С являются частью сервомоторов, которые подсоединены к соответствующим контрольным точкам 30А, 30В и 30С с помощью поршневых штоков 23. На Фиг.3В показан вид сверху кольцевого затвора 24, представленного на Фиг.3А. Показанный способ осуществления также иллюстрирует положение соответствующих точек соединения 28А, 28В, и 28С сервомоторов 22А, 22В, и 22С. В данном способе осуществления все точки соединения в сервомоторной группе отделены друг от друга углом β. В некоторых способах осуществления угол β может составлять около 30° или менее 30°. В данном примере угол β - это угол между прямыми, проходящими через соответствующие контрольные точки 30А, 30В и 30С и центральную или продольную ось кольцевого затвора 24.
Датчики обратной связи по положению/скорости, используемые в описываемой здесь систему управления, являются датчиками бесконтактного типа. Данные датчики обратной связи по положению/скорости измеряют положение и/или скорость перемещения затворного кольца 24 посредством измерения смещения кольца с помощью эффекта взаимодействия между постоянным магнитом и волноводом. Такие датчики генерируют выходной сигнал по положению и скорости перемещения.
На Фиг.4 представлена комбинированная принципиальная схема описываемой здесь системы управления для способа осуществления, показанного на Фиг.3. Сервомоторы в каждой сервомоторной группе гидравлически параллельно соединены друг с другом и соединены вместе с соответствующими редукционными клапанами. Три редукционных клапана 46А, 46В, 46С по отдельности соединены с программируемым регулятором 50.
Датчики обратной связи по положению/скорости 34А, 34В, 34С также по отдельности соединены с программируемым регулятором 50. Датчики обратной связи по положению/скорости 34А, 34В, 34С встроены в сервомотор и по отдельности соединены с контрольными точками. К редукционным клапанам подводится масло под давлением по маслопроводу 44А; отвод масла производится по возвратному трубопроводу 44В через нагнетательную масляную систему 42.
На Фиг.5 показана структурная схема системы управления, осуществляющей управление кольцевым затвором, показанным на Фиг.2 и 3. На Фиг.5 раскрыты связи между функциональными элементами системы управления кольцевого затвора.
Рассматриваемая в данном описании система управления кольцевым затвором состоит из трех независимых замкнутых позиционных контуров управления CCLA, CCLB, CCLC. Данные замкнутые позиционные контуры управления являются идентичными. Поступающие от регулятора 50 выходные сигналы управляют сервоклапанами (редукционными клапанами) 46А, 46В, 46С с целью подачи соответствующего расхода масла к группам соответствующих сервомоторов 22А, 22В и 22С для обеспечения перемещения групп сервомоторов со скоростью "smv" и изменения положения (координат по вертикали) "pp" соответствующих контрольных точек 30А, 30В и 30С. Датчики обратной связи по положению/скорости 34А, 34В, 34С генерируют выходные сигналы по текущему положению (вертикальным координатам) "pp" и выходные сигналы по скорости "pv" соответствующих контрольных точек 30А, 30В и 30С. Электрические регуляторы А, В, С по выходным сигналам положения от датчиков обратной связи по положению/скорости приводят в действие три позиционных замкнутых контура управления CCLA, CCLB, CCLC. Выходные сигналы скорости от датчиков обратной связи могут быть использованы для уменьшения погрешности определения места позиционными замкнутыми контурами управления путем включения внутренней обратной связи данных замкнутых контуров управления.
Поскольку три контрольные точки 30А, 30В, 30С равномерно разнесены по периферии затворного кольца 24, замкнутые контуры управления определяют и контролируют вертикальные координаты данных трех контрольных точек и, следовательно, определяют положение и обеспечивают горизонтальное положение затворного кольца 24. При управлении координатами трех контрольных точек 30А, 30В, 30С, как описано выше, замкнутые контуры управления являются независимыми друг от друга, так как система управления 40 кольцевым затвором статически определима, и любые незначительные вертикальные перемещения одной контрольной точки не вызывают вертикальных перемещений других контрольных точек. Таким образом, система управления 40 кольцевым затвором состоит из трех независимых позиционных замкнутых контуров управления, каждым из которых легко оперировать и управлять с высокой точностью. Замкнутые контуры управления получают одинаковые входные сигналы, так что отклонение по горизонтальной ориентации затворного кольца определяется разностями вертикального отклонения контрольных точек. Дополнительно или альтернативно, отклонение горизонтальной ориентации затворного кольца определяется разностями позиционных погрешностей позиционных замкнутых контуров управления CCLA, CCLB, CCLC. Следовательно, синхронизация перемещения трех контрольных точек 30А, 30В, 30С, определяющая горизонтальную ориентацию затворного кольца 24, обеспечивается высокой точностью трех независимых позиционных контуров управления, которые могут также корректировать относительные или абсолютные вертикальные координаты контрольных точек в процессе работы кольцевого затвора 24.

Изобретение относится к оборудованию гидроэлектростанций и более конкретно к системам управления кольцевым затвором турбинной установки гидроэлектростанции. Система управления кольцевым затвором содержит первую сервомоторную группу, вторую сервомоторную группу и третью сервомоторную группу. Каждая сервомоторная группа связана с соответствующей контрольной точкой, расположенной на кольцевом торце кольцевого затвора. Сервомоторы каждой сервомоторной группы соединены с кольцевым торцом кольцевого затвора в соответствующих точках соединения. Датчик соединен с кольцевым торцом кольцевого затвора. Клапан управления установлен между источником гидродинамического давления и, по меньшей мере, двумя исполнительными механизмами. Регулятор соединен с каждым из клапанов управления и с каждым из датчиков. Регулятор управляет по отдельности замкнутым контуром управления каждой сервомоторной группы с целью регулирования положения контрольных точек и сохранения горизонтальной ориентации кольцевого затвора. Изобретение направлено на обеспечение надлежащего функционирования затворного кольца во время работы. 3 н. и 17 з.п. ф-лы, 7 ил.
1. Система управления кольцевым затвором для управления перемещением кольцевого затвора между открытым и закрытым положениями, содержащая три группы сервомоторов, каждая из которых связана с одной из трех контрольных точек, расположенных по окружности затворного кольца, и содержит сервомоторы, гидравлически параллельно соединенные друг с другом и соединенные с затворным кольцом в точках соединения на затворном кольце, размещенные по периферии затворного кольца симметрично относительно плоскости, проходящей через соответствующую контрольную точку и ось симметрии затворного кольца; датчик, подключенный для определения положения соответствующей контрольной точки сервомоторной группы; клапан управления, подключенный между гидравлическим источником давления и сервомоторами в сервомоторной группе для регулирования расхода жидкости под давлением, подаваемой к сервомоторам данной сервомоторной группы; и регулятор, подключенный к каждому из управляющих клапанов и к каждому датчику, служащий для того, чтобы три отдельных позиционных замкнутых контура управления могли осуществлять управление положением контрольных точек, при этом данные позиционные замкнутые контуры управления работают одновременно, регулируя положение контрольных точек на затворном кольце для сохранения горизонтальной ориентации затворного кольца с заданной степенью точности.
2. Система управления кольцевым затвором по п.1, отличающаяся тем, что контрольные точки расположены под углом 120 градусов относительно друг друга на периферии затворного кольца.
3. Система управления кольцевым затвором по п.2, отличающаяся тем, что каждая сервомоторная группа содержит два сервомотора.
4. Система управления кольцевым затвором по п.3, отличающаяся тем, что два сервомотора каждой сервомоторной группы присоединены к затворному кольцу в точках соединения, расположенных под углом 60 градусов или менее относительно друг друга по окружности затворного кольца на одинаковом расстоянии по обе стороны от соответствующей контрольной точки.
5. Система управления кольцевым затвором по п.1, отличающаяся тем, что каждая сервомоторная группа содержит три сервомотора.
6. Система управления кольцевым затвором по п.5, отличающаяся тем, что первый и второй сервомоторы каждой сервомоторной группы соединены с затворным кольцом в точках соединения, расположенных под углом 60 градусов или менее относительно друг друга по окружности затворного кольца на одинаковых расстояниях с обеих сторон от соответствующей контрольной точки, а третий сервомотор каждой сервомоторной группы соединен с затворным кольцом в точке соединения, которая совпадает с соответствующей контрольной точкой.
7. Система управления кольцевым затвором по п.1, отличающаяся тем, что каждая сервомоторная группа содержит четное число сервомоторов, включающее в себя одну или несколько пар сервомоторов, причем сервомоторы каждой пары соединены с затворным кольцом в точках соединения на окружности затворного кольца, расположенных на одинаковом расстоянии по обе стороны от соответствующей контрольной точки.
8. Система управления кольцевым затвором по п.7, отличающаяся тем, что каждая сервомоторная группа содержит одну или несколько пар сервомоторов, причем каждый из расположенных друг с другом комплектов сервомоторов в каждой сервомоторной группе соединен с затворным кольцом в точках соединения, расположенных на одинаковых расстояниях друг от друга.
9. Система управления кольцевым затвором по п.1, отличающаяся тем, что каждая сервомоторная группа содержит нечетное количество сервомоторов, включающее в себя одну или несколько пар сервомоторов, причем сервомоторы каждой пары соединены с затворным кольцом в точках соединения на окружности затворного кольца, находящихся на одинаковых расстояниях от соответствующей контрольной точки, а также один сервомотор, соединенный с затворным кольцом в точке соединения, совпадающей с соответствующей контрольной точкой.
10. Система управления кольцевым затвором по п.1, отличающаяся тем, что датчики измеряют перемещение поршневого штока, соединенного с соответствующей контрольной точкой.
11. Система управления кольцевым затвором по п.1, отличающаяся тем, что регулятор одновременно контролирует положения по вертикали трех контрольных точек на затворном кольце с целью сохранения горизонтальной ориентации данного затворного кольца с заданной степенью точности при его перемещении.
12. Система управления кольцевым затвором по п.1, отличающаяся тем, что используемые сервомоторы представляют собой сервомоторы линейного типа.
13. Способ управления положением кольцевого затвора с помощью определенного количества сервомоторов, соединенных с затворным кольцом в точках соединения, расположенных по окружности затворного кольца, предусматривающий измерение перемещения или положения каждой из трех контрольных точек для формирования трех сигналов обратной связи и одновременное использование входных управляющих сигналов для регулирования вертикального положения контрольных точек и сохранения горизонтального положения затворного кольца.
14. Способ по п.13, отличающийся тем, что использование управляющих сигналов для регулирования вертикального положения контрольных точек включает в себя подачу каждого из управляющих сигналов к разным клапанам управления, каждый из которых установлен между источником гидравлического давления и одной из сервомоторных групп, с целью обеспечения возможности регулирования одним и тем же клапаном управления расхода гидравлической жидкости, поступающего ко всем сервомоторам одной из сервомоторных групп.
15. Способ по п.13, отличающийся тем, что измерение перемещения или положения каждой из трех контрольных точек осуществляется посредством измерения перемещения или положения поршневых штоков или кронштейнов, прикрепленных к каждой из трех контрольных точек.
16. Система управления кольцевым затвором, включающая в себя первую сервомоторную группу, вторую сервомоторную группу и третью сервомоторную группу, каждая из которых связана с соответствующей контрольной точкой, расположенной на кольцевом торце кольцевого затвора, причем каждая из вышеупомянутых групп исполнительных механизмов связана с сервомоторами сервомоторных групп, соединенных с кольцевым торцом кольцевого затвора в соответствующих точках соединения, датчиком, соединенным с кольцевым торцом кольцевого затвора, и клапаном управления, соединенным с источником гидравлического давления и, по меньшей мере, с двумя исполнительными механизмами; и регулятор, соединенный с каждым из клапанов управления и каждым из датчиков, управляющий по отдельности замкнутым контуром управления каждой сервомоторной группы с целью регулирования положения контрольных точек и сохранения горизонтальной ориентации кольцевого затвора.
17. Система управления кольцевым затвором по п.16, отличающаяся тем, что соответствующие контрольные точки для сервомоторных групп равномерно разнесены по окружности кольцевого торца кольцевого затвора.
18. Система управления кольцевым затвором по п.16, отличающаяся тем, что каждый из датчиков служит для определения положения соответствующей контрольной точки определенной сервомоторной группы, связанной с данным датчиком обратной связи по положению/скорости.
19. Система управления кольцевым затвором по п.16, отличающаяся тем, что клапан управления осуществляет регулирование расхода гидрожидкости под давлением, подаваемой к сервомоторам определенной сервомоторной группы.
20. Система управления кольцевым затвором по п.16, отличающаяся тем, что точки соединения каждой сервомоторной группы расположены под углом менее чем 60 градусов одна к другой на кольцевом торце кольцевого затвора.
| WO 9943954 A1, 09.02.1999 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ ПОЛУЧЕНИЯ АППЛИКАЦИЙ ИЗ ДРАГОЦЕННЫХ МЕТАЛЛОВ НА ЭМАЛИ ЮВЕЛИРНЫХ ИЗДЕЛИЙ | 1997 |
|
RU2119290C1 |
| 0 |
|
SU401819A1 | |

