ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области технологий сетей связи, и в частности к устройству управляемого объекта, способу и системе самооптимизации.
УРОВЕНЬ ТЕХНИКИ
Сетевая оптимизация является одним из важнейших сценариев ежедневного обслуживания сети связи. Посредством сбора данных, таких как ключевые показатели работы (KPI), отслеживания и отчета об измерениях (MR) существующей сети отслеживается состояние работоспособности сети, вовремя обнаруживаются такие проблемы, как отсутствие соседа, пробел в покрытии и частотные помехи, которые влияют на эксплуатационные характеристики сети, и в соответствии с этим выполняется настройка с тем, чтобы достичь цели улучшения эксплуатационной характеристики сети.
Во время стандартной сетевой оптимизации различные средства сетевой оптимизации используются для анализа и сортировки данных с тем, чтобы локализовывать и обнаруживать проблемы, а обслуживающий персонал предлагает решение проблемы сетевой оптимизации в соответствии с опытом и на основе данных. Такой сценарий является сложным, процесс усложняется, при этом требования к квалификации обслуживающего персонала высоки.
Для Системы долгосрочного развития (LTE) технологий беспроводной связи следующего поколения, которая характеризуется широким применением сетевых элементов (NE), использованием полного протокола сети интернет (IP), комбинацией устройств различных изготовителей и различных стандартов, сценарии эксплуатации и обслуживания, встречающиеся при стандартной оптимизации сетей, являются более сложными. Чтобы избежать огромных затрат, вызванных традиционной оптимизацией сетей, которая, главным образом, зависит от опыта, оценки и работы обслуживающего персонала, Проект партнерства третьего поколения (3GPP) - организация по стандартизации технологий связи следующего поколения - предлагает технологии самоорганизующейся сети (SON), то есть опыт и интеллект специалистов объединяются в программы таким образом, чтобы сеть обладала возможностями автоматического сбора данных, автоматического анализа и выявления проблем и автоматического выполнения настройки. Технологии SON в некоторой мере уменьшают ручное вмешательство, повышают требования к квалификации обслуживающего персонала и, в конечном счете, достигают цели снижения расходов на эксплуатацию и обслуживание сети.
В технологиях SON самооптимизация как важная функция SON охватывает широкую область применимости, при этом к видам самооптимизации, исследуемым в настоящее время 3GPP, относятся оптимизация передачи обслуживания, оптимизация распределения нагрузки, оптимизация контроля помех, оптимизация пропускной способности и покрытия, оптимизация канала произвольного доступа (RACH) и оптимизация энергосбережения.
В известных технических решениях в различных случаях самооптимизации после формулировки и анализа принципов оптимизации для реализации процесса оптимизации команда оптимизации исполняется неавтоматически.
В уровне техники имеются по меньшей мере следующие недостатки: односторонний интерфейс (Itf-N) между системой управления сетью (NMS) и системой управления элементами (EMS) не обеспечивает поддержки управления оперативными функциями самооптимизации. Если пользователю требуется выполнить самооптимизацию системы связи, необходимо, чтобы возможные параметры оптимизации были получены с помощью неавтоматического анализа, при этом самооптимизация выполняется путем отправки соответствующих команд изменения конфигурации, что, как правило, повышает сложность и время обработки процесса самооптимизации.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном варианте осуществления настоящего изобретения предлагается способ самооптимизации, который включает в себя выполнение управляемым объектом самооптимизации в соответствии с правилом триггера самооптимизации, которое создается управляющим объектом в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом.
В одном варианте осуществления настоящего изобретения также предлагается управляемый объект, который содержит модуль выполнения самооптимизации, выполненный с возможностью выполнения самооптимизации в соответствии с правилом триггера самооптимизации, которое создается управляющим объектом в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом.
В другом варианте осуществления настоящего изобретения дополнительно предлагается система самооптимизации, которая содержит управляемый объект, выполненный с возможностью выполнения самооптимизации в соответствии с правилом триггера самооптимизации, которое создается управляющим объектом в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом.
В рассматриваемых технических решениях управляемый объект выполняет самооптимизацию в соответствии с правилом триггера самооптимизации, поэтому управляемый объект не обязательно должен выполнять самооптимизацию в режиме приема команды, что позволяет избежать выполнения самооптимизации в режиме, в котором пользователь отправляет соответствующую команду изменения конфигурации, таким образом значительно уменьшая сложность процесса самооптимизации и сокращая время ручной обработки самооптимизации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
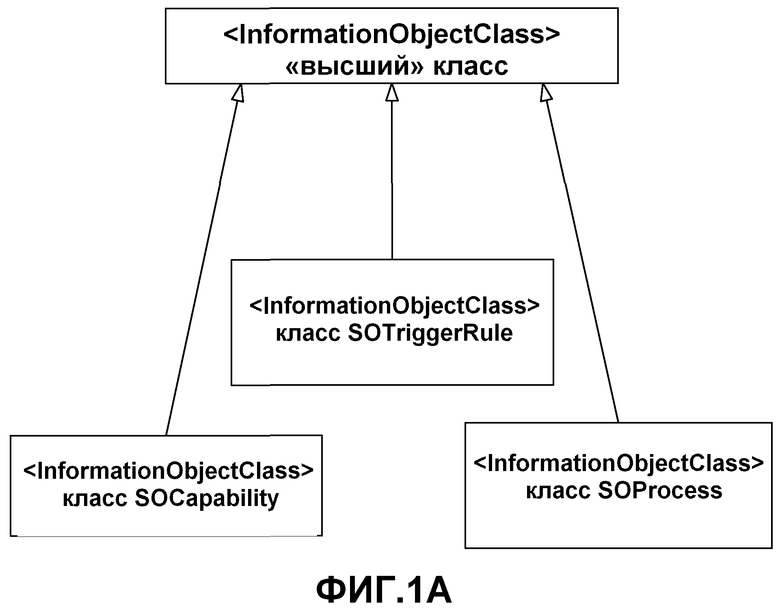
Фиг.1А представляет собой блок-схему наследования класса возможности управления самооптимизацией (SOManagementCapability), класса правила триггера самооптимизации (SOTriggerRule) и класса процесса самооптимизации (SOProcess) в способе самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения;
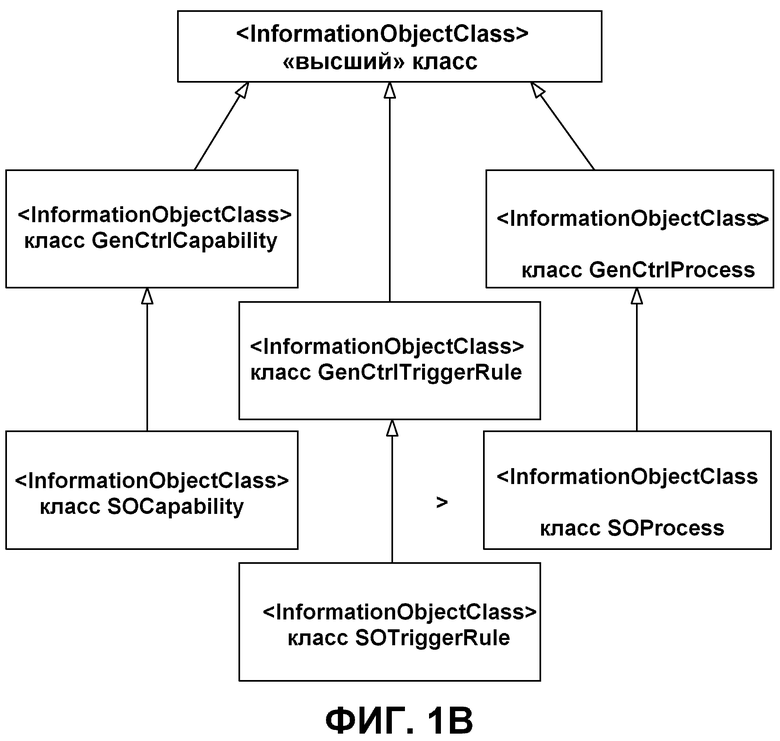
Фиг.1В представляет собой другую блок-схему наследования класса SOManagementCapability, класса SOTriggerRule и класса SOProcess в способе самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения;
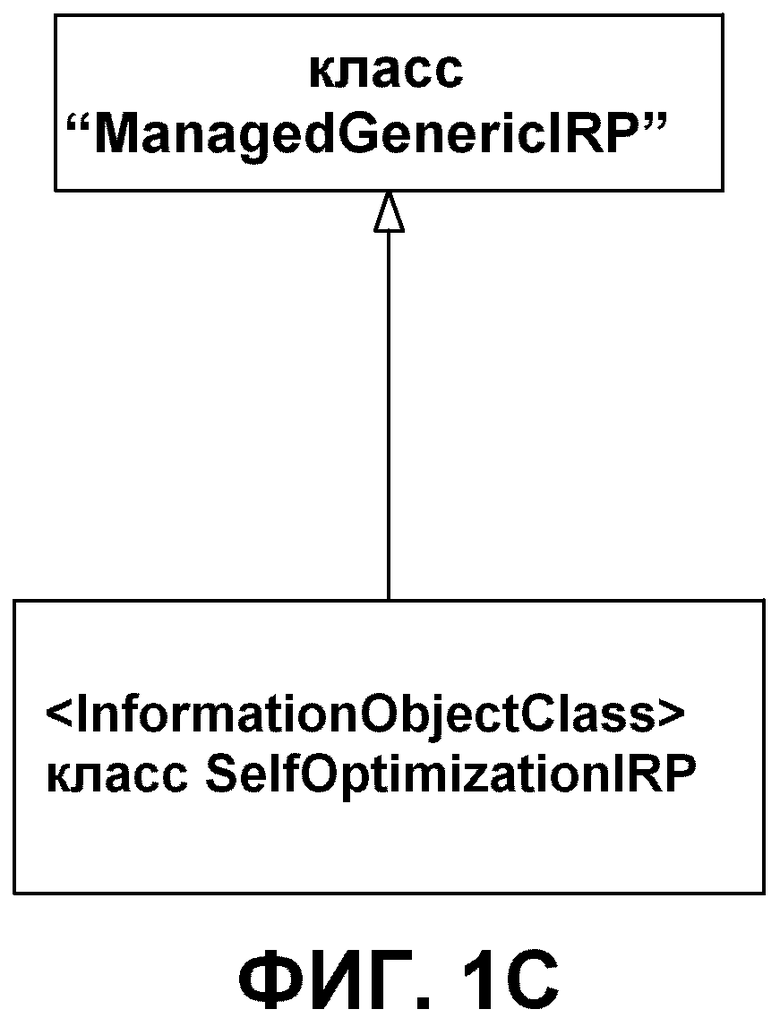
Фиг.1С представляет собой блок-схему наследования класса объединенной опорной точки самооптимизации (SelfOptimizationIRP) в способе самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения;
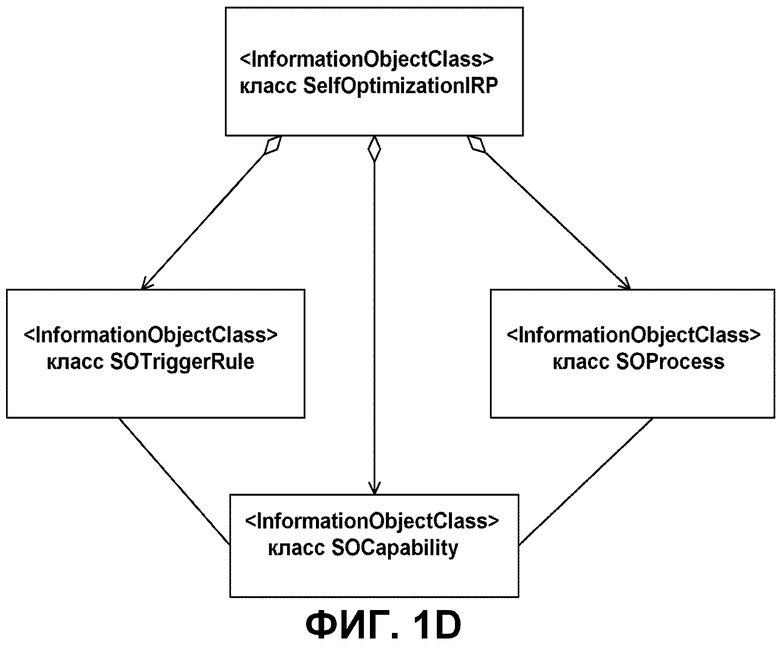
Фиг.1D представляет собой блок-схему зависимостей класса SelfOptimizationIRP, класса SOManagementCapability, класса SOTriggerRule и класса SOProcess в способе самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения;
Фиг.2 представляет собой структурную схему другого способа самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения;
Фиг.3 представляет собой структурную схему еще одного способа самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения; и
Фиг.4 представляет собой принципиальную схему построения способа самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Способ самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения включает в себя выполнение управляемым объектом самооптимизации в соответствии с правилом триггера самооптимизации. Например, если в соответствии с правилом триггера самооптимизации установленным типом самооптимизации является распределение нагрузки и если управляемый объект соответствует состоянию триггера, установленному в соответствии с правилом триггера самооптимизации, управляемый объект выполняет оптимизацию распределения нагрузки.
В данном варианте осуществления управляемый объект выполняет самооптимизацию в соответствии с правилом триггера самооптимизации, тем самым предотвращая оптимизацию, выполняемую путем ручного ввода команды изменения конфигурации, значительно уменьшая сложность процесса самооптимизации и сокращая время ручной обработки самооптимизации.
В рассматриваемом варианте осуществления правило триггера самооптимизации может устанавливаться управляемым объектом в соответствии с возможностями управляемого объекта по умолчанию. Например, если управляемый объект не устанавливает правило триггера самооптимизации, управляемый объект может использовать возможности, поддерживаемые управляемым объектом, в качестве заданного по умолчанию правила триггера самооптимизации.
В альтернативном варианте осуществления правило триггера самооптимизации может также создаваться управляющим объектом. Ниже приводятся подробные описания.
Сеть связи содержит сетевые элементы (NE). NE предоставляются различными поставщиками, при этом каждый из поставщиков предоставляет EMS для управления NE данного поставщика с помощью своего соответствующего частного интерфейса, при этом оператор осуществляет единое управление по сети с помощью NMS. В данном варианте осуществления настоящего изобретения различные классы, выделенные для самооптимизации, конфигурируются между NMS и EMS, при этом данные классы используются в различных случаях самооптимизации. Для удобства описания в данном варианте осуществления настоящего изобретения диспетчер объединенной опорной точки (IRP) IRPManager представляет собой инициатор операций, то есть управляющий объект, такой как NMS, а агент IRP IRPAgent представляет собой исполнитель операций, то есть управляемый объект, такой как EMS и NE. См. IRPManager и IRPAgent в спецификациях на 3GPP. Устанавливаемые классы могут включать в себя класс возможности управления самооптимизацией (SOManagementCapability), класс правила триггера самооптимизации (SOTriggerRule), класс выполнения самооптимизации (SOProcess) и класс операции самооптимизации (SelfOptimizationIRP). Зависимости классов показаны на фиг.1А, фиг.1В, фиг.1С и фиг.1D. Блок-схема зависимостей наследования класса SOManagementCapability, класса SOTriggerRule и класса SOProcess показана на фиг.1А, при этом родительским классом является «высший» класс. В альтернативном варианте осуществления блок-схема зависимостей наследования класса SOManagementCapability, класса SOTriggerRule и класса SOProcess показана на фиг.1В. Родительским классом для класса SOTriggerRule является класс «Правила триггера общего управления» (“GenCtrlTriggerRule”), а родительским классом для класса SOProcess является класс «Процесса общего управления» (“GenCtrlProcess”). Как показано на фиг.1С, родительским классом для класса SelfOptimizationIRP является класс «Управляемой основной объединенной опорной точки» (“ManagedGenericIRP”). Зависимости между классом SelfOptimizationIRP и классом SOManagementCapability, классом SOTriggerRule и классом SOProcess показаны на фиг.1D. Класс SelfOptimizationIRP включает в себя соответствующие операции по управлению функцией самооптимизации. SOTriggerRule устанавливает специальное правило триггера, основанное на функциях, обеспечиваемых классом SOManagementCapability. При соответствии состоянию, конфигурируемому SOTriggerRule, система автоматически генерирует объект класса SOProcess для осуществления специального процесса выполнения оптимизации.
Класс SOManagementCapability показан в Таблице 1, в которой описана возможность самооптимизации, которую может обеспечить IRPAgent.
Класс SOManagementCapability
об управляемом объекте (CtrlObj-Information)
либо объект, обеспечивающий возможность самооптимизации, которая может представлять
собой управление элементами (ЕМ); атрибут, способный идентифицировать одну или более совместимостей NE; тип NE; и один или более отдельных NE
об индикаторе измерения рабочих характеристик (РМ); и гранулярность политики, поддерживаемую индикатором РМ
В данной таблице и нижеследующих таблицах «М» означает «обязательно».
Класс SOManagementCapability обеспечивается с помощью IRPAgent, и IRPManager не может изменить содержимое класса SOManagementCapability. Класс SOManagementCapability главным образом включает в себя следующую информацию: информацию об управляемом объекте, список поддерживаемых состояний триггера оптимизации и поддерживаемые задачи оптимизации. Список поддерживаемых состояний триггера оптимизации содержит поддерживаемый тип оптимизации, то есть поддерживаемый случай самооптимизации, индикатор РМ, поддерживаемый в состоянии триггера самооптимизации, и гранулярность политики, которая представляет собой измерительный цикл, поддерживаемый индикатором РМ. Поддерживаемый индикатор РМ представляет собой соответствующее РМ, которое может отслеживаться управляемым объектом, таким как EMS и NE. Поддерживаемые задачи самооптимизации включают в себя одну или более задач самооптимизации, при этом, в частности, если поддерживаемых задач самооптимизации множество, зависимости между задачами самооптимизации также включаются. Зависимости существуют в различных формах. Например, различные задачи оптимизации могут иметь различные приоритеты или веса, либо между различными задачами оптимизации имеются некоторые зависимости, определяемые арифметическими операциями, либо между различными задачами оптимизации имеются зависимости, определяемые логическими операциями.
Класс SOTriggerRule в соответствии с Таблицей 2 описывает правило триггера процесса самооптимизации. Правило триггера самооптимизации может включать в себя ID объекта правила триггера самооптимизации, информацию об управляемом объекте (CtrlObjInformation), тип оптимизации (OptimizationType), гранулярность обнаружения оптимизации (optimizationMonitoringGranularity), статистическую информацию обнаружения оптимизации (optimizationMonitoringCounterInfo), информацию о задаче оптимизации (optimizationObjectiveInfo) и подтверждение оптимизации (needConfirmationBeforeOptimization). Следует отметить, что содержимое, дополнительно входящее в правило триггера процесса самооптимизации, может являться одной из частей или какой-либо совокупностью частей содержимого, приведенного в Таблице 2. Атрибут optimizationMonitoringGranularity используется для индикации цикла обнаружения индикатора РМ. Атрибут optimizationMonitoringCounterInfo используется для индикации статистической информации об обнаружении. Данная статистическая информация представляет собой состояние триггера, при котором управляемый объект выполняет самооптимизацию. Если управляемый объект обнаруживает индикатор РМ, используя optimizationMonitoringGranularity в качестве цикла, и обнаруженная статистическая информация соответствует установке optimizationMonitoringCounterInfo в SOTriggerRule, запускается выполнение самооптимизации. Атрибут needConfirmationBeforeOptimization должен устанавливаться независимо от того, требуется ли неавтоматическое подтверждение операции самооптимизации. Если needConfirmationBeforeOptimization устанавливается таким образом, чтобы требовалось неавтоматическое подтверждение, операция самооптимизации может выполняться только после неавтоматического подтверждения перед тем, как управляемый объект выполнит самооптимизацию. Если needConfirmationBeforeOptimization устанавливается таким образом, чтобы не требовалось неавтоматическое подтверждение, то неавтоматическое подтверждение не требуется, и самооптимизация выполняется немедленно.
Класс SOTriggerRule
для различения различных реализаций класса SOTriggerRule
то есть объект
запуска алгоритма самооптимизации, который может представлять собой ЕМS; тип NE; и один
или более отдельных NE
Monitoring-
Granularity
РМ, то есть статистический цикл индикатора
Monitoring-
CounterInfo
ObjectInfo
В соответствии с Таблицей 3, класс SOProcess соответствует процессу выполнения самооптимизации. Атрибуты класса SOProcess включают в себя ID, ID управляемого объекта (CtrlObjectIdentification), ID правила триггера (triggerRuleId) и состояние процесса (processStatus).
Класс SOProcess
Класс SelfOptimizationIRP задает IRP выполнение управления самооптимизацией. Как показано в Таблице 4, функции действия интерфейса, обеспечиваемые SelfOptimizationIRP, включают в себя функцию создания правила триггера (CreateTriggerRule()) и функцию запроса возможности самооптимизации (ListSoCapabilities()). Функции действия интерфейса могут дополнительно включать в себя функцию удаления правила триггера (DeleteTriggerRule()), функцию запроса правила триггера (ListTriggerRule()), функцию изменения правила триггера (ChangeTriggerRule()), функцию запроса процесса самооптимизации (ListProcess()), функцию подтверждения выполнения оптимизации (ConfirmOptimizationExecution()) и функцию завершения процесса самооптимизации (TerminateSOProcess()).
Класс SOOptimizationIRP
ctrlObj
Information: информация об управляемом объекте, который является управляющим объектом NE, способным идентифицировать общий атрибут набора NE, либо одной частью или какой-либо комбинацией информации об одном или более объектах NE;
triggerRule: правило триггера (включая все атрибуты правила триггера самооптимизации; информацию об управляемом объекте, тип самооптимизации, гранулярность обнаружения самооптимизации и состояние триггера самооптимизации)
Result: результат выполнения, установленным значением которого является успех, неудача или информация, указывающая на то, что созданное правило пересекается с существующим правилом.
Когда Result указывает на информацию, которая указывает на то, что созданное правило пересекается с существующим правилом, информация о ID правила триггера включает в себя информацию о ID имеющегося конфликтующего правила триггера
Result: результат выполнения, установленным значением которого является успех или неудача
CtrlObjInformation: запрашиваемая информация об управляемом объекте.
Если эти два параметра являются заданными по умолчанию, то есть не устанавливаются, запрашиваются правила триггера самооптимизации всех управляемых объектов. Если эти два параметра конфигурируются по умолчанию, а не специально, запрашиваются правила триггера самооптимизации всех управляемых объектов.
Если конкретный ID управляемого объекта не задан, запрашиваются все ID
ctrlObj-Information: информация об управляемом объекте
triggerRule: правило триггера (включая все атрибуты правила триггера самооптимизации: информация об управляемом объекте, тип самооптимизации, гранулярность обнаружения самооптимизации
и состояние триггера самооптимизации)
Result: результат выполнения, установленным значением которого является успех, неудача или информация, указывающая на то, что созданное правило пересекается с существующим правилом.
Когда Result указывает на информацию, которая указывает на то, что созданное правило пересекается с существующим правилом, triggerRuleId включает в себя информацию о ID имеющегося конфликтующего правила
Фиг.2 представляет собой структурную схему другого способа самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения. В данном варианте осуществления для запуска процесса самооптимизации используются предварительно конфигурированные интерфейсы, причем процесс включает в себя следующие этапы:
Этап 21: Получение возможности самооптимизации управляемого объекта. В конкретном процессе реализации управляющий объект может запрашивать и получать возможность самооптимизации управляемого объекта (такого как NE) путем активизации функции запроса самооптимизации, такой как ListSOCapabilities().
Этап 22: Создание правила триггера самооптимизации в соответствии с запрашиваемой возможностью самооптимизации управляемого объекта, например, типа самооптимизации, индикатора РМ, который может отслеживаться, и гранулярности политики отслеживания индикатора РМ. Например, в конкретном процессе реализации управляющий объект может создавать правило триггера самооптимизации, такое как тип самооптимизации и состояние триггера самооптимизации, в соответствии с запрашиваемой возможностью самооптимизации управляемого объекта путем активизации функции создания правила триггера, такой как CreateTriggerRule().
Этап 23: Если состояние триггера самооптимизации является соответствующим, управляемый объект выполняет самооптимизацию в соответствии с правилом триггера, созданным на этапе 22. Например, если типом самооптимизации, заданным в правиле триггера, является энергосбережение, управляемый объект выполняет самооптимизацию энергосбережения.
В способе самооптимизации данного варианта осуществления настоящего изобретения возможность самооптимизации управляемого объекта может быть получена управляющим объектом другими средствами. Например, управляющий объект получает возможность самооптимизации управляемого объекта в соответствии с указаниями в руководстве пользователя или содержимым контракта.
Кроме того, следует отметить, что управляющий объект может также создавать правило самооптимизации не в соответствии с возможностью самооптимизации управляемого объекта, а, например, в соответствии с конфигурациями управляющего объекта или сохраненной соответствующей информацией.
Способ самооптимизации данного варианта осуществления настоящего изобретения может дополнительно включать в себя запрос управляющим объектом существующего в настоящий момент правила самооптимизации управляемого объекта. Например, в конкретном процессе реализации существующее в настоящий момент правило самооптимизации управляемого объекта может запрашиваться путем активации функции запроса правила триггера в классе SOOptimizationIRP для запроса правила триггера самооптимизации, например ListTriggerRule().
Способ самооптимизации данного варианта осуществления настоящего изобретения может дополнительно включать в себя запуск управляемым объектом процесса самооптимизации в соответствии с правилом триггера самооптимизации, если состояния являются соответствующими. Если атрибут needConfirmation-BeforeOptimization класса SOTriggerRule установлен в значение ”true”, выполнение процесса самооптимизации приостанавливается до того, как управляемый объект выполнит конкретную операцию изменения самооптимизации, пока управляющий объект не подтвердит предложение о выполнении самооптимизации, отправляемое управляемым объектом. Например, в конкретном процессе реализации управляющий объект может подтвердить предложение о выполнении самооптимизации, отправляемое управляемым объектом, путем активации функции подтверждения выполнения оптимизации, такой как ConfirmOptimizationExecution(). Как показано на фиг.3, после того как предложение о выполнении самооптимизации подтверждается управляющим объектом, управляемый объект выполняет самооптимизацию.
Способ самооптимизации данного варианта осуществления настоящего изобретения может дополнительно включать в себя запрос управляющим объектом информации о состоянии процесса самооптимизации. Например, в конкретном процессе реализации управляющий объект может запрашивать информацию о состоянии процесса самооптимизации путем активации функции запроса процесса самооптимизации в классе SOOptimizationIRP для запроса процесса самооптимизации, такой как ListSOProcess().
Другой способ самооптимизации данного варианта осуществления настоящего изобретения может дополнительно включать в себя завершение управляющим объектом самооптимизации. Например, в процессе выполнения самооптимизации управляющий объект может завершать самооптимизацию путем активации функции завершения самооптимизации в классе SOOptimizationIRP для завершения самооптимизации, такой как TerminateSOProcess().
Другой способ самооптимизации данного варианта осуществления настоящего изобретения может дополнительно включать в себя изменение управляющим объектом правила триггера самооптимизации. Например, в конкретном процессе реализации управляющий объект может изменять правило триггера самооптимизации, создаваемого на этапе 22, путем активации функции изменения правила триггера в классе SOOptimizationIRP для изменения правила триггера самооптимизации, такой как ChangeTriggerRule().
Данный способ самооптимизации данного варианта осуществления настоящего изобретения может дополнительно включать в себя удаление управляющим объектом правила триггера самооптимизации. Например, в конкретном процессе реализации управляющий объект может удалять правило триггера самооптимизации, создаваемого на этапе 22, путем активации функции удаления правила триггера в классе SOOptimizationIRP для удаления правила триггера самооптимизации, такой как DeleteTriggerRule().
В данном способе в соответствии с данным вариантом осуществления управляющий объект создает правило триггера самооптимизации, а управляемый объект выполняет самооптимизацию в соответствии с правилом триггера самооптимизации, создаваемым управляющим объектом, тем самым повышая гибкость в получении правила триггера самооптимизации. Более того, изменение и удаление правила, и завершение самооптимизации выполняются путем активации классов, чтобы пользователь мог контролировать процесс самооптимизации и управлять им с помощью управляющего объекта, тем самым значительно уменьшая сложность и время обработки процесса самооптимизации.
В одном варианте осуществления настоящего изобретения предлагается устройство управляемого объекта, например EMS или NE, которое содержит модуль выполнения самооптимизации. Данный модуль выполнения самооптимизации выполнен с возможностью выполнения самооптимизации в соответствии с правилом триггера самооптимизации, так что управляемый объект не обязательно должен принимать команду выполнения самооптимизации, что позволяет избежать выполнения самооптимизации в режиме, в котором пользователь отправляет соответствующую команду изменения конфигурации, таким образом, значительно уменьшая сложность процесса самооптимизации и время неавтоматической обработки самооптимизации. Кроме того, управляющее устройство может управлять самооптимизацией путем изменения правила триггера самооптимизации с тем, чтобы процесс самооптимизации проходил под управлением пользователя и в соответствии с его требованиями.
Система самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения может включать в себя управляемый объект. Данный управляемый объект может представлять собой устройство управляемого объекта в варианте осуществления устройства и выполнен с возможностью выполнения самооптимизации в соответствии с правилом триггера самооптимизации с тем, чтобы система самооптимизации могла выполнять самооптимизацию без необходимости приема команды от пользователя, тем самым значительно уменьшая сложность процесса самооптимизации и время неавтоматической обработки самооптимизации. Кроме того, пользователь может управлять самооптимизацией путем изменения правила триггера самооптимизации с тем, чтобы процесс самооптимизации проходил под управлением пользователя и в соответствии с его требованиями.
Фиг.4 представляет собой принципиальную схему системы самооптимизации в соответствии с одним вариантом осуществления настоящего изобретения. Данная система содержит управляющий объект 41 и управляемый объект 42. Управляющий объект 41 создает правило триггера самооптимизации, а управляемый объект 42 выполняет самооптимизацию в соответствии с правилом триггера самооптимизации, создаваемым управляющим объектом 41, тем самым повышая гибкость в получении правила триггера самооптимизации. Управляющий объект 41 может представлять собой NMS, а управляемый объект 42 может представлять собой EMS или NE. Управляющий объект 41 может также удалять или изменять правило триггера самооптимизации.
В рассматриваемых способе, устройстве и системе в соответствии с данными вариантами осуществления управляемый объект выполняет самооптимизацию в соответствии с правилом триггера самооптимизации, так что управляемый объект не обязательно должен принимать команду для выполнения самооптимизации, что позволяет избежать выполнения самооптимизации в режиме, в котором пользователь отправляет соответствующую команду изменения конфигурации, таким образом значительно уменьшая сложность процесса самооптимизации и время неавтоматической обработки самооптимизации. Кроме того, пользователь может управлять самооптимизацией путем изменения правила триггера самооптимизации с тем, чтобы процесс самооптимизации проходил под управлением пользователя и в соответствии с его требованиями.
Замысел настоящего изобретения также применим к управлению функцией самовосстановления управляемого объекта, реализуемой управляющим объектом. Для функции управления функцией самовосстановления требуется управляемый объект с целью обеспечения возможности поддержки информации оповещения. Для информации оповещения устанавливаются соответствующие правила триггера.
Специалисты в данной области техники должны понимать, что все этапы или часть этапов способа в соответствии с данными вариантами осуществления настоящего изобретения могут быть реализованы с помощью программы, управляющей соответствующим оборудованием. Программа может храниться на машиночитаемом носителе информации. При запуске данной программы выполняются этапы способа в соответствии с вариантами осуществления настоящего изобретения. Указанным носителем информации может быть любая среда, способная хранить программные коды, такая как постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), магнитный диск и оптический диск.
Наконец, необходимо отметить, что рассмотренные выше варианты осуществления изложены лишь для описания технических решений настоящего изобретения, но не ограничивают настоящее изобретение. Специалистам следует понимать, что, хотя настоящее изобретение подробно описано со ссылкой на вышеупомянутые варианты осуществления, в технических решениях, описанных в вышеупомянутых вариантах осуществления, могут быть выполнены модификации, либо некоторые технические признаки в технических решениях могут быть заменены эквивалентами при условии, что такие модификации или замены не приводят к выходу сущности соответствующих технических решений за пределы объема технических решений вариантов осуществления настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ СОПРЯЖЕНИЯ ПРИКЛАДНЫХ ПРОГРАММ С ПЛАТФОРМОЙ ХРАНЕНИЯ НА ОСНОВЕ СТАТЕЙ | 2003 |
|
RU2412461C2 |
| СИСТЕМЫ И СПОСОБЫ МОДЕЛИРОВАНИЯ ДАННЫХ В ОСНОВАННОЙ НА ПРЕДМЕТАХ ПЛАТФОРМЕ ХРАНЕНИЯ | 2003 |
|
RU2371757C2 |
| ЦИФРОВОЙ ФОТОАППАРАТ, СПОСОБ УПРАВЛЕНИЯ ИМ И СИСТЕМА ПЕЧАТИ | 2003 |
|
RU2292661C2 |
| СПОСОБ И СИСТЕМА ОБРАБОТКИ ДАННЫХ МЕДИКО-САНИТАРНОЙ ПОМОЩИ | 2009 |
|
RU2530303C2 |
| Способы и устройства для определения эквивалентной соты в сети связи | 2016 |
|
RU2695796C1 |
| УСТРОЙСТВО И СООТВЕТСТВУЮЩИЙ СПОСОБ ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ ЛОГИЧЕСКОГО ДЕРЕВА ПОДВИЖНОГО УЗЛА | 2002 |
|
RU2269210C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ БЕСПРОВОДНОЙ СВЯЗИ И СООТВЕТСТВУЮЩИЙ АППАРАТ | 2014 |
|
RU2669679C1 |
| НОСИТЕЛЬ ЗАПИСИ ИНФОРМАЦИИ И УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ ДЛЯ ВОСПРОИЗВЕДЕНИЯ 3D ИЗОБРАЖЕНИЙ | 2010 |
|
RU2520325C2 |
| КОНФИГУРИРОВАНИЕ ИНФОРМАЦИИ О КАЧЕСТВЕ ОБСЛУЖИВАНИЯ | 2008 |
|
RU2454012C2 |
| СПОСОБ ПОИСКА УСЛУГИ ИЛИ ОБЪЯВЛЕНИЯ ЕЕ В СИСТЕМЕ ПРЯМОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ НЕГО | 2013 |
|
RU2648580C2 |

Изобретение относится к области технологий сетей связи. Техническим результатом является обеспечение поддержки управления оперативными функциями самооптимизации. Раскрыты устройство управляемого объекта, способ и система самооптимизации. Способ содержит этап, на котором выполняют посредством управляемого объекта самооптимизацию в соответствии с правилом триггера самооптимизации. Правило триггера самооптимизации создается управляющим объектом в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом. Данное техническое решение позволяет избежать выполнения самооптимизации в режиме, в котором пользователь отправляет соответствующую команду изменения конфигурации, таким образом значительно уменьшая сложность процесса самооптимизации и время неавтоматической обработки самооптимизации. 2 н. и 12 з.п. ф-лы, 7 ил., 4 табл.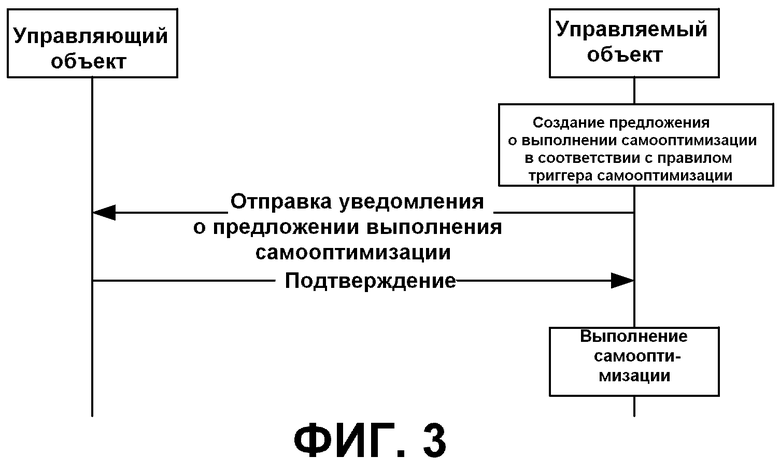
1. Способ самооптимизации, содержащий этапы, на которых выполняют посредством управляемого объекта самооптимизацию в соответствии с правилом триггера самооптимизации, причем правило триггера самооптимизации создается управляющим объектом в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом, причём правило триггера самооптимизации содержит тип самооптимизации или задачу самооптимизации.
2. Способ самооптимизации по п.1, в котором возможность самооптимизации, поддерживаемая управляемым объектом, включает в себя тип самооптимизации, поддерживаемое состояние триггера самооптимизации, поддерживаемую задачу самоптимизации и поддерживаемый цикл отслеживания самооптимизации.
3. Способ самооптимизации по п.2, дополнительно содержащий этап, на котором получают посредством управляющего объекта возможность самооптимизации управляемого объекта.
4. Способ самооптимизации по п.3, в котором этап получения управляющим объектом возможности самооптимизации управляемого объекта дополнительно содержит этап, на котором запрашивают посредством управляющего объекта информацию о возможности, поддерживаемой управляемым объектом в соответствии с информацией об управляемом объекте.
5. Способ самооптимизации по п.2, в котором этап создания управляющим объектом правила триггера самооптимизации в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом, содержит этапы, на которых создают посредством управляющего объекта правило триггера самооптимизации путем использования любого одного или любого сочетания из информации идентификатора о правиле триггера, информации об управляемом объекте, типа самооптимизации, цикла отслеживания самооптимизации, задачи самооптимизации, состояния триггера самооптимизации, и получают результат создания правила триггера.
6. Способ самооптимизации по п.5, в котором результат создания правила триггера содержит успех, неудачу и информацию, указывающую на то, что созданное правило пересекается с существующим правилом.
7. Способ самооптимизации по п.2, в котором поддерживаемая задача самооптимизации содержит одну задачу самооптимизации либо содержит множество задач самооптимизации и отношений множества задач самооптимизации.
8. Способ самооптимизации по п.7, в котором отношения множества задач самооптимизации содержат отношения, определяемые приоритетами, отношения, определяемые весами, отношения, определяемые арифметическими операциями, и отношения, определяемые логическими операциями.
9. Способ самооптимизации по п.1, дополнительно содержащий этап, на котором запрашивают посредством управляющего объекта существующее в настоящий момент правило триггера самооптимизации управляемого объекта.
10. Способ самооптимизации по п.9, в котором этап запроса управляющим объектом существующего в настоящий момент правила самооптимизации управляемого объекта содержит этап, на котором запрашивают посредством управляющего объекта список правил триггера самооптимизации в соответствии с информацией идентификатора о правиле триггера и/или информации об управляемом объекте.
11. Система самооптимизации, содержащая управляемый объект, выполненный с возможностью выполнения самооптимизации в соответствии с правилом триггера самооптимизации, причем правило триггера самооптимизации создается управляющим объектом в соответствии с возможностью самооптимизации, поддерживаемой управляемым объектом,
причем правило триггера самооптимизации содержит тип самооптимизации или задачу самооптимизации.
12. Система самооптимизации по п.11, в которой возможность самооптимизации содержит тип самооптимизации, поддерживаемое состояние триггера самооптимизации, поддерживаемую задачу самооптимизации и поддерживаемый цикл отслеживания самооптимизации.
13. Система самооптимизации по п.12, в которой управляющий объект дополнительно выполнен с возможностью запроса информации о возможности, поддерживаемой управляемым объектом, в соответствии с информацией об управляемом объекте.
14. Система самооптимизации по п.12, в которой управляющий объект дополнительно выполнен с возможностью создания правила триггера самооптимизации путем использования любого одного или любого сочетания из информации идентификатора о правиле триггера, информации об управляющем объекте, типа самооптимизации, цикла отслеживания самооптимизации, задачи самооптимизации и состояния триггера самооптимизации, а также получения результата создания правила триггера.
| WO 2007110348 A2, 04.10.2007 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| CN 1889749 A, 03.01.2007 | |||
| CN 101388707 A, 18.03.2009 | |||
| ОПТИМИЗАЦИЯ БЕСПРОВОДНОЙ СЕТИ ПРИ ПОМОЩИ ДАННЫХ УДАЛЕННЫХ УСТРОЙСТВ | 2003 |
|
RU2332812C2 |

