ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к анализу трубчатой структуры, в частности одного или более сосудов, обладающих трубчатой структурой, на медицинском изображении. Изобретение также относится к взаимодействию пользователя с инструментом для анализа сосудов.
УРОВЕНЬ ТЕХНИКИ
Наборы данных медицинских изображений включают медицинские изображения сосудистых структур. Эти медицинские изображения могут быть двухмерными (такими как в рентгеновском исследовании сосудов) или трехмерными (такими как в КТ-ангиографии или МР-ангиографии). Трехмерное изображение может представлять собой объемное изображение, что обозначает, что сосудистые структуры представлены в виде уровней яркости. Существуют инструменты отслеживания сосудов, которые могут идентифицировать части сосудистой структуры на основе уровней яркости.
Например, в US 2008/0101667 A1 раскрыто устройство для представления информации, связанной с кровеносным сосудом, пользователю для обследования кровеносного сосуда. Устройство содержит память, память способна хранить данные визуализации, установленные в трех измерениях, и процессор, оперативно связанные с памятью для получения данных визуализации. Процессор выполнен с возможностью представления двухмерного среза трехмерных данных визуализации кровеносного сосуда пользователю в первом пользовательском интерфейсе; получения от пользователя выбора кровеносного сосуда, где пользователь выбирает кровеносный сосуд посредством взаимодействия с первым пользовательским интерфейсом; идентификации пути кровеносного сосуда в связи с полученным выбором кровеносного сосуда по трехмерным данным визуализации; и представления интенсивности выбранного кровеносного сосуда вдоль идентифицированного пути кровеносного сосуда пользователю для анализа выбранного кровеносного сосуда.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Было бы полезно иметь усовершенствованную систему для выполнения анализа сосудов. Чтобы более эффективно решить эту проблему, в первом аспекте изобретения представлена система, которая содержит
средство отображения для отображения трехмерного изображения, представляющего по меньшей мере трубчатую структуру;
средство указания, чтобы предоставить пользователю возможность указывать положение на сосуде с трубчатой структурой для получения указанного положения; и
средство идентификации для идентификации участка трубчатой структуры, расположенного вокруг указанного положения, включая любые бифуркации, и расширения вплоть до заданного расстояния от указанного положения для получения идентифицированного участка.
Пользователю нужно только указать одну точку на сосудистой структуре. После этого система идентифицирует участок трубчатой структуры предсказуемым и согласованным способом. Поскольку идентифицированный участок содержит целую трубчатую структуру, включая любые бифуркации, отсутствуют сюрпризы, в отношении которых сосуд будет идентифицирован. Это повышает уверенность пользователя при указании положения. Также поскольку сосуд идентифицирован вплоть до заданного расстояния, отсутствует необходимость указывать какую-либо конечную точку сегмента сосуда, подлежащего анализу. Система предоставляет эффективный инструмент для выполнения анализа сосудов в участке сосудистой структуры.
Средство отображения можно скомпоновать для отображения графической аннотации в отображенном трехмерном изображении, показывающей идентифицированный участок трубчатой структуры. Это предоставляет пользователю обратную связь с идентифицированным участком, что позволяет пользователю подтверждать идентифицированный участок. Например, впоследствии пользователь может указать другую точку на сосудистой структуре, после чего средство идентификации может идентифицировать соответствующий участок трубчатой структуры. Воспроизводимый способ, которым идентифицируют участок трубчатой структуры, делает отображенную графическую аннотацию также воспроизводимой. Такую аннотацию также можно хранить в файле пациента.
Средство идентификации может содержать измерительное средство для измерения заданного расстояния вдоль трубчатой структуры. Это представляет собой подходящий способ измерения заданного расстояния с учетом формы сосудов. Идентифицированный участок может содержать сосуды от указанного положения вплоть до конечного положения на сосуде, длина сосуда от указанного положения до конечного положения по существу равна заданному расстоянию. Альтернативно можно использовать эвклидово расстояние.
Измерительное средство можно скомпоновать для измерения длины отслеживаемого сосуда от указанного положения вдоль трубчатой структуры. Эффективный способ надежного отслеживания сосуда заключается в сохранении постоянной длины отслеживаемого сосуда.
Измерительное средство может быть выполнено с возможностью установления числа бифуркаций, обнаруженных от указанного положения вдоль трубчатой структуры. В этом заключается другой способ обеспечения надежности отслеживания сосуда.
Средство переформатирования может быть выполнено с возможностью обеспечения многократного криволинейного переформатирования после изгиба по меньшей мере части сосуда от указанного положения вплоть до бифуркации трубчатой структуры и за ней, а также после изгиба по меньшей мере части двух сосудов за бифуркацией. Этот режим визуализации обеспечивает эффективное представление бифуркации.
Средство указания можно скомпоновать так, чтобы оно реагировало на событие перемещения мыши. Событие перемещения мыши позволяет очень эффективно идентифицировать некоторые участки сосудистой структуры посредством перемещения курсора мыши поверх положений сосуда, представляющих интерес. Каждый раз, когда определяют событие перемещения мыши, можно активировать средство идентификации и/или средство отображения, чтобы предоставить обновленный идентифицированный участок.
Система может содержать средство оценки для оценки локального параметра отслеживания из объемного изображения в указанном положении после того, как пользователь указал положение. Это позволяет инициализировать алгоритм отслеживания сосуда с использованием локального параметра отслеживания. Этот этап инициализации позволяет использовать инструмент отслеживания сосуда на широком спектре сосудов.
Средство оценки можно скомпоновать для вычисления взвешенного среднего значения элемента тензора структуры, взвешенное среднее значение вычисляют по всей области заданного размера вокруг указанного положения. Такое взвешенное среднее значение элемента тензора структуры можно использовать в качестве элемента усредненного тензора структуры. Усредненный тензор структуры можно использовать для установления ориентации сосуда в указанном положении.
Рабочая станция медицинской визуализации может содержать предложенную систему.
Способ выполнения анализа сосудов может содержать:
отображение трехмерного изображения, представляющего по меньшей мере трубчатую структуру;
предоставление пользователю возможности указать положение на сосуде с трубчатой структурой для получения указанного положения; и
идентификацию участка трубчатой структуры, расположенного вокруг указанного положения, включая любые бифуркации, и расширение вплоть до заданного расстояния, измеряемого от указанного положения, для получения идентифицированного участка.
Компьютерный программный продукт может содержать инструкции для управления процессорной системой для выполнения предложенного способа.
Специалисты в данной области примут во внимание то, что два или более вышеуказанных варианта осуществления, реализации и/или аспекта по изобретению можно объединить любым предположительно эффективным образом.
На основе настоящего описания профессионал в данной области может осуществить модификации и варианты устройства получения изображений, рабочей станции, системы и/или компьютерного программного продукта, которые соответствуют описанным модификациям и вариантам системы.
Профессионал в данной области примет во внимание, что способ можно применять к многомерным данным изображения, например к двухмерным, трехмерным или четырехмерным изображениям, полученным посредством различных модальностей получения, таких как, но без ограничения, стандартная рентгеновская визуализация, компьютерная томография (КТ), магнитно-резонансная томография (ЯМР), ультразвук (УЗ), позитронно-эмиссионная томография (ПЭТ), однофотонная эмиссионная компьютерная томография (ОФЭКТ) и медицинская радиология (МР).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты по изобретению дополнительно объяснены и описаны со ссылкой на чертеж, на котором
на фиг.1 представлена блок-схема системы для выполнения анализа сосудов; на фиг.2 представлена блок-схема способа выполнения анализа сосудов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В некоторых сосудистых применениях одна из задач состоит в визуализации сосудов посредством использования криволинейных плоских или выпрямленных переформатированных видов. Также в данных изображениях в нескольких местонахождениях можно измерить локальные параметры сосудов, такие как площадь и радиус, например, для количественной оценки степени стеноза или размера аневризмы. Эти способы визуализации могут использовать путь через центр сосуда. Автоматические инструменты отслеживания пути часто ограничены только несколькими сосудами. Полуавтоматические инструменты отслеживания пути могут требовать ввода от пользователя, чтобы указать отслеживание по одной точке или по двум точкам на сосуде. Когда используют только одну входную точку, пользователь не может контролировать длину отслеживаемого пути или отслеживаемый сосуд. Инструменты, которые используют начальную точку и конечную точку, заданные пользователем, обладают недостатком, который заключается в необходимости дополнительного пользовательского ввода. Также, если пользователь помещает точки слишком далеко друг от друга или в различные сосуды, или результирующий путь будет неправильным, или время вычисления слишком длинным. Некоторым инструментам отслеживания сосудов нужно сначала сегментировать структуру сосуда перед отслеживанием осевой линии, проходящей через него. Это может оказаться эффективным.
Взаимодействие можно усовершенствовать, используя инструмент отслеживания, предлагающий другую возможность взаимодействия. Используя произвольную визуализацию, пользователь может указать любое местонахождение на сосудистой структуре (например, перемещая курсор мыши по изображению), а алгоритм может отслеживать локальное дерево автоматически и интерактивно. Это отслеживание можно выполнять вплоть до максимальной длины сосуда. Способы взаимодействия, описанные в настоящем документе, дают возможность заново определить парадигму обследования сосудов. Алгоритм может обеспечить пользователю предварительный просмотр того эффекта, который будет вызван выбором определенного сосуда наподобие «Что будет, если я нажму сюда?». Способы взаимодействия, описанные в настоящем документе, можно напрямую связать с широким спектром способов визуализации и количественного определения.
Обеспечив быстроту операций отслеживания участка сосуда и визуализации участка отслеживаемого сосуда, можно усовершенствовать интерактивность. Когда отслеживают только ограниченный участок сосудистого дерева, отслеживание происходит быстрее. На основе пути или дерева визуализацию и измерения можно выполнять в любом месте только при ограниченном взаимодействии. За счет обеспечения обратной связи визуализации отображается непосредственная реакция на действие пользователя, что делает инструмент более легким для понимания и изучения. Поведение инструмента может быть более предсказуемым для пользователя, поскольку длина отслеживаемого участка сосуда может не зависеть от местоположения мыши. Когда мышь перемещают вдоль сосуда, это дает предсказуемый и понятный результат. Способы, описанные в настоящем документе, можно применять, например, в применениях для мультимодального трехмерного анализа сосудов. Эти инструменты предлагают усовершенствованное отображение, сегментацию, обследование и количественную оценку сосудов.
Термин трехмерная количественная оценка сосудов может относиться к группе применений, нацеленных на различные сосудистые структуры, с использованием различных способов получения, но для которых требования к необходимым измерениям могут быть схожими. Анатомическими примерами являются аорта, сонные артерии, коронарные артерии, периферические артерии нижних конечностей и коронарные артерии. МРТ, КТ и рентгенография вращения представляют собой примеры модальностей, которые используют для получения данных изображения вышеуказанных анатомических структур. Примером обследования сосуда является поиск расширенных или суженных частей сосуда. Более конкретный пример заключается в поиске легочной эмболии в легочных артериях. Сосудистые применения могут визуализировать сосуды, используя усовершенствованные способы визуализации для целей обследования, такие как криволинейное МПП. Эти измерения также могут измерять локальные параметры сосудов, такие как площадь и радиус сосуда в нескольких местоположениях в данных изображения для количественного определения степени стеноза или размера аневризмы. Эти измерения можно выполнять на поперечном сечении, проходящем через сосуд, представляющий интерес, которое можно генерировать автоматически или посредством перемещения вдоль осевой линии сосуда.
Другие применения могут фокусироваться на планировании хирургического вмешательства в сосуды, таком как планирование стентирования.
На фиг.1 представлена блок-схема системы для выполнения анализа сосудов. Система может состоять из нескольких блоков. Каждый блок можно частично или полностью реализовать в программном обеспечении. Дополнительно система может содержать (не показано): процессор, запоминающее средство, дисплей, средство пользовательского ввода, такое как клавиатура и/или мышь, порт связи. Процессор можно скомпоновать для исполнения инструкций, которые являются частью инструмента для анализа сосудов. Запоминающее средство может содержать ОЗУ, ПЗУ, жесткий диск, съемный носитель, такой как CD и DVD. Запоминающее средство можно использовать для хранения машинных инструкций и/или для хранения данных медицинского изображения. Средство ввода можно использовать для предоставления пользователю возможности указывать положение в трубчатой структуре. Кроме того, средство ввода можно использовать для предоставления пользователю возможности управлять системой. Порт связи можно использовать для установления связи с другой компьютерной системой, например с сервером. Порт связи можно скомпоновать для соединения с сетью, такой как локальной сетью, глобальной сетью и/или интернетом. Через сеть можно осуществлять доступ к другой компьютерной системе, например, для получения данных изображения и для передачи отчетов об анализе сосудов.
Средство 1 отображения можно предоставить для отображения трехмерного изображения, представляющего по меньшей мере трубчатую структуру. Это трехмерное изображение получено через порт связи и его можно сохранить на запоминающем средстве. Для отображения изображения можно использовать различные виды визуализации. Например, можно отображать вид непосредственной визуализации объемов, проекции максимальной интенсивности или срез. Различные виды визуализации можно использовать последовательно или одновременно. Система может позволять увеличивать, панорамировать и/или вращать изображение для того, чтобы получить правильный вид изображения. Изображение может представлять трубчатую структуру, например изображение содержит элементы объема (воксели), показывающие уровни яркости в конкретных координатных местоположениях объема. Структуры сосудов можно распознавать по их конкретной форме и в некоторых случаях по их уровням яркости. Трехмерное изображение также может представлять сосудистую структуру, например, в виде модели поверхности.
Средство 2 указания можно предоставить для предоставления пользователю возможности указывать положение на сосуде с трубчатой структурой для получения указанного положения. Такое средство указания можно реализовать, предоставив пользователю возможность помещать курсор мыши на положение в отображенном изображении. На основе положения курсора мыши положение на сосуде можно вычислить способом, который сам по себе известен в данной области.
Средство 3 идентификации можно предоставить для идентификации участка трубчатой структуры, расположенного вокруг указанного положения, включая любые бифуркации, и проходящего вплоть до заданного расстояния, измеряемого от указанного положения, для получения идентифицированного участка. Средство 3 идентификации можно скомпоновать так, чтобы оно срабатывало, например, в ответ на событие перемещения мыши.
Средство 1 отображения можно скомпоновать для отображения графической аннотации в отображенном трехмерном изображении, показывающей идентифицированный участок трубчатой структуры. Например, осевую линию сосуда окрашивают в различимый цвет.
Средство 3 идентификации может содержать измерительное средство 4 для измерения заданного расстояния, измеряемого вдоль трубчатой структуры. Например, алгоритм волнового фронта применяют к отслеживанию сосуда, причем каждая новая волна добавляет заданное значение к измеренному расстоянию. Средство 3 идентификации идентифицирует трубчатую структуру вплоть до заданного расстояния. Альтернативой является измерение эвклидова расстояния. Измерительное средство 4 можно скомпоновать для измерения длины отслеживаемого сосуда от указанного положения вдоль трубчатой структуры. Например, алгоритм волнового фронта применяют для отслеживания сосуда, причем каждая новая волна добавляет заданное значение к измеренному расстоянию. Средство 3 идентификации идентифицирует трубчатую структуру вплоть до заданного расстояния. Альтернативно, измерительное средство 4 можно скомпоновать для установления числа бифуркаций, встреченных от указанного положения вдоль трубчатой структуры. Например, сосуды идентифицируют от указанного положения вплоть до второй бифуркации.
Средство 5 переформатирования может обеспечивать многократное криволинейное переформатирование (многократное криволинейное МПП). Изгиб переформатирования соответствует изгибу по меньшей мере части сосуда от указанного положения вплоть до и за бифуркацией трубчатой структуры и повторяет изгиб по меньшей мере части двух сосудов за бифуркацией. Переформатирование можно отобразить на дисплее 1.
Средство 2 указания можно скомпоновать так, чтобы оно реагировало на событие перемещения мыши. Это удобно, в частности, когда отслеживание сосуда выполняют достаточно быстро. Сосуды можно обследовать, не выполняя щелчок мышью в определенных положениях в явной форме. В дополнение к вышеуказанной восприимчивости системы к событию перемещения мыши идентификация и аннотация структуры сосуда вплоть до заданного расстояния от указанного положения дополнительно повышают практичность системы.
Трехмерное изображение может содержать объемное изображение, средство 3 идентификации дополнительно содержит средство 6 оценки для оценки локального параметра отслеживания по объемному изображению в указанном положении в ответ на указание положения пользователем. Посредством оценки локального параметра отслеживания непосредственно по объемному изображению (т.е. по уровням яркости вокселей) в ответ на указание положения пользователем, его можно адаптировать к различным сосудистым областям, что делает возможным использование системы без предварительного выбора конкретного вида сосуда.
Средство 6 оценки можно скомпоновать для вычисления взвешенного среднего значения элемента тензора структуры, взвешенное среднее значение вычисляют по всей области заданного размера вокруг указанного положения. Это является основным эффективным способом инициализации алгоритма отслеживания, который можно применять к широкому спектру сосудистых структур. Этот тензор можно вычислить быстро. Нет необходимости отслеживать сосудистую структуру заблаговременно, это можно выполнить после указания положения пользователем.
Систему на фиг.1 можно встроить в рабочую станцию медицинской визуализации или в консоль устройства медицинской визуализации. Профессионал в данной области поймет, что рабочая станция медицинской визуализации и консоль содержат по меньшей мере один блок обработки и память. Дополнительно она может содержать множество других блоков, например жесткие диски, ОЗУ, кэш, дисплеи, шины инструкций и данных, дисплеи и клавиатуры.
На фиг.2 показан способ выполнения анализа сосудов. Способ включает в себя, на этапе 101, отображение трехмерного изображения, представляющего по меньшей мере трубчатую структуру. На этапе 102 пользователю предоставляют возможность указать положение на сосуде с трубчатой структурой для получения указанного положения. На этапе 103 идентифицируют участок трубчатой структуры вокруг указанного положения. Участок может содержать любые бифуркации и может проходить вплоть до заданного расстояния, измеряемого от указанного положения, для получения идентифицированного участка.
Для обследования сосуда пользователь может визуализировать данные, используя способы визуализации, зависящие от геометрии пути, такие как многоплоскостное переформатирование (МПП), проекция максимальной интенсивности (ПМИ) или визуализация объемов (ВО). Для способов визуализации на основе пути необходим путь, проходящий через центр сосуда.
Можно предусмотреть алгоритм для отслеживания дерева. В настоящем документе слово «дерево» относится по меньшей мере к части сосудистой структуры, включая бифуркации и боковые ответвления. Такой алгоритм может найти локальную древовидную топологию, начиная от произвольного трехмерного положения в данных (например, от выбранного пользователем положения). В древовидной топологии можно закодировать координаты каждого сосуда, взаимосвязь между сосудами и положением каждой бифуркации. Выделение дерева может быть ограничено максимальной длиной отслеживания сосуда. Эту длину можно измерять вдоль отслеживаемых сосудов, а не вдоль прямой линии.
Местоположение мыши на произвольной визуализации трехмерного медицинского изображения можно перевести в данные о положении {x, y, z}. Например, можно использовать положение {x, y, z}, соответствующее сосуду, который виден под курсором мыши. Используя алгоритм центрирования, можно вычислить точку локального центра сосуда и можно отслеживать дерево от этого положения, используя критерий максимальной длины сосуда. Используя отслеживаемое дерево, можно создать визуализацию на основе дерева или пути и вычислить измерения. Если пользователь удовлетворен результатом, он может «закрепить»/финализировать результат отслеживания. Например, результат отслеживания можно финализировать одним щелчком мыши. После этого пользователь может решить редактировать результат отслеживания. Когда пользователь удовлетворен, полученные изображения и соответствующие результаты измерений можно переслать в инструмент отчетности.
В примере воплощения функциональность «исследование дерева» можно активировать кнопкой на панели задач. После активации «исследования дерева», при перемещении курсора мыши по изображению автоматически отслеживается дерево вплоть до заданного расстояния. Ортовид выравнивают относительно местоположения мыши на основе локального направления дерева. На изображении можно пометить бифуркации, например, используя другой цвет. Вместо ортовида также можно создать и отобразить криволинейные плоские переформатированные изображения (в местоположении продольных видов). Кроме того, вид многоплоскостного переформатирования (МПП) можно выровнять относительно ближайшей бифуркации с учетом сегментов дерева сосудов, отходящих от бифуркации.
Можно предусмотреть способ отслеживания локальной древовидной топологии по определяемому пользователем местоположению мыши и на заданную максимальную длину сосуда, где известно точное положение каждой бифуркации и сосуда, при полной интерактивности и максимальной воспроизводимости в произвольной визуализации трехмерных данных медицинского изображения, не требуя каких-либо щелчков мышью. Древовидную топологию можно использовать для интерактивного представления визуализации, которое основано на древовидной топологии, такой как криволинейное МПП, многократное криволинейное МПП, выпрямленное переформатирование, ортовид, подсвеченная визуализация объемов и т.д. Можно использовать способ определения краев сосуда вдоль локальной древовидной топологии для вычисления параметров количественной оценки, таких как площадь, диаметр и радиус, и для визуализации этих параметров на всех доступных видах. Автоматическое измерение местоположений можно предложить для количественной оценки и других заболеваний на основе автоматически полученных параметров. Информацию, такую как изображения и измерения, можно переслать в инструмент отчетности лишь одним щелчком мыши.
Системы отслеживания сосудов можно инициализировать посредством выбора заранее установленных значений, специфичных для конкретного применения. Например, предварительные установки специфичны для сосудистой области (например, «периферические сосуды» или «коронарные артерии») и/или модальности визуализации (например, КТ).
Однако также можно добавить алгоритм оценки локального параметра (предпочтительно в реальном времени), который инициализирует параметры отслеживания (и при необходимости обновляет параметры в процессе отслеживания). Это позволяет проводить обследование без предположений относительно конкретных размеров сосудов. Это позволяет инструменту отслеживания отслеживать сосуды, обладающие широким диапазоном диаметров. Также инициализация параметров отслеживания позволяет проводить обследование на МР-томограммах, где значения интенсивности сосудов не известны заблаговременно (и может существовать много артефактов негомогенности). При заданном объеме трехмерных исходных данных сосудистой структуры пользователь может выбрать визуализацию, такую как ПМИ (проекция максимальной интенсивности), МПП (многоплоскостное переформатирование) или визуализация объемов. Чтобы указать положение на структуре сосуда, пользователь может изучить визуализацию, перемещая мышь по изображению. Следующие этапы можно использовать для визуализации отслеживания сосуда в указанном положении: получение координат {x, y, z} указанных положений в трехмерном исходном объеме; вычисление локальной ориентации сосуда. Также можно вычислять контур сосуда с учетом локальной ориентации сосуда.
Локальную ориентацию сосуда можно найти, установив ориентацию структуры изображения; последнюю можно вычислить непосредственно по значениям яркости для локального изображения, используя тензор структуры. Тензор структуры можно задать выражением
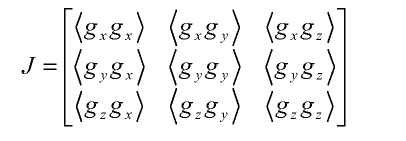
где g i представляет собой градиент изображения в направлении i. Скобки ‹› обозначают взвешенное среднее значение по всей области заданного размера.
Операцию взвешивания можно осуществлять, используя размывание по Гауссу. После вычисления тензора структуры можно вычислить характеристические значения {λ0, λ1, λ2} и характеристические векторы {ν0, ν1, ν2}. Характеристические значения можно сортировать, используя правило λ0≤λ1≤λ2. Следовательно, ν0 соответствует направлению, в котором взвешенное произведение градиента является минимальным. В трубчатой структуре это соответствует локальному направлению сосуда. ν1 и ν2 охватывают плоскость поперечного сечения, перпендикулярную сосуду.
Используя тензор структуры, можно установить локальное направление сосуда. Можно установить оценку поперечного сечения просвета сосуда, перпендикулярного этому направлению сосуда. Например, можно установить круглое поперечное сечение или можно выполнить более детализированное определение контура. Можно сравнивать интенсивности изображения внутри поперечного сечения сосуда и снаружи поперечного сечения сосуда. Такое сравнение можно использовать для инициализации или обновления параметров алгоритма отслеживания.
Следует принимать во внимание, что настоящее изобретение также распространяется на компьютерные программы, в частности на компьютерные программы на или в носителе, адаптированные для реализации изобретения на практике. Программа может быть в форме исходного кода, объектного кода, источника промежуточного кода и объектного кода, такого как частично компилированный код, или в любой другой форме, пригодной для использования в реализации способа по изобретению. Также следует понимать, что такая программа может иметь множество различных архитектурных решений. Например, программный код, реализующий функциональность способа или системы по изобретению, можно разделить на одну или несколько подпрограмм. Профессионалу известно множество способов распределения функциональности среди этих подпрограмм. Подпрограммы можно хранить вместе в одном исполняемом файле, чтобы сформировать независимую программу. Такой исполняемый файл может содержать исполняемые компьютером инструкции, например, инструкции процессора и/или инструкции интерпретатора (например, инструкции интерпретатора Java). Альтернативно, одна, или несколько, или все подпрограммы можно хранить по меньшей мере в одном внешнем файле библиотеки и компоновать с основной программой или статически, или динамически, например, во время работы. Основная программа содержит по меньшей мере один вызов по меньшей мере одной подпрограммы. Также подпрограммы могут содержать вызовы функций друг друга. Вариант осуществления, относящийся к компьютерному программному продукту, содержит исполняемые компьютером инструкции, соответствующие каждому этапу обработки по меньшей мере одного из предложенных способов. Эти инструкции можно разделить на подпрограммы и/или можно хранить в одном или нескольких файлах, которые можно компоновать статически или динамически. Другой вариант осуществления, относящийся к компьютерному программному продукту, содержит исполняемые компьютером инструкции, соответствующие каждому средству по меньшей мере одной из предложенных систем и/или продуктов. Эти инструкции можно разделить на подпрограммы и/или хранить в одном или нескольких файлах, которые можно компоновать статически или динамически.
Носитель компьютерной программы может представлять собой любой объект или устройство, на котором можно хранить программу. Например, носитель может содержать носитель данных, такой как ПЗУ, например, CD-ROM или полупроводниковое ПЗУ, или магнитный носитель данных, например гибкий диск или жесткий диск. Кроме того, носитель может представлять собой передаваемый носитель, такой как электрический или оптический сигнал, который можно передавать по электрическому или оптическому кабелю или посредством радио или другими средствами. Когда программу осуществляют в таком сигнале, такой кабель или другое устройство или средство может составлять носитель. Альтернативно, носитель может представлять собой интегральную схему, в которую встроена программа, интегральная схема адаптирована для выполнения или для использования при выполнении соответствующего способа.
Следует отметить, что вышеуказанные варианты осуществления иллюстрируют, а не ограничивают изобретение и что специалисты в данной области смогут разработать множество альтернативных вариантов осуществления, не выходящих за рамки объема прилагаемой формулы изобретения. В формуле изобретения любые условные обозначения, приведенные в скобках, не следует рассматривать в качестве ограничения пункта формулы изобретения. Использование глагола «содержать» и его спряжений не исключает присутствия элементов или этапов, отличных от тех, которые установлены в пункте формулы изобретения. Упоминание элемента в единственном числе не исключает присутствия нескольких таких элементов. Изобретение можно реализовать посредством аппаратного обеспечения, включая несколько отдельных элементов, и посредством подходящим образом запрограммированного компьютера. В пункте формулы изобретения, в котором перечислено несколько средств в составе устройства, несколько этих средств могут быть выполнены в виде одного или того же элемента аппаратного обеспечения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы, не указывает на то, что сочетание этих мер нельзя использовать с выгодой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛИЗАЦИЯ ПРЕДСТАВЛЯЮЩЕЙ ИНТЕРЕС ТКАНИ В ДАННЫХ КОНТРАСТИРОВАННОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2692038C2 |
| ОТОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ ВИДОВ СОСУДИСТОЙ СЕТИ ДЛЯ ОПТИМАЛЬНОГО ПЕРЕМЕЩЕНИЯ УСТРОЙСТВА | 2013 |
|
RU2627147C2 |
| СРЕДСТВО ВЫДЕЛЕНИЯ СЕГМЕНТАЦИИ | 2013 |
|
RU2638007C2 |
| ОТОБРАЖЕНИЕ АНАТОМИЧЕСКИХ ДРЕВОВИДНЫХ СТРУКТУР | 2007 |
|
RU2458402C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ И СПОСОБ ДЛЯ ПРОЦЕДУРЫ НАВЕДЕНИЯ ПО ИЗОБРАЖЕНИЮ | 2013 |
|
RU2654608C2 |
| ФОРМИРОВАНИЕ ДАННЫХ ОБЪЕКТА | 2010 |
|
RU2549141C2 |
| ВИЗУАЛИЗАЦИЯ СОСУДИСТОЙ СТРУКТУРЫ | 2007 |
|
RU2466679C2 |
| ОСЛАБЛЕНИЕ КОСТЕЙ ПРИ РЕНТГЕНОВСКОЙ ВИЗУАЛИЗАЦИИ | 2013 |
|
RU2662871C2 |
| НАВИГАЦИЯ ИНТЕРВЕНЦИОННОГО УСТРОЙСТВА | 2011 |
|
RU2569011C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ ТКАНИ ГРУДИ | 2017 |
|
RU2748435C2 |
Изобретение относится к анализу трубчатой структуры. Техническим результатом является обеспечение выполнения анализа сосудов. Система содержит средство (1) отображения для отображения трехмерного изображения, представляющего по меньшей мере трубчатую структуру; средство (2) указания для предоставления пользователю возможности указывать положение на сосуде с трубчатой структурой для получения указанного положения, причем средство (2) указания выполнено с возможностью реагировать на событие перемещения мыши; и средство (3) идентификации для идентификации участка трубчатой структуры, расположенного вокруг указанного положения, включая любые бифуркации, и продолжающегося вплоть до заданного расстояния, измеряемого от указанного положения, для получения идентифицированного участка, причем средство (1) отображения выполнено с возможностью отображения графической аннотации в отображаемом трехмерном изображении, показывающей идентифицированный участок трубчатой структуры, и причем средство идентификации и/или средство отображения выполнены с возможностью предоставления обновленного идентифицированного участка, когда определяют событие перемещения мыши. 4 н. и 6 з.п. ф-лы, 2 ил.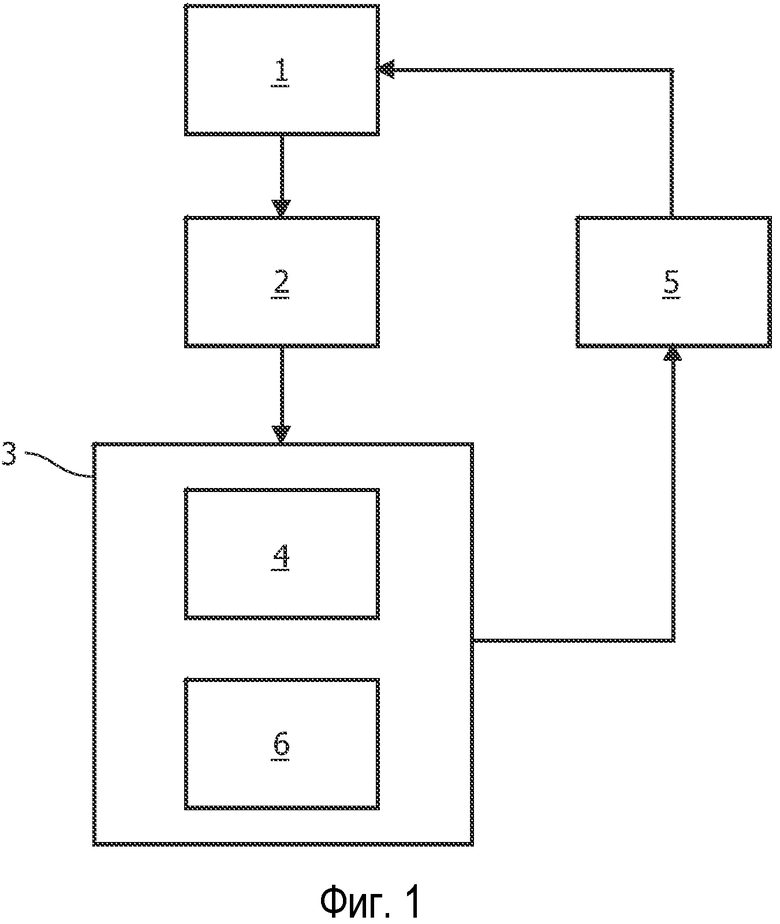
1. Система для выполнения анализа сосудов, которая содержит
средство (1) отображения для отображения трехмерного изображения, представляющего по меньшей мере трубчатую структуру;
средство (2) указания для предоставления пользователю возможности указывать положение на сосуде с трубчатой структурой для получения указанного положения, причем средство (2) указания выполнено с возможностью реагировать на событие перемещения мыши; и
средство (3) идентификации для идентификации участка трубчатой структуры, расположенного вокруг указанного положения, включая любые бифуркации, и продолжающегося вплоть до заданного расстояния, измеряемого от указанного положения, для получения идентифицированного участка,
причем средство (1) отображения выполнено с возможностью отображения графической аннотации в отображаемом трехмерном изображении, показывающей идентифицированный участок трубчатой структуры, и
причем средство идентификации и/или средство отображения выполнены с возможностью предоставления обновленного идентифицированного участка, когда определяют событие перемещения мыши.
2. Система по п.1, в которой средство (3) идентификации содержит измерительное средство (4) для измерения заданного расстояния, измеряемого вдоль трубчатой структуры.
3. Система по п.2, в которой измерительное средство (4) выполнено с возможностью измерения длины отслеживаемого сосуда от указанного положения вдоль трубчатой структуры.
4. Система по п.2, в которой измерительное средство (4) выполнено с возможностью установления числа бифуркаций, встреченных от указанного положения вдоль трубчатой структуры.
5. Система по п.1, которая дополнительно содержит средство (5) переформатирования для предоставления многократного криволинейного переформатирования, повторяющего изгиб по меньшей мере части сосуда от указанного положения вплоть до бифуркации трубчатой структуры и за ней и повторяющего изгиб по меньшей мере части двух сосудов за бифуркацией.
6. Система по п.1, в которой трехмерное изображение содержит объемное изображение, средство (3) идентификации дополнительно содержит средство (6) оценки для оценки локального параметра отслеживания по объемному изображению в указанном положении в ответ на указание положения пользователем.
7. Система по п.6, в которой средство (6) оценки выполнено с возможностью вычисления взвешенного среднего значения элемента тензора структуры, причем взвешенное среднее значение вычисляют по области с заданным размером вокруг указанного положения.
8. Рабочая станция медицинской визуализации, содержащая систему по п.1.
9. Способ выполнения анализа сосудов, содержащий этапы, на которых
отображают (101) трехмерное изображение, представляющее по меньшей мере трубчатую структуру;
предоставляют (102) пользователю возможность указывать положение на сосуде с трубчатой структурой для получения указанного положения в ответ на событие перемещения мыши; и
идентифицируют (103) участок трубчатой структуры, расположенный вокруг указанного положения, включая любые бифуркации, и продолжающийся вплоть до заданного расстояния, измеряемого от указанного положения, для получения идентифицированного участка;
отображают графическую аннотацию в отображенном трехмерном изображении, показывающую идентифицированный участок трубчатой структуры; и
предоставляют обновленный идентифицированный участок, когда определяют событие перемещения мыши.
10. Машиночитаемый носитель, содержащий инструкции, побуждающие процессорную систему выполнять способ по п.9.
| US20070160274 A1, 12.07.2007 | |||
| US20010044576 A1, 22.11.2001 | |||
| US20030031351 A1, 13.02.2003 | |||
| ПОВЫШЕНИЕ КАЧЕСТВА ИНТРАВАСКУЛЯРНОГО УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ И ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2238041C2 |

