ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к навигации интервенционного устройства. В частности, изобретение относится к системе навигации интервенционного устройства внутри трубчатой структуры объекта, к способу навигации интервенционного устройства внутри трубчатой структуры объекта, а также к компьютерному программному элементу и компьютерно-считываемому носителю информации.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Для применения интервенционных устройств в трубчатых структурах, в которых местоположение устройства не заметно пользователю извне объекта, пользователя снабжают информацией о местоположении устройства относительно объекта. Например, во время нейрологических интервенций, устройства регулярно применяют в процессе терапии больных сосудов. Для поддержки врача, например нейрохирурга, при навигации специального устройства к патологическому сегменту сосуда, устройство и область интереса визуализируют с использованием формирования рентгеновских изображений. Например, это решается с помощью изображений двумерных рентгеновских проекций, недостатком которых является потеря реальной трехмерности сосудов. Данный подход может приводить к визуализации с искажением, например, длины сегмента сосуда, углов разветвления сосудов и извилистости сосудов. Перечисленные последствия могут затруднять навигацию устройства по сосудам. Примером применения информации в целях навигации является функция, так называемого составления карты пути. Из имеющегося 3-мерного представления сосудов создают изображение проекции, которое согласуется с текущим углом наблюдения рентгеновской установки. Затем данное искусственное изображение проекции накладывают на динамические флюороскопические рентгеновские изображения, чтобы снабжать врача картой пути во время навигации устройства. Например, документ EP 0809211 A2 содержит описание формирования и записи в памяти последовательности 2-мерных рентгеновских изображений объекта для формирования 3-мерного изображения, выделения соответствующей структуры из 3-мерного изображения и вычисления последовательности синтезированных 2-мерных изображений проекций выделенной структуры, при этом структура проецируется с такими же геометрическими параметрами, которые используют для структуры во время формирования отдельных рентгеновских изображений. Затем синтезированные изображения проекций и обработанные рентгеновские изображения накладываются.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Однако проецированная карта пути остается 2-мерным «плоским» представлением сосудов, которое не обеспечивает информации о глубине. Кроме того, наложение контура сосудов, обычно, создает помехи в интервенционном изображении, которое следует сохранять как можно более чистым. Кроме того, существует постоянная потребность в обеспечении детализированной информации.
В соответствии с вышеизложенным может возникать потребность в обеспечении расширенной информации для пользователя, т.е. оператора, доступным образом.
В соответствии с примерным вариантом осуществления изобретения, обеспечиваются способ и система навигации интервенционного устройства внутри трубчатой структуры объекта, сформулированные в независимых пунктах формулы изобретения.
В соответствии с примерным вариантом осуществления изобретения, обеспечивается способ навигации интервенционного устройства внутри трубчатой структуры объекта, при этом способ содержит следующие этапы: a) захватывают данные 2-мерного флюороскопического рентгеновского изображения в одной геометрии проекций области интереса трубчатой структуры; b) обнаруживают интервенционное устройство на 2-мерном рентгеновском изображении; c) определяют 2-мерное положение интервенционного устройства на 2-мерном рентгеновском изображении; d) совмещают по меньшей мере одно 2-мерное рентгеновское изображение с ранее захваченным 3-мерным набором данных области интереса трубчатой структуры; e) преобразовывают определенное 2-мерное положение интервенционного устройства в положение в 3-мерном наборе данных; f) выделяют локальные 3-мерные параметры трубчатой структуры в положении интервенционного устройства; g) генерируют навигационную информацию для определенного 3-мерного положения интервенционного устройства и выделенных локальных 3-мерных параметров; и h) обеспечивают навигационную информацию пользователю.
Одно из преимуществ состоит в том, что, хотя для флюороскопического рентгеновского изображения обеспечивают только одну проекцию, при этом упомянутая одна проекция сама по себе не обеспечивает никакой информации о глубине, тем не менее, посредством преобразования определенного двумерного положения в положение в 3-мерном наборе данных можно извлекать необходимую трехмерную информацию в качестве основы для навигационной информации, обеспечиваемой пользователю. Таким образом, навигационная информация может помогать пользователю, например врачу, управлять, например, навигацией. При выделении локальных трехмерных параметров интервенционное устройство служит указателем в 3-мерном наборе данных или 3-мерном объеме. Так как двумерную информацию получают с помощью двумерных флюороскопических рентгеновских изображений, то упомянутые изображения можно получать непрерывно, чтобы непрерывно отслеживать 2-мерное положение устройства и взаимосвязанное трехмерное положение в процессе навигации, с обеспечением возможности сообщения трехмерной информации врачу или пользователю в реальном времени.
Например, нейрохирург выполняет рентгеновскую ангиографию пациентов для исследования и диагностики неврологических заболеваний, например, в области головы пациента. Например, нейрохирург выполняет диагностическое ротационное ангиографическое сканирование. Из двумерных изображений проекций, полученных посредством данного сканирования, создают трехмерное представление нервно-сосудистого пучка, при этом упомянутые сосуды проявляют высокую степень извилистости. Упомянутое трехмерное представление можно использовать, например, для поддержки диагностики на основе двумерных ангиограмм. Трехмерное представление можно также получать с помощью разных систем, например КТ (компьютерного томографического) сканера. Когда необходимо лечение пациента, выполняют навигацию устройства к патологическому сегменту сосуда. Проводку устройства осуществляют под контролем на основе рентгенфлюороскопии. Чтобы воспользоваться уже имеющейся трехмерной информацией о сосудах, трехмерный объем требуется совмещать с флюороскопическими изображениями устройства и сосудов, например, нервно-сосудистого пучка. Совмещение можно выполнять, например, с использованием информации о геометрии рентгеновских систем и флюороскопических изображений нервно-сосудистого пучка контрастированных контрастным веществом. Трехмерный объем может потребоваться, но может и не потребоваться сегментировать, например, совмещение можно выполнять согласованием информации о краях на двумерных флюороскопических изображениях и в трехмерном объеме. В процессе навигации устройства, устройство обнаруживают и отслеживают на флюороскопических изображениях таким образом, чтобы постоянно было известно положение устройства на флюороскопических изображениях. Затем, данное положение непрерывно преобразовывают в уникальное положение в совмещенном трехмерном представлении сосуда. Затем трехмерную информацию о сегменте сосуда, окружающем местоположение устройства, можно представлять, например отображать на экране, нейрохирургу для поддержки навигации устройства.
Изобретение можно применять при вмешательствах на нервно-сосудистых пучках под рентгеновским контролем, как пояснялось выше. Однако изобретение можно также применять во время любого вмешательства под рентгеновским контролем, при котором применяют по меньшей мере в известной степени рентгено-контрастные устройства, и в наличии имеется трехмерная информация об области интереса.
Поскольку двумерные флюороскопические рентгеновские изображения получают только в одной геометрии проекций, то навигационная информация основана на компьютерном определении точки в трехмерном наборе данных, для которой максимально правдоподобно допущение, что точка устройства расположена внутри сегмента трубчатой структуры.
В соответствии с примерным вариантом осуществления изобретения обеспечивается система навигации интервенционного устройства внутри трубчатой структуры объекта, при этом упомянутая система содержит: устройство получения рентгеновских изображений; блок обработки; интерфейс. Устройство получения рентгеновских изображений выполнено с возможностью захвата данных 2-мерных флюороскопических рентгеновских изображений в одной геометрии проекций области интереса трубчатой структуры. Блок обработки приспособлен обнаруживать интервенционное устройство на 2-мерном рентгеновском изображении и определять 2-мерное положение интервенционного устройства на 2-мерном рентгеновском изображении. Блок обработки дополнительно приспособлен совмещать по меньшей мере одно 2-мерное рентгеновское изображение с ранее захваченным 3-мерным набором данных области интереса трубчатой структуры и преобразовывать определенное 2-мерное положение интервенционного устройства в положение в 3-мерном наборе данных. Блок обработки также приспособлен выделять локальные 3-мерные параметры трубчатой структуры в положении интервенционного устройства и генерировать навигационную информацию для определенного 3-мерного положения интервенционного устройства и выделенных локальных 3-мерных параметров. Интерфейс приспособлен обеспечивать навигационную информацию для пользователя.
В соответствии с примерным вариантом осуществления изобретения, навигация интервенционного устройства составляет руководство для пользователя, например врача, в том числе хирурга или кардиолога-интервенциониста, выполняющего медицинскую процедуру.
В соответствии с примерным вариантом осуществления изобретения, данные 2-мерных флюороскопических рентгеновских изображений содержат последовательность из двух изображений с одной и той же геометрией проекций. 3-мерное положение преобразовывается посредством выделения определенной точки интервенционного устройства на двух 2-мерных изображениях.
В соответствии с примерным вариантом осуществления изобретения, точка на устройстве соответствует одной линии в 3-мерном пространстве, и одна и та же физическая точка на устройстве сопровождается на нескольких кадрах с созданием тем самым нескольких зависящих от времени 3-мерных линий.
В соответствии с примерным вариантом осуществления изобретения, несколько физических точек на одном и том же устройстве и в данный момент времени используют для создания пространственно-зависимых 3-мерных линий.
В соответствии с примерным вариантом осуществления изобретения, обеспечивается сочетание обоих способов, т.е. несколько физических точек на устройстве отслеживают во времени.
В соответствии с примерным вариантом осуществления изобретения, для данной точки, наблюдаемой на проекции, существует набор возможных 3-мерных точек, которые создали 2-мерную точку проекции, т.е. для данной геометрии. Упомянутый набор является 3-мерной линией. Все точки на данной линии участвуют в создании проекции, но в случае когда только некоторые из них действительно поглощают излучение, то, в соответствии с настоящим изобретением, упомянутые сильно поглощающие точки называют 3-мерными образующими точками 2-мерной точки проекции.
Например, предполагается, что линия в пространстве может пересекать несколько сегментов трубчатой структуры, например, в нескольких сосудах. Получают большее число точек, например точек, различающихся по времени и в пространстве. При этом неоднозначность исключают определением сегмента или сосуда, который, с максимальной вероятностью, должен вмещать устройство.
В соответствии с примерным вариантом осуществления изобретения, одна геометрия проекций представляет собой захват данных методом рентгенфлюороскопии в одной плоскости.
В соответствии с примерным вариантом осуществления изобретения, устройство лежит внутри некоторого сегмента трубчатой структуры на протяжении всей навигационной процедуры. В соответствии с примерным вариантом осуществления изобретения, устройство может лежать только внутри пары возможных трубчатых сегментов. Кроме того, вероятность максимизируют числом пересечений определенных линий устройства и трубчатых сегментов, при этом пересечения соответствуют точкам.
В соответствии с примерным вариантом осуществления изобретения, устройство имеет наконечник, и местоположение наконечника в сложной трубчатой структуре определяют с точностью, например, приблизительно равной или меньшей, чем ширина этой трубы, если устройство не изогнуто и не упирается в любую сторону трубчатого сегмента.
В соответствии с примерным вариантом осуществления изобретения, местоположение наконечника в сложной трубчатой структуре определяют в направлении по длине трубчатого сегмента и не в направлении по ширине.
В соответствии с примерным вариантом осуществления изобретения, интервенционное устройство является по меньшей мере частично непроницаемым к рентгеновским лучам.
В соответствии с примерным вариантом осуществления изобретения, интервенционное устройство является направляющим проводом.
В соответствии с примерным вариантом осуществления изобретения, интервенционное устройство является системой доставки эндопротеза, например системой доставки стента с его баллоном и ориентирующими маркерами. Устройства данного типа могут применяться при коронарных операциях или нейроинтервенциях (при установке так называемых нейростентов, стентов, перенаправляющих поток, спиралей).
В соответствии с примерным вариантом осуществления изобретения, трубчатая структура содержит сосуды.
В соответствии с примерным вариантом осуществления изобретения, навигация обеспечивается в двух измерениях.
В соответствии с примерным вариантом осуществления изобретения, трубчатая структура обеспечивает всего несколько местоположений в пространстве для вмещения интервенционного устройства внутри трубчатой структуры, которая имеет, например, неплотную структуру.
В соответствии с примерным вариантом осуществления изобретения, 3-мерный набор данных создают из полученных 2-мерных проекций, например, рентгеновских ангиограмм. Например, 2-мерные проекции получают в форме ротационного ангиографического скана.
В соответствии с примерным вариантом осуществления изобретения, 3-мерный набор данных или 3-мерное представление получают из КТ-сканера, системы МРТ (магнитно-резонансной томографии), ультразвуковой системы или подобной системы.
В соответствии с примерным вариантом осуществления изобретения по меньшей мере одно 2-мерное рентгеновское изображение совмещают так, чтобы пространственная ориентация и положение 3-мерного объема 3-мерного набора данных соответствовали пространственной ориентации и положению трубчатой структуры объекта интереса в рентгеновском излучении.
В соответствии с примерным вариантом осуществления изобретения, для совмещения согласуют информацию о краях на 2-мерном изображении и в 3-мерном объеме.
В соответствии с примерным вариантом осуществления изобретения, для совмещения используют также информацию о геометрии рентгеновской системы.
В соответствии с примерным вариантом осуществления изобретения, данные 2-мерных флюороскопических рентгеновских изображений захватывают с введенным контрастным веществом.
В соответствии с примерным вариантом осуществления изобретения, в процессе навигации непрерывно отслеживают 2-мерное положение устройства и соответствующее 3-мерное положение, и навигационную информацию обеспечивают пользователю в реальном времени.
В соответствии с примерным вариантом осуществления изобретения, локальные 3-мерные параметры содержат параметры трубчатого сегмента трубчатой структуры, окружающей интервенционное устройство.
Например, в случае если трубчатая структура содержит сосуды, локальные 3-мерные параметры содержат количественные параметры, обычно, получаемые методом количественного коронарного анализа (QCA), например диаметр сосуда, площадь просвета, длина сегмента и углы разветвления.
В зависимости от типа интервенционной процедуры, в дополнение к трехмерным параметрам, в качестве дополнительной информации пользователю можно также обеспечить также другие локальные параметры, имеющие отношение к определенной точке в пространстве трубчатой структуры. Например, в качестве информации пользователю можно также указывать или передавать характеристики тканей сосудистых стенок, например кальциноз тканей.
В соответствии с примерным вариантом осуществления изобретения, локальные 3-мерные параметры содержат параметры трубчатой структуры в окрестности интервенционного устройства.
В соответствии с примерным вариантом осуществления изобретения, локальные 3-мерные параметры содержат параметры трубчатой структуры в пространственной области вокруг интервенционного устройства.
В соответствии с примерным вариантом осуществления изобретения, протяженность пространственной области задают предварительно.
В соответствии с примерным вариантом осуществления изобретения, протяженность задают предварительно в зависимости от выбранного устройства.
В соответствии с примерным вариантом осуществления изобретения, протяженность устанавливается пользователем.
В соответствии с примерным вариантом осуществления изобретения, этап h) содержит отображение навигационной информации для пользователя.
В соответствии с примерным вариантом осуществления изобретения, локальные 3-мерные параметры трубчатой структуры выделяют из ранее захваченного 3-мерного набора данных.
В соответствии с примерным вариантом осуществления изобретения, этап e) содержит этап вычисления вероятностей для разных сегментов трубчатой структуры; и максимизации суммарной вероятности на основании разных вероятностей для определения сегмента трубчатой структуры, в котором может находиться устройство. В дополнение, для суммарной вероятности собирают информацию в пространстве из 3-мерного набора данных.
Для преобразования 2-мерного положения в положение в 3-мерном наборе данных или, иначе говоря, для нахождения 3-мерного положения для 2-мерного положения возможность или вероятность для двумерного положения вычисляют трансформированием двумерного положения в линию в 3-мерном наборе данных. Затем вероятность или возможность для точки вдоль линии оказаться фактическим 3-мерным положением вычисляют уменьшением возможных положений вдоль линии, которые должны согласоваться с одним из трубчатых сегментов, которые заданы в 3-мерном наборе данных. Разумеется, это приводит к множеству сегментов, в которые может входить устройство. Например, если выполняется сопровождение во времени, то вероятность максимизируют для нескольких сосудов, что приводит к суммарным вероятностям.
Иначе говоря, ряд вычислительных этапов или процедур, содержащих несколько циклов вычисления вероятностей, обеспечивает геометрическую информацию с максимальной увеличенной вероятностью для представления фактического трехмерного положения.
В соответствии с примерным вариантом осуществления изобретения, устройство, которое можно наблюдать в виде точки при рентгеновской флюороскопии, обнаруживают в виде двух точек, разных по времени; и, на этапе e), вероятности вычисляют для точек, которые должны находиться в нескольких сегментах трубчатой структуры, и вероятности максимизируют для сокращения числа сегментов. Затем сегмент с максимальной вероятностью определяют как вмещающий устройство.
В соответствии с примерным вариантом осуществления изобретения, перед этапом h) навигационную информацию переводят в графическую справочную информацию. Кроме того, этап h) содержит этап адаптации захваченных данных изображения области интереса для навигационной информации и этап отображения адаптированных данных изображения пользователю.
В соответствии с примерным вариантом осуществления изобретения, данные 2-мерного рентгеновского изображения трансформируют в расширенные данные 2-мерного изображения посредством взаимного наложения графической справочной информации и данных 2-мерного рентгеновского изображения, и расширенные данные 2-мерного изображения отображают пользователю.
В соответствии с примерным вариантом осуществления изобретения, навигационную информацию обеспечивают пользователю, при одновременном отображении полученного 2-мерного рентгеновского изображения.
В соответствии с примерным вариантом осуществления изобретения, 3-мерную информацию представляют на 2-мерных изображениях.
В соответствии с примерным вариантом осуществления изобретения, из ранее захваченного 3-мерного набора данных формируют данные 3-мерного изображения, и данные 3-мерного изображения трансформируют в расширенные данные 3-мерного изображения посредством интегрирования графической справочной информации. Затем расширенные данные 3-мерного изображения отображают пользователю.
В соответствии с примерным вариантом осуществления изобретения, этап f) содержит этап определения ориентации окружающей трубчатой структуры; этап g) содержит этап определения ориентации устройства относительно окружающей трубчатой структуры; и этап h) содержит этап отображения индикатора ориентации.
Например, при проведении катетера или проволочного наконечника по сосудистому дереву, важно уверенно воспринимать локальную форму сосуда в трех измерениях, в частности, когда сталкиваются с сильным изгибом из плоскости или сложной извилистостью. Обычный метод трехмерного составления карты пути обеспечивает высококачественно спроецированную карту пути в плоскости флюороскопического рентгеновского изображения, но без информации о глубине или по меньшей мере менее информативную, когда имеют дело с направлением по глубине. При формировании обратной проекции устройства в 3-мерное реконструированное сосудистое дерево недостатком является то, что данное действие влечет за собой обращение к реконструируемому и, в какой-то степени, искусственному режиму наблюдения. Другая серьезная проблема состоит в том, что трехмерные данные и динамические виды в двумерной проекции не объединяются достаточно простым и естественным образом. Посредством обеспечения очень простого индикатора глубины, например вектора ориентации, в местоположении устройства упомянутое использование устройства в качестве указателя в 3-мерных данных приводит к визуализации, которая допускает удобное сочетание с динамическим изображением и не создает помех в плоскости флюороскопического изображения, которая может, благодаря этому, оставаться насколько возможно свободной и однозначной. Другим преимуществом является то, что, кроме выполнения уже упомянутых этапов отслеживания и совмещения устройства, можно просто получать информацию об ориентации из трехмерных данных, которая не нуждается в реальной сегментации. Приведенная возможность обеспечивает преимущества, касающиеся вычислительной мощности и времени вычисления, необходимых в системе.
В соответствии с примерным вариантом осуществления изобретения, индикатор ориентации является индикатором глубины, указывающим глубину трубчатой структуры.
В соответствии с примерным вариантом осуществления изобретения, индикатор ориентации является вектором ориентации.
В соответствии с примерным вариантом осуществления изобретения, навигационная информация содержит информацию о трубчатой структуре, например, одного или нескольких из группы, состоящей из диаметра, площади просвета, ткани, длины сегмента, положений разветвления и углов разветвления.
В соответствии с примерным вариантом осуществления изобретения, упомянутые параметры трубчатой структуры получают посредством сегментирования трубчатой структуры и окружающих структур.
В соответствии с примерным вариантом осуществления изобретения, сегментацию выполняют заранее с 3-мерным набором данных или 3-мерным объемом.
В соответствии с примерным вариантом осуществления изобретения, сегментацию выполняют на месте с использованием местоположения устройства в 3-мерном наборе данных в качестве начала для локальной автоматической сегментации трубчатой структуры.
В соответствии с примерным вариантом осуществления изобретения, этап g) содержит этап трансформации определенных 3-мерных параметров трубчатой структуры в графическую информацию; и этап h) содержит отображение графической информации.
В соответствии с примерным вариантом осуществления изобретения, этап g) содержит этап идентификации оптимального направления наблюдения для сегмента трубчатой структуры, окружающей интервенционное устройство; этап определения показателя отклонения текущего направления наблюдения устройства формирования рентгеновских изображений относительно оптимального направления наблюдения; и этап определения показателя перемещения для оптимального наблюдения; и этап h) содержит этап перемещения устройства формирования рентгеновских изображений относительно объекта для оптимального наблюдения.
Получение оптимального угла наблюдения устройства, которое проводят, например, по сосудистой структуре, снижает риск неправильной интерпретации пользователем, благодаря минимальному ракурсному укорачиванию или даже отсутствию ракурсного укорачивания вида, который не содержит или содержит, по меньшей мере, только минимальное число перекрывающихся сосудов. Например, в случае C-образной консоли, C-образная консоль нуждается в ручной установке оператором для получения оптимального вида. Данная операция требует полной концентрации, а также мастерства от пользователя, и характеризуется дополнительными недостатками, имеющими отношение к длительности интервенционной процедуры. Например, полученный оптимальный угол наблюдения можно использовать для подвода C-образной консоли рентгеновской системы к оптимальному углу наблюдения сегмента сосуда, указываемому устройством. В таком случае, приведенная возможность будет облегчать интервенционную процедуру, информация будет представляться пользователю оптимизированным путем, т.е. изобразительная информация будет лучше определимой и удобнее считываемой. Эта возможность означает также облегчение работы пользователя, так как пользователь сможет воспринимать информацию быстрее, что обеспечивает некоторую экономическую выгоду.
Например, при навигации направляющего провода через нервно-сосудистый пучок в область интереса, наконечник направляющего провода можно использовать как указатель. В процессе нейронавигации (навигации в мозговой ткани), C-образной консолью можно управлять в реальном времени при посредстве оптимальных углов наблюдения сегментов сосудов, через которые продвигается наконечник. Таким образом, например, можно обеспечивать удовлетворительный вид устройства и, при этом можно уменьшить дозу облучения пациента.
В соответствии с примерным вариантом осуществления изобретения, идентифицируют оптимальное направление наблюдения для определенного 3-мерного положения интервенционного устройства относительно трубчатой структуры.
В соответствии с примерным вариантом осуществления изобретения, устройство формирования рентгеновских изображений и объект перемещают относительно друг друга в соответствии с определенным показателем перемещения, чтобы собрать дополнительные данные 2-мерных флюороскопических рентгеновских изображений.
В соответствии с примерным вариантом осуществления изобретения, устройство формирования рентгеновских изображений подводят к оптимальному углу наблюдения.
В соответствии с примерным вариантом осуществления изобретения, устройство формирования рентгеновских изображений является устройством с C-образной консолью, и при этом для оптимального угла наблюдения поворот или угол наблюдения определяют как показатель перемещения; и C-образную консоль поворачивают в соответствии с углом наблюдения для захвата дополнительных данных 2-мерного флюороскопического рентгеновского изображения.
В соответствии с примерным вариантом осуществления изобретения, в оптимальном направлении наблюдения ракурсное укорачивание трубчатой структуры в месте расположения устройства является минимальным.
В соответствии с примерным вариантом осуществления изобретения, в оптимальном направлении наблюдения перекрытие трубчатых структур в месте расположения устройства является минимальным.
В соответствии с примерным вариантом осуществления изобретения, в оптимальном направлении наблюдения доза рентгеновского облучения пациента и/или клинического персонала является минимальной.
В соответствии с примерным вариантом осуществления изобретения, оптимальный угол наблюдения задается разными параметрами, при этом упомянутые параметры умножаются на разные весовые коэффициенты в зависимости от фазы интервенционной процедуры.
В соответствии с примерным вариантом осуществления изобретения, во время навигации направляющего провода, максимальный весовой коэффициент имеют дозовые параметры, тогда как во время лечения патологического изменения максимальный весовой коэффициент имеют ракурсное укорачивание и перекрытие.
В соответствии с примерным вариантом осуществления системы в соответствии с настоящим изобретением, блок обработки приспособлен перевести навигационную информацию в графическую справочную информацию. Блок обработки выполнен также с возможностью приспособления захваченных данных изображения области интереса для навигационной информации. Дисплей соединен с интерфейсом, при этом дисплей выполнен с возможностью отображения приспособленных данных изображения пользователю.
В соответствии с примерным вариантом осуществления изобретения, блок обработки приспособлен трансформировать данные 2-мерного рентгеновского изображения в расширенные данные 2-мерного изображения посредством взаимного наложения графической справочной информации и данных 2-мерного рентгеновского изображения. Дисплей выполнен с возможностью отображения расширенных данных 2-мерного изображения.
В соответствии с примерным вариантом осуществления изобретения, блок обработки приспособлен генерировать данные 3-мерного изображения из ранее захваченного 3-мерного набора данных и трансформирования данных 3-мерного изображения в расширенные данные 3-мерного изображения посредством интегрирования графической справочной информации. Дисплей выполнен с возможностью отображения расширенных данных 3-мерного изображения.
В соответствии с примерным вариантом осуществления изобретения, блок обработки приспособлен определять ориентацию окружающей трубчатой структуры и определять ориентацию устройства относительно окружающей трубчатой структуры. Дисплей выполнен с возможностью отображения индикатора ориентации.
В соответствии с примерным вариантом осуществления изобретения, блок обработки приспособлен идентифицировать оптимальное направление наблюдения для сегмента трубчатой структуры, окружающей интервенционное устройство, и определения показателя отклонения текущего направления наблюдения устройства формирования рентгеновских изображений относительно оптимального направления. Блок обработки дополнительно приспособлен определять показатель перемещения для оптимального наблюдения. Устройство получения рентгеновских изображений приспособлено перемещаться относительно объекта для оптимального наблюдения.
В другом примерном варианте осуществления настоящего изобретения обеспечивается компьютерная программа или компьютерный программный элемент, который отличается тем, что приспособлен исполнять этапы способа в соответствии с одним из вышеприведенных вариантов осуществления в соответствующей системе.
Поэтому компьютерный программный элемент может храниться в вычислительном блоке, который также может входить в состав варианта осуществления настоящего изобретения. Упомянутый вычислительный блок может быть приспособлен выполнять или организовывать выполнение этапов вышеописанного способа. Кроме того, упомянутый вычислительный блок может быть приспособлен управлять компонентами вышеописанного устройства. Вычислительный блок может быть выполнен с возможностью автоматического управления и/или исполнения команд пользователя. Компьютерная программа может быть загружена в рабочую память процессора для обработки данных. Следовательно, процессор для обработки данных может быть оснащен для выполнения способа в соответствии с изобретением.
Приведенный примерный вариант осуществления изобретения охватывает как компьютерную программу, которая с самого начала использует изобретение, так и компьютерную программу, которая, посредством обновления, превращает существующую программу в программу, которая использует изобретение.
Более того, компьютерный программный элемент может обеспечивать все необходимые этапы для выполнения процедуры примерного варианта осуществления вышеописанного способа.
В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения, предлагается компьютерно считываемый носитель информации, например CD-ROM, при этом компьютерно-считываемый носитель информации имеет записанный на нем компьютерный программный элемент, при этом компьютерный программный элемент описан в предыдущем разделе.
Однако компьютерная программа может также находиться в сети типа всемирной паутины и может быть загружена в рабочую память процессора для обработки данных из упомянутой сети. В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения, обеспечивается носитель информации для предоставления компьютерного программного элемента для загрузки, при этом компьютерный программный элемент составлен с возможностью выполнения способа в соответствии с одним из вышеописанных вариантом осуществления изобретения.
Следует отметить, что описание упомянутых вариантов осуществления изобретения приведено со ссылкой на разные предметы изучения. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы изобретения, относящиеся к способу, тогда как другие варианты осуществления описаны со ссылкой на пункты формулы изобретения, относящиеся к устройству. Однако специалист в данной области техники придет к заключению на основании вышеприведенного и нижеприведенного описания, что если не указано иначе, следует считать, что в дополнение к любому сочетанию признаков, принадлежащих к одному типу предмета изобретения, настоящая заявка охватывает любое сочетание признаков, относящихся к отличающимся предметам изобретения. Однако все признаки можно сочетать с обеспечением синергических эффектов, которые представляют собой больше, чем простая сумма признаков.
Следует отметить, что описание примерных вариантов осуществления изобретения приведено со ссылкой на разные предметы изучения. В частности, описание некоторых примерных вариантов осуществления приведено со ссылкой на пункты формулы изобретения, относящиеся к устройству, тогда как описание других примерных вариантов осуществления приведено со ссылкой на пункты формулы изобретения, относящиеся к способу. Однако специалист в данной области техники придет к заключению на основании вышеприведенного и нижеприведенного описания, что если не указано иначе, следует считать, что в дополнение к любому сочетанию признаков, принадлежащих к одному типу предмета изобретения, настоящая заявка охватывает любое сочетание признаков, относящихся к отличающимся предметам изобретения, в частности признаков из пунктов формулы изобретения, относящихся к устройству, и признаков из пунктов формулы изобретения, относящихся к способу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и дополнительные аспекты, признаки и преимущества настоящего изобретения можно также вывести из примеров вариантов осуществления, описание которых приведено ниже, и поясняются со ссылкой на примеры вариантов осуществления, которыми, однако, изобретение не ограничивается. Ниже приведено подробное описание изобретения со ссылкой на чертежи.
Фиг.1 - схематическое изображение системы навигации интервенционного устройства в соответствии с изобретением;
Фиг.2 - схематическое представление основных этапов способа навигации интервенционного устройства в соответствии с изобретением;
Фиг.3 - схематическое представление дополнительных подэтапов дополнительного примерного варианта осуществления способа, представленного на фиг.2;
Фиг.4 - схематическое представление дополнительных подэтапов способа, представленного на фиг.2;
Фиг.5 - схематическое представление дополнительных подэтапов дополнительного примерного варианта осуществления способа, представленного на фиг.2;
Фиг.6 - схематическое представление дополнительного примерного варианта осуществления способа, представленного на фиг.2;
Фиг.7 - схематическое представление дополнительных подэтапов дополнительного варианта осуществления способа, представленного на фиг.2;
Фиг.8 - схематическое представление полученного 2-мерного флюороскопического рентгеновского изображения с обнаруженным устройством;
Фиг.9 - схематическое представление плоскости изображения с устройством, показанным на фиг.8, относительно плоскости устройства;
Фиг.10 - представление расширенного 2-мерного рентгеновского изображения с одним примерным вариантом осуществления навигационной информации, обеспечиваемой пользователю;
Фиг.11 - схематическое представление дополнительного варианта осуществления навигационной информации, обеспечиваемой пользователю;
Фиг.12 - схематическое представление дополнительного примерного варианта осуществления навигационной информации, обеспечиваемой пользователю;
Фиг.13 - схематическое представление дополнительного примерного варианта осуществления навигационной информации, обеспечиваемой пользователю;
Фиг.14-18 - фигуры, аналогичные фиг.8, 10, 11, 12 и 13, с рентгеновским изображением вместо схематичного представления рентгеновского изображения для более понятного пояснения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
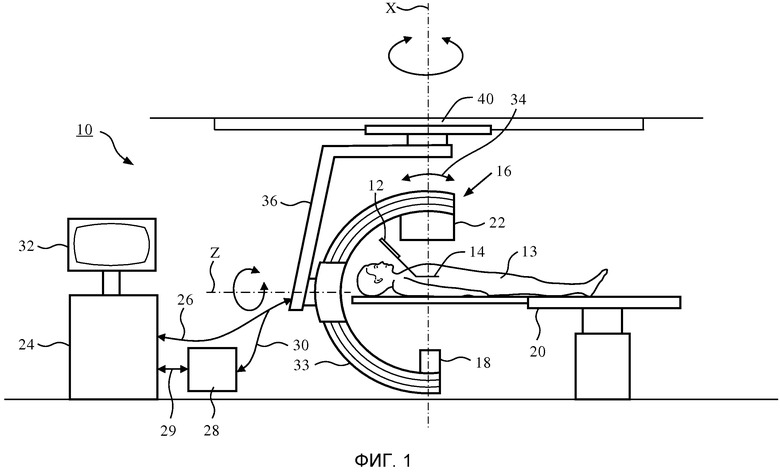
На фиг.1 схематично показана система 10 навигации интервенционного устройства 12 внутри трубчатой структуры объекта, например пациента 13. Например, интервенционное устройство является направляющим проводом для чрескожных коронарных интервенций. Направляющий провод имеет наконечник, обозначенный позицией 14, но дополнительно не показанный. Система 10 содержит устройство 16 получения рентгеновских изображений с источником 18 рентгеновского излучения, обеспеченным для генерации рентгеновского излучения. Стол 20 обеспечен для размещения субъекта, подлежащего обследованию, например пациента 13. Кроме того, устройство 16 получения рентгеновских изображений содержит детекторный модуль 22, расположенный напротив источника 18 рентгеновского излучения, т.е. во время процедуры облучения субъект обследования или пациент 13 расположен между источником 18 рентгеновского излучения и детекторным модулем 22. Последний пересылает данные в блок управления или блок 24 обработки, соединенный с устройством 16 получения рентгеновских изображений кабельным соединением 26. Разумеется, кабельное соединение 26 может быть также обеспечено в форме беспроводного соединения (не показан). Интервенционное устройство 12 соединено с интерфейсом 28, при этом данное соединение не показано на фиг.1 и может быть реализовано проводами или в виде беспроводного соединения. Интерфейс 28 соединен с блоком 24 обработки и устройством 16 получения рентгеновских изображений соединениями 29 и 30 соответственно. Кроме того, дисплей 32 соединен с блоком 24 обработки.
Устройство 16 получения рентгеновских изображений обеспечено в виде устройства получения рентгеновских изображений, так называемого C-образного типа, в котором рентгеновский источник 18 и детекторный модуль 16 расположены на противоположных концах C-образной консоли 33. C-образная консоль установлена с возможностью поворота вокруг горизонтальной оси, показанной как Z-ось. C-образная консоль может дополнительно поворачиваться по кольцу или полукольцу, указанному стрелкой 34. Кроме того, в соответствии с представленным примером, C-образная консоль 33 установлена на опоре 36, подвешенной к потолку 40, при этом опора способна поворачиваться вокруг вертикальной оси, показанной как X-ось. Таким образом, рентгеновские изображения можно получать с разных направлений разных областей интереса пациента 13.
Интерфейсное устройство 28 выполнено с возможностью ввода информации пользователем.
Следует отметить, что для примера приведен C-образный тип устройства получения рентгеновских изображений, хотя изобретение относится также к другим типам устройств получения рентгеновских изображений, например КТ-системам. Разумеется, в качестве рентгеновского источника можно применить более простое C-образное устройство, чем устройство, показанное на фиг.1.
Устройство 16 получения рентгеновских изображений приспособлено захватывать данные 2-мерных флюороскопических рентгеновских изображений в одной геометрии проекций области интереса трубчатой структуры, в показанном случае области интереса пациента 13.
Блок 24 обработки приспособлен обнаруживать интервенционное устройство 12 на 2-мерном рентгеновском изображении и определять 2-мерное положение интервенционного устройства на 2-мерном рентгеновском изображении. Блок 24 обработки дополнительно приспособлен совмещать по меньшей мере одно 2-мерное рентгеновское изображение с ранее полученным 3-мерным набором данных области интереса пациента 13.
Ранее полученный 3-мерный набор данных хранится в памяти (не показана) блока 24 обработки.
Блок 24 обработки дополнительно приспособлен отображать определенное 2-мерное положение интервенционного устройства 12 в положение в 3-мерном наборе данных для выделения локальных 3-мерных параметров трубчатой структуры, например сосудистой структуры пациента, в положении интервенционного устройства 12. Блок 24 обработки дополнительно приспособлен генерировать навигационную информацию для определенного 3-мерного положения интервенционного устройства 12 и выделенных локальных 3-мерных параметров.
Интерфейс 28 приспособлен обеспечивать навигационной информацией пользователя.
Подробное описание процедуры в соответствии с изобретением, подлежащей использованию с вышеописанной системой 12, приведено ниже.
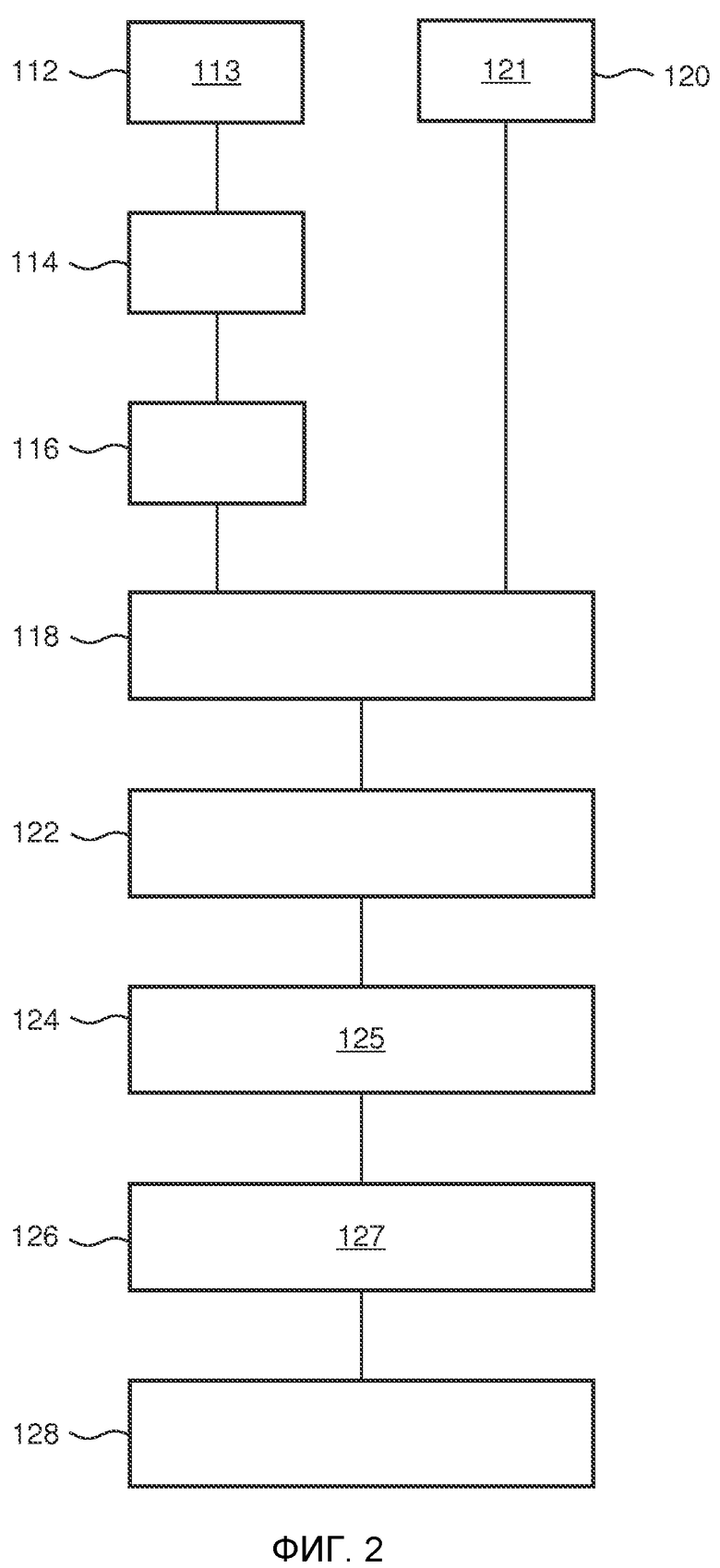
Как можно видеть из фиг.1, способ навигации интервенционного устройства 12 внутри трубчатой структуры объекта, например сосудистой структуры пациента 13, содержит следующие этапы. Во-первых, на этапе 112, захватывают данные 113 2-мерного флюороскопического рентгеновского изображения в одной геометрии проекций области интереса трубчатой структуры. Во-вторых, на этапе 114 обнаружения, обнаруживают интервенционное устройство 12 на 2-мерном рентгеновском изображении, полученном на этапе 112 захвата данных. Затем, на этапе 116 определения, определяют 2-мерное положение интервенционного устройства 12 на 2-мерном рентгеновском изображении. Затем, на этапе 118 совмещения, совмещают по меньшей мере одно 2-мерное рентгеновское изображение с ранее захваченным 120 3-мерным набором 121 данных из области интереса трубчатой структуры. Затем, на этапе 122 преобразования, преобразовывают определенное 2-мерное положение интервенционного устройства 12 в положение в 3-мерном наборе 121 данных. Затем, на этапе 124 выделения, выделяют локальные 3-мерные параметры 125 трубчатой структуры в положении интервенционного устройства 12. Далее, на этапе 126 генерирования, генерируют навигационную информацию 127 для определенного 3-мерного положения интервенционного устройства 12 и выделенных локальных 3-мерных параметров 125. Затем, на этапе 128 обеспечения, обеспечивают навигационную информацию 127 пользователю.
Например, навигация интервенционного устройства 12 является руководством для пользователя, например врача, в том числе хирурга, выполняющего медицинскую процедуру.
Например, данные 113 2-мерного флюороскопического рентгеновского изображения содержат последовательность из двух изображений с одной и той же геометрией проекций. 3-мерное положение преобразовывается, на этапе 122, посредством выделения найденной точки интервенционного устройства 12 на двух 2-мерных изображениях.
Например, одна точка на интервенционном устройстве 12 в проекции соответствует линии в 3-мерном пространстве, и устройство 12 перемещается между двумя проекциями, например, в течение времени получения двух флюороскопических рентгеновских изображений. Потенциально, линия в пространстве может находиться в нескольких сегментах трубчатой структуры, например сосудах пациента 13. Когда получают больше точек, например во времени или пространстве, неоднозначность исключают определением сегмента или сосуда, который, с максимальной вероятностью, должен вмещать устройство 12 (что не показано дополнительно в подробностях).
Например, одна геометрия проекций представляет собой захват данных методом рентгенфлюороскопии в одной плоскости.
Следует отметить, что, в соответствии с примерным вариантом осуществления, интервенционное устройство 12 расположено внутри некоторого сегмента трубчатой структуры на протяжении всей навигационной процедуры. Следовательно, устройство 12 может быть расположено только внутри пары возможных трубчатых сегментов. Например, вероятность максимизируют числом пересечений определенных 3-мерных линий, отходящих от устройства, и трубчатых сегментов, при этом пересечения соответствуют точкам.
Устройство 12 имеет наконечник, и местоположение наконечника в сложной трубчатой структуре определяют с точностью, приблизительно равной или меньшей, чем ширина трубчатого сегмента, если устройство 12 не изогнуто и не упирается в любую сторону трубчатого сегмента. Местоположение наконечника в сложной трубчатой структуре определяют в направлении по длине трубчатого сегмента и не в направлении по ширине.
Нет нужды добавлять, однако интервенционное устройство 12 является по меньшей мере частично, непроницаемым к рентгеновским лучам, чтобы данное устройство можно было обнаружить на рентгеновских изображениях. Например, интервенционное устройство является направляющим проводом. В другом примере, интервенционное устройство может содержать биопсийную иглу, или интервенционное устройство 12 является системой баллонно-расширяемого катетера для лечения стеноза или аневризмы. Интервенционное устройство может быть также спиралью или стентом, перенаправляющим поток. Интервенционное устройство может быть эндопротезом, направляющим устройством, эндопротектором или измерительным устройством любых типов.
В общем, трубчатая структура, например сосудистая структура, имеет такую неплотную структуру, что трубчатая структура обеспечивает несколько местоположений в пространстве для вмещения интервенционного устройства 12 внутри трубчатой структуры.
3-мерный набор 121 данных создают, например, из полученных 2-мерных проекций, например, рентгеновских ангиограмм. Например, 2-мерные проекции для генерирования 3-мерного набора данных получают в форме ротационного ангиографического скана.
В соответствии с другим примерным вариантом осуществления изобретения, не показанным дополнительно, 3-мерный набор данных или 3-мерное представление получают из КТ-сканера, системы МРТ (магнитно-резонансной томографии), ультразвуковой системы или подобной системы.
На этапе 118 совмещения по меньшей мере одно 2-мерное рентгеновское изображение совмещают так, чтобы пространственная ориентация и положение 3-мерного объема 3-мерного набора 121 данных соответствовали пространственной ориентации и положению трубчатой структуры в рентгеновском излучении. Например, для совмещения согласуют информацию о краях на 2-мерном изображении и в 3-мерном объеме. В случае малозаметных движений, например в случае нейроинтервенций, для данной процедуры совмещения можно использовать только геометрическую информацию.
Способ в соответствии с изобретением обеспечивает преимущество в том, что, в соответствии с примерным вариантом осуществления, 2-мерное положение устройства и соответствующее 3-мерное положение непрерывно отслеживаются в процессе навигации, и навигационная информация 127 предоставляется, на этапе 128, пользователю в реальном времени.
Например, локальные 3-мерные параметры 125 содержат параметры трубчатого сегмента трубчатой структуры, окружающей интервенционное устройство 12.
Например, упомянутые параметры относятся к окрестности интервенционного устройства 12 или, иначе говоря, к пространственной области вокруг интервенционного устройства 12. Например, протяженность пространственной области задают предварительно, например, соответственно выбранному устройству или пользовательской установке.
В соответствии с другим примерным вариантом осуществления вышеописанного способа, этап 122 преобразования содержит вычислительный этап 130, на котором вычисляются вероятности для разных каналов трубчатой структуры, как показано на фиг.3. Затем, на этапе 132 максимизации, суммарную вероятность максимизируют на основании разных вероятностей для определения, на этапе 134, сегмента трубчатой структуры, в котором может находиться устройство. Далее, для суммарной вероятности, на этапе 136, в пространстве собирается информация из 3-мерного набора 121 данных.
Например, хотя в дальнейшем подробно не показано, устройство, которое можно наблюдать в виде точки при рентгеновской флюороскопии, обнаруживают в виде двух точек, разных по времени. В соответствии с данным вариантом осуществления, на этапе преобразования, для точек, которые должны находиться в нескольких сегментах трубчатой структуры, вычисляют вероятность, и вероятности максимально повышают для уменьшения числа сегментов, и сегмент с максимальной вероятностью определяют как вмещающий устройство.
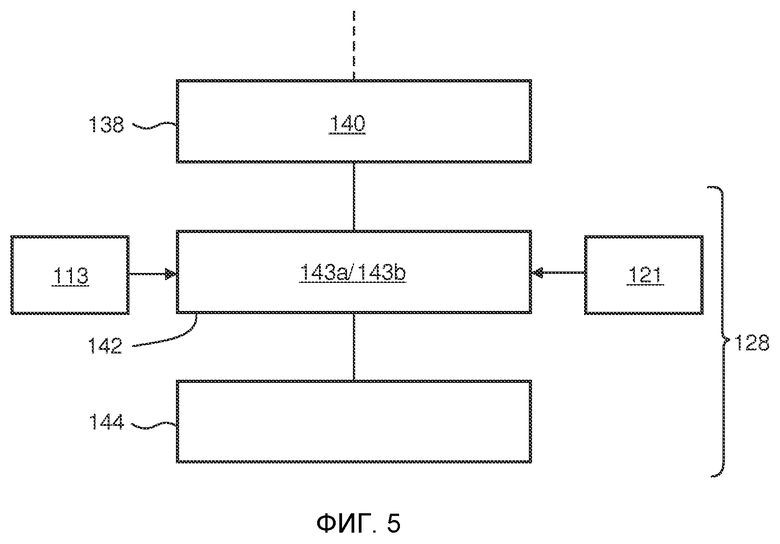
В соответствии с дополнительным примерным вариантом осуществления, показанным на фиг.4, перед этапом 128 обеспечения, навигационную информацию 127 переводят138 в графическую справочную информацию 140. Этап 128 обеспечения содержит этап 142 приспособления захваченных данных изображения области интереса для навигационной информации и этап 144 отображения приспособленных данных изображения пользователю.
В соответствии с одним примером, показанным на фиг.5, данные 113 2-мерного рентгеновского изображения трансформируют в расширенные данные 143a 2-мерного изображения посредством взаимного наложения графической справочной информации 140 и данных 113 2-мерного рентгеновского изображения, и расширенные данные 143a 2-мерного изображения отображают, на этапе 144, пользователю.
В соответствии с другим примерным вариантом осуществления, из ранее захваченного 3-мерного набора 121 данных генерируют данные 3-мерного изображения, и данные 3-мерного изображения трансформируют в расширенные данные 143b 3-мерного изображения посредством присоединения графической справочной информации 140. Расширенные данные 143b 3-мерного изображения отображают пользователю на этапе 144 (см. также фиг.5).
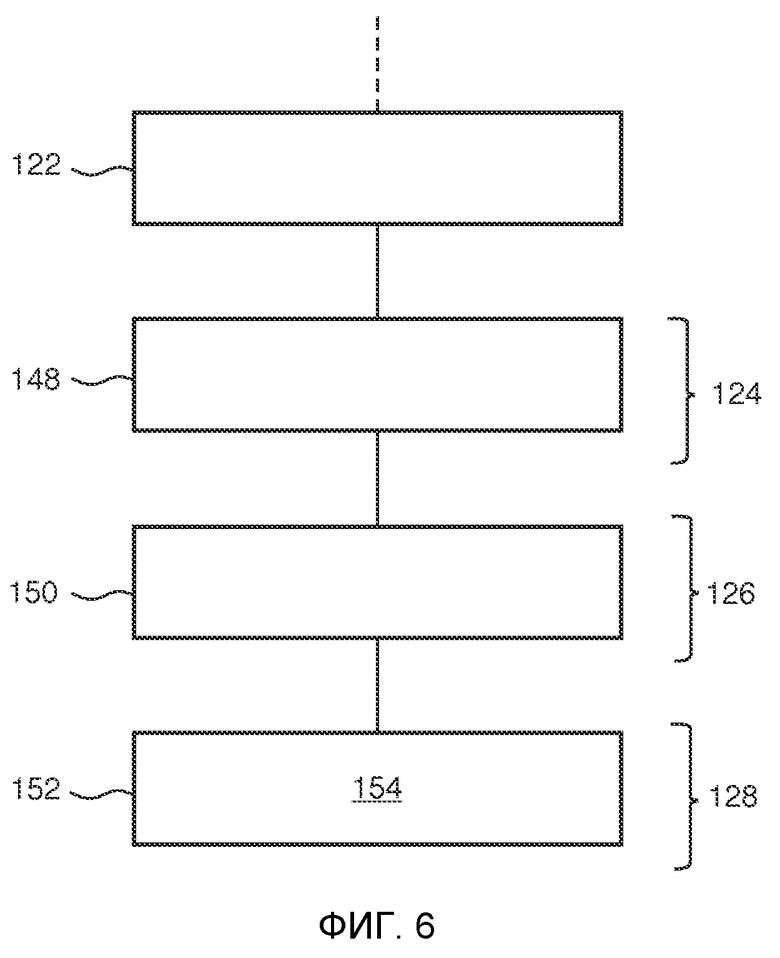
В соответствии с дополнительным примерным вариантом осуществления, показанным на фиг.6, этап 124 выделения содержит этап 148 определения ориентации окружающей трубчатой структуры. Этап 126 генерирования содержит этап 150 определения ориентации устройства 12 относительно окружающей трубчатой структуры. Кроме того, этап 128 обеспечения содержит этап 152 отображения индикатора 154 ориентации.
Например, индикатор 154 ориентации является индикатором глубины, указывающим глубину трубчатой структуры.
В дополнительном примере индикатор 154 ориентации является вектором ориентации.
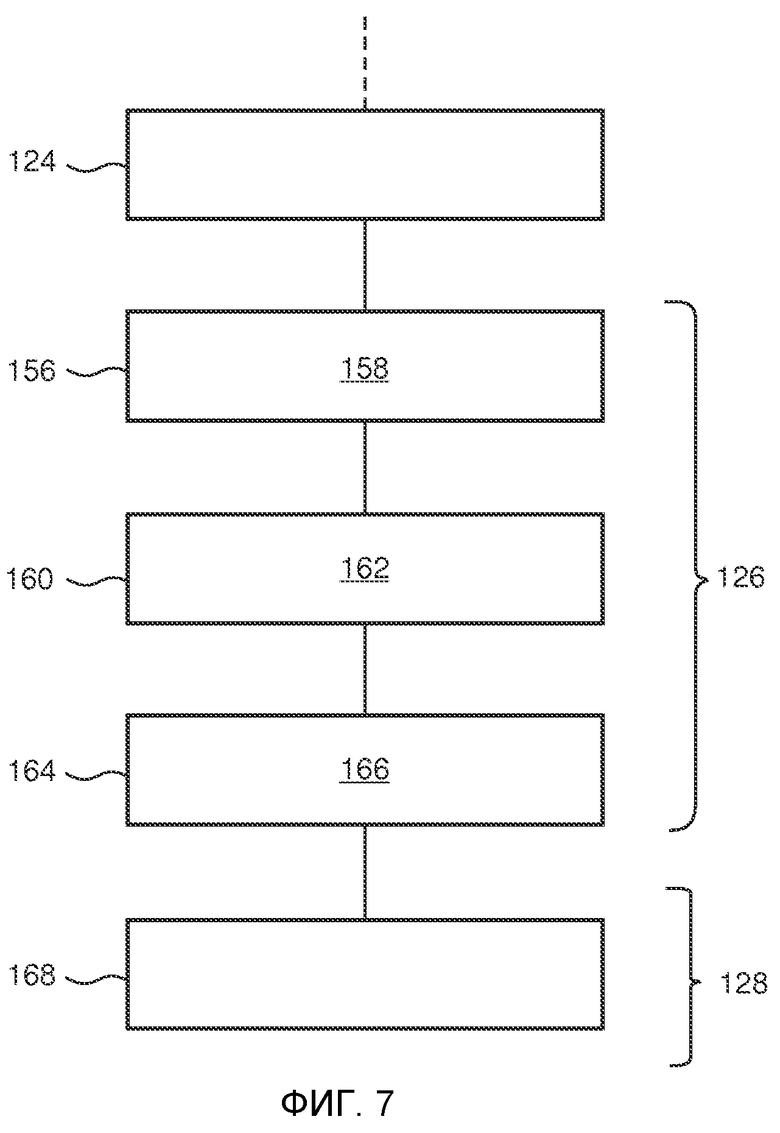
В соответствии с дополнительным примерным вариантом осуществления способа в соответствии с изобретением, показанным на фиг.7, этап 126 генерирования содержит этап 156 идентификации оптимального направления 158 наблюдения для сегмента трубчатой структуры, окружающей интервенционное устройство 12. Затем на этапе 160 определения, определяют показатель 162 отклонения текущего направления наблюдения устройства 16 формирования рентгеновских изображений от оптимального направления 158 наблюдения. Затем, на другом этапе 164 определения, определяют показатель 166 перемещения для оптимального наблюдения. Этап 128 обеспечения содержит перемещение 168 устройства 16 формирования рентгеновских изображений для оптимального наблюдения.
Например, идентифицируется оптимальное направление 158 наблюдения для определенного 3-мерного положения интервенционного устройства 12 относительно трубчатой структуры.
Например, устройство 16 формирования рентгеновских изображений и объект, то есть пациента 13, перемещают относительно друг друга в соответствии с определенным показателем перемещения, чтобы захватить дополнительные данные 2-мерных флюороскопических рентгеновских изображений. Например, при использовании C-образной консоли, C-образная консоль обеспечивает ротационное перемещение, и стол 20 является передвижным в продольном направлении для обеспечения перемещения в данном направлении. Разумеется, стол может быть передвижным в направлении, перпендикулярном продольному направлению, чтобы обеспечить систему с возможностью перемещения во всех направлениях.
В оптимальном направлении наблюдения, ракурсное укорачивание трубчатой структуры в месте расположения устройства является минимальным. В соответствии с другим примером, в оптимальном направлении наблюдения, перекрытие трубчатой структуры в месте расположения устройства является минимальным.
В соответствии с дополнительным примерным вариантом осуществления, который, разумеется, можно сочетать с вышеупомянутыми вариантами осуществления, в оптимальном направлении наблюдения, доза рентгеновского облучения пациента и/или клинического персонала является минимальной.
В соответствии с примерным вариантом осуществления, не показанным дополнительно, оптимальный угол наблюдения задается разными параметрами, при этом упомянутые параметры умножаются на разные весовые коэффициенты в зависимости от фазы интервенционной процедуры. Например, во время навигации направляющего провода, максимальный весовой коэффициент имеют дозовые параметры, тогда как, во время лечения патологического изменения максимальный весовой коэффициент имеют ракурсное укорачивание и перекрытие.
Кроме того, на фиг.10-12 схематически изображены разные примеры обеспечения, на этапе 128, навигационной информации пользователю.
На фиг.8 схематически представлено полученное 2-мерное рентгеновское изображение 213 с устройством 212, при этом наконечник 214 упомянутого устройства обнаружен и указан графическим маркером. Рентгеновское изображение представляет анатомическую информацию об объекте, например пациенте 13. Как можно видеть, рентгеновское изображение представляет часть трубчатой структуры, т.е. сосудистой структуры 215. В зависимости от типа процедуры, наконечник можно также обозначать любой, белой, цветной или штриховой линией, наиболее удобной для восприятия.
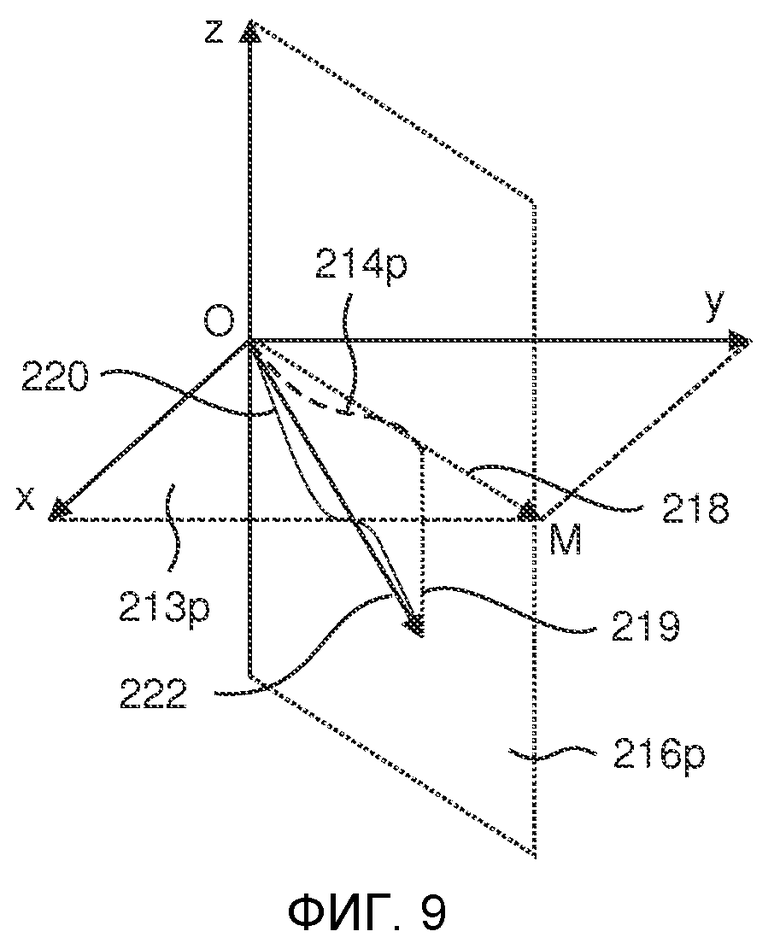
Для лучшего понимания, на фиг.9 схематически представлен вид в перспективе плоскости 213p изображения в геометрической системе координат, обозначенной X-осью, Y-осью и Z-осью. Плоскость 213p изображения, в которой получают изображение 213, задана X-осью и Y-осью. Иначе говоря, изображение 213 является видом, если можно так выразиться, наблюдаемым под некоторым углом наклона на фиг.9. Наконечник 214 устройства, наблюдаемый в плоскости 213p изображения, обозначен штриховой линией 214p. Наконечник 214 устройства находится в плоскости, заданной как плоскость 216p устройства. Плоскость 216p устройства задана Z-осью для указания глубины в изображении и вектором 218, начинающимся в точке O, которая является начальной точкой наконечника 214 устройства в плоскости 213p изображения, при этом упомянутый вектор направлен к точке M в виде линии, расположенной в горизонтальной плоскости 213p, содержащей передний конец наконечника 214. Фактическое устройство обозначено линией 220. Как можно видеть, линия 214p является проекцией линии 220 наконечника устройства на горизонтальную плоскость 213p, обозначенной соединительной линией 219, соединяющей наконечник в проекции и наконечник в его реальной ориентации по глубине. Вектор глубины наконечника 214 устройства обозначен вектором 222.
Плоскость устройства сопровождает устройство при перемещении устройства 12 относительно пациента 13.
Данная информация о направлении по глубине наконечника 214 устройства служит основной для навигационной информации, подлежащей предоставлению пользователю.
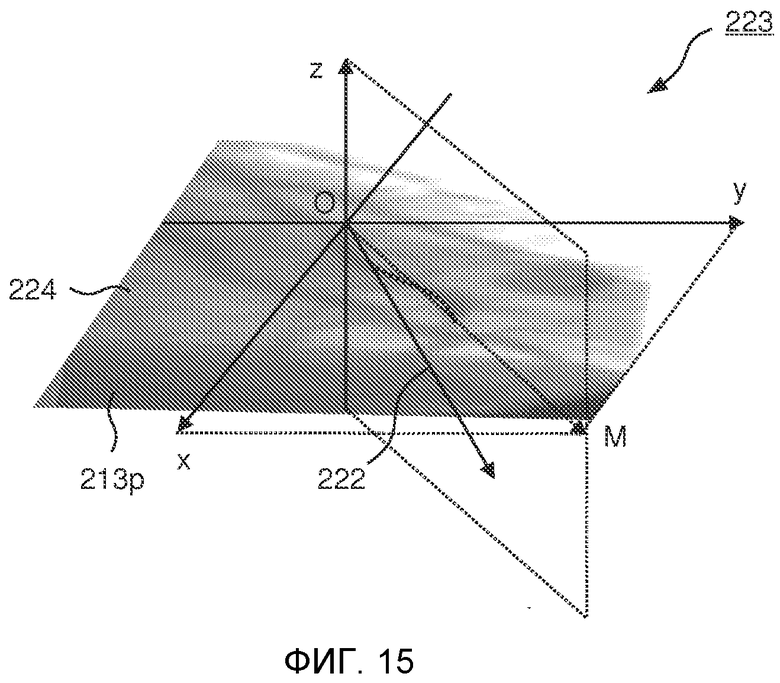
На фиг.10 представлен примерный вариант осуществления, в котором, для обеспечения пользователя информацией о глубине для проводки устройства 212, 2-мерное рентгеновское изображение 213 деформировано в деформированное 2-мерное изображения 224, расположенное в плоскости 213p изображения. Деформированное изображение 224 обеспечивает врачу такую же информацию, как реальное изображение, но только в искаженном или деформированном виде, и, тем самым, создает впечатление пространственного или 3-мерного расположения, но без предоставления графических средств, используемых с 2-мерными изображениями. Система координат XYZ, обозначение плоскости изображения и обозначение плоскости устройства обеспечивают подходящее впечатление об ориентации наконечника 214 устройства вместе с вектором 222 глубины. Следовательно, на фиг.10 представлено расширенное 2-мерное изображение 223 в качестве навигационной информации.
Еще лучшее восприятие информации может быть достигнуто приданием некоторой затененности слою 2-мерного изображения (не показано). В таком случае, можно увереннее проводить различие между устройством, направленным вверх из плоскости изображения, и устройством, направленным вниз (как на фигуре).
В соответствии с примерным вариантом осуществления (не показан), для системы координат используют цвета, плоскости изображения и плоскости устройства, а также для наконечника устройства и вектора.
Другой примерный вариант осуществления показан на фиг.11, на котором наконечник 314 устройства обнаруживают на полученном 2-мерном флюороскопическом рентгеновском изображении 313, при этом наконечник устройства показан, например, белой линией. Разумеется, на цветном дисплее наконечник устройства может быть показан в цвете, например красным цветом. Внутри изображения 313 показан уменьшенный вариант или пиктограмма 321 системы координат, изображенной на фиг.9, что обеспечивает расширенное 2-мерное изображение 323. Фактическая ориентация устройства относительно плоскости изображения показана вектором 322 глубины, выполняющим роль навигационной информации.
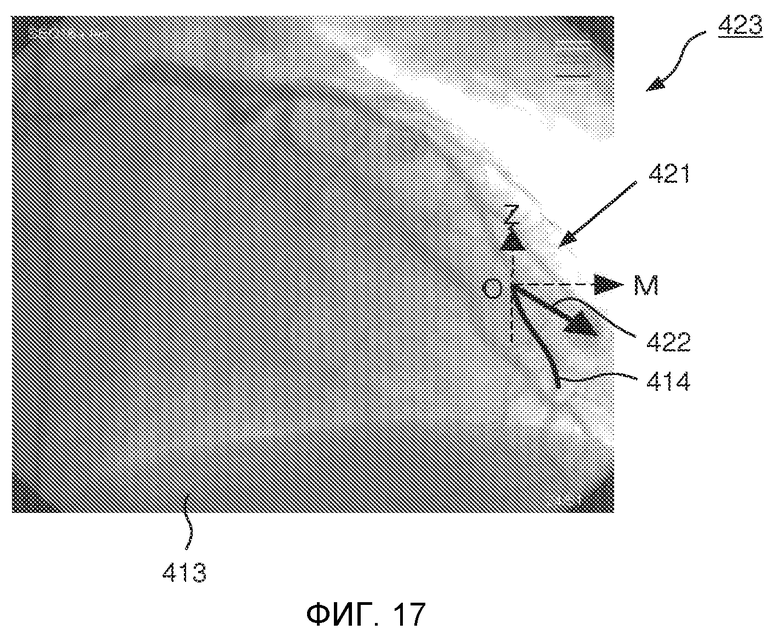
Другой примерный вариант осуществления показан на фиг.12. Вместо 3-мерной системы координат, на рентгеновском изображении 413 показана дополнительно уменьшенная пиктограмма 421, при этом пиктограмма 421 содержит Z-ось и ось O-M внутри плоскости изображения, т.е. вид перпендикулярен самой плоскости изображения. Данная навигационная информация обеспечивается внутри 2-мерного рентгеновского изображения 413, на котором наконечник устройства обнаруживают и указывают линией 414, которая выделена белым цветом, но, разумеется, может быть также представлена в цвете. Ориентация наконечника устройства по глубине относительно уменьшенной графической системы координат обозначена вектором 422 глубины. Соответственно, пользователю представляется расширенное 2-мерное изображение 423.
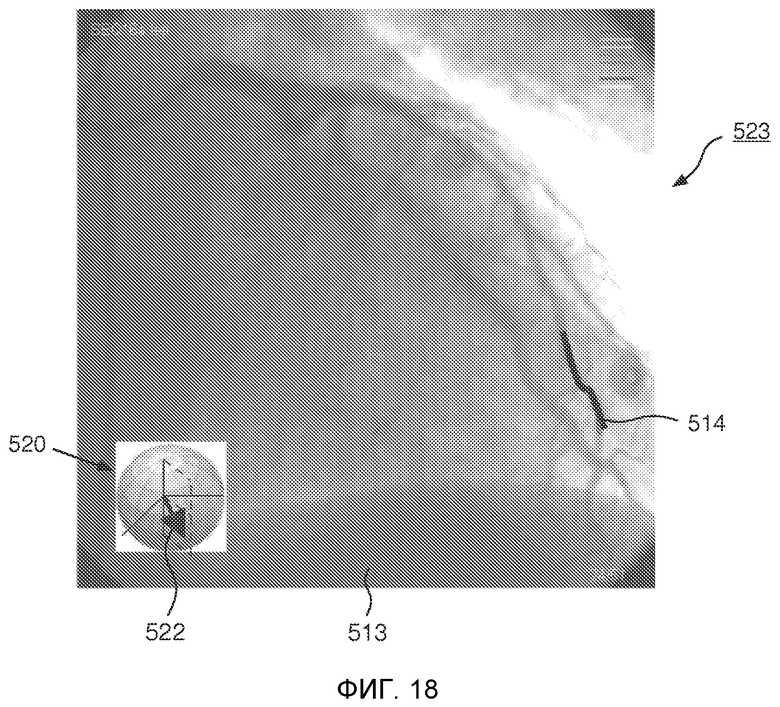
Другой примерный вариант осуществления показан на фиг.13. Наконечник устройства обозначен цветокодированным маркером 514. Цветокодирование относится к пространству цветов, описанному, например, Йоханнесом Иттеном или Филиппом Отто Рунге. По существу, спектр цветов связывают с частями поверхности сферы. Таким образом, вектор направления или вектор ориентации, расположенный в пространстве соответственно определенной ориентации, будет указывать на разные части с разными цветами. Следовательно, вышеописанный вектор глубины заменяют цветом, зависящим от его направления. В одном примерном варианте осуществления, цвет относится только к направлению вектора в плоскости, вертикальной относительно плоскости изображения. В другом примерном варианте осуществления, цвет учитывает также горизонтальный угол, который, разумеется, также виден на изображении. Для облегчения понимания, внутри 2-мерного рентгеновского изображения 513 показана цветокодированная сфера или кольцеобразное цветокодированное пространство 520 в качестве пиктограммы. Ориентация в пространстве указана стрелкой 522, направленной на цвет, в котором представлен наконечник 514 устройства. Соответственно, пользователю представляется расширенное 2-мерное изображение 523.
В соответствии с вышеприведенным уменьшенным примерным вариантом осуществления, обеспечивается простое цветокодирование вида [-pi/2, +pi/2], так как направление устройства уже известно в проекции. Например, обеспечивается контрольная цветная полоса, и наконечник непосредственно окрашивается соответствующим цветом.
В соответствии с другим примерным вариантом осуществления, но который не показан дополнительно, из ранее собранного 3-мерного набора данных генерируют данные 3-мерного изображения. Данные 3-мерного изображения трансформируют в данные расширенного 3-мерного изображения посредством объединения с графической справочной информацией простейшим способом, как описано выше, для 2-мерных рентгеновских изображений.
В соответствии с дополнительным примерным вариантом осуществления, не показанным дополнительно, один из вышеупомянутых примеров обеспечивают в цвете для дополнения или детализации навигационной информации.
При обеспечении системы и способа в соответствии, пользователя снабжают удобовоспринимаемой навигационной информацией в графической среде, то есть на 2-мерных флюороскопических рентгеновских изображениях, которая знакома большинству врачей. Таким образом, пользователь получает информацию о реальных условиях, на которую он желает полагаться, то есть информацию, предоставляемую на реальном флюороскопическом рентгеновском изображении, плюс дополнительную информацию, облегчающую проводку или навигацию интервенционного устройства внутри трубчатой структуры.
Фиг.14-18 аналогичны фиг.8, 10, 11 и 12 соответственно с рентгеновским изображением вместо схематического представления рентгеновского изображения для лучшего понимания. Для выделения наконечника устройства он указан белой линией на фиг.14.
Хотя изобретение проиллюстрировано чертежами и подробно поясняется в вышеприведенном описании, приведенные изображения и описание следует считать наглядными или примерными, но не ограничивающими. Изобретение не ограничено описанными вариантами осуществления. В процессе практического применения заявленного изобретения, специалистами в данной области техники могут быть разработаны и внесены другие изменения в предложенные варианты осуществления после изучения чертежей, описания и зависимых пунктов формулы изобретения.
В формуле изобретения, выражение «содержащий» не исключает другие элементы или этапы, и признак единственного числа не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки перечислены в разных взаимно зависимых пунктах формулы изобретения, не означает, что в подходящих случаях невозможно воспользоваться сочетанием упомянутых признаков.
Компьютерная программа может быть сохранена и/или распространяться на подходящем носителе информации, например оптическом носителе информации или твердотельном носителе информации, поставляемом совместно с другой аппаратурой или в ее составе, но может также распространяться в других формах, например по сети Интернет или посредством других проводных или беспроводных телекоммуникационных систем.
Никакие позиции в формуле изобретения не подлежат интерпретации в смысле ограничения объема изобретения.








Изобретение относится к навигации интервенционного устройства. Техническим результатом является повышение точности навигации интервенционного устройства внутри трубчатой структуры объекта. Система содержит: устройство захвата рентгеновского изображения; блок обработки; интерфейс; устройство захвата рентгеновского изображения захватывает данные 2-мерного рентгеновского изображения в одной геометрии проекции области интереса трубчатой структуры; блок обработки выполнен с возможностью обнаруживать интервенционное устройство на 2-мерном рентгеновском изображении; определяет 2-мерное положение интервенционного устройства на 2-мерном рентгеновском изображении; совмещает одно 2-мерное рентгеновское изображение с ранее захваченным 3-мерным набором данных области интереса; преобразовывает определенное 2-мерное положение интервенционного устройства в положение в 3-мерном наборе данных; выделяет локальные 3-мерные параметры в положении интервенционного устройства; генерирует навигационную информацию для определенного 3-мерного положения интервенционного устройства и выделенных локальных 3-мерных параметров; интерфейс обеспечивает навигационной информацией пользователя. 3 н. и 9 з.п. ф-лы, 18 ил.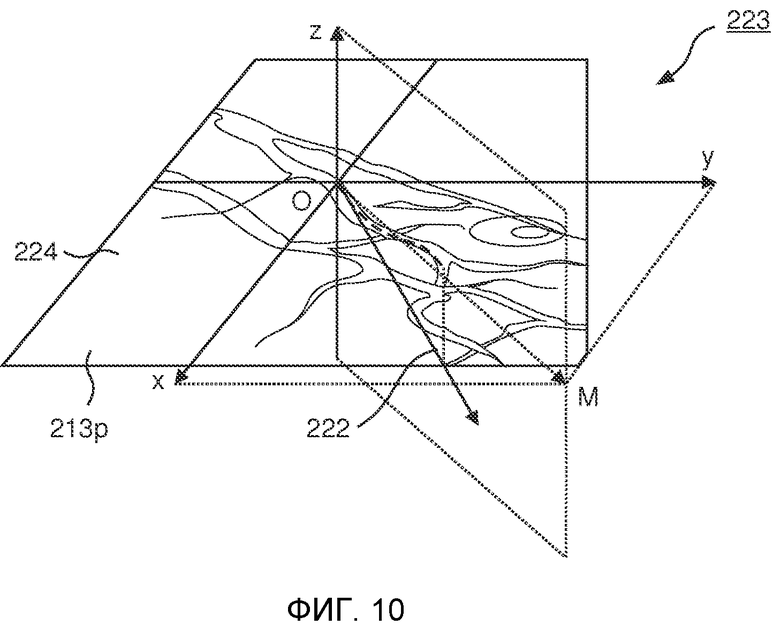
1. Система (10) навигации интервенционного устройства (12) внутри трубчатой структуры объекта (13), содержащая:
устройство (16) захвата рентгеновского изображения;
блок (24) обработки; и
интерфейс (28);
причем устройство (16) захвата рентгеновского изображения приспособлено захватывать данные 2-мерного флюороскопического рентгеновского изображения в одной геометрии проекции области интереса трубчатой структуры;
причем блок (24) обработки приспособлен обнаруживать интервенционное устройство (12) на 2-мерном рентгеновском изображении; определять 2-мерное положение интервенционного устройства (12) на 2-мерном рентгеновском изображении; совмещать по меньшей мере одно 2-мерное рентгеновское изображение с ранее захваченным 3-мерным набором данных области интереса трубчатой структуры; преобразовывать определенное 2-мерное положение интервенционного устройства в положение в 3-мерном наборе данных; выделять локальные 3-мерные параметры трубчатой структуры в положении интервенционного устройства; и генерировать навигационную информацию для определенного 3-мерного положения интервенционного устройства (12) и выделенных локальных 3-мерных параметров;
причем интерфейс (28) приспособлен обеспечивать навигационной информацией пользователя.
2. Система по п. 1, в которой блок (24) обработки приспособлен переводить навигационную информацию в графическую справочную информацию; приспосабливать захваченные данные изображения области интереса для навигационной информации; и обеспечен дисплей (32) для отображения приспособленных данных изображения пользователю.
3. Система по п. 1 или 2, в которой блок (24) обработки приспособлен определять ориентацию окружающей трубчатой структуры; определять ориентацию интервенционного устройства (12) относительно окружающей трубчатой структуры; и при этом дисплей (32) приспособлен отображать индикатор ориентации.
4. Система по любому из пп. 1, 2, в которой блок (24) обработки приспособлен идентифицировать оптимальное направление наблюдения для сегмента трубчатой структуры, окружающей интервенционное устройство (12); определять показатель отклонения текущего направления наблюдения устройства (16) получения рентгеновского изображения относительно оптимального направления наблюдения; и определять показатель перемещения для оптимального наблюдения; и при этом устройство (16) получения рентгеновского изображения приспособлено перемещаться относительно объекта для оптимального наблюдения.
5. Способ навигации интервенционного устройства (12) внутри трубчатой структуры объекта, при этом способ содержит следующие этапы:
a) захватывают (112) данные (113) 2-мерного флюороскопического рентгеновского изображения в одной геометрии проекции области интереса трубчатой структуры;
b) обнаруживают (114) интервенционное устройство (12) на 2-мерном рентгеновском изображении;
c) определяют (116) 2-мерное положение интервенционного устройства на 2-мерном рентгеновском изображении;
d) совмещают (118) по меньшей мере одно 2-мерное рентгеновское изображение с ранее захваченным (120) 3-мерным набором (121) данных области интереса трубчатой структуры;
e) преобразовывают (122) определенное 2-мерное положение интервенционного устройства в положение в 3-мерном наборе (121) данных;
f) выделяют (124) локальные 3-мерные параметры (125) трубчатой структуры в положении интервенционного устройства (12);
g) генерируют (126) навигационную информацию (127) для определенного 3-мерного положения интервенционного устройства (12) и выделенных локальных 3-мерных параметров (125); и
h) обеспечивают (128) навигационную информацию (127) пользователю.
6. Способ по п. 5, в котором этап е) содержит вычисление (130) вероятностей для разных сегментов трубчатой структуры и максимизацию (132) суммарной вероятности на основании разных вероятностей для определения (134) сегмента трубчатой структуры, в котором может находиться интервенционное устройство (12); при этом для суммарной вероятности собирают (136) информацию в пространстве из 3-мерного набора данных.
7. Способ по п. 5 или 6, в котором перед этапом h) навигационную информацию переводят (138) в графическую справочную информацию (140), и при этом этап h) содержит приспособление (142) захваченных данных изображения области интереса для навигационной информации и отображение (144) приспособленных данных изображения пользователю.
8. Способ по одному из пп. 5, 6, в котором данные 2-мерного рентгеновского изображения трансформируют в расширенные данные (143а) 2-мерного изображения посредством взаимного наложения графической справочной информации (140) и данных (113) 2-мерного рентгеновского изображения; и при этом расширенные данные (143а) 2-мерного изображения отображают (144) пользователю.
9. Способ по одному из пп. 5, 6, в котором данные 3-мерного изображения генерируют из ранее захваченного 3-мерного набора (121) данных, и при этом данные 3-мерного изображения трансформируют в расширенные данные (143b) 3-мерного изображения посредством интегрирования графической справочной информации (140); причем расширенные данные (143b) 3-мерного изображения отображают (144) пользователю.
10. Способ по одному из пп. 5, 6, в котором этап f) содержит определение (148) ориентации окружающей трубчатой структуры; при этом этап g) содержит определение (150) ориентации устройства относительно окружающей трубчатой структуры; и причем этап h) содержит отображение (152) индикатора (154) ориентации.
11. Способ по одному из пп. 5, 6, в котором этап g) содержит идентификацию (156) оптимального направления (158) наблюдения для сегмента трубчатой структуры, окружающей интервенционное устройство; определение (160) показателя (162) отклонения текущего направления наблюдения устройства формирования рентгеновских изображений относительно оптимального направления наблюдения; и определение (164) показателя (166) перемещения для оптимального наблюдения; и при этом этап h) содержит перемещение (168) устройства (16) получения рентгеновского изображения относительно объекта для оптимального наблюдения.
12. Считываемый компьютером носитель информации, содержащий программный элемент для управления системой по одному из пп. 1-4, при этом упомянутый элемент при исполнении блоком обработки приспособлен выполнять этапы способа по одному из пп.5-11.
| US7010080 B2, 07.03.2006 | |||
| US20070189457 A1, 16.08.2007 | |||
| WO2007113705 A1, 11.10.2007 | |||
| СПОСОБ ЭНДОВАСКУЛЯРНОЙ ТРАНСМИОКАРДИАЛЬНОЙ РЕВАСКУЛЯРИЗАЦИИ | 2007 |
|
RU2359622C1 |

