ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к управлению помехами, оптимизации качества сигнала и усовершенствованиям сигнализации, чтобы улучшить производительность измерения наблюдаемой разности времени поступления (OTDOA) в беспроводных приемниках с целью содействия оценке позиции пользователя в беспроводных сетях.
УРОВЕНЬ ТЕХНИКИ
Беспроводные сети связи широко известны. Некоторые сети являются полностью уникальными, в то время как другие подчинены одному или более стандартам, чтобы позволить различным производителям изготавливать оборудование, такое как беспроводные терминалы, для типовой системы. Одной такой сетью, основанной на стандартах, является универсальная система мобильной связи (UMTS). UMTS стандартизована с помощью проекта партнерства третьего поколения (3GPP), сотрудничества между группами ассоциаций в области связи в рамках международного проекта 2000 в области мобильной связи международного союза электросвязи (ITU). В настоящее время продвигаются попытки, чтобы разработать стандарт усовершенствованной UMTS, который обычно упоминают как долгосрочное развитие (LTE) UMTS или наземный радиодоступ усовершенствованной UMTS (E-UTRA).
В соответствии с версией 8 стандарта или спецификации E-UTRA или LTE передачи нисходящей линии связи из базовой станции (также известной как “усовершенствованный узел В” или просто “eNB”) в беспроводной терминал или устройство связи (также известное, как “пользовательское оборудование” или “UE”) используют мультиплексирование с ортогональным частотным разделением (OFDM). В OFDM ортогональные поднесущие модулируют с цифровым потоком, который может включать в себя данные, управляющую информацию или другую информацию, таким образом, чтобы сформировать набор символов OFDM. Поднесущие могут быть смежными или несмежными, и модуляция данных нисходящей линии связи может быть выполнена с использованием квадратурной фазовой манипуляции (QPSK), квадратурной амплитудной модуляции 16-го порядка (16QAM), квадратурной амплитудной модуляции 64-го порядка (64QAM) или тому подобной. Символы OFDM конфигурируют в подкадр нисходящей линии связи для передачи из базовой станции. Каждый символ OFDM имеет некоторую длительность по времени и связан с циклическим префиксом (CP). Циклический префикс по существу является защитным периодом между последовательными символами OFDM в подкадре. В соответствии со спецификацией E-UTRA обычный циклический префикс приблизительно равен 5 микросекундам, а расширенный циклический префикс приблизительно равен 16,67 микросекундам.
В противоположность нисходящей линии связи, передачи восходящей линии связи из UE в eNB используют множественный доступ с частотным разделением с одной несущей (SC-FDMA), в соответствии со стандартом E-UTRA. В SC-FDMA передачу блока символов данных QAM выполняют сначала с помощью расширения (или предварительного кодирования) с дискретным преобразованием Фурье (DFT), за которым следует отображение поднесущей в традиционный модулятор OFDM. Использование предварительного кодирования DFT дает возможность умеренного кубического показателя/отношения максимальной к средней мощности (PAPR), дающего в результате уменьшенную стоимость, размер и потребление мощности усилителя мощности UE. В соответствии с SC-FDMA, каждая поднесущая, используемая для передачи восходящей линии связи, включает в себя информацию для всех переданных модулированных сигналов, причем входной поток данных расширяют по ним. Передачей данных в восходящей линии связи управляют с помощью eNB, включая передачу запросов планирования (и информации планирования), посланных с помощью управляющих каналов нисходящей линии связи. Предоставления планирования для передач восходящей линии связи предоставляют с помощью eNB в нисходящей линии связи, и они включают в себя, среди прочего, выделение ресурса (например, размер блока ресурса на интервал в одну миллисекунду (мс)) и идентификацию модуляции, используемой для передач восходящей линии связи. С дополнительной модуляцией более высокого порядка и адаптивной модуляцией и кодированием (AMC) возможна большая спектральная эффективность с помощью планирования пользователей с благоприятными состояниями канала.
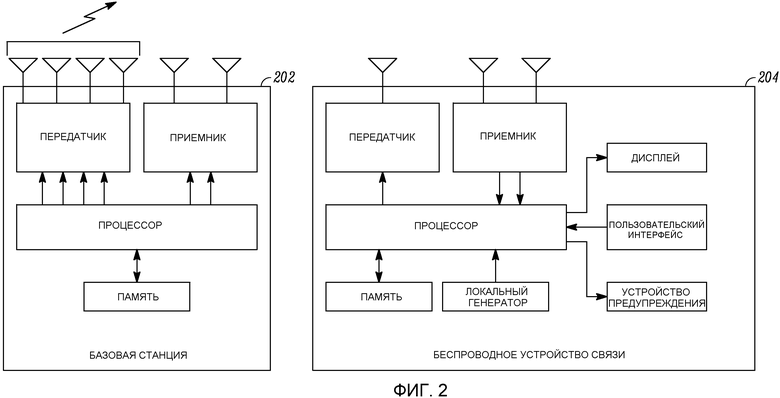
Системы E-UTRA также способствуют использованию антенных систем с множеством входом и множеством выходов (MIMO) в нисходящей линии связи, чтобы увеличить емкость. Как известно и проиллюстрировано на фиг.2, антенную систему MIMO используют в eNB 202 посредством использования множества антенн 204 передачи, а в UE посредством использования множества антенн приема. UE может полагаться на пилотные или опорные символы (RS), посланные из eNB 22, для оценки канала, последующую демодуляцию данных и измерение качества линии связи для сообщения. Измерения качества линии связи для обратной связи могут включать в себя такие пространственные параметры, как указатель ранга или число потоков данных, посланных в одних и тех же ресурсах, индекс матрицы предварительного кодирования (PMI) и параметры кодирования, такие как схема модуляции и кодирования (MCS) или указатель качества канала (CQI). Например, если UE определяет, что линия связи может поддерживать ранг, больший чем единица, оно может сообщить множество значений CQI (например, два значения CQI, когда ранг = 2). Кроме того, измерения качества линии связи могут сообщаться на периодической основе или апериодической основе, как проинструктировано с помощью eNB, в одном из поддерживаемых режимов обратной связи. Сообщения могут включать в себя выборочную информацию параметров частоты широкой полосы или подполосы. eNB может использовать информацию о ранге, CQI и другие параметры, такие как информация о качестве восходящей линии связи, чтобы обслуживать UE в каналах восходящей линии связи и нисходящей линии связи.
Также, как известно, современные сотовые телефоны включают в себя приемники системы глобального позиционирования (GPS), чтобы содействовать в определении местоположения устройств и их владельцев в случае экстренной необходимости и чтобы соответствовать поручениям Е-911 Федеральной комиссии по связи (FCC). При большинстве обстоятельств приемник GPS телефона может принимать сигналы из подходящего количества спутников GPS и передавать эту информацию в инфраструктуру сотовой системы для определения местоположения устройства, например, с помощью сервера определения местоположения, соединенного с беспроводной сетью или составляющего часть беспроводной сети. Однако имеются некоторые обстоятельства, при которых приемник GPS является неэффективным. Например, когда пользователь или его, или ее сотовый телефон находится внутри здания, приемник GPS может быть не в состоянии принимать сигналы из подходящего количества спутников GPS, чтобы дать возможность серверу определения местоположения определить позицию устройства. Кроме того, не требуется, чтобы беспроводные устройства в частных системах удовлетворяли поручениям E-911 FCC, и они могут не включать в себя приемник GPS. Однако могут возникать обстоятельства, при которых может быть необходимо определение местоположений беспроводных устройств, работающих в таких системах.
Чтобы компенсировать возможные периодические неэффективности системы GPS и обеспечить функциональные возможности определения местоположения в частных системах, многие беспроводные системы используют сигнализацию и включают в себя процессы, посредством которых может быть оценено местоположение беспроводного устройства. Например, во многих системах базовые станции регулярно передают опорные сигналы позиционирования, которые принимают с помощью беспроводных устройств и используют либо, чтобы определить информацию, на основании которой устройство инфраструктуры, такое как сервер определения местоположения, может вычислить (например, с помощью триангуляции и/или трилатерации) местоположение беспроводного устройства либо автономно определить местоположение беспроводного устройства (т.е. в самом беспроводном устройстве). Когда сервер определения местоположения предназначен для того, чтобы вычислять местоположение беспроводного устройства, беспроводное устройство может определить время поступления (TOA) или разность времени поступления (TDOA) после приема опорного сигнала позиционирования и передать TOA или TDOA в сервер определения местоположения с помощью обслуживающей базовой станции (т.е. базовой станции, предоставляющей услугу беспроводной связи в беспроводное устройство). Информацию TOA или TDOA обычно определяют на основании внутренних часов беспроводного устройства, установленных с помощью локального генератора, в соответствии с известными методиками.
На форуме беспроводных стандартов 3GPP проводится работа, чтобы предоставить средства для механизмов позиционирования, которые достигают равенства или даже превосходят функциональные возможности и производительность, предоставленные в настоящее время для других типов беспроводного доступа, включая GSM, WCDMA, 1xRTT и EV-DO. Задачей этой работы является включить поддержку функциональных возможностей и признаков позиционирования совместно с доступом LTE, в то же время гарантируя обратную совместимость с сетями и UE, которые поддерживают LTE и EPS, в соответствии с Rel-8 стандартов 3GPP. Желаемые функциональные возможности и признаки позиционирования включают в себя:
- протокол или протоколы позиционирования, совместимые и дающие возможность поддержки как для решения LCS плоскости управления для EPS, так и SUPL OMA;
- глобальную навигационную спутниковую систему (A-GNSS) с содействием UE и с содействием на основе UE;
- способ наземного позиционирования нисходящей линии связи, аналог E-OTD, OTDOA и AFLT, который может работать в режиме с содействием UE или режиме на основе UE (следует заметить, что будет определен один способ нисходящей линии связи); и
- усовершенствованные измерения ID соты, поступающие из UE и/или eNode B.
Предложены возможные расширения существующего сообщения измерения мобильности в Rel-8 LTE в поддержке способа нисходящей линии связи, такого как наблюдаемая разность времени поступления или OTDOA, или сокращенно способа OTD. Известны способы, которые являются сконцентрированными на UE (в которых UE может генерировать позиционное фиксирование без доставки с помощью сети дополнительных данных), а другие способы являются способами с содействием UE (в которых измерения UE доставляют в сеть или компонент сети, такой как сервер определения местоположения (LS), для комбинирования с другими данными, чтобы генерировать фиксирование местоположения).
Можно сообщать комбинацию физического идентификатора соты (PCID) целевой соты и мощность принятого опорного сигнала (RSRP) с добавлением информации об относительной синхронизации соты, измеренной с помощью UE, чтобы сформировать “триплет” измерения, т.е. PCID, RSRP и относительную синхронизацию соты, например, относительно некоторой опорной соты, обслуживающей соты, причем обслуживающая сота могла бы состоять из одной или более не совместно расположенных сот. Известны аналогичные подходы, поддерживаемые в системах WiMAX или обычных системах CDMA, включая WCDMA.
Применение таких методик известно, даже если сеть является несинхронной, включая случай, когда базовые станции, содержащие сеть, не выровнены во времени, но имеют известное взаимное смещение синхронизации.
А именно UE сообщает относительную синхронизацию как для синхронных, так и асинхронных сот, а затем сеть должна решить сделать какие-либо поправки для относительной синхронизации между BS (базовыми станциями), чтобы позволить выполнить фиксирование местоположения.
Сеть или LS дополнительно может передать относительную синхронизацию eNB, чтобы позволить UE выполнить автономные фиксирования (сконцентрированные на UE), но это также требует, чтобы сеть или LS были доступными для UE или защищенного объекта в UE, специфичные местоположения eNB, что для оператора сети может быть нежелательно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи, на которых одинаковые ссылочные номера относятся к идентичным или функционально подобным элементам по всем отдельным видам и которые вместе с подробным описанием ниже включены в описание или составляют его часть, служат для того, чтобы дополнительно проиллюстрировать различные варианты осуществления и объяснить различные принципы и преимущества, в соответствии с одним или более вариантами осуществления настоящего изобретения.
Фиг.1 - электрическая блок-схема беспроводной системы связи, предоставляющей услугу беспроводной связи в беспроводное устройство связи.
Фиг.2 иллюстрирует электрическую блок-схему примерной базовой станции, используемой в беспроводной системе связи фиг.2, и беспроводного устройства связи.
Фиг.3 - логическая блок-схема этапов, выполняемых с помощью базовой станции, чтобы генерировать подкадр нисходящей линии связи для передачи опорного сигнала позиционирования в беспроводное устройство связи.
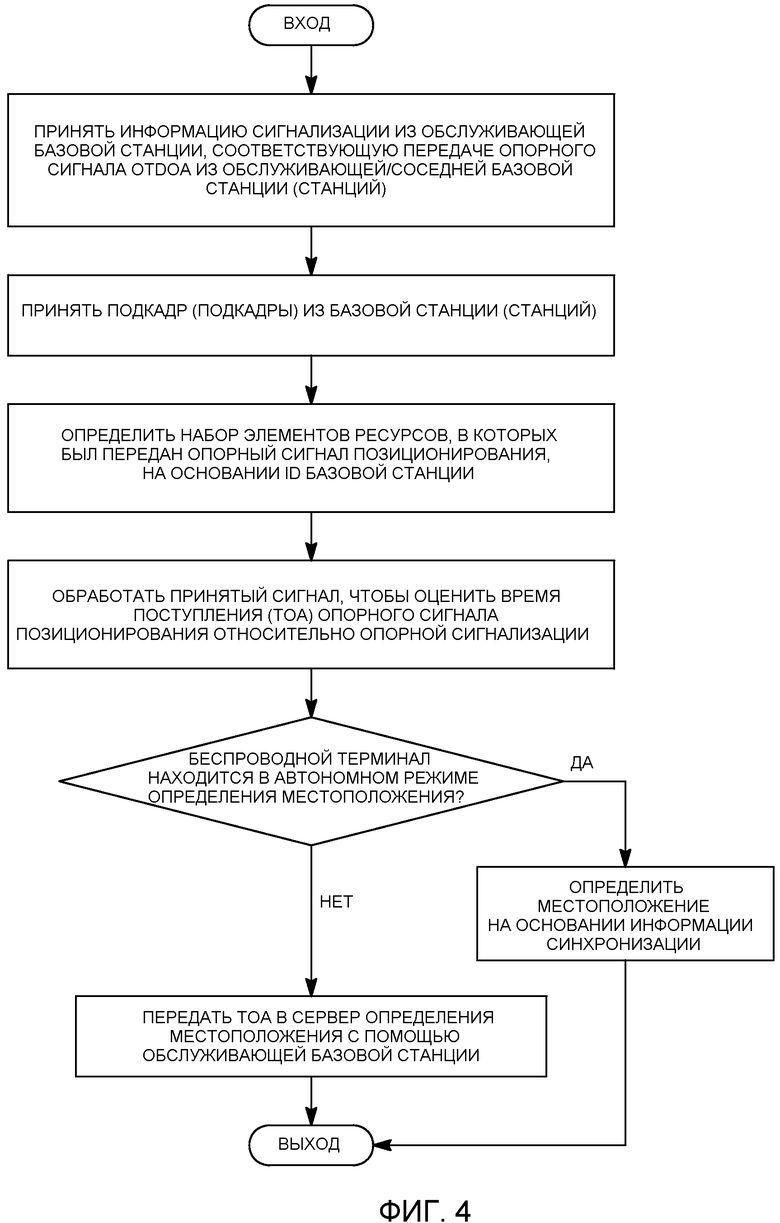
Фиг.4 - логическая блок-схема этапов, выполняемых с помощью беспроводного устройства связи, чтобы обрабатывать подкадр нисходящей линии связи, содержащий опорный сигнал позиционирования.
Фиг.5 - логическая блок-схема этапов, выполняемых с помощью беспроводного устройства связи, чтобы обрабатывать подкадр нисходящей линии связи.
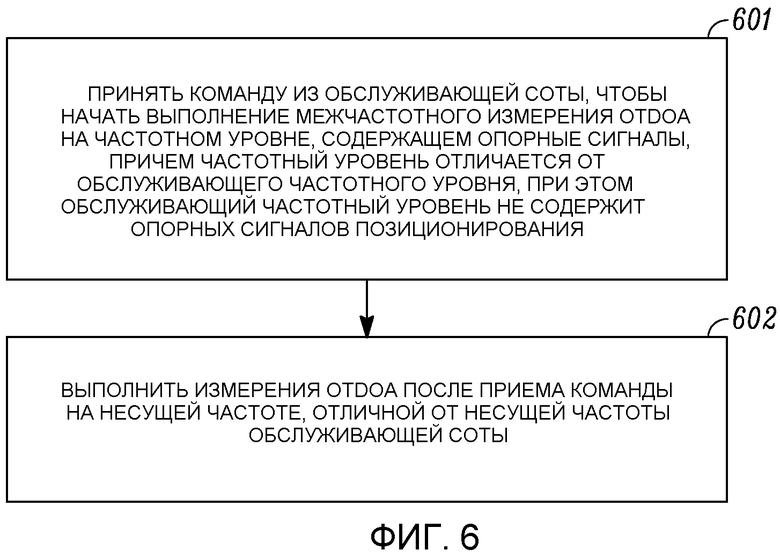
Фиг.6 - логическая блок-схема этапов, выполняемых с помощью беспроводного устройства связи, чтобы обрабатывать подкадр нисходящей линии связи.
Фиг.7 - логическая блок-схема этапов, выполняемых с помощью базовой станции, чтобы генерировать подкадр нисходящей линии связи для передачи в беспроводное устройство связи.
ПОДРОБНОЕ ОПИСАНИЕ
Помимо усовершенствования базовой последовательности опорного сигнала, может быть оптимизирована возможность наблюдения формы сигнала OTD (т.е. SINR) с использованием способов межсотового согласования (включая межсекторное), таких как способы COMP.
Один вариант осуществления, раскрытый в настоящей заявке, включает в себя способ межсотового или межсекторного согласования передачи усовершенствованного сигнала наблюдаемой разности времени (OTD). Например, множество eNB 103, 104, 105 (фиг.1), передающих усовершенствованные сигналы измерения OTD, могут делать это совместно, например, занимая одни и те же или связанные, но совместно или взаимно планируемые частотно-временные области. Если используют идентичные частотно-временные области, один “виртуальный” eNB для целей измерений OTD может быть сообщен с помощью UE 110. Такой “виртуальный” eNB может использовать форму сигнала измерения OTD или последовательность, отличную от последовательности eNB, содержащих совместную передачу. Такие совместные передачи предпочтительно могут быть сделаны с использованием синхронных передатчиков, работающих под управлением одного и того же eNB, например, совместно расположенных секторов стороны одной и той же базовой станции. В этом подходе совместно расположенные секторы передают одну и ту же форму сигнала в перекрывающихся частотно-временных ресурсах. В варианте осуществления все доступные PCID могут быть разделены на несвязные наборы S1, S2, …, SN, где S обозначает набор PCID, который может быть выделен разным совместно расположенным секторам (или, в качестве альтернативы, географически соседним секторам или сотам), управляемым с помощью одного и того же eNB. С точки зрения развертывания PCID является “ID сектора”, а индекс n Sn, который отображают в место данной базовой станции, является “ID места соты”. Затем ID места соты отображают в уникальную форму сигнала. Если развертывание места поддерживает удаленные антенны (например, с помощью RF (радиочастотной) передачи через волоконно-оптическую линию связи), eNB может совместно планировать передачу из одной или более удаленных антенн под управлением одного и того же eNB, причем, по меньшей мере, одна последовательность OTD отличается от последовательности родительского eNB, для целей оценки OTD. UE могут совместно оценивать OTD в каждый eNB, который совместно запланировал оптимизированный шаблон измерения. Совместная передача может быть ограничена только частичным поднабором блоков ресурсов (RB) в нисходящей линии связи, и eNB могут гибко планировать данные другим пользователям в RB, не использованных в содействии определения местоположения. Также было бы возможно назначать RB, которые частично заполнены пилот-сигналами определения местоположения, пользователю Rel.9 или Rel.10, который может подходящим способом согласовывать по скорости передачи данные около UE. Если вся часть PDSCH зарезервирована для содействия определению местоположения (с помощью сигнализации многоадресной широковещательной одночастотной сети (или MBSFN), или, в качестве альтернативы, одноадресной сигнализации), тогда eNB может использовать физический управляющий канал нисходящей линии связи (PDCCH), чтобы посылать дополнительную информацию содействия определению местоположения. Сигнализация MBSFN не является предпочтительной вследствие чрезмерных издержек (24 бита плюс дополнительные биты) в системной информации. В этом варианте осуществления способ в беспроводной базовой станции включает в себя совместное планирование и передачу последовательности с целью усовершенствования оценки OTD, по меньшей мере, из двух передатчиков. Дополнительно в этом варианте осуществления совместно планируемые частотно-временные ресурсы могут быть идентичными в каждом передатчике. В качестве альтернативы каждый передатчик может быть под управлением одного eNB. В качестве альтернативы переданную последовательность создают с помощью одного или более из следующего: PCID, глобального идентификатора соты (GCID), номера системного кадра (SFN), индекса подкадра, применимого идентификатора транзакции радиосети (RNTI) одной соты или канала измерения.
Один вариант осуществления относится к передаче усовершенствованного шаблона измерения межсотового OTD. Блоки системной информации (SIB) могли бы нести в себе расширенные шаблоны измерения, применимые к окружающим сотам, чтобы позволить UE 110 планировать оценки OTD этих сот. SIB могли бы быть транспортирующими (с помощью “списка соседей“ или подобного списка) взаимосвязь между PCID и “шаблоном”, или это могло быть задано в спецификациях 3GPP. Расширенные шаблоны измерений могли бы быть скомпонованы, в соответствии с шаблоном повторного использования, чтобы оптимизировать полустатические характеристики помех. Информация о шаблоне соседней соты также может быть определена с помощью считывания, по меньшей мере, части системной информации соседней соты (например, неиспользованных битов в первичном широковещательном канале (PBCH) или SIB). Шаблон измерения мог бы быть послан для каждой несущей. Например, шаблон измерения может быть послан вместе, по меньшей мере, с одним PCID и несущей частотой. Шаблон мог бы быть сигнализирован с возможностью включения в него, по меньшей мере, одного из следующего:
А) смещения подкадра(подкадров), в которых передают формы сигналов OTDOA (например, смещения относительно номера системного кадра или точки циклического возврата SFN);
b) периодичности подкадра(подкадров) OTDOA (например, множеств подкадров);
с) шаблона элемента частотно-временного ресурса (RE) в подкадре(подкадрах) OTDOA.
Базовая станция сигнализирует шаблоны измерения в UE в широковещательной передаче, что дает возможность UE определить взаимосвязь между принятым расширенным сигналом и соседней сотой, которая передала его. С помощью этого способа UE будет в состоянии определять частотно-временные ресурсы, в которых передают формы сигналов OTD из разных базовых станций. В этом варианте осуществления, относительно беспроводного терминала, способ включает в себя прием информации о расширенных шаблонах измерений, соответствующих сигналам OTD, применимым к обслуживающей соте и соседним сотам, в широковещательном сигнале (например, SIB) или сообщении конфигурации радио ресурсов (RRC). UE принимает список соседних сот вместе с взаимосвязью между PCID соседней соты и шаблоном измерения. Способ может включать в себя прием шаблона измерения, специфичного для несущей частоты. Способ может включать в себя прием шаблона измерения, который подчиняется определенному шаблону повторного использования частотно-временных ресурсов. Способ может включать в себя прием шаблона измерения с помощью считывания, по меньшей мере, части широковещательной передачи соседней соты (например, PBCH, SIB). Способ может включать в себя прием сигнализированного шаблона измерения из eNB, дополнительно состоящего из приема, по меньшей мере, одного из следующего: смещения подкадра(подкадров) OTDOA относительно опорной точки (например, точки циклического возврата SFN), периодичности подкадра(подкадров) OTDOA, шаблона RE в подкадре(подкадрах) OTDOA.
Другие варианты осуществления относятся к предоставлению поддержки протокола в измерениях OTDOA. Способам уровня 1/уровня 2 будет необходимо поддерживать протоколы позиционирования, как SUPL 2.0. UE 110 может составить список базовых станций 103-105, которые оно может измерить в некотором порядке (например, RSRP, RS-SINR и т.д.) и может запросить, чтобы сеть (NW) послала информацию о форме сигналов OTDOA из сот, которые оно может измерить. NW может послать частотно-временную информацию, соответствующую передачам, по меньшей мере, из поднабора запрошенных базовых станций. Относительно беспроводного терминала этот вариант осуществления включает в себя способ в беспроводном терминале идентификации и составления списка базовых станций, в соответствии с определенным порядком ранжирования (например, RSRP, RS-SINR). Способ может включать в себя посылку списка соседних сот в eNB с целью передачи форм сигналов OTDOA. Относительно беспроводной базовой станции этот вариант осуществления включает в себя способ в беспроводной базовой станции приема сообщения из UE, содержащего информацию, по меньшей мере, относительно одной базовой станции 103, 104, 105, которую может видеть UE. Способ может включать в себя прием частотно-временной информации, соответствующей формам сигналов OTDOA, из одной или более базовых станций (например, в Х2 или из сервера 108 определения местоположения). Способ дополнительно может включать в себя передачу частотно-временной информации, соответствующей формам сигналов OTDOA, которые будут использовать разные базовые станции (в SIB или RRC или PDCCH).
Другой вариант осуществления относится к конфигурации межчастотного промежутка для измерений OTDOA. Поскольку помеха на обслуживающей несущей частоте является функцией нагрузки в обслуживающих/соседних сотах, можно было бы закончить со сценарием, в котором ухудшены измерения OTDOA обслуживающих/соседних сот. Могло бы быть предпочтительным конфигурировать UE с возможностью измерения OTDOA сот на других несущих, где нагрузка является малой. В этом случае NW сначала может сконфигурировать UE с возможностью обнаружения и сообщения RSRP и т.д. сот, которые оно может видеть, на определенной несущей частоте. Затем NW может сконфигурировать измерения OTDOA при содействии промежутка на этих межчастотных несущих. На основании “возможности слышать” соту на определенном уровне, который может быть выведен с помощью NW на основании сообщений RSRP/RSRQ из UE, NW может сконфигурировать конкретное UE с возможностью выполнения измерений OTDOA в определенной соте на определенной несущей частоте. SFN и синхронизация подкадра OTDOA на межчастотной несущей могли бы быть неизвестными обслуживающей соте в асинхронной сети. В этом случае UE может считать MIB определенной соты на межчастотной несущей и послать его в обслуживающую соту, таким образом, чтобы она могла обеспечить промежутки в подходящие моменты времени. В зависимости от структуры и периодичности подкадра OTDOA новые шаблоны промежутка могли бы быть определены в спецификациях RRC/RRM. Например, если все формы сигналов OTDOA передают в одном подкадре, могла бы требоваться длина промежутка передачи (TGL), равная, по меньшей мере, 2 мс (= 1 мс приема сигнала + время RF переключения 2*0,5). Для синхронных развертываний могла бы быть необходима TGL, равная 3 мс, так как оказывается влияние на подкадр до и подкадр после OTDOA. Также, если форму сигнала OTDOA передают широковещательным способом с периодичностью, например, 240 мс, периодичность промежутка предпочтительно должна бы быть 240 мс или кратна этому. Конфигурация шаблона промежутка и смещение могут быть выполнены для каждого UE с помощью сообщений RRC. Конфигурация шаблона промежутка может быть явно выведена с помощью UE, как часть сообщения RRC, содержащего информацию о местоположении, посланную в UE. Этот вариант осуществления относительно беспроводного терминала включает в себя прием команды конфигурации межчастотного измерения из NW. Способ может включать в себя идентификацию и выполнение измерений RSRP или качества принятого опорного сигнала (RSRQ) и инициирование сообщения о сотах на определенной сконфигурированной межчастотной несущей. Способ может включать в себя обнаружение синхронизации SFN с помощью считывания MIB для соты на межчастотной несущей и, сообщенной в обслуживающую соту. Способ может включать в себя прием команды из NW, чтобы начать выполнение измерений OTDOA. Способ может включать в себя прием команды, причем команда включает в себя информацию относительно моментов времени, в которые разрешены промежутки передачи из обслуживающей соты (например, с помощью конфигурации промежутка измерения OTDOA и последующего удаления после истечения времени таймера или сообщения измерения). Относительно беспроводной базовой станции этот вариант осуществления может включать в себя прием сообщения измерения, состоящего из PCID и RSRP/RSRQ на определенной межчастотной несущей из UE. Способ может включать в себя прием информации о SFN обнаруженных сот из UE. Способ может включать в себя определение временного местоположения подкадров OTDOA, соответствующих соседним сотам, по меньшей мере, из одного PCID, сообщенного SFN и т.д. Способ может включать в себя конфигурирование промежутка измерения OTDOA для UE, чтобы дать возможность ему переключиться на определенную несущую частоту. Способ может включать в себя остановку промежутка измерения в ответ на истечение времени таймера или прием сообщения измерения OTDOA из UE.
Еще один вариант осуществления относится к сигнализации временных местоположений опорного сигнала позиционирования (PRS), несущей частоты, списка соседних сот и другой побочной информации. Вообще понятно, что для оценки местоположения будет использована OTDOA. Этот алгоритм зависит от способности UE “слышать” сигналы из eNB, отличные от обслуживающего eNB. Исследования показывают, что существующие обычные опорные символы не являются адекватными из перспективы возможности слышать. Таким образом, многими компаниями предложено, чтобы новые опорные символы позиционирования (PRS) периодически передавались из каждого eNB. PRS были бы периодически переданы в специальных подкадрах “PRS”. Следует заметить, что любой заданный eNB будет передавать только в части элементов ресурсов (RE) в подкадре. По меньшей мере, в одном осуществлении все RE, отличные от RE, назначенных управляющим символам и PRS, были бы не использованы данным eNB.
В синхронной системе передачи PRS синхронизированы между всеми eNB. Это имеет несколько преимуществ, включая:
1. UE может слышать другие eNB в течение подкадра PRS в любом RE, который eNB не использует, чтобы передавать управляющие сигналы или сигналы PRS. Таким образом, в течение, по меньшей мере, части подкадра PRS обслуживающий eNB заглушают. В этих RE помехи существенно уменьшают, и UE может легко слышать другие eNB.
2. Существенно уменьшают усилие поиска UE. UE должно искать только подкадры PRS для последовательностей PRS (которые находятся в подкадре PRS).
В асинхронной системе подкадры не синхронизированы и, следовательно, из этого следует, что PRS не синхронизированы. Вообще, допускается, что никакой взаимосвязи по синхронизации нет между подкадрами PRS, переданными из разных eNB. В таком случае больше невозможно для eNB давать возможность UE лучше слышать все остальные eNB с помощью собственного заглушения одного подкадра (хотя, если обслуживающий eNB PRS знает о том, когда соседние eNB посылают подкадры PRS, eNB может заглушаться, чтобы позволить UE слышать передачи PRS из выбранных соседних сот). Таким образом, в асинхронной системе возможность слышать ухудшается, если обслуживающий eNB не заглушается во время передач подкадра PRS каждого из соседних eNB.
Кроме того, поскольку подкадры PRS в не обслуживающих eNB не синхронизированы с подкадрами обслуживающего eNB, UE не знает, где искать подкадры PRS, и тогда для UE было бы необходимо постоянно сканировать последовательности PRS. В этом случае проблема является фактически более сложной, чем обнаружение SCH. Для обнаружения SCH UE может быть гарантировано, что передача SCH находится в любых 6 последовательных подкадрах. Таким образом, UE может сканировать SCH не в режиме реального времени с помощью буферизации 6 мс выборок. Подкадры PRS могли бы быть посланы только один раз каждые 100 подкадров, для UE было бы необходимо захватывать 101 мс выборок, чтобы осуществить сканирование не в реальном времени для последовательностей PRS.
Наконец, следует заметить, что для целей определения местоположения UE должно обнаруживать сигналы из соседних eNB на уровнях сигналов, более низких, чем уровни, требуемые для обнаружения поиска соты RRM с помощью канала синхронизации. Таким образом, набор соседних eNB (и соответствующая синхронизация), обнаруженных с помощью UE с помощью поиска соты RRM, является недостаточным, чтобы идентифицировать eNB, которые должны быть измерены для целей определения местоположения.
В итоге, в асинхронной системе, в которой подкадры PRS не синхронизированы:
i) UE не знает, где искать последовательности PRS, так как оно не знает местоположения подкадра PRS;
ii) UE не знает, какие eNB PRS находятся вблизи и, следовательно, не знает, какие последовательности PRS искать.
Без какого-нибудь содействия из обслуживающего eNB обнаружение PRS является значительно более сложным и трудным, и вычислительно сложным, чем обнаружение SCH.
Дополнительно следует заметить, что слепое обнаружение последовательностей PRS в очень большом пространстве поиска будет выполняться очень плохо. Слепое обнаружение последовательности PRS будет требовать того, что каждая последовательность PRS была скоррелирована со всеми возможными гипотезами синхронизации в течение 100 мс, для ширины полосы 10 MHz требуемое число корреляций на последовательность PRS превышало бы 1,5 миллиона. Для слепого обнаружения заявители обычно брали бы синхронизацию, соответствующую максимуму этих корреляций. Однако для слабого сигнала максимум большого числа корреляций при отсутствии желаемого сигнала обычно будет превышать корреляцию с наличием желаемого сигнала и, следовательно, оценка синхронизации будет некорректной. Для того чтобы ограничить сложность и улучшить производительность, необходимо ограничить рамки пространства поиска. Для того чтобы сделать это, предлагается следующее.
При инициировании запроса на определение местоположения от UE или от другого источника eNB должно:
i) сигнализировать в UE индексы (предварительно определенных) последовательностей PRS, которые UE должно искать; и
ii) сигнализировать в UE местоположение (информацию синхронизации) подкадра PRS, соответствующего каждой последовательности PRS.
Эта информация также может быть периодически передана широковещательным способом в сообщении SIB.
В асинхронной системе подкадр PRS каждой соседней соты будет частично перекрывать два из подкадров обслуживающего eNB (иначе два eNB являются синхронными). Таким образом, eNB сигнализировал бы UE с индексом первого подкадра (обслуживающей соты), с которым будет перекрываться следующий подкадр PRS соседней соты. Затем UE искало бы в течение интервала времени 2 мс, начинающегося с началом индекса подкадра, последовательность PRS соседней соты. Таким образом, интервал поиска уменьшен с 101 мс до 2 мс.
Разрешение информации о синхронизации, доступной для eNB, относительно синхронизации подкадра PRS соседнего eNB может быть значительно меньше, чем длительность подкадра 1 мс. В этом случае eNB дополнительно может уменьшить пространство поиска мобильной станции для соседнего подкадра PRS с помощью предоставления более точной информации о синхронизации в UE. В частности, eNB мог бы сигнализировать мобильной станции как с индексом подкадра, так и индексом символа для первого подкадра/символа, с которым перекрывается следующий подкадр PRS. В этом случае UE искало бы этот символ и следующие последовательные N символов для последовательности PRS, где N - число символов на подкадр. В качестве альтернативы eNB может послать эту информацию о синхронизации в UE с полным разрешением, чтобы минимизировать интервал поиска последовательности PRS для UE.
Периодичность подкадров PRS может быть конфигурируемой с помощью сети. Если так, периодичность должна быть включена в широковещательную передачу SIB. Вообще, не все сети могут выбирать одну и ту же периодичность для подкадра PRS. Кроме того, не все eNB могут использовать одну и ту же периодичность. В зависимости от нагрузки сети eNB может выбирать, чтобы передать широковещательным способом подкадры PRS либо более, либо менее часто. В одном таком осуществлении можно определить самый короткий интервал времени T для периодической передачи сигнала PRS. Вместо использования этого самого короткого интервала времени некоторые сети и/или eNB в сети могут использовать целое кратное этому базовому интервалу времени T для периодической передачи PRS. Однако в этом случае время передачи должно быть определено таким образом, чтобы в синхронной сети любые eNB, использующие одно и то же кратное N базового интервала времени T, были выровнены по времени для того, чтобы как упростить поиск PRS, так и улучшить возможность слышать PRS. Если информацию PRS сигнализируют в SIB, SIB должен включать в себя уровни частот, на которых передают подкадры PRS.
В ряде случаев сеть может поддерживать передачи PRS только на некоторых частотных уровнях, а не на других, таким образом, чтобы минимизировать связанные издержки. В качестве альтернативы может быть, что имеется недостаточно “слышимых” eNB на частотном уровне для UE, чтобы получить достаточное число измерений TOA, чтобы получить надежную оценку местоположения. В таких случаях будет необходимо для сети сигнализировать частотный уровень в UE, дополнительно к индексу и синхронизации передачи PRS. Если частотный уровень, на котором передают PRS, отличается от несущей обслуживающей соты, обслуживающая сота должна сконфигурировать промежуток измерения OTDOA. Обслуживающая сота не должна планировать данные DL и/или UL, чтобы дать возможность UE сдвинуть свою RF в целевой частотный уровень и выполнить измерения. В таком сценарии eNB должен сигнализировать синхронизацию этого промежутка в UE (например, индекс SFN/индекс подкадра/индекс символа, соответствующий началу промежутка, длительности промежутка и т.д.).
Для того чтобы улучшить возможность слышать, последовательности PRS могут периодически изменяться относительно либо набора элементов ресурсов, которые назначены, либо последовательности значений, назначенных в эти RE. Если так, специфичная для UE сигнализация или сообщение MIB должны предоставить достаточную информацию, чтобы указать текущее состояние последовательности PRS для данного eNB. Например, если передача PRS периодически сдвигается между N значений, должен быть предоставлен индекс, дающий состояние PRS в момент времени следующей передачи.
Некоторые аспекты, связанные с сигнализацией, являются следующими:
1. Измерения OTDOA, вероятно, будут выполнены в подкадре PRS или в течение подкадра с малыми помехами (например, в течение CRS с заглушением обслуживающей соты) в Rel-9 LTE, в то время как в UTRA измерения выполняют в CPICH (FDD) или другом сигнализированном канале (TDD), когда обслуживание предоставляет промежуток IPDL (т.е. набор интервалов времени, в которых обслуживающая сота заглушает передачу).
2. Возможны три сценария развертывания. В этой заявке понятие “подкадр OTDOA” используют, чтобы указать подкадр, который UE использует для измерения OTDOA, независимо от того, содержит ли он передачу PRS или только передачу CRS с заглушением обслуживающей соты.
а) Синхронный - для этого все из подкадров OTDOA выровнены, а номера SFN разных сот могут быть выровнены или не выровнены. UE должно искать PRS в небольшом поисковом окне передачи PRS обслуживающей соты (например, размер поискового окна (или SWS) = 3*CP~15 мкс для нормального CP, UE может искать подкадры OTDOA из занесенных в список соседних сот в +/-SWS подкадра OTDOA обслуживающей соты).
b) Частично выровненный - для этого случая подкадры OTDOA имеют частичное перекрытие, например, 500 мкс. UE должно искать передачу PRS из соседних сот, например, в одном подкадре PRS обслуживающей соты (например, поисковое окно = 1 подкадру). Даже для этого случая номера SFN обслуживающей и соседней сот могут быть выровнены или не выровнены. Для этого случая более чем один подкадр может быть использован для передачи PRS (например, могут быть переданы два или более последовательных подкадров со специфичными шаблонами PRS), таким образом, чтобы перекрытие подкадров OTDOA было равно, по меньшей мере, 1 мс между всеми передающими базовыми станциями). Также передача из определенной базовой станции может быть заглушена (например, для обслуживающей соты) в течение двух или более последовательных подкадров. Может быть возможным использовать комбинацию того и другого, заглушить определенный поднабор базовых станций в течение двух или более последовательных подкадров, в то время как другой поднабор базовых станций передает подкадры OTDOA в течение двух или более последовательных подкадров.
с) Асинхронный - для этого случая подкадры OTDOA могут не иметь никакого перекрытия. Для этого случая номера SFN не выровнены. Для этого случая размер поискового окна может быть установлен в максимальную периодичность передачи подкадра OTDOA (например, если максимальная периодичность передачи подкадра OTDOA равна 320 мс, установка размера поискового окна = 320 мкс позволит UE искать все соседние соты в +/- SWS подкадра OTDOA обслуживающей соты). Дополнительное содействие может быть предоставлено UE с помощью сигнализации грубого смещения синхронизации ближайшего подкадра OTDOA соседней соты относительно обслуживающей соты. В качестве альтернативы для асинхронного случая могло бы быть, что специально назначенные передачи PRS могут не иметь никакой выгоды относительно использования CRS + заглушение обслуживающей соты. Для этого случая было бы полезным сигнализировать смещение подкадра соседних сот относительно обслуживающей соты и связанную неопределенность синхронизации, чтобы помочь обработке UE. Передача CRS имеет периодичность 10 мс, а знание смещения синхронизации подкадра в радиокадре помогло бы UE ограничить свой объем корреляции шаблона CRS, соответствующего случаю заглушенного подкадра(подкадров) из обслуживающей соты. Например, длина шаблона CRS может быть установлена в 1 мс + неопределенность синхронизации, связанная с синхронизацией подкадра соседней соты, вместо корреляции принятого сигнала 1 мс с шаблоном 10 мс. Эта вспомогательная сигнализация уменьшает сложность и улучшает производительность.
Чтобы охватить все возможные случаи, сигнализация должна включать в себя следующее.
i) Обслуживающие eNB сигнализируют сценарий развертывания (например, синхронный, частично выровненный или асинхронный) непосредственно или с помощью размера поискового окна (например, SWS = 3*CP для синхронного, SWS = 0,5 мс или 1 мс для частично выровненного и SWS = большой для асинхронного).
ii) Обслуживающий eNB сигнализирует список PCID или ID мест, для которых подкадры OTDOA могут быть найдены в пределах поискового окна, соответствующего всем соседним сотам.
iii) Обслуживающий eNB сигнализирует разность SFN-SFN между самим собой и соседними сотами (в качестве альтернативы, обслуживающий eNB мог бы просто передавать “исходное значение” дельта, соответствующее состоянию передачи PRS из соседней соты).
iv) Обслуживающая сота сигнализирует информацию о частоте, связанную с соседней сотой. Разные частотные уровни могли бы иметь разные списки соседних сот, и только поднабор всех возможных частотных уровней может быть использован для передачи подкадра OTDOA.
v) Для асинхронного случая обслуживающий eNB может предоставить грубую синхронизацию подкадра OTDOA для соседних сот относительно самого себя вместо сигнализации размера поискового окна.
vi) Для асинхронного случая обслуживающий eNB может сигнализировать случай заглушения обслуживающей соты. UE ищет все соседние соты в заглушенном подкадре(подкадрах). Вспомогательные данные могут включать в себя набор PCID и, дополнительно, могут включать в себя смещения подкадров соседних сот (поскольку передача CRS повторяется один раз каждые 10 мс) относительно обслуживающего eNB и связанную неопределенность синхронизации, чтобы помочь обработке UE.
Другой вариант осуществления относительно беспроводного терминала может включать в себя прием информации сигнализации, относящейся к передаче опорного сигнала, в специально назначенных подкадре(подкадрах) (также упомянутых подкадрами OTDOA), которые имеют шаблон повторения во времени (например, один/два подкадр(подкадра) каждые N = 320 подкадров назначен(назначены) как подкадр(подкадры) OTDOA для обслуживающей базовой станции и соседних базовых станций, который включает в себя список PCID или места ID для базовой станции 103, 104, 105. Способ может включать в себя прием информации о частотном уровне, соответствующей обслуживающей и соседним базовым станциям. Способ дополнительно может включать в себя прием минимальной ширины полосы измерения, связанной с передачей опорного сигнала, с целью измерений OTDOA, применимых ко всем соседним сотам. Способ дополнительно может включать в себя прием информации о типе развертывания, относящейся к тому, что выровнены ли, выровнены ли частично или являются ли асинхронными передачи подкадров из обслуживающей и соседней сот, с помощью прямого указания или с помощью размера поискового окна UE. Способ может включать в себя прием системной синхронизации соседних сот относительно обслуживающей соты, это может быть разностью синхронизации SFN-SFN и/или разностью между состояниями передачи PRS для каждой соседней соты относительно обслуживающей соты. Способ может включать в себя прием указания, чтобы использовать CRS для измерений OTDOA и информации, относящейся к заглушенному подкадру(подкадрам) из обслуживающей соты (например, SFN + номер подкадра) в течение которого, как ожидают, UE будет выполнять измерения OTDOA соседних сот, или дополнительно, прием разности синхронизации между подкадрами для соседних сот относительно обслуживающей соты. Способ может включать в себя определение частотно-временных ресурсов, связанных с передачей опорного сигнала, предназначенного для измерений OTDOA. Способ может дополнительно включать в себя измерение времени поступления передачи из базовой станции относительно опорной синхронизации.
Другой вариант осуществления относится к обмену информацией о синхронизации PRS между eNB. Обслуживающий eNB может обнаружить синхронизацию подкадров PRS своих соседних сот с использованием интерфейсов S1 или X2 (например, номера SFN и индекса подкадра соседних сот относительно своей собственной синхронизации). Если как обслуживающий eNB, так и соседний eNB имеют GPS, тогда они могут обмениваться системными временами GPS, соответствующими передаче своих соответственных подкадров PRS. В случаях, в которых обслуживающий и/или соседний eNB не имеют доступа к системному времени GPS, должны быть использованы другие способы, чтобы сообщать это смещение синхронизации. В другом таком способе обслуживающий eNB запрашивал бы, чтобы соседний eNB предоставил интервал времени, пока он не передает свой следующий подкадр PRS, и в ответ соседний eNB сообщал бы этот интервал времени. Для того чтобы интерпретировать эту информацию, обслуживающий eNB должен был бы знать полную задержку между самим собой и соседним eNB для интерфейса S1 или X2. Эта задержка может быть откалибрована с использованием протоколов, таких как протоколы, идентифицированные в IEEE 1588. На основании информации о системной синхронизации второй базовой станции первая базовая станция затем планирует передачу опорных сигналов OTDOA с использованием информации о синхронизации, причем передачу планируют таким образом, что передачи опорного сигнала OTDOA из первой и второй базовых станций по существу перекрываются во времени, и опорные сигналы OTDOA из первой и второй базовых станций по существу являются разными. Опорный сигнал содержит последовательность символов, переданных в течение набора частотно-временных ресурсов. Если либо использованная последовательность, либо частотно-временные ресурсы, использованные для передачи опорного сигнала являются разными между двумя базовыми станциями, опорные сигналы являются разными.
Этот вариант осуществления учитывает вероятность, что передачи PRS в Rel-9 LTE могут быть полностью выровненными или частично выровненными. Установление синхронизации между базовыми станциями, вероятно, будет сделано с помощью GNSS (GNSS)/GPS и/или связи между базовыми станциями через X2. А именно, для LTE синхронизация подкадров OTDOA и связанное состояние генераторов случайных чисел (например, номера SFN), связанных с этой передачей, были бы полезными величинами, чтобы сигнализировать в UE, чтобы содействовать обработке UE. Этот вариант осуществления может включать в себя обмен информацией о синхронизации передачи подкадра OTDOA базовой станции со второй базовой станцией через интерфейс S1 или X2, где информация о сигнализации может быть опорными системными временами (например, GNSS, GPS), соответствующими подкадрам OTDOA. Информация о синхронизации может быть разностью SFN-SFN связанных передач из двух сот или специфично просто разностью между состояниями, соответствующей передачам PRS из двух сот. Информация о синхронизации может соответствовать времени для следующей передачи PRS с момента времени сигнализации. Способ может дополнительно включать в себя обмен другой побочной информацией, включающей в себя периодичность передачи PRS, информацию о синхронизации, связанную с третьей базовой станцией и т.д.
Таким образом, можно видеть, что беспроводной терминал (UE 110, фиг.1) принимает информацию сигнализации, относящуюся к передаче опорного сигнала, по меньшей мере, в одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций, как это изложено на этапе 501 (фиг.5). Беспроводной терминал определяет, по меньшей мере, из одного из идентификаторов базовых станций в списке частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенного для измерений наблюдаемой разности времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции, в блоке 502. Время поступления передачи из передающей базовой станции, относительно опорной синхронизации, измеряют на этапе 503. Эта новая операция настоящего изобретения может быть выполнена под управлением программы, выполняющейся в процессоре в UE 110, таком как процессор, проиллюстрированный в беспроводном терминале (фиг.2).
В соответствии с другим вариантом осуществления беспроводной терминал (UE 110, фиг.1) принимает команду из обслуживающей соты (базовой станции 103, 104 или 105), чтобы начать выполнение межчастотного измерения OTDOA на частотном уровне, содержащем опорные сигналы, причем частотный уровень отличается от обслуживающего частотного уровня, при этом обслуживающий частотный уровень не содержит опорных сигналов позиционирования, как указано на этапе 601 на фиг.6. Беспроводной терминал 110 может выполнить измерения OTDOA после приема команды на несущей частоте, отличной от несущей частоты обслуживающей соты, на этапе 602. Эта новая операция настоящего изобретения может быть выполнена под управлением программы, выполняющейся в процессоре в UE 110, таком как процессор, проиллюстрированный в беспроводном терминале фиг.2.
В соответствии с еще одним вариантом осуществления передатчик базовой станции (пример передатчика проиллюстрирован на фиг.2) может совместно планировать передачу опорного сигнала из множества передатчиков базовых станций (в базовых станциях 103-105) с целью усовершенствования оценки OTD, как указано на этапе 701 на фиг.7. Базовые станции 103-105 могут передавать идентичные опорные сигналы из множества передатчиков базовых станций, причем опорные сигналы являются идентичными как в последовательности сигналов, так и частотно-временных ресурсах, используемых для передачи. Эта новая операция настоящего изобретения может быть выполнена под управлением программы, выполняющейся в процессоре в каждой из базовых станций, таких как процессоры, проиллюстрированные в базовых станциях 103, 104, 195 (фиг.1 и 2).
В вышеприведенном описании описаны специфичные варианты осуществления. Однако специалист в данной области техники понимает, что могут быть сделаны различные модификации и изменения, не выходя за рамки объема изобретения, как изложено в формуле изобретения ниже. Таким образом, описание и фигуры должны быть рассмотрены в иллюстративном, а не ограничительном смысле, и подразумевают, что все такие модификации должны быть включены в рамки объема настоящих идей.
Выгоды, преимущества, решения проблем и любой элемент(элементы), которые могут вызвать какую-либо выгоду, преимущество или решение, чтобы случаться или становиться более явными, не должны быть истолкованы как критичные, необходимые или существенными признаками элементов любого или всех пунктов формулы изобретения. Изобретение определено только с помощью прилагаемой формулы изобретения, включая любые изменения, сделанные во время делопроизводства по этой заявке, и все эквиваленты этой формулы изобретения, которые изданы.
Кроме того, в этом документе относительные термины, такие как первый и второй, верхний и нижний, и тому подобные могут быть использованы только, чтобы отличать один объект или действие от другого объекта или действия, без обязательного требования или применения любой фактической такой взаимосвязи или последовательности между такими объектами или действиями. Термины “содержит”, ”содержащий”, ”имеет”, ”имеющий”, ”включает в себя”, ”включающий в себя”, ”вмещает”, ”вмещающий” или любые другие их варианты предназначены охватывать не исключающее включение, так что процесс, способ, изделие производства или устройство, которое содержит, имеет, включает в себя, вмещает в себя список элементов, не только включает в себя эти элементы, но может включать в себя другие элементы, явно неперечисленные или свойственные такому процессу, способу, изделию производства или устройству. Элемент, которому предшествует “содержит …”, ”имеет …”, ”включает в себя …”, ”вмещает …”, без больших ограничений, не препятствует существованию дополнительных идентичных элементов в процессе, способе, изделии производства или устройстве, которое содержит, имеет, включает в себя, вмещает элемент. Единственное число определяется в настоящей заявке как один или более, если иное явно не указано. Термины “по существу”, “существенно”, “приблизительно”, “около” или любые другие их версии определены как «близкие к», как понятно специалистам в данной области техники, и в одном не ограничивающем варианте осуществления термин определен, как находящийся в пределах 10%, в другом варианте осуществления в пределах 5%, в другом варианте осуществления в пределах 1%, а в другом варианте осуществления в пределах 0,5%. Термин “соединенный”, использованный в настоящей заявке, определен как подключенный, хотя необязательно непосредственно и необязательно механически. Устройство или структура, которая “сконфигурирована” определенным способом, сконфигурирована, по меньшей мере, этим способом, но также может быть сконфигурирована способами, которые не перечислены.
Будет понятно, что некоторые варианты осуществления могут использовать один или более универсальных или специализированных процессоров (или “обрабатывающих устройств”), таких как микропроцессоры, процессоры цифровых сигналов, заказных процессоров и вентильных матриц, программируемых пользователем (FPGA), и уникальных хранимых программных инструкций (включая как программное обеспечение, так и программно-аппаратное обеспечение), которые управляют одним или более процессорами, чтобы осуществлять, совместно с определенными схемами не процессора, некоторые, большинство или все из функций способа и/или устройства, описанных в настоящей заявке. В качестве альтернативы некоторые или все функции могли бы быть осуществлены с помощью конечного автомата, который не имеет хранимых программных инструкций, или в одной или более специализированных интегральных схем (ASIC), в которых каждая функция или некоторые комбинации определенных функций осуществлены как заказная логическая схема. Конечно, могла бы быть использована комбинация двух подходов.
Кроме того, вариант осуществления может быть осуществлен как компьютерно-читаемый носитель памяти, имеющий хранимый на нем компьютерно-читаемый код для программирования компьютера (например, содержащего процессор) для выполнения способа, описанного и заявленного в настоящей заявке. Примеры таких компьютерно-читаемых носителей памяти включают в себя жесткий диск, CD-ROM, оптическое запоминающее устройство, магнитное запоминающее устройство, ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство) EPROM (стираемое программируемое постоянное запоминающее устройство), EEPROM (электрически стираемое программируемое постоянное запоминающее устройство) и флэш-память, но не ограничены ими. Кроме того, предполагают, что специалист, несмотря на, возможно, существенное усилие и множество выборов конструирования, побужденный, например, имеющимся временем, современной технологией и экономическими соображениями, руководимый концепциями и принципами, раскрытыми в настоящей заявке, без труда сможет генерировать такие инструкции программного обеспечения и программы, и интегральные схемы с минимальным экспериментированием.
Реферат раскрытия предоставлен для того, чтобы позволить читателю быстро выяснить сущность технического раскрытия. Он представлен с пониманием, что не будет использован, чтобы интерпретировать или ограничить рамки объема или сущности формулы изобретения. Кроме того, в предшествующем подробном описании можно видеть, что различные признаки сгруппированы вместе в различных вариантах осуществления с целью упрощения раскрытия. Этот способ раскрытия не должен быть интерпретирован как отражение стремления, что заявленные варианты осуществления требуют больше признаков, чем явно перечислено в каждом пункте формулы изобретения. Вместо этого, как отражает следующая формула изобретения, предмет изобретения заключается в менее чем всех признаках одного раскрытого варианта осуществления. Таким образом, последующая формула изобретения включена в подробное описание, причем каждый пункт формулы изобретения говорит сам за себя как отдельно заявленный предмет изобретения.



Изобретение относится к технике беспроводной связи и может быть использовано в беспроводных приемниках. Технический результат - сокращение времени измерения наблюдаемой разности времени поступления в беспроводном терминале. Беспроводной терминал принимает информацию сигнализации, относящуюся к передаче опорного сигнала, по меньшей мере, в одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций и взаимосвязь между, по меньшей мере, одним идентификатором базовой станции и шаблоном. Терминал определяет, по меньшей мере, из одного из идентификаторов базовых станций в списке и шаблона частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенной для измерений наблюдаемой разницы времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции. Измеряют время поступления передачи из передающей базовой станции относительно опорной синхронизации. 11 з.п. ф-лы, 7 ил.
1. Способ измерения наблюдаемой разности времени поступления (OTDOA) в беспроводном терминале, включающий в себя этапы, на которых
принимают информацию сигнализации, относящуюся к передаче опорного сигнала в, по меньшей мере, одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций и взаимосвязь между, по меньшей мере, одним идентификатором базовой станции и шаблоном,
определяют из, по меньшей мере, одного из идентификаторов базовых станций в списке и шаблона, частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенной для измерений наблюдаемой разности времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции, и
измеряют время поступления передачи из передающей базовой станции относительно опорной синхронизации.
2. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию сигнализации, включающую в себя шаблон, соответствующий обслуживающей соте.
3. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию сигнализации, включающую в себя шаблон, соответствующий соседней соте.
4. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают список соседних сот вместе с взаимосвязью между идентификатором базовой станции соседней соты и шаблоном измерения.
5. Способ по п.1, в котором шаблон соответствует предварительно определенному частотно-временному повторному использованию.
6. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию о частотном уровне, соответствующую упомянутому одному идентификатору базовой станции.
7. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают минимальную ширину полосы измерения, связанную с передачами опорного сигнала, с целью измерений OTDOA, применимых к упомянутому одному идентификатору базовой станции.
8. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию о типе развертывания, относящуюся к тому, выровнены ли, выровнены ли частично или являются ли несинхронизированными передачи подкадров OTDOA с упомянутого одного идентификатора базовой станции, причем информация о типе развертывания непосредственно указывает одно из следующего: выровненное, частично выровненное, несинхронизированное или размер поискового окна.
9. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают системную синхронизацию соседней соты относительно упомянутого одного идентификатора базовой станции, причем системная синхронизация соответствует номеру системного кадра.
10. Способ по п.1, дополнительно включающий в себя этапы, на которых
принимают указание, чтобы использовать характерные для соты опорные символы (CRS) для измерений OTDOA, и
принимают информацию, относящуюся, по меньшей мере, к одному подкадру, в течение которого ожидают, что беспроводной терминал выполнит измерения OTDOA соседних сот.
11. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают разность синхронизации между подкадрами для упомянутого одного идентификатора базовой станции относительно обслуживающей соты.
12. Способ по п.1, в котором идентификатор базовой станции является, по меньшей мере, одним из следующего: физического идентификатора соты (PCID) или идентификатора места.
| US2008274753 A1, 06.11 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Ljubljana;, 8 January 2009 | |||
| RU 2007116114А , 20.11.2008 | |||

