Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к межчастотным измерениям в сетях беспроводной связи и, в частности, к поддержке сигнализации для таких измерений в архитектурах беспроводной сети, где используются измерения сигнала из множественных сот, например, для служб позиционирования, определения местоположения и служб, основанных на местоположении.
Уровень техники
Универсальная система мобильной связи (UMTS) является одной из технологий мобильной связи третьего поколений, приходящей на смену GSM. Проект долгосрочного развития систем связи (LTE) 3GPP - это проект в рамках проекта партнерства третьего поколения (3GPP), призванный усовершенствовать стандарт UMTS для удовлетворения будущих требований в отношении усовершенствованных служб, например, более высоких скоростей передачи данных, повышенной эффективности и сниженной стоимости. Универсальная наземная сеть радиодоступа (UTRAN) - это сеть радиодоступа для UMTS, и Evolved (усовершенствованная) UTRAN (E-UTRAN) - это сеть радиодоступа системы LTE. В E-UTRAN, беспроводное устройство, например, пользовательское оборудование (UE) 150a осуществляет беспроводную связь с базовой станцией 110a радиосвязи (RBS), обычно именуемой усовершенствованным NodeB (eNodeB), согласно Фиг. 1a. Каждый eNodeB 110a, 110b обслуживает одну или более областей, именуемых сотами 120a, 120b, и подключены к базовой сети. В LTE, eNodeB 110a, 110b подключены к субъекту управления мобильностью (MME) (не показан) в базовой сети. Сервер 140 позиционирования, также именуемый сервером определения местоположения, в архитектуре плоскости управления, представленной на Фиг. 1a, подключен к MME. Сервер 140 позиционирования является физическим или логическим субъектом, который управляет позиционированием для так называемого целевого устройства, т.е. беспроводного устройства, которое подлежит позиционированию. Сервер позиционирования входит в состав архитектуры плоскости управления, также именуемой Evolved Serving Mobile Location Centre (E-SMLC). Согласно Фиг. 1a, E-SMLC 140 может быть отдельным узлом сети, но также может представлять собой функциональные возможности, интегрированные в какой-то другой узел сети. В архитектуре плоскость пользователя, позиционирование составляет часть платформы определения местоположения для Secure User Plane Location (SUPL) (SLP). Сервер позиционирования может подключаться к узлам радиосети через логические линии связи, одновременно используя одно или более физических соединений через другие узлы сети, например MME. Узел 141 администрирования сети (NM) или эксплуатации и обслуживания (O&M) можно обеспечить для осуществления различных операций по администрированию сети и действий в сети.
Возможность идентификации географического положения пользователя в сети положила начало разнообразным коммерческим и некоммерческим службам, например, навигационного сопровождения, социальных сетей, рекламирования с привязкой к местоположению, экстренных вызовов и т.д. Разные службы могут иметь разные требования к точности позиционирования, предъявляемые приложением. Кроме того, в некоторых странах существуют некоторые законодательно установленные требования к точности позиционирования для основных экстренных служб, например, FCC E911 в США.
Тремя ключевыми сетевыми элементами в архитектуре позиционирования LTE являются клиент служб определения местоположения (LCS), цель LCS и сервер LCS. Сервер LCS является физическим или логическим субъектом, управляющим позиционированием для целевого устройства LCS путем сбора измерений и другой информации местоположения, помощи терминалу в осуществлении измерений, когда это необходимо, и оценивания местоположения цели LCS. Клиентом LCS является программная и/или аппаратная сущность, которая взаимодействует с сервером LCS в целях получения информации местоположения для одной или более целей LCS, т.е. позиционируемых объектов. Клиенты LCS могут располагаться в самих целях LCS. Клиент LCS отправляет запрос на сервер LCS для получения информации местоположения, и сервер LCS обрабатывает и обслуживает поступившие запросы и отправляет результат позиционирования и, в необязательном порядке, оценку скорости на клиент LCS. Запрос позиционирования может исходить от терминала или сети.
В LTE существует два протокола позиционирования, действующие через радиосеть, протокол позиционирования LTE (LPP) и дополнение LPP (LPPa). LPP является протоколом двухточечной связи между сервером LCS и целевым устройством LCS, используемым для позиционирования целевого устройства. LPP можно использовать как в плоскости пользователя, так и в плоскости управления, и множественные процедуры LPP можно осуществлять последовательно и/или параллельно, тем самым, уменьшая задержку. В плоскости управления, LPP использует протокол RRC в качестве транспортного протокола.
LPPa это протокол между eNodeB и сервером LCS, заданный, в основном, для процедур позиционирования в плоскости управления, хотя он может помогать в позиционировании в плоскости пользователя за счет запрашивания у eNodeB информации и измерений eNodeB. Протокол Secure User Plane Location (SUPL) используется в качестве транспортного протокола для LPP в плоскости пользователя. LPP также имеет возможность переносить сообщения расширения LPP внутри сообщений LPP, например, в настоящее время разрабатываются расширения LPP (LPPe) Открытого мобильного альянса (OMA), обеспечивающие, например, данные содействия, зависящие от оператора или производителя, или данные содействия, которые не могут быть снабжены LPP или для поддержки других форматов передачи отчетов о положении или новых способов позиционирования. LPPe также можно внедрять в сообщения другого протокола позиционирования, не обязательно LPP.
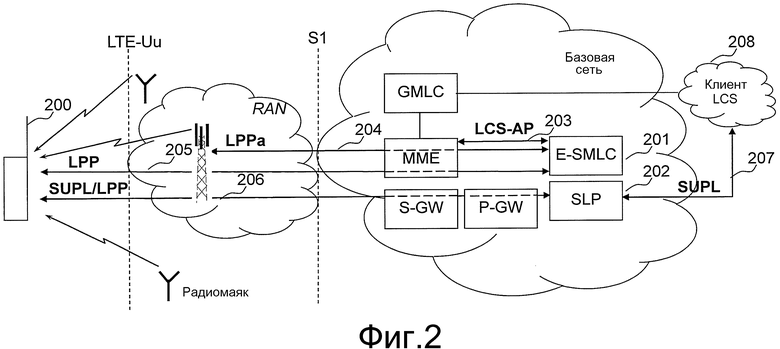
Высокоуровневая архитектура, которая в настоящее время стандартизована в LTE, изображена на Фиг. 2, где целью LCS является терминал 200, и сервером LCS является E-SMLC 201 или SLP 202. На фигуре, протоколы позиционирования в плоскости управления с E-SMLC в качестве конечной точки показаны стрелками 203, 204 и 205, протокол позиционирования в плоскости пользователя показан стрелками 206 и 207. SLP 202 может содержать два компонента, SUPL Positioning Centre (SPC) и SUPL Location Centre (SLC), которые также могут располагаться в разных узлах. В примерной реализации, SPC имеет собственный интерфейс с E-SMLC 201, и интерфейс Llp с SLC, и часть SLP, соответствующая SLC, осуществляет связь со шлюзом PDN (P-GW) (не показан) и внешним клиентом 208 LCS.
Возможно также развертывание дополнительных элементов архитектуры позиционирования для дополнительного повышения производительности конкретных способов позиционирования. Например, развертывание радиомаяков является экономичным решением, которое может значительно повысить производительность позиционирования в помещении и также вне помещения благодаря обеспечению более точного позиционирования, например, методами определения местоположения с помощью близлежащих объектов.
Позиционирование UE - это процесс определения координат UE в пространстве. Зная координаты, их можно отобразить в определенное место или положение. Функция отображения и доставка информации местоположения по запросу входят в состав службы определения местоположения, которая требуется для основных экстренных служб. Службы, которые дополнительно используют знание местоположения, или которые опираются на знание местоположения, чтобы предлагать потребителям некую добавленную стоимость, именуются службами с привязкой к местоположению и службами на основе местоположения. Возможность идентификации географического положения беспроводного устройства в сети положила начало разнообразным коммерческим и некоммерческим службам, например, навигационного сопровождения, социальных сетей, рекламирования с привязкой к местоположению и экстренных вызовов. Разные службы могут иметь разные требования к точности позиционирования, предъявляемые приложением. Кроме того, в некоторых странах существуют требования к точности позиционирования для основных экстренных служб, установленные регулирующими органами. Примером такого регулирующего органа служит Федеральная комиссия по связи, регулирующая сферу электросвязи в Соединенных Штатах.
Во многих условиях, местоположение беспроводного устройства можно точно оценить с использованием способов позиционирования на основе Глобальной системы позиционирования (GPS). В настоящее время, сети также часто имеют возможность помогать беспроводным устройствам для повышения чувствительности приемника устройства и производительности при запуске GPS, например, согласно способу позиционирования Assisted-GPS (A-GPS). Однако приемники GPS или A-GPS не всегда присутствуют во всех беспроводных устройствах. Кроме того, GPS часто дает сбой в условиях внутри помещения и в условиях окружения высокими строениями. По этой причине в 3GPP был стандартизирован дополнительный способ наземного позиционирования, именуемый Observed Time Difference of Arrival (наблюдаемая разница по времени прихода) (OTDOA). Помимо OTDOA, стандарт LTE также задает способы, процедуры и поддержку сигнализации для позиционирования расширенный ID соты (E-CID) и Assisted-Global Navigation Satellite System (A-GNSS). В будущем система Uplink Time Difference of Arrival (UTDOA) также может быть стандартизована для LTE.
Позиционирование методом OTDOA
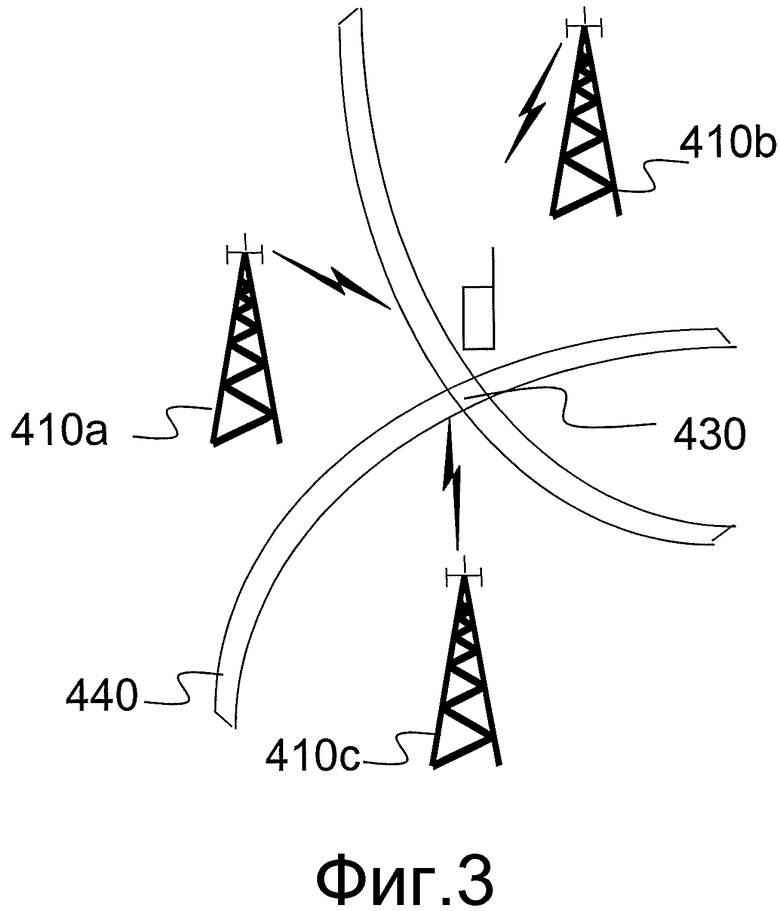
Согласно OTDOA, беспроводное устройство, например UE, измеряет временные разницы для опорных сигналов нисходящей линии связи, принятых из множественных разных мест. Для каждой измеренной соседней соты, UE измеряет разницу по времени относительно опорного сигнала (RSTD), которая является относительной временной разницей между соседней сотой и опорной сотой. Согласно Фиг.3, оценка положения UE затем определяется как точка 430 пересечения гипербол 440, соответствующих измеренным RSTD. По меньшей мере, три измерения от географически разнесенных RBS 410a-c с хорошей геометрией необходимы для решения относительно двух координат UE. Для отыскания положения необходимо точно знать местоположения передатчиков и временные смещения передачи. Расчеты положений могут проводиться, например, на узле позиционирования, например, E-SMLC или SLP в LTE, или на UE. Первый подход соответствует режиму позиционирования при содействии UE, а последний соответствует режиму позиционирования на основе UE.
В режиме дуплексной связи с частотным разделением (FDD) UTRAN, измерение SFN-SFN 2 типа (SFN обозначает номер системного кадра), осуществляемое на UE, используется для способа позиционирования OTDOA. Это измерение является относительной временной разницей между сотой j и сотой i на основании первичного общего пилот-канала (CPICH) от соты j и соты i. SFN-SFN 2 типа, сообщенное UE, используется сетью для оценивания положения UE.
Опорные сигналы позиционирования
Для обеспечения позиционирования в LTE и облегчения измерений позиционирования надлежащего качества и для достаточного количества разных местоположений, в 3GPP были введены физические сигналы, предназначенные для позиционирования, например, опорные сигналы позиционирования (PRS), и были заданы подкадры позиционирования с низкими помехами. PRS передаются из одного антенного порта R6 согласно заранее заданному шаблону, как описано более подробно ниже.
Частотный сдвиг, который является функцией физического идентификатора соты (PCI), можно применять к заданным шаблонам PRS для генерации ортогональных шаблонов и моделирования эффективного повторного использования частот, равного шести, что позволяет значительно снизить помеху от соседних сот при измерении PRS и, таким образом, улучшить измерения позиционирования. Хотя PRS специально предназначены для измерений позиционирования и, в целом, характеризуются более высоким качеством сигнала, чем другие опорные сигналы, стандарт не предписывает в обязательном порядке использовать PRS. Для измерений позиционирования также можно использовать другие опорные сигналы, например, опорные сигналы, зависящие от соты (CRS).
PRS передаются согласно заранее заданному шаблону и согласуются с одной из заранее заданных конфигураций PRS. PRS передаются в заранее заданных подкадрах позиционирования, сгруппированных по количеству N_prs последовательных подкадров, т.е. одному событию позиционирования, согласно Фиг. 4. События позиционирования происходят периодически с определенной периодичностью в N подкадров, соответствующей интервалу времени T_prs между двумя событиями позиционирования. Стандартизованные интервалы времени T_prs равны 160, 320, 640 и 1280 мс, и количество последовательных подкадров N_prs равно 1, 2, 4 и 6. Каждая заранее заданная конфигурация PRS содержит полосу передачи PRS, N_prs и T_prs.
Информация содействия OTDOA
Поскольку для позиционирования методом OTDOA необходимо измерять сигналы PRS из множественных разных мест, приемнику UE часто придется иметь дело с PRS, которые гораздо слабее, чем те, которые поступают из обслуживающей соты UE. Кроме того, не зная даже приблизительно, когда ожидать поступления измеряемых сигналов и какой именно шаблон PRS используется, UE будет вынужден осуществлять поиск сигнала в большом окне, что будет оказывать влияние на время и точность измерений, а также сложность UE. Для облегчения UE измерений, на UE передается информация содействия, также именуемая данными содействия, которая включает в себя, например, информацию опорной соты, список соседних сот, содержащий PCI соседних сот, количество последовательных подкадров нисходящей линии связи N-prs, полосу передачи PRS и частоту. Информация содействия сигнализируется по LPP с сервера позиционирования, например, E-SMLC в плоскости управления для системы LTE, на UE.
Межчастотные измерения и измерительные зазоры OTDOA
В системе OTDOA LTE, UE измеряет разницу по времени относительно опорного сигнала (RSTD), которая была задана в стандарте как относительная временная разница между сотой j и сотой i, заданная как TSubframeRxj - TSubframeRxi, где: TSubframeRxj - время, когда UE принимает начало одного подкадра из соты j, TSubframeRxi - время, когда UE принимает соответствующее начало одного подкадра из соты i, ближайшего по времени к подкадру, принятому из соты j. Точкой отсчета для наблюдаемой разницы по времени подкадров будет антенный соединитель UE. Измерения заданы для внутричастотного и межчастотного вариантов и проводятся в состоянии RRC_CONNECTED.
Межчастотные измерения, включающие в себя RSTD, проводятся в течении периодических межчастотных измерительных зазоров, которые сконфигурированы таким образом, что каждый зазор начинается на SFN и подкадре, отвечающем следующему условию:
SFN mod T=FLOOR(gapOffset/10);
подкадр=gapOffset mod 10;
где T=MGRP/10, где MGRP обозначает “период повторения измерительного зазора” и mod это функция взятия по модулю. E-UTRAN требуется согласно стандарту для обеспечения единого шаблона измерительных зазоров с постоянной длительностью зазора для одновременного мониторинга всех частотных слоев и технологий радиодоступа (RAT). Согласно стандарту, требуется, чтобы UE поддерживало две конфигурации, с MGRP равным 40 и 80 миллисекунд (мс), оба при длине измерительного зазора 6 мс. На практике, с учетом времени переключения, остается меньше 6, но, по меньшей мере, 5 полных подкадров для измерений в каждом таком измерительном зазоре.
В LTE измерительные зазоры конфигурируются сетью, т.е. eNodeB, для обеспечения возможности проведения измерений на разных частотах LTE и/или разных RAT, например, UTRA, GSM и CDMA2000. Измерение конфигурируется с использованием протокола управления радиоресурсами (RRC) для сигнализации конфигурации измерения на UE. Конфигурация зазора сигнализируется на UE в составе конфигурации измерения. Единовременно можно конфигурировать только один шаблон зазоров. Один и тот же шаблон используется для всех типов сконфигурированных измерений, например, межчастотных измерений соседней соты, межчастотных измерений позиционирования, измерений соседней соты между разными RAT, измерений позиционирования между разными RAT и т.д.
В LTE множественных несущих, межчастотные измерительные зазоры пока предназначены, в основном, для осуществления идентификации соты и измерений мобильности, например, мощности принятого опорного сигнала (RSRP) и качества принятого опорного сигнала (RSRQ). Для осуществления этих измерений UE требуется осуществлять измерения на сигналах синхронизации, т.е. первичных сигналах синхронизации (PSS) и вторичных сигналах синхронизации (SSS), и опорных сигналах, зависящих от соты (CRS), для обеспечения межчастотного хэндовера и повышения производительности системы. Сигналы синхронизации передаются по 62 ресурсным элементам в центре выделенной полосы в подкадрах 0 и 5. PSS передается в последнем символе OFDM, и SSS передается в предпоследнем символе OFDM первого слота подкадра. Символы CRS передаются в каждом подкадре и по всей полосе согласно одному из стандартизованных частотно-временных шаблонов. Разные соты могут использовать 6 разных сдвигов по частоте, и существует 504 разных сигналов. При наличии двух передающих (TX) антенн, эффективное повторное использование для CRS равно трем.
Как следует из вышесказанного, сигналы синхронизации и CRS передаются сравнительно часто, тогда как PSS и SSS передаются менее часто, чем CRS. Это позволяет достаточно свободно устанавливать конкретную временную привязку измерительных зазоров с тем, чтобы зазор мог охватывать достаточно символов с сигналами, представляющими интерес, т.е. PSS/SSS и/или CRS. При наличии измерительного зазора 6 мс, возможны, самое большее, два символа SSS и два символа PSS с очень точной временной привязкой, тогда как захват одного символа SSS и одного символа PSS возможен почти без какого-либо ограничения временной привязки применительно к измерительным зазорам, поскольку минимальное необходимое эффективное время измерения составляет, в среднем, 5 мс.
В системе OTDOA LTE, сеть, т.е. eNodeB, может сигнализировать список сот, действующих на максимум трех частотных слоях, включающих в себя частоту обслуживающей соты. Требования 3GPP RAN4 для межчастотных измерений RSTD заданы для двух частотных слоев, включающих в себя частоту обслуживающей соты. Кроме того, измерительные зазоры должны быть заданы таким образом, чтобы они не перекрывались с событиями PRS слоя обслуживающей соты, что в противном случае привело бы к увеличению эффективного времени измерения, как для обслуживающей, так и для межчастотной соты. Поскольку измерительные зазоры, сконфигурированные для UE, используются для измерений RSTD, а также для измерений мобильности, было установлено соглашение о том, что заранее заданный “шаблон зазоров #0”, который задает сравнительно плотные и частые измерительные зазоры, можно использовать только, когда сконфигурированы межчастотные измерения RSTD. Согласно заранее заданному шаблону зазоров #0, измерительный зазор длительностью 6 мс возникает каждые 40 мс.
Как упомянуто выше, измерительные зазоры, подлежащие применению на UE, конфигурируются eNodeB по RRC. Однако именно сервер позиционирования, например E-SMLC, осведомлен о том, будет ли UE и когда проводить межчастотные измерения позиционирования, например, межчастотного RSTD или межчастотного E-CID, и эта информация прозрачно передается на UE через eNodeB. Таким образом, на всякий случай, eNodeB может всегда конфигурировать UE для наихудшего сценария, т.е. для измерительного зазора 40 мс согласно шаблону зазоров #0, даже когда UE производят измерения только на внутричастотных сотах. Это ограничение, налагаемое на сеть, существенно в том отношении, что оно сокращает объем радиоресурсов, доступный для внутричастотных измерений, и делает процедуру измерения неэффективной.
Раскрытие изобретения
Задачей настоящего изобретения является обеспечение усовершенствованных способов и устройств для поддержки конфигурации шаблона измерительных зазоров для пользовательского оборудования, которому измерительные зазоры требуются для осуществления межчастотного измерения для позиционирования.
Поставленная задача решается посредством способов и устройств согласно независимым пунктам формулы изобретения.
Первый вариант осуществления предусматривает способ, осуществляемый в узле радиосети системы беспроводной связи и предназначенный для поддержки конфигурации шаблона измерительных зазоров для пользовательского оборудования, которому измерительные зазоры требуются для осуществления межчастотного измерения для позиционирования. Способ содержит прием, от пользовательского оборудования, указания, что пользовательское оборудование готовится к осуществлению межчастотного измерения для позиционирования, и что для межчастотного измерения требуются измерительные зазоры.
Второй вариант осуществления предусматривает узел радиосети системы беспроводной связи. Узел радиосети сконфигурирован для взаимодействия посредством сигнализации с пользовательским оборудованием, которому требуется конфигурация шаблона измерительных зазоров для осуществления межчастотного измерения для позиционирования. Узел радиосети содержит приемник, сконфигурированный для приема, от пользовательского оборудования, указания, что пользовательское оборудование готовится к осуществлению межчастотного измерения для позиционирования, и что для межчастотного измерения требуются измерительные зазоры.
Третий вариант осуществления предусматривает способ, осуществляемый на пользовательском оборудовании системы беспроводной связи и предназначенный для поддержки конфигурации шаблона измерительных зазоров для межчастотного измерения для позиционирования осуществляемого пользовательским оборудованием. Способ содержит прием указания, что пользовательскому оборудованию необходимо начать межчастотное измерение для позиционирования, для которого пользовательскому оборудованию требуются измерительные зазоры. Способ также содержит передачу, на узел радиосети, указания, что пользовательское оборудование готовится к осуществлению межчастотного измерения для позиционирования, и что для межчастотного измерения требуются измерительные зазоры.
Четвертый вариант осуществления предусматривает пользовательское оборудование для использования в системе беспроводной связи. Пользовательское оборудование сконфигурировано для взаимодействия посредством сигнализации с узлом радиосети. Пользовательское оборудование содержит приемник, сконфигурированный для приема указания, что пользовательскому оборудованию необходимо начать межчастотное измерение для позиционирования, для которого пользовательскому оборудованию требуются измерительные зазоры. Пользовательское оборудование также содержит передатчик, сконфигурированный для передачи, на узел радиосети, указания, что пользовательское оборудование готовится к осуществлению межчастотного измерения для позиционирования, и что UE требуются измерительные зазоры для межчастотного измерения.
Преимущество некоторых из описанных здесь вариантов осуществления состоит в том, что, благодаря информированию узла радиосети о том, что UE готовится к осуществлению межчастотного измерения для позиционирования, для которого UE требуются измерительные зазоры, узел радиосети получает возможность конфигурировать надлежащий шаблон измерительных зазоров для UE. Если узлу радиосети не известно, когда UE намеревается осуществлять межчастотные измерения для позиционирования, для которых UE требуются измерительные зазоры, узлу радиосети может требоваться всегда конфигурировать UE в соответствии с шаблоном измерительных зазоров для осуществления межчастотных измерений для позиционирования, даже когда UE производят измерения только на внутричастотных сотах. Это ограничение, налагаемое на сеть, существенно в том отношении, что оно сокращает объем радиоресурсов, доступный для внутричастотных измерений, и приводит к неэффективному измерению процедуры.
Дополнительные преимущества и признаки вариантов осуществления настоящего изобретения явствуют из нижеследующего подробного описания, приведенного совместно с чертежами.
Краткое описание чертежей
Фиг. 1 - упрощенная блок-схема системы сотовой связи, в которой можно реализовать описанные здесь варианты осуществления.
Фиг. 1a - упрощенная блок-схема системы беспроводной связи, включающей в себя сервер позиционирования, в которой можно реализовать описанные здесь варианты осуществления.
Фиг. 2 - упрощенная блок-схема, демонстрирующая систему LTE с функциональными возможностями позиционирования.
Фиг. 3 - упрощенная блок-схема, демонстрирующая позиционирование пользовательского оборудования (UE) путем определения точки пересечения гипербол, соответствующих измеренным значениям разницы по времени относительно опорного сигнала (RSTD).
Фиг. 4 - упрощенная блок-схема, демонстрирующая шаблон измерительных зазоров.
Фиг. 5 - упрощенная блок-схема, демонстрирующая шаблон опорного сигнала позиционирования, когда для физического широковещательного канала (PBCH) используется одна или две антенны.
Фиг. 6 - блок-схема операций, демонстрирующая примерный вариант осуществления способа, осуществляемого в узле радиосети для поддержки конфигурации шаблона измерительных зазоров для UE, которому требуются измерительные зазоры для осуществления межчастотного измерения.
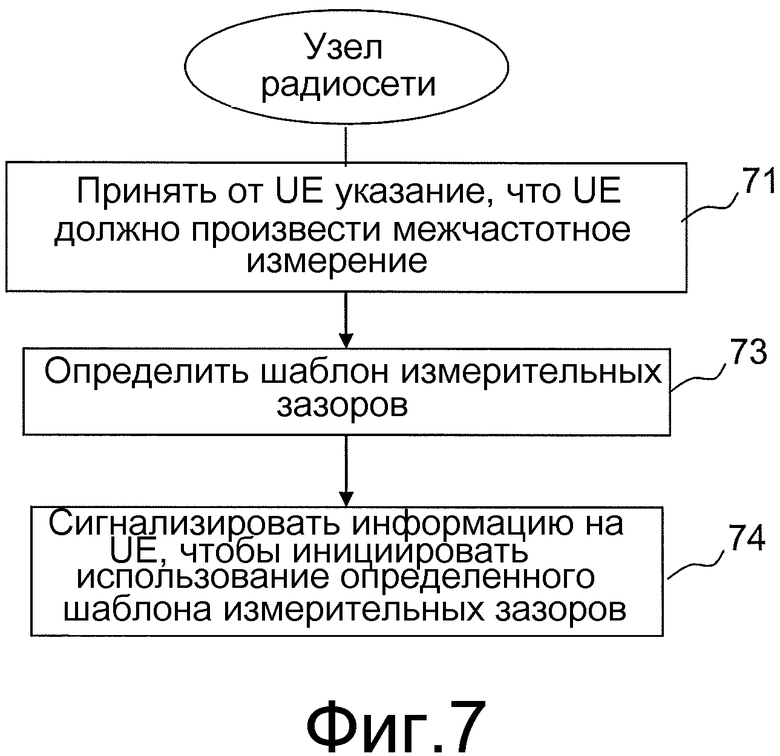
Фиг. 7 - блок-схема операций, демонстрирующая альтернативный примерный вариант осуществления способа, осуществляемого в узле радиосети для поддержки конфигурации шаблона измерительных зазоров для UE, которому требуются измерительные зазоры для осуществления межчастотного измерения.
Фиг. 8 - блок-схема операций, демонстрирующая примерный вариант осуществления способа, осуществляемого на UE, для поддержки конфигурации шаблона измерительных зазоров для UE для осуществления межчастотного измерения.
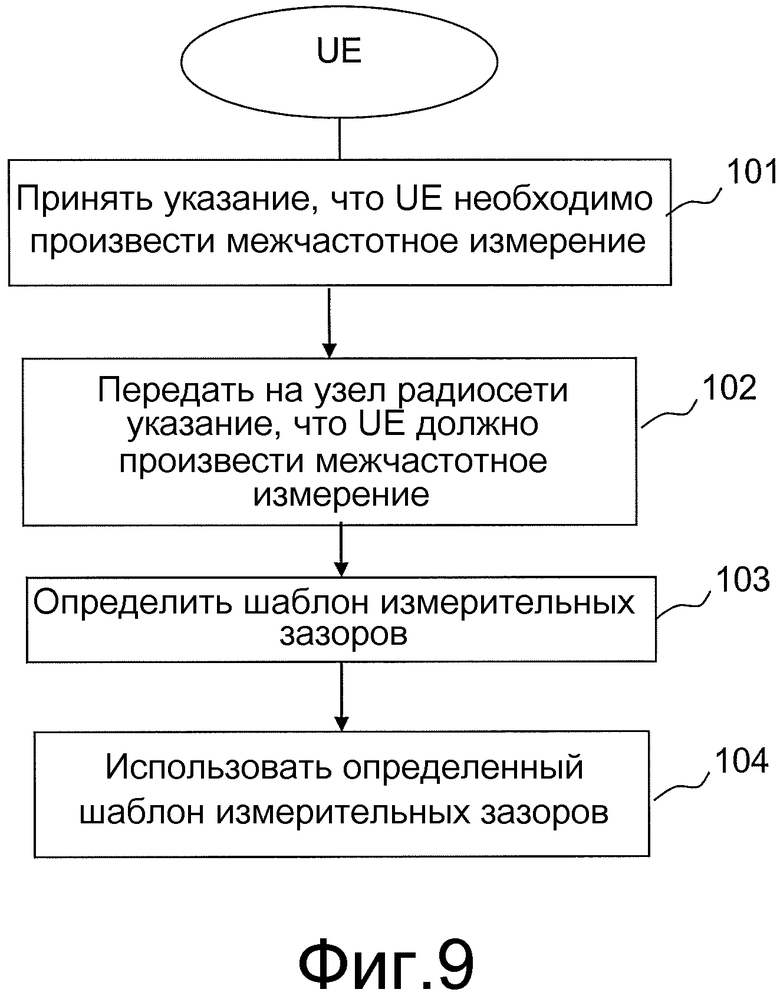
Фиг. 9 - блок-схема операций, демонстрирующая альтернативный примерный вариант осуществления способа, осуществляемого на UE, для поддержки конфигурации шаблона измерительных зазоров для UE для осуществления межчастотного измерения.
Фиг. 10 - блок-схема операций, демонстрирующая другой альтернативный примерный вариант осуществления способа, осуществляемого на UE, для поддержки конфигурации шаблона измерительных зазоров для UE для осуществления межчастотного измерения.
Фиг. 11 - упрощенная блок-схема, демонстрирующая примерные варианты осуществления UE и узла радиосети.
Осуществление изобретения
Термин “UE” используется на протяжении этого описания как неограничительный термин, означающий любое беспроводное устройство или узел, например, КПК, портативный компьютер, мобильное устройство, датчик, стационарный ретранслятор, мобильный ретранслятор или даже небольшую базовую станцию, позиционирование которых осуществляется на основании измерений с временной привязкой для позиционирования, т.е., в целом, цель LCS. UE также может представлять собой усовершенствованное UE, обладающее такими передовыми признаками, как агрегация несущих, но которому все еще могут требоваться измерительные зазоры для осуществления измерений на, по меньшей мере, некоторых сотах и, по меньшей мере, некоторой несущей частоте.
Сота связана с узлом радиосети, где узел радиосети содержит в широком смысле любой узел, способный передавать и/или принимать радиосигналы, которые можно использовать для позиционирования и/или измерений, например, eNodeB, базовую станцию макро/микро/пико-масштаба, домашний eNodeB, ретранслятор, устройство-маяк или повторитель. Узел радиосети может представлять собой базовую станцию радиосвязи на основе одной RAT, нескольких RAT или нескольких стандартов. Заметим, что передачи нисходящей линии связи и восходящей линии связи не обязательно осуществляются между UE и одним и тем же узлом радиосети.
Сервер позиционирования, описанный в различных вариантах осуществления, представляет собой узел с функциональными возможностями позиционирования. Например, для LTE его можно понимать как платформа позиционирование в плоскости пользователя, например, SLP в LTE, или сервер позиционирования в плоскости управления, например, E-SMLC в LTE. SLP также может состоять из SLC и SPC, как объяснено выше, где SPC также может иметь собственный интерфейс с E-SMLC. В условиях испытания, по меньшей мере, сервер позиционирования может имитироваться или эмулироваться испытательным оборудованием.
Сигнализация, описанная в различных вариантах осуществления, осуществляется либо через прямые линии связи, либо через логические линии связи, например, согласно протоколам более высокого уровня, например RRC, и/или через один или более узлов сети. Например, в LTE, в случае сигнализации между E-SMLC и клиентом LCS, результат позиционирования может переноситься через множественные узлы, по меньшей мере, через MME и Gateway Mobile Location Centre GMLC.
Термин “указание измерительного зазора” будет использоваться в данном описании в отношении сообщения, которое указывает необходимость в измерительных зазорах для UE. Указание измерительного зазора также может содержать дополнительную информацию, например, информацию, указывающую частоту, к которой относится измерение. Конкретные указания измерительного зазора могут использоваться для конкретного способа позиционирования, например OTDOA.
По меньшей мере, в некоторых вариантах осуществления, межчастотные измерения в настоящем изобретении следует понимать в широком смысле, охватывающем, например, межчастотные, межполосные измерения, или измерения между разными RAT. Некоторые неограничительные примеры межчастотных измерений позиционирования представляют собой межчастотные измерения E-CID, например, разница по времени приема и передачи на UE, RSRP и RSRQ, и межчастотные измерения RSTD для позиционирования методом OTDOA.
По меньшей мере, некоторые описанные здесь варианты осуществления не ограничиваются системой LTE, но применимы к любой RAN, с одной или несколькими RAT. Некоторые другие примеры RAT представляют собой LTE-Advanced, UMTS, GSM, cdma2000, WiMAX, и WiFi.
Согласно современным стандартам 3GPP, eNodeB может использовать следующие три разные заранее заданные конфигурации измерительных зазоров для UE для осуществления межчастотных измерений и измерений между разными RAT. Межчастотное измерение подразумевает измерение несущей частоты, которая отличается обслуживающей несущей частоты. Обслуживающая несущая частота и межчастотная несущая могут принадлежать режиму дуплексной связи с частотным разделением (FDD) или режиму дуплексной связи с временным разделением (TDD) или любой их комбинации.
Согласно первой заранее заданной конфигурации измерительных зазоров, не сконфигурировано ни одного измерительного зазора. В этом случае, UE способен осуществлять межчастотные измерения и/или измерения между разными RAT без измерительных зазоров. Это может быть, например, в случае, когда UE имеет множественные приемники, которые могут активироваться параллельно. Примером является UE, способное работать на множественных несущих, т.е. UE, способное принимать данные более чем на одной несущей.
Согласно второй заранее заданной конфигурации измерения, конфигурируется шаблон измерительных зазоров #0 (также именуемый шаблоном зазоров 0). Когда UE конфигурируется с шаблоном зазоров #0 для осуществления измерений позиционирования, не происходит снижения производительности межчастотных/между разными RAT измерений соседней соты и измерений позиционирования UE. Дело в том, что согласно этому шаблону, зазоры являются достаточно плотными и частыми, т.е. зазор шириной 6 мс возникает каждые 40 мс. Это означает, что должны выполняться требования к измерению мобильности и позиционирования, например, OTDOA или E-CID, заданные в стандарте.
Согласно третьей заранее заданной конфигурации измерения, конфигурируется шаблон измерительных зазоров #1 (также именуемый шаблоном зазоров 1). Согласно шаблону зазоров #1, зазор шириной 6 мс возникает каждые 80 мс. При использовании этого шаблона существует опасность снижения производительности межчастотных/между разными RAT измерений соседней соты и измерений позиционирования UE. Причина заключается в более длинной периодичности возникновения измерительных зазоров по сравнению с шаблоном зазоров #0. Следствием этого может быть, например, значительно более долгий период измерения для одного или более из вышеупомянутых измерений для выполнения соответствующих требований к точности цели.
Следует также заметить, что конфигурация межчастотного измерения включает в себя не только шаблон зазоров, но также, например, смещение зазора в подкадре и может включать в себя другие параметры, например, смещение SFN, смещение в кадре и т.д.
Для обеспечения желаемой производительности желательно, чтобы на UE конфигурировалась надлежащая конфигурация измерительных зазоров, когда измерения позиционирования, например, измерение в режиме OTDOA, например RSTD, подлежат осуществлению на UE на протяжении измерительных зазоров. Согласно вышеприведенному примеру E-UTRA, шаблон измерительных зазоров #0 должен конфигурироваться, когда от UE требуется осуществлять межчастотное измерение RSTD для позиционирования. Кроме того, для обеспечения желаемой производительности также желательно устанавливать такую конфигурацию измерительных зазоров, чтобы достаточное количество опорных сигналов, которые используются для измерений позиционирования в измерительных зазорах, попадало в измерительные зазоры. В E-UTRAN примерами опорного сигнала являются опорные сигналы позиционирования (PRS).
Чтобы решить задачу конфигурирования надлежащего шаблона измерительных зазоров, можно обеспечить извещение узла радиосети, который конфигурирует измерительные зазоры, о том, что UE потребовалось осуществить одно или более измерений, связанных с позиционированием, для чего необходимы измерительные зазоры, и о временной привязке возникновения опорных сигналов, используемых для измерений позиционирования в зазорах.
Примерами информации, которую можно использовать для указания временной привязки возникновения опорных сигналов, являются смещение временной привязки, например смещение SFN, смещение в кадре, смещение в подкадре или, в частности смещение, зазора в подкадре, описанное выше.
Следовательно, варианты осуществления, описанные более подробно ниже, снабжают узел радиосети необходимой информацией, относящейся к измерениям позиционирования, которые необходимо проводить на протяжении измерительных зазоров, чтобы узел радиосети мог конфигурировать надлежащий шаблон измерительных зазоров для осуществления измерений позиционирования.
В случае, когда зазоры для измерений позиционирования конфигурируются на eNodeB, чтобы eNodeB конфигурировал надлежащие измерительные зазоры, информация, связанная с измерениями для UE, должна поступать на eNodeB или становиться доступной для него.
Как упомянуто выше, на Фиг. 1a показана архитектура позиционирования. Согласно Фиг. 1a, существует интерфейс 163, например X2, между двумя eNodeB 110a и 110b и интерфейс 164 между eNodeB и блоком 141 администрирования сети и/или эксплуатации и обслуживания (O&M). В данном случае предполагается, что узлом позиционирования или сервером 140 позиционирования является сервер E-SMLC в E-UTRAN. Протокол обмена сообщениями между E-SMLC 140 и eNodeB 110a называется LPPa. Протокол радиоинтерфейса между E-SMLC 140 и UE 150a, 150b называется LPP. Заметим, что линия связи между разными субъектами сети может быть физической или логической линией связи. Путем для протоколов более высокого уровня является логическая линия связи, которая может содержать одну или несколько физических линий связи.
Исходя из архитектуры, например, показанной на Фиг. 1a, опишем примерные варианты осуществления. Эти примерные варианты осуществления предусматривают конфигурацию зазора на основании явного указания со стороны сервера позиционирования или UE, неявного указания посредством данных содействия, согласно которому сервер позиционирования или UE пересылает данные содействия на eNodeB, пассивного контроля пакетов, заранее заданных правил и автономного обнаружения. Решения согласно всем описанным здесь вариантам осуществления применимы, когда UE находится в состоянии непрерывного приема (DRX) или в состоянии DRX. Варианты осуществления более подробно описаны ниже.
Согласно варианту осуществления, который предусматривает явное указание со стороны сервера позиционирования, узел радиосети, например, eNodeB в E-UTRAN, изменяет или конфигурирует конфигурацию(и) зазора для конкретного UE, где конфигурация основана на доступной информации, касающейся измерений позиционирования, например, межчастотных измерений RSTD в режиме OTDOA или межчастотных измерений E-CID в E-UTRAN. Информация может зависеть от соты или зависеть от группы UE или конкретного UE, и она поступает на eNodeB с сервера позиционирования, по запросу или без него, например, в порядке периодического или инициированного событием обновление. Прием такой информации также можно использовать для инициирования изменения существующей конфигурации зазора в случае, если существующий сконфигурированный шаблон зазоров непригоден для измерений позиционирования, подлежащих осуществлению.
Согласно примерному варианту осуществления, сервер позиционирования, например E-SMLC, отправляет индикатор переключения конфигурации зазора, зависящий от соты или зависящий от UE, на eNodeB. Индикатор переключения конфигурации зазора предписывает eNodeB использовать надлежащую конфигурацию зазора для указанных UE, группы UE или всех UE, проводящих межчастотные измерения в соте. Индикатор переключения конфигурации зазора может, например, быть равен '1', когда межчастотные измерения должны использоваться указанными UE, группой UE или всеми UE, проводящими межчастотные измерения в соте. В случае, когда eNodeB уже использует для конкретного UE шаблон зазоров, который непригоден для измерения позиционирования, подлежащего осуществлению (например, если шаблон предположительно снижает производительность), то eNodeB переключается с существующего шаблона зазоров для этого UE на более подходящий. Надлежащий шаблон зазоров либо заранее задается, либо явно указывается сервером позиционирования. Сервер позиционирования также предоставляет информацию, связанную с несущей частотой, на которой измерения позиционирования, например, RSTD, подлежат осуществлению на UE в измерительных зазорах. Другая информация, например, являются ли соты на несущей частоте асинхронными или синхронными, или информация временной привязки опорных сигналов и т.д., также может предоставляться сервером позиционирования eNodeB, который может использовать ее для определения наиболее подходящего шаблона зазоров для измерений.
eNodeB может в необязательном порядке отправлять сообщение квитирования (ACK) на E-SMCL для подтверждения приема индикатора, отправленного E-SMLC на eNodeB. Таким образом, E-SMLC принимает ACK, если оно используется.
Дополнительно, согласно примерному варианту осуществления, eNodeB отправляет информацию переконфигурирования зазоров, например, детали, касающиеся шаблона зазоров, смещения зазора в подкадре, смещения в кадре, смещения SFN и т.д., на UE посредством широковещательного/многоадресного или одноадресного или зависящего от UE сообщения, например, посредством сигнализации RRC, где конфигурация зазора содержит всю необходимую и стандартизованную информацию, которая требуется для UE для конфигурирования измерительных зазоров. eNodeB также может сохранять конфигурацию зазора для каждого UE. Информация, сигнализируемая на UE, может содержать, по меньшей мере, время или точку отсчета, откуда надлежит применять конфигурацию зазора, и/или конфигурацию измерительных зазоров как таковую.
Согласно разновидности варианта осуществления явного указания для eNodeB, eNodeB принимает информацию, необходимую для переконфигурирования зазора, от узла 141 администрирования сети (NM) и O&M, а не от сервера 140 позиционирования. В этом случае, информация, поступающая от узла позиционирования 140, также передается на узел 141 NM и O&M.
Согласно дополнительной разновидности варианта осуществления явного указания для eNodeB, eNodeB принимает информацию, необходимую для надлежащего конфигурирования или переконфигурирования измерительных зазоров, от UE. UE узнает о том, что оно готовится к осуществлению межчастотного измерения для позиционирования, когда сервер позиционирования запрашивает такие измерения от UE. Соответственно UE может сигнализировать явное указание для указания узлу радиосети, что ему требуются измерительные зазоры.
Согласно варианту осуществления, который предусматривает неявное указание, данные содействия пересылаются на eNodeB для информирования eNodeB о том, что UE будет производить измерение, для чего требуется конфигурировать измерительные зазоры. Согласно одной альтернативе, сервер 140 позиционирования сигнализирует данные содействия или определенные элементы данных содействия для каждого UE или группы UE на узел радиосети. В примере E-UTRAN, представленном на Фиг. 1a, это означает, что E-SMLC 140 сигнализирует данные содействия или их часть на eNodeB 110a или 110b согласно протоколу LPPa. eNodeB 110a/b также может отправлять сообщение квитирования на E-SMLC таким же образом, как объяснено выше для примерного варианта осуществления с явным указанием. Элементы данных содействия, которые сигнализируются на eNodeB, будут, согласно примерному варианту осуществления, содержать, по меньшей мере, информацию, связанную с несущими частотами сот, которые должны использоваться для измерений позиционирования. Узлу радиосети (т.е. eNodeB в этом примере) известна обслуживающая несущая частота f1 для UE. В случае, когда данные содействия, принятые узлом радиосети, содержат более одной несущей частоты, например, f1 и f2, или если они содержат одну или более несущих частот f2, которые отличаются от обслуживающей несущей частоты, то узел радиосети может использовать эту информацию для заключения о том, что от UE требуется производить межчастотные измерения для позиционирования, например межчастотные измерения RSTD. Эти измерения UE осуществляет в измерительных зазорах. Следовательно, eNodeB может использовать эту информацию для конфигурирования измерительных зазоров, которые имеют отношение к измерениям позиционирования, подлежащим осуществлению в измерительных зазорах. В E-UTRAN, это означает, что eNodeB может использовать принятые данные содействия или их часть и, например, конфигурировать шаблон зазоров 0 или преобразовывать существующий шаблон зазоров 1 в шаблон зазоров 0 для всех измерений, подлежащих осуществлению в измерительных зазорах. Конфигурирование или преобразование измерительных зазоров можно производить таким же образом, как объяснено выше. Соответственно, узел радиосети может сигнализировать информацию на UE для инициирования использования надлежащего шаблона зазоров на UE. Информация, сигнализируемая на UE, может, например, содержать определенный шаблон измерительных зазоров, указание или ссылку на заранее заданный шаблон измерительных зазоров, и/или время или точку отсчета, откуда следует применять шаблон измерения, подлежащий конфигурированию.
Данные содействия отправляются с сервера 140 позиционирования на UE 150a или 150b, чтобы UE было легче осуществлять измерения позиционирования, например, RSTD в случае OTDOA, или измерения интенсивности/качества сигнал для расширенного ID соты и т.д. Например, в E-UTRAN, данные содействия отправляются на UE согласно протоколу LPP и заданы в разделе 6.5.1.2 в 3GPP TS 36.355 V 9.1.0 (2010-03), Evolved Universal Terrestrial радиодоступ (E-UTRA); LTE Positioning Protocol (LPP) (выпуск 9). Поскольку протокол LPP установлен между UE и E-SMLC, eNodeB не принимает данные содействия, когда они передаются с E-SMLC на UE. Как объяснено выше, идея вышеописанного варианта осуществления состоит в том, что данные содействия или часть данных содействия, которые отправляются на UE, также пересылаются узлом позиционирования на узел радиосети, например, eNodeB. Согласно разновидности этого варианта осуществления, UE пересылает на узел радиосети данные содействия или часть данных содействия. Согласно примеру, элементы данных, отправляемые на eNodeB, зависят от UE, отправляются по LPPa и являются элементами данных информационного элемента OTDOA-NeighbourCellInfoList, заданного в вышеупомянутом разделе 6.5.1.2 в 3GPP TS 36.355 следующим образом:

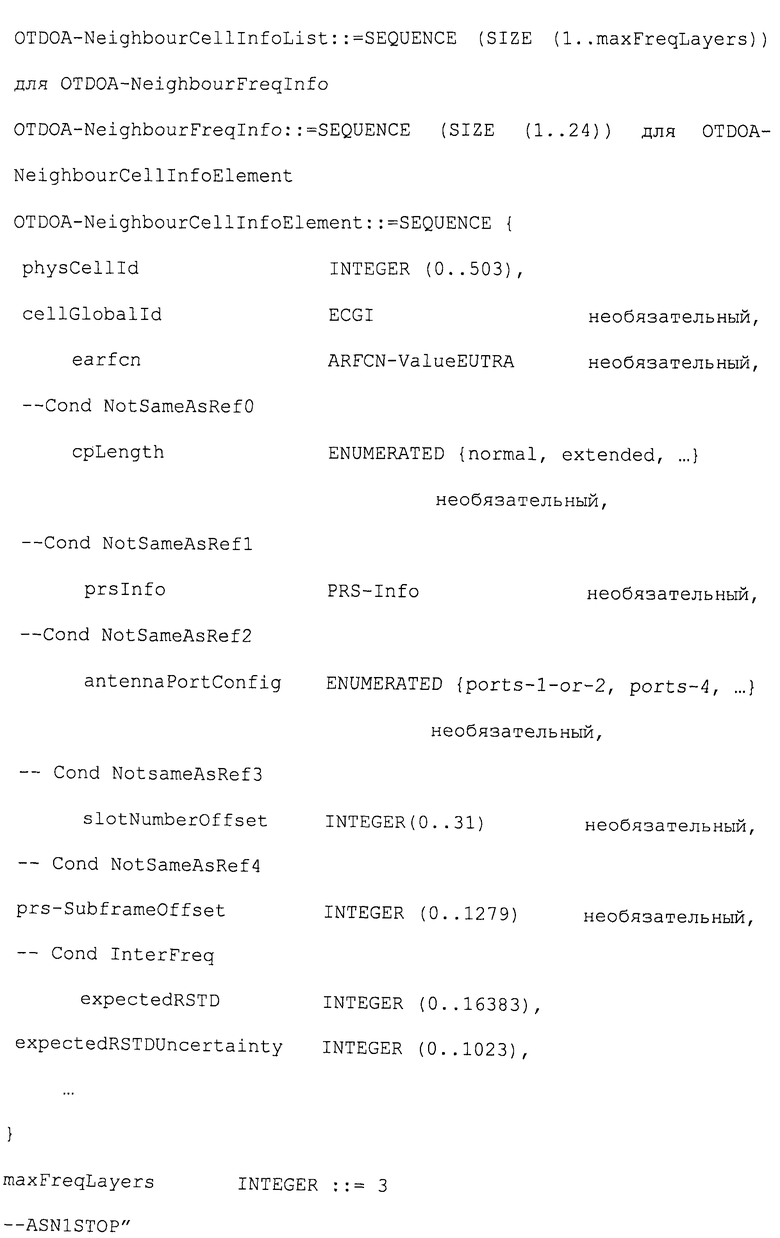 Из вышеприведенного текста следует, что информационный элемент содержит информацию несущей частоты, поскольку “earfcn” это частотный канал рассматриваемой сота. eNodeB может использовать эту информацию, например, если существует, по меньшей мере, несущая, которая отличается от обслуживающей несущей, для определения, ли требуется UE осуществлять измерения позиционирования, например, измерения RSTD, в измерительных зазорах, или нет. Соответственно, eNodeB может гарантировать, что соответствующие измерительные зазоры сконфигурированы для облегчения измерений в зазорах, например, межчастотных измерений RSTD и т.д. Аналогично, данные содействия или их часть, например, информация несущей частоты, связанная со способами позиционирования, отличными от OTDOA, например, на основе расширенного ID соты, также может сигнализироваться на eNodeB сервером позиционирования или UE.
Из вышеприведенного текста следует, что информационный элемент содержит информацию несущей частоты, поскольку “earfcn” это частотный канал рассматриваемой сота. eNodeB может использовать эту информацию, например, если существует, по меньшей мере, несущая, которая отличается от обслуживающей несущей, для определения, ли требуется UE осуществлять измерения позиционирования, например, измерения RSTD, в измерительных зазорах, или нет. Соответственно, eNodeB может гарантировать, что соответствующие измерительные зазоры сконфигурированы для облегчения измерений в зазорах, например, межчастотных измерений RSTD и т.д. Аналогично, данные содействия или их часть, например, информация несущей частоты, связанная со способами позиционирования, отличными от OTDOA, например, на основе расширенного ID соты, также может сигнализироваться на eNodeB сервером позиционирования или UE.
Альтернативный примерный вариант осуществления, который теперь будет объяснен, предусматривает пассивный контроль пакетов. Этот вариант осуществления полезен в случае eNodeB не имеет явной или неявной информации об измерениях позиционирования, которые должно производить UE на протяжении измерительных зазоров. Следовательно, все действия, включающие в себя определение, осуществляет ли конкретное UE межчастотные измерения, осуществляются eNodeB или узлом радиосети, который конфигурирует измерительные зазоры. Если узлом радиосети, который конфигурирует измерительные зазоры, является eNodeB, eNodeB может пассивно контролировать пакеты с помощью LPP или аналогичных сообщений, отправляемых на UE сервером позиционирования. Пассивно проконтролированные сообщения могут содержать информацию содействия, подлежащую использованию UE для осуществления измерений позиционирования, например, межчастотной несущей и т.д. Сообщения, содержащие информацию содействия, прозрачно проходят через eNodeB. Следовательно, eNodeB может пассивно контролировать эти сообщения. Информация содействия, получаемая пассивным контролем, позволяет eNodeB принимать решение, конфигурировать шаблон измерительных зазоров для осуществления межчастотных измерений позиционирования, или нет. Шаблон измерительных зазоров может, например, представлять собой шаблон зазоров, заранее заданный для измерений позиционирования, например, шаблон зазоров #0. Например, если eNodeB определяет, путем пассивного контроля информации содействия, что в данных содействия существует, по меньшей мере, две соты, действующие на разных частотах, например, сота 1 и сота 2, действующие на частотах f1 и f2 соответственно, то eNodeB может предположить, что для измерений позиционирования необходимы измерительные зазоры. Кроме того, eNodeB известна обслуживающая несущая частота f1, следовательно, eNodeB может предположить, что f2 является межчастотной. Следовательно, eNodeB будет конфигурировать шаблон измерительных зазоров или регулировать существующий шаблон измерительных зазоров в случае, когда шаблон измерительных зазоров уже применяется, чтобы гарантировать, что достаточное количество опорных сигналов на несущей f2 попадает в измерительные зазоры сконфигурированного или отрегулированного шаблона измерительных зазоров. Опорный сигнал может, например, представлять собой PRS на f2, и шаблон измерительных зазоров можно, например, конфигурировать или регулировать таким образом, чтобы, по меньшей мере, один подкадр, содержащий опорный сигнал, попадал в измерительные зазоры. Конфигурирование шаблонов измерительных зазоров на UE может осуществляться таким же образом, как описано выше, независимо от того, узнал ли узел радиосети о потребности UE в измерительных зазорах для осуществления межчастотного измерения для позиционирования, посредством пассивного контроля или посредством другого способа, например, явного или неявного указания с сервера позиционирования или UE.
Другой альтернативный вариант осуществления предусматривает заранее заданное правило на UE. Когда UE принимает данные содействия, например, через LPP, и UE намеревается проводить межчастотные измерения другой тип измерений в измерительных зазорах для несущей f1 и несущей f2, то UE самостоятельно переконфигурирует измерительные зазоры, наиболее подходящие для измерений, подлежащих осуществлению. Несущие f1 и f2 можно задать в вышеупомянутом поле 'earfcn' данных содействия. Измерительный зазор, подлежащий конфигурированию или переконфигурированию, может быть заранее задан в стандарте. Соответственно, UE может самостоятельно конфигурировать измерительные зазоры, следуя одному или нескольким заранее заданным правилам. Например, можно использовать следующий заранее заданный набор правил:
Если существует f2≠f1
если (current_status==no_gaps)
заменить на: конфигурация зазора #0,
если (current_status==gap_configuration #1)
-> заменить на: конфигурация зазора #0,
Иначе, ничего не менять.
Вышеприведенный примерный заранее заданный набор правил означает, что UE меняет текущую конфигурацию зазора на заранее заданную конфигурацию шаблона зазоров, которая пригодна для осуществления измерений позиционирования в измерительных зазорах, например, межчастотных измерений.
Согласно разновидности этого варианта осуществления, если используется решение заранее заданных правил для UE, UE может указывать eNodeB, что "позиционирование продолжается", и что ему нужен шаблон зазоров 0. Когда позиционирование больше не нужно, UE может снова обновить eNodeB. Эта информация "позиционирование продолжается" может также переноситься по интерфейс X2, например, на узел, связанный с новой обслуживающей сотой UE, когда UE осуществляет хэндовер, или на соседний узел для указания шаблона измерительных зазоров для измерений позиционирования, используемого в этой соте.
Еще один примерный вариант осуществления предусматривает автономное обнаружение в узле сети. В случае, когда RS или PRS, которые UE использует для осуществления измерений позиционирования, сконфигурированы на более чем одной несущей частоте в eNodeB, eNodeB может быть сконфигурирован так, чтобы всегда использовать наиболее подходящий шаблон зазоров, необходимый для осуществления измерений позиционирования, например, eNodeB конфигурирует только шаблон зазоров 0 для всех измерений в E-UTRAN. eNodeB предполагает, что измерения на, по меньшей мере, одной из несущих частот производятся в зазорах. Во-вторых, измерительные зазоры сконфигурированы так, чтобы гарантировать, что возможно большее число подкадров PRS на разных несущих находится в измерительных зазорах. Этот вариант осуществления полезен в случае, когда eNodeB не располагает другими средствами для определения, производятся ли измерения позиционирования в измерительных зазорах для конкретного UE.
Дополнительный примерный вариант осуществления предусматривает использование интерфейса X2, в частности, для обмена информацией о сотах на частотах, используемых для позиционирования. В LTE eNodeB может обмениваться информацией по интерфейсу X2. Информация может представлять собой, например, список всех полос по всем несущим в соответствующих сотах. Согласно этому варианту осуществления, eNodeB, помимо информации о несущих также включают информацию о том, используется ли несущая для измерений позиционирования, например, используется ли частота f1 для передач PRS и/или конфигурирования подкадров позиционирования, или проводят ли UE измерения позиционирования на CRS. В другом варианте осуществления, обмен информацией о полосе передачи PRS также осуществляется по X2.
Еще один примерный вариант осуществления предусматривает применение принятой по умолчанию конфигурации измерительных зазоров. Примеры принятых по умолчанию конфигураций, которые могут применяться, таковы:
- В системе на основе нескольких RAT и/или нескольких частот, при совмещении зон, eNodeB может принимать решение использовать шаблон зазоров 0, когда разные соты зоны действуют на разных частотах/RAT.
- шаблон зазоров 0 всегда используется в качестве принятой по умолчанию конфигурации зазора на eNodeB, когда сеть предоставляет услуги позиционирования.
- шаблон зазоров 0 используется в качестве принятой по умолчанию конфигурации на eNodeB при передаче PRS.
- конфигурирование шаблона зазоров 0 инициируется запросом позиционирования.
- конфигурация зазора, например, шаблон зазоров, для eNodeB может определяться или конфигурироваться другим узлом, например, узлом 141 NM и/или O&M, узел самоорганизующейся сети (SON), макро-eNodeB и т.д.
eNodeB использует принятую по умолчанию конфигурацию зазора при конфигурировании UE для межчастотных измерений. В одном варианте осуществления, eNodeB переконфигурирует UE на новую принятую по умолчанию конфигурацию зазора в одном из вышеперечисленных случаев, и принятая по умолчанию конфигурация изменяется.
Вышеописанные варианты осуществления обеспечивают ряд преимуществ над предыдущими способами и устройством, в том числе, например, решение проблемы неполной поддержки межчастотных измерений.
Некоторые из вышеописанных вариантов осуществления предусматривают, что UE указывает узлу радиосети необходимость в измерительных зазорах. Такое указание может сигнализироваться на узел радиосети посредством сигнализации RRC. Преимущество отправки указания с UE, а не с сервера позиционирования, состоит в том, что этот вариант осуществления применим для позиционирования в плоскости пользователя, а также для позиционирования в плоскости управления. Нельзя быть уверенным в том, что сервер позиционирования знает, действительно ли UE требуются измерительные зазоры, поскольку сервер позиционирования может не располагать полной информацией о возможностях UE. Соответственно, преимущество того, что UE само указывает свою потребность в измерительных зазорах, состоит в снижении опасности конфигурирования измерительных зазоров в случаях, когда UE не требуются измерительные зазоры.
На Фиг. 6 показана блок-схема операций способа, осуществляемого в узле радиосети для поддержки конфигурации шаблона измерительных зазоров для UE, которому требуются измерительные зазоры для осуществления межчастотного измерения. Способ содержит прием, на этапе 71, от UE указания, что UE готовится к осуществлению межчастотного измерения для позиционирования, и что для межчастотного измерения требуются измерительные зазоры. Межчастотное измерение может, например, представлять собой измерение разницы по времени относительно опорного сигнала, RSTD. Принятое указание может включать в себя указание шаблона измерительных зазоров, в котором UE нуждается для осуществления межчастотного измерения. Такое указание может представлять собой указание необходимости в конфигурировании заранее заданного шаблона измерительных зазоров, например, шаблона зазоров #0, который задает зазор шириной 6 мс, который возникает каждые 40 мс.
На Фиг. 7 показана блок-схема операций, демонстрирующая альтернативный вариант осуществления в узле радиосети для поддержки конфигурации шаблона измерительных зазоров для UE, которому требуются измерительные зазоры для осуществления межчастотного измерения. Этап 71, на котором узел радиосети принимает, от пользовательского оборудования, указание, что UE готовится к осуществлению межчастотного измерения для позиционирования, и что для межчастотного измерения требуются измерительные зазоры, идентичен объясненному выше в связи с Фиг. 6. Способ, представленный на Фиг. 7, также содержит этап 73, на котором узел радиосети определяет, на основании принятого указания, шаблон измерительных зазоров для осуществления межчастотного измерения. Следующий этап 74 содержит сигнализацию на UE информации для инициирования использования определенного шаблона измерительных зазоров на UE. Информация, сигнализируемая на UE, может, например, включать в себя время или точку отсчета, откуда надлежит применять определенный шаблон зазоров, и/или определенный шаблон измерительных зазоров. Информация, сигнализируемая на UE, может, например, указывать смещение зазора и/или время активации шаблона, подлежащие применению.
Согласно дополнительным разновидностям вариантов осуществления, представленных на Фиг. 6 и Фиг. 7, узел радиосети может сохранять информацию об определенном шаблоне измерительных зазоров, связанном с UE. Таким образом, узел радиосети может сохранять информацию о разных шаблонах измерительных зазоров, сконфигурированных для разных UE. В другой разновидности, узел радиосети принимает от UE указание, что пользовательское оборудование готовится остановить межчастотное измерение. Таким образом, узел радиосети извещается о том, что UE больше не нуждается в шаблоне измерительных зазоров для осуществления межчастотного измерения.
На Фиг. 8 показана блок-схема операций способа, осуществляемого на UE, для поддержки конфигурации шаблона измерительных зазоров для межчастотного измерения, осуществляемого на UE. Способ содержит прием указания, что пользовательскому оборудованию необходимо начать межчастотное измерение для позиционирования, для которого пользовательскому оборудованию требуются измерительные зазоры, на этапе 101. Указание, что UE требуется начать межчастотное измерение, может поступать от сервера позиционирования, например, E-SMCL или SLP. На этапе 102, UE передает на узел радиосети указание, что UE готовится к осуществлению межчастотного измерения для позиционирования, и что для межчастотного измерения требуются измерительные зазоры. Если UE располагает возможностями для осуществления межчастотного измерения без измерительных зазоров, не следует указывать узлу радиосети, что ему требуются измерительные зазоры для осуществления межчастотного измерения. Указание, передаваемое на узел радиосети, может включать в себя указание шаблона измерительных зазоров, в котором нуждается пользовательское оборудование для осуществления межчастотного измерения. Согласно разновидности иллюстрируемого варианта осуществления, UE также передает на узел радиосети дополнительное указание, которое указывает, что пользовательское оборудование готовится остановить межчастотное измерение. Указание можно применять для одного или более заранее заданных способов позиционирования, например, OTDOA и/или E-CID.
Как описано выше, существуют варианты осуществления, в которых узел радиосети конфигурирует шаблон измерительных зазоров, подлежащий применению на UE, и другие варианты осуществления, в которых UE самостоятельно конфигурирует шаблон измерительных зазоров на основании заранее заданных правил на UE. На Фиг. 9 и 10 показаны блок-схемы операций, демонстрирующие варианты осуществления согласно этим разным альтернативам.
Фиг. 9 иллюстрирует способ, согласно которому UE самостоятельно конфигурирует шаблон измерительных зазоров, подлежащий использованию для межчастотных измерений позиционирования. Способ содержит этапы 101 и 102, идентичные описанным выше в связи с Фиг. 8. Кроме того, способ содержит этап 103, на котором UE определяет шаблон измерительных зазоров, подлежащий использованию для осуществления межчастотного измерения. Этап 103 инициируется в ответ на прием указания, что UE требуется осуществить межчастотное измерение. UE определяет шаблон измерительных зазоров на основании заранее заданного набора правил. На этапе 104 определенный шаблон измерительных зазоров конфигурируется на UE.
Фиг. 10 иллюстрирует способ, согласно которому UE принимает информацию об определенной конфигурации измерительных зазоров от узла радиосети. Способ содержит этапы 101 и 102, идентичные описанным выше в связи с Фиг. 8. Кроме того, способ содержит этап 105, на котором UE принимает от узла радиосети информацию, указывающую определенный шаблон измерительных зазоров, подлежащий использованию для осуществления межчастотного измерения. На этапе 106 UE использует определенный шаблон измерительных зазоров.
Разновидность способов, представленных на Фиг. 9 и 10, также включает в себя этап, на котором UE определяет на основании возможностей UE, что ему требуются измерительные зазоры для осуществления межчастотного измерения для позиционирования. Если UE способен осуществлять межчастотное измерение для позиционирования, UE, конечно, не нужно отправлять никакого указания на узел радиосети, что ему требуются измерительные зазоры для осуществления межчастотного измерения для позиционирования.
На Фиг. 11 показана упрощенная блок-схема, демонстрирующая примерные варианты осуществления узла 81 радиосети и UE 91, соответственно, которые могут быть выполнены с возможностью осуществления способов, представленных на фиг 6-10.
Узел 81 радиосети содержит приемник 82, процессор 83, передатчик 84 и, по меньшей мере, одну антенну 89 и память 88. Приемник 82 может быть сконфигурирован для приема указания 85, которое указывает, что UE готовится к осуществлению межчастотного измерения, для которого UE требуются измерительные зазоры. Процессор 83 может быть сконфигурирован для определения шаблона измерительных зазоров на основании указания 85, и передатчик 84 может быть сконфигурирован для передачи информации 86 на UE для инициирования использования определенного шаблона измерительных зазоров. В памяти 88 может храниться информация об определенных шаблонах измерительных зазоров для разных UE.
UE 91 содержит приемник 92, процессор 93, передатчик 94 и, по меньшей мере, одну антенну 95. Приемник 92 сконфигурирован для приема указания 87, например, от сервера позиционирования, которое указывает, что UE требуется осуществить межчастотное измерение. Передатчик 94 сконфигурирован для передачи указания 85 на узел 81 радиосети. Процессор 93 может быть сконфигурирован для определения шаблона измерительных зазоров, подлежащего применению, согласно набору заранее заданных правил.
Функциональные блоки, изображенные на Фиг. 11, можно комбинировать и переставлять различными эквивалентными способами, и многие функции могут осуществляться одним или более надлежащим образом запрограммированными цифровыми сигнальными процессорами и другими известными электронными схемами, например, дискретными логическими вентилями, взаимосвязанными для осуществления специализированной функции, или специализированными интегральными схемами. Кроме того, соединения между функциональными блоками, изображенными на Фиг. 11, и информацию, которую они предоставляют или которой они обмениваются, можно изменять различными способами, чтобы узел радиосети и UE, соответственно, могли реализовать вышеописанные способы и другие способы, определяющие порядок работы узла радиосети или UE в системе беспроводной связи.
Многие аспекты представленных здесь вариантов осуществления описаны в отношении последовательностей действий, которые могут осуществляться, например, элементами программируемой компьютерной системы. Варианты осуществления UE включают в себя, например, мобильные телефоны, пейджеры, телефонные трубки, портативные компьютеры и другие мобильные терминалы и пр. Кроме того, некоторые описанные здесь варианты осуществления можно дополнительно рассматривать как воплощенные целиком в любой форме машиночитаемого носителя данных, на котором хранится надлежащий набор инструкций для использования в системе, устройстве или приспособлении для выполнения инструкций или в связи с ними, например, в компьютеризированной системе, процессоросодержащей системе, или другой системе, способной считывать инструкции с носителя и выполнять инструкции. Используемый здесь термин "машиночитаемый носитель" может означать любое средство, которое может содержать, хранить или переносить программу для использования в системе, устройстве или приспособлении для выполнения инструкций или в связи с ними. Машиночитаемый носитель может представлять собой, например, но без ограничения, электронные, магнитные, оптические, электромагнитные, инфракрасные или полупроводниковые систему, устройство или приспособление. Более конкретные примеры (неполный список) машиночитаемых носителей включают в себя электрическое соединение, имеющее один или более проводов, портативную компьютерную дискету, оперативную память (ОЗУ), постоянную память (ПЗУ), стираемую программируемую постоянную память (СППЗУ или флэш-память) и оптическое волокно. Таким образом, существуют многочисленные различные варианты осуществления во многих разных формах, не все из которых описаны выше, которые отвечают объему нижеследующей формулы изобретения. Для каждого из различных аспектов, любую такую форму можно именовать "логикой, сконфигурированной для" осуществления описанного действия, или, альтернативно, "логикой, которая" осуществляет описанное действие.
Несколько вышеописанных вариантов осуществления использует сценарий LTE в качестве примерного сценария применения. Спецификации стандарта LTE можно рассматривать как развитие современных спецификаций широкополосного множественного доступа с кодовым разделением (WCDMA). Система LTE использует ортогональное мультиплексирование с частотным разделением (OFDM) в качестве метода множественного доступа (именуемый OFDMA) на нисходящей линии связи (DL) от узлов системы к экземплярам пользовательского оборудования (UE). Система LTE имеет канальные полосы в пределах от около 1.4 МГц до около 20 МГц, и поддерживает пропускную способность более 100 мегабит в секунду (Мбит/с) на наиболее широкополосных каналах. Один тип физического канала, заданный для нисходящей линии связи LTE, представляет собой физический совместно используемый канал нисходящей линии связи (PDSCH), который переносит информацию с более высоких уровней в стеке протоколов LTE, и в который отображаются один или более конкретных транспортных каналов. Информация управления переносится физическим каналом управления восходящей линии связи (PUCCH) и физическим каналом управления нисходящей линии связи (PDCCH). Каналы LTE описаны в Технической спецификации 3GPP (TS) 36.211 V9.1.0, Physical Channels and Modulation (выпуск 9) (дек. 2009), и в других спецификациях.
В системе связи IMT-Advanced используется мультимедийная подсистема интернет-протокола (IP) (IMS) для LTE, HSPA или другой системы связи для мультимедийной телефонии IMS (IMT). В усовершенствованной системе IMT (которую можно называть системой мобильной связи "четвертого поколения" (4G)), рассматриваются полосы шириной 100 МГц и более. 3GPP выдвигает спецификации LTE, HSPA, WCDMA и IMT и спецификации, стандартизирующие другие виды сотовых систем беспроводной связи.
В системе связи OFDMA, поток данных, подлежащий передаче, делится между несколькими узкополосными поднесущими, которые передаются параллельно. В целом, блок ресурсов, выделенный конкретному UE, представляет собой конкретное количество конкретных поднесущих, используемых в течение конкретного периода времени. Разные группы поднесущих можно использовать в разные моменты времени для разных пользователей. Поскольку каждая поднесущая является узкополосной, каждая несущая испытывает, в основном, равномерное замирание, что упрощает для UE задачу демодуляции каждой поднесущей. Системы связи OFDMA описаны в литературе, например, в публикации патентной заявки США № US 2008/0031368 A1, поданной B. Lindoff et al.
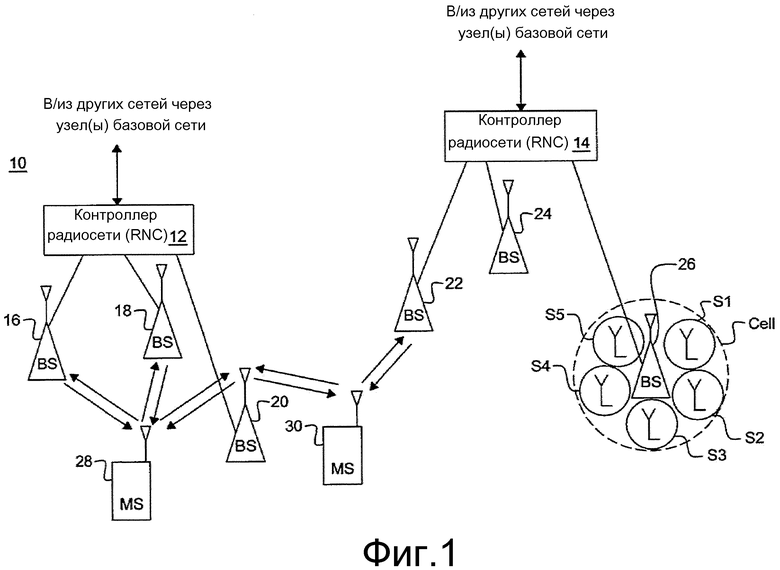
На Фиг. 1 показана типичная система 10 сотовой связи. Контроллеры 12, 14 радиосети (RNC) управляют различными функциями радиосети, включающими в себя, например, установление канала-носителя радиодоступа, хэндовер с разнесением и т.д. В целом, каждый RNC направляет вызовы на и от UE, например, мобильной станции (MS), мобильного телефона или другого удаленного терминала, через надлежащую(ие) базовую(ые) станцию(и) (BS), которые осуществляют связь друг с другом по каналам нисходящей (или прямой) и восходящей (или обратной) линии связи. Согласно Фиг. 1, RNC 12 подключен к BS 16, 18, 20, и RNC 14 подключен к BS 22, 24, 26. Каждая BS, или eNodeB, который является BS в системе LTE, обслуживает географическую область, которая делится на одну или более сот. Согласно Фиг. 1, BS 26 имеет пять антенных секторов S1-S5, про которые можно сказать, что они образуют соту BS 26, хотя сектор или другая область, обслуживаемая сигналами от BS, также можно называть сотой. Кроме того, BS может использовать более одной антенны для передачи сигналов на UE. BS обычно подключены к своим соответствующим RNC выделенными телефонными линиями, оптоволоконными линиями связи, микроволновыми линиями связи и т.д. RNC 12, 14 соединены с внешними сетями, например, коммутируемой телефонной сетью общего пользования (PSTN), интернетом и т.д. через один или более узлов базовой сети, например, коммутационный центр мобильной связи (не показан) и/или узел службы пакетной радиосвязи (не показан).
Следует понимать, что распределение функциональных возможностей, изображенное на Фиг. 1, можно модифицировать в LTE и других системах связи. Например, функциональные возможности RNC 12, 14 можно перенести на eNodeB 22, 24, 26, и другие функциональные возможности можно перенести на другие узлы в сети. Также следует понимать, что базовая станция может использовать множественные передающие антенны для передачи информации в соту/сектор/область, и эти разные передающие антенны могут передавать соответствующие, разные пилот-сигналы.
Использование множественных антенн играет важную роль в современных системах беспроводной связи, например системах LTE, позволяя добиться повышенной производительности системы, в том числе емкость и зоны покрытия, и обеспечения дополнительных услуг. Получение информации состояния канала (CSI) на передатчике или приемнике важно для правильной реализация многоантенных подходов. В целом, характеристики канала, например, импульсная характеристика, оцениваются путем передачи и приема одной или более заранее заданных обучающих последовательностей, которые также можно называть опорными сигналами. Для оценивания характеристики канала, например, DL, BS передает опорные сигналы на UE, которые используют принятые версии известных опорных сигналов для оценивания канала DL. Затем UE могут использовать матрицу оцененных каналов для согласованной демодуляции принятого сигнала DL и получения возможных коэффициента усиления за счет формирования диаграммы направленности, коэффициента усиления за счет пространственного разнесения и коэффициента усиления за счет пространственного мультиплексирования, обеспечиваемых благодаря множественным антеннам. Кроме того, опорные сигналы можно использовать для осуществления измерения качества канала для поддержки адаптации линии связи.
В случае передачи OFDM, непосредственная структура опорного сигнала предназначена для передачи известных опорных символов в частотно-временной сетке OFDM. Опорные сигналы и символы, зависящие от соты, описаны в статьях 6.10 и 6.11 3GPP TS 36.211 V9.0.0, Evolved Universal Terrestrial Radio Access (E-UTRA), Physical Channels and Modulation (выпуск 9) (дек. 2009). Задано до четырех опорных сигналов, зависящих от соты, соответствующих до четырем передающим антеннам eNodeB. Такие опорные сигналы используются eNodeB для многопоточной пространственно мультиплексированой передачи на основе кодовой книги. Кодовая книга - это заранее заданный конечный набор из нескольких матриц предварительного кодирования, отличающихся рангом. В предварительном кодировании на основе кодовой книги, UE оценивает матрицу каналов на основании опорных сигналов, зависящих от соты, осуществляет исчерпывающий поиск по всем матрицам предварительного кодирования, и сообщает eNodeB предпочтительный указатель матрицы предварительного кодирования (PMI) согласно определенным критериям, таким образом, максимизируя пропускную способность системы и т.д. eNodeB может игнорировать PMI, определенный UE.
В 3GPP TS 36.211 также задан опорный сигнал, зависящий от UE, на антенном порте 5, который передается только на блоках ресурсов, на которые отображается соответствующий физический совместно используемый канал нисходящей линии связи (PDSCH). Опорный сигнал, зависящий от UE, поддерживает однопоточную передачу с формированием диаграммы направленности без опоры на кодовую книгу. В предварительном кодировании без опоры на кодовую книгу, весовая матрица предварительного кодирования, применяемая как к опорным символам, зависящим от UE, так и к символам данных, не получается из набора кодовых книг, но непосредственно вычисляется на eNodeB в соответствии с различными критериями, например, весовую матрицу можно вычислять на основании разложения по собственным векторам или направления приходящей волны. В системе дуплексной связи с временным разделением (TDD), благодаря двунаправленности канала, формирование диаграммы направленности/предварительное кодирование без опоры на кодовую книгу может дополнительно сокращать объем обратной связи восходящей линии связи и повышать коэффициент усиления за счет формирования диаграммы направленности.
В DL системе LTE может использоваться как предварительное кодирование на основе кодовой книги, так и формирование диаграммы направленности/предварительное кодирование без опоры на кодовую книгу для до четырех передающих антенн. Переключение режимов передачи между многопоточной пространственно мультиплексированной передачей на основе кодовой книги и однопоточной передачей с формированием диаграммы направленности без опоры на кодовую книгу полустатически конфигурируется посредством сигнализации более высокого уровня.
Некоторые системы связи, например LTE-Advanced, которая в настоящее время стандартизируется в 3GPP, могут применять более четырех передающих антенн для достижения более агрессивных уровней производительности. Например, система, имеющая eNodeB с восемью передающими антеннами, нуждается в расширении предварительного кодирования современной LTE на основе кодовой книги с точки зрения прекодера и опорного сигнала.
PRS передаются из одного антенного порта (R6) согласно заранее заданному шаблону, как описано, например, в статье 6.10.4 3GPP TS 36.211 V9.0.0, Evolved Universal Terrestrial Radio Access (E-UTRA), Physical Channels and Modulation (выпуск 9) (дек. 2009). Один из принятых в настоящее время шаблонов PRS показан на Фиг. 5, которая соответствует левой стороне Фиг. 6.10.4.2-1 3GPP TS 36.211, где квадраты, содержащие R6, указывают ресурсные элементы PRS в блоке двенадцати поднесущих на четырнадцать символов OFDM (т.е. 1-миллисекундном подкадре с нормальным циклическим префиксом).
Набор частотных сдвигов можно применять к заранее заданным шаблонам PRS для получения набора ортогональных шаблонов, которые можно использовать в соседних сотах для снижения помехи на PRS и, таким образом, улучшения измерений позиционирования. Таким образом, можно моделировать эффективное повторное использование частот, равное шести. Частотный сдвиг задается как функция физического ID соты (PCI) следующим образом:
vshift=mod(PCI,6).
где vshift - частотный сдвиг, mod() - функция взятия по модулю, и PCI - физический ID соты. PRS также можно передавать с нулевой мощностью, или заглушать.
Для повышения слышимости PRS, т.е. для обеспечения возможности обнаружения PRS из множественных зон и с разумным качеством, подкадры позиционирования были предложены как подкадры с низкими помехами, т.е., также было установлено соглашение, согласно которому, в подкадрах позиционирования, в целом, не разрешены передачи данных. В результате, PRS синхронных сетей в идеале не испытывают помех только от PRS из других сот, имеющих тот же индекс шаблона PRS, т.е. такой же вертикальный сдвиг (v_shift), в отличие от передач данных.
В частично выровненных асинхронных сетях, PRS все же могут испытывать помехи со стороны передач по каналам данных, каналам управления и любых физических сигналов, когда подкадры позиционирования сталкиваются с нормальными подкадрами, хотя помеха снижается за счет частичного выравнивания, т.е. благодаря выравниванию начальных моментов подкадров позиционирования в множественных сотах в половине подкадра относительно некоторой временной оси. PRS передаются в заранее заданных подкадрах позиционирования, сгруппированных по нескольким последовательным подкадрам (NPRS), т.е. одному событию позиционирования, которое происходит периодически с определенной периодичностью в N подкадров, т.е. интервалом времени между двумя событиями позиционирования. Принятые в настоящее время периоды N равны 160, 320, 640 и 1280 мс, и количество последовательных подкадров NPRS может составлять 1, 2, 4 или 6, как описано в вышеупомянутом 3GPP TS 36.211.
Как описано выше, способы и устройство согласно представленным выше вариантам осуществления включают в себя, но без ограничения, один или более из следующих аспектов: сигнализацию для поддержки конфигурации зазора, способы конфигурирования зазора и использование интерфейса X2 для обмена информацией на частоте, используемой для измерений позиционирования.
Кроме того, вышеописанные варианты осуществления могут быть включены в решения, касающиеся позиционирования в плоскости пользователя и/или управления, хотя последний вариант в настоящее время представляется более общим, и в другие способы позиционирования и их комбинации, помимо OTDOA и E-CID. Следует понимать, что это описание приведено в отношении eNodeB в качестве узла радиосети, но изобретение можно реализовать в узлах радиосети других типов, например, пико-BS, домашних NodeB и т.д.






Изобретение относится к способам и устройствам для поддержки конфигурации шаблона измерительных зазоров для пользовательского оборудования (91), которому требуются измерительные зазоры для осуществления межчастотного измерения. Технический результат состоит в увеличении объема радиоресурсов, доступного для внутричастотных измерений. Для этого узел (81) радиосети принимает от пользовательского оборудования (91) указание (85), что пользовательское оборудование (91) готовится к осуществлению межчастотного измерения для позиционирования, причем для межчастотного измерения требуются измерительные зазоры. Узел (81) радиосети может определять шаблон измерительных зазоров для осуществления межчастотного измерения и может сигнализировать на пользовательское оборудование (91) информацию (86) для инициирования использования определенного шаблона измерительных зазоров в пользовательском оборудовании (91). Альтернативно, пользовательское оборудование (91) само конфигурирует шаблон измерительных зазоров на основании набора заранее заданных правил. 4 н. и 31 з.п. ф-лы, 12 ил.
1. Способ, осуществляемый в узле (81) радиосети системы беспроводной связи и предназначенный для поддержки конфигурации шаблона измерительных зазоров для пользовательского оборудования (91), которому требуются измерительные зазоры для осуществления межчастотного измерения для позиционирования, причем способ содержит этап, на котором
принимают (71) от пользовательского оборудования указание (85), что пользовательское оборудование (91) готовится к осуществлению межчастотного измерения для позиционирования, причем для межчастотного измерения требуются измерительные зазоры, и упомянутое принятое указание включает в себя информацию о временной привязке возникновения опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения, при этом упомянутое принятое указание включает в себя информацию о смещении временной привязки, которую можно использовать для конфигурирования шаблона измерительных зазоров таким образом, чтобы достаточное количество опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения, попадало в измерительные зазоры шаблона измерительных зазоров.
2. Способ по п. 1, в котором межчастотное измерение является измерением разницы по времени относительно опорного сигнала, RSTD.
3. Способ по п. 1 или 2, в котором упомянутое принятое указание (85) включает в себя указание шаблона измерительных зазоров, в котором пользовательское оборудование (91) нуждается для осуществления межчастотного измерения.
4. Способ по п. 3, в котором упомянутое указание шаблона измерительных зазоров представляет собой указание необходимости в конфигурировании заранее заданного шаблона измерительных зазоров.
5. Способ по п. 4, в котором упомянутый заранее заданный шаблон измерительных зазоров задает зазор шириной 6 мс, который возникает каждые 40 мс.
6. Способ по п. 1, дополнительно содержащий этап, на котором определяют (73) на основании упомянутого принятого указания (85) шаблон измерительных зазоров для осуществления упомянутого межчастотного измерения.
7. Способ по п. 6, дополнительно содержащий этап, на котором сигнализируют на пользовательское оборудование (91) информацию (86) для инициирования использования определенного шаблона измерительных зазоров в пользовательском оборудовании (91).
8. Способ по п. 7, в котором упомянутая информация (86), сигнализируемая на пользовательское оборудование, содержит
время или точку отсчета, откуда надлежит применять определенный шаблон зазоров, и/или
определенный шаблон измерительных зазоров.
9. Способ по п. 8, дополнительно содержащий этап, на котором сохраняют определенный шаблон измерительных зазоров, связанный с пользовательским оборудованием.
10. Способ по п. 9, дополнительно содержащий этап, на котором принимают от пользовательского оборудования указание, что пользовательское оборудование (91) готовится остановить упомянутое межчастотное измерение.
11. Узел (81) радиосети системы беспроводной связи, причем упомянутый узел радиосети сконфигурирован для взаимодействия посредством сигнализации с пользовательским оборудованием (91), которому требуется конфигурация шаблона измерительных зазоров для осуществления межчастотного измерения, причем упомянутый узел радиосети содержит приемник (82), сконфигурированный для приема от пользовательского оборудования указания (85), что пользовательское оборудование (91) готовится к осуществлению межчастотного измерения для позиционирования, причем для межчастотного измерения требуются измерительные зазоры, причем упомянутое указание (85) включает в себя информацию о временной привязке возникновения опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения, при этом упомянутое указание (85) включает в себя информацию о смещении временной привязки, которую можно использовать для конфигурирования шаблона измерительных зазоров таким образом, чтобы достаточное количество опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения, попадало в измерительные зазоры шаблона измерительных зазоров.
12. Узел (81) радиосети по п. 11, в котором межчастотное измерение является измерением разницы по времени относительно опорного сигнала, RSTD.
13. Узел (81) радиосети по п. 11 или 12, в котором упомянутое указание (85) включает в себя указание шаблона измерительных зазоров, в котором пользовательское оборудование (91) нуждается для осуществления межчастотного измерения.
14. Узел (81) радиосети по п. 13, в котором упомянутое указание шаблона измерительных зазоров представляет собой указание заранее заданного шаблона измерительных зазоров.
15. Узел (81) радиосети по п. 14, в котором упомянутый заранее заданный шаблон измерительных зазоров задает зазор шириной 6 мс, который возникает каждые 40 мс.
16. Узел (81) радиосети по п. 11, дополнительно содержащий процессор (83), сконфигурированный для определения на основании упомянутого принятого указания шаблона измерительных зазоров для осуществления упомянутого межчастотного измерения.
17. Узел (81) радиосети по п. 16, дополнительно содержащий передатчик (84), сконфигурированный для сигнализации на пользовательское оборудование информации (86) для инициирования использования определенного шаблона измерительных зазоров в пользовательском оборудовании (91).
18. Узел (81) радиосети по п. 17, в котором упомянутый передатчик (84) сконфигурирован для включения в упомянутую информацию, сигнализируемую на пользовательское оборудование (91),
времени или точки отсчета, откуда надлежит применять определенный шаблон зазоров, и/или
определенного шаблона измерительных зазоров.
19. Узел (81) радиосети по п. 18, дополнительно содержащий память (88), сконфигурированную для хранения определенного шаблона измерительных зазоров, связанного с пользовательским оборудованием (91).
20. Узел (81) радиосети по п. 19, в котором приемник (82) дополнительно сконфигурирован для приема от пользовательского оборудования (91) указания, что пользовательское оборудование (91) готовится остановить упомянутое межчастотное измерение.
21. Способ, осуществляемый на пользовательском оборудовании (91) системы беспроводной связи и предназначенный для поддержки конфигурации шаблона измерительных зазоров для межчастотного измерения, осуществляемого пользовательским оборудованием (91), причем способ содержит этапы, на которых
принимают (101) указание (87), что пользовательскому оборудованию требуется начать межчастотное измерение для позиционирования, и
передают (102) на узел (81) радиосети указание (85), что пользовательское оборудование (91) готовится к осуществлению межчастотного измерения для позиционирования, причем для межчастотного измерения требуются измерительные зазоры, причем упомянутое переданное указание (85) включает в себя информацию о временной привязке возникновения опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения,
при этом способ дополнительно содержит этапы, на которых
в ответ на упомянутое принятое указание, определяют (103) на основании заранее заданного набора правил шаблон измерительных зазоров, подлежащий конфигурированию для осуществления межчастотного измерения,
конфигурируют (104) определенный шаблон измерительных зазоров в пользовательском оборудовании (91).
22. Способ по п. 21, в котором межчастотное измерение является измерением разницы по времени относительно опорного сигнала, RSTD.
23. Способ по п. 21 или 22, при этом способ дополнительно включает в себя этап, на котором определяют на основании возможностей пользовательского оборудования (91), что пользовательскому оборудованию (91) требуются измерительные зазоры для осуществления межчастотного измерения для позиционирования.
24. Способ по любому из пп. 21 и 22, дополнительно содержащий этап, на котором
принимают (105) от узла (81) радиосети информацию (86), указывающую определенный шаблон измерительных зазоров, подлежащий конфигурированию для осуществления межчастотного измерения,
конфигурируют (106) определенный шаблон измерительных зазоров в пользовательском оборудовании.
25. Способ по любому из пп. 21 и 22, в котором упомянутое переданное указание (85) включает в себя указание шаблона измерительных зазоров, в котором пользовательское оборудование нуждается для осуществления межчастотного измерения.
26. Способ по п. 21, в котором упомянутое переданное указание (85) включает в себя информацию о смещении временной привязки, которую можно использовать для конфигурирования шаблона измерительных зазоров таким образом, чтобы достаточное количество опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения, попадало в измерительные зазоры шаблона измерительных зазоров.
27. Способ по п. 21, дополнительно содержащий этап, на котором передают на узел (81) радиосети дополнительное указание, причем дополнительное указание указывает, что пользовательское оборудование (91) готовится остановить упомянутое межчастотное измерение.
28. Пользовательское оборудование (91) для использования в системе беспроводной связи, причем упомянутое пользовательское оборудование (91) сконфигурировано для взаимодействия посредством сигнализации с узлом (81) радиосети, причем пользовательское оборудование (91) содержит
приемник (92), сконфигурированный для приема указания (87), что пользовательскому оборудованию необходимо начать межчастотное измерение для позиционирования, для которого пользовательскому оборудованию требуются измерительные зазоры,
передатчик (94), сконфигурированный для передачи на узел (81) радиосети указания (85), что пользовательское оборудование (91) готовится к осуществлению межчастотного измерения для позиционирования, причем для межчастотного измерения требуются измерительные зазоры, причем упомянутый передатчик сконфигурирован для включения в указание (85), которое передатчик сконфигурирован передавать, информации о временной привязке возникновения опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения.
29. Пользовательское оборудование (91) по п. 28, в котором межчастотное измерение является измерением разницы по времени относительно опорного сигнала, RSTD.
30. Пользовательское оборудование (91) по п. 28 или 29, при этом пользовательское оборудование сконфигурировано для определения на основании возможностей пользовательского оборудования (91), что пользовательскому оборудованию (91) требуются измерительные зазоры для осуществления межчастотного измерения для позиционирования.
31. Пользовательское оборудование (91) по любому из пп. 28 и 29, дополнительно содержащее процессор (93), сконфигурированный для
определения, в ответ на упомянутое принятое указание (87) и на основании заранее заданного набора правил, шаблона измерительных зазоров, подлежащего конфигурированию для осуществления межчастотного измерения, и
конфигурирования определенного шаблона измерительных зазоров в пользовательском оборудовании.
32. Пользовательское оборудование (91) по любому из пп. 28 и 29, в котором упомянутый приемник (92) дополнительно сконфигурирован для приема от узла (81) радиосети информации, указывающей определенный шаблон измерительных зазоров, подлежащий конфигурированию для осуществления межчастотного измерения, и пользовательское оборудование (91) дополнительно содержит процессор (93), сконфигурированный для конфигурирования определенного шаблона измерительных зазоров в пользовательском оборудовании (91).
33. Пользовательское оборудование (91) по любому из пп. 28 и 29, в котором упомянутый передатчик сконфигурирован для включения в указание (85), которое передатчик сконфигурирован передавать, указания шаблона измерительных зазоров, в котором нуждается пользовательское оборудование для осуществления межчастотного измерения.
34. Пользовательское оборудование (91) по п. 28, в котором упомянутый передатчик сконфигурирован для включения в указание (85), которое передатчик сконфигурирован передавать, информации о смещении временной привязки, которую можно использовать для конфигурирования шаблона измерительных зазоров таким образом, чтобы достаточное количество опорных сигналов, подлежащих использованию для упомянутого межчастотного измерения, попадало в измерительные зазоры шаблона измерительных зазоров.
35. Пользовательское оборудование (91) по п. 28, в котором передатчик дополнительно сконфигурирован для передачи на узел (81) радиосети дополнительного указания, причем дополнительное указание указывает, что пользовательское оборудование (91) готовится остановить упомянутое межчастотное измерение.
| УСТРОЙСТВО И СПОСОБ ИДЕНТИФИКАЦИИ ГРАНИЦЫ СОСЕДНЕЙ ЯЧЕЙКИ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 2005 |
|
RU2280329C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

