Данная заявка испрашивает приоритет предварительной заявки США, серийный номер 61/230803, озаглавленной «Способ и устройство для измерения физических свойств свободнотекучих материалов в емкостях», поданной 3 августа 2009 года, которая полностью включена в данную заявку посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
Область техники
Аспекты настоящего изобретения относятся к системам и способам для неинвазивного измерения механических свойств негазообразных, свободнотекучих материалов в емкости и, в частности, для определения плотности и параметров, связанных с сопротивлением сдвигу негазообразного, свободнотекучего вещества.
Анализ уровня техники
Измерение плотности и вязкости является обязательной частью многих технологических процессов, охватывающих ряд отраслей, в том числе химической, фармацевтической, нефтяной и топливной, пищевой, строительных материалов и очистки сточных вод в качестве примера. Несмотря на то, что ряд способов для измерения плотности и вязкости были разработаны на протяжении веков промышленной эволюции, лишь немногие из этих способов могли претендовать на возможность измерять плотность и вязкость неинвазивно. Неинвазивное измерение физических свойств негазообразных материалов в емкостях традиционно осуществляется путем исследования материала с использованием одного или нескольких подходов. Методика исследования, применяемая этими подходами, имеет радиометрическую, гравитационную, оптическую или ультразвуковую природу.
Способы, основанные на радиации, отслеживают затухание радиоактивной энергии, проходящей через стенки емкости и материал, содержащийся внутри. К сожалению, способы, основанные на радиации, имеют множество недостатков. Например, плотность является главной целью таких способов, потому что способы, основанные на радиации, в основном, не подходят для измерения параметров, связанных с сопротивлением сдвигу, таких как вязкость жидкостей или объединение твердых частиц. Также устройства измерения плотности, которые используют радиацию, как правило, непортативны, так как монтаж, калибровка и поддержание точности и величины погрешности таких устройств требует наличия квалифицированных кадров. Кроме того, эти системы работают с пониженной точностью на плотностях от 20 до 150 г/л, характерных для порошковых материалов, таких как, например, AEROSIL. В дополнение использование систем, основанных на радиации, как правило, требует специальных проектных и эксплуатационных усилий, чтобы поддерживать достаточный уровень безопасности. Примерами таких основанных на радиации неинвазивных подходов для измерения плотности негазообразных материалов могут служить Радиационный прибор Uni-Probe LG 491, поставляемый на рынок компанией Berthold Technologies, а также устройства и способы, описанные в следующих патентах США: 4292522 (Okumoto), 4506541 (Cunningham), 6738720 (Robins) и 7469033 (Kulik и др.).
Гравитационные системы для измерения плотности негазообразных материалов требуют регулирования для учета веса пустой емкости и ее внутренних размеров. Гравитационные системы ограничены в своей применимости из-за проблем с установкой весоизмерительного оборудования, которое зачастую использует различные компоновки тензодатчиков. Кроме того, весоизмерительные системы не применимы для измерения вязкости.
Оптические способы, которые применяются для измерения плотности материалов в емкостях, оснащают отверстием для фокусировки оптического пучка, проходящего через заполняющий материал. Патент США 5110208 (Sreepada и др.) описывает один из таких подходов, в котором заполняющий материал является «в основном прозрачным» и «может иметь» дисперсную фазу из в основном прозрачных пузырьков, капель или частиц, которые имеют гладкую, округлую поверхность». Оптические, неинвазивные способы измерения плотности имеют ограниченное применение в связи с требованием прозрачности, предъявляемым к измеряемому материалу.
Способы, которые используют распространение ультразвуковых волн для измерения физических свойств материалов, заполняющих емкость, представляют особый интерес. Ультразвуковые способы демонстрируют отличную способность к дифференциации между разными свойствами материалов в емкости. Применительно к жидкости эти способы позволяют осуществлять измерение плотности или вязкости после того, как одно из этих свойств заранее определено. Однако традиционные способы измерения, которые используют ультразвуковые волны, характеризуются рядом недостатков.
Например, ультразвуковые способы, требуют значительной однородности заполняющего материала. Таким образом, методики, основанные на ультразвуке, не применимы к рыхлым твердым и гомогенным жидкостям, таким как грязь, суспензия, пульпа или шлам и т.п. Присутствие внутри емкости различных перемешивающих элементов, таких как смесители или барботеры, производит такой же негативный эффект на точность измерения плотности или вязкости. В дополнение эти способы требуют присоединения ультразвукового излучателя/приемника к стенке, емкости. Такие соединения обычно требуют специальной обработки поверхности контейнера для того, чтобы создать канал для ультразвуковых волн, излучаемых преобразователем в контейнер. Кроме того, ультразвуковые способы весьма чувствительны к помехам, влияющим на скорость звука в среде, таким как температура и колебания потока. Таким образом, специальные способы компенсации обычно используются для обеспечения инвариантности выходных параметров к этим возмущениям. Кроме того, количество энергии, потребляемой ультразвуковым преобразователем при обеспечении достаточной пульсации, может ограничить применение этих способов.
Примеры различных реализаций ультразвуковых способов для измерения плотности и вязкости представлены в следующих патентах и патентных заявках США: заявка 20030089161, патент США 7059171 (Gysling) для измерения плотности текущих жидкостей, патент США 5359541 (Pope и др.), который ограничен измерением плотности жидкостей в емкостях с акустическим излучателем и приемником, расположенных на противоположных сторонах емкости; патент США 6945094 (Eggen и др.) для измерения реологических свойств текущих жидкостей; патент США 5686661 (Singh) для измерения вязкости расплавленных материалов с высокой плотностью; патент США 6194215 (Rauh, и др.) для измерения и управления составом раствора. Некоторые ультразвуковые способы включают в себя действия (и некоторые устройства, реализующие способ, включают в себя средства) для минимизации влияния переменных, связанных с сопротивлением сдвигу заполняющего материала при измерении плотности.
СУЩНОСЬ ИЗОБРЕТЕНИЯ
Раскрытые здесь аспекты и примеры подтверждают тот факт, что одновременное измерение плотности и параметров, связанных с сопротивлением сдвигу (например вязкость гомогенных жидкостей), обеспечивает возможность для расширения диапазона измерений, повышение точности измерений и обеспечения большей применяемости ультразвуковых способов для измерения физических свойств негазообразных материалов. В дополнение аспекты и примеры, описанные здесь, подтверждают тот факт, что все известные неинвазивные методики измерения способа заполняющего материала ограничены, по меньшей мере, показателями заполняющего материала, влиянием среды и одновременным воздействием различных свойств материала на выходные параметры соответствующих измерительных систем. Таким образом, по меньшей мере, некоторые примеры развивают способ, основанный на вибрации, для одновременного неинвазивного измерения плотности содержимого в емкости и параметров, связанных с сопротивлением сдвигу, лишенный вышеупомянутых ограничений.
Согласно одному примеру, предложен неинвазивный способ для одновременного измерения плотности и переменных, связанных с сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость до известного уровня или до постоянного уровня. Способ включает в себя действия по инициации вибрации, по меньшей мере, в одной заранее заданной позиции на внешней стенке емкости, заполненной до заранее заданного уровня негазообразным свободнотекучим веществом, регистрации вибрационного отклика на механическую нагрузку, анализу зарегистрированного отклика, получению значений, по меньшей мере, двух оценочных переменных в результате этого анализа, заполнению системы уравнений, связанной с заполняющим материалом, включающие в себя, по меньшей мере, одну переменную, связанную с плотностью заполняющего материала, и одну переменную, связанную с сопротивлением сдвигу в качестве неизвестных, и, по меньшей мере, одно значение первой оценочной переменной и одно значение второй оценочной переменной, и решению этой системы уравнений относительно неизвестных, тем самым обеспечивая одновременное неинвазивное измерение переменной, связанной с плотностью и переменной, связанной с сопротивлением сдвигу заполняющего материала, находящегося в связанном объеме в непосредственной близости от центра механической нагрузки, приложенной к стенке емкости.
В соответствии с другим примером предложено устройство для неинвазивного одновременного измерения переменных, связанных с плотностью и сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость до известного уровня или до постоянного уровня. Устройство включает в себя механизм для формирования временной механической нагрузки на внешнюю стенку емкости, механизм для управления динамическими параметрами временной нагрузки, механизм для приема и направления для дальнейшей обработки вибрационного отклика стенки механизма для анализа вибрационного отклика и получения оценочных переменных и результата анализа, механизм для заполнения уравнений, используемых в процессе измерения, механизм для решения уравнений и получения измеренных значений искомых переменных и механизм для передачи значения искомых переменных и любых дополнительных значений переменных, зависящих от измеренных переменных, за пределы данного устройства.
Способ и устройство позволяет одновременно измерять плотность и вязкость гомогенных жидкостей, объемную плотность и вязкость гетерогенных жидкостей и объемную плотность и переменные, связанные с плотностью и сопротивлением сдвигу сыпучих твердых материалов.
Согласно другому примеру, предложен способ для неинвазивного одновременного измерения и переменной, связанной с плотностью и сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость. Способ содержит действия по: определению оптимального значения кинетической энергии, которая должна быть индуцирована во внешнюю стенку емкости после момента приложения временной механической нагрузки, направленной на стенку, инициации вибрации, по меньшей мере, в одной заданной позиции на внешней стенке емкости, заполненной до заранее заданного уровня негазообразным свободнотекучим веществом; регистрации вибрационного отклика на механическую нагрузку, анализ зарегистрированного отклика, получение значений, по меньшей мере, двух оценочных переменных в результате этого анализа, заполнению системы уравнений, связанной с заполняющим материалом, включающих в себя, по меньшей мере, одну переменную, связанную с плотностью заполняющего материала, и одну переменную, связанную с сопротивлением сдвигу в качестве неизвестных, и, по меньшей мере, одно значение первой оценочной переменной и одно значение второй оценочной переменной, в качестве параметров системы уравнений; и решению этой системы уравнений относительно неизвестных, тем самым обеспечивая одновременное неинвазивное измерение переменной, связанной с плотностью и переменной, связанной с сопротивлением сдвигу заполняющего материала, находящегося в связанном объеме в непосредственной близости от центра механической нагрузки, приложенной к стенке емкости.
В способе заполняющий материал может быть гомогенной жидкостью, гетерогенной жидкостью или сыпучим твердым материалом. Кроме того, в способе вибрация может формироваться посредством механической временной нагрузки, приложенной к внешней стенке емкости, причем нагрузка инициируется одним, выбранным из взаимодействия твердого тела со стенкой, гидродинамического взаимодействия, включающего в себя воздух и жидкий агент, баллистического удара и электродинамического взаимодействия. В способе механическая нагрузка может включать в себя единичный импульс, группу импульсов или непрерывную периодическую нагрузку. Кроме того, в способе механическая нагрузка может модулироваться в качестве одного, выбранного из амплитудной модуляции, частотной модуляции, импульсной модуляции, импульсно-кодовой модуляции, широтно-импульсной модуляции, а также их комбинацией, а механическая нагрузка может создаваться посредством преобразования энергии источника привода, выбранного из электромагнитного привода, механической энергии пружин, пневматических устройств, гидравлических устройств и баллистических ударных устройств.
В способе действие по регистрации может включать в себя операцию преобразования вибрации в сигнал, регистрируемый механизмом обработки сигнала и дополнительно анализируемый механизмом обработки данных в результате создания набора информативных переменных, служащих в качестве входных данных для формирования оценочных переменных способа. В способе результат анализа зарегистрированного сигнала включает в себя, без ограничения, по меньшей мере, один из следующих наборов информативных переменных, характеризующих интенсивность отклика стенки на удар: а) набор максимумов фильтрованного и выпрямленного сигнала, полученный на движущемся временном окне, которое превышает время выборки, б) сумма максимумов, в) сумма разностей между соседними максимумами. Кроме того, в способе результат анализа зарегистрированного сигнала может представлять собой время отклика стенки, вычисленное при условии, что зарегистрированный сигнал превышает установленный порог. Кроме того, в способе результат анализа зарегистрированного сигнала может представлять собой логарифмический декремент сигнала или коэффициент затухания. Кроме того, в способе результат анализа зарегистрированного сигнала может представлять собой гармонический спектр этого сигнала.
В способе действие по определению оптимального значения кинетической энергии может включать в себя действия по: инициированию вибрации стенки ударом по стенке при определенном начальном значении кинетической энергии, регистрации отклика сенсора, оценке выходного сигнала сенсора относительно критерия представления сигнала, регулировке значения кинетической энергии, которую ударник индуцирует в стенку в соответствии с принципом оптимизации, возвращению к действию по инициированию вибрации, если оптимизация не будет достигнута, и использованию полученного оптимального значения кинетической энергии в измерении.
В способе первая оценочная переменная может быть основана на наборе информативных переменных, характеризующих интенсивность отклика стенки, и вторая оценочная переменная может быть основана на наборе информативных переменных, характеризующих временные свойства зарегистрированного вибрационного отклика. Кроме того, в способе первая оценочная переменная может быть связана с зарегистрированным вибрационным откликом стенки и вторая оценочная переменная может быть связана с зарегистрированным вибрационным откликом, представляющим, по меньшей мере, одну упругую волну, проходящую через стенку и заполняющий материал, причем емкость заполнена гомогенной жидкостью.
В способе, по меньшей мере, одна из оценочных переменных может быть основана на наборе информативных переменных, характеризующих интенсивность отклика стенки, и вторая оценочная переменная может быть основана на наборе информативных переменных, характеризующих временные свойства вибрационного отклика стенки. Кроме того, в способе, по меньшей мере, одна из оценочных переменных основана на наборе информативных переменных, характеризующих комбинацию зарегистрированной амплитуды вибрационного отклика и временных свойств, включающих без ограничения механическую мощность и механическую работу, производимую стенкой во время зарегистрированного вибрационного отклика стенки.
В способе заранее определенная система уравнений может включать в себя оценочные переменные и соответствующие им количество рассчитываемых переменных так, что каждая оценочная переменная образует пару с соответствующей рассчитываемой переменной, причем обе компоненты пары переменных описаны одинаковыми единицами измерения. Кроме того, в способе, по меньшей мере, одна рассчитываемая переменная может быть функцией переменной, связанной с плотностью, и, по меньшей мере, одна рассчитываемая переменная может быть функцией переменной, связанной с сопротивлением сдвигу.
В способе заранее определенная система уравнений может иметь следующую структуру:

где S
m обозначает значение первой измеренной оценочной переменной; Q
m обозначает величину второй измеренной оценочной переменной; S
c обозначает величину первой рассчитанной оценочной переменной; Q
c обозначает величину второй рассчитанной оценочной переменной;  и
и  описывают естественные законы, управляющие зависимостями между переменными (Sm, Qm) и искомыми переменными
описывают естественные законы, управляющие зависимостями между переменными (Sm, Qm) и искомыми переменными  с переменной, связанной с плотностью, обозначенной
с переменной, связанной с плотностью, обозначенной  , и переменная, связанная с сопротивлением сдвигу, обозначается
, и переменная, связанная с сопротивлением сдвигу, обозначается  . Функции
. Функции  и представляют собой математическую модель динамической системы, содержащей элемент, создающий механический удар, воздействующий со стенкой емкости, и стенку, воздействующую с заполняющим материалом.
и представляют собой математическую модель динамической системы, содержащей элемент, создающий механический удар, воздействующий со стенкой емкости, и стенку, воздействующую с заполняющим материалом.
Способ может дополнительно включать с себя систему уравнений Навье-Стокса в математической модели, причем заполняющий материал представляет собой жидкость. Способ может также включать систему Burger-подобных уравнений в математической модели, причем заполняющий материал представляет собой сыпучий твердый материал.
В способе, где одна из неизвестных искомых переменных  является заранее определенной, способ может включать в себя решение одного уравнения:
является заранее определенной, способ может включать в себя решение одного уравнения:
Причем  обозначает измеренное значение оценочной переменной;
обозначает измеренное значение оценочной переменной;  обозначает рассчитанную оценочную переменную, функция
обозначает рассчитанную оценочную переменную, функция  представляет собой естественные законы, регулирующие отношение между переменной
представляет собой естественные законы, регулирующие отношение между переменной  и искомой переменной
и искомой переменной  . Согласно способу, если математическая модель
. Согласно способу, если математическая модель  недоступна, то способ может включать в себя действие по измерению искомой переменной, исполняемое посредством выполнения процедуры, содержащей два действия. В соответствии со способом, первое действие включает в себя замену математической модели экспериментальной кривой, обозначаемой
недоступна, то способ может включать в себя действие по измерению искомой переменной, исполняемое посредством выполнения процедуры, содержащей два действия. В соответствии со способом, первое действие включает в себя замену математической модели экспериментальной кривой, обозначаемой  , и набором предварительно измеренных значений переменной
, и набором предварительно измеренных значений переменной  , обозначаемой
, обозначаемой  . Второе действие включает в себя решение уравнения
. Второе действие включает в себя решение уравнения  относительно неизвестной искомой переменной . Дополнительно операция перового действия в процедуре измерения представляет собой процесс измерения по нескольким точкам с минимальным количеством измерений, равных двум, и операция описывается следующей системой алгебраических уравнений:
относительно неизвестной искомой переменной . Дополнительно операция перового действия в процедуре измерения представляет собой процесс измерения по нескольким точкам с минимальным количеством измерений, равных двум, и операция описывается следующей системой алгебраических уравнений:
где  обозначает вектор-столбец значений измеряемой оценочной переменной,
обозначает вектор-столбец значений измеряемой оценочной переменной,  обозначает вектор-столбец предварительно измеренных значений искомой переменной
обозначает вектор-столбец предварительно измеренных значений искомой переменной
В соответствии с другим аспектом предложено устройство для неинвазивного одновременного измерения переменных, связанных с плотностью и сопротивлением сдвигу. Устройство включает в себя механизм для формирования временной механической нагрузки на внешней стенке емкости, механизм для управления динамическими параметрами временной нагрузки, механизм для приема и направления для дальнейшей обработки вибрационного отклика стенки, механизм для анализа вибрационного отклика и получения оценочных переменных в результате такого анализа, механизм для заполнения уравнений, используемых в процессе измерения, механизм для решения уравнений и получения измеренных значений искомых переменных, а также механизм для направления искомых значений переменных и любых дополнительных значений переменных, связанных с измеренными переменными, за пределы данного устройства. Механизмы и устройства могут включать в себя множество механических, электрических, электронных устройств и элементов программного обеспечения, предназначенных для создания машиночитаемой среды для обеспечения функционирования системы измерения или измерительных механизмов, реализующих неинвазивное одновременное измерение переменной, связанное с плотностью и сопротивлением сдвигу свободнотекучего вещества, заполняющего емкость. Один пример такой компьютерной системы включает в себя аппаратные и программные элементы, которые рассматриваются далее со ссылкой на фиг.14 ниже. Более того, функция формирования временной механической нагрузки на внешней стенке емкости может быть связана с блоком «Ударник» измерительного механизма. Дополнительно функция для управления динамическими параметрами временной нагрузкой может быть отнесена к блоку Управления Ударом измерительного механизма. Более того, функция для приема и направления для дальнейшей обработки вибрационного отклика стенки может быть связана с блоком Приемник измерительного механизма. Дополнительно функция для анализа вибрационного отклика и получения оценочных переменных в результате анализа может быть связана с блоком Анализатор измерительного механизма. Дополнительно функция для заполнения уравнений, используемых в процессе измерения, может быть связана с блоком Генератор Уравнений» измерительного механизма. Также функция для решения уравнений и получения измеренных значений искомых переменных может быть отнесена к блоку Решатель Уравнения измерительного механизма, и функция для направления искомых значений переменных и значений дополнительных переменных, связанных с искомыми переменными, за пределы данного измерительного устройства может быть отнесена к блоку Выходной Интерфейс измерительного механизма.
В устройстве выход блока Приемник может быть подключен ко входу блока Анализатор, и первый выход блока Анализатор может быть подключен к первому входу блока Управления Ударом, причем первый выход может быть соединен с первым входом блока Ударник, и второй выход может быть подключен ко второму входу блока Ударник; второй выход блока Анализатор может быть подключен ко второму входу блока Управления Ударом, причем второй выход может быть подключен ко второму входу блока Ударник и второй выход может быть подключен ко второму входу блока Ударник; третий выход блока Анализатор может быть соединен с первым входом блока Генератор Уравнений, и заранее определенное предполагаемое значение для переменной плотности может быть вторым входом блока Генератор Уравнений, и заранее определенное предполагаемое значение переменной, связанной с сопротивлением сдвигу, может быть третьим входом блока Генератор Уравнений; и выход блока Генератор Уравнений может быть подключен ко входу блока Решатель Уравнений, причем первый выход которого может быть измеренной переменной плотности, и причем второй выход которого может быть измеренной переменной, связанной с сопротивлением сдвигу, и первый выход блока Решатель Уравнений может быть соединен с первым входом блока Выходной Интерфейс, и второй выход блока Решатель уравнений может быть подключен ко второму входу Выходной Интерфейс; первый выход блока «Выходной Интерфейс» предоставляет информацию об измеренной плотности за пределы данного устройства, а второй выход блока «Выходной Интерфейс» предоставляет информацию об измеренной переменной, связанной с сопротивлением сдвигу за пределы данного устройства, а третий выход блока «Выходной Интерфейс» может быть вектором двоичных тревожных сигналов для различных версий управления ВКЛ/ВЫКЛ.
В устройстве блок Ударник может приводиться в действие сочетанием входных сигналов, приходящих от блока Управление Ударом. Блок Ударник может прикладывать механическое воздействие типа единичный импульс, группа импульсов или непрерывную модулированную периодическую нагрузку на стенку емкости. Кроме того, в данном устройстве блок Ударник может содержать два функциональных элемента, причем первый функциональный элемент отвечает за получение временной нагрузки в соответствии с определенной диаграммой зависимости скорости от времени, и второй функциональный элемент отвечает за получение временной нагрузки в соответствии с определенной диаграммой зависимости ударной массы к времени, и оба канала функционирования могут быть синхронизированы, что позволяет осуществлять промежуточное управление количеством кинетической энергии, формируемой временной механической нагрузкой.
В устройстве функциональные каналы могут использовать электромагнитную энергию соленоидов или электрических двигателей. Кроме того, в этом устройстве функциональные каналы могут использовать систему гидравлического или пневматического привода. Дополнительно в устройстве функциональные элементы могут использовать магнитострикционный привод. Кроме того, функциональные элементы могут использовать привод с помощью пьезопреобразователя. Кроме того, функциональные элементы могут использовать баллистический привод. Кроме того, функциональные элементы используют привод на основе возможной комбинации вышеуказанных способов.
В устройстве блок Приемник, который регистрирует вибрационный отклик стенки, может состоять из механизма приема механических колебаний, и механизма формирования сигнала, связанного с пропорциональным откликом, и механизма формирования сигнала, связанного с пропорциональным откликом, может выполнять преобразование сигнала, квантификацию, хранение и другие операции, необходимые для направления сигнала в блок Анализатор.
В данном устройстве блок Анализатор может выполнять операции над сигналом, связанным с пропорциональным откликом, формирующим Приемник, по меньшей мере, три типа переменных и первый тип переменных, предназначенный для оптимизации качества сигнала, зарегистрированного блоком Приемник, может быть связан с первой выходной шиной блока Анализатор и вторым типом переменных, предназначенным для оптимизации качества сигнала, зарегистрированного блоком Приемник, может быть связан с первой выходной шиной блока Анализатор, а третий тип переменных может быть связан с третьей выходной шиной блока Анализатор, включая в себя, по меньшей мере, две оценочных переменных, предназначенных для подачи в блок Формирования Уравнений в устройстве.
Блок Управления Ударом может оптимизировать количество кинетической энергии, индуцированной в стенку блоком Ударник, посредством контролирования приводной системы функциональных элементов блока Ударник в соответствии со способом оптимизации кинетической энергией, и первый выход блока Управления Ударом может обеспечить контроль скорости блока Ударник, и второй выход блока Управления Ударом обеспечивает контроль эффективной массы блока Ударник.
В устройстве блок Формирования Уравнений может принимать оценочные переменные из третьей шины вывода блока Анализатор, чтобы заполнить систему основных уравнений способа, и пару предполагаемых значений искомой переменной плотности, связанной со вторым входом блока Формирования Уравнений. Искомая переменная, связанная с сопротивлением сдвигу, которая связана с третьим входом блока Формирования Уравнений, может создать предполагаемый вектор, необходимый для численного решения системы основных уравнений, и компоненты предполагаемого вектора хранятся в управляемой базе данных блока Формирования Уравнений, и выходная шина блока Формирования Уравнений может являться численно-заполненной системой основных уравнений, предназначенной для решения блоком Решатель Уравнений.
В устройстве блок Решатель Уравнений выполняет, по меньшей мере, один способ, подходящий для решения класса уравнений, поставляемых блоком Формирования Уравнений, формирующим численные значения плотности, и переменную, связанную с сопротивлением сдвигу, связанную с экземпляром переходного состояния заполняющего материала в момент регистрации выхода блока Приемник.
В устройстве, если оно сконфигурировано для обработки гомогенных жидкостей, выходная шина блока Решатель Уравнений может включать в себя плотность и динамическую вязкость. Кроме того, выходная шина блока Решатель Уравнений может включать в себя объемную плотность, если она сконфигурирована для обработки гетерогенных жидкостей. Кроме того, выходная шина блока Решатель Уравнений может включать в себя объемную плотность и переменную, связанную с сопротивлением сдвигу, когда она сконфигурирована для обработки сыпучих твердых материалов.
Устройство может включать в себя аналоговые или цифровые входные интерфейсы, причем любой входной аналоговый или цифровой интерфейс или выходной аналоговый или цифровой интерфейс может содержать аппаратное или программное обеспечение или сочетание аппаратного и программного обеспечения. Кроме того, интерфейс может представлять функциональность векторной передачи данных внутри вычислительного и управляющего механизма и других функциональных блоков устройства. Функциональные блоки и интерфейсы могут иметь несколько реализаций, включая единый дизайн или дизайн, состоящий из двух частей, причем блок Ударник, блок Управление Ударом и блок Приемник находятся в одном корпусе и остальной аппарат находится в другом корпусе.
Согласно другому аспекту, предложено устройство для неинвазивного одновременного измерения массового расхода и переменной, связанной с плотностью и сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость. Устройство включает в себя устройство для неинвазивного одновременного измерения массового расхода и переменной, связанной с плотностью и сопротивлением сдвигу в негазообразное свободнотекучее вещество, заполняющее емкость, и устройство для неинвазивного измерения объемного расхода негазообразного свободнотекучего вещества, которое движется в емкости, таким образом обеспечивая возможность одновременного измерения массового расхода и переменной, связанной с плотностью и сопротивлением сдвигу, посредством выполнения измерения расхода, посредством умножения измеренной плотности на измеренный объемный расход. Устройство может также включать ультразвуковой расходомер на основе доплеровского эффекта для измерения объемного расхода.
Согласно другому примеру, предложен способ неинвазивного одновременного измерения переменной, связанной с плотностью и сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость. Способ включает в себя действия по: определению оптимального значения механической энергии, которая должна быть индуцирована во внешнюю стенку емкости после момента приложения временной механической нагрузки, направленной на стенку; инициации вибрации, по меньшей мере, в одно заранее заданное положении на внешней стенке емкости, заполненной до известного уровня негазообразным свободнотекучим веществом; регистрацию вибрационного отклика стенки на механическую нагрузку; анализу зарегистрированного отклика; получению значений, по меньшей мере, двух оценочных переменных в результате анализа; заполнению системы уравнений, связанной с заполняющим материалом, включающих в себя, по меньшей мере, одну переменную, связанную с плотностью заполняющего материала, и одну переменную, связанную с сопротивлением сдвигу в качестве неизвестных, и, по меньшей мере, одно значение первой оценочной переменной и одно значение второй оценочной переменной, и решению этой системы уравнений относительно неизвестных, тем самым обеспечивая одновременное неинвазивное измерение переменной, связанной с плотностью и переменной, связанной с сопротивлением сдвигу заполняющего материала, находящегося в связанном объеме в непосредственной близости от центра механической нагрузки, приложенной к стенке емкости.
В способе заполняющий материал может быть гетерогенным материалом, и данный гетерогенный материал может представлять собой смесь жидких и твердых материалов или быть многофазной жидкостью с/без четкой границей между составляющими материалами. Кроме того, вибрация может осуществляться с помощью механической временной нагрузки, прилагаемой к внешней стенке емкости; нагрузка инициируется одним, выбранным из взаимодействия твердого тела со стенкой, гидродинамическим взаимодействием, включающим в себя воздух и/или жидкий агент, баллистическим ударом и электродинамическим взаимодействием.
Кроме того, результат анализа зарегистрированного сигнала может включать в себя, по меньшей мере, одно из следующих: наборов информативных переменных, характеризующих отклик стенки на удар: а) набор максимумов фильтрованного и выпрямленного переменного сигнала, полученного на движущемся временном окне, которое превышает время выборки, б) сумма максимумов, в) сумма разностей между соседними максимумами. Кроме того, результат анализа регистрированного сигнала может включать в себя гармонический спектр сигнала.
В способе оптимизация количества механической энергии, индуцированной в стенку, может быть выполнена путем реализации следующих действий: установка начального и конечного значения динамического диапазона и чувствительности вибрационного сенсорного механизма, таким образом создавая внешний цикл управления ударом; инициации вибрации стенки при помощи удара по стенке с определенным начальным значением кинетической энергии, тем самым реализуя внутренний цикл управления ударом; регистрации отклика датчика; оценки выходного сигнала датчика относительно критерия представления сигнала; проверки того, что оптимизация удара достигнута; использования полученного оптимального значения кинетической энергии в измерении, если оптимизация удара достигнута; если оптимизация удара не достигнута, то осуществить регулировку значения кинетической энергии, которую ударник индуцирует в стенку согласно принципу оптимизации; возврату к этапу инициации вибрации, таким образом замыкая внутренний цикл управления ударом; изменения динамического диапазона и/или чувствительности вибрационного сенсорного средства, если оптимизация удара не достигнута во внутреннем цикле, таким образом закрывая внешний цикл управления ударом; выполнения второго этапа способа контроля удара и использования полученного оптимального значения кинетической энергии в измерении, если оптимизация удара достигнута.
Согласно другому примеру, предложено устройство для неинвазивного одновременного измерения переменной, связанной с плотностью и сопротивлением сдвигу, в негазообразном свободнотекучем материале, заполняющем емкость. Устройство включает в себя механизм для формирования временной механической нагрузки на внешней стенке емкости; механизм управления динамическими параметрами указанной временной нагрузки; механизм для приема и направления для дальнейшей обработки вибрационного отклика стенки; механизм для анализа указанного вибрационного отклика и получения оценочных переменных в результате анализа; механизм для заполнения уравнений, которые используются в процессе измерения; механизм для решения уравнений и получения измеренных значений указанных искомых переменных и механизм для направления искомых переменных и любых значений дополнительных переменных, связанных с указанными измеренными переменными, за пределы устройства.
В устройстве выход блока Приемник может быть подключен к входу блока Анализатор; первый выход блока Анализатор может быть подключен к первому входу блока Управление Ударом, выход которого подключен ко входу блока Ударник; второй выход блока Анализатор может быть подключен к первому входу блока Формирователь Уравнения; третий выход блока Анализатор может быть подключен ко второму входу блока Приемник; заранее определенное предварительное значение для переменной плотности включает в себя второй вход блока Формирователь Уравнений, и заранее определенное предварительное значение для переменной, связанной с сопротивлением сдвигу, включает в себя третий вход блока Формирователь Уравнений; выход блока Формирователь Уравнений может быть подключен к входу блока Решатель Уравнений, первый выход которого включает в себя измеренную переменную плотности, и второй выход которого включает в себя переменную, связанную с сопротивлением сдвигу; первый выход блока Решатель Уравнений может быть подключен к первому входу блока Выходной Интерфейс, и второй выход блока Решатель Уравнений» может быть подключен ко второму входу блока Выходной Интерфейс; первый выход блока Выходной Интерфейс может направлять информацию о измеренной плотности за пределы устройства настоящего изобретения, а второй выход блока Выходной Интерфейс может направлять информацию о измеренной переменной, связанной с сопротивлением сдвигу, а третий выход блока Выходной Интерфейс включает в себя вектор двоичных тревожных сигналов для различных версий управления ВКЛ/ВЫКЛ.
В устройстве блок Анализатор может выполнять операции над сигналом, пропорциональным отклику, формирующим, по меньшей мере, три типа переменных: первый тип переменных, предназначенный для оптимизации качества сигнала, регистрированного блоком Приемник, может быть связан с первым выходом блока Анализатор; второй тип переменных может быть связан со второй выходной шиной блока Анализатор, включающего в себя, по меньшей мере, две оценочных переменных, предназначенных для подачи в блок Решатель Уравнений; третий тип переменных, предназначенный для оптимизации качества сигнала, регистрированного блоком Приемник путем управления выбором параметров настройки указанного механизма приема вибрации, может быть связан с третьим выходом блока Анализатор. Кроме того, блок Управление Ударом» может оптимизировать количество кинетической энергии, индуцированной в стенку блоком Ударник путем управления приводных систем функциональных элементов блока Ударник в соответствии со способом оптимизации кинетической энергии. Далее выходная шина из блока Решатель Уравнений может содержать плотность и динамическую вязкость; выходная шина блока Решатель Уравнений может содержать объемные значения плотности и вязкости, выходная шина блока Решатель Уравнений может содержать значения объемной плотности и вязкости; и выходная шина блока Решатель Уравнений может содержать переменную, связанную с объемной плотностью и сопротивлением сдвигу.
Согласно другому примеру, предлагается устройство для неинвазивного одновременного измерения массового расхода, переменной связанной с плотностью и сопротивлением сдвигу негазообразного свободнотекущего вещества заполняющего емкость.
Данное устройство включает в себя устройство для неинвазивного одновременного измерения переменной, связанной с плотностью и сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость. Устройство также включает в себя устройство для неинвазивного одновременного измерения расхода, переменных, связанных с, плотностью и сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющих емкость и устройство для неинвазивного измерения объемного расхода негазообразного свободнотекучего вещества, перемещающегося через емкость, что позволяет одновременно измерять массовый расход, плотность и переменную, связанную с сопротивлением сдвигу посредством проведения измерения расхода посредством выполнения умножения измеренной плотности на измеренный объемный расход. Устройство может также иметь применение, в котором измерение объемного расхода выполняют при помощи ультразвукового расходомера на основе доплеровского эффекта.
Согласно другому примеру, предлагается устройство для неинвазивного одновременного послойного измерения плотности и переменной, связанной с сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость. Данное устройство включает в себя устройство для одновременного неинвазивного измерения плотности и переменной, связанной с сопротивлением сдвигу негазообразного свободнотекучего вещества, заполняющего емкость и систему акустических преобразователей, которые расположены соосно на противоположных концах емкости. В устройстве первый преобразователь может излучать упругую волну, проходящую сквозь стенку и содержимое емкости; второй преобразователь может принимать упругую волну, излученную первым преобразователем, и формирование упругой волны может быть синхронизировано с ударами данного аппарата для одновременного неинвазивного измерения плотности и переменной, связанной с сопротивлением сдвигу. Кроме того, устройство может дополнительно осуществлять последовательное изменение механической энергии ударов для поэтапного увеличения связанного объема вещества, содержащегося в емкости, участвующего в колебании в направлении нормали к поверхности стены, в результате чего создается суперпозиция упругих волн и колебания связанного объема вещества, содержащегося в емкости, тем самым обеспечивая возможность послойного измерения плотности и переменной, связанной с сопротивлением сдвигу содержащегося вещества.
Согласно другому примеру, предлагается способ измерения физических свойств материала в емкости. Способ включает в себя действия по инициации вибрации на стенке емкости, регистрации вибрационного отклика, получению значений, по меньшей мере, для двух оценочных переменных, основанных на отклике, и решению системы уравнений, включающей в себя, по меньшей мере, одну переменную плотности и, по меньшей мере, одну переменную, связанную с сопротивлением сдвигу, с использованием, по меньшей мере, двух оценочных переменных.
В способе действие по инициации вибрации может включать в себя действие по приложению механической нагрузки к внешней стенке емкости. Кроме того, действие по приложению механической нагрузки может включать в себя действие по приложению, по меньшей мере, одного из единичного импульса, группы импульсов или непрерывной периодической нагрузки. Дополнительно действие по инициации вибрации может включать в себя действие по инициации вибрации в материале, причем материал может представлять собой, по меньшей мере, одно из гомогенной жидкости, сыпучего твердого материала и гетерогенного материала, включающего в себя смесь жидких и твердых материалов. Кроме того, действие по регистрации отклика может включать в себя действие по регистрации информативных переменных, характеризующих отклик стенки на вибрацию.
Способ может дополнительно включать в себя действие по анализу отклика для определения, по меньшей мере, одного из набора максимумов переменного сигнала, полученного на движущемся временном окне, которое превосходит время выборки, сумму набора максимумов и сумму разностей между соседними максимумами набора. Кроме того, способ может дополнительно включать в себя действие по анализу отклика для определения логарифмического декремента сигнала или коэффициента затухания. Далее, способ может включать действие по анализу отклика для определения гармонического спектра сигнала. Кроме того, способ может дополнительно включать в себя действие по регулировке количества кинетической энергии, используемой для инициации вибрации, посредством анализа отклика. В способе действие по регулировке количества кинетической энергии может включать в себя действие по проверке количества кинетической энергии, проявляющееся в результате другого отклика на вибрацию, которая соответствует заранее определенному набору пороговых характеристик.
Согласно другому примеру, предлагается устройство для измерения физических свойств материала в емкости. Устройство включает в себя ударник, сконфигурированный для инициации вибрации на стенке емкости, датчик, сконфигурированный для регистрации отклика на вибрацию, и контроллер, сконфигурированный для получения значений для, по меньшей мере, двух оценочных переменных, основываясь на отклике, и для решения системы уравнений, включающих в себя, по меньшей мере, одну переменную плотности и одну переменную, связанную с сопротивлением сдвигу, с использованием, по меньшей мере, двух оценочных переменных.
В устройстве ударник может быть сконфигурирован для приложения механической нагрузки к внешней стенке емкости. Кроме того, механическая нагрузка может включать в себя, по меньшей мере, одно, из единичного импульса, группы импульсов или непрерывной периодической нагрузки. Дополнительно материал может представлять собой, по меньшей мере, одно из гомогенной жидкости, сыпучего твердого материала и гетерогенного материала, включающего в себя смесь жидких и твердых материалов. Кроме того, датчик может быть сконфигурирован для регистрации информативных переменных, характеризующих отклик стенки на вибрацию. Кроме того, датчик может быть дополнительно сконфигурирован для анализа отклика для определения, по меньшей мере, одного из набора максимумов переменного сигнала, полученного на движущемся временном окне, которое превосходит время выборки, сумму указанного набора максимумов и сумму разностей между соседними максимумами в наборе.
В данном устройстве контроллер может быть дополнительно сконфигурирован для анализа отклика для определения логарифмического декремента сигнала или коэффициента затухания. Кроме того, контроллер может быть дополнительно сконфигурирован для анализа отклика для определения гармонического спектра сигнала. Устройство может также включать в себя контроллер удара, связанный с ударником и датчиком и сконфигурированный для регулирования, посредством анализа отклика, количества кинетической энергии, используемой ударником для инициации вибрации. В этом примере контроллер ударника может быть дополнительно сконфигурирован для проверки количества кинетической энергии, проявляющейся в другом отклике на вибрацию, которая соответствует заранее определенному набору пороговых характеристик. В дополнение к сказанному, другие аспекты, примеры и преимущества этих характерных аспектов и примеров подробно обсуждаются ниже. Следует понимать, что и вышеуказанная информация, и следующее подробное описание являются лишь иллюстративными примерами различных аспектов и вариантов и предназначены для обеспечения общего понимания природы и характера заявленных аспектов и вариантов. Любой пример, описанный здесь, может сочетаться с любым другим примером в любой форме в соответствии с, по меньшей мере, одним из объектов, целей и потребностей, описанных здесь, и ссылки на «пример», «примеры», «альтернативный пример», «различные примеры», «один пример», «по меньшей мере, один пример», «этот и другие примеры» и т.д. не обязательно являются взаимоисключающими, и предназначены для указания того, что особенный признак, структура или характеристика, описанная в связи с примером, может быть включена, по меньшей мере, в другой пример. Появление таких терминов здесь не обязательно относится к одному и тому же примеру.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Различные аспекты, по меньшей мере, одного примера обсуждаются ниже со ссылкой на сопровождающие чертежи, которые не выполнены в масштабе стандартных чертежей.
Включенные чертежи предназначены для обеспечения иллюстрации, и более глубокое понимание всевозможных аспектов и примеров включено в и является частью этого описания, но не предназначено для определения ограничений изобретения.
Чертежи, вместе с остальной частью описания, служат для объяснения принципов и операций, описанных и заявленных аспектов и примеров. На чертежах каждый идентичный или почти идентичный компонент, который изображен на различных фигурах, представляется цифрой. Для лучшей читаемости не все компоненты могут быть помечены в каждом чертеже. На чертежах:
на фиг.1 показана одномерная структурная схема, описывающая поведение неньютоновской жидкости около внутренней стенки емкости, когда стенка активируется ударом ударника в направлении нормали к стенке.
На фиг.2 показана одномерная структурная схема, описывающая поведение сыпучего твердого вещества, около внутренней стенки емкости, когда стенка активируется ударом ударника в направлении нормали к стенке.
На фиг.3 показана функциональная схема экспериментальной установки для испытания способа определения плотности и переменной, связанной с сопротивлением сдвигу жидких заполняющих веществ.
На фиг.4а показано графическое представление экспериментального вибрационного отклика стенки резервуара, измеренного в стандартных единицах измерения устройства мониторинга колебаний (OMD), выходные данные которого представляют собой кинематическую вязкость экспериментальных жидкостей, измеренную в сСт.
На фиг.4b показано графическое представление экспериментального вибрационного отклика стенки резервуара, измеренного в стандартных единицах измерения устройства мониторинга колебаний (OMD), выходные данные которого представляют собой кинематическую вязкость экспериментальных жидкостей, измеренную в сСт.
На фиг.5 показана схематическая диаграмма экспериментальной трубы с установленным устройством мониторинга колебаний (OMD).
На фиг.6 показано графическое представление экспериментального вибрационного отклика стенки резервуара, измеренного в стандартных единицах измерения устройства мониторинга колебаний (OMD), выходные данные которого представляют собой объемную плотность порошкообразного образца, измеренную в г/л.
На фиг.7 показана гистограмма, демонстрирующая зависимость выходных данных устройства мониторинга колебаний (OMD) от вертикального положения на стене, и наличие вибраций, сформированных не с помощью устройства мониторинга колебаний (OMD), приложенных к корпусу экспериментальной емкости.
На фиг.8 показана симулированная временная диаграмма, демонстрирующая основную гармонику выходных данных вибрационного датчика, зависящую от степени изменения в объемной плотности порошкового образца.
На фиг.9 показана функциональная блок-схема устройства для определения плотности и переменной, связанной с сопротивлением сдвигу.
На фиг.10 показана обобщенная блок-схема одной из версий адаптивной подсистемы управления ударом для устройства определения плотности и переменной, связанной с сопротивлением сдвигу в среде.
На фиг.11 показана блок-схема адаптивной подсистемы управления ударом для устройства определения плотности и переменной, связанной с сопротивлением сдвигу в среде.
На фиг.12 показана диаграмма, поясняющая принцип работы в поперечном сечении использования измерения плотности/вязкости.
На фиг.13 показана блок-схема алгоритма способа определения плотности и переменной, связанной с сопротивлением сдвигу в среде.
На фиг.14 показана блок-схема одного примера компьютерной системы, которая может быть использована для выполнения описанных процессов.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Описанные здесь аспекты и примеры относятся к способам и устройствам определения физических свойств материала, размещенного внутри емкости. Например, согласно одному примеру, устройство включает в себя ударник, сенсор вибрации и контроллер, сконфигурированный для определения плотности и переменной, связанной с сопротивлением сдвигу негазообразного материала, расположенного внутри емкости. В некоторых примерах негазообразный материал представляет собой жидкость. В других примерах негазообразный материал представляет собой твердое тело. Согласно другому примеру, устройство, подобно вышеописанному, выполняет способ для определения физических свойств материала, находящегося внутри емкости. Во время выполнения примерного способа устройство определяет плотность и переменную, связанную с сопротивлением сдвигу негазообразного материала, размещенного внутри емкости посредством заполнения системы уравнений эмпирическими данными и решением этой системы уравнений.
Следует отметить, что примеры способов и устройств, которые обсуждаются здесь, не ограничены в применении к деталям конструкции и расположению компонентов, изложенных в нижеприведенном описании или иллюстрированных в сопровождающих чертежах. Способы и устройства пригодны к использованию в других примерах и могут быть реализованы или воплощены другими способами. Примеры конкретных осуществлений, указанные здесь, представлены только для иллюстрации и никак не могут ограничить данное изобретение. В частности, действия, элементы и функции, описанные в связи с тем или другим примером, не исключают их использования подобным же образом в других примерах.
Кроме того, фразеология и терминология, используемая в настоящем документе, служат с целью описания и не должны рассматриваться как ограничивающие. Любые ссылки на примеры, элементы или действия систем и способов, здесь указанные в единственном числе, могут также охватывать примеры, которые включают в себя множество этих элементов, и любые ссылки во множественном числе на любой пример, элемент или действие здесь, могут также охватывать примеры, которые включают в себя только один элемент. Ссылки в виде единственного или множественного числа не должны ограничивать существующие данные системы или способы, их компоненты, действий, или элементы. Использование здесь «включающий в себя», «содержащий», «имеющий», «включая», «связанный» и их разновидности предназначено, чтобы охватить пункты, перечисленные в дальнейшем, и их эквиваленты, а также дополнительные пункты. Ссылки на «или» могут быть истолкованы включительно, так что любые термины, описанные с помощью «или», могут означать любой единственный, более чем один и все описанные термины.
Процесс измерения
Примеры способов, описанные здесь, основаны на наблюдении за колебательным движением внешней стенки емкости. Такое движение может быть инициировано приложением временной механической нагрузки, направленной в сторону стенки. Данный способ использует свойства динамической системы с двумя областями «Стенка емкости - Заполняющий материал», так что на относительно небольшом расстоянии между точкой приложения нагрузки колебание механической динамической системы «мгновенная связанная масса заполняющего материала - мгновенная связанная масса стенки емкости» используется, чтобы получить информацию для одновременного определения плотности и переменной, связанной с сопротивлением сдвигу, характеризующих негазообразное свободнотекучее вещество в емкости. Способ измерения применяется к любым типам негазообразных и свободнотекучих материалов в емкости, таких как жидкие материалы, гомогенные и негомогенные и сыпучие твердые материалы, в том числе порошки и другие гранулированные материалы. В случае жидкостей переменная, связанная с сопротивлением сдвигу, характеризует вязкость жидкости. В случае сыпучих твердых материалов и негомогенных жидкостей переменная плотности в данном способе характеризует объемную плотность этих материалов.
В целом, разработанный процесс 1300 представляет собой последовательность следующих действий, графически представленных на фиг.13. Процесс 1300 начинается c блока 1302. B блоке 1304 измерительное устройство определяет оптимальное значение кинетической энергии, которое должно быть индуцировано в стенку емкости после момента приложения временной механической нагрузки, направленной в стенку. B блоке 1306 измерительное устройство инициирует вибрацию, по меньшей мере, в одной заранее заданной позиции на внешней стенке емкости, заполненной негазообразным или свободнотекучим веществом до известного уровня. B блоке 1308 измерительное устройство регистрирует вибрационный отклик стенки на механическую нагрузку. B блоке 1310 измерительное устройство анализирует регистрированный отклик. B блоке 1312 измерительное устройство получает значения, по меньшей мере, двух оценочных переменных, являющихся результатом анализа. B блоке 1314 измерительное устройство заполняет систему теоретических уравнений, включающих в себя, по меньшей мере, одну переменную, связанную с плотностью заполняющего материала, и одну переменную, связанную с сопротивлением сдвигу в качестве неизвестных, и, по меньшей мере, одну величину первой оценочной переменной и одну величину второй оценочной переменной. B блоке 1316 измерительное устройство решает систему уравнений относительно указанных неизвестных, при этом обеспечивая одновременное неинвазивное измерение переменной, связанной с плотностью и переменной, связанной с сопротивлением сдвигу заполняющего материала, находящегося в связанном объеме вблизи центра точки приложения механической нагрузки, приложенной к стенке емкости. Процесс 1300 заканчивается в блоке 1318.
Ниже каждое действие предложенного способа подробно описано для минимальной версии способа, включающего в себя единственный источник вибрации.
Блок 1304: Определение оптимального значения кинетической энергии, которая должна быть индуцирована в стенку емкости после момента приложения временной механической нагрузки, направленной в стенку.
Согласно физическим основам раскрытого способа измерения посредством удара, уровень точки, измерение плотности или вязкости требуют того, чтобы выходной сигнал датчика соответствовал определенным условиям представления сигнала.
Это условие может включать в себя величину динамического диапазона, значение наблюдения, основанное на времени окна, свойства затухания сигнала. Адаптивный процесс управления ударом предлагается для того, чтобы обеспечить соответствие выходного сигнала датчика требованиям представления сигнала, независимо от параметров применения измерения. Данная процедура осуществляет оптимизацию значения кинетической энергии, которое ударник индуцирует в стенку емкости, и требует выполнения следующих операций до начала измерения.
• Инициировать вибрацию стенки путем удара в стенку при определенном начальном значении кинетической энергии;
• регистрировать реакцию датчика;
• оценить выходной сигнал датчика относительно критерия представления сигнала;
• регулировать значение кинетической энергии, которое ударник индуцирует в стенку, согласно принципу оптимизации, такому как способ наискорейшего спуска;
• возвратиться к действию инициации вибрации, если оптимизация не достигнута;
• использовать полученное оптимальное значение кинетической энергии при измерении, после того как оптимизация достигнута.
Блок 1306: Инициировать вибрацию, по меньшей мере, в одном заранее заданном положении на внешней стенке емкости, заполненной некоторым материалом до заранее заданного уровня.
Вибрация возникает в окрестности приложения механического удара с его центром, расположенным на внешней стенке емкости. Временная диаграмма ударной нагрузки может быть различной формы, включая одиночный импульс, группу импульсов или непрерывную периодическую нагрузку. Каждый тип нагрузки позволяет любую модуляцию, например амплитудную модуляцию, частотную модуляцию, импульсно-кодовую модуляцию или их комбинации. В некоторых примерах механическое воздействие на стенку может осуществляться путем приложения любого подходящего источника энергии в зависимости от технических требований конкретного применения измерения. Подходящие источники энергии могут включать в себя соленоид, пружину, гидравлический или пневматический привод.
Блок 1308: Регистрировать колебательный отклик стенки на механическую нагрузку.
Механическая вибрация, зарегистрированная приемником измерительной системы, и запоминается в хранилище данных, таком, которое описано ниже со ссылкой на фиг.12, для последующего анализа.
Блок 1310: Анализировать зарегистрированный отклик.
Сохраненные квантифицированные наборы данных являются входными данными для последующей операции обработки данных, осуществляемой с помощью контроллера, который связан с хранилищем данных. В результате операции обработки данных формируют вектор информативных переменных, характеризующих энергию, временные и частотные спектральные свойства вибрационного отклика или сигнала, который может быть описан, но не ограничен следующими примерами. Переменные, характеризующие вибрационную энергию, могут включать в себя: а) набор максимумов выпрямленного вибросигнала, полученного на движущемся временном окне, которое превосходит время выборки; б) сумму этих максимумов; в) сумму разностей между соседними максимумами. Временные свойства вибрационного сигнала могут быть оценены по времени отклика, рассчитанного из условия, что регистрированный сигнал превышает некоторый заданный уровень. Другая переменная, характеризующая временные свойства сигнала, представляет собой логарифмический декремент сигнала или коэффициент затухания. Спектральные свойства сигнала могут быть оценены по представлению гармоник сигнала посредством применения быстрого преобразования Фурье, которое формирует амплитудный спектр сигнала, определенный на некотором диапазоне частот.
Блок 1312: Получение значений, по меньшей мере, двух оценочных переменных в результате анализа.
Две оценочные переменные основаны на векторе информативных переменных, сформированных в блоке 1310. Цель данного примера заключается в измерении, по меньшей мере, двух механических свойств заполняющего материала, следовательно, необходимы, по меньшей мере, две оценочные переменные, используемые при решении системы уравнений.
Эти две оценочные переменные, обозначенные 

где переменная 

 , что удовлетворяет условию (1.1).
, что удовлетворяет условию (1.1).
Блок 1314: Заполнение системы теоретических уравнений, включающих в себя, по меньшей мере, одну переменную, связанную с плотностью заполняющего материала, и одну переменную, связанную с сопротивлением сдвигу в среде, в качестве неизвестных, и, по меньшей мере, одно значение первой оценочной переменной и одно значение второй оценочной переменной.
Заранее заданная система основных уравнений включает в себя измеряемые переменные


Функции  и
и  из (1.3) представляют собой естественные законы, регулирующие отношения между переменными
из (1.3) представляют собой естественные законы, регулирующие отношения между переменными  и искомыми переменными . Например, в примере, когда емкость заполнена ньютоновской жидкостью, функции
и искомыми переменными . Например, в примере, когда емкость заполнена ньютоновской жидкостью, функции  и могут быть описаны системой уравнений, показанной на фиг.1.
и могут быть описаны системой уравнений, показанной на фиг.1.
На фиг.1 система уравнений представлена в форме Блочной Диаграммы Динамических Блоков, принятой в теории автоматического управления, например Mathematical Control Theory: Deterministic Finite Dimensional Systems. Second Edition. (Texts in Applied Mathematics/6), Eduardo D. Sontag, 1998), которая здесь включена в качестве ссылки в полном объеме. Здесь система основных уравнений (1.3) включает в себя систему уравнений Навье-Стокса, описывающих динамику жидкого содержимого емкости в эффективном объеме, связанном с математической моделью колебания стенки емкости в результате приложения механической нагрузки в направлении нормали к стенке емкости от ударника.
В случае, когда емкость заполнена сыпучим твердым материалом, функции  и могут быть описаны, например, для одномерной задачи Блочной Диаграммой, показанной на фиг.2. Фиг.2 отражает математическую модель гранулированного материала, представленную в работах доктора Loktionova в (Analysis of dynamics of vibration-based technologies and equipment for processing non-uniform loose solids: Loktionova O.G., Dr. Sci. Thesis Abstract, 35 pages/.), которая здесь включена в качестве ссылки в полном объеме. Другие примеры математических моделей для сыпучих твердых материалов можно найти в следующих документах:
FREE-FLOWING MEDIA DYNAMIC PROBLEMS: V.M. Sadovskii, Mathematical Modeling Vol. 13, No. 5, 2001/Institute of
Computational Modeling of Rus. Acad, of Sci., Kinematics of the motion of loose materials relative to rigid surfaces: S. B. Stazhevskii and A. F. Revuzhenko,, pp. 78-80, Particle size segregation in inclined chute flow of dry cohesionless granular solids: S. B. Savage and C. K. K. Lun, Journal of Fluid Mechanics (1988), 189:311-335 Cambridge University Press, A three-phase mixture theory for particle size segregation in shallow granular free-surface flows: A. R. THORNTON, J. M. N. T. GRAY and A. J. HOGG, Journal of Fluid Mechanics (2006), 550:1-25 Cambridge University Press., каждый из которых включен в качестве ссылки в полном объеме.
и могут быть описаны, например, для одномерной задачи Блочной Диаграммой, показанной на фиг.2. Фиг.2 отражает математическую модель гранулированного материала, представленную в работах доктора Loktionova в (Analysis of dynamics of vibration-based technologies and equipment for processing non-uniform loose solids: Loktionova O.G., Dr. Sci. Thesis Abstract, 35 pages/.), которая здесь включена в качестве ссылки в полном объеме. Другие примеры математических моделей для сыпучих твердых материалов можно найти в следующих документах:
FREE-FLOWING MEDIA DYNAMIC PROBLEMS: V.M. Sadovskii, Mathematical Modeling Vol. 13, No. 5, 2001/Institute of
Computational Modeling of Rus. Acad, of Sci., Kinematics of the motion of loose materials relative to rigid surfaces: S. B. Stazhevskii and A. F. Revuzhenko,, pp. 78-80, Particle size segregation in inclined chute flow of dry cohesionless granular solids: S. B. Savage and C. K. K. Lun, Journal of Fluid Mechanics (1988), 189:311-335 Cambridge University Press, A three-phase mixture theory for particle size segregation in shallow granular free-surface flows: A. R. THORNTON, J. M. N. T. GRAY and A. J. HOGG, Journal of Fluid Mechanics (2006), 550:1-25 Cambridge University Press., каждый из которых включен в качестве ссылки в полном объеме.
Математическое описание динамического поведения сыпучих твердых веществ чрезвычайно многомерно и зависит от специфики объекта измерения, поэтому множество других математических моделей динамической системы «Стенка емкости - Заполняющий материал» может использоваться для реализации блока 1314 данного способа в дополнение к приведенным моделям. Особый интерес представляют модели, использующие одновременно переменные плотности и сопротивления сдвигу, например на основе общеизвестного уравнения Бюргерса (Dave Harris proposal at, en.wikipedia.org/wiki/Burgers%27_equation), который здесь включен в качестве ссылки в полном объеме.
Блок 1316: Решение системы уравнений относительно неизвестных, таким образом осуществляя одновременное неинвазивное измерение переменной, связанной с плотностью и переменной, связанной с сопротивлением сдвигу заполняющего материала, присутствующего в связанном объеме вблизи центра механической нагрузки, приложенной к стенке емкости.
Системы уравнений со ссылками и функциями, показанными на фиг.1 и 2, не могут быть решены аналитическим способом даже в простейших случаях в связи с их нелинейностью.
Поэтому в некоторых примерах способ реализуется с помощью контроллера, имеющего аппаратные или программные устройства для решения систем уравнений в частных производных (Numerical Recipes in C++: The art of scientific computing/William H. Press, et al. - 2nd edition), для получения решения 
Следует отметить, что еще одна важная особенность настоящего изобретения заключается в том, что использование адекватной математической модели динамической системы «Стенка емкости -Заполняющий материал» исключает необходимость калибровки последовательности измерений.
Кроме того, в случае, где одна из неизвестных переменных

где 



Уравнение (1.4) может быть решено аналитически в малой окрестности известного значения 

а) Построение экспериментальной кривой 
б) Решение уравнения 

где {λ*} обозначает набор предварительно измеренных значений переменной λ. Операция «Калибровка» представляет собой многоточечный измерительный процесс с минимальным количеством измерений, равным двум. Эта операция описывается следующей системой алгебраических уравнений:

где 


Процесс 1300 описывает одну определенную последовательность действий в определенном примере. Операции, включенные в процесс 1300, могут быть выполнены различными вычислительными системами, специально конфигурированными для решения вышеописанных вычислительных задач. Некоторые операции не являются обязательными и в таком случае могут быть опущены в соответствии с одним или несколькими примерами. Кроме того, порядок действий может быть изменен или иные действия могут быть добавлены без отклонения от основной идеи устройства и способов, описанных в настоящем документе. Кроме того, как отмечалось выше, по меньшей мере, в одном случае, действия выполняются на особенном, специально сконфигурированном устройстве, а именно вычислительное устройство сконфигурировано в соответствии с примерами, описанными в данном документе.
Полезность данного изобретения определяется чувствительностью колебания стенки к изменению плотности/вязкости заполняющего материала. Используя это в качестве цели, два испытания на чувствительность, проведенные на резервуарах, заполненных жидкостью (Испытание А) и сыпучим твердым материалом (Испытание B), будут описаны ниже.
Испытание А: Для того чтобы наблюдать влияние плотности/вязкости жидкого вещества на колебания стенки емкости, устройство мониторинга колебаний (OMD) было установлено на емкости. Схема экспериментальной установки показана на фиг.3. Устройство мониторинга колебаний было оснащено ударным механизмом, сконфигурированным для приложения механического воздействия (удара) на внешнюю стенку емкости и приемником на основе акселерометра, расположенным на корпусе ударника. Во время испытаний уровень жидкости в емкости оставался неизменным. Емкость находилась в фиксированном положении, предотвращающем движение во время заполнения или опустошения. Согласно процедуре испытаний емкость заполнялась различными экспериментальными жидкими веществами.
Вибрационный временной отклик 

Численные результаты Испытания А представлены в таблице 1 и графически показаны на фиг.4. Здесь значения плотностей для экспериментальных решений были определены непосредственно взвешиванием каждого образца в емкости известного объема при комнатной температуре; величины динамической вязкости были получены из статьи Viscosity (http://hypertextbook.com/physics/matter/viscosity/), которая включена в качестве ссылки в полном объеме.

Анализ данных Испытания А показал, что вибрационный отклик стенки емкости на каждый отдельный удар находится в обратной зависимости от значения кинематической вязкости гомогенной жидкости, заполняющей экспериментальную емкость на постоянном уровне L.
В одном из примеров способа переменная ускорения стенки, измеренная вблизи ударов, используется для оценки вибрационного отклика. Согласно примеру, переменная ускорения оценивается после приложения временной механической нагрузки (удара) к стенке, с последующим отводом ударника от стенки емкости. Однако оценка вибрации стенки не ограничивается процедурой описанной по формулам (1.5). Любой способ, определенный на временной или частотной области, обеспечивающий требуемую чувствительность к плотности/вязкости заполняющей жидкости может быть применен в соответствии с примерами, описанными в данном документе.
Испытание B
Краткое описание испытаний
Цель испытаний заключалась в получении, наблюдении и записи изменений в выходных данных вибрационного сигнала, вызванных изменениями в объемной плотности порошкообразного образца. Желаемые изменения плотности были получены следующими тремя способами:
• способ 1: Плотность была изменена путем модифицирования объема порошкообразногоо образца и поддержания массы порошка не измененной. Тест 1 был проведен по Способу 1.
• Способ 2: Плотность была изменена путем изменения массы порошкообразного образца и поддержания объема порошка неизменным. Тест 4 был проведен по Способу 2.
• Способ 3: Плотность была изменена с помощью вибрационного уплотнения. Тест 2 и Тест 3 были проведены по Способу 3.
Обработка данных
B течение этих тестов начальная объемная плотность порошкообразного образца рассчитывалась по формуле:

Причем вес был измерен в граммах-силы, а объем измерен в литрах. Схематическое изображение тестовой трубы с устройством (OMD), смонтированным на трубе, показано на фиг.5.
На протяжении этих тестов плотность порошкового образца рассчитывалась следующим образом:

где D обозначает внутренний диаметр трубы; H обозначает высоту трубы, h обозначает расстояние между верхней частью трубы до границы раздела порошка/воздуха, и g обозначает гравитационную постоянную.
Анализ данных
Оценка выходной величины OMD
В этих испытаниях выходные данные OMD были обработаны следующим способом:

где 
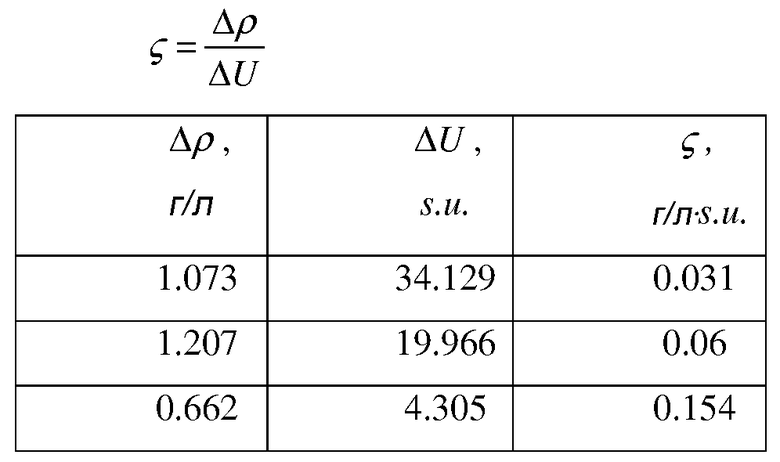
Экспериментальная чувствительность выходных данных OMD к объемной плотности образца была рассчитана в соответствии со следующими формулами:

где 
 обозначает чувствительность OMD к плотности образца;
обозначает чувствительность OMD к плотности образца; 




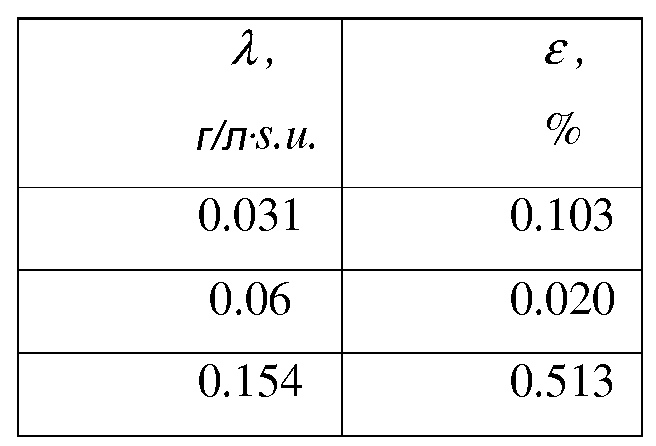
Повторяемость измерений объемной плотности рассчитывалась по следующим формулам:

где 

Для грубой оценки повторяемости измерения была использована следующая эмпирическая формула:

Тест 1. Объемная плотность образца была изменена способом сжатия. Записанные и обработанные экспериментальные данные представлены в таблице 2 и на графике, показанном на фиг.6.
Тест 2. Объемная плотность образца была изменена вибрационным способом. Записанные и обработанные экспериментальные данные представлены в таблице 3.
вибрация, y/n
Тест 3. Процедура теста 2 была повторена при установке OMD на стенке трубы на расстоянии 150 мм от верха трубы. Записанные и обработанные экспериментальные данные представлены в таблице 4 ниже.
вибрация, y/n
Тест 4. Объемная плотность образца была изменена путем добавления в трубу заранее заданной массы порошка и поддержания неизменного уровня материала. Записанные и обработанные экспериментальные данные представлены в таблице 5 ниже.
Анализ данных, полученных в Испытании B, позволяет сделать следующие два наблюдения.
Наблюдение 1
Небольшое увеличение плотности в непосредственной близости от OMD произвело почти пропорциональное увеличение значения показаний OMD. Это наблюдение подтверждается кривой на фиг.6, где плотность порошкообразного материала вблизи точки стенки трубы, расположенной на 500 мм ниже верхней части трубы, была изменена путем приложения относительно небольшой вертикальной нагрузки наверху трубы, Тест 1. То же замечание относится и к результатам Теста 2 и Теста 3.
Независимо от позиции OMD на стенке резервуара, как только вибрация была приложена к стенке, показания OMD уменьшились по сравнению с показаниями, полученными без вибрации. Фиг.7 показывает данные, подтверждающие это наблюдение.
Наблюдение 2
Значительное увеличение плотности близи от OMD произвело заметное уменьшение значения показаний OMD. Сравнение показаний OMD, полученных для положения 500 мм OMD на стенке резервуара с показаниями, связанными с положением 150 мм OMD на стенке резервуара, подтверждает правильность этого наблюдения (Тест 2, Тест 3). Разница в показаниях, записанных для положений 500 мм и 150 мм OMD, может быть связана с разницей между плотностями порошка, оцененными для каждого положения. Объемная плотность при 150 мм от верхней части трубы существенно меньше, чем плотность при 500 мм от верхней части трубы из-за эффекта компрессии верхних слоев порошка. Данные Теста 4 также подтверждают правильность этого наблюдения. В Тесте 4 добавление порошка при том же уровне материала привело к 35%-му снижению в показаниях OMD.
Явление противоположных тенденций в показаниях OMD, зависимое от начальных значений плотности, создает возможность для разработки измерительного инструмента с двойной шкалой, способного точно измерить объемную плотность порошка в весьма широким диапазонe.
Описанное выше явление может быть объяснено путем анализа аналитического выражения основной гармоники затухающего вибрационного отклика выходного сигнала (u(t)) датчика OMD на единичный удар, приложенный к стенке трубы. Математическое описание 

где U
m представляет амплитуду основной гармоники и α обозначает логарифмический декремент сигнала, характеризующий рассеивание механической энергии в динамической системе OMD ↔ Порошковый материал ↔ Стенка Трубы. Использование в формуле (1.8) переменной 

Графическое представление выражения (1.13) дано на фиг.8.
Процессы, показанные на фиг.8, иллюстрируют случай, когда плотности изменяются в относительно незначительных значениях, влияющих на логарифметический декремент α (внутреннее трение), но оставляют практически без изменений амплитуду основной гармоники. Сумма разностей соседних амплитуд для пунктирной кривой получается меньше, чем сумма разностей соседних амплитуд для сплошной кривой. В этом примере «пунктирная кривая» ассоциируется с материалом меньшей плотности и «сплошная кривая» ассоциируется с материалом большей плотности.
Обратная картина возникает, когда плотность порошкообразного материала изменяется значительным образом. В этом случае амплитуда основной гармоники исследуемой механической динамической системы заметно снижается в связи со значительным увеличением жесткости динамической механической системы. Применение формулы (1.13) здесь дает обратный результат. Чтобы доказать этот вывод, два гипотетических варианта были численно проанализированы при следующих параметрах:
Основанная на эксперименте Чувствительность OMD и Оцененная Повторяемость OMD
Различные типы переменных, оценивающих качество измерительного устройства, были описаны в формулах (1.9-1.13). Используя эти формулы и численные результаты Теста 1, можно определить чувствительность измерения плотности посредством OMD прототипа.
Экспериментальная Повторяемость Измерения Плотности с использованием OMD, полученная по формуле (1.11):

Результаты испытаний, проведенных в соответствии с планом Испытания B, продемонстрировали применимость способа настоящего изобретения для измерения объемной плотности твердых сыпучих материалов, в особенности очень легких порошков в диапазоне объемной плотности 20-150 г/л со средней повторяемостью 0,212%.
В целом, результаты описанных испытаний показали, что:
- Наблюдение за вибрационным откликом стенки емкости предоставляет информацию о плотности заполняющего материала с достаточной точностью, позволяющей создание устройств неинвазивного измерения, использующих стенки емкости в качестве чувствительной мембраны;
- Семейство способов для обработки данных может быть разработано на основе регистрации вибрационного отклика стенки емкости для измерения плотности или для измерения переменной, связанной с сопротивлением сдвигу, с точностью, которая соответствует или превосходит требования систем управления производственным процессом. В одном примере базовый набор формул для способа обработки данных может быть создан с использованием выражений (1.5, 1.8, 1.13).
Измерительное устройство
Согласно различным примерам, способ одновременного измерения плотности и переменной, связанной с сопротивлением сдвигу, осуществляется предлагаемым измерительным устройством. Принципы действия и функциональные возможности устройства будут описаны с помощью его функциональной блок-схемы, показанной на фиг.9. Измерительное устройство состоит из следующих функциональных блоков: Ударник 1, Блок 2 Управления Ударом, Приемник 3, Анализатор 4, Формирователь 5 Уравнений, Решатель 6 Уравнений и Блок 7 Выходного Интерфейса. Блоки 1 и 3 составляют Датчик/Приемник Модуль. Блоки 2, 4-6 составляют Обрабатывающий Модуль устройства. Согласно некоторым примерам, измерительное устройство может включать в себя компьютерную систему, подобную компьютерным системам, описанным ниже и показанным на фиг.14. Следует отметить, что вычислительное устройство в составе описываемого устройства измерения может быть относительно простой компьютерной системой, как, например, контроллер со встроенной памятью.
Выход блока Приемник 3 соединен с входом блока Анализатор 4. Первый выход блока Анализатор соединен с входом блока 2 Управления Ударом, выход которого подключен к входу блока Ударник соответственно. Второй выход блока Анализатор подключен к первому входу блока Формирователь 5 Уравнений. Третий выход блока Анализатор подключен ко второму входу блока Приемник. Заранее определенное предполагаемое значение переменной плотности формируется на 2-ом входе блока Формирователь Уравнений. Предопределенное предполагаемое значение переменной, связанной с сопротивлением сдвигу, формируется на 3-м входе блока Формирователь Уравнений. Вектор-выход блока Формирователь Уравнений связан с входом блока Формирователь 6 Уравнений, у которого первый выход является измеренной переменной плотности, а второй выход - измеренной переменной, связанной с сопротивлением сдвигу в среде. Первый вывод блока Формирователь Уравнений подключен к первому входу выходного устройства блока Выходной Интерфейс 7. Второй выход блока Формирователь Уравнений подключен ко второму входу блока Выходной Интерфейс описываемого устройства. Первый выход блока 7 предоставляет информацию об измеренной плотности за пределы измерительного устройства. Второй выход блока 7 предоставляет информацию об измеренной переменной, связанной с сопротивлением сдвигу за пределы измерительного устройства. Третий выход блока 7 представляет собой вектор двоичных тревожных сигналов для различных версий управления ВКЛ/ВЫКЛ.
Устройство работает в соответствии со следующим описанием. Управляемый сигналом от блока 2 Управления Ударом, который выполняет процедуру оптимизации удара в соответствии с операцией 1304 способа измерения, блок Ударник 1 подает механическое воздействие на стенку 8 емкости. Это воздействие может представлять собой единичный импульс, группу импульсов или непрерывную модулированную периодическую нагрузку. Стенка емкости возбуждается этим воздействием и, соответственно, вовлекает часть заполняющего материала 9 в колебательный процесс. Вибрационный отклик стенки регистрируется блоком Приемник 3. Блок Приемник 3 может включать в себя датчик вибрации и усилитель. Выход блока Приемник 3 может быть сглажен и подготовлен к дальнейшей обработке одной или нескольких процедур совместно с блоками Приемник 3 и Анализатор 4, аналогичных процедурам, описанным в выражениях (1.5, 1.8 и 1.13).
1-й выход блока Анализатор 4 управляет типом механического воздействия, которое блок Ударник 1 прилагает к стенке, путем изменения количества кинетической энергии, передаваемой ударником в стенку. В зависимости от типа энергии, используемой для приведения в движение ударного механизма, движущая сила может быть создана с помощью некоторой системы электромагнитного привода путем приложения электрического напряжения или изменяющегося во времени электрического тока, например к соленоиду или линейному двигателю, давлением или изменяющимся во времени расходом рабочего тела некоторой гидравлической или пневматической системы и т.д. 3-й выход блока Анализатор 4 управляет диапазоном сенсорной системы блока Приемник 3 в соответствии с критерием качества полученного вибрационного сигнала, таким образом замыкая обратную связь в Адаптивной Подсистеме Управления Ударом (ASCS), которая включает в себя функциональные блоки Приемник 3, Анализатор 4 и Управление Ударом 2 описываемого устройства. Обобщенная блок-схема ASCS для одного из возможных примеров исполнения показана на фиг.10. Согласно этой схеме, блок Оптимизатор Удара 4.2 анализирует вибрационный отклик стенки и автоматически изменяет динамику движения ударника, чтобы осуществить оптимизацию качества сигнала, получаемого блоком Приемник 3. Одна из возможных реализаций системы автоматического управления ударом изображена на фиг.11. ASCS, показанная на фиг.11, функционирует следующим образом. Группа датчиков 
Возвращаясь теперь к фиг.9, 2-й выход блока Анализатор представляет собой вектор-выход, включающий в общем случае измеряемые переменные 





Применения примеров, описанных здесь, могут включать в себя измерение иных переменных кроме плотности и вязкости или переменной, связанной с сопротивлением сдвигу. Например, сочетанием способа и устройства для измерения плотности с неинвазивным устройством измерения объемного расхода, например ультразвукового расходомера на основе эффекта Доплера, можно легко получить устройство настоящего изобретения, подходящее для измерения массового расхода, что является важной переменной, характеризующей самые разнообразные производственные процессы.
Другое применение одного из вариантов устройства позволяет осуществлять анализ вязкости и/или плотности материалов в поперечном сечении трубы. Это приложение описано со ссылкой на фиг.12. Поперечное профилирование вязкости/плотности негазообразного свободнотекучего материала может быть получено последовательным изменением ударной силы от слабых ударов к сильным (и, наоборот, от сильных ударов к слабым) так, что различные слои материала могут быть вовлечены в колебательный процесс. Другой пример того же приложения включает в себя акустический излучатель 1 и приемник 2, соответственно генерирующие и принимающие упругие волны, распространяющиеся через толщу содержащегося материала, в то время когда ударные воздействия прикладываются к внешней поверхности стенки. В этом случае акустические параметры волн, такие как амплитуда, сдвиг фазы, высшие гармоники акустического сигнала и т.д., становятся зависимыми от количества энергии, которую каждый удар привносит в колебательную систему, тем самым обеспечивая неинвазивное измерение плотности/вязкости на различных слоях содержимого трубы в направлении ее поперечного сечения.
На фиг.14 показана блок-схема компьютерной системы 302, в которой различные аспекты и функции, описанные здесь, могут быть реализованы. Компьютерная система 302 может включать в себя одну или несколько компьютерных систем, которые обмениваются информацией. Как показала практика, компьютерная система 302 может быть соединена, и может обмениваться данными через сеть связи. Сеть может быть любой сетью связи, через которую компьютерные системы могут обмениваться данными. Для обмена данными с помощью сети компьютерная система 302 и сеть могут использовать различные способы, протоколы и стандарты, в том числе, среди прочего, Fibre Channel, Token Ring, Ethernet, Wireless Ethernet, Bluetooth, IP, IPv6, TCP/IP, UDP, СПД, HTTP, FTP, SNMP, SMS, MMS, SS7, JSON, SOAP, CORBA, 25 REST и Web Services. Для обеспечения безопасной передачи данных компьютерная система 302 может передавать данные по сети, используя различные меры безопасности, в том числе, например, TSL, SSL или VPN. Сеть может включать любые средства и протоколы связи.
Фиг.14 иллюстрирует конкретный пример компьютерной системы 302. Как показано на фиг.14, компьютерная система 302 включает процессор 310, память 312, шину 314 данных, интерфейс 316, и хранилище 318 данных. Процессор 310 может выполнять ряд команд, которые манипулируют данными. Процессор 310 может быть коммерчески доступным процессором, таким как Intel Xeon, Itanium, Core, Celeron, Pentium, AMD Opteron, Sun UltraSPARC, IBM Power5 + или mainframe чип IBM и может представлять собой любой тип процессора - как многопроцессорный, так и контроллер. Процессор 310 связан с другими компонентами системы, в том числе с одним или несколькими устройствами памяти 312, на шине 314.
Память 312 может быть использована для хранения программ и данных во время работы компьютерной системы 302. Таким образом, память 312 может быть энергозависимой памятью значительно более высокого уровня, такой как динамическая оперативная память (DRAM) и статическая память (SRAM). Тем не менее, память 312 может включать любой прибор для хранения данных, такой как диск или другое энергонезависимое устройство. Различные исполнения могут организовать память 312 в специализированные, а в некоторых случаях уникальные структуры для выполнения описанных здесь функций.
Компоненты компьютерной системы 302 могут быть соединены элементом, таким как шина данных 314. Шина данных 314 может включать в себя один или несколько физических шин, например шины между компонентами, которые объединены в одной машине, но могут включать в себя любое сообщение между элементами системы, включая специализированные или стандартные вычислительные шиновые технологии, такие как IDE, SCSI, PCI и InfiniBand. Таким образом, шина 314 обеспечивает связь, передавая данные и команды, для обмена между компонентами компьютерной системы 302.
Компьютерная система 302 также включает в себя один или несколько интерфейсовых устройств 316, таких как устройства ввода, вывода и комбинированных устройств ввода/вывода. Интерфейс устройства могут получить входную информацию или обеспечить вывод информации. В частности, устройства вывода могут формировать информацию для внешнего использования. Устройства ввода могут принимать информацию от внешних источников. Примеры интерфейсовых устройств включают клавиатуры, мыши, трекболы, микрофоны, сенсорные экраны, печатные устройства, дисплеи, динамики, сетевые карты и т.д. Интерфейсовые устройства позволяют компьютерной системе 302 обмениваться информацией и общаться с внешними потребителями информации, такими как пользователи и другие системы.
Хранилище 318 данных может включать устройство с независимым энергопитанием, в котором хранятся инструкции, которые определяют операции, выполняемые процессором 310. Хранилище 318 данных также может включать в себя информацию, которая записана на некотором носителе, и эта информация может обрабатываться процессором 310 во время выполнения программы. В частности, информация может храниться в одной или нескольких структурах данных, специально конфигурированных для экономии памяти и увеличения скорости обмена данными. Инструкции могут постоянно храниться в виде кодированных сигналов, и инструкции могут привести к выполнению процессором 310 любой из функций, описанных в настоящем документе. Носитель памяти может, например, представлять собой оптический диск, магнитный диск или флэш-память. В процессе работы процессор 310 или другой контроллер может осуществлять чтение данных из электронезависимого устройства записи, такого как память 312, что позволяет ускорить доступ к информации для процессора 310, который обеспечивает хранение в хранилище 318 данных. Память может находиться в хранилище данных 318 или в памяти 312, тем не менее, процессор 310 может работать с данными в памяти 312, а затем скопировать данные на запоминающее устройство, связанное с хранилищем данных 318, после завершения обработки. Различные компоненты могут управлять перемещением данных между запоминающим устройством и других элементов памяти, и примеры не ограничиваются конкретным компонентом управления данных. Кроме того, примеры не ограничиваются определенной системной памятью или системой хранения данных.
Хотя компьютерная система 302 показана как один из видов компьютерных систем, на котором различные аспекты и функции устройства могут быть реализованы, эти аспекты и функции не ограничиваются реализацией на компьютерной системе 302, как показано на фиг.3. Различные аспекты и функции могут реализовываться на одном или нескольких компьютерах с другими архитектурами и компонентами, как показано на фиг.3. Например, компьютерная система 302 может включать в себя специально запрограммированные интегральные схемы (ASIC), созданные с учетом выполнения функций изобретенного устройства. В то время как другой пример исполнения устройства может выполнять те же функции, используя сеть из нескольких универсальных вычислительных устройств на операционной системе Mac OS X, система с процессорами PowerPC компании Motorola и несколько специализированных вычислительных устройств на основе специализированных операционных систем.
Компьютерная система 302 может быть системой, включающей операционную систему, которая управляет, по меньшей мере, частью аппаратных элементов, входящих в компьютерную систему 302. В некоторых примерах исполнения, процессор или контроллер, например процессор 310, имеет операционную систему. Примеры конкретных операционных систем, которые могут быть использованы, включают в себя операционные системы типа Windows, такие как Windows NT, Windows 2000 (Windows ME), Windows XP, Windows Vista или операционные системы Windows 7, корпорации Microsoft, MAC OS X кампании Apple Computer, одну из многих операционных систем на базе Linux-дистрибутивов, например операционная система Enterprise Linux кампании Red Hat Inc, операционная система Solaris кампании Sun Microsystems или операционные системы UNIX. Многие другие операционные системы могут быть использованы, и примеры не ограничиваются какой-либо конкретной операционной системой.
Процессор 310 и операционная система вместе определяют компьютерную платформу, для которой могут быть написаны приложения на языках высокого уровня программирования. Эти приложения могут представлять собой исполнимый код, байт-код, интерпретируемый код, который общается по сети связи, например, Интернет, используя протокол связи, например TCP/IP. Кроме того, аспекты могут быть реализованы, используя объектно-ориентированные языки программирования, такие как Net, Smalltalk, Java, C++, Ada и C# (С-Sharp). Другие объектно-ориентированные языки программирования также могут быть использованы. Кроме того, могут быть использованы функциональный язык, скриптовый язык или логические языки программирования.
Кроме того, различные аспекты и функции могут быть реализованы в не запрограммированной вычислительной среде, например, документы, созданные в HTML, XML или другом формате, которые при просмотре в окне браузера программы реализуют функции графического интерфейса пользователя или выполняют другие функции. Кроме того, различные исполнения могут быть реализованы в соответствии с программой или не запрограммированными элементами или любой их комбинации. Например, веб-страница может быть реализована с использованием HTML, в то время как объект данных, вызываемых из веб-страницы, может быть написан на С++. Таким образом, примеры не ограничивается конкретным языком программирования, и любой подходящий язык программирования может быть использован. Таким образом, функциональные компоненты, описанные здесь, могут включать в себя различные элементы, например исполняемого кода, структуры данных и объектов, настроенных для выполнения функций, описанных в настоящем документе. Кроме того, аспекты и функции могут быть реализованы в аппаратных средствах, программных средствах или любой их комбинации. Таким образом, аспекты и функции могут быть реализованы в рамках способов, действий, систем, элементов систем и компонентов при помощи различных аппаратных и программных конфигураций, и примеры не ограничивается какой-либо конкретной распределенной архитектурой, сетью или протоколом связи.
В некоторых примерах компоненты, описанные здесь, могут регистрировать параметры, влияющие на функции, выполняемые компонентами. Эти параметры могут физически храниться в любой форме, подходящей памяти, включая энергонезависимую память (RAM) или энергозависимую память (например магнитный жесткий диск). Кроме того, параметры могут логически храниться в собственной структуре данных (базы данных или файл, созданный пользователем), либо в общей долевой структуре данных (например применение реестра, который определяется операционной системой). Кроме того, некоторые исполнения используют системный и пользовательский интерфейсы, что позволяет внешним участникам изменять параметры и тем самым управлять поведением компонентов.
Таким образом, описав несколько аспектов, по меньшей мере, одного исполнения устройства, можно оценить, что различные изменения, модификации и усовершенствования доступны специалистам в этой области. Такие изменения, модификации и усовершенствования охвачены описанием данного изобретения, его объемом применения, что демонстрируется приведенными примерами технической области, рассмотренными в настоящем документе. Соответственно, вышеприведенное описание и графический материал являются конкретными примерами реализации данного изобретения, неограничивающими область его применения.

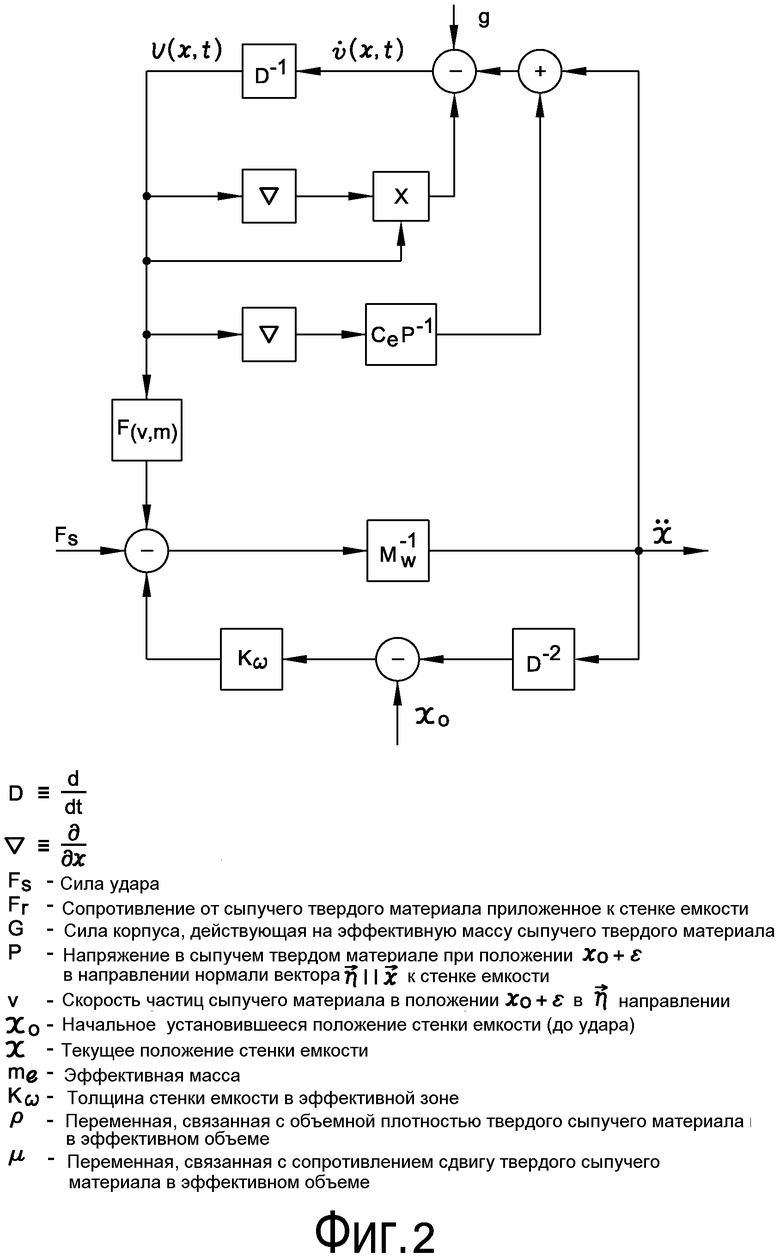

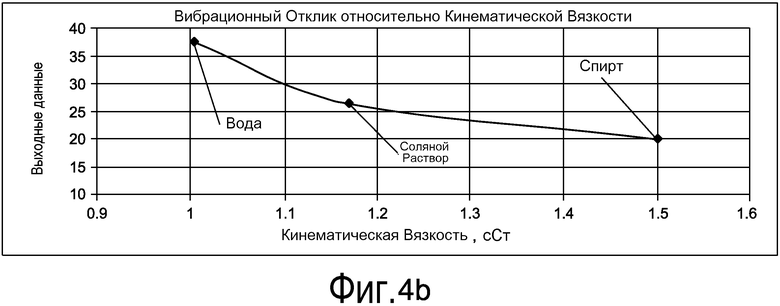

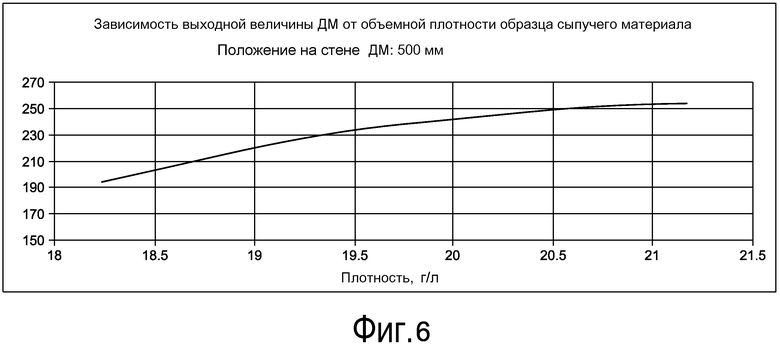
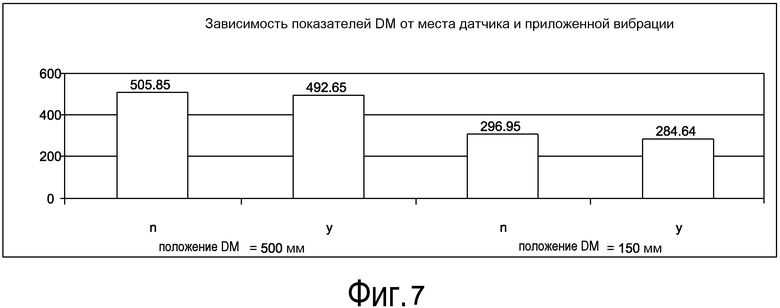

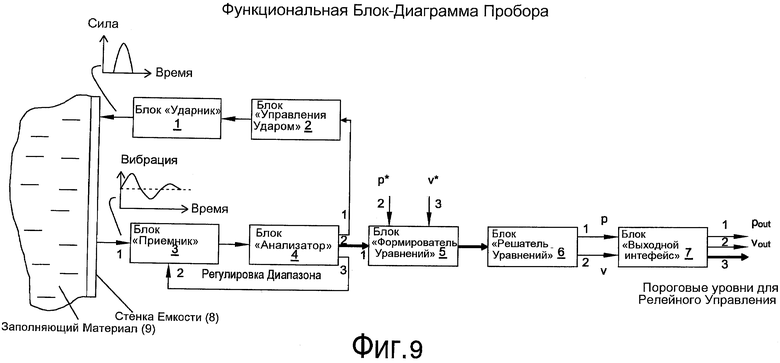
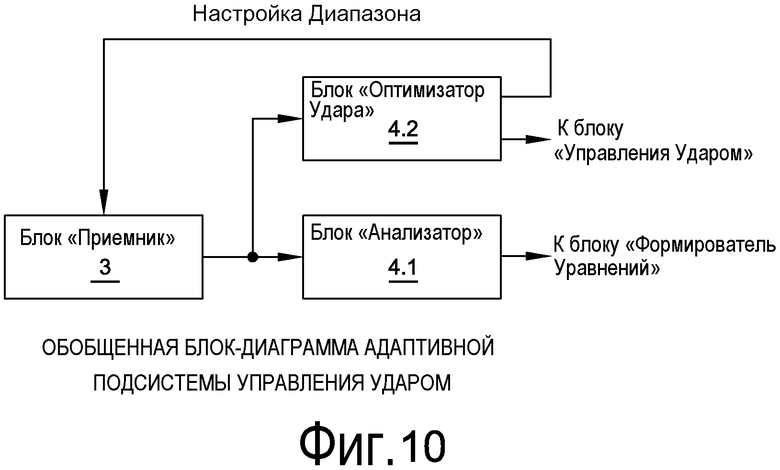
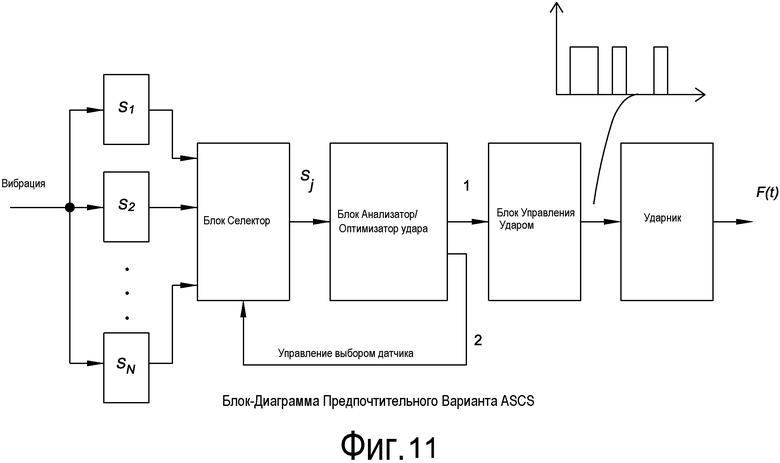

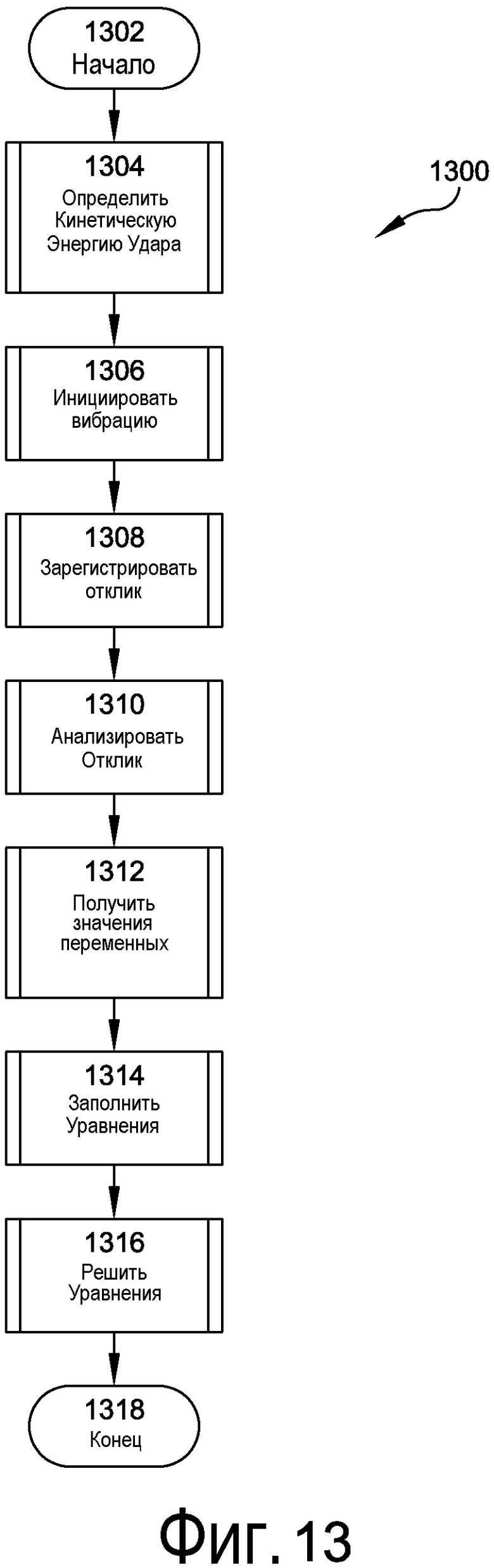

Настоящее изобретение относится к системам и способам для неинвазивного измерения механических свойств негазообразных, свободнотекучих материалов в емкости и, в частности, для определения плотности и параметров, связанных с сопротивлением сдвигу негазообразного, свободнотекучего вещества. Способ для неинвазивного одновременного определения плотности и переменной, связанной с сопротивлением сдвигу негазообразного, свободнотекучего вещества, заключается в том, что оно расположено в емкости на известном или постоянном уровне. В соответствии с примером способ и устройство используют регулируемую математическую модель для определения плотности и переменной, связанной с сопротивлением сдвигу на основе измерений системы, содержащей заполняющий материал, стенку емкости и динамический измерительный инструмент, взаимодействующий со стенкой. Техническим результатом является обеспечение возможности расширения диапазона измерений, повышение точности измерений и обеспечение большей применяемости ультразвуковых способов для измерения физических свойств негазообразных материалов. 2 н. и 26 з.п. ф-лы, 15 ил., 5 табл.
1. Способ измерения физических свойств материала в емкости, содержащий:
инициацию вибрации на стенке емкости;
регистрацию отклика на вибрацию;
получение величин, по меньшей мере, для двух оценочных переменных на основе отклика; и
решение системы уравнений, включающих в себя, по меньшей мере, одну переменную плотности и, по меньшей мере, одну переменную, связанную с сопротивлением сдвигу в среде с использованием, по меньшей мере, двух оценочных переменных.
2. Способ по п.1, в котором инициация вибрации включает в себя приложение механической нагрузки к внешней стенке емкости.
3. Способ по п.2, в котором приложение механической нагрузки включает в себя приложение, по меньшей мере, единичного нагрузочного импульса, группы импульсов или непрерывной периодической нагрузки.
4. Способ по п.1, в котором инициация вибрации включает в себя инициацию вибрации в материале, причем материал представляет собой, по меньшей мере, одно из гомогенной жидкости, сыпучего твердого вещества и гетерогенного вещества, включающего в себя смесь жидких и твердых материалов.
5. Способ по п.1, в котором регистрация отклика включает в себя регистрацию информативных переменных, характеризующих отклик стенки на вибрацию.
6. Способ по п.1, дополнительно содержащий анализ отклика для определения, по меньшей мере, одного из набора максимумов сигнала, полученного на временном окне, которое превосходит время выборки, сумму указанного набора максимумов и сумму разностей между соседними максимумами в наборе.
7. Способ по п.1, дополнительно содержащий анализ отклика, для определения логарифмического декремента сигнала или коэффициента затухания.
8. Способ по п.1, дополнительно содержащий анализ отклика для определения амплитудного спектра сигнала.
9. Способ по п.1, дополнительно содержащий регулирование количества кинетической энергии, используемой для инициации вибрации посредством анализа отклика.
10. Способ по п.9, в котором регулирование количества кинетической энергии включает в себя оценку отклика на вибрацию, которая соответствует заранее определенному набору пороговых характеристик.
11. Способ по п.1, в котором решение системы уравнений включает в себя:
заполнение системы уравнений с использованием, по меньшей мере, двух оценочных переменных; и
решение системы уравнений относительно, по меньшей мере, одной переменной плотности и, по меньшей мере, одной переменной, связанной с сопротивлением сдвигу в среде.
12. Способ по п.1, в котором решение системы уравнений, включающей в себя, по меньшей мере, одну переменную плотности и, по меньшей мере, одну переменную, связанную с сопротивлением сдвигу в среде, включает в себя решение системы уравнений, включающей в себя переменную вязкости.
13. Способ по п.1, в котором приложение механической нагрузки включает в себя модулирование механической нагрузки в соответствии с, по меньшей мере, одной амплитудной модуляцией, частотной модуляцией, импульсной модуляцией, кодово-импульсной модуляцией и широтно-импульсной модуляцией.
14. Способ по п.1, в котором получение величин, по меньшей мере, для двух оценочных переменных включает в себя формирование информативных переменных из зарегистрированного сигнала.
15. Устройство для измерения физических свойств материала в емкости, содержащее:
ударник, сконфигурированный для инициирования вибрации на стенке емкости,
датчик, сконфигурированный для регистрации отклика на вибрацию, и
контроллер, сконфигурированный для получения значений, по меньшей мере, для двух оценочных переменных на основе отклика, и
решения системы уравнений, включающей в себя, по меньшей мере, одну переменную плотности и, по меньшей мере, одну переменную, связанную с сопротивлением сдвигу, используя, по меньшей мере, две оценочные переменные.
16. Устройство по п.15, в котором ударник сконфигурирован для приложения механической нагрузки к внешней стенке емкости.
17. Устройство по п.16, в котором механическая нагрузка включает в себя, по меньшей мере, одно из единичного импульса, группы импульсов или непрерывной периодической нагрузки.
18. Устройство по п.15, в котором материал может представлять собой, по меньшей мере, одно из гомогенной жидкости, твердого сыпучего материала и гетерогенного материала, включающего в себя смесь жидких и твердых материалов.
19. Устройство по п.15, в котором датчик сконфигурирован для регистрации информативных переменных, характеризующих отклик стенки на вибрацию.
20. Устройство по п.15, в котором контроллер дополнительно сконфигурирован для анализа отклика, для определения, по меньшей мере, одного из набора максимумов переменного сигнала, полученного на временном окне, которое превосходит время выборки, сумму указанного набора максимумов и сумму разностей между соседними максимумами в наборе.
21. Устройство по п.15, в котором контроллер дополнительно сконфигурирован для анализа отклика, для определения логарифмического декремента сигнала или коэффициента затухания.
22. Устройство по п.15, в котором контроллер дополнительно сконфигурирован для анализа отклика, для получения гармонического спектра сигнала.
23. Устройство по п.15, дополнительно содержащее контроллер удара, соединенный с ударником и датчиком и сконфигурированный для регулирования, на основе анализа отклика, количества кинетической энергии, используемой ударником, для инициации вибрации.
24. Устройство по п.23, в котором контроллер удара дополнительно сконфигурирован для оценки отклика на вибрацию, которая соответствует заранее определенному набору пороговых характеристик.
25. Устройство по п.11, в котором контроллер сконфигурирован для решения системы уравнений посредством, по меньшей мере частично:
заполнения системы уравнений с использованием, по меньшей мере, двух оценочных переменных; и
решения системы уравнений относительно, по меньшей мере, одной переменной плотности и, по меньшей мере, одной переменной, связанной с сопротивлением сдвигу в среде.
26. Устройство по п.11, в котором, по меньшей мере, одна переменная, связанная с сопротивлением сдвигу в среде, включает в себя переменную вязкости.
27. Устройство по п.13, в котором механическую нагрузку модулируют в соответствии с, по меньшей мере, одной амплитудной модуляцией, частотной модуляцией, импульсной модуляцией, кодово-импульсной модуляцией и широтно-импульсной модуляцией.
28. Устройство по п.11, в котором контроллер сконфигурирован для получения величин, по меньшей мере, для двух оценочных переменных посредством, по меньшей мере частично, формирования информативных переменных из зарегистрированного сигнала.
| WO 2005062945 A2 14.07.2005 | |||
| US 20090084178 A1 02.04.2009 | |||
| EP1601936 A2 07.12.2005 | |||
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ СТЕНКИ ТРУБОПРОВОДА | 2000 |
|
RU2194977C2 |

